Mathematical Model for Regular and Irregular PV Arrays with Improved Calculation Speed

 , and
, and
Abstract
:1. Introduction
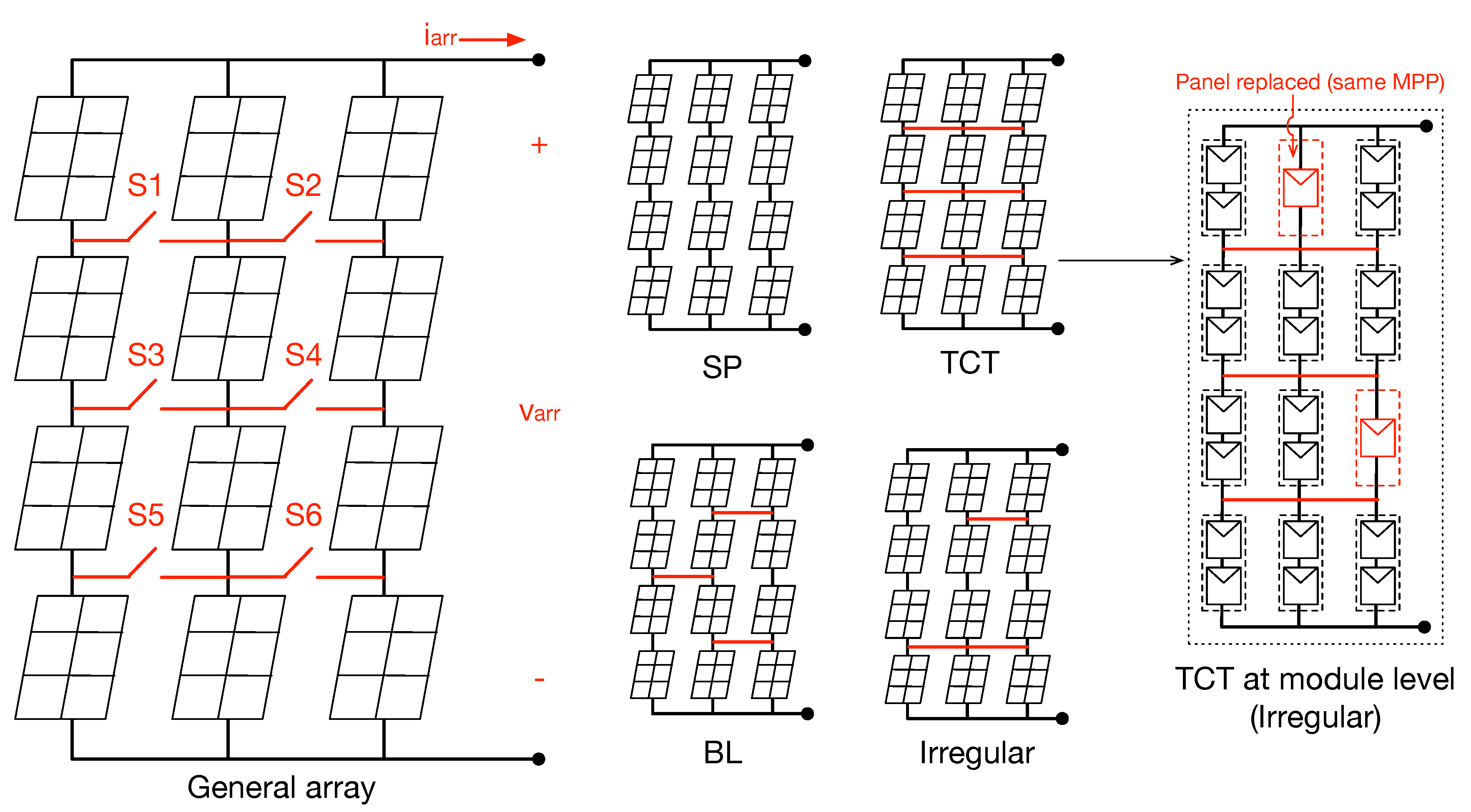
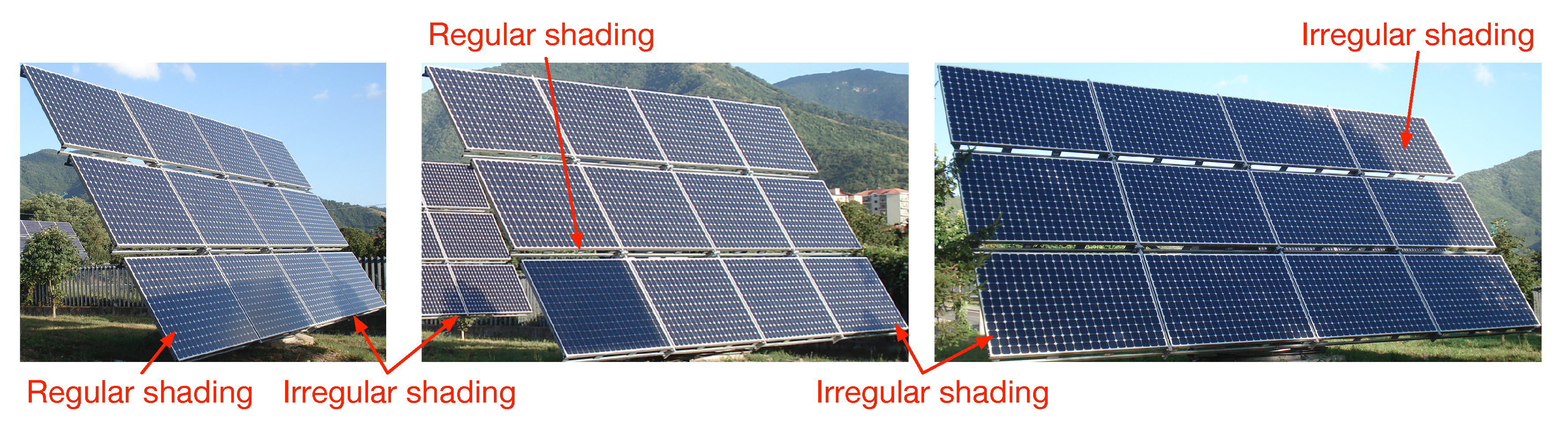
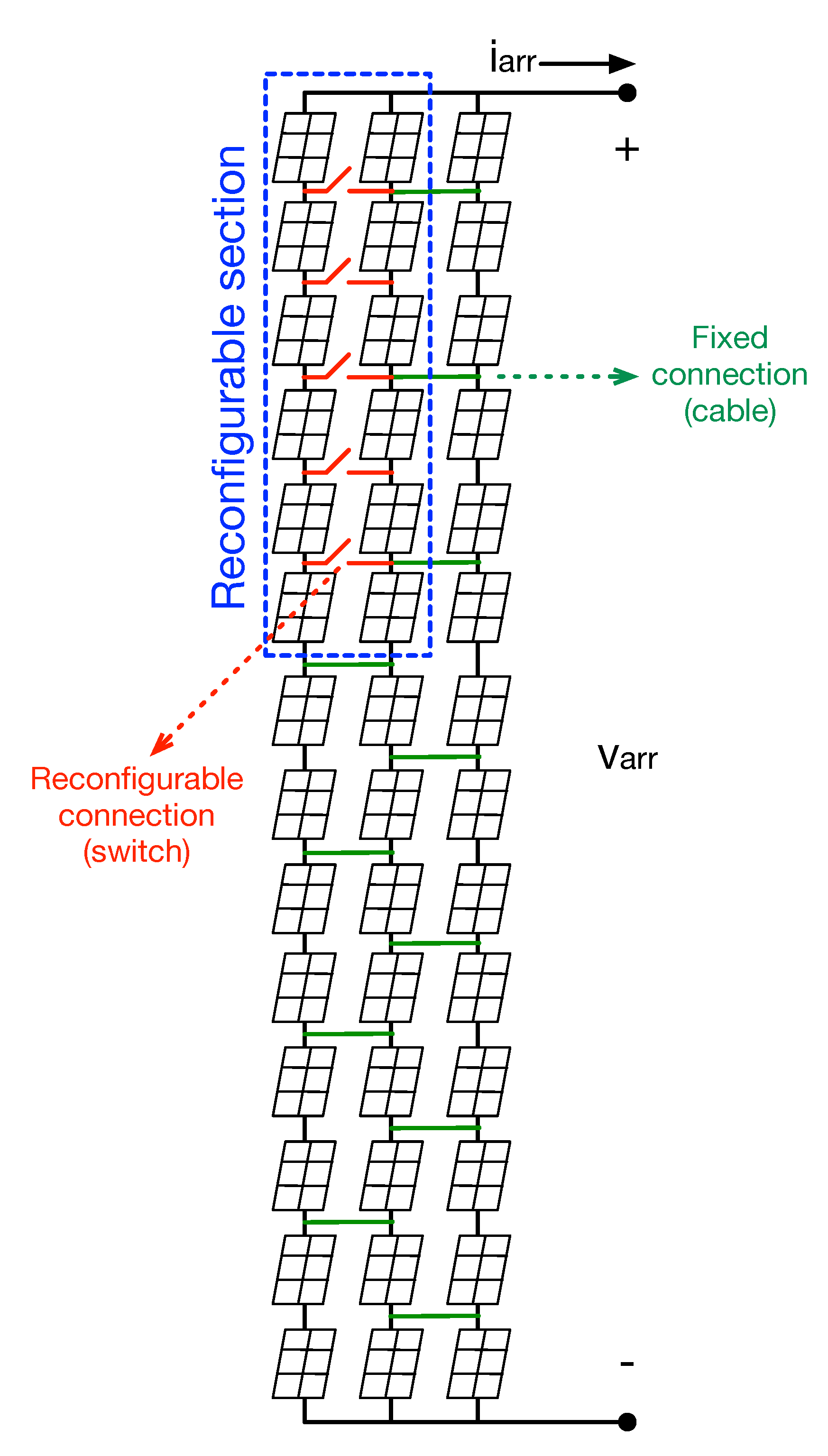
2. Mismatching Conditions and Internal Connections in PV Arrays
- Design the fixed connection of a PV array subjected to shading conditions.
- Reconfigure the PV array in real-time to adjust the best connections, depending on the shading pattern, which changes, depending on the sun position.
- Design a simulation platform to estimate the power production of any PV array with regular or irregular connections.
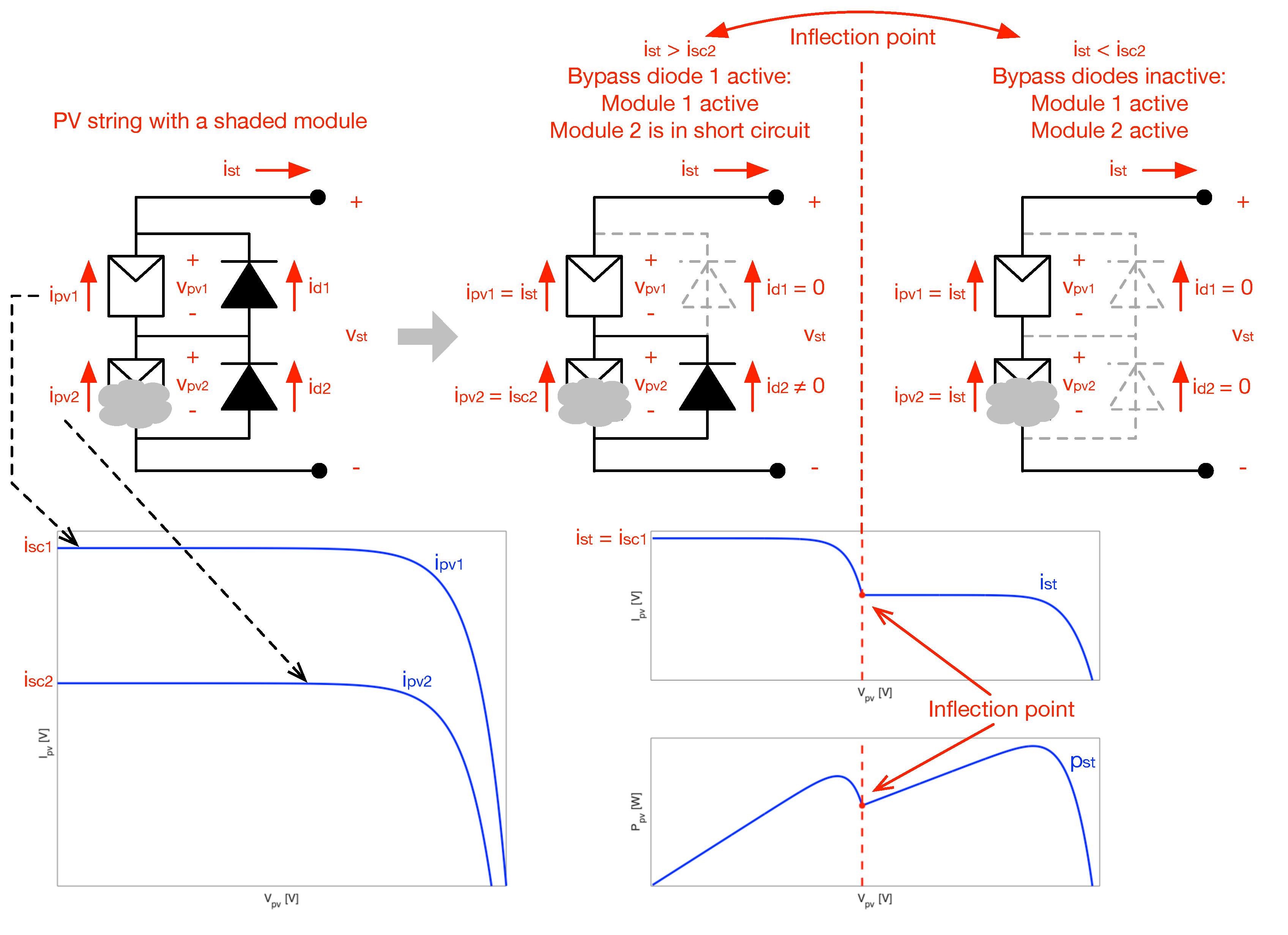
3. Inflection Point Concept
- If the string current is lower than the short-circuit current of both modules, i.e., , which means that both modules could produce the string current, i.e., , which imposes null current to both bypass diodes, i.e., . Therefore, both bypass diodes are inactive, and both modules are active to produce usable power. For the example of Figure 4, when , both of the modules are active, despite having different short-circuit currents.
- Instead, for the same irradiance and shading pattern, if the string current is higher than the short-circuit current of some modules, i.e., , this means that some modules are not able to produce the string current, i.e., and , which forces the activation of the corresponding bypass diodes, i.e., and . Therefore, some of the modules are inactive to produce usable power, i.e., in the example of Figure 4 the module 2 is short-circuit (inactive) when .
- Finally, if the string current is higher than the short-circuit current of all the modules, i.e., , this means that all of the modules are not able to produce the string current, which forces the activation of all the bypass diodes. Therefore, the PV array is inactive in producing usable power.
4. Inflection Points Calculation
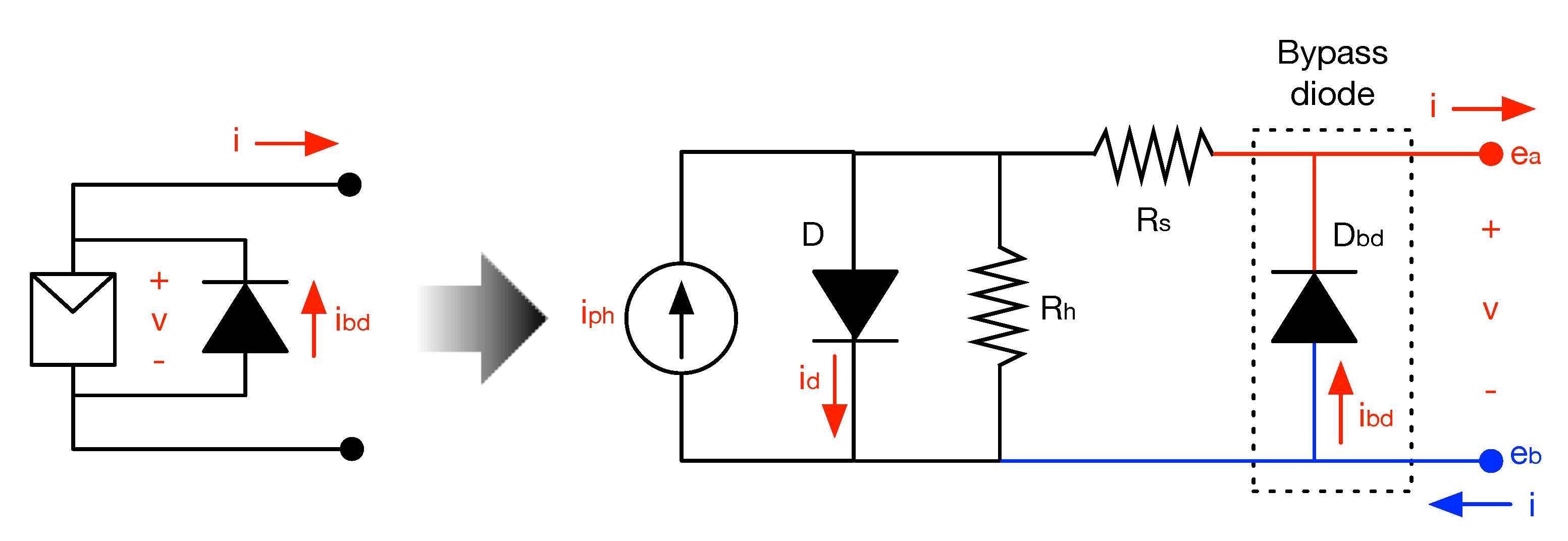
4.1. PV Module Representation
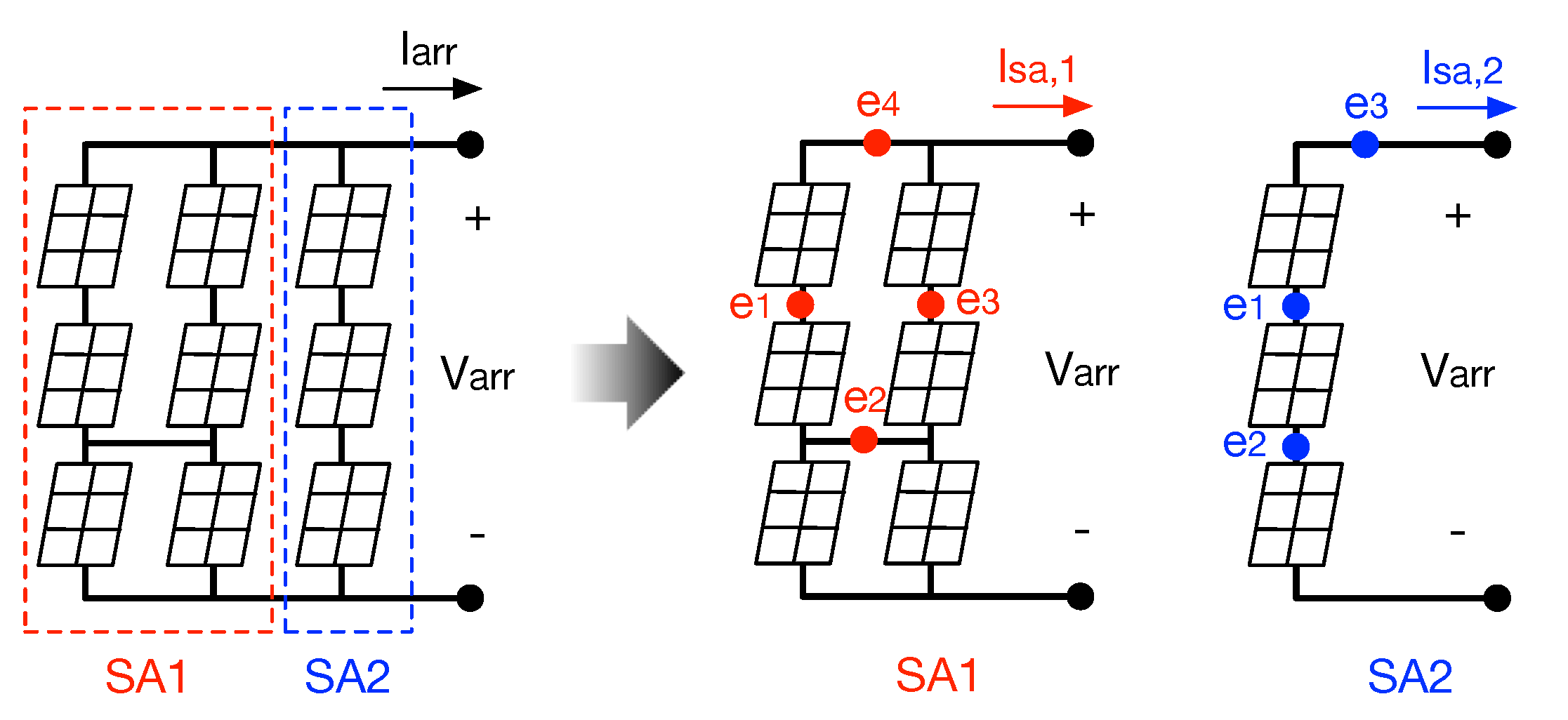
4.2. Matrix Representation a PV Array and Its Sub-Arrays
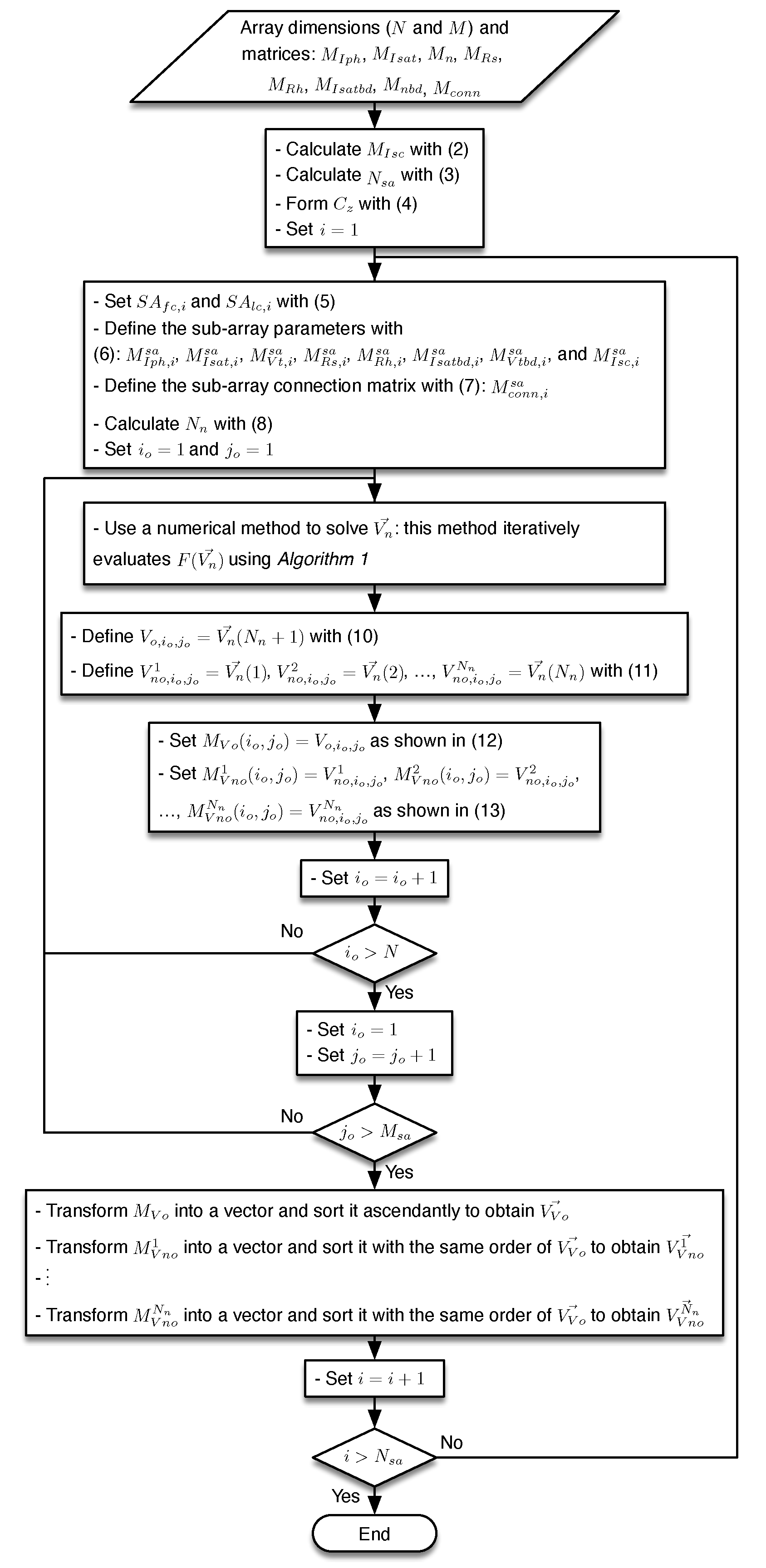
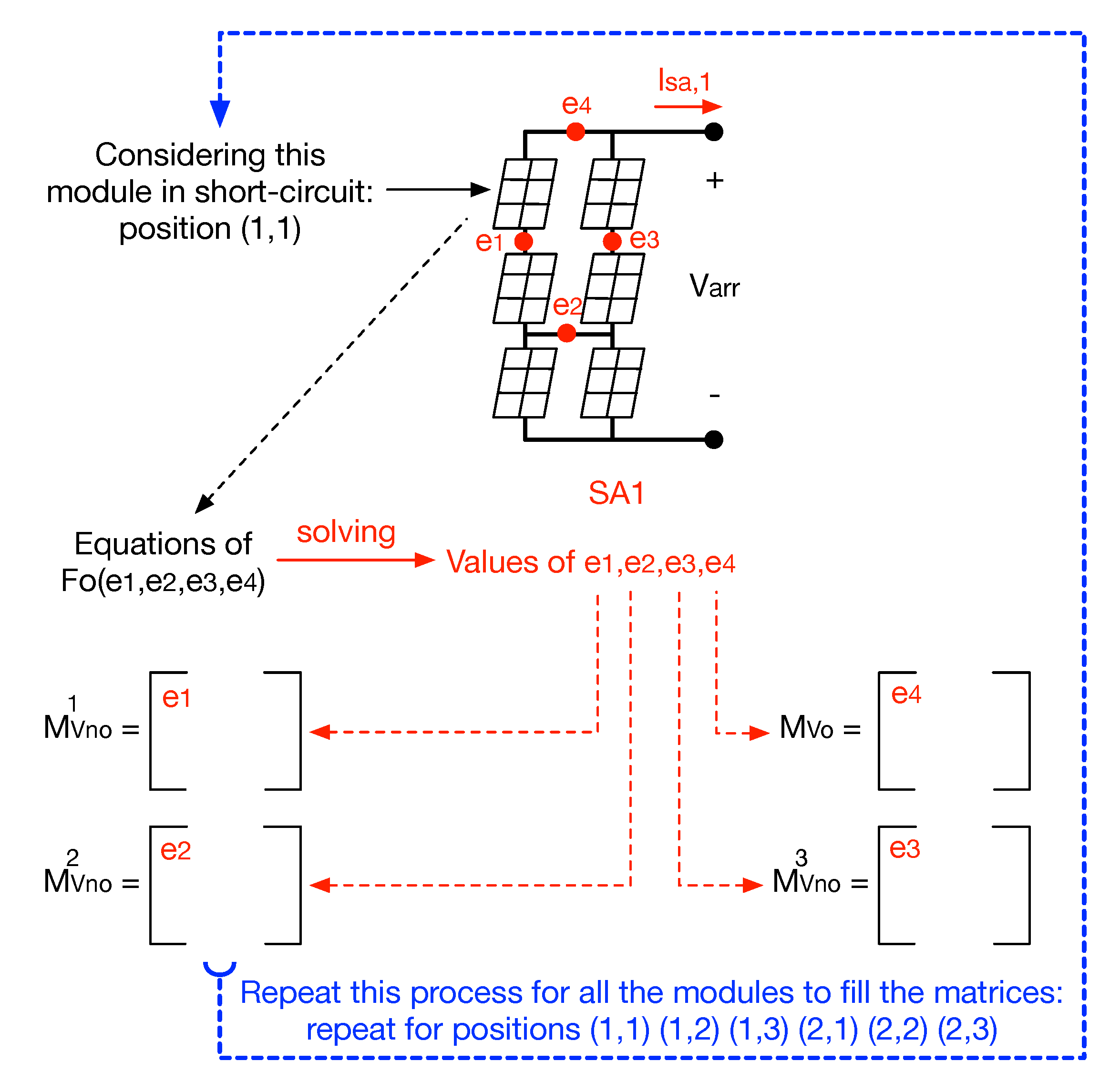
4.3. Inflection Voltage Calculation for a Sub-Array
| Algorithm 1 Calculation of |
| INPUT:, , , , , , , N, , sub-array parameters’ matrices OUTPUT: 1: Set 2: for columns to do 3: for rows to do 4: if OR then: 5: Identify and from 6: for modules in the node to do 7: Set and 8: Set and 9: if AND then: 10: Set 11: else 12: Calculate with (1) 13: end if 14: Calculate 15: Set , 16: if then: 17: 18: else: 19: Set and 20: end if 21: if AND then: 22: Set 23: else 24: Calculate with (1) 25: end if 26: Calculate 27: end for modules in the node 28: Set 29: end if 30: end for rows 31: end for columns 32: if then: 33: Set and 34: Calculate 35: else: 36: Set 37: Calculate 38: end if 39: Return |
4.4. Calculation Example
5. Sub-Array and Array Current Calculation Using Inflection Voltages
5.1. Sub-Array Current Calculation
| Algorithm 2 Calculation of |
| INPUT:, , , , , N, , sub-array parameters’ matrices OUTPUT: 1: Set 2: for columns to do 3: for rows to do 4: if OR then: Identify and from 5: for column to do 6: Set , 7: if then: 8: else: Set , and 9: end if 10: Calculate with (1) and 11: Set , 12: if then: 13: else: Set , . 14: end if 15: Calculate with (1) and 16: end for 17: Set 18: end if 19: end for rows 20: end for columns 21: Return |
5.2. Calculation of the Array Current
5.3. Calculation Example
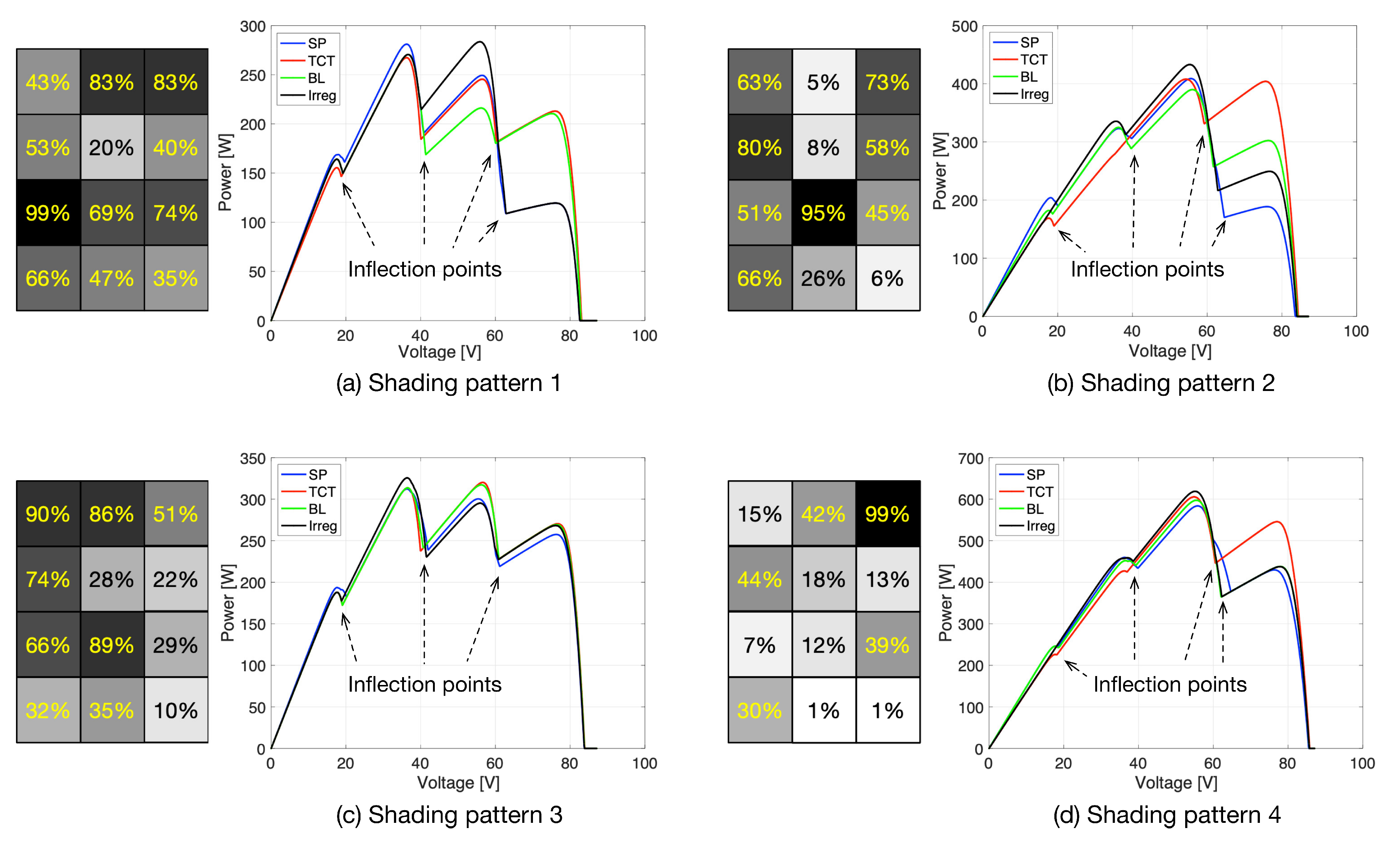
6. Performance Evaluation
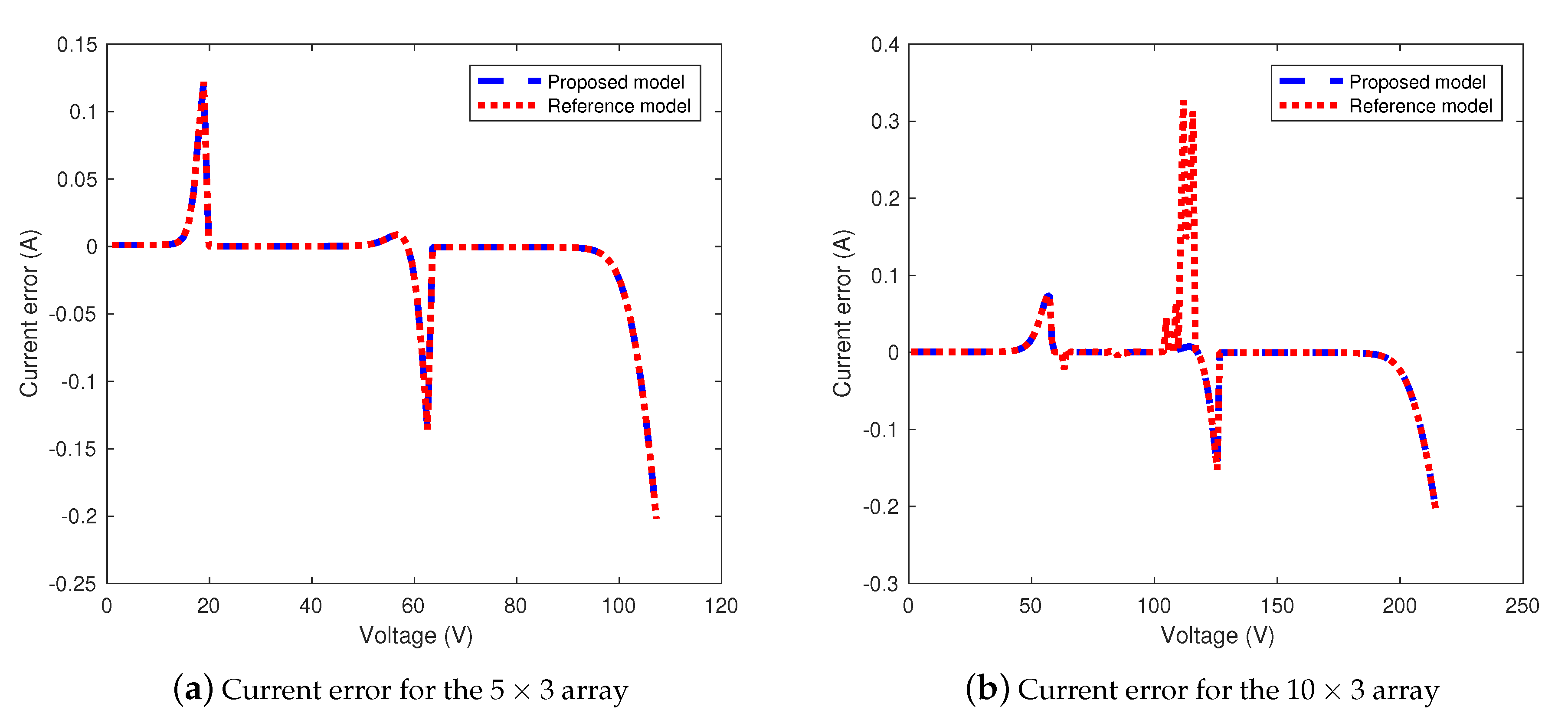
6.1. Errors in the Current Prediction
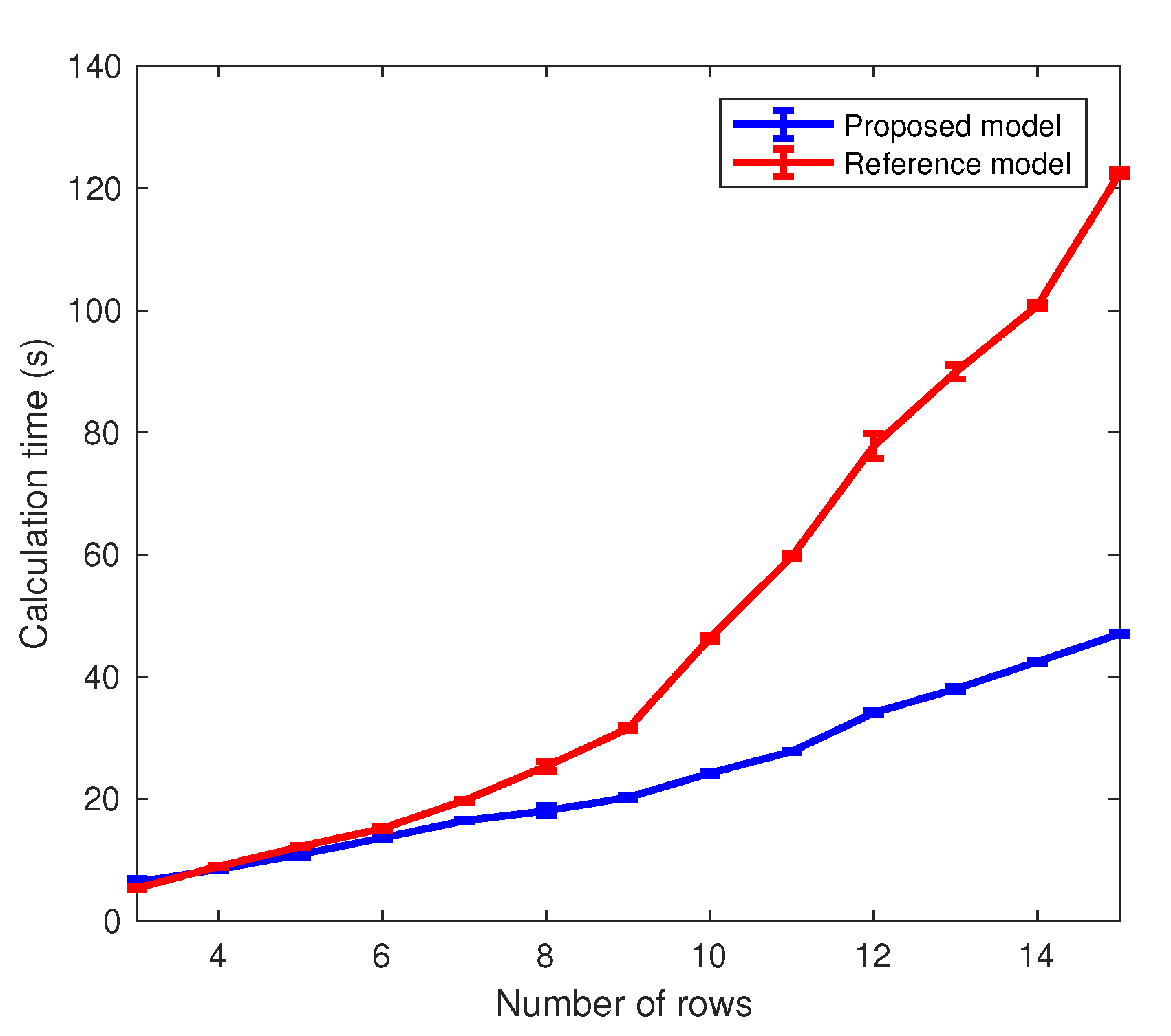
6.2. Calculation Time for Different Number of Rows
7. Application Example: Reconfiguration of Pv Arrays
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- International Energy Agency. Snapshot of Global PV Markets 2020; Technical Report; IEA: Paris, France, 2020. [Google Scholar]
- IRENA. IEA/IRENA Global Renewable Energy Policies and Measures Database; Technical Report; International Renewable Energy Agency: Abu Dhabi, UAE, 2020. [Google Scholar]
- Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. Photovoltaic Sources Modeling; John Wiley & Sons, Ltd.: Chichester, UK, 2017. [Google Scholar]
- Kermadi, M.; Chin, V.; Mekhilef, S.; Salam, Z. A fast and accurate generalized analytical approach for PV arrays modeling under partial shading conditions. Sol. Energy 2020, 208, 753–765. [Google Scholar] [CrossRef]
- Maria, M.; Yassine, C. Machine Learning Based Approaches for Modeling the Output Power of Photovoltaic Array in Real Outdoor Conditions. Electronics 2020, 9, 315. [Google Scholar] [CrossRef] [Green Version]
- Prince Winston, D.; Kumaravel, S.; Praveen Kumarc, B.; Devakirubakaran, S. Performance improvement of solar PV array topologies during various partial shading conditions. Sol. Energy 2020, 196, 228–242. [Google Scholar] [CrossRef]
- Premkumar, M.; Subramaniam, U.; Sudhakar, T.; Elavarasan, R.; Mihet-Popa, L. Evaluation of Mathematical Model to Characterize the Performance of Conventional and Hybrid PV Array Topologies under Static and Dynamic Shading Patterns. Energies 2020, 13, 3216. [Google Scholar] [CrossRef]
- Ayop, R.; Tan, W.C.; Mahmud, M.S.A.; Nasir, S.N.S.; Al-Hadhrami, T.; Bukar, A.L. A simplified and fast computing photovoltaic model for string simulation under partial shading condition. Sustain. Energy Technol. Assess. 2020, 42, 1–12. [Google Scholar]
- Bastidas, J.D.; Franco, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. A model of photovoltaic fields in mismatching conditions featuring an improved calculation speed. Electr. Power Syst. Res. 2013, 96, 81–90. [Google Scholar] [CrossRef]
- Petrone, G.; Ramos-Paja, C. Modeling of photovoltaic fields in mismatched conditions for energy yield evaluations. Electr. Power Syst. Res. 2011, 81, 1003–1013. [Google Scholar] [CrossRef]
- Pachauri, R.; Singh, R.; Gehlot, A.; Samakaria, R.; Choudhury, S. Experimental analysis to extract maximum power from PV array reconfiguration under partial shading conditions. Eng. Sci. Technol. Int. J. 2018, 22, 109–130. [Google Scholar] [CrossRef]
- Pendem, S.; Mikkili, S. Modeling, simulation and performance analysis of solar PV array configurations (Series, Series–Parallel and Honey-Comb) to extract maximum power under Partial Shading Conditions. Energy Rep. 2018, 4, 274–287. [Google Scholar] [CrossRef]
- Desai, A.A.; Mikkili, S. Modelling and analysis of PV configurations (alternate TCT-BL, total cross tied, series, series parallel, bridge linked and honey comb) to extract maximum power under partial shading conditions. CSEE J. Power Energy Syst. 2020, 1–16. [Google Scholar] [CrossRef]
- Bastidas-Rodriguez, J.; Trejos-Grisales, A.; Gonzalez, D.; Ramos-Paja, C.A.; Petrone, G.; Spagnuolo, G. General modeling procedure for photovoltaic arrays. Electr. Power Syst. Res. 2018, 155, 67–79. [Google Scholar] [CrossRef]
- Gonzalez, D.; Bastidas-Rodriguez, J.D.; Trejos-Grisales, A.; Ramos-Paja, C.A.; Petrone, G.; Spagnuolo, G. A Procedure for Modeling Photovoltaic Arrays under Any Configuration and Shading Conditions. Energies 2018, 11, 767. [Google Scholar] [CrossRef] [Green Version]
- Sai Krishna, G.; Moger, T. Reconfiguration strategies for reducing partial shading effects in photovoltaic arrays: State of the art. Sol. Energy 2019, 182, 429–452. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. Adaptive GA-based reconfiguration of photovoltaic array combating partial shading conditions. Neural Comput. Appl. 2018, 30, 1145–1170. [Google Scholar] [CrossRef]
- Zhao, Z.; Cheng, R.; Yan, B.; Zhang, J.; Zhang, Z.; Zhang, M. A dynamic particles MPPT method for photovoltaic systems under partial shading conditions. Energy Convers. Manag. 2020, 220, 1–15. [Google Scholar] [CrossRef]
- Pal, R.; Mukherjee, V. Metaheuristic based comparative MPPT methods for photovoltaic technology under partial shading condition. Energy 2020, 212, 1–23. [Google Scholar] [CrossRef]
- Velez-Sanchez, J.; Bastidas-Rodriguez, J.D.; Ramos-Paja, C.A.; Gonzalez, D.; Trejos-Grisales, A. A Non-Invasive Procedure for Estimating the Exponential Model Parameters of Bypass Diodes in Photovoltaic Modules. Energies 2019, 12, 303. [Google Scholar] [CrossRef] [Green Version]
- Tian, H.; Mancilla-David, F.; Ellis, K.; Muljadi, E.; Jenkins, P. Determination of the optimal configuration for a photovoltaic array depending on the shading condition. Sol. Energy 2013, 95, 1–12. [Google Scholar] [CrossRef]
- Saiprakash, C.; Mohapatra, A.; Nayak, B.; Ghatak, S. Analysis of partial shading effect on energy output of different solar PV array configurations. Mater. Today Proc. 2020. [Google Scholar] [CrossRef]
- Pachauri, R. Impact of Partial Shading on Various PV Array Configurations and Different Modeling Approaches: A Comprehensive Review. IEEE Power Energy Soc. Sect. 2020, 8, 181375–181403. [Google Scholar] [CrossRef]
- Accarino, J.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. Symbolic algebra for the calculation of the series and parallel resistances in PV module model. In Proceedings of the IEEE 2013 International Conference on Clean Electrical Power (ICCEP), Alghero, Italy, 11–13 June 2013; pp. 62–66. [Google Scholar]
- Cardenas, A.A.; Carrasco, M.; Mancilla-David, F.; Street, A.; Cardenas, R. Experimental Parameter Extraction in the Single-Diode Photovoltaic Model via a Reduced-Space Search. IEEE Trans. Ind. Electron. 2017, 64, 1468–1476. [Google Scholar] [CrossRef]
- Velasco-Quesada, G.; Guinjoan-Gispert, F.; Pique-Lopez, R.; Roman-Lumbreras, M.; Conesa-Roca, A. Electrical PV Array Reconfiguration Strategy for Energy Extraction Improvement in Grid-Connected PV Systems. IEEE Trans. Ind. Electron. 2009, 56, 4319–4331. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rows | Proposed Model | Reference Model | ||
|---|---|---|---|---|
| Average (s) | Std (s) | Average (s) | Std (s) | |
| 3 | 6.396 | 0.509 | 5.362 | 0.169 |
| 4 | 8.462 | 0.079 | 8.934 | 0.166 |
| 5 | 10.893 | 0.463 | 12.190 | 0.157 |
| 6 | 13.616 | 0.336 | 15.160 | 0.296 |
| 7 | 16.413 | 0.180 | 19.735 | 0.199 |
| 8 | 18.025 | 0.792 | 25.353 | 0.767 |
| 9 | 20.232 | 0.229 | 31.533 | 0.357 |
| 10 | 24.212 | 0.307 | 46.348 | 0.456 |
| 11 | 27.771 | 0.121 | 59.698 | 0.352 |
| 12 | 34.096 | 0.294 | 77.808 | 2.059 |
| 13 | 38.008 | 0.310 | 89.932 | 1.159 |
| 14 | 42.471 | 0.224 | 100.773 | 0.531 |
| 15 | 46.995 | 0.214 | 122.431 | 0.555 |
| Shading Profile 1 | Shading Profile 2 | Shading Profile 2 | |||
|---|---|---|---|---|---|
| 5.1337 | 5.1337 | 5.1337 | 3.5936 | 5.1337 | 5.1337 |
| 3.5936 | 5.1337 | 3.5936 | 5.1337 | 3.5936 | 5.1337 |
| 3.5936 | 3.5936 | 1.5401 | 1.5401 | 3.5936 | 3.5936 |
| 1.5401 | 3.5936 | 5.1337 | 3.5936 | 1.5401 | 1.5401 |
| 1.5401 | 1.5401 | 1.5401 | 5.1337 | 1.5401 | 5.1337 |
| 5.1337 | 0.5134 | 5.1337 | 1.5401 | 5.1337 | 5.1337 |
| Shading Profile | Proposed Model | Reference Model |
|---|---|---|
| 1 | 18.2180 | 38.0085 |
| 2 | 19.1983 | 34.7788 |
| 3 | 17.9341 | 38.2907 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trejos-Grisales, L.A.; Bastidas-Rodríguez, J.D.; Ramos-Paja, C.A. Mathematical Model for Regular and Irregular PV Arrays with Improved Calculation Speed. Sustainability 2020, 12, 10684. https://0-doi-org.brum.beds.ac.uk/10.3390/su122410684
Trejos-Grisales LA, Bastidas-Rodríguez JD, Ramos-Paja CA. Mathematical Model for Regular and Irregular PV Arrays with Improved Calculation Speed. Sustainability. 2020; 12(24):10684. https://0-doi-org.brum.beds.ac.uk/10.3390/su122410684
Chicago/Turabian StyleTrejos-Grisales, Luz Adriana, Juan David Bastidas-Rodríguez, and Carlos Andrés Ramos-Paja. 2020. "Mathematical Model for Regular and Irregular PV Arrays with Improved Calculation Speed" Sustainability 12, no. 24: 10684. https://0-doi-org.brum.beds.ac.uk/10.3390/su122410684