Study on the Prediction of Lane Change Intention of Intelligent Vehicles in the Network Environment



School of Transportation and Vehicle Engineering, Shandong University of Technology, 12 Zhangzhou Road, Zhangdian, Zibo 255049, China
*
Author to whom correspondence should be addressed.
World Electr. Veh. J. 2021, 12(1), 27; https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12010027
Submission received: 31 December 2020
/
Revised: 1 February 2021
/
Accepted: 9 February 2021
/
Published: 14 February 2021
Abstract
:The prediction of lane change intention of vehicles is an important part of the decision planning and control systems of intelligent vehicles. In the dynamic and complex traffic environment, the behaviors of traffic participants interact and influence each other. In lane change prediction, it is necessary to study the predicted vehicle and surrounding vehicles as an interactive correlation system. Otherwise, great errors are made in the motion prediction. Based on this, the motion state of the predicted vehicle, the position relationship between the predicted vehicle and lane, as well as the motion state of vehicles around the predicted vehicle are considered systematically in this paper, and the prediction of lane change intention of vehicles is studied. The influence of the three above-mentioned factors on the prediction of lane change intention is analyzed in this paper. On the basis of screening the prediction features of lane change intention, the lane change intention of vehicles is predicted by a feed-forward neural network. The data collected by the virtual driving experiment platform are divided into a training set, a verification set, and a test set. The neural network parameters of vehicles’ lane change intentions are identified by a training set, and the effect of prediction is tested by a verification set and a test set. The results show that the accuracy of the prediction model is high. The model is compared with the model of common features at the present stage and the model based on a Support Vector Machine, and the results show that the accuracy of the prediction model proposed in this paper was improved by 6.4% and 2.8%, respectively, compared with the two models. Finally, the virtual driving experiment platform was used to predict the lane change intention of the front vehicle and the vehicle in the left adjacent lane. The results show that, based on the same model and input features, the lane change intention of the front vehicle and the vehicle in the left adjacent lane can be predicted by the model at 2.8 s and 3.4 s before the lane change, and the model is a certain generality for the prediction of lane change intention of adjacent vehicles.
1. Introduction
At present, the primary cause of death in China is road traffic casualties [1]. With the development of intelligent vehicles, the prediction of lane change intention is an important part of the decision planning and control systems of intelligent vehicles. In the dynamic and complex traffic environment, if the lane change intention of surrounding vehicles can be accurately predicted by the ego vehicle, then the optimal decision of the ego vehicle can be made according to the future traffic conditions, and the occurrence of traffic accidents will be avoided.
The prediction of lane change intention of other vehicles has been studied by many scholars at home and abroad. The lateral distance between the predicted vehicle and the center of the original lane, lateral speed, and longitudinal speed of the predicted vehicle are taken as the input of the model, and a probabilistic method is proposed to predict the remaining time of the adjacent vehicle that is about to change lanes on the freeway [2]. The lane information, speed, and steering angle of the predicted vehicle are taken as the input of the model, and a prediction method of lane change intention of other vehicles based on the Support Vector Machine (SVM) and the Bayesian filter is proposed [3]. A Hidden Markov Model (HMM) method for the prediction of lane change intention of intelligent vehicles is proposed, based on the speed of the predicted vehicle and the offset between the predicted vehicle and the lane [4]. The relative lateral position of the ego vehicle and the predicted vehicle, the distance between the predicted vehicle and the center of the lane, and their first and second derivatives are taken as the features. The prediction model of other vehicles’ lane changes, based on the Dual Long and the Short-Term Memory Network, is established [5]. The parameters of motion state, lane departure data, and the yaw angle of the predicted vehicle are taken as features, and two prediction models of lane change intention of other vehicles, based on the SVM and the artificial neural network, are established [6]. The results show that the method is superior to the existing methods, in terms of the time and accuracy of the prediction. The image information of the predicted vehicle is captured by the camera of the ego vehicle, and a Convolution Neural Network-based model for predicting the lane change intention of other vehicles is designed [7]. The motion characteristics of the vehicle in front of the predicted vehicle and the vehicles in the adjacent lane are taken as the prediction features of the model, and the prediction model of lane change intention of other vehicles, based on a combination of the neural network and the Gaussian process, is established [8]. However, the situation where the vehicle in front of the predicted vehicle is blocked by other vehicles is ignored. The parameters, such as the relative speed of the predicted vehicle and the vehicle in front of it, are taken as the input characteristics of the model, and the prediction model of lane change intention of other vehicles, based on the extended Bayes model, is established [9]. However, the location of the ego vehicle is ignored, and the problems in reference [8] will also appear when the lane change intention of other vehicles is predicted by the ego vehicle.
To sum up, the prediction models of lane change intention of vehicles at the present stage are mostly based on the motion state of the predicted vehicle and the location relationship between the predicted vehicle and the lane, and the influence of the motion state of vehicles around the predicted vehicle on the lane change intention of other vehicles is less considered. In particular, the motion state of the front vehicle, which has an important impact on the decision-making of the predicted vehicle, is ignored because it is difficult to obtain the information of the motion state. However, with the development of the technology of vehicular networks, networked vehicles can obtain information on the motion state of surrounding vehicles through the network in real time. Therefore, it is necessary to make comprehensive and systematic use of the obtained information of vehicles to predict the behavior of future movement or the state of vehicles more accurately.
Based on this, the influence of the motion state of the predicted vehicle, the position relationship between the predicted vehicle and the lane, and the motion state of vehicles around the predicted vehicle on the prediction of lane change intention are considered systematically in order to improve the accuracy of the prediction of lane change intention in this paper. The prediction features of lane change intention were screened and the prediction model of vehicles’ lane change intentions was established by a feed-forward neural network. The model established in this paper was respectively compared with the model of common features at the present stage and the model based on SVM. Finally, the model was verified by the virtual driving experiment platform.
2. Feature Screening of Lane Change Intention of Other Vehicles
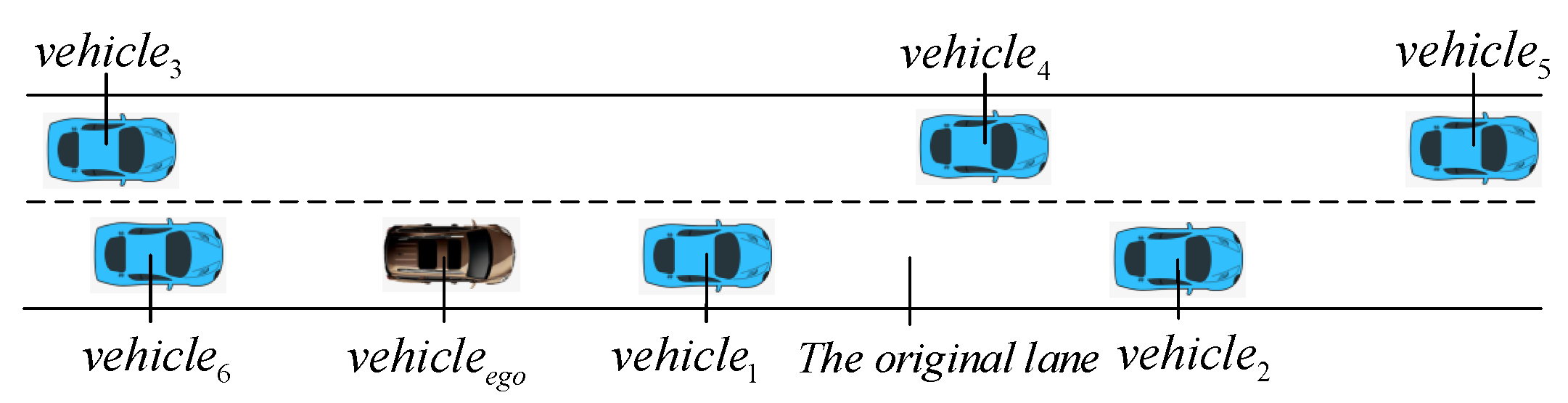
There are three kinds of operation options: a lane change to the left, a lane change going straight, and a lane change to the right, when the vehicle is moving on the road normally. Because the operations of a lane change to the left and a lane change to the right are essentially the same, they are also very similar in consideration of the relationship of the relative motion of the predicted vehicle and the vehicle in front of it, as well as the vehicle in the adjacent lane. Therefore, the predictions of lane changes to the left and straight-going intentions of other vehicles are studied in this paper. The traffic scenario is shown in Figure 1, and the related variables of vehicles during lane changes are shown in Table 1.
As shown in Figure 1, vehicle1 is the predicted vehicle, and the lane where vehicle1 goes straight is the original lane. If vehicle1 intends to change lanes to the left, the left lane of vehicle1 is the target lane. Vehicle6, vehicleego, vehicle1, and vehicle2 are in the right lane; vehicle3, vehicle4, and vehicle5 are in the left lane. The prediction of lane change intention of vehicleego is taken as an example in this paper, and the input features of the prediction of lane change intention of other vehicles are explained and screened.
Many characteristics of the vehicle itself will change during the process of going straight to a lane change, such as the yaw rate of the vehicle, the distance from the center of the lane, the lateral and longitudinal speed, acceleration, and so forth. It is necessary to screen out the features that can be used to predict the lane change intention of other vehicles. The yaw rate and lateral acceleration of vehicles are strongly influenced by road shape, so they cannot be used to predict the lane change intention of vehicle1 [10]. The change of the distance between vehicle and lane center is the most typical feature of vehicle lane change. The time when the lateral speed is greater than 0.2 m/s is taken as the starting time of the lane change [11], and the vehicle speed is one of the highest priority variables in the process of a lane change [12]. To sum up, the distance between vehicle1 and the center of the original lane (Y), lateral speed (vy), and vehicle speed (vc1) are the common features in studies on the prediction of lane change intentions of vehicle1 at the present stage [2,3,4,5,6]. However, vehicles generally decelerate in the exit phase of a lane change, while 59% of vehicles will accelerate in the entry phase of a lane change [13], which indicates that acceleration can be used as a predictive feature. Before a lane change, the turn signal should be turned on. The opening rate of the turn signal at the beginning of a lane change is 57%, and that which is in the 1 s before a lane change is 25% [14]. Therefore, the prediction of lane change intention of other vehicles cannot only rely on the status of the turn signal [15], and it cannot be used as a predictive feature. In this paper, based on the common features of lane change intention of vehicle1 at the present stage, acceleration (ac1) of vehicle1 is also taken as one of the prediction features.
The decision-making of vehicle1 mainly depends on the motion states of vehicle2, vehicle3, and vehicle4, and in order to predict the lane change intention of vehicle1 more accurately, the motion states of vehicle2, vehicle3, and vehicle4 should be considered. However, at present, researchers seldom consider this problem, especially the motion state of vehicle2, which has an important impact on vehicle1’s decision-making. Because the information of the motion state of vehicle2 is difficult to obtain, its influence on the decision of vehicle1 is ignored. Therefore, the information of the motion state of the surrounding vehicles is obtained by networked vehicles in real time through the network. The distance and relative speed among vehicle1, vehicle3, and vehicle4 are common features for the prediction of lane change intention of other vehicles at the present stage [8,9]. However, there are other parameters that affect the lane change intention of vehicle1: distance and collision time among vehicle1 and vehicle2, and vehicle3 and vehicle4 [16,17], while the speed and acceleration of vehicle2, vehicle3, and vehicle4 are greatly related to distance and collision time. Therefore, D12, D13, D14, TTC12, TTC13, TTC14, vc2, vc3, vc4, ac2, ac3, and ac4 are regarded as prediction features in this paper.
To sum up, there are 7 common features at the present stage: D13, D14, vc13, vc14, Y, vy, and vc1, and 16 prediction features in this paper: Y, vy, vc1, ac1, D12, D13, D14, TTC12, TTC13, TTC14, vc2, vc3, vc4, ac2, ac3, and ac4. The output is the probability of the intention to go straight or change lanes to the left.
3. Establishment of the Prediction Model of Lane Change Intention
An artificial neural network (ANN) is a mathematical model simulating a biological network for information processing. It has strong self-learning, adaptive ability, generalization ability, and fault tolerance, so it has been widely used in intelligent prediction and intelligent driving in recent years. The structure of the feed-forward neural network is simple and can approach any continuous function and square-integrable function with any precision. Therefore, a feed-forward neural network was selected as the prediction model of lane change intention of other vehicles in this paper.
The establishment of a neural network model needs a lot of data. Thus, in this step, the virtual driving experimental platform was built, and then the relevant data were collected and processed. Finally, the neural model was trained by processed data.
3.1. The Virtual Driving Experimental Platform
The virtual driving experimental platform is an important tool to study “humans–vehicles–roads environments”. Due to its advantages of repeatability, safety, controllability, and environmental protection, it has been developed rapidly in recent years [18]. The virtual driving experimental platform consists of MATLAB 2016b, Prescan8.4, and Logitech G29. The virtual driving experimental platform is shown in Figure 2, which is used by drivers to simulate driving.
3.2. Data Collection and Processing
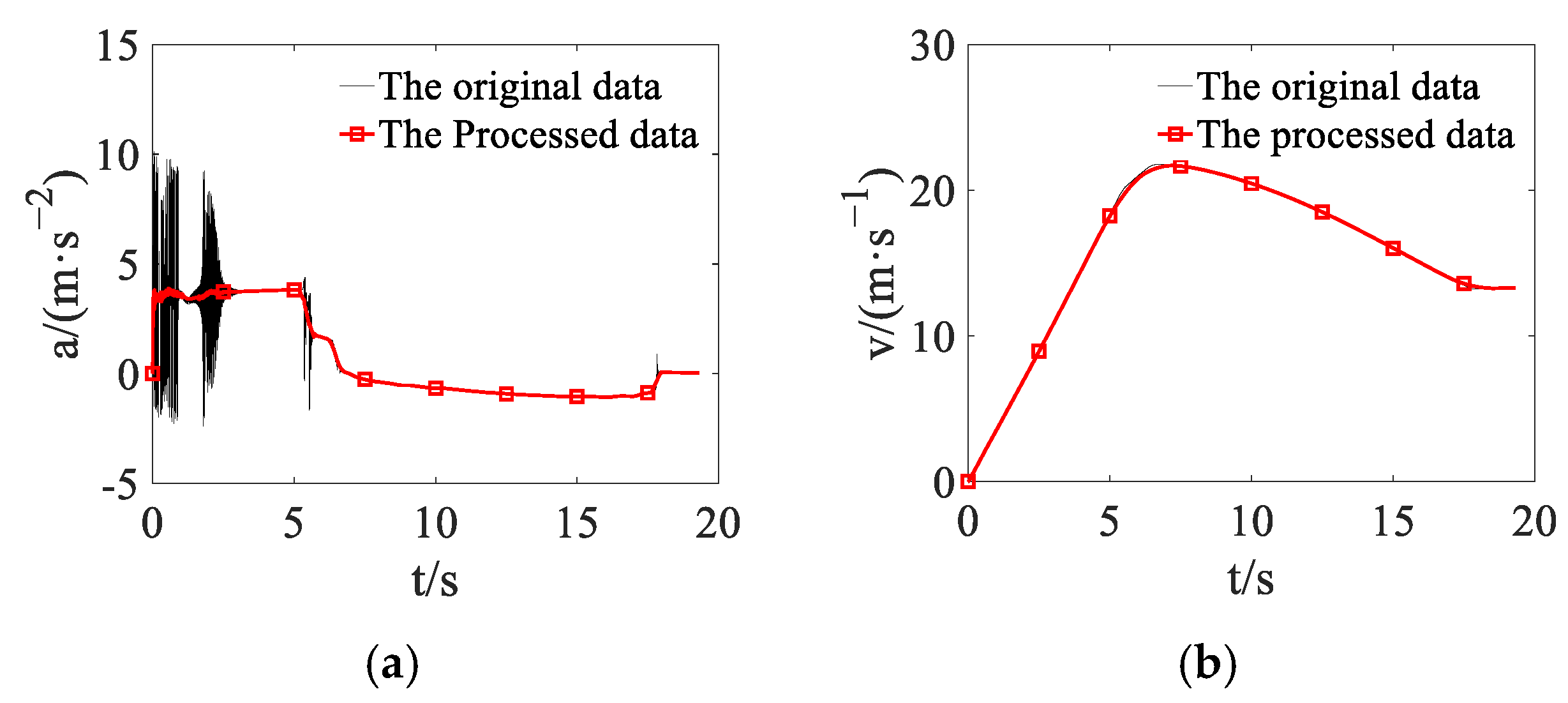
After the input features of the prediction of lane change intention of other vehicles were confirmed, the data was collected by the virtual driving experimental platform. Because only the prediction of the intention of going straight or change lanes to the left of vehicles was studied, the vehicle was driven straight and to the left in scenes of virtual driving. There are results showing that the lane change time is when the lateral speed of the vehicle was greater than 0.2 m/s [11]. According to this, two kinds of trajectories were randomly selected from the data, including 159 trajectories of going straight and 144 trajectories of lane changes to the left. The moving average filtering method [19] was used to filter and smooth the data. The processing of vehicle-related data is shown in Figure 3. In order to prevent the error of model training, the data with a time to collision (TTC) greater than 500 were replaced with 500.
3.3. Establishment of the Prediction Model of Lane Change Intention
There were three layers in the feed-forward neural network for prediction, namely the input layer, the hidden layer, and the output layer. The sigmoid function was used as a transfer function of the hidden layer, and the sigmoid function equation is defined by the following equation:
The Softmax function was used as the transfer function of the output layer. The Softmax function, also known as the normalized exponential function, is widely used in multi-classification problems, which presents the results of multi-classification in the form of probability. The outputs of the Softmax function are correlated and the sum of their probabilities is always 1.
The neural network was trained by the Scaled Conjugate Gradient (SCG) method. This algorithm is an improved algorithm proposed by Moller, based on the Conjugate Gradient (CG), which mainly changes its linear search method when calculating the search step size. The step size was calculated accurately, and the positive definiteness of the Hessian matrix was considered [20,21,22].
The step size of the CG was calculated as follows:
where is the search step size, is the search direction of the k + 1-th iteration, is the gradient direction of , , and is the total error performance function of the network output of the k-th iteration.
, , , so .
In the SCG algorithm, the following equation was used:
where λk is the introduced scale factor, which was adjusted to ensure the positive definiteness of the Hessian matrix. is the second derivative of the total error performance function of the network output when the linear search of the optimal distance of the k-th iteration is . is the first derivative of the total error performance function of the network output when the linear search of the optimal distance of the k-th iteration is .
We recorded the adjusted as , as , and as . If in an iteration, the Hessian matrix is not a positive definite. In this case, can be increased to make , and the specific increase was determined by the following calculation:
Then,
Equation (6) implies that if is raised with more than , then . The question is “how much should be raised to get an optimal solution?”
The following was a reasonable choice:
This led to the following:
The step size was given by
The search step size can be adjusted by adjusting the scale factor λk and the positive definiteness of the Hessian matrix can be ensured.
3.4. Training of Prediction Model of Lane Change Intention
A total of 720 sets of data were selected from the trajectories of lane changes to the left, including at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before the lane change. There were 795 sets of data selected from the trajectories of going straight, and altogether, there were 1515 sets of data. The data were divided into a training set, a verification set, and a test set, and the three data sets accounted for 70%, 15%, and 15% of the total data set, respectively. The training set was used to train the model. The function of the verification set was to test the generalization ability of the neural network. When the generalization ability stopped improving, the training of the neural network stopped. Finally, the test set was used to test the performance of the neural network. The number of neurons was determined by empirical Equation (10) [23].
where n is the number of neurons in the hidden layer and n1 is the number of nodes in the input layer. In this paper, n1 is 17, so n is 35.
All the data at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before the lane change were used as inputs to train the model. In order to ensure the reliability of the training results, the model was trained ten times, and then the average accuracy was taken. The accuracy of the model is shown in Table 2.
It can be seen from Table 2 that the highest accuracy of the prediction model was 97.4%, the lowest accuracy rate was 96.2%, and the average accuracy was 97%, indicating that the effect of the prediction model is good.
In order to verify the accuracy of the model at different times before the lane change, the intentions of other vehicles at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before the lane change were predicted based on the trained neural network model. The inputs of the model were the sample data of five moments and the accuracies of the corresponding results of the prediction model are shown in Table 3.
It can be seen from Table 3 that the accuracies of the prediction model at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before a lane change of other vehicles were 100%, 97.2%, 95.8%, 94.4%, and 94.4%, respectively, which indicates that the accuracy of the prediction model decreased with the increase of time before a lane change. Even if the accuracy of prediction was the lowest at 2 s before the lane change, the accuracy could still reach 94.4%, and the lane change intentions of other vehicles could be accurately predicted.
When some vehicles are missing, the missing vehicles have no influence on the lane change intention of the predicted vehicle. Therefore, the missing vehicle was set as a virtual vehicle that did not affect the lane change intention of the predicted vehicle, and its input characteristics were set as follows: In order to ensure the absolute safety of the predicted vehicle and the virtual vehicle, the predicted collision time was set to 500 s. The speed and acceleration were set to be the same as the predicted vehicle, and the distance (Dis) was calculated according to the maximum safe braking distance.
where vmax is the maximum speed of the vehicle; 120 km/h was used in this paper. a is the maximum deceleration of the vehicle; 5.9 m/s−2 was used in this paper. Therefore, the distance was 188.3 m.
In this way, the lack of some vehicles was represented as a virtual vehicle that did not affect the intention of the predicted vehicle to change lanes, and will not affect the accuracy of the model built in this paper.
3.5. Comparison with the Model of Common Features at the Present Stage
At the present stage, the common features are as follows: D13, D14, vc13, vc14, Y, vy, and vc1. The above data were calculated and extracted from the collected data to train the model. According to Equation (6), n1 is 7, so n is 15. Similarly, the data was divided into a training set, a verification set, and a test set, and the three data sets accounted for 70%, 15%, and 15% of the total data set, respectively. All the data at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before a lane change were used as inputs to train the model. In order to ensure the reliability of the training results, the model was trained ten times, and then the average accuracy was taken. The accuracy of the model is shown in Table 4.
It can be seen from Table 4 that the highest accuracy of the prediction model was 92.5%, the lowest accuracy was 88.5%, and the average accuracy was 90.6%. The average accuracy of the model established in this paper was 97.0%, which is 6.4% higher than that of the model of common features at the present stage, indicating that the effect of the prediction model established in this paper is better.
In order to verify the accuracy of the model at different times before a lane change, the intentions of other vehicles at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before a lane change were predicted based on the trained neural network model. The inputs of the model were the sample data of five moments and the accuracies of the corresponding results of prediction are shown in Table 5.
It can be seen from Table 5 that the accuracy of the prediction model was 100% at 0 s before the lane change of other vehicles. The Y and vy change obviously at 0 s before a lane change, so the starting time of a lane change can be accurately detected. The accuracies of prediction at 0.5 s, 1 s, 1.5 s, and 2 s before a lane change were 89.6%, 88.8%, 87.8%, and 87.1%, respectively, which were 7.6%, 7.0%, 6.6%, and 7.3% lower than the model established in this paper, fully proving that the effect of the prediction model established in this paper is better than that of this model.
The reason why the model established in this paper is better than the model of common features at the present stage is that the prediction models of lane change intention of vehicles at the present stage are mostly based on the motion state of the predicted vehicle and the location relationship between the predicted vehicle and the lane, and the influence of the motion state of vehicles around the predicted vehicle on the lane change intention of other vehicles is less considered. Based on this, the influence of the motion state of the predicted vehicle, the position relationship between the predicted vehicle and the lane, and the motion state of vehicles around the predicted vehicle on the prediction of lane change intention were considered systematically in this paper. The prediction features of lane change intention were screened and the prediction model of vehicles’ lane change intentions was established.
3.6. Comparison with the Model Based on SVM
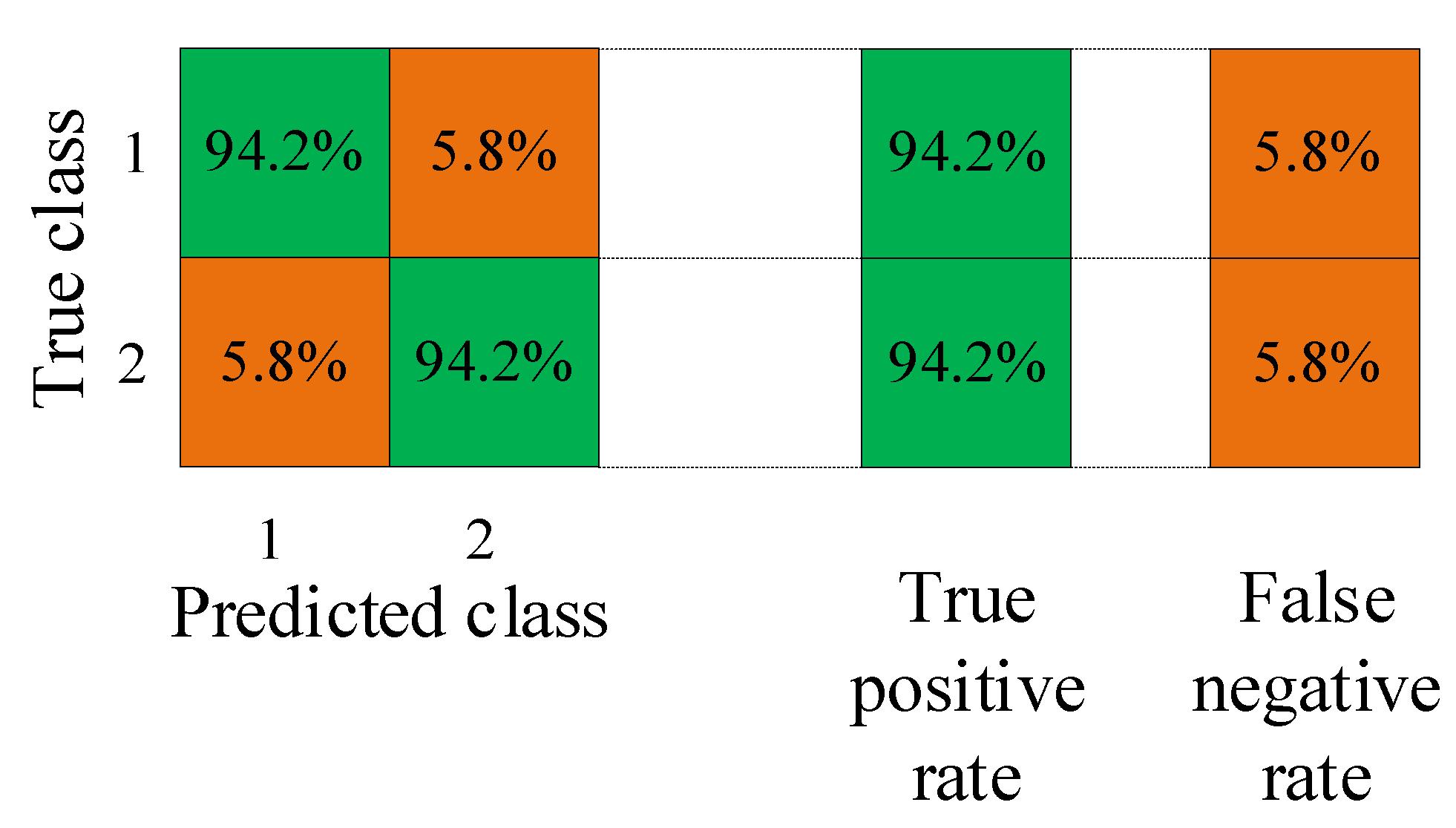
The SVM was trained with the data containing information of vehicle2, vehicle3, and vehicle4. About 70% of the data of the lane changes to the left and going straight were respectively used as a training set, and 30% of the data of the lane changes to the left and going straight were respectively used as a test set. The training results of the model based on the SVM are shown in Figure 4. As can be seen from Figure 4, the true positive rate of going straight and lane changes to the left is 94.2%, so the correct rate is 94.2%. However, the accuracy of the prediction model established in this paper was 97.0%, which is 2.8% higher than that of the SVM, which shows that the model established in this paper is more advantageous than the model based on the SVM.
The reason why the model built in this paper is better than the support vector machine model is that the neural network model has strong learning ability, strong robustness to noise, and fault tolerance, so the prediction effect is more advantageous than the prediction effect of the SVM.
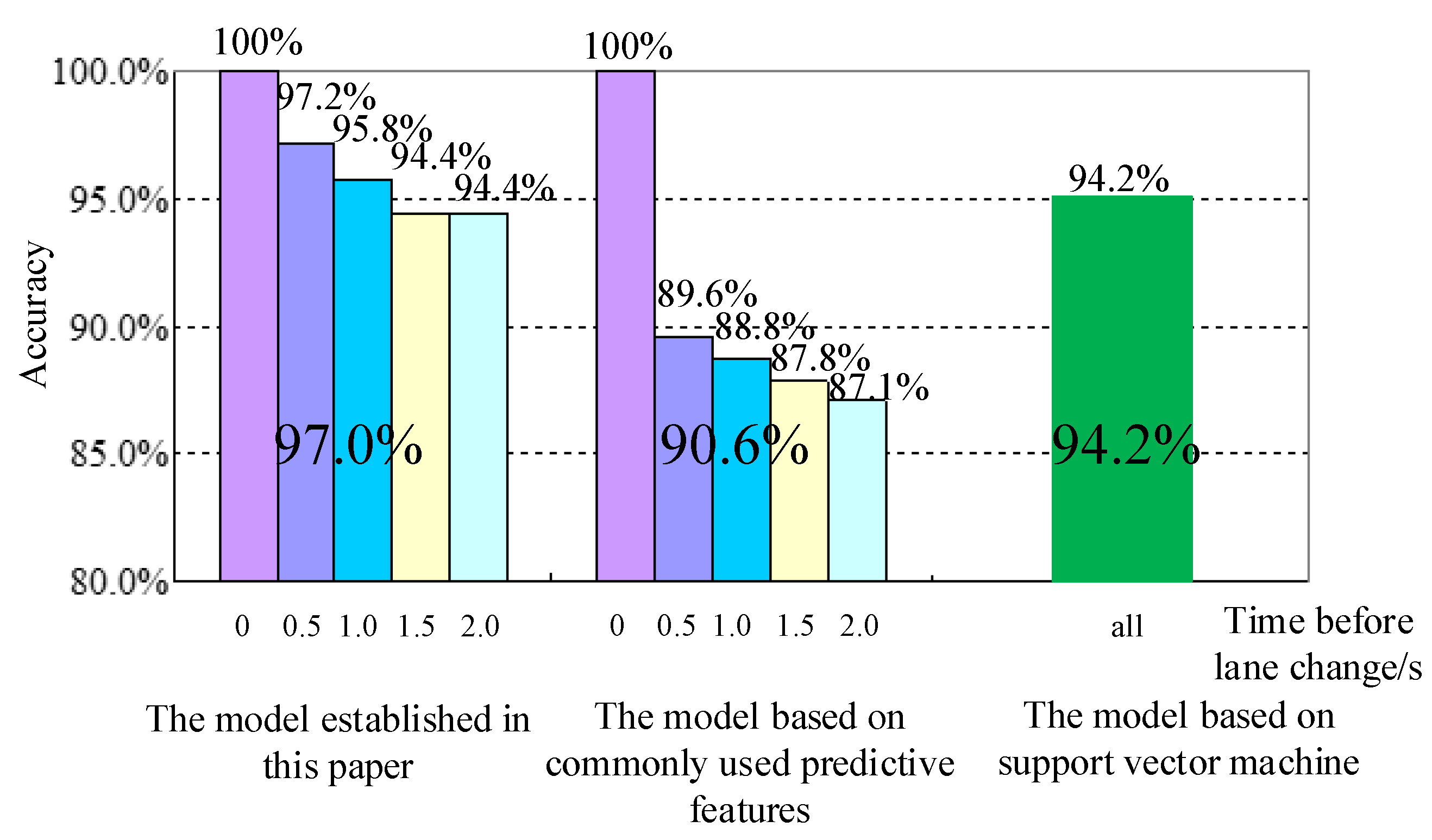
The difference of accuracy of prediction among the model established in this paper, the model of common features at the present stage, and the model based on the SVM can be observed more intuitively, so the histogram of the accuracy of the prediction of the three models was established and is shown in Figure 5. The accuracies of the prediction model established in this paper were 100%, 97.2%, 95.8%, 94.4%, and 94.4%, respectively, at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before a lane change of other vehicles. The accuracies of prediction of the common feature models at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before a lane change of other vehicles were 100%, 89.6%, 88.8%, 87.8%, and 87.1%, respectively. The accuracies of the prediction model based on the SVM were 94.2% for all data at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before other vehicles changed lanes.
4. Verification of Simulation Experiment
4.1. Prediction of Lane Change Intention of Vehicle1
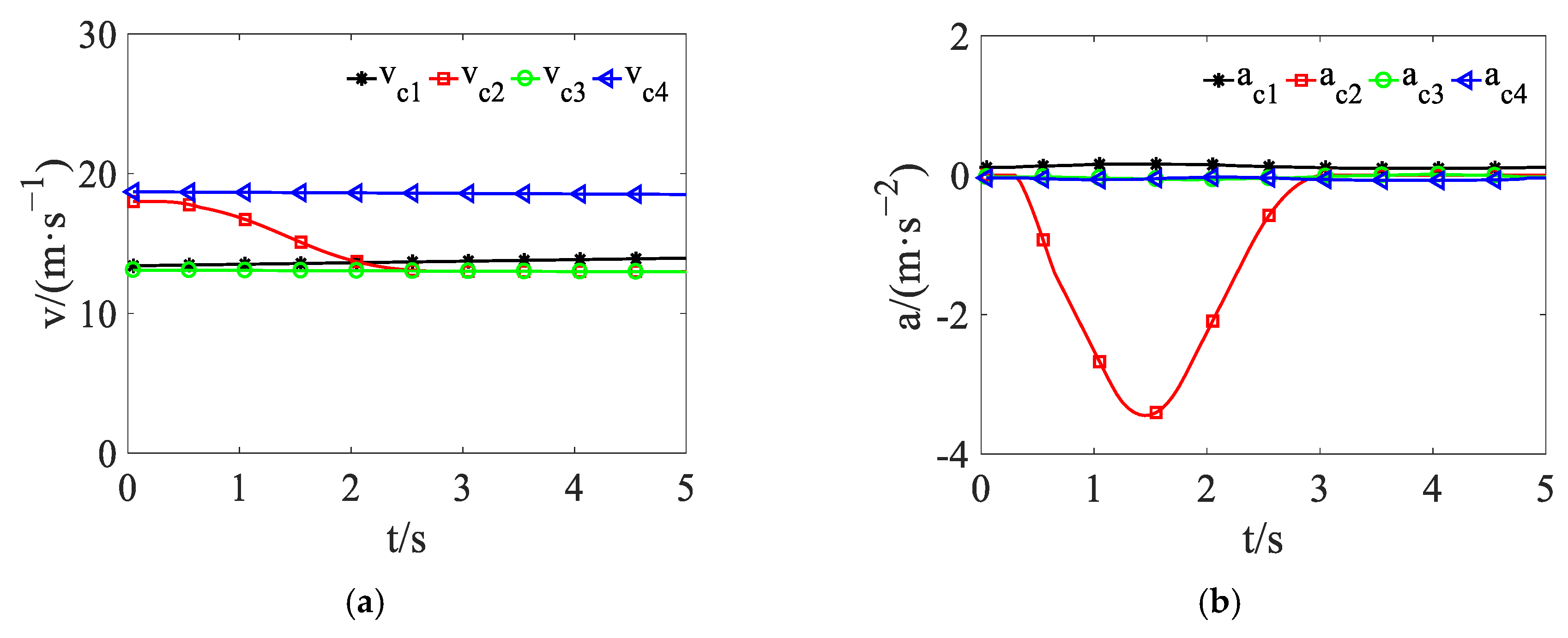
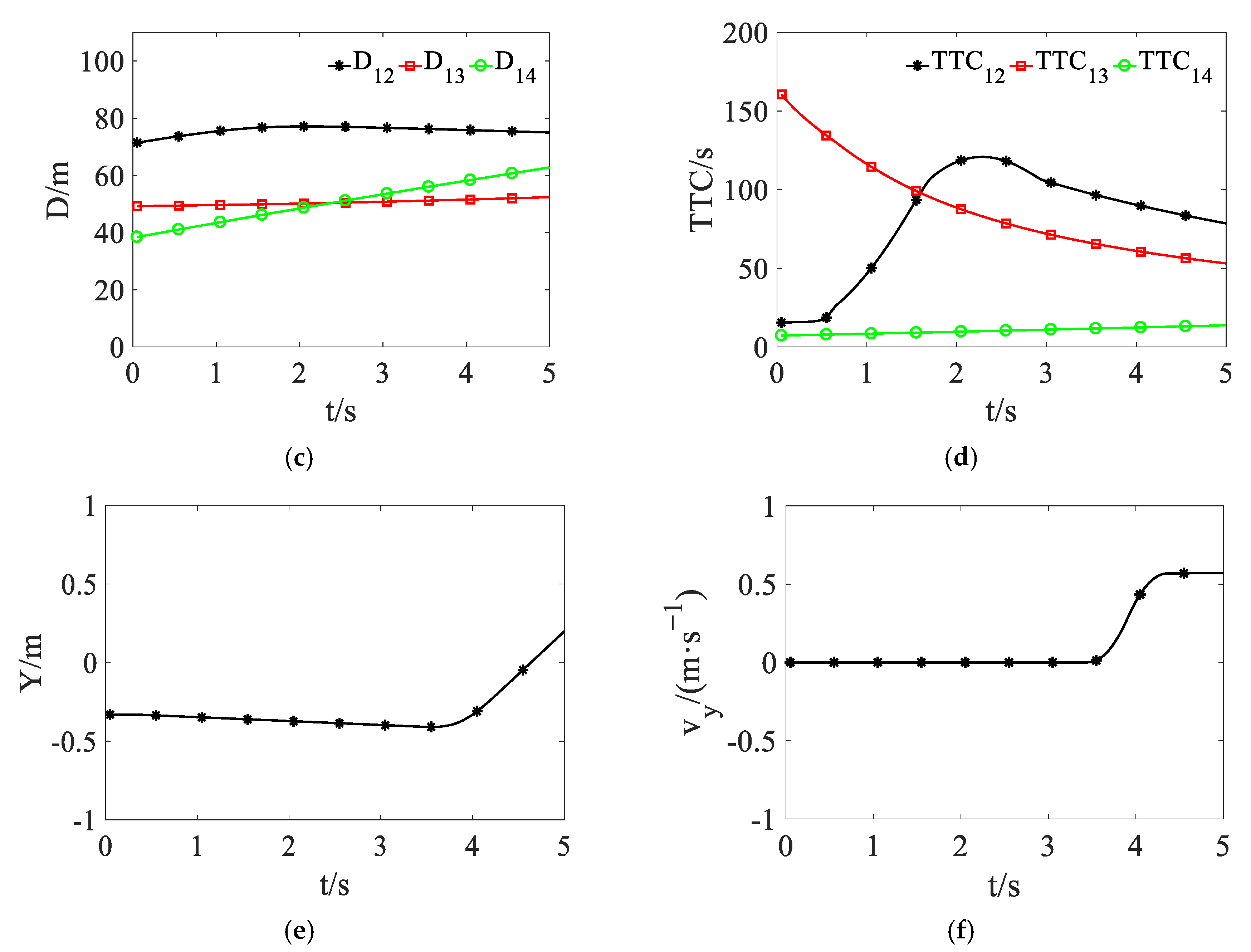
The lane change intention of vehicle1 was predicted by the virtual driving experimental platform, and the traffic scene is shown in Figure 1. The statuses of the input features are shown in Figure 6. The result of the prediction of the lane change intention of vehicle1 is shown in Figure 7, and the probability of going straight and changing lanes to the left are represented by P1 and P2, respectively. As the result of the prediction of intention is the probability, the intention with the maximum probability is the intention of other vehicles predicted by the model.
The speed and acceleration of the vehicles are shown in Figure 6a,b. It can be seen that vehicle1 moved at a constant speed of 13 m/s and vehicle2 moved at a constant speed of 18 m/s before 0.4 s. It began to decelerate at 0.4 s and then moved at a constant speed of 14 m/s after 2.8 s. Vehicle3 accelerated from 13 m/s to 14 m/s and vehicle4 moved at a constant speed of 19 m/s. The distance and the TTC between vehicle1 and related vehicles are shown in Figure 6c,d. It can be seen that D12 increased from 71 m to 75 m, and D13 increased from 50 m to 52 m. D14 increased from 40 m to 61 m. Affected by the distance between vehicle1 and related vehicles and the speed of related vehicles, TTC12 remained unchanged for 20 s before 0.4 s, and increased rapidly after 0.4 s. At 2.2 s, it reached the peak value of 120 s, and finally decreased to 78 s. TTC13 decreased from 170 s to 50 s, and TTC14 increased slowly from 10 s to 13 s.
The distance between vehicle1 and the center of the original lane and the lateral speed of vehicle1 are shown in Figure 6e,f. It can be seen that there were no changes before 3.8 s to the distance between vehicle1 and the center of the original lane and the lateral speed, but they obviously changed after 3.8 s, which indicates that vehicle1 changed lanes at 3.8 s. The result of the prediction of the lane change intention of vehicle1 is shown in Figure 7. It can be seen that the prediction result was going straight before 1 s, and the probability of a lane change to the left after 1 s was greater than that of going straight. Therefore, the predicted result was a lane change to the left at 1 s, while the real time of the lane change was 3.8 s. It shows that the lane change intention of vehicle1 at 2.8 s before the lane change could be predicted by the model in this simulation.
4.2. Prediction of Lane Change Intention of Vehicle4
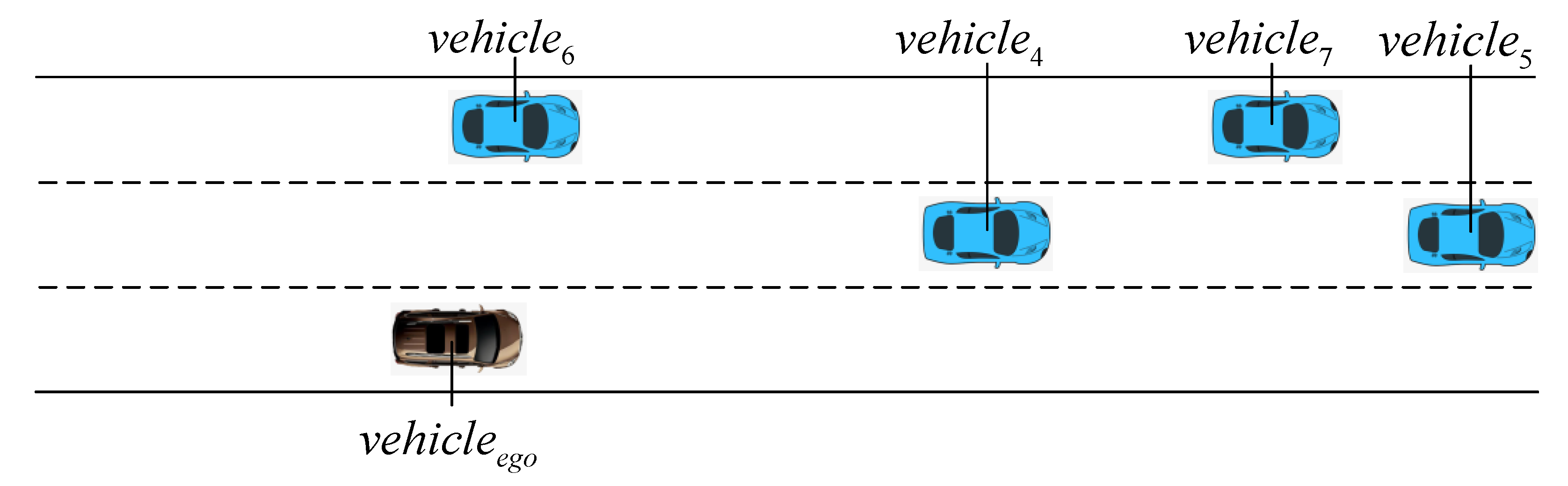
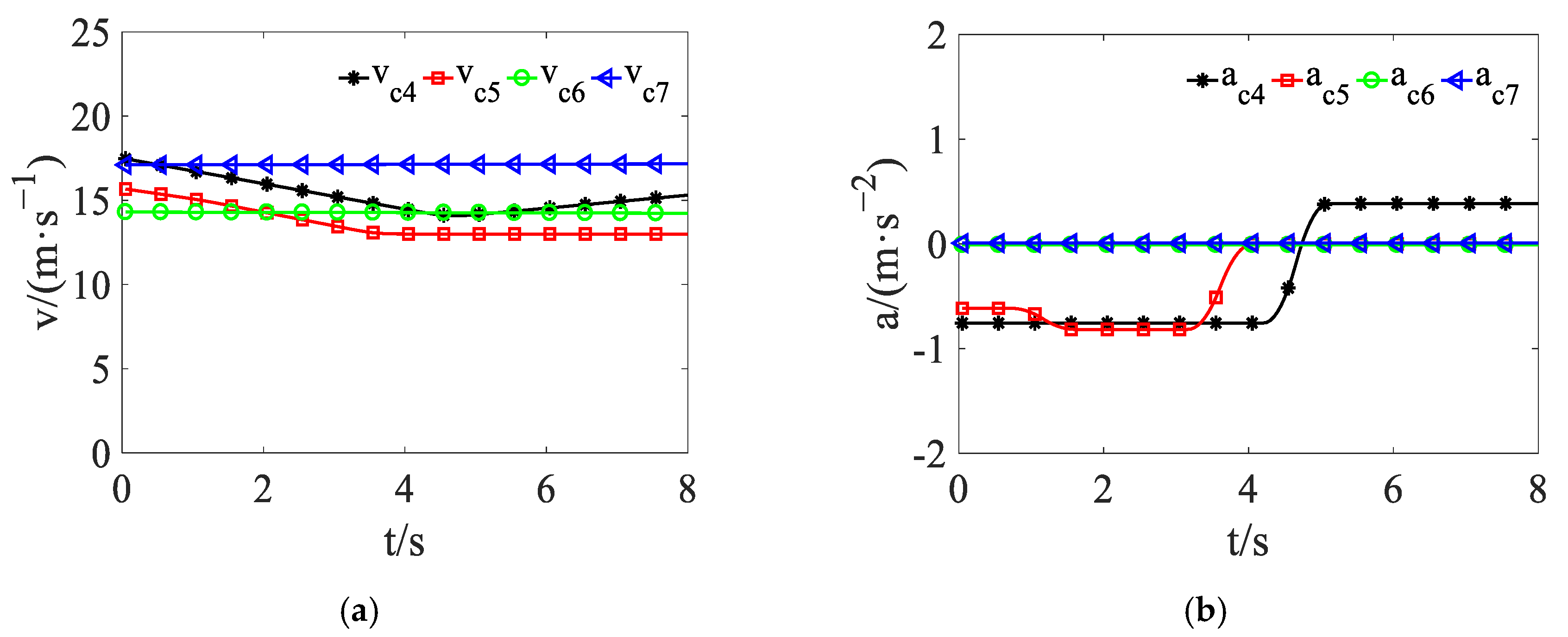
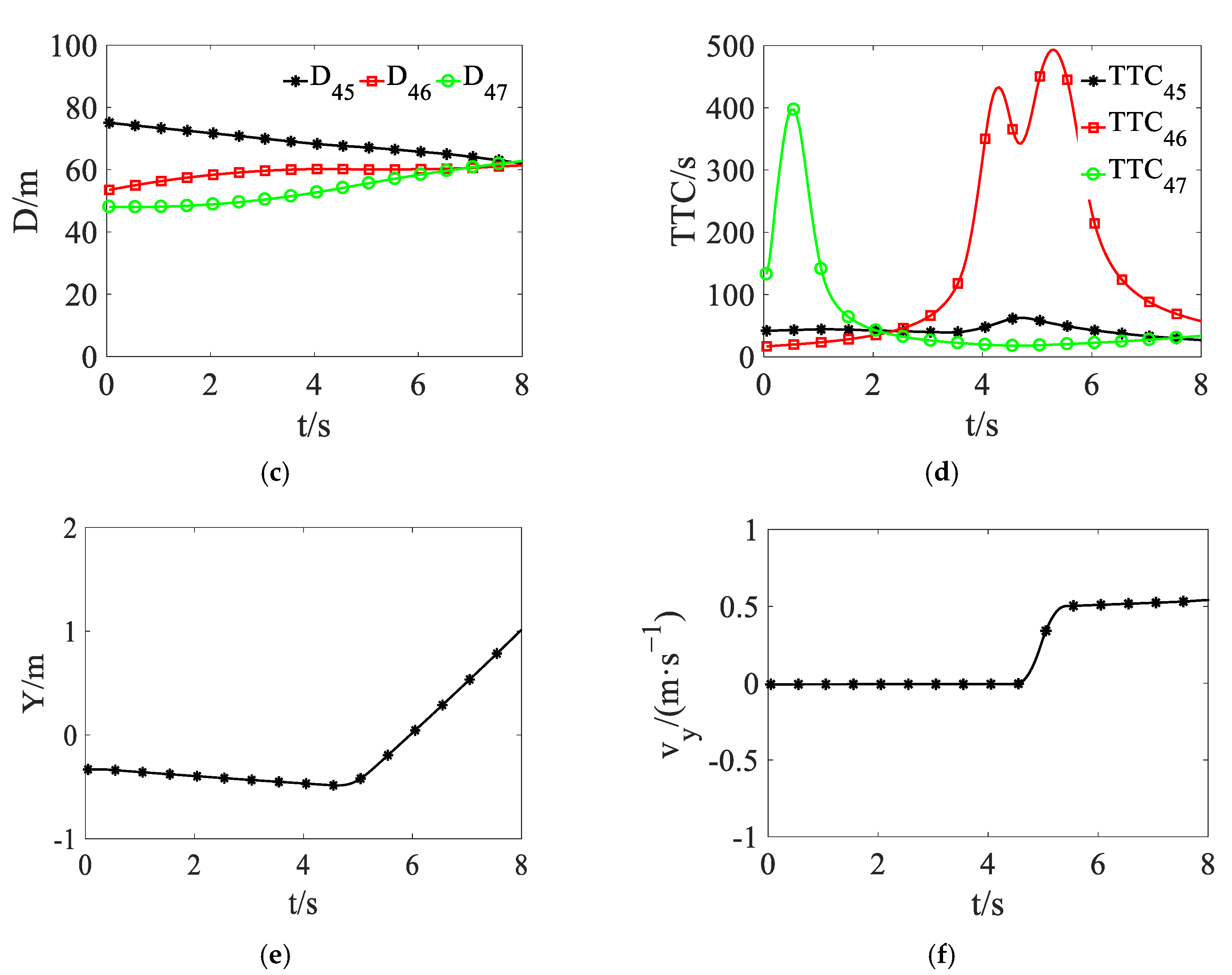
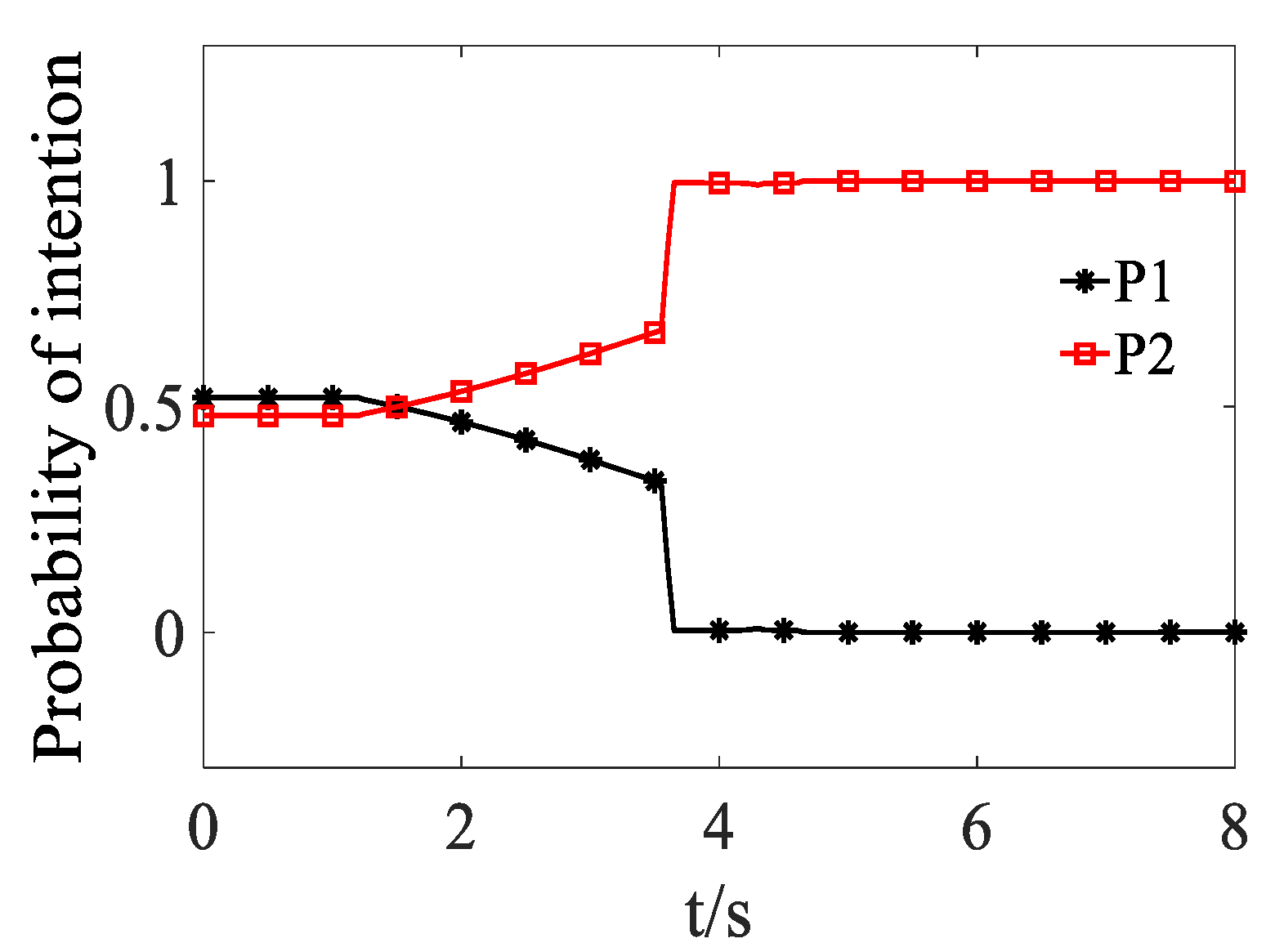
In order to verify the generality of this model for predicting the lane change intention of adjacent vehicles, the lane change intention of vehicle4 in the left adjacent lane was predicted by using the model. The traffic scenario is shown in Figure 8, with vehicle4 and vehicle5 in the left adjacent lane of the ego vehicle, and vehicle6 and vehicle7 in the leftmost lane. The statuses of the input features are shown in Figure 9. The result of the prediction of the lane change intention of vehicle4 is shown in Figure 10, and the probabilities of going straight and changing lanes to the left are represented by P1 and P2, respectively.
The speed and acceleration of the vehicles are shown in Figure 9a,b. It can be seen that the speed of vehicle4 started at 17.5 m/s and decelerated to 14 m/s at 4.6 s. Finally, it accelerated to 15.5 m/s. The speed of vehicle5 started at 15.5 m/s and decelerated to 13 m/s at 3.9 s. Vehicle5 moved to the end at 13 m/s. Vehicle6 and vehicle7 drove at a constant speed of 14 m/s and 17 m/s, respectively. The relative distance and TTC between vehicle1 and related vehicles are shown in Figure 9c,d. It can be seen that D45 started at 75 m and finally decreased to 61 m. D46 started at 52 m, and finally increased to 61 m. D47 started at 48 m and finally increased to 62 m. Affected by the distance between vehicle1 and related vehicles and the speed of related vehicles, TTC45 remained unchanged for 40 s before 4 s and increased rapidly after 4 s. It reached the peak value at 4.8 s, and then decreased to 25 s after 60 s. TTC46 started at 15 s and increased to 440 s at 4.3 s. It decreased to 350 s at 4.8 s and increased to 195 s at 5.4 s. Finally, it decreased to 55 s. TTC47 starts at 125 s and increased to 400 s at 1.6 s. It decreased to 350 s at 4.8 s.
The distance between vehicle4 and the center of the original lane and the lateral speed of vehicle4 are shown in Figure 9e,f. It can be seen that there were no changes before 5 s to the distance between vehicle4 and the center of the original lane and the lateral speed, but they obviously changed after 5 s, which indicates that vehicle4 changed lanes at 5 s. The result of the prediction of the lane change intention of vehicle1 is shown in Figure 10. It can be seen that the prediction result was going straight before 1.6 s, and the probability of a lane change to the left after 1.6 s was greater than that of going straight. Therefore, the predicted result was a lane change to the left at 1.6 s, while the real time of the lane change was 5 s. It shows that the model could predict the lane change intention of vehicle4 at 3.4 s before lane change in this simulation.
5. Conclusions
In order to improve the accuracy of the prediction of lane change intention of vehicles, the motion state of the predicted vehicle, the position relationship between the predicted vehicle and the lane, and the motion state of vehicles around the predicted vehicle were considered systematically in this paper. Then, the prediction of lane change intention of vehicles was studied. Through our research for this paper, the following beneficial conclusions were obtained:
- (1)
- There were 16 prediction features selected from three aspects, and the prediction model was established by a feed-forward neural network. Its validity was verified, and the results show that the accuracy of the prediction model established in this paper was 97.0% for all data at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before other vehicles changed lanes, and the accuracies of the prediction rates at the above five moments were 100%, 97.2%, 95.8%, 94.4%, and 94.4%, respectively. It shows that the model could accurately predict the lane change intention of other vehicles at 2 s before a lane change.
- (2)
- Using the same data, compared with the model of common features at the present stage and the model based on the SVM, the results show that the accuracy of the prediction model of common features at the present stage was 90.6% for all data at 0 s, 0.5 s, 1 s, 1.5 s, and 2 s before other vehicles changed lanes, and the accuracies of prediction at the above five moments were 100%,89.6%, 88.8%, 87.8%, and 87.1%, respectively. The accuracy of the prediction model based on SVM was 94.2% for all the data at the above five moments, which is lower than that of the model established in this paper, and which shows that the effect of the prediction model established in this paper is better than that of the other two models.
- (3)
- The lane change intention of vehicle1 and vehicle4 was predicted by using the virtual driving experimental platform. The results show that the lane change intention could be predicted at 2.8 s and 3.4 s before vehicle1 and vehicle4 changed lanes, respectively. It shows that the lane change intention of other vehicles could be predicted accurately by the model established in this paper, and it is the certain generality for the prediction of lane change intention of adjacent vehicles.
Author Contributions
Conceptualization, D.T.; methodology, S.L.; software, S.L.; validation, S.L., S.H. and H.F.; data curation, S.L.; writing—original draft preparation, S.L.; writing—review and editing, S.L. and S.H.; supervision, D.T.; project administration, D.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jiang, B.; Liang, S.; Peng, Z.; Cong, H.; Levy, M.; Cheng, Q.; Wang, T.; Remais, J.V. Transport and public health in China: The road to a healthy future. Lancet 2017, 390, 1781–1791. [Google Scholar] [CrossRef] [Green Version]
- Wissing, C.; Nattermann, T.; Glander, K.; Bertram, T. Probabilistic time-to-lane-change prediction on highways. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1452–1457. [Google Scholar] [CrossRef]
- Kumar, P.; Perrollaz, M.; Lefèvre, S.; Laugier, C. Learning-based approach for online lane change intention prediction. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 797–802. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Zheng, K.; Zhao, L.; Fan, P. A driving intention prediction method based on hidden markov model for autonomous driving. Comput. Commun. 2020, 157. [Google Scholar] [CrossRef] [Green Version]
- Xin, L.; Wang, P.; Chan, C.; Chen, J.S.; Li, E.; Cheng, B. Intention-aware Long Horizon Trajectory Prediction of Surrounding Vehicles using Dual LSTM Networks. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1441–1446. [Google Scholar] [CrossRef] [Green Version]
- Benterki, A.; Boukhnifer, M.; Judalet, V.; Choubeila, M. Prediction of Surrounding Vehicles Lane Change Intention Using Machine Learning. In Proceedings of the 2019 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019; pp. 839–843. [Google Scholar] [CrossRef]
- Lee, D.; Kwon, Y.P.; McMains, S.; Hedrick, J.K. Convolution neural network-based lane change intention prediction of surrounding vehicles for ACC. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Krüger, M.; Novo, A.S.; Nattermann, T.; Bertram, T. Probabilistic Lane Change Prediction using Gaussian Process Neural Networks. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3651–3656. [Google Scholar] [CrossRef]
- Schlechtriemen, J.; Wedel, A.; Hillenbrand, J.; Breuel, G.; Kuhnert, K. A lane change detection approach using feature ranking with maximized predictive power. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 108–114. [Google Scholar] [CrossRef]
- Toledo-Moreo, R.; Zamora-Izquierdo, M.A. IMM-Based Lane-Change Prediction in Highways With Low-Cost GPS/INS. IEEE Trans. Intell. Transp. Syst. 2009, 10, 180–185. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Li, Z.H.; Li, L. Investigation of Discretionary Lane-Change Characteristics Using Next-Generation Simulation Data Sets. J. Intell. Transp. Syst. 2014, 18, 246–253. [Google Scholar] [CrossRef]
- Balal, E.; Cheu, R.L.; Sarkodie-Gyan, T. A binary decision model for discretionary lane changing move based on fuzzy inference system. Transp. Res. 2016, 67, 47–61. [Google Scholar] [CrossRef]
- Luo, Y. Expressway Driving Behavior Recognition Based on GPS Data. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2017. [Google Scholar]
- Ma, Y.; Fu, R.; Guo, Y.S. Multi-parameter prediction of driver’s lane change behavior based on real-world driving tests. J. Chang’an Univ. (Nat. Sci. Ed.) 2014, 34, 101–108. [Google Scholar]
- Dang, R.N.; Wang, J.Q.; Li, K.Q.; Zhang, Q. Driver lane change characteristics for various highway driving conditions. J. Tsinghua Univ. (Sci. Technol.) 2013, 53, 1481–1485. [Google Scholar]
- Oliver, N.; Pentland, A.P. Graphical models for driver behavior recognition in a SmartCar. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511), Dearborn, MI, USA, 3–5 October 2000; pp. 7–12. [Google Scholar] [CrossRef]
- Wang, C.; Fu, R.; Zhang, Q.; Guo, Y.S.; Yuan, W. Research on Parameter TTC Characteristics of Lane Change Warning System. China J. Highw. Transp. 2015, 28, 91–100, 108. [Google Scholar]
- Wu, M.L. The Gender Sensibility Test and Analysis in a Driving Simulator Platform. Res. Explor. Lab. 2013, 32, 189–192. [Google Scholar]
- Thiemann, C.; Treiber, M.; Kesting, A. Estimating acceleration and lane-changing dynamics from next generation simulation trajectory data. Transp. Res. Rec. J. Transp. Res. Board 2008, 2088, 90–101. [Google Scholar] [CrossRef] [Green Version]
- Moller, M.F. A scaled conjugate gradient algorithm for fast supervised learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Qiao, S.; Lu, B. Research on cell interruption detection based on BP network based on SCG algorithm. Guangdong Commun. Technol. 2016, 36, 23–27. [Google Scholar]
- Xu, G.R.; Li, R.Q. Load Forecasting Analysis of BP Algorithm Based on Improved Standard of SCG. Electr. Switchg. 2014, 52, 11–13. [Google Scholar]
- Guo, Y.S.; Fu, R.; Zhao, K.; Ma, Y.; Yuan, W. Evaluation and test of real-time identification models of driver’s lane change intention. J. Jilin Univ. (Eng. Technol. Ed.) 2016, 46, 1836–1844. [Google Scholar]
Figure 1.
Traffic scenario.

Figure 2.
Simulated driving.

Figure 3.
The processing of vehicle related data. (a) The acceleration; (b) The speed.

Figure 4.
The training results of the model based on the SVM.

Figure 5.
Accuracy of the three prediction models.

Figure 6.
The status of the input features. (a) The speed; (b) The acceleration; (c) Distance between vehicle1 and related vehicles; (d) TTC of vehicle1 and related vehicles; (e) Distance between vehicle1 and the center of the original lane; (f) Lateral speed of vehicle1.
Figure 6.
The status of the input features. (a) The speed; (b) The acceleration; (c) Distance between vehicle1 and related vehicles; (d) TTC of vehicle1 and related vehicles; (e) Distance between vehicle1 and the center of the original lane; (f) Lateral speed of vehicle1.


Figure 7.
The prediction result of lane change intention of vehicle1.

Figure 8.
The traffic scenario.

Figure 9.
The status of the input features. (a) The speed; (b) The acceleration; (c) Distance between vehicle1 and related vehicles; (d) TTC of vehicle1 and related vehicles; (e) Distance between vehicle1 and the center of the original lane; (f) Lateral speed of vehicle1.
Figure 9.
The status of the input features. (a) The speed; (b) The acceleration; (c) Distance between vehicle1 and related vehicles; (d) TTC of vehicle1 and related vehicles; (e) Distance between vehicle1 and the center of the original lane; (f) Lateral speed of vehicle1.


Figure 10.
The prediction result of lane change intention of vehicle4.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Related variables of vehicles during lane change.
| Symbol | Definition |
|---|---|
| vehicleego | Ego vehicle |
| Y | Distance between predicted vehicle and the center of the original lane |
| vy | Lateral speed of the predicted vehicle |
| vci (i = 1, 2, …, 5) | Speed of vehiclei (i = 1, 2, …, 5) |
| vcin (i = 1, 2, …, 5; n = 1, 2, …, 5) | Relative speed of vehiclei and vehiclen (i = 1, 2, …, 5, n = 1, 2, …, 5) |
| aci (i = 1, 2, …, 5) | Acceleration of vehiclei(i = 1, 2, …, 5.) |
| Din (i = 1, 2, …, 5; n = 1, 2, …, 5) | Distance between vehiclei and vehiclen (i = 1, 2, …, 5, n = 1, 2, …, 5) |
| TTCin (i = 1, 2, …, 5; n = 1, 2, …, 5) | Time to collision of vehiclei and vehiclen (i = 1, 2, …, 5; n = 1, 2, …, 5) |
Table 2.
The accuracy of the model.
| Number of Training Sessions | Accuracy (%) |
|---|---|
| 1 | 97.4 |
| 2 | 97.4 |
| 3 | 96.2 |
| 4 | 97.2 |
| 5 | 96.4 |
| 6 | 96.4 |
| 7 | 96.6 |
| 8 | 97.8 |
| 9 | 97.0 |
| 10 | 97.3 |
| Average accuracy | 97.0 |
Table 3.
Accuracy of the prediction of other vehicles at five moments before a lane change.
| Prediction Moments | Accuracy (%) |
|---|---|
| At 0 s before lane change | 100 |
| At 0.5 s before lane change | 97.2 |
| At 1 s before lane change | 95.8 |
| At 1.5 s before lane change | 94.4 |
| At 2 s before lane change | 94.4 |
Table 4.
The accuracy of the model.
| Number of Training Sessions | Accuracy (%) |
|---|---|
| 1 | 89.8 |
| 2 | 89.3 |
| 3 | 92.5 |
| 4 | 88.5 |
| 5 | 92.3 |
| 6 | 92.5 |
| 7 | 88.7 |
| 8 | 92.4 |
| 9 | 89.4 |
| 10 | 90.9 |
| Average accuracy | 90.6 |
Table 5.
Accuracy of the prediction of other vehicles at five moments before a lane change.
| Prediction Moments | Accuracy |
|---|---|
| At 0 s before lane change | 100% |
| At 0.5 s before lane change | 89.6% |
| At 1 s before lane change | 88.8% |
| At 1.5 s before lane change | 87.8% |
| At 2 s before lane change | 87.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, S.; Tan, D.; Hong, S.; Fu, H. Study on the Prediction of Lane Change Intention of Intelligent Vehicles in the Network Environment. World Electr. Veh. J. 2021, 12, 27. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12010027
AMA Style
Liu S, Tan D, Hong S, Fu H. Study on the Prediction of Lane Change Intention of Intelligent Vehicles in the Network Environment. World Electric Vehicle Journal. 2021; 12(1):27. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12010027
Chicago/Turabian StyleLiu, Shuaishuai, Di Tan, Shilin Hong, and Hongxun Fu. 2021. "Study on the Prediction of Lane Change Intention of Intelligent Vehicles in the Network Environment" World Electric Vehicle Journal 12, no. 1: 27. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj12010027