
Active and Reactive Power Collaborative Optimization for Active Distribution Networks Considering Bi-Directional V2G Behavior

Abstract
:1. Introduction
- (1)
- In practice, driving is the primary attribute of EVs. As highly autonomous individuals, the preferences of EV users cannot be ignored.
- (2)
- The reactive power compensation capability of EVs is not only restricted by the active power and capacity of the charger, but also needs to consider the constraints of the power electronic equipment of the charger.
- (3)
- Most of the existing studies are based on the general DN, but ADN contains many DGs, wind power, photovoltaic, reactive power compensation devices, etc., and when the scale of plugged-in EVs and the demand preference of EV users are taken into account, the current research findings are inevitably not applicable to this new scenario.
- (1)
- Considering the users’ preference, the plugged-in EVs are subdivided into three categories, and then the EV control model is established separately. The establishment of the differentiated EV control model is more in line with the actual scenario.
- (2)
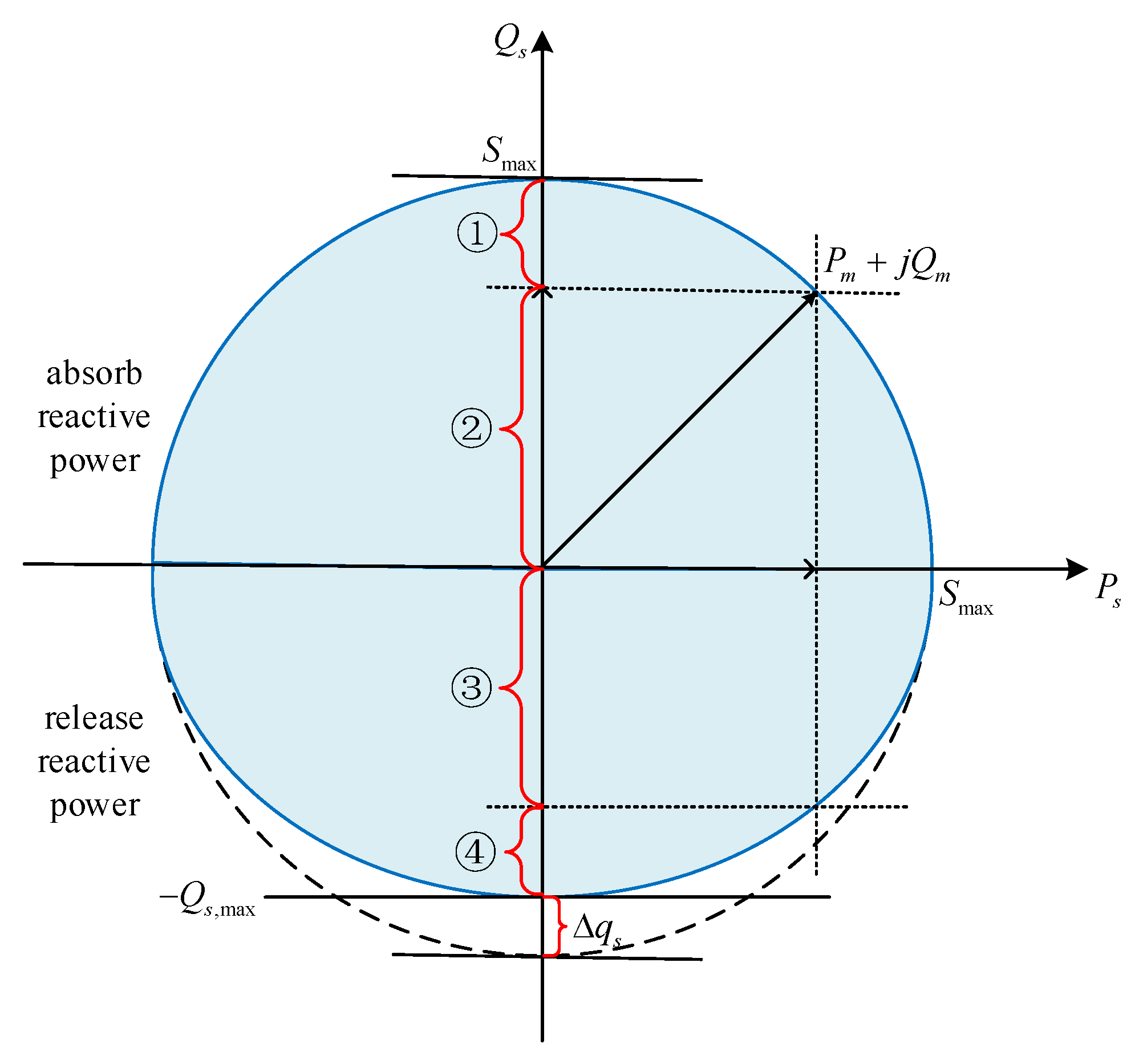
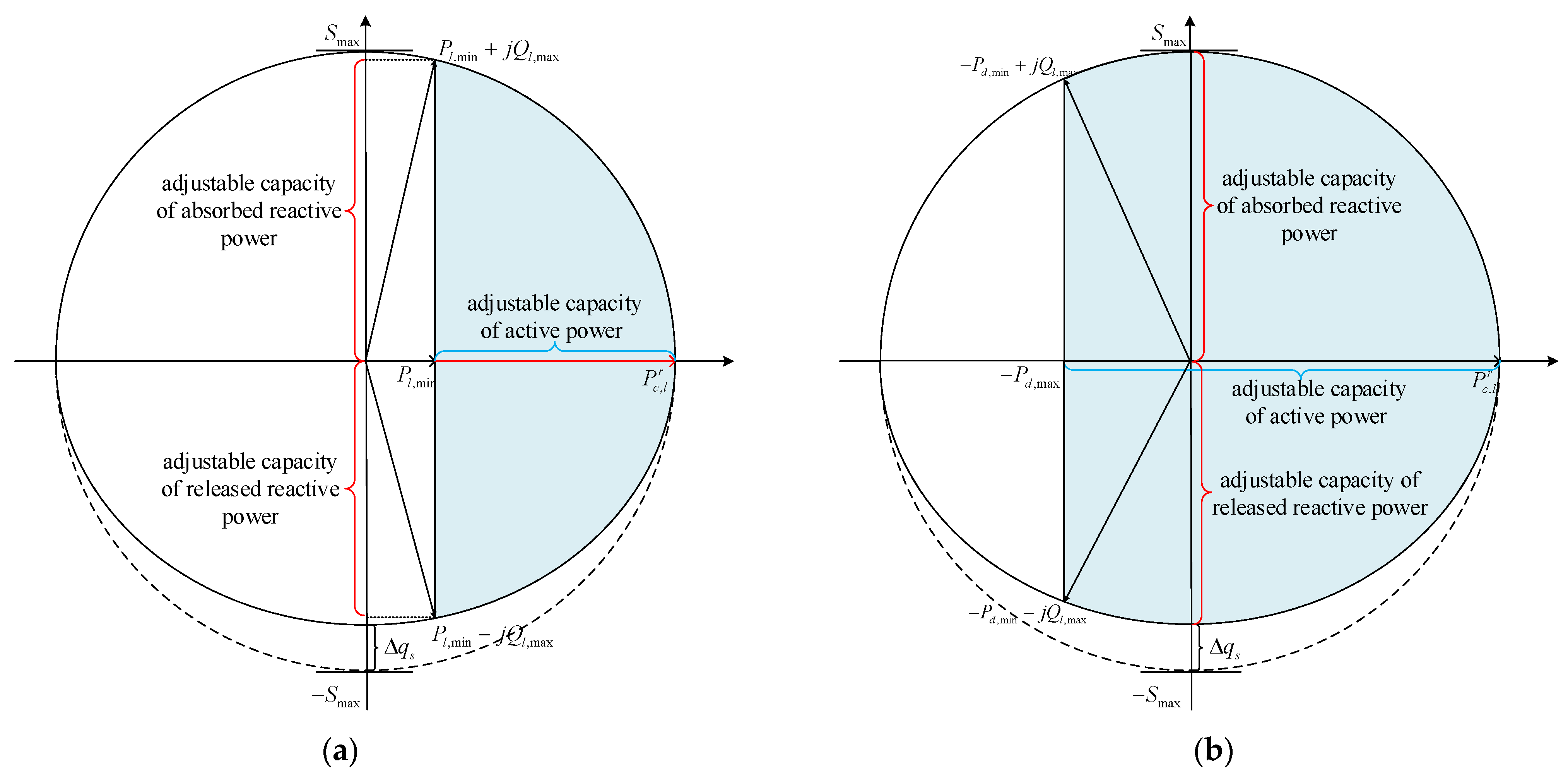
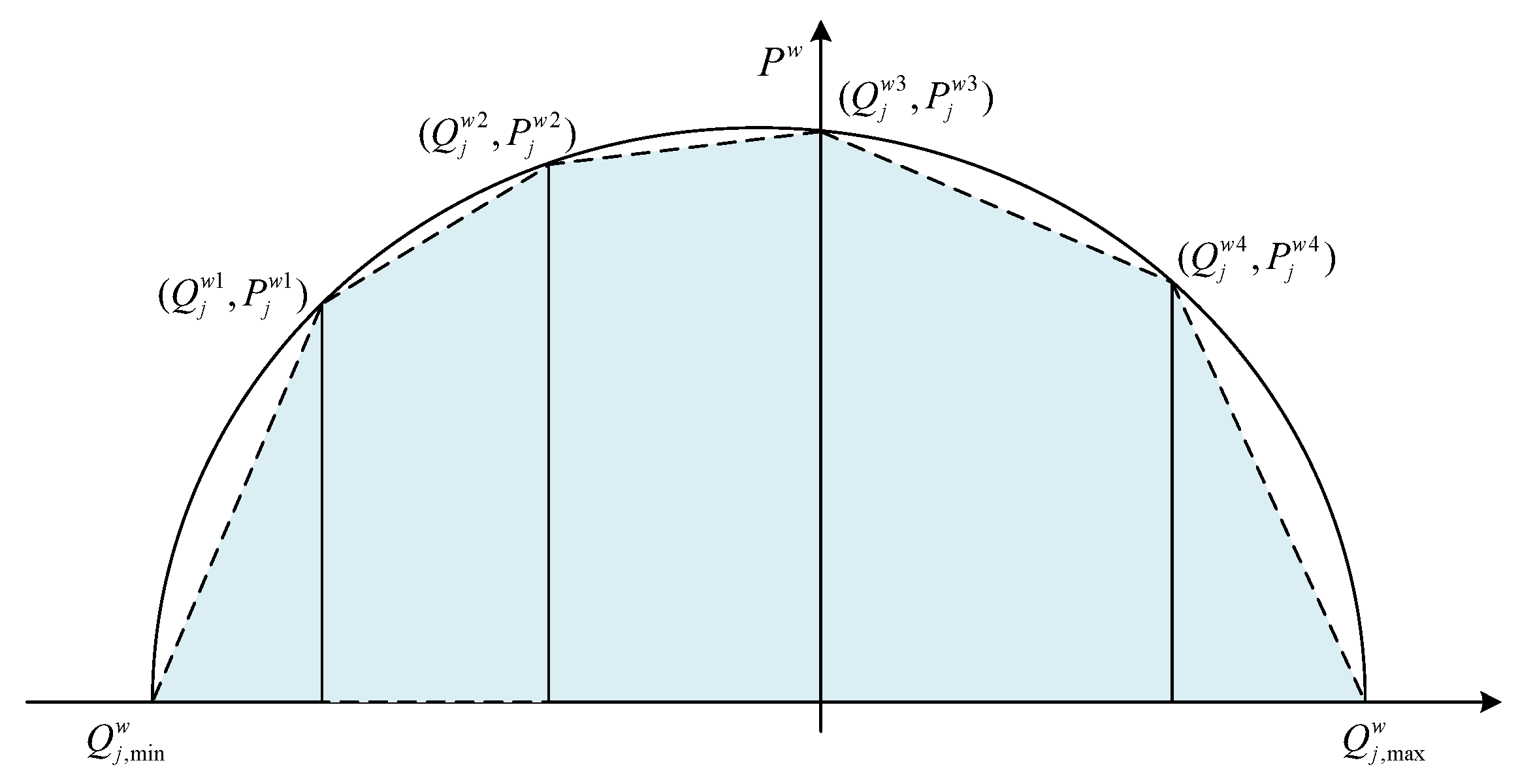
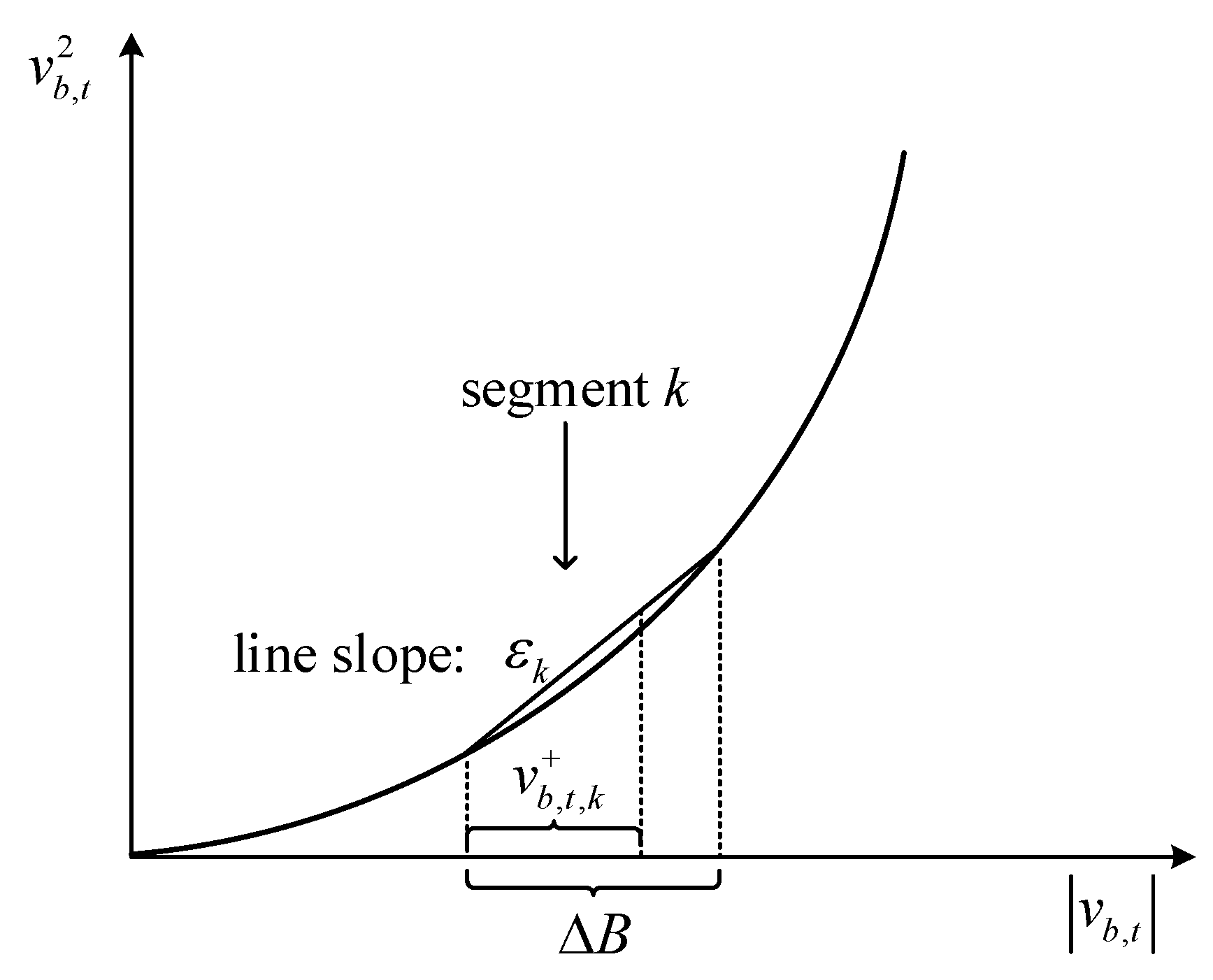
- Based on the topological constraints of the charging pile, the reactive power compensation capacity of the EV is modeled to derive a more accurate range of reactive power.
- (3)
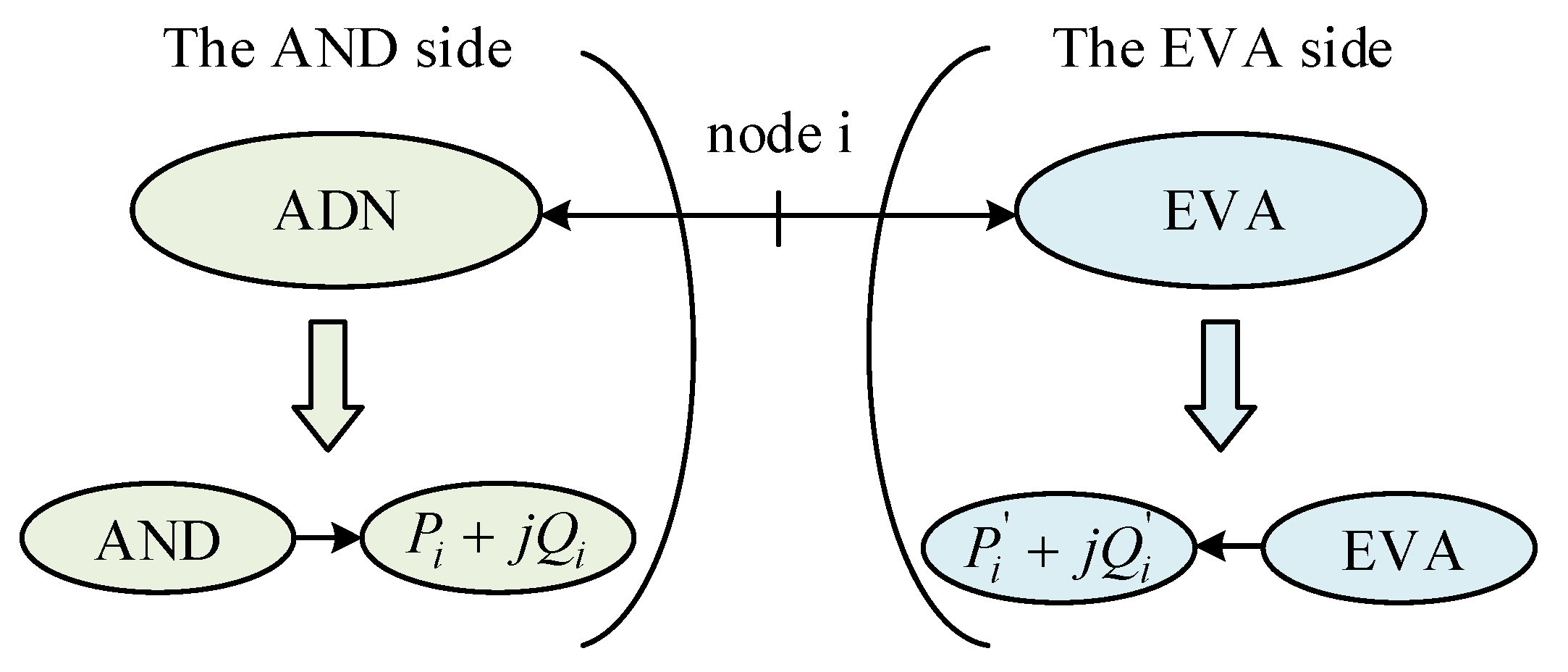
- The proposed model is solved by a decentralized algorithm, which is developed based on the Alternating Direction Method of Multipliers (ADMM). The operating problems of the ADNO and EVA are coordinated and optimized independently.
2. Proposed Methodology
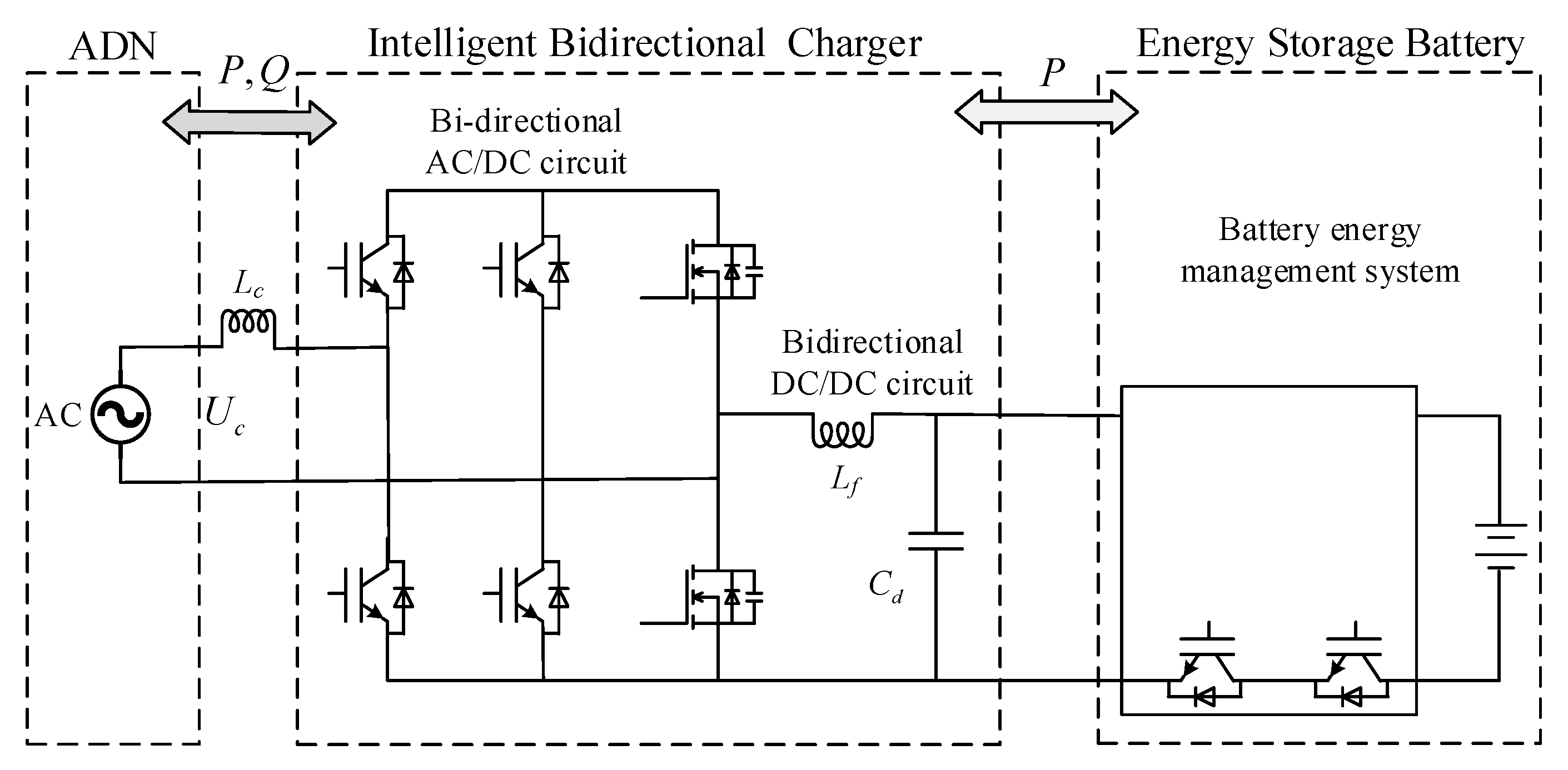
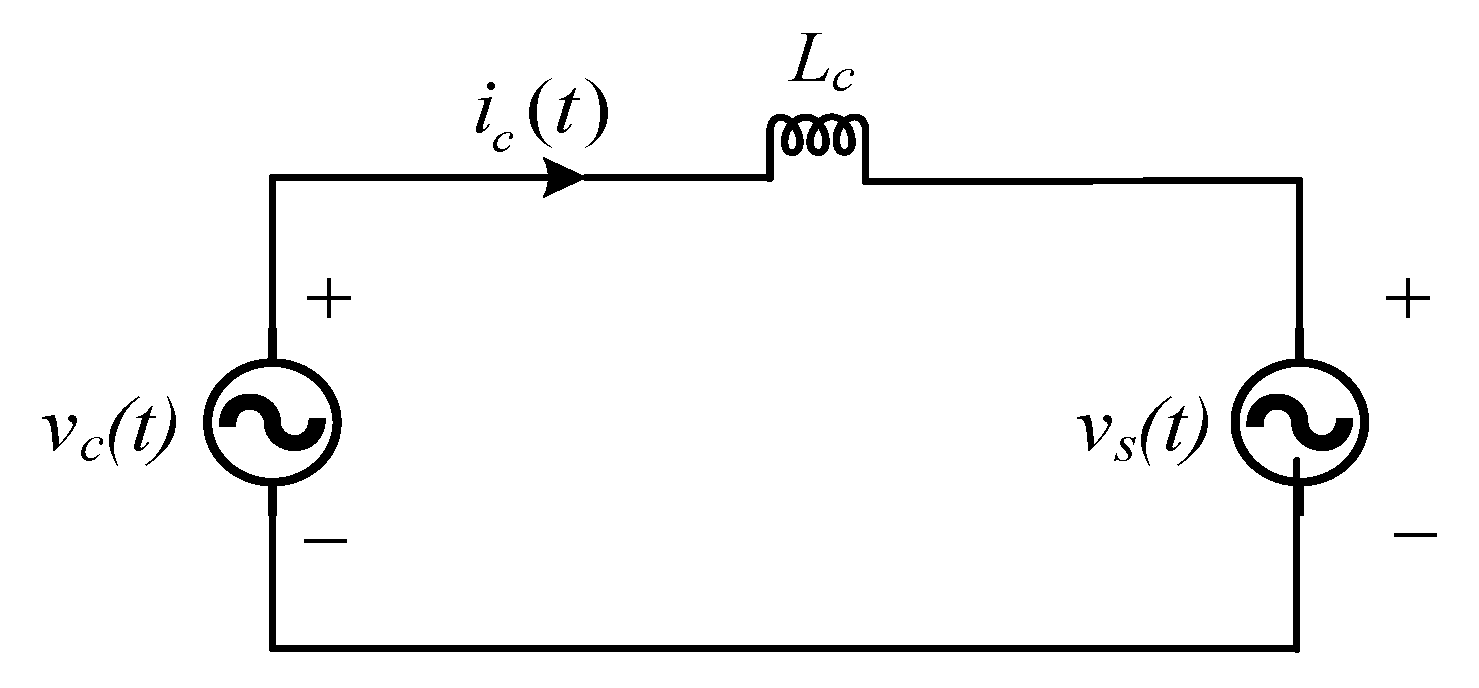
2.1. Modeling Collaborative Active-Reactive Power of EV Cluster
- (1)
- The ADN voltage is an ideal sine wave with stable frequency (f = 50 Hz).
- (2)
- The charger is normally connected to the ADN via cable, so to simplify the calculation, assume that the impedance between the intelligent bi-directional charger and the ADN is the inductive impedance; the sum of the impedance stacks is recorded as Lc.
- (3)
- The power operation of the charger is realized through the smart control circuit of the charger. The influence of the control circuit on the voltage of the charger is ignored.
2.2. Problem Formulation
- 1.
- ADN operation constraints:
- 2.
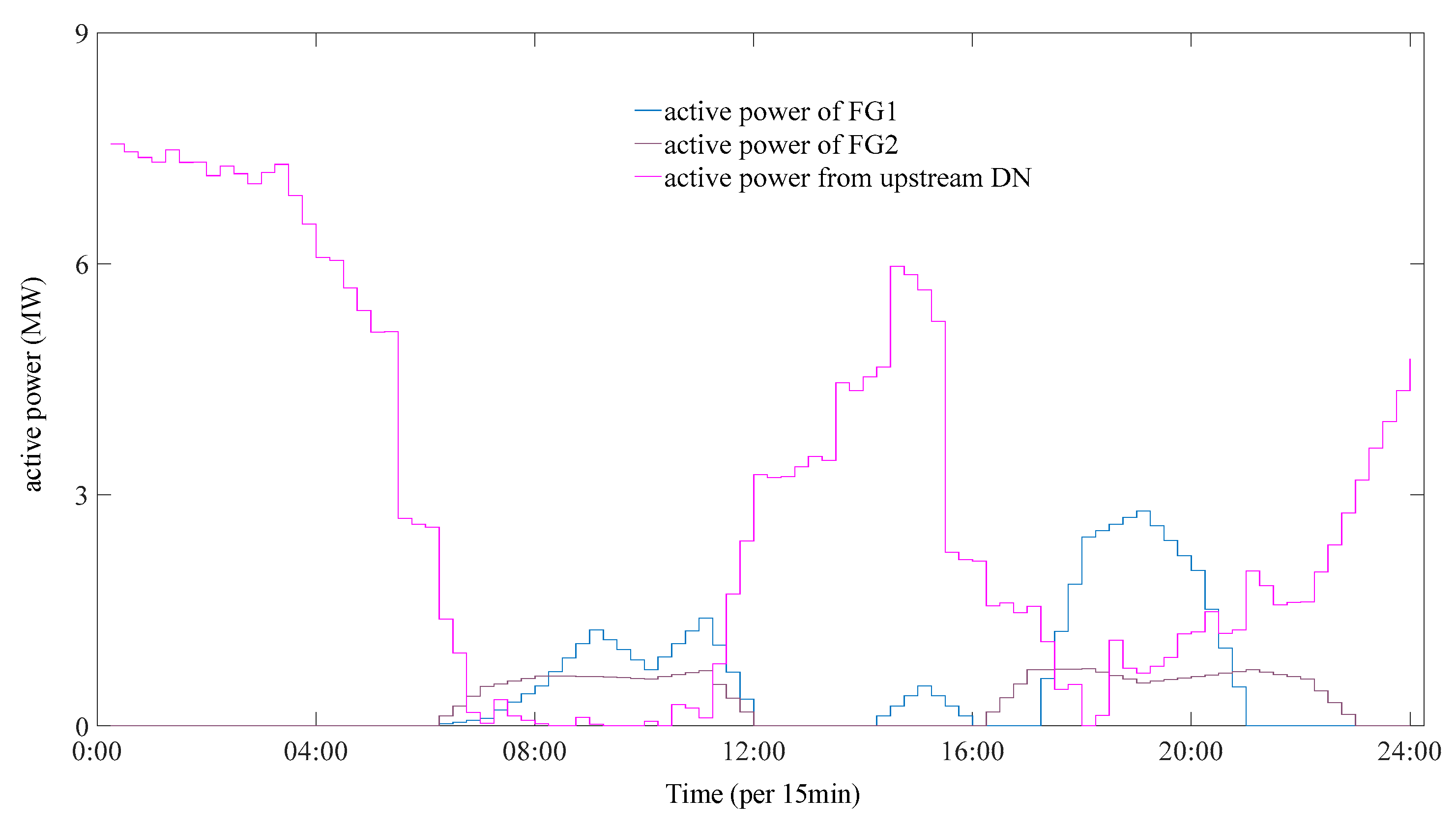
- FGs operation constraints:
- 3.
- RES operation constraints:
- 4.
- SVC operation constraints:
2.3. The Solution Strategy of the Proposed Model
3. Results and Discussion
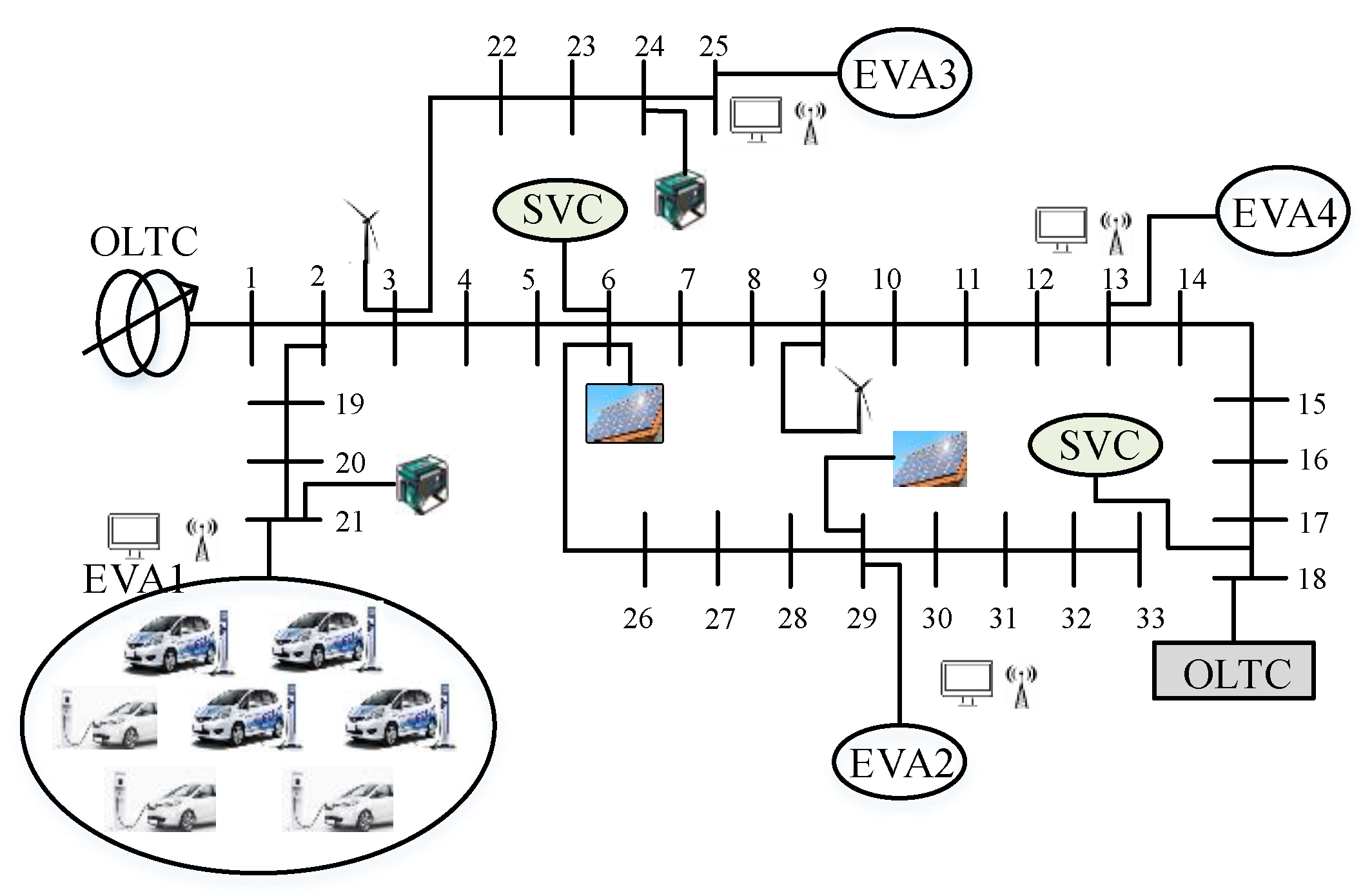
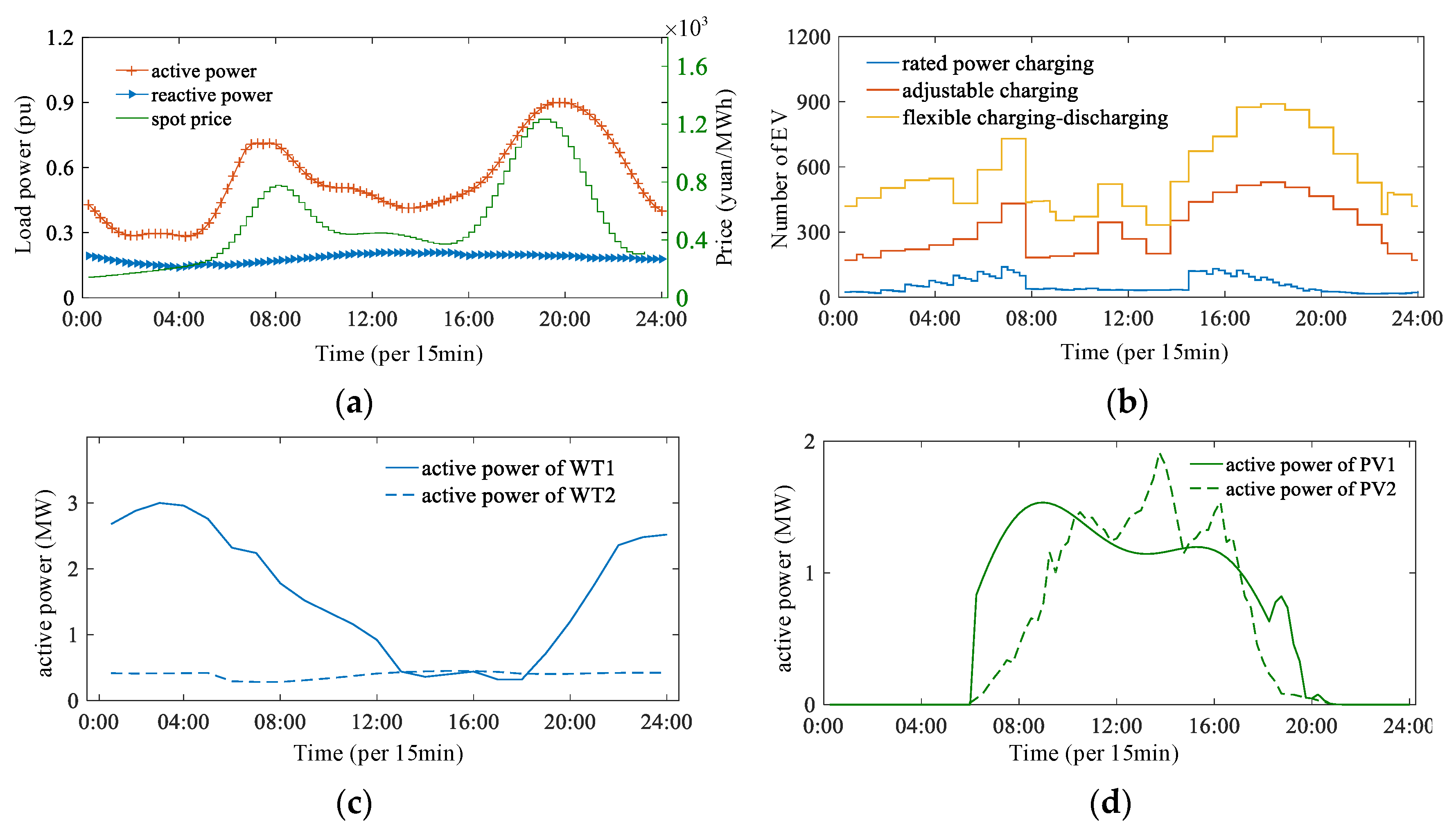
3.1. System Data
3.2. Study Results and Discussions
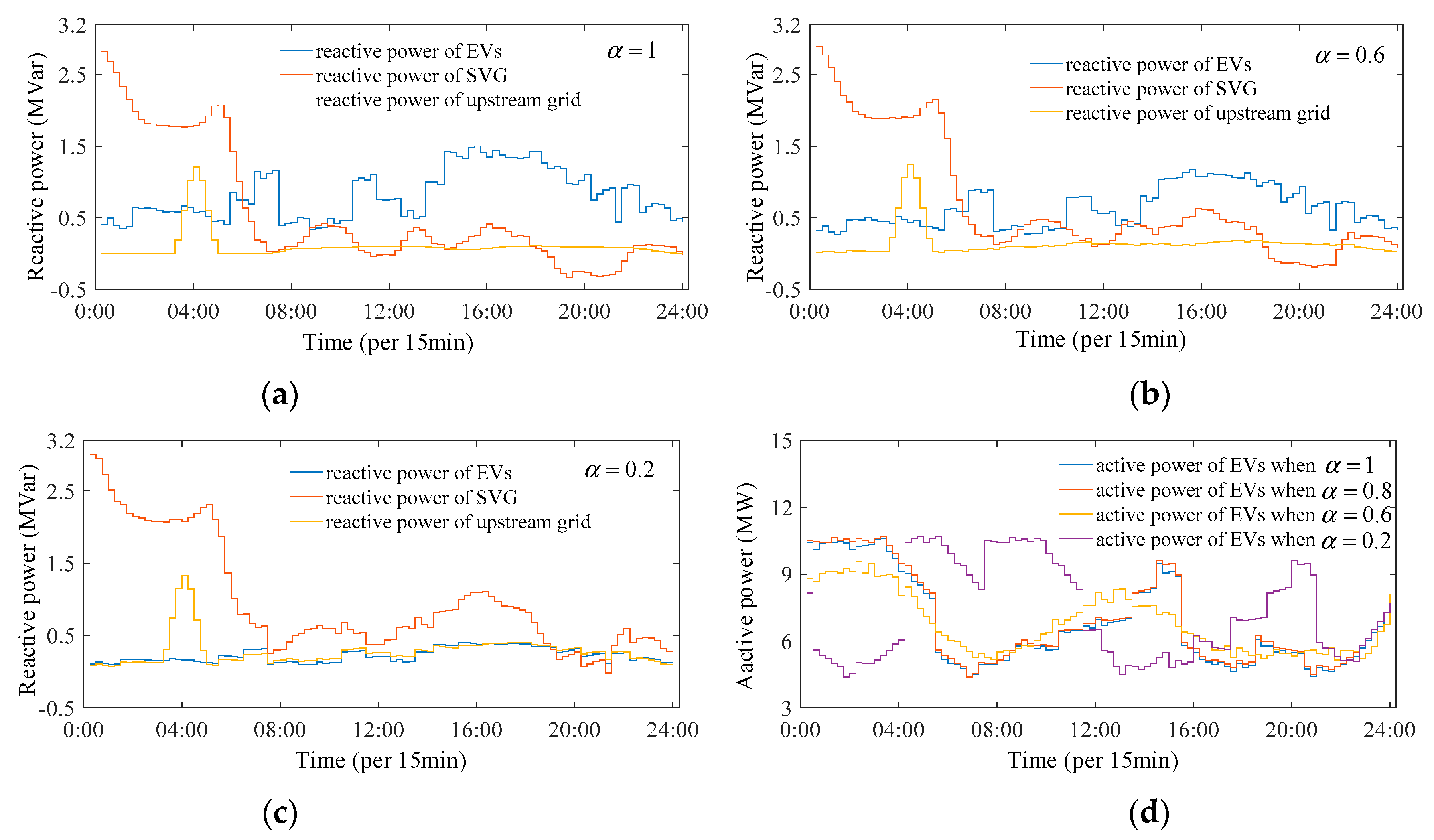
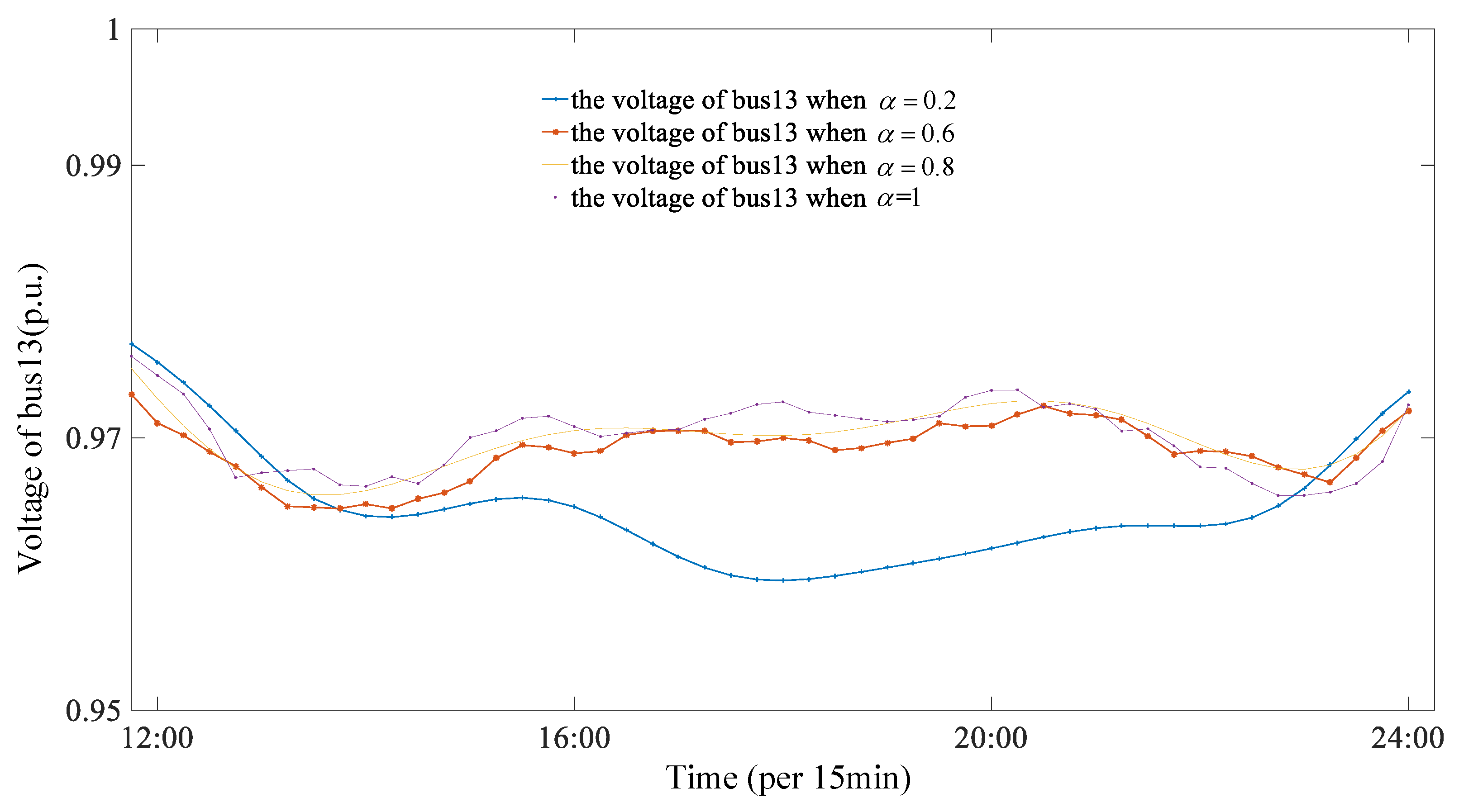
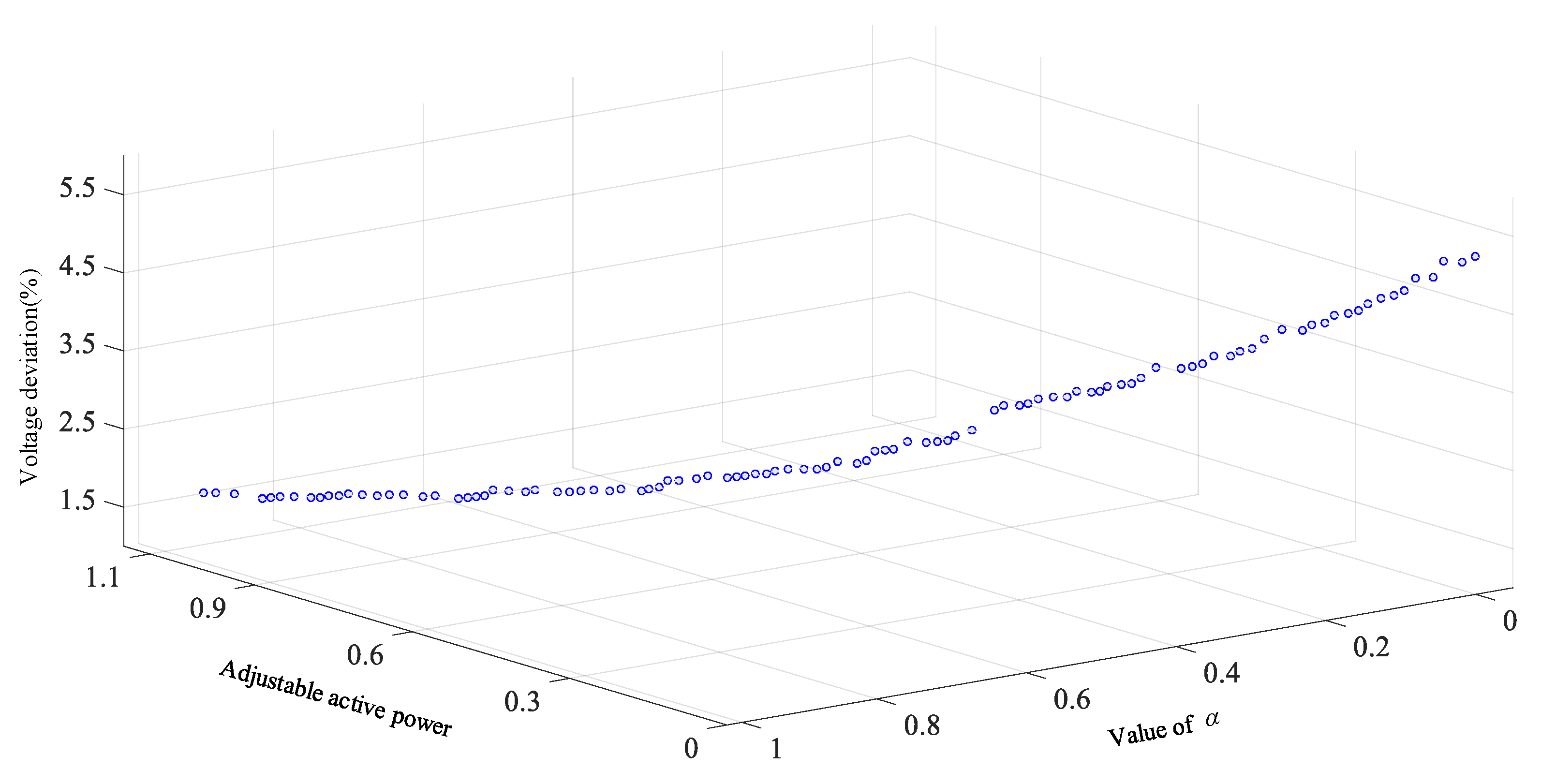
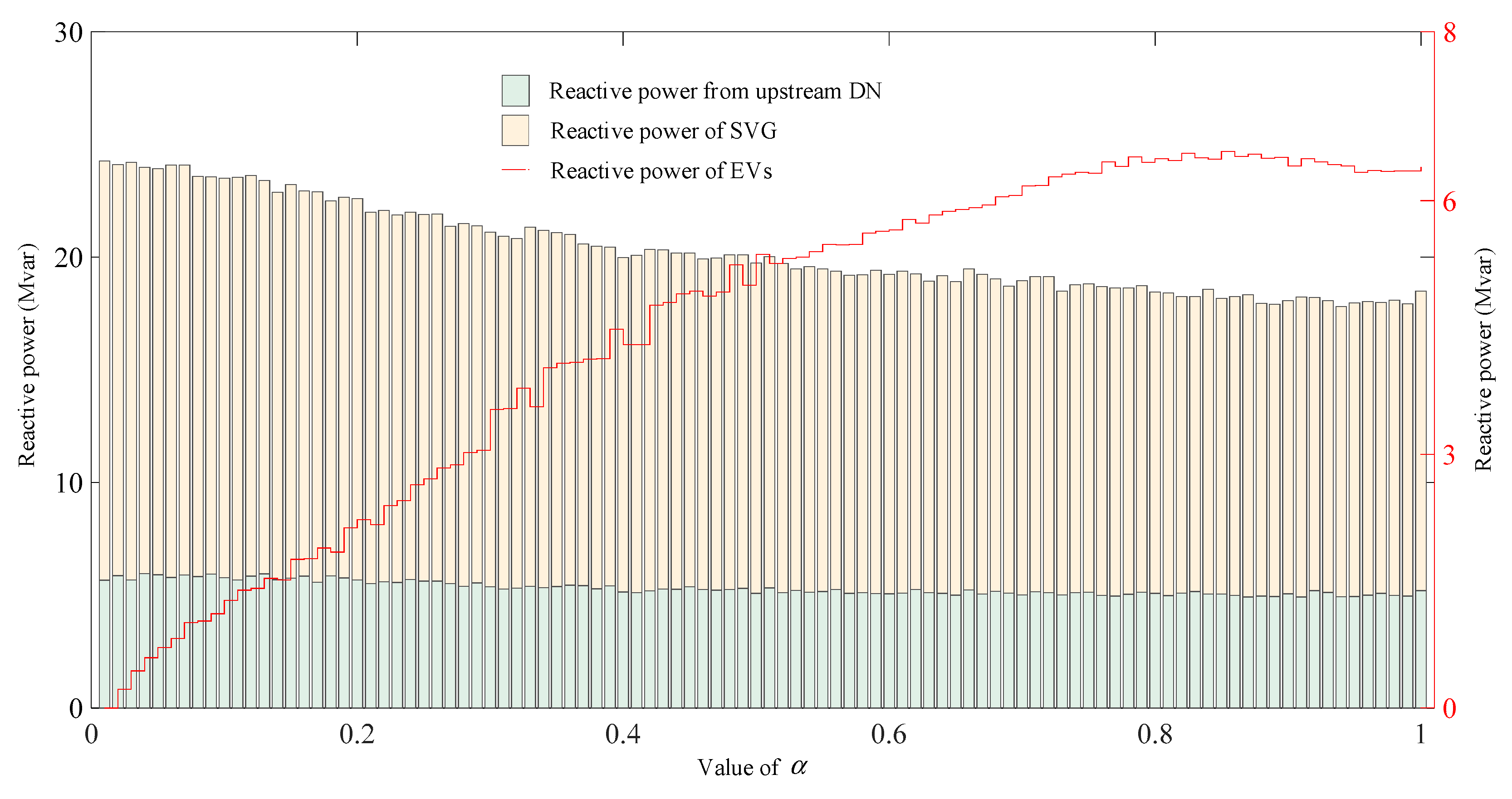
3.2.1. Coefficients Selection of Objective Function
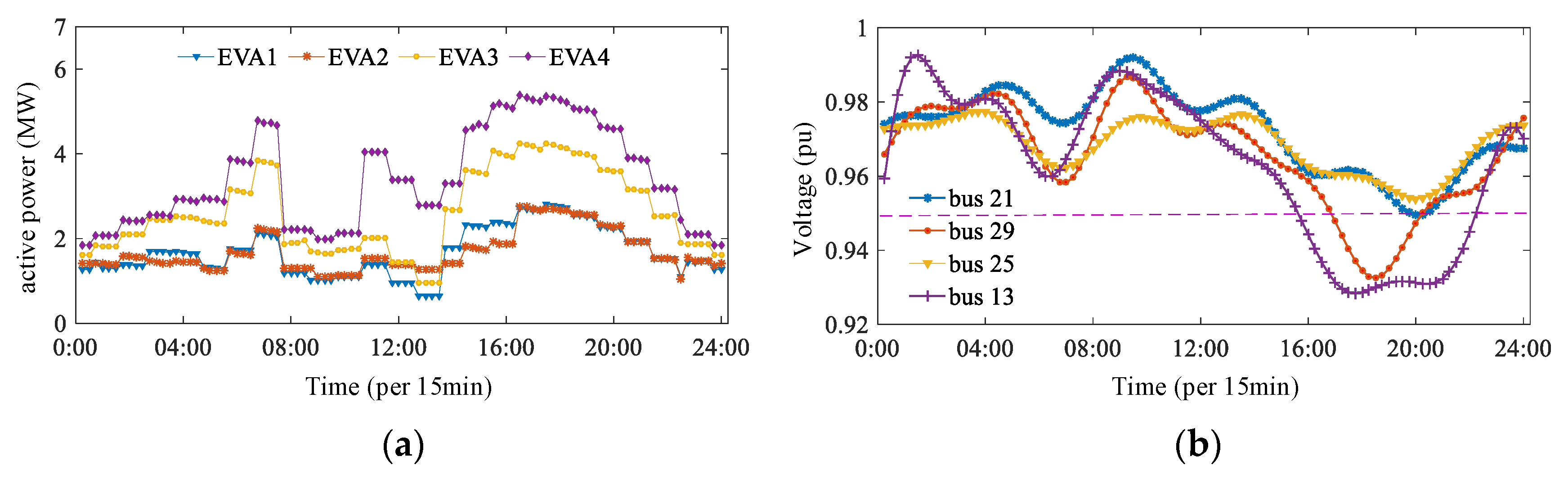
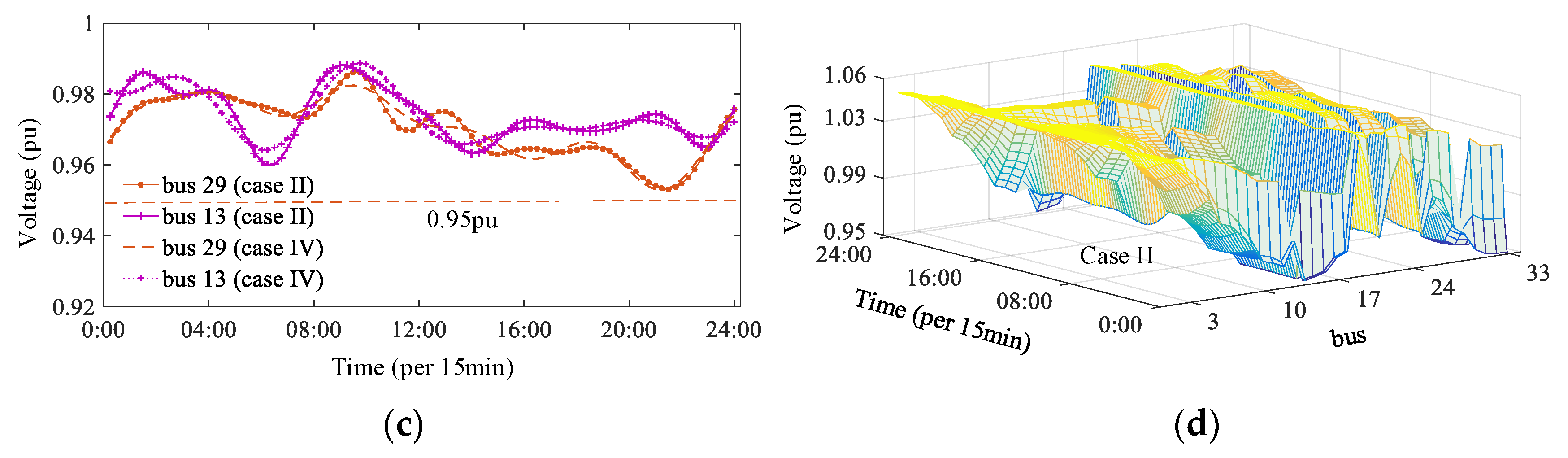
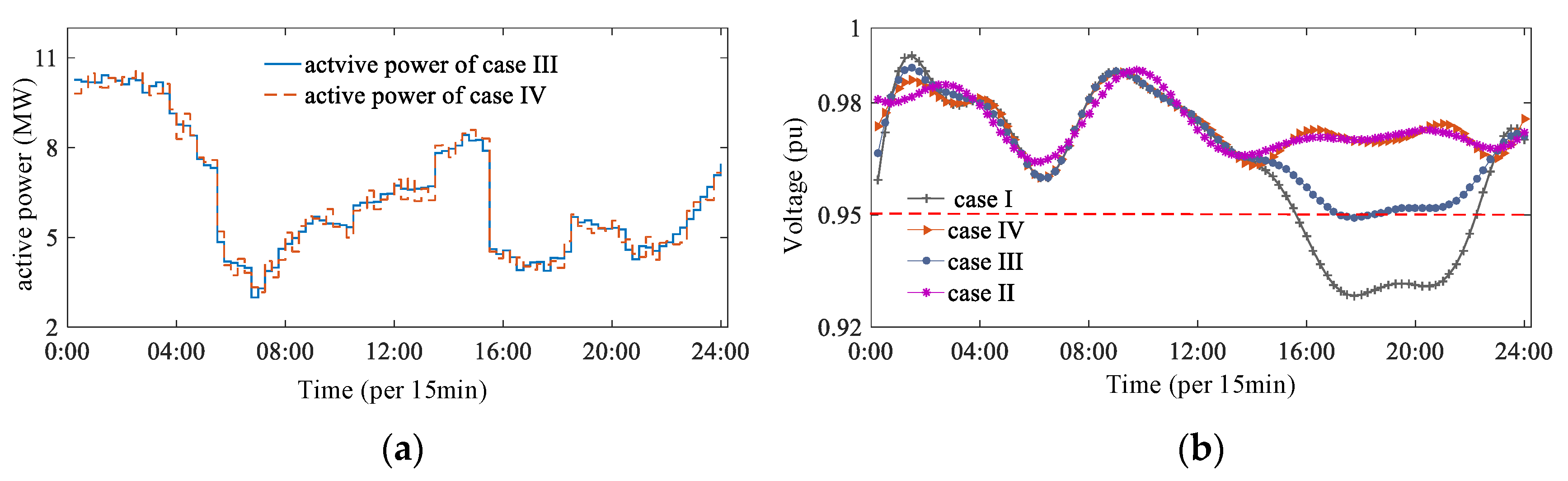
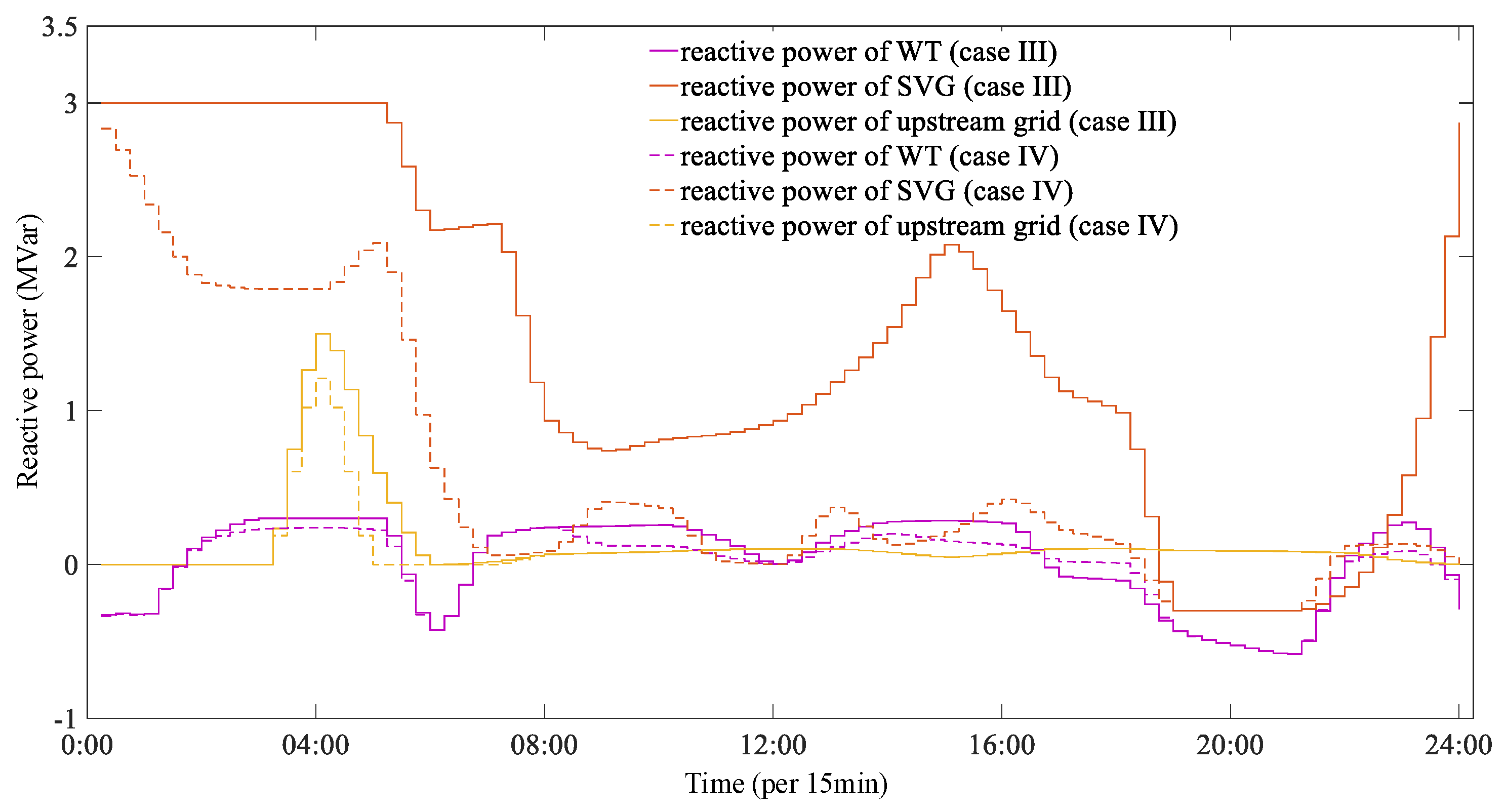
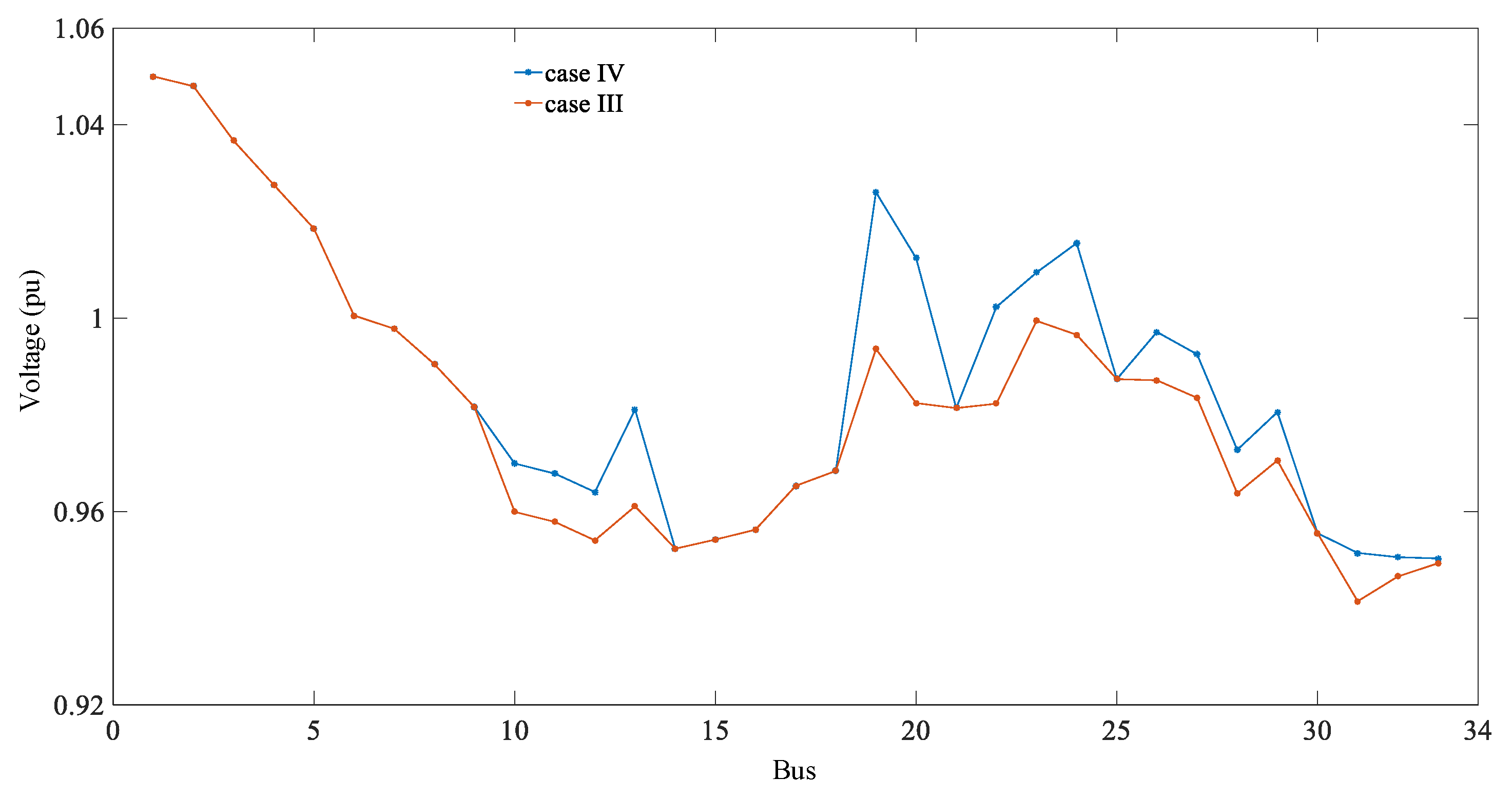
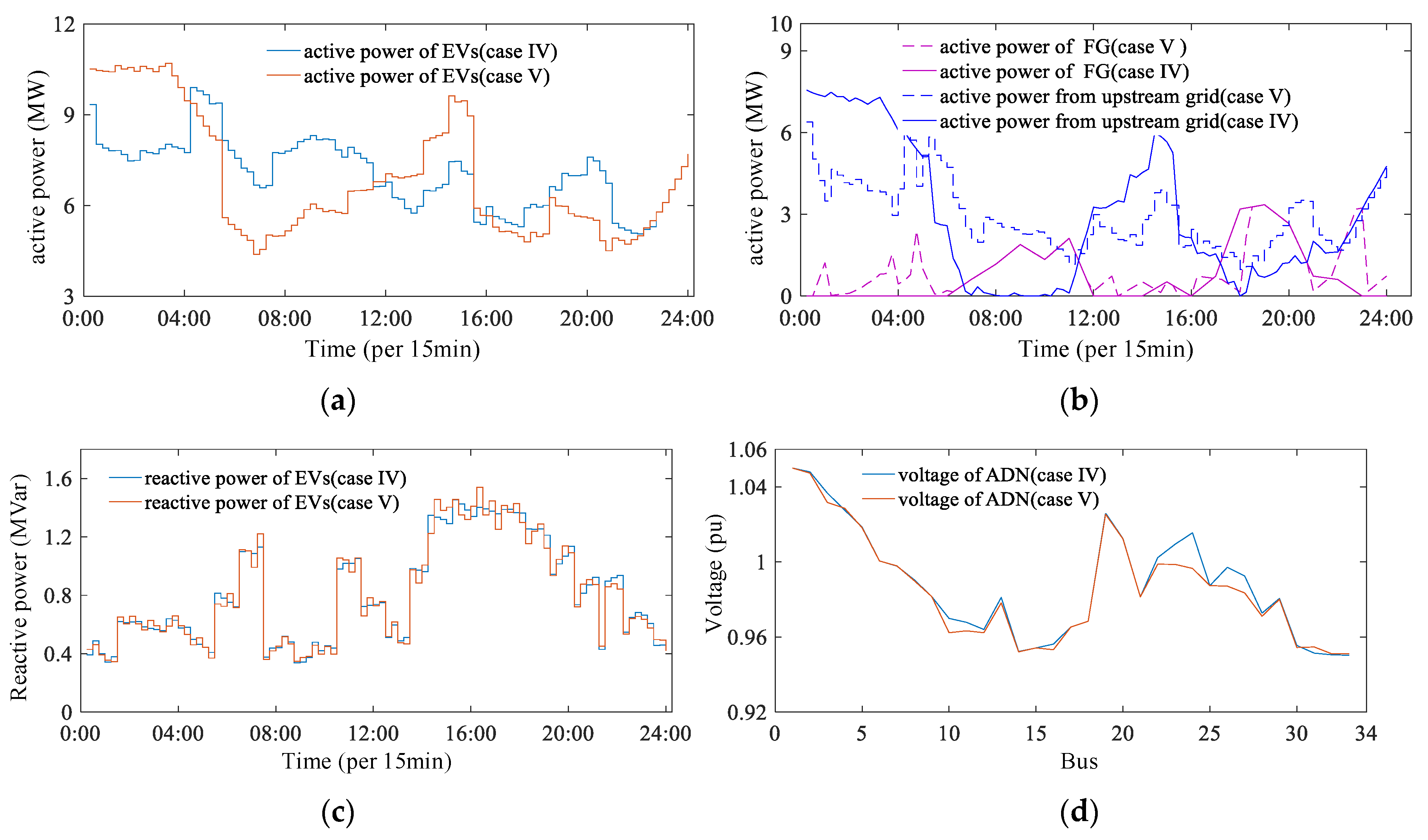
3.2.2. Analysis of Different Test Cases
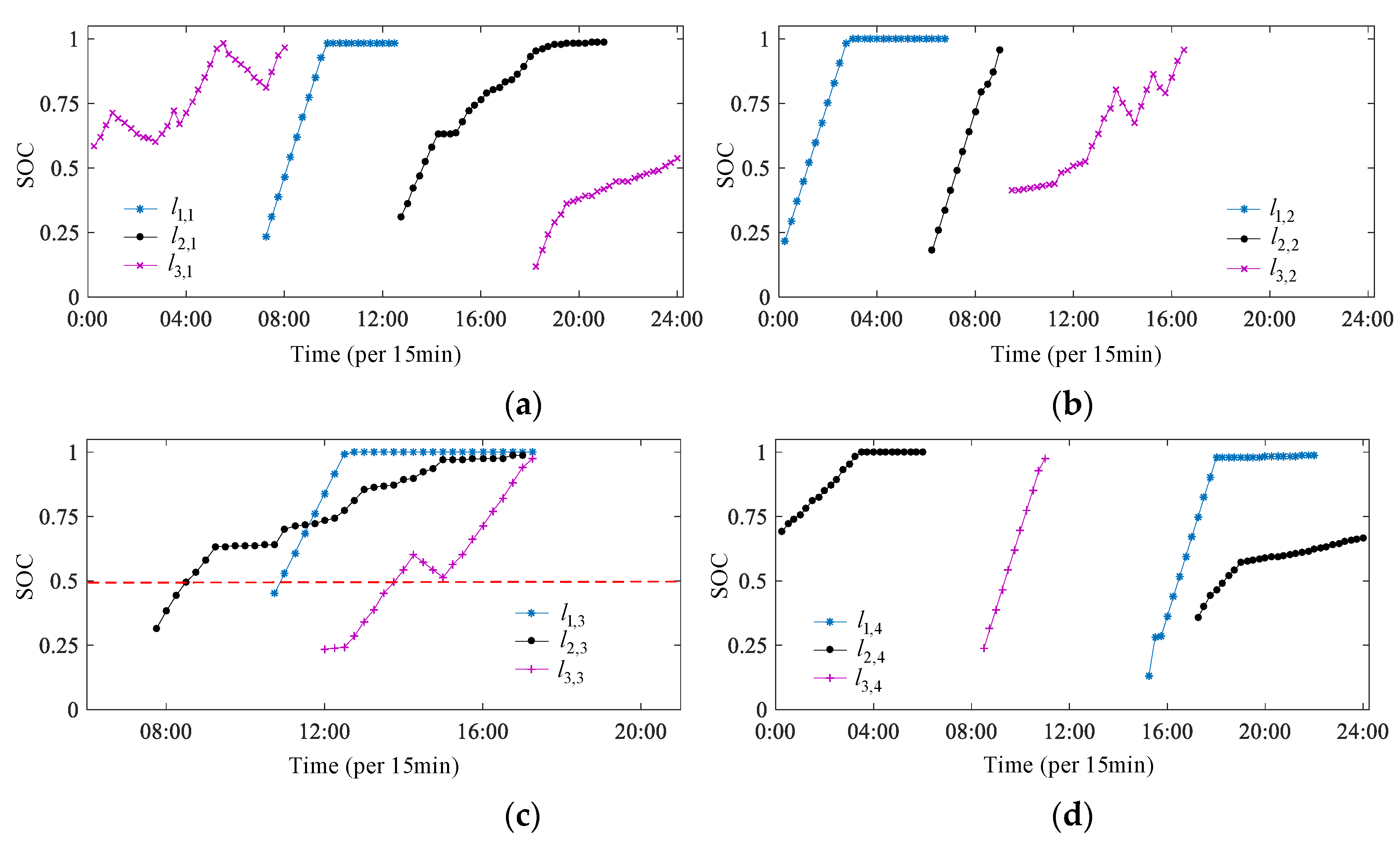
3.2.3. Charging Process under Demand Preference
3.3. Superiority Analysis of the Proposed Model
3.4. Analysis in EVs Penetration Point of View
4. Conclusions and Future Works
- (1)
- The total energy cost is reduced and the voltage profile of ADN is improved by employing the model proposed in this paper. The energy cost is reduced by about 15.5 percent, and the voltage profile is improved by about 0.09 percent.
- (2)
- The demand preference of EV users is taken into account in the proposed model. The plugged-in EVs are divided into three categories: rated power charging EVs, non-discharging EVs, and flexible charging–discharging EVs. Users can choose different charging modes, which are more in line with the actual scenario. The study results show that the proposed model can fully guarantee the users’ demand preference.
- (3)
- A distributed solution strategy based on ADMM is designed for the proposed model. The experimental results show that the distributed strategy proposed in this paper can save about two thirds of the solving time.
- (1)
- Uncertainty: There are multiple uncertainties, such as the arrival and departure time of EVs, active power of WT and PV, system failure, and so on. The question of how to consider these uncertainties in the established model needs further research.
- (2)
- Interactivity: In practice, users can interact with the EVA by making an appointment to charge, switching charging modes, adjusting the charging power or discharging power, and so on. The question of how to improve the model to meet the timely interaction between the EV and EVA is another direction to be further studied.
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Kumar, M.D.; Jabbari, G.M.; Ali, A.; Li, L.; Jiangfeng, Z. A review on resilience studies in active distribution systems. Renew. Sustain. Energy Rev. 2021, 135, 110201. [Google Scholar]
- Flammini, M.G.; Prettico, G.; Julea, A.; Fulli, G.; Mazza, A.; Chicco, G. Statistical characterisation of the real transaction data gathered from electric vehicle charging stations. Electr. Power Syst. Res. 2018, 166, 136–150. [Google Scholar] [CrossRef]
- Singh, J.; Tiwari, R. Electric vehicles reactive power management and reconfiguration of distribution system to minimise losses. IET Gener. Transm. Distrib. 2020, 14, 6285–6293. [Google Scholar] [CrossRef]
- Wei, C.; Xu, J.; Liao, S.; Sun, Y. Aggregation and Scheduling Models for Electric Vehicles in Distribution Networks Considering Power Fluctuations and Load Rebound. IEEE Trans. Sustain. Energy 2020, 11, 2755–2764. [Google Scholar] [CrossRef]
- Hongesombut, K.; Punyakunlaset, S.; Romphochai, S. Under Frequency Protection Enhancement of an Islanded Active Distribution Network Using a Virtual Inertia-Controlled-Battery Energy Storage System. Sustainability 2021, 13, 484. [Google Scholar] [CrossRef]
- Abessi, A.; Shirazi, E.; Jadid, S.; Shafie-khah, M. Sustainable and Resilient Smart House Using the Internal Combustion Engine of Plug-in Hybrid Electric Vehicles. Sustainability 2020, 12, 6046. [Google Scholar] [CrossRef]
- Wu, J.; Hu, J.; Ai, X.; Zhang, Z.; Hu, H. Multi-time scale energy management of electric vehicle model-based prosumers by using virtual battery model. Appl. Energy 2019, 251, 113312. [Google Scholar] [CrossRef]
- Shi, R.; Li, S.; Zhang, P.; Lee, K. Integration of renewable energy sources and electric vehicles in V2G network with adjustable robust optimization. Renew. Energy 2020, 153, 1067–1080. [Google Scholar] [CrossRef]
- Meesenburg, W.; Thingvad, A.; Elmegaard, B.; Marinelli, M. Combined provision of primary frequency regulation from Vehicle-to-Grid (V2G) capable electric vehicles and community-scale heat pump. Sustain. Energy Grids Netw. 2020, 23, 100382. [Google Scholar] [CrossRef]
- Dong, C.; Chu, R.; Morstyn, T.; Mcculloch, M.; Jia, H. Online Rolling Evolutionary Decoder-Dispatch Framework for the Secondary Frequency Regulation of Time-Varying Electrical-Grid-Electric-Vehicle System. IEEE Trans. Smart Grid 2021, 12, 871–884. [Google Scholar] [CrossRef]
- Pirouzi, S.; Aghaei, J.; Niknam, T.; Khooban, M.H.; Dragicevic, T.; Farahmand, H.; Korpas, M.; Blaabjerg, F. Power Conditioning of Distribution Networks via Single-Phase Electric Vehicles Equipped. IEEE Syst. J. 2019, 13, 3433–3442. [Google Scholar] [CrossRef] [Green Version]
- Pirouzi, S.; Latify, M.A.; Yousefi, G.R. Conjugate active and reactive power management in a smart distribution network through electric vehicles: A mixed integer-linear programming model. Sustain. Energy Grids Netw. 2020, 22, 100344. [Google Scholar] [CrossRef]
- Fu, Y.; Meng, X.; Su, X.; Jabalameli, N.; Dong, Z. Coordinated optimisation of PEV charging with the support of reactive discharging and phase switching in unbalanced active distribution networks. IET Gener. Transm. Distrib. 2020, 14, 4703–4710. [Google Scholar] [CrossRef]
- Saffari, M.; Kia, M.; Vahidinasab, V.; Mehran, K. Integrated active/reactive power scheduling of interdependent microgrid and EV fleets based on stochastic multiobjective normalised normal constraint. IET Gener. Transm. Distrib. 2020, 14, 2055–2064. [Google Scholar] [CrossRef]
- Sousa, T.; Hashemi, S.; Andersen, P.B. Raising the potential of a local market for the reactive power provision by electric vehicles in distribution grids. Gener. Transm. Distrib. IET 2019, 13, 2446–2454. [Google Scholar] [CrossRef] [Green Version]
- Kikusato, H.; Mori, K.; Yoshizawa, S.; Fujimoto, Y.; Asano, H.; Hayashi, Y.; Kawashima, A.; Inagaki, S.; Suzuki, T. Electric Vehicle Charge-Discharge Management for Utilization of Photovoltaic by Coordination between Home and Grid Energy Management Systems. IEEE Trans. Smart Grid 2019, 10, 3186–3197. [Google Scholar] [CrossRef]
- Wang, P.; Zou, S.; Ma, Z. A Partial Augmented Lagrangian Method for Decentralized Electric Vehicle Charging in Capacity-Constrained Distribution Networks. IEEE Access 2019, 7, 118229–118238. [Google Scholar] [CrossRef]
- Clairand, J.-M. Participation of Electric Vehicle Aggregators in Ancillary Services Considering Users’ Preferences. Sustainability 2020, 12, 8. [Google Scholar] [CrossRef] [Green Version]
- Engr, B.; Lek, A.; Erenolu, A.K.; Erdin, O.; Catalo, J. User-comfort oriented optimal bidding strategy of an electric vehicle aggregator in day-ahead and reserve markets. Int. J. Electr. Power Energy Syst. 2020, 122, 106194. [Google Scholar]
- He, T.; Lu, D.C.; Wu, M.; Yang, Q.; Li, T.; Liu, Q. Four-Quadrant Operations of Bidirectional Chargers for Electric Vehicles in Smart Car Parks: G2V, V2G, and V4G. Energies 2020, 14, 181. [Google Scholar] [CrossRef]
- Monsef, H.; Siano, P. Design of a risk-averse decision making tool for smart distribution network operators under severe uncertainties: An IGDT-inspired augment ε-constraint based multi-objective approach. Energy 2016, 116, 214–235. [Google Scholar]
- Kanagaraj, N. Photovoltaic and Thermoelectric Generator Combined Hybrid Energy System with an Enhanced Maximum Power Point Tracking Technique for Higher Energy Conversion Efficiency. Sustainability 2021, 13, 3144. [Google Scholar]
- Qing, M.; Tang, F.; Liu, F.; Liu, D.; Du, N.; Hu, B. An Analytical Method for Estimating the Maximum Penetration of DFIG Considering Frequency Stability. Sustainability 2020, 12, 9850. [Google Scholar] [CrossRef]
- Jovanović, J.; Denić, D. A Cost-effective Method for Resolution Increase of the Twostage Piecewise Linear ADC Used for Sensor Linearization. Meas. Sci. Rev. 2016, 16, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Giraldo, O.; González, W. Dynamic active and reactive power compensation in distribution networks with batteries: A day-ahead economic dispatch approach. Comput. Electr. Eng. 2020, 85, 1–16. [Google Scholar]
- Farsangi, S.N.; Hadayeghparast, S.; Mehdinejad, M.; Shayanfar, H. A novel stochastic energy management of a microgrid with various types of distributed energy resources in presence of demand response programs. Energy 2018, 160, 257–274. [Google Scholar] [CrossRef]
- Aliabadi, S.F.; Taher, S.A.; Shahidehpour, M. Smart deregulated grid frequency control in presence of renewable energy resources by EVs charging control. IEEE Trans. Smart Grid 2018, 9, 1073–1085. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | FG1 | FG2 |
|---|---|---|
| Pmin/MW | 1 | 1.5 |
| Pmax/MW | 3 | 5 |
| Qmin/MVar | −0.5 | −0.5 |
| Qmax/MVar | 1.5 | 1.5 |
| Pdmax/MW·Δt | 2 | 3.5 |
| Pumax/MW·Δt | 2 | 3.5 |
| γ/MW | 600 | 800 |
| a/yuan | 180 | 150 |
| b/yuan·MW | 480 | 450 |
| c/yuan·MW2 | 0.021 | 0.820 |
| s/yuan | 60 | 90 |
| Parameters | Value |
|---|---|
| Pc/kW·h | 10 |
| Pd/kW·h | 10 |
| ηc | 0.95 |
| ηd | 0.95 |
| E/kW·h | 40 |
| Sex | 0.95 |
| Sthr | 0.5 |
| Cases | EV Control Capability | Characteristics | ||
|---|---|---|---|---|
| Users’ Preference | Active Power | Reactive Power | ||
| Case I | ✕ | ✕ | ✕ | No reactive power. All EVs are charged with rated active power. |
| Case II | ✕ | ✓ | ✓ | Regardless of preference of EV users. Operation with both active power and reactive power. |
| Case III | ✓ | ✓ | ✕ | Considering preference of EV users. Operation with only active power. |
| Case IV | ✓ | ✓ | ✓ | Considering preference of EV users. Operation with both active power and reactive power. |
| Items | Values of and | ||
|---|---|---|---|
| Weight coefficient | = 1, = 0 | = 0, = 1 | = 5.58 × 10−5 |
| Energy cost (CNY) | 5.75 × 104 | 6.08 × 104 | 5.93 × 104 |
| Voltage profile (p.u.) | 1.107 | 0.923 | 0.975 |
| Case | Energy Cost (CNY) | Voltage Deviation (%) | The Solving Time (s) |
|---|---|---|---|
| Case IV | 5.93 × 104 | 1.17% | 202.3 |
| Case V | 7.02 × 104 | 1.26% | 621.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, G.; Zhang, B.; Yang, L.; Wang, Y. Active and Reactive Power Collaborative Optimization for Active Distribution Networks Considering Bi-Directional V2G Behavior. Sustainability 2021, 13, 6489. https://0-doi-org.brum.beds.ac.uk/10.3390/su13116489
Xu G, Zhang B, Yang L, Wang Y. Active and Reactive Power Collaborative Optimization for Active Distribution Networks Considering Bi-Directional V2G Behavior. Sustainability. 2021; 13(11):6489. https://0-doi-org.brum.beds.ac.uk/10.3390/su13116489
Chicago/Turabian StyleXu, Gang, Bingxu Zhang, Le Yang, and Yi Wang. 2021. "Active and Reactive Power Collaborative Optimization for Active Distribution Networks Considering Bi-Directional V2G Behavior" Sustainability 13, no. 11: 6489. https://0-doi-org.brum.beds.ac.uk/10.3390/su13116489