
Inventory of Locations of Old Mining Works Using LiDAR Data: A Case Study in Slovakia

 , ,
, ,
Abstract
:1. Introduction
- (1)
- Exploration of the current state of R-OMW objects;
- (2)
- Investigation of the real situation using LiDAR point cloud;
- (3)
- Comparison of positional coordinates belonging to a specific object in selected database sources;
- (4)
- Determination of positional deviations and their evaluation.
2. Materials and Methods
2.1. Localisation of Mining Region
2.2. Register of Old Mining Works and Recent Mining Works
- Shaft—a vertical mining work that descends from the surface and is used for transport, ventilation, and other specific mine requirements. It has a circular or rectangular shape. On the surface it terminates in the mine tower;
- Adit portal—a horizontal or inclined long mining work usually excavated in sloping terrain, usually a hillside;
- Tailing pond—is a device for sedimentation of fine-grained mining waste; usually tailings mixed with water originating from the treatment of minerals from the operation, and the purified water is discharged through a drainage trough;
- Ping—a valley/depression in the terrain caused by shallow underground mining.
- Mine dump (heap/tip)—is an artificially built body for the storage of solid mining waste on the earth’s surface;
- Other types of object, e.g., “tajch” artificial water reservoirs—rainwater collection basins in hilly terrain, from which the water drove underground water-powered pumps, ore-crushing hammers and ore-washing plants, and residual water was used to drive grain mills.
- Horizontal objects with a predominant area dimension located below or on the earth’s surface (adit portals, mine dumps, tailing ponds);
- Vertical objects with a predominant depth dimension at or below the earth’s surface or ground level (shaft, ping, other object).
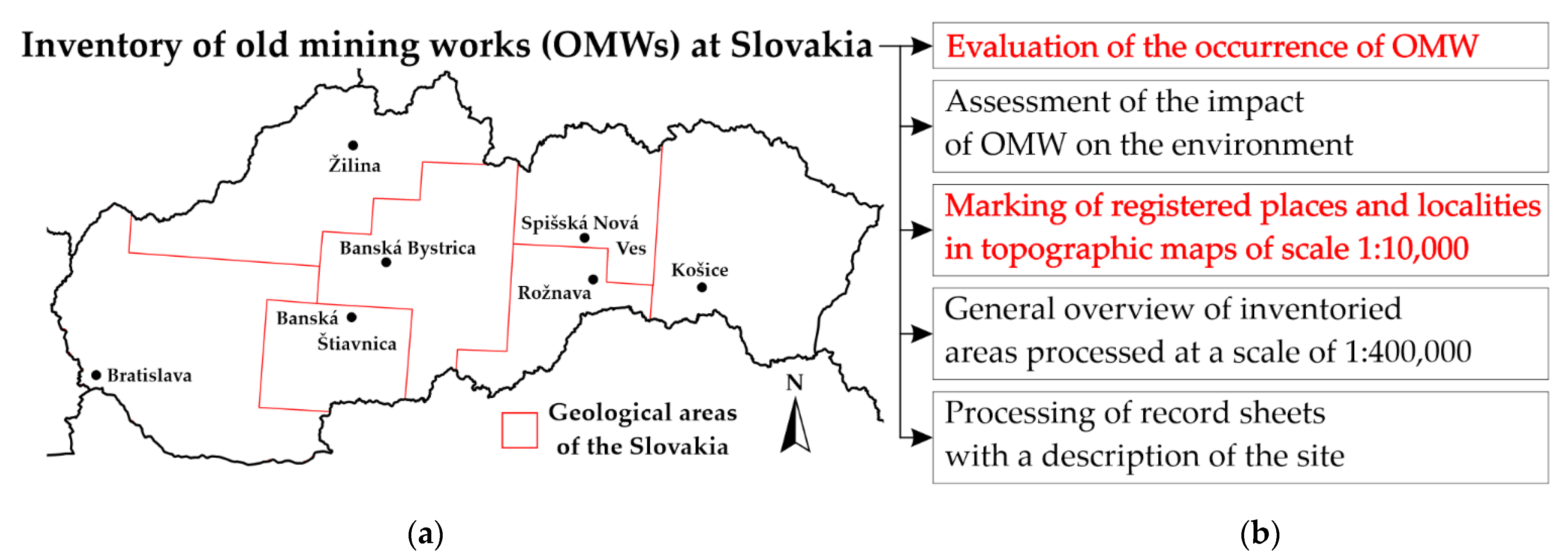
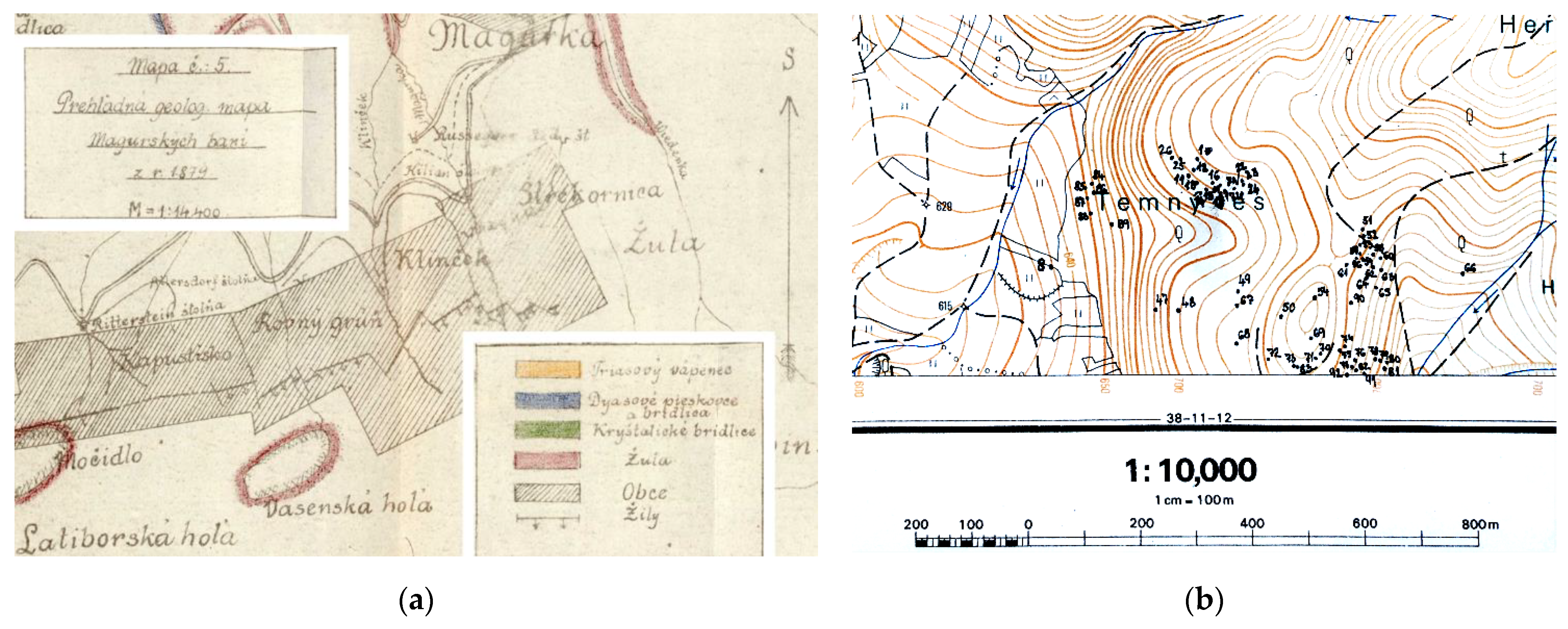
2.3. The Process of Inventorizing Old Mining Works
2.4. Data Collection for Registry of Old Mining Works and Recent Mining Works
3. Results and Discussion
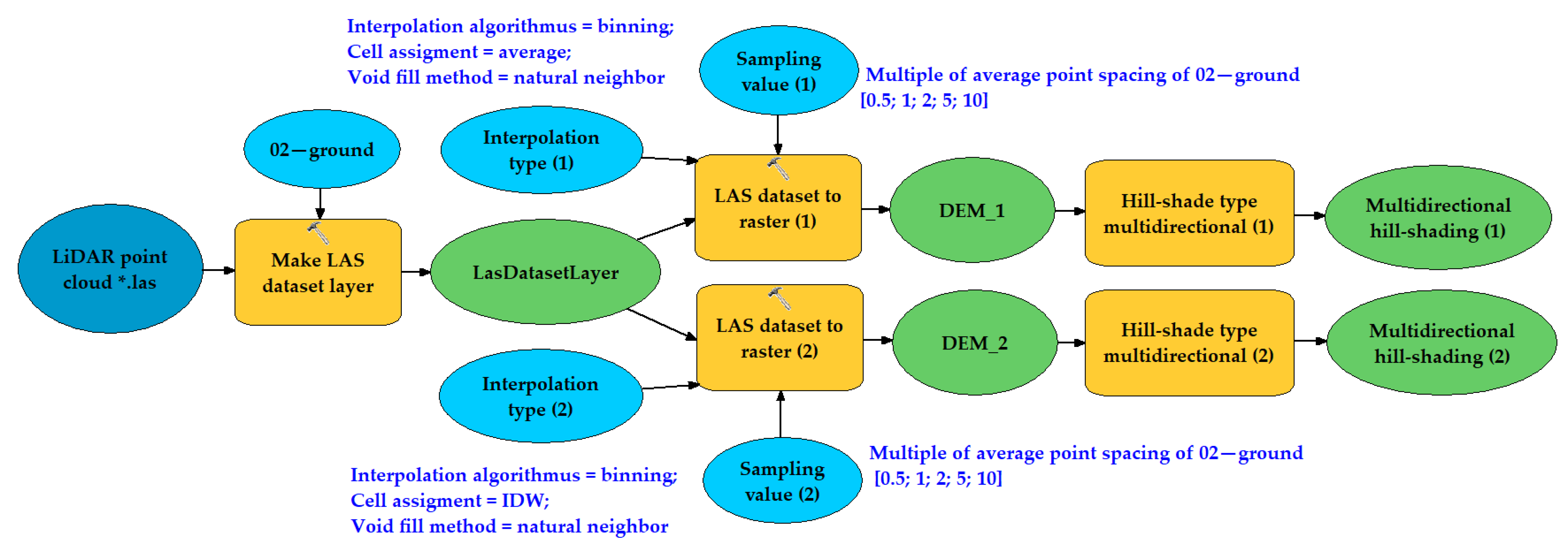
3.1. Processing of LiDAR Data to Inventorize the Spatial Distribution of Old Mining Works
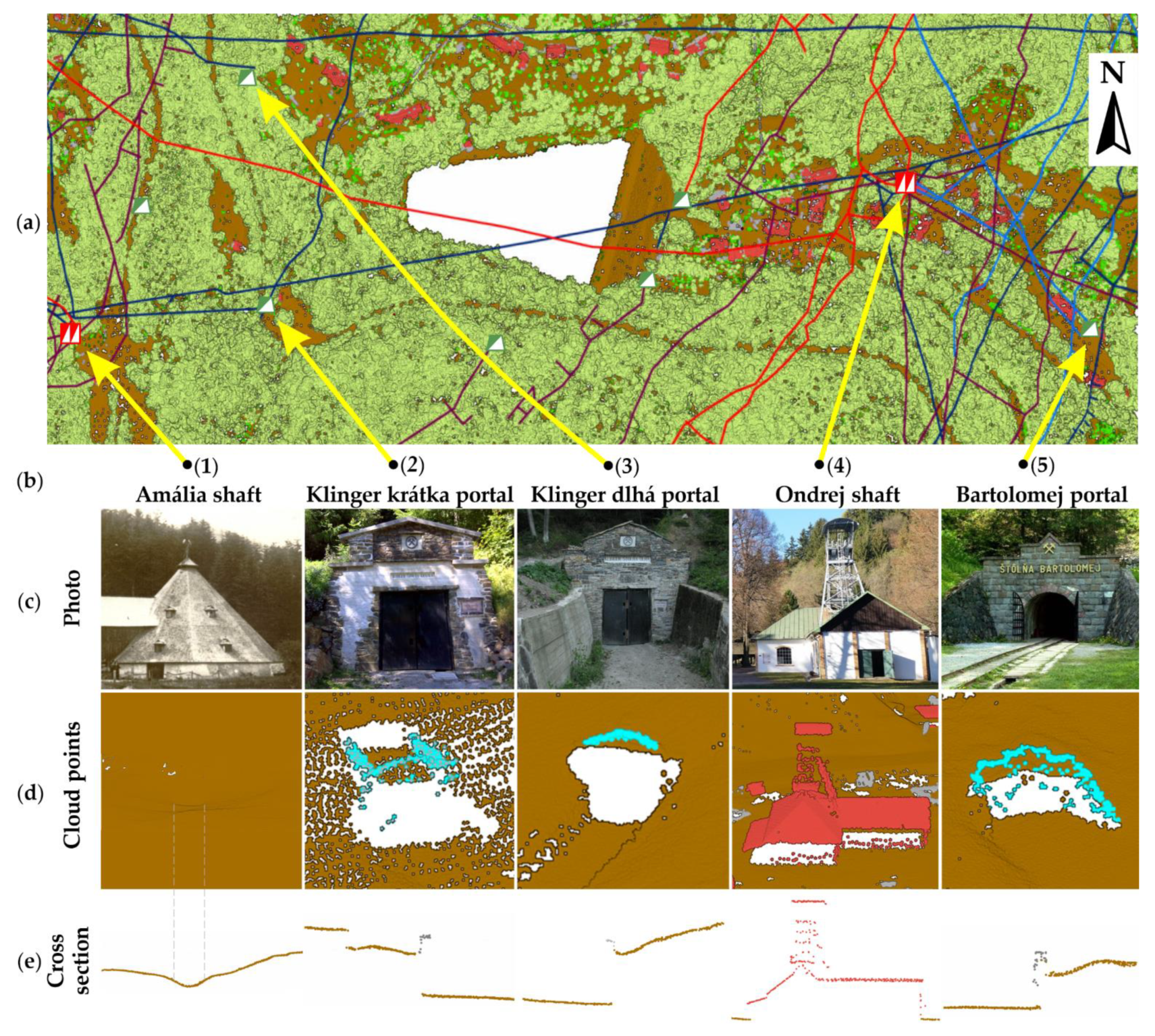
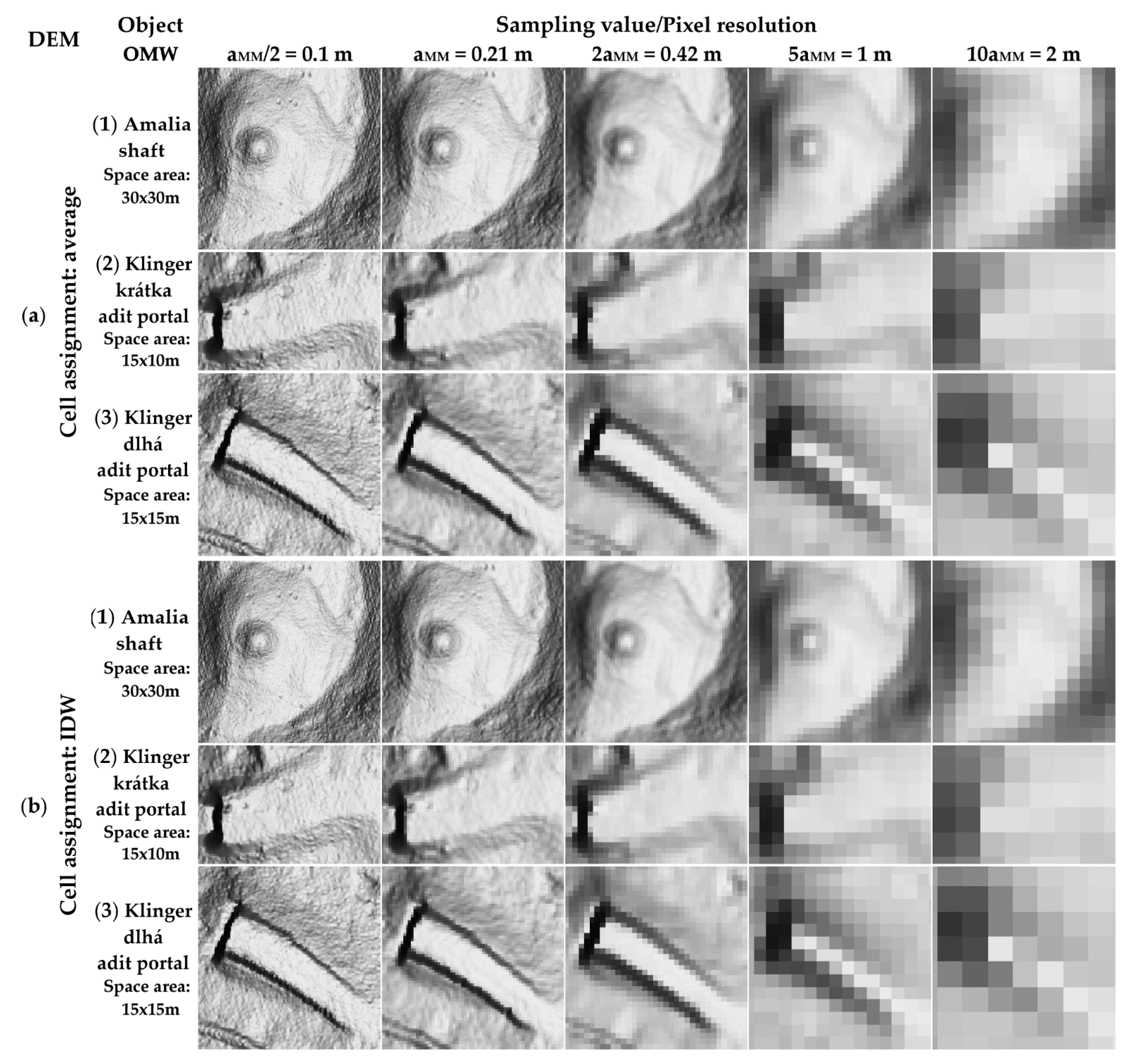
3.1.1. The First Study Area of the Mining Museum
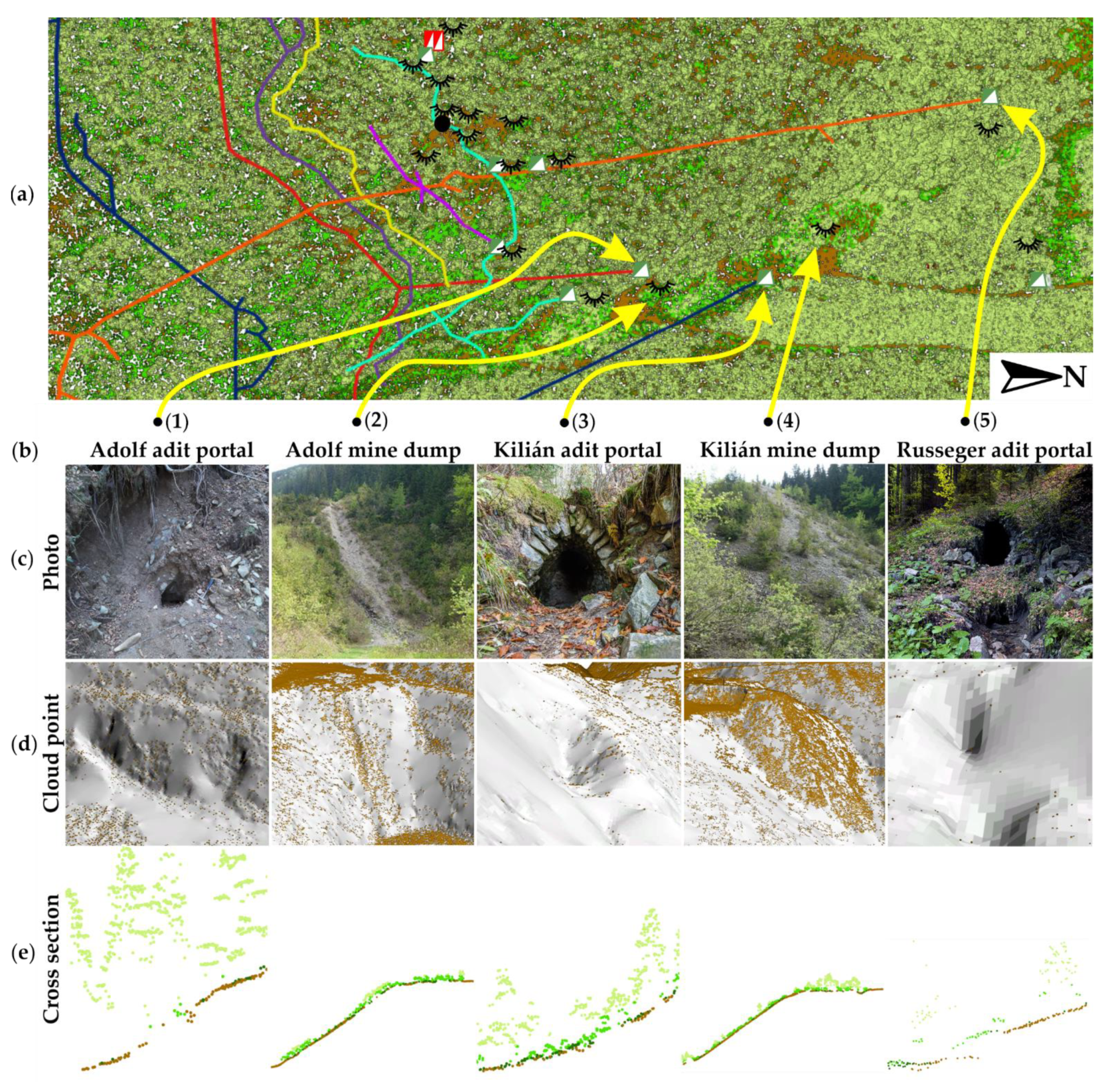
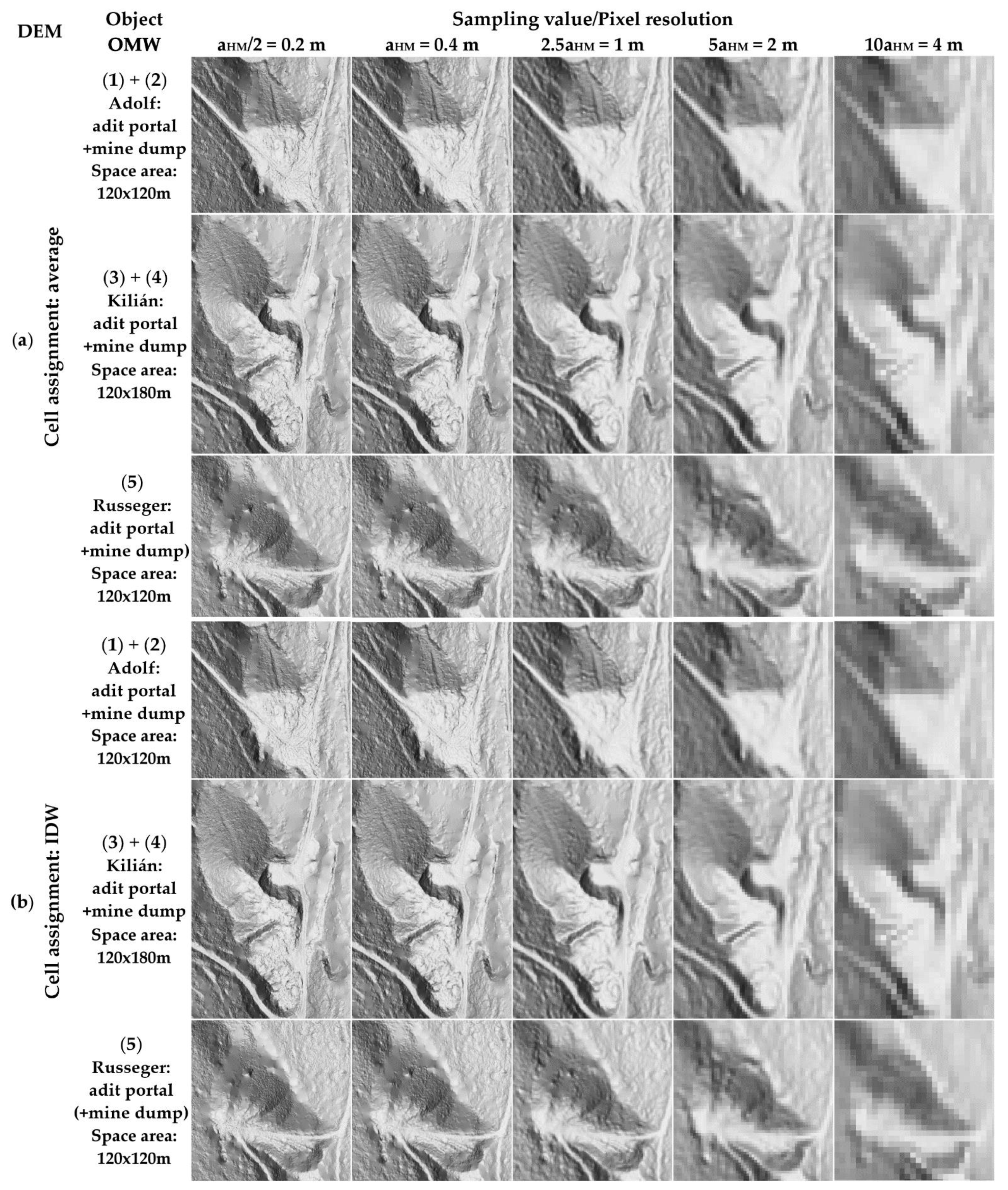
3.1.2. The Second Study Area of the Hamlet Magurka
3.2. Analysis of the Presence of OMWs Based on DEM Generated from LiDAR
3.3. Assessment of the Suitability of DEM for Identifying Objects from the Register of Old Mining Works and Recent Mining Works
- Localization of the OMW, which was drawn into the vector layer based on the digitization of the underlying map, according to the results of the field survey;
- Ambiguous access to the location of above-ground objects typologically characterized in R-OMW as a point or area (e.g., location of an adit portal or terrain notch indicating an adit portal; site of mine dump using the nearest point, or its center of gravity, or the center of the top of the embankment cone);
- Inaccuracy of the base map depending on the display scale used (on the map and in the field);
- Digitization and transformation of map data into R-OMW.
4. Conclusions
- Environmental (ecological part)—all mining works (historical or current) should be recorded in the register, because they may pose a potential threat to the environment (e.g., contaminated mining waters flowing from underground spaces directly to the Earth’s surface, or the impacts of mining on the land cover/surface—the formation of surface depressions, or collapses of mined areas or mine dumps). Based on the study results, it is possible to add new objects to the R-OMW, which may have been unregistered or abandoned until now.
- Spatial planning and land use—R-OMW serves as a basis for spatial planning authorities, as enshrined in the legislation (Paragraph 14 of Act. No. 569/2007 Coll.—use of the results of geological work in spatial planning concerning old mining works). For this reason, it is essential to have complete, accurate and reliable information in the register about the objects that constitute it. The importance of regular updating of the register data arises from the need to improve the current state of land use (remediation and monitoring of potential environmental burdens) and further use of objects in the register from the point of view of geotourism (more details in Section 2.1).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Taušová, M.; Mihaliková, E.; Čulková, K.; Stehlíková, B.; Tauš, P.; Kudelas, D.; Štrba, L.; Domaracká, L. Analysis of municipal waste development and management in self-governing regions of Slovakia. Sustainability 2020, 12, 5818. [Google Scholar] [CrossRef]
- Záviš, V.; Pristašová, Ľ.; Caudt, Ľ.; Hubač, P.; Sandanus, M.; Fodorová, V.; Hudáček, J.; Repčiak, M. Slovakia—Proposal for Remediation of Old Mining Works—Inventory, Reconnaissance Survey, as of 31/12/1996; Geologická Služba SR: Bratislava, Slovakia, 1996; p. 197. [Google Scholar]
- Bindzarova Gergelova, M.; Labant, S.; Kuzevic, S.; Kuzevicova, Z.; Pavolova, H. Identification of roof surfaces from LiDAR cloud points by GIS tools: A case study of Lucenec, Slovakia. Sustainability 2020, 12, 6847. [Google Scholar] [CrossRef]
- Bindzarova Gergelova, M.; Kuzevicova, Z.; Labant, S.; Kuzevic, S.; Bobikova, D.; Mizak, J. Roof’s Potential and Suitability for PV Systems Based on LiDAR: A Case Study of Komárno, Slovakia. Sustainability 2020, 12, 10018. [Google Scholar] [CrossRef]
- Pukanská, K.; Bartoš, K.; Sabová, J. Comparison of survey results of the surface quarry Spišské Tomášovce by the use of photogrammetry and terrestrial laser scanning. Inz. Miner. 2014, 15, 47–54. [Google Scholar]
- Zebedin, L.; Klaus, A.; Gruber-Geymayer, B.; Karner, K. Towards 3D map generation from digital aerial images. ISPRS J. Photogramm. Remote Sens. 2006, 60, 413–427. [Google Scholar] [CrossRef]
- Tompalski, P.; White, J.C.; Coops, N.C.; Wulder, M.A. Quantifying the contribution of spectral metrics derived from digital aerial photogrammetry to area-based models of forest inventory attributes. Remote Sens. Environ. 2019, 234, 111434. [Google Scholar] [CrossRef]
- Pearse, G.D.; Dash, J.P.; Persson, H.J.; Watt, M.S. Comparison of high-density LiDAR and satellite photogrammetry for forest inventory. ISPRS J. Photogramm. Remote Sens. 2018, 142, 257–267. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, W.; Chen, L. Constructing DEM Based on InSAR and the Relationship between InSAR DEM’s Precision and Terrain Factors. Energy Procedia 2012, 16, 184–189. [Google Scholar] [CrossRef] [Green Version]
- White, J.C.; Woods, M.; Krahn, T.; Papasodoro, C.; Bélanger, D.; Onafrychuk, C.; Sinclair, I. Evaluating the capacity of single photon lidar for terrain characterization under a range of forest conditions. Remote Sens. Environ. 2021, 252, 112169. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komárek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Sharma, M.; Garg, R.D.; Badenko, V.; Fedotov, A.; Min, L.; Yao, A. Potential of airborne LiDAR data for terrain parameters extraction. Quat. Int. 2021, 575–576, 317–327. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of topographie variability and lidar sampling density on several DEM interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef] [Green Version]
- Castillo, C.; Taguas, E.V.; Zarco-Tejada, P.; James, M.R.; Gómez, J.A. The normalized topographic method: An automated procedure for gully mapping using GIS. Earth Surf. Process. Landf. 2014, 39, 2002–2015. [Google Scholar] [CrossRef]
- Pánek, T.; Břežný, M.; Kapustová, V.; Lenart, J.; Chalupa, V. Large landslides and deep-seated gravitational slope deformations in the Czech Flysch Carpathians: New LiDAR-based inventory. Geomorphology 2019, 346, 106852. [Google Scholar] [CrossRef]
- Zhu, J.; Pierskalla, W.P. Applying a weighted random forests method to extract karst sinkholes from LiDAR data. J. Hydrol. 2016, 533, 343–352. [Google Scholar] [CrossRef]
- Hofierka, J.; Gallay, M.; Bandura, P.; Šašak, J. Identification of karst sinkholes in a forested karst landscape using airborne laser scanning data and water flow analysis. Geomorphology 2018, 308, 265–277. [Google Scholar] [CrossRef]
- Doyle, T.B.; Woodroffe, C.D. The application of LiDAR to investigate foredune morphology and vegetation. Geomorphology 2018, 303, 106–121. [Google Scholar] [CrossRef]
- Stereńczak, K.; Ciesielski, M.; Bałazy, R.; Zawiła-Niedźwiecki, T. Comparison of various algorithms for DTM interpolation from LIDAR data in dense mountain forests. Eur. J. Remote Sens. 2016, 49, 599–621. [Google Scholar] [CrossRef]
- Bater, C.W.; Coops, N.C. Evaluating error associated with lidar-derived DEM interpolation. Comput. Geosci. 2009, 35, 289–300. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Airborne Laser Scanning in forested areas–potential and limitations of an archaeological prospection technique. Remote Sens. Archaeol. Herit. Manag. 2011, 5, 59–76. [Google Scholar]
- John, J.; Gojda, M. Principles of airborne laser scanning and its use for archaeological remote survey. In Archaeology and Airborne Laser Scanning of the Landscape; Katedra Archeologie Západočeská Univerzita v Plzni: Plzeň, Czech Republic, 2013; pp. 8–20. [Google Scholar]
- Fisher, C.T.; Cohen, A.S.; Fernández-Diaz, J.C.; Leisz, S.J. The application of airborne mapping LiDAR for the documentation of ancient cities and regions in tropical regions. Quat. Int. 2017, 448, 129–138. [Google Scholar] [CrossRef]
- Luo, L.; Wang, X.; Guo, H.; Lasaponara, R.; Zong, X.; Masini, N.; Wang, G.; Shi, P.; Khatteli, H.; Chen, F.; et al. Airborne and spaceborne remote sensing for archaeological and cultural heritage applications: A review of the century (1907–2017). Remote Sens. Environ. 2019, 232, 111280. [Google Scholar] [CrossRef]
- Bollandsås, O.M.; Risbøl, O.; Ene, L.T.; Nesbakken, A.; Gobakken, T.; Næsset, E. Using airborne small-footprint laser scanner data for detection of cultural remains in forests: An experimental study of the effects of pulse density and DTM smoothing. J. Archaeol. Sci. 2012, 39, 2733–2743. [Google Scholar] [CrossRef]
- Gresova, E.; Svetlik, J. Modeling within national economy using industry-oriented indicators: Evidence from Czech Republic. MM Science Journal. 2020, 2020, 3892–3895. [Google Scholar] [CrossRef]
- Sombathy, E.; Kúšik, D.; Mižák, J. Slovak Mining Road. Slovak Geol. Mag. 2018, 1, 83–106. [Google Scholar]
- Šoltés, S.; Kúšik, D.; Mižák, J. Register of old workings and their web-based application. Miner. Slovaca 2010, 4, 522–524. [Google Scholar]
- Kašiarová, E. Banícka a Hutnícka Minulosť Slovenska v Kartografických Pamiatkach, 1st ed.; Ing. Tibor Turčan—Banská Agentúra; Zväz Hutníctva, ťažobného Priemyslu a Geológie Slovenskej Republiky: Košice, Slovakia, 2010; p. 191. [Google Scholar]
- Ovesná, G.; Staňková, H.; Plánka, L.; Wlochová, A. The history of mine surveying and mining maps. Geod. Cartogr. 2017, 43, 118–123. [Google Scholar] [CrossRef] [Green Version]
- Maková, A. Prieskum a reštaurovanie najstaršej banskej mapy HKG. In Proceedings of the Historické Mapy, Kartografická spoločnosť SR, Bratislava, Slovakia, 24 October 2013; pp. 91–98. [Google Scholar]
- RIEGL LMS-Q780. Available online: www.riegl.com/uploads/tx_pxpriegldownloads/DataSheet_LMS-Q780_2015-03-24.pdf (accessed on 11 March 2021).
- Juhász, L.; Hochmair, H.H. OSM Data Import as an Outreach Tool to Trigger Community Growth? A Case Study in Miami. ISPRS Int. J. Geo-Inf. 2018, 7, 113. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Nearing, M.A.; Nichols, M.H.; Polyakov, V.O.; Phillip Guertin, D.; Cavanaugh, M.L. The effects of DEM interpolation on quantifying soil surface roughness using terrestrial LiDAR. Soil Tillage Res. 2020, 198, 104520. [Google Scholar] [CrossRef]
- Cățeanu, M.; Ciubotaru, A. The effect of lidar sampling density on DTM accuracy for areas with heavy forest cover. Forests 2021, 12, 265. [Google Scholar] [CrossRef]
- Langridge, R.M.; Ries, W.F.; Farrier, T.; Barth, N.C.; Khajavi, N.; De Pascale, G.P. Developing sub 5-m LiDAR DEMs for forested sections of the Alpine and Hope faults, South Island, New Zealand: Implications for structural interpretations. J. Struct. Geol. 2014, 64, 53–66. [Google Scholar] [CrossRef]
- Shi, W.; Deng, S.; Xu, W. Extraction of multi-scale landslide morphological features based on local Gi* using airborne LiDAR-derived DEM. Geomorphology 2018, 303, 229–242. [Google Scholar] [CrossRef]
- Sofia, G. Combining geomorphometry, feature extraction techniques and Earth-surface processes research: The way forward. Geomorphology 2020, 355, 107055. [Google Scholar] [CrossRef]
- Veronesi, F.; Hurni, L. A GIS tool to increase the visual quality of relief shading by automatically changing the light direction. Comput. Geosci. 2015, 74, 121–127. [Google Scholar] [CrossRef]
- Wang, Y.H.; Tseng, Y.H. Raster mapping of topographic parameters derived from high resolution Digital Elevation Models. In Proceedings of the ACRS 2015—36th Asian Conference on Remote Sensing, Fostering Resilient Growth in Asia, Quezon City, Philippines, 24–28 October 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Objects Symbols | Type of Object | Classification Codes | Number of Objects |
|---|---|---|---|---|
| 1 |  | shaft—mine tower | 06—buildings | 525 |
| 2 | adit portal—adit entrance | 01—unassigned, 02—ground | 5333 | |
| 3 | tailing pond | 02—ground | 50 | |
| 4 | ping, ping move | 02—ground | 3881 | |
| 5 | mine dump | 02—ground | 6377 | |
| 6 | other type of object | 01—unassigned, 02—ground | 543 |
| Selected Areas of the Case Study | I | II | ||
|---|---|---|---|---|
| LOT number | 12 | 24 | ||
| LOT name | Banská Štiavnica | Mining Museum (MM) | Low Tatras | Hamlet Magurka (HM) |
| Cadastre unit | Banská Štiavnica | Partizánska Ľupča | ||
| Area | 1200 km2 | 0.303 km2 | 1154 km2 | 1.998 km2 |
| Total points | 98,370,602,256 | 22,531,911 | 50,374,348,935 | 66,855,109 |
| Average point density | 82.0 | 74.4 | 43.7 | 33.5 |
| Average point spacing | 0.11 m | 0.12 m | 0.15 m | 0.17 m |
| Number of points class 02—ground | 40,825,347,864 | 6,859,436 | 12,141,129,161 | 12,481,531 |
| Average point density | 34.0 | 22.6 | 10.5 | 6.2 |
| Average point spacing | 0.17 m | 0.21 m | 0.31 | 0.40 m |
| Vertical accuracy in ETRS89-h | 0.04 m | 0.05 m | ||
| Positional accuracy in ETRS89-TM34 | 0.13 m | 0.10 m | ||
| Coordinate reference system | D-UTCN implemented by UTCN03/Krovak East North (EPSG: 8353) | |||
| Vertical reference system | Baltic vertical datum—after adjustment | |||
| No. | ID No. R-OMW 36-33-09 | OMW (Table 1) | R-OMW | Lidar to R-OMW | Lidar to OSM | R-OMW to OSM | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Sym | Name | Size [m] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | ||
| 1 | 0234 |  | Klinger Dlhá | - | 6.42 | 227.6 | - | - | - | - |
| 2 | 0238 |  | Ondrej | - | 16.79 | 250.3 | 1.07 | 223.9 | 15.84 | 72.0 |
| 3 | 0242 | | Amália | - | 75.05 | 169.1 | - | - | - | - |
| 4 | 0243 | | Klinger Krátka | - | 4.44 | 53.2 | - | - | - | - |
| 5 | 0247 | | Bartolomej | - | 35.02 | 136.1 | 1.32 | 312.2 | 36.34 | 316.0 |
| Average | 27.54 | 1.20 | 26.09 | |||||||
| No. | ID No. R-OMW | OMW (Table 1) | R-OMW | GNSS to R-OMW | GNSS to OSM | GNSS to LiDAR | Lidar to R-OMW | LiDAR to OSM | R-OMW to OSM | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 36-21-12 | Sym | Name | Size [m] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | |
| 1 | 0063 | | Ritterstein | 1 × 8 | 95.90 | 6.0 | 7.64 | 148.0 | 1.01 | 152.6 | 96.74 | 5.7 | 6.64 | 147.2 | 102.02 | 183.4 |
| 2 | 0080 | | Adolf | 4 × 10 | 16.01 | 320.0 | 19.42 | 11.5 | - | - | - | - | - | - | 15.70 | 64.5 |
| 3 | 0084 | | Kilián | 2 × 2 | 23.01 | 213.5 | 17.17 | 265.7 | 0.87 | 277.3 | 22.64 | 211.5 | 16.32 | 265.1 | 18.45 | 346.1 |
| 4 | 0191 | | Russeger | 2 × 2 | 21.75 | 261.5 | 11.72 | 295.6 | 1.29 | 56.7 | 22.89 | 260.2 | 12.41 | 290.7 | 13.73 | 52.8 |
| Average | 39.17 | 13.99 | 1.06 | 47.42 | 11.84 | 37.48 | ||||||||||
| No. | ID No. R-OMW | OMW (Table 1) | R-OMW | LiDAR to R-OMW | LiDAR to OSM | R-OMW to OSM | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 36-21-12 | Sym | Name | Size [m] | ΔP [m] | A [°] | ΔP [m] | A [°] | ΔP [m] | A [°] | |
| 1 | 0065 | | No name | 2 × 10 | 70.75 | 319.8 | 8.53 | 199.5 | 75.41 | 145.4 |
| 2 | 0082 | | Magurka | 3 × 15 | 70.84 | 333.1 | 43.94 | 50.2 | 74.53 | 118.0 |
| 3 | 0097 | | No name | 2 × 2 | 24.92 | 122.7 | 15.71 | 37.2 | 28.41 | 336.2 |
| 4 | 0127 | | No name | 2 × 5 | 18.16 | 190.5 | 39.00 | 104.4 | 41.87 | 78.8 |
| 5 | 0144 | | No name | 4 × 7 | 16.67 | 189.6 | - | - | - | - |
| 6 | 0156 | | No name | 3 × 3 | 15.55 | 196.0 | - | - | - | - |
| 7 | 0158 | | No name | 1 × 10 | 18.65 | 336.9 | - | - | - | - |
| 8 | 0160 | | No name | 2 × 10 | 45.51 | 276.3 | 12.92 | 341.7 | 41.82 | 80.0 |
| 9 | 0177 | | No name | 3 × 6 | 13.12 | 62.4 | - | - | - | - |
| 10 | 0187 | | Frantíšek Dolná | 2 × 8 | 35.92 | 300.7 | 29.10 | 339.9 | 22.76 | 66.7 |
| 11 | 0189 | | Frantíšek Horná | 2 × 6 | 28.21 | 22.0 | 8.08 | 34.7 | 20.41 | 197.0 |
| Average | 32.57 | 22.47 | 43.60 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bindzarova Gergelova, M.; Labant, S.; Mizak, J.; Sustek, P.; Leicher, L. Inventory of Locations of Old Mining Works Using LiDAR Data: A Case Study in Slovakia. Sustainability 2021, 13, 6981. https://0-doi-org.brum.beds.ac.uk/10.3390/su13126981
Bindzarova Gergelova M, Labant S, Mizak J, Sustek P, Leicher L. Inventory of Locations of Old Mining Works Using LiDAR Data: A Case Study in Slovakia. Sustainability. 2021; 13(12):6981. https://0-doi-org.brum.beds.ac.uk/10.3390/su13126981
Chicago/Turabian StyleBindzarova Gergelova, Marcela, Slavomir Labant, Jozef Mizak, Pavel Sustek, and Lubomir Leicher. 2021. "Inventory of Locations of Old Mining Works Using LiDAR Data: A Case Study in Slovakia" Sustainability 13, no. 12: 6981. https://0-doi-org.brum.beds.ac.uk/10.3390/su13126981