
The Role of Fast Frequency Response of Energy Storage Systems and Renewables for Ensuring Frequency Stability in Future Low-Inertia Power Systems

 , ,
, ,
Abstract
:1. Introduction
- Should BESSs operate with enough reserves to provide FFR?
- Should RGTs operate in de-loaded mode to provide FFR?
- How do investment decisions change depending on who offers FFR?
- How do these answers change for different levels of inertia in the power system?
- How is the location of reserves impacted?
- How does the spatial inertia distribution in the network impact the investment decisions as well as the FFR providers?
- A -security-constraint GEP model that includes a system-wide frequency constraint to ensure frequency stability during major power imbalances (uninodal model). The model considers that BESSs and RGTs are able to support frequency stability with FFR by keeping some power reserves.
- A -security-constraint GEP model that includes a set of frequency constraints for ensuring frequency stability. This model also considers that BESSs and RGTs can support frequency stability with FFR.
2. Generation Expansion Planning Model Considering Frequency Stability Constraints
2.1. Theoretical Background
2.1.1. System Dynamic Right after the Occurrence of a Contingency
2.1.2. FFR Capability of Renewable Energies and Storage
2.2. GEP Model
2.2.1. System-Wide Frequency Stability Constraint
2.2.2. Zone-Specific Frequency Stability Constraints
2.2.3. Modeling of Reserves and FFR from Renewable Technologies and Batteries
3. Case Study
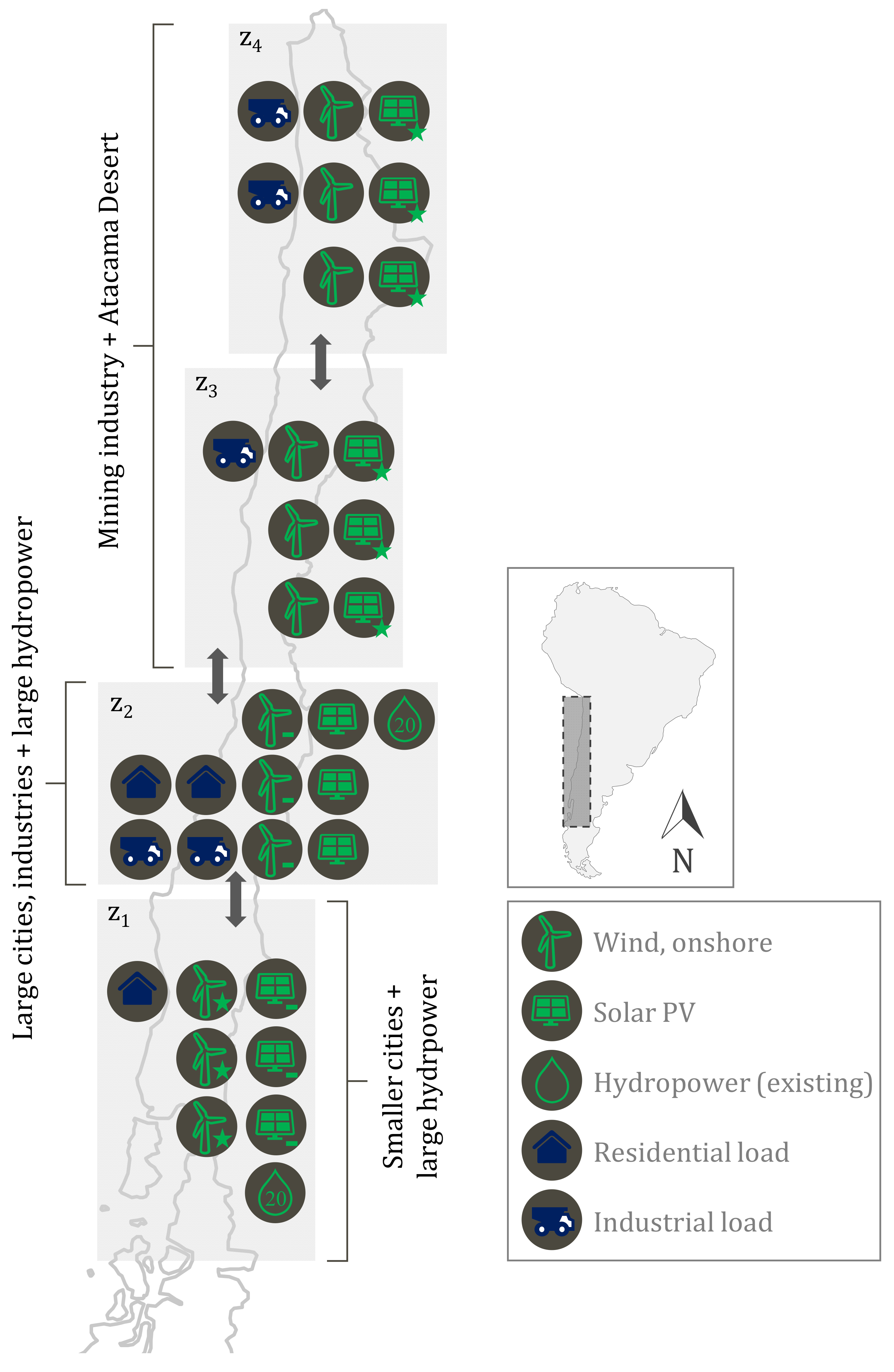
3.1. Description of the Power System
3.2. Input Data
3.3. Defines Cases and Resulting Scenarios
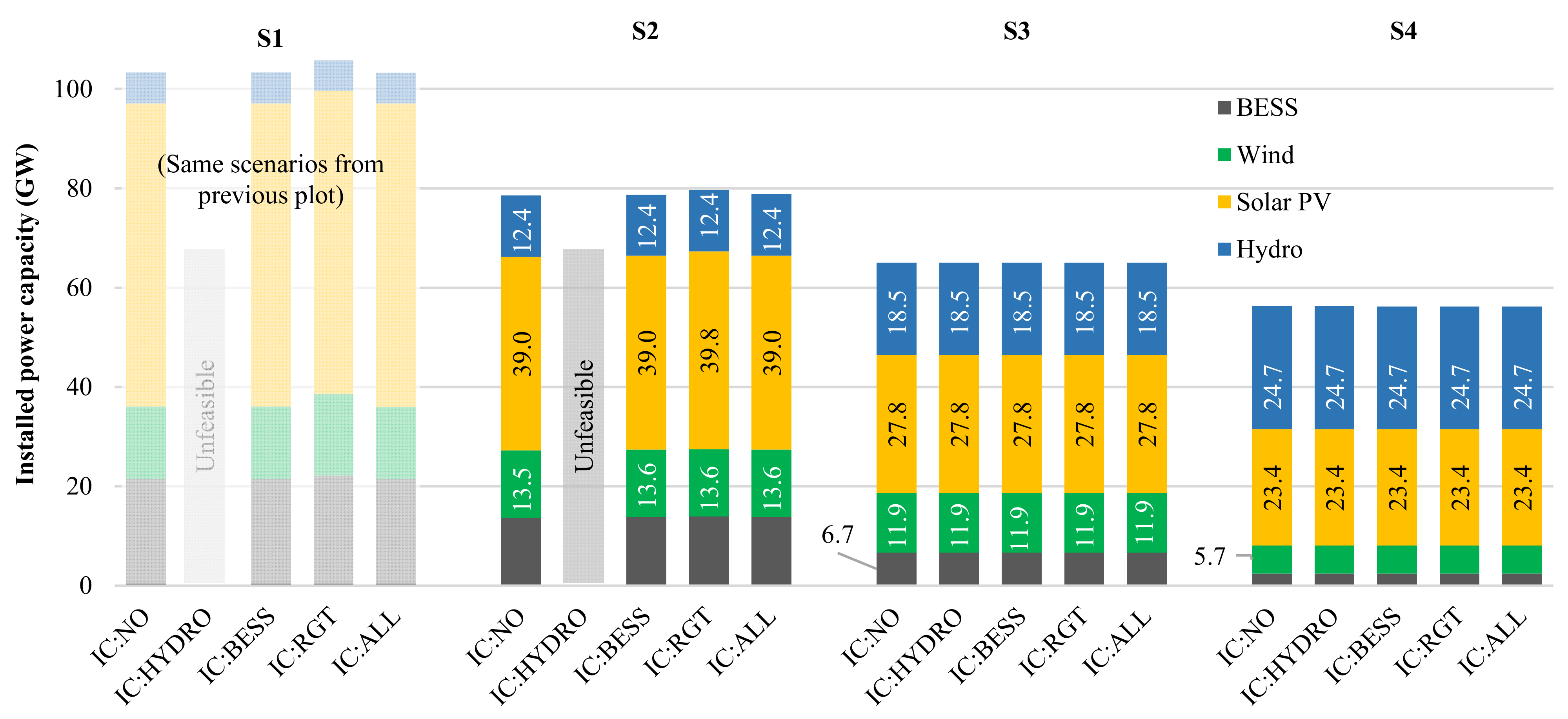
- Level of available inertia: Regarding possible future levels of system inertia, we built four scenarios by varying the installed capacity of hydropower (denoted S1 to S4). We assumed that according to the decarbonization plan in Chile, rotating masses from fossil generation will not be available in the target year. The first scenario (S1) represents the current situation of hydropower capacities (6 GW) [39]. In each of the following scenarios (S2, S3, S4), we successively increased the installed capacity by 6 GW, resulting in 24 GW for the last scenario (S4). These values may be realized by incorporating new hydropower projects, re-powering and up-powering of existing installations, and new pumped hydro installations. Regardless of the actual hydropower park in the year 2050, these scenarios are helpful to understand the sensitivity of our results in systems with different levels of inertia which, in practice, could also be provided by other technologies, e.g., flywheels.
- System-wide versus zone-specific-constraints: We run the GEP model for cases with a system-wide f-constraint (FS-U) and a set of zone-specific f-constraints (FS-M) for ensuring system frequency stability. Both cases are compared to the case without frequency stability constraints (NS). For the system-wide f-constraint, we consider the loss of the largest generation unit, which is a hydropower unit of 0.7 GW. This sudden generation trip would lead to a power mismatch of 0.7 GW. In the zone-specific -constraints, we consider the loss of the largest generation unit in each zone (see Table A1, Table A2, Table A3 and Table A4 and Figure A1 in the Appendix A for further details). For zones 1 and 2, we considered large hydro units (0.7 and 0.6 GW, respectively), and for zones 3 and 4, a large renewable power park (0.1 GW for each). Note that, in each case, only the trip of one generating unit at a time is considered.
- What technology provides reserves: Regarding the technology that may contribute with FFR, we considered the following cases: (i) neither BESSs nor RGTs contribute with FFR (IC: HYDRO), in which case the frequency must be maintained solely by hydropower plants; (ii) only BESSs and hydropower plants contribute with FFR (IC: BESS); (iii) only renewable generators and hydropower plants contribute with FFR (IC: RGT); and (iv) BESSs, RGTs, and hydropower plants contribute with FFR (IC: ALL).
4. Results
4.1. Impact of Modeling Frequency Constraints on Investment Decisions
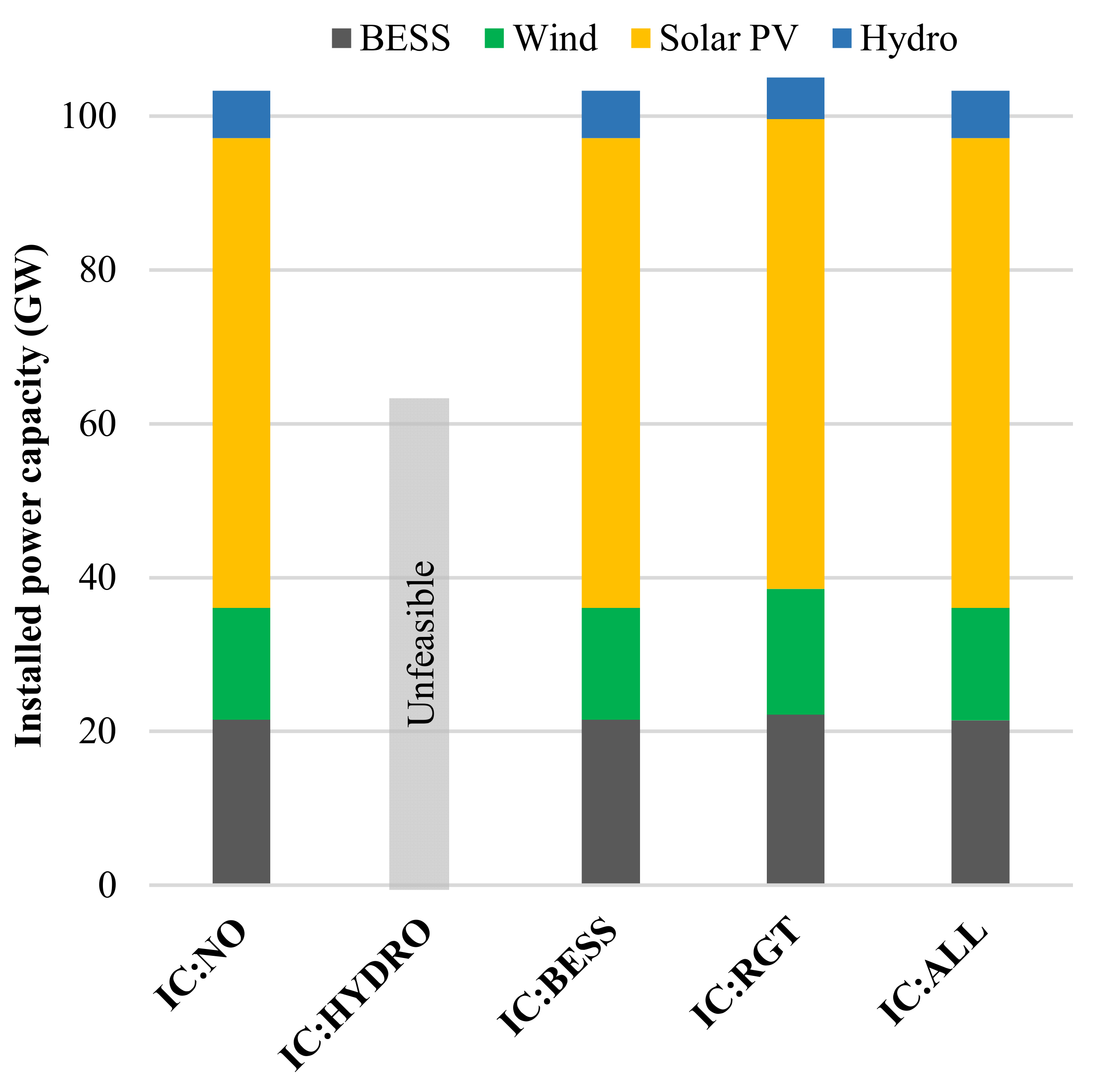
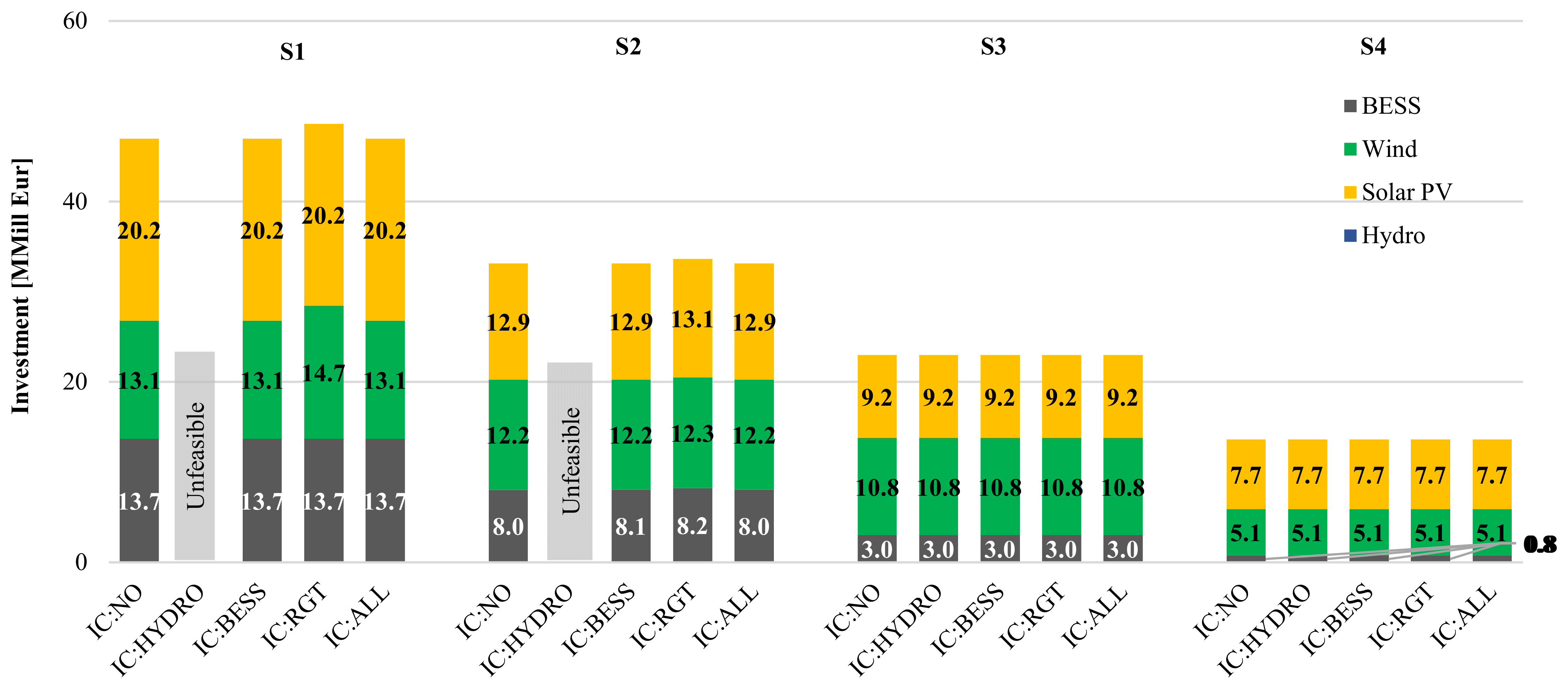
- Relying solely on hydropower plants to meet the system frequency stability requirements is not sufficient (IC: HYDRO). Here, the planning model is unfeasible. To some extent, this is to be expected, as the frequency requirements are similar to those in the system today, but most of the technologies with rotating masses will have been phased out. If not replaced with new technologies, the system will simply not meet the stability requirements.
- Exclusively using renewables to contribute with FFR (IC: RGT) is feasible but results in 2–3% larger power capacity investments. The possibility to assure frequency stability only with renewables is an interesting finding, especially if storage technologies happen not to evolve as cheaply as the projections insinuate today. In this context, the ability to offer FFR by RGTs based on adding control loop to the converter controller might be an alternative.
- When only BESSs aid in FFR provision (IC: BESS), the resulting investment sizes are very similar to the case in which FFR is not modeled (IC: NO). The same holds for the case in which all technologies participate in FFR provision (IC: ALL). This happens due to the topology of the resulting system: solar PV, being the most cost-effective solution (given its cheap costs and Chile’s excellent solar resources), is massively deployed. This, in turn, triggers large investments in batteries for shifting energy from day to night (energy arbitrage). In addition, the inertia requirements (0.7 GW) seem rather small next to the over 20 and 6 GW of power capacity from batteries and hydropower plants, respectively. From these capacities, some might always be readily available to meet other services, such as FFR.
- In S2 (double as much available inertia as S1), when hydropower is the only provider of inertial response (IC: HYDRO), the projected system is unable to comply with the frequency stability constraints without help from BESSs or RGTs. Again, investments are slightly higher if renewables are the only technology allowed to provide FFR (IC: RGT). Moreover, similarly to S1, if batteries (IC: BESS) or all technologies (IC: ALL) participate, the investment recommendations are very similar to the case in which no FFR is prescribed (IC: NO).
- In scenarios S3 and S4, planning with the frequency stability constraints has negligible effects on the optimal solution. Here, the available inertia is large enough to meet the system’s requirements without the need for further action.
4.2. Impact of Zone-Specific Frequency Constraints on Investment Decisions
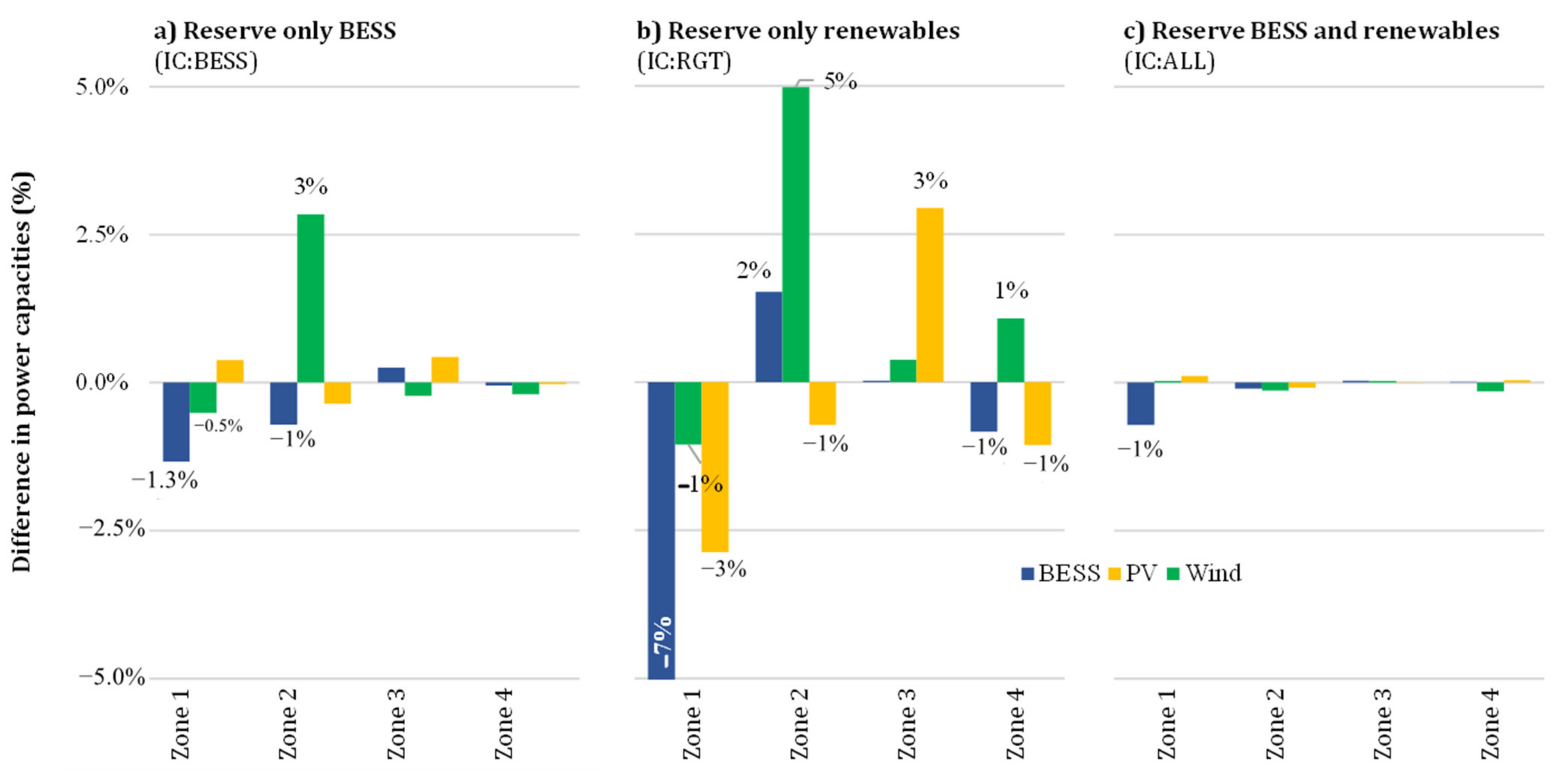
- There is a measurable relocation of investments. This holds for all technologies, and under all scenarios. In other words, if the spatial inertia distribution in the network is uneven, zone-specific inertia modeling should be preferred. The difference in investment sizes is ranged between −7% and 5%.
- When comparing the three panels (a, b, c), it becomes clear how the largest difference occurs when only renewables provide FFR. The other extreme is when all technologies participate in reserve provision (panel c), where the relocation of investments is minimum.
- The largest relocations occur for zone 1 and zone 2. Zone 1 generally shows lower investments and zone 2 higher investments, when using a zone-specific approach. The resulting investments in zones 3 and 4 are more stable.
- When planning with zone-specific -constraints, batteries are generally down-sized and compensated by larger wind farms.
- Finally, when analyzing the (system) total investment sizes (not directly shown here, but computable when summing all the differences), there is no significant difference between the two ways of modeling the frequency constraint. This also holds for total costs.
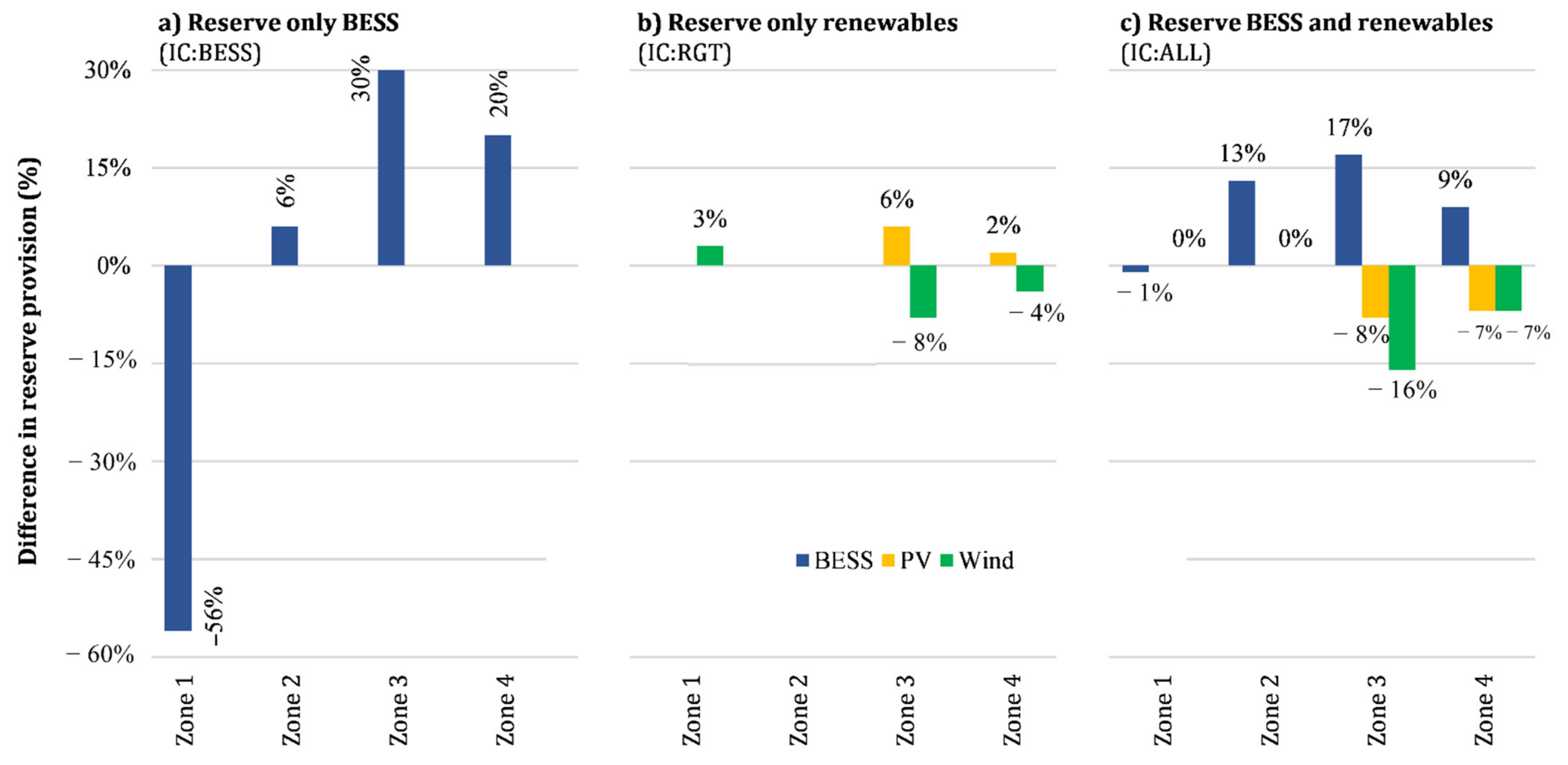
- There is an impact on the location of the reserve provider. This impact occurs for all scenarios and zones and ranges between −56% and 30% (see Figure 5).
- The reserve providers suffer from important relocations. The operational difference is particularly large when only batteries offer FFR (panel a), with an average of 30%. On the other hand, when only renewables offer reserves (panel b), that relocation is minimum. The latter can be explained by the slack that the renewable power plants have, given their over-investments which results in energy curtailment when they are the only reserve providers (recall Figure 2).
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description |
|---|---|
| Time steps | |
| Renewable power plants | |
| Storage technologies | |
| H | Hydropower plants |
| Photovoltaic plants | |
| W | Wind plants |
| Zone “i” |
| Name | Units | Description |
|---|---|---|
| | MW | Power charged to or discharged from storage s in zone z at time t |
| MW | Contingency reserve from storage s in zone z at time t | |
| MW | Contingency reserve from photovoltaic in zone z at time t | |
| MW | Contingency reserve from wind in zone z at time t | |
| MW | Contingency reserve from renewables in zone z at time t | |
| seg | inertia of the system | |
| p.u. | Power imbalance | |
| p.u. | Power contributions of RGTs | |
| p.u. | Power contributions of BESSs | |
| MW | Import power per zone z at time t in case of contingency | |
| MW | Export power per zone z at time t in case of contingency | |
| MW | Offered energy from renewables in zone z at time t | |
| MVA | Nominal power of unit t | |
| MVA | Common system base | |
| MWh | Stored energy of storage s in zone z at time t |
| Name | Units | Description |
|---|---|---|
| MW | Installed power capacity of renewable technology r in zone z | |
| MW | Installed power capacity of transmission lines l | |
| MW | Installed power capacity (discharging, charging) of storage s in zone z | |
| MWh | Installed energy capacity of storage s in zone z |
| Name | Units | Description |
|---|---|---|
| % | Profile of renewable source r in zone z at time t | |
| ROCOF | Hz/seg | Rate of change of frequency |
| Hz | Nominal frequency of the system | |
| seg | Inertia constant of unit i | |
| seg | Amount of inertia for each zone | |
| MW | Equivalent power contingency |

References
- REN21. Renewables 2018 Global Status Report; REN21: Paris, France, 2018. [Google Scholar]
- Bloom, A.; Helman, U.; Holttinen, H.; Summers, K.; Bakke, J.; Brinkman, G.; Lopez, A. It’s Indisputable: Five Facts about Planning and Operating Modern Power Systems. IEEE Power Energy Mag. 2017, 15, 22–30. [Google Scholar] [CrossRef]
- Milano, F.; Dorfler, F.; Hug, G.; Hill, D.J.; Verbic, G. Foundations and Challenges of Low-Inertia Systems (Invited Paper). In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018. [Google Scholar]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.-M.; Hannegan, B. Achieving a 100% Renewable Grid: Operating Electric Power Systems with Extremely High Levels of Variable Renewable Energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Ulbig, A.; Borsche, T.; Andersson, G. Impact of Low Rotational Inertia on Power System Stability and Operation. IFAC Proc. Vol. 2014, 47, 7290–7297. [Google Scholar] [CrossRef] [Green Version]
- IEEE Power & Enery Society. Impact of Inverter Based Generation on Bulk Power System Dynamics and Short-Circuit Performance—PES-TR68; IEEE Power & Enery Society: Piscataway, NJ, USA, 2018; p. 63. [Google Scholar]
- Lew, D.; Brinkman, G.; Kumar, N.; Lefton, S.; Jordan, G.; Venkataraman, S. Finding Flexibility: Cycling the Conventional Fleet. IEEE Power Energy Mag. 2013, 11, 20–32. [Google Scholar] [CrossRef]
- Etxegarai, A.; Eguia, P.; Torres, E.; Iturregi, A.; Valverde, V. Review of grid connection requirements for generation assets in weak power grids. Renew. Sustain. Energy Rev. 2015, 41, 1501–1514. [Google Scholar] [CrossRef]
- Rahmann, C.; Vittal, V.; Ascui, J.; Haas, J. Mitigation Control against Partial Shading Effects in Large-Scale PV Power Plants. IEEE Trans. Sustain. Energy 2015, 7, 173–180. [Google Scholar] [CrossRef]
- Rahmann, C.; Mayol, C.; Haas, J. Dynamic control strategy in partially-shaded photovoltaic power plants for improving the frequency of the electricity system. J. Clean. Prod. 2018, 202, 109–119. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Haas, J.; Cebulla, F.; Cao, K.; Nowak, W.; Palma-Behnke, R.; Rahmann, C.; Mancarella, P. Challenges and trends of energy storage expansion planning for flexibility provision in low-carbon power systems—A review. Renew. Sustain. Energy Rev. 2017, 80, 603–619. [Google Scholar] [CrossRef] [Green Version]
- Cebulla, F.; Haas, J.; Eichman, J.; Nowak, W.; Mancarella, P. How much electrical energy storage do we need? A synthesis for the U.S., Europe, and Germany. J. Clean. Prod. 2018, 181, 449–459. [Google Scholar] [CrossRef]
- Zerrahn, A.; Schill, W.-P. Long-run power storage requirements for high shares of renewables: Review and a new model. Renew. Sustain. Energy Rev. 2017, 79, 1518–1534. [Google Scholar] [CrossRef]
- Hart, E.K.; Jacobson, M.Z. A Monte Carlo approach to generator portfolio planning and carbon emissions assessments of systems with large penetrations of variable renewables. Renew. Energy 2011, 36, 2278–2286. [Google Scholar] [CrossRef]
- De Sisternes, F.J.; Jenkins, J.D.; Botterud, A. The value of energy storage in decarbonizing the electricity sector. Appl. Energy 2016, 175, 368–379. [Google Scholar] [CrossRef] [Green Version]
- Genoese, F.; Genoese, M. Assessing the value of storage in a future energy system with a high share of renewable electricity generation an agent-based simulation approach with integrated optimization methods. Energy Syst. 2014, 5, 19–44. [Google Scholar] [CrossRef]
- Carrion, M.; Dvorkin, Y.; Pandzic, H. Primary Frequency Response in Capacity Expansion with Energy Storage. IEEE Trans. Power Syst. 2018, 33, 1824–1835. [Google Scholar] [CrossRef]
- Haas, J.; Cebulla, F.; Nowak, W.; Rahmann, C.; Palma-Behnke, R. A multi-service approach for planning the optimal mix of energy storage technologies in a fully-renewable power supply. Energy Convers. Manag. 2018, 178, 355–368. [Google Scholar] [CrossRef]
- Inzunza, A.; Moreno, R.; Bernales, A.; Rudnick, H. CVaR Constrained Planning of Renewable Generation with Consideration of System Inertial Response, Reserve Services and Demand Participation. Energy Econ. 2016, 59, 104–117. [Google Scholar] [CrossRef]
- Komasatid, K.; Jiriwibhakorn, S. Flexibility and Frequency Security Enhancement to Generation Expansion Planning Framework. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 762–767. [Google Scholar]
- Chavez, H.; Baldick, R.; Sharma, S. Governor Rate-Constrained OPF for Primary Frequency Control Adequacy. IEEE Trans. Power Syst. 2014, 29, 1473–1480. [Google Scholar] [CrossRef]
- Haas, J.; Nowak, W.; Palma-Behnke, R. Multi-objective planning of energy storage technologies for a fully renewable system: Implications for the main stakeholders in Chile. Energy Policy 2019, 126, 494–506. [Google Scholar] [CrossRef]
- GAMS Development Corp. GAMS-Cutting Edge Modeling; GAMS Development Corp.: Fairfax, VA, USA, 2018. [Google Scholar]
- IBM. IBM ILOG CPLEX Optimization Studio; IBM: Armonk, NY, USA, 2018. [Google Scholar]
- Ahmadi, H.; Ghasemi, H. Security-Constrained Unit Commitment with Linearized System Frequency Limit Constraints. IEEE Trans. Power Syst. 2014, 29, 1536–1545. [Google Scholar] [CrossRef]
- Egido, I.; Fernandez-Bernal, F.; Centeno, P.; Rouco, L. Maximum Frequency Deviation Calculation in Small Isolated Power Systems. IEEE Trans. Power Syst. 2009, 24, 1731–1738. [Google Scholar] [CrossRef]
- Rahmann, C.; Chamas, S.I.; Alvarez, R.; Chavez, H.; Ortiz-Villalba, D.; Shklyarskiy, Y. Methodological Approach for Defining Frequency Related Grid Requirements in Low-Carbon Power Systems. IEEE Access 2020, 8, 161929–161942. [Google Scholar] [CrossRef]
- Bomer, J.; Burges, K.; Nabe, C.; Poller, M. All Island TSO Facilitation of Renewables Studies; EirGrid: Dublin, Ireland, 2010; pp. 1–107. [Google Scholar]
- Hung, W.; Ray, G.; Stein, G. Frequency Changes during Large Disturbances WG; National Grid plc: London, UK, 2010. [Google Scholar]
- Ahmadyar, A.S.; Riaz, S.; Verbic, G.; Riesz, J.; Chapman, A. Assessment of minimum inertia requirement for system frequency stability. In Proceedings of the 2016 IEEE International Conference on Power System Technology (POWERCON), Wollongong, Australia, 28 September–1 October 2016; pp. 1–6. [Google Scholar]
- Molina, A.; Falvey, M.; Rondanelli, R. A solar radiation database for Chile. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Department of Geophysics, University of Chile and Ministry of Energy of Chile. Explorador de Energía Solar (Solar Energy Explorer). 2012. Available online: http://walker.dgf.uchile.cl/Explorador/Solar2/ (accessed on 25 August 2015).
- Child, M.; Breyer, C.; Bogdanov, D.; Fell, H.-J. The role of storage technologies for the transition to a 100% renewable energy system in Ukraine. Energy Proc. 2017, 135, 410–423. [Google Scholar] [CrossRef]
- Kilickaplan, A.; Bogdanov, D.; Peker, O.; Caldera, U.; Aghahosseini, A.; Breyer, C. An energy transition pathway for Turkey to achieve 100% renewable energy powered electricity, desalination and non-energetic industrial gas demand sectors by 2050. Sol. Energy 2017, 158, 218–235. [Google Scholar] [CrossRef]
- Breyer, C.; Afanasyeva, S.; Brakemeier, D.; Engelhard, M.; Giuliano, S.; Puppe, M.; Schenk, H.; Hirsch, T.; Moser, M. Assessment of mid-term growth assumptions and learning rates for comparative studies of CSP and hybrid PV-battery power plants. AIP Conf. Proc. 2017, 1850. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, R.; Moser, A.; Rahmann, C.A. Novel Methodology for Selecting Representative Operating Points for the TNEP. IEEE Trans. Power Syst. 2016, 32, 2234–2242. [Google Scholar] [CrossRef]
- National Energy Commission of Chile (CNE). Electricity Tariffing. 2013. Available online: http://www.cne.cl/tarificacion/electricidad/introduccion-a-electricidad (accessed on 29 August 2013).
- Haas, J. Inputs for LEELO (Long-Term Energy Expansion Linear Optimization) (Version v38/v39) [Data Set]; Zenodo: Meyrin, Switzerland; Available online: https://zenodo.org/record/1344412#.YIv__rWGmHs (accessed on 3 May 2018).





| Technology | Investment Costs | Lifetime [Years] |
|---|---|---|
| Wind | 900 k€/MW | 25 |
| PV | 330 k€/MW | 40 |
| BESS | 24.9/70.9 k€/MWh | 10 |
| Set of Cases | Code | Description |
|---|---|---|
| Levels of available inertia | S1 | 6 GW |
| S2 | 12 GW | |
| S3 | 18 GW | |
| S4 | 24 GW | |
| System-wide versus zone-specific reserves | SW | System-wide frequency stability constraint |
| ZS | Zone-specific frequency stability constraint | |
| What technology provides reserves (FFR contribution) | IC: NO | Without frequency stability constraint |
| IC: HYDRO | Only hydropower provides FFR | |
| IC: BESS | Only BESSs and hydropower plants provide FFR | |
| IC: RGT | Only RGTs and hydropower plants provide FFR | |
| IC: ALL | BESSs, RGTs, and hydropower plants provide FFR |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Inostroza, P.; Rahmann, C.; Álvarez, R.; Haas, J.; Nowak, W.; Rehtanz, C. The Role of Fast Frequency Response of Energy Storage Systems and Renewables for Ensuring Frequency Stability in Future Low-Inertia Power Systems. Sustainability 2021, 13, 5656. https://0-doi-org.brum.beds.ac.uk/10.3390/su13105656
González-Inostroza P, Rahmann C, Álvarez R, Haas J, Nowak W, Rehtanz C. The Role of Fast Frequency Response of Energy Storage Systems and Renewables for Ensuring Frequency Stability in Future Low-Inertia Power Systems. Sustainability. 2021; 13(10):5656. https://0-doi-org.brum.beds.ac.uk/10.3390/su13105656
Chicago/Turabian StyleGonzález-Inostroza, Pablo, Claudia Rahmann, Ricardo Álvarez, Jannik Haas, Wolfgang Nowak, and Christian Rehtanz. 2021. "The Role of Fast Frequency Response of Energy Storage Systems and Renewables for Ensuring Frequency Stability in Future Low-Inertia Power Systems" Sustainability 13, no. 10: 5656. https://0-doi-org.brum.beds.ac.uk/10.3390/su13105656