
Sustainability Aspects of Energy Conversion in Modern High-Speed Trains with Traction Induction Motors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
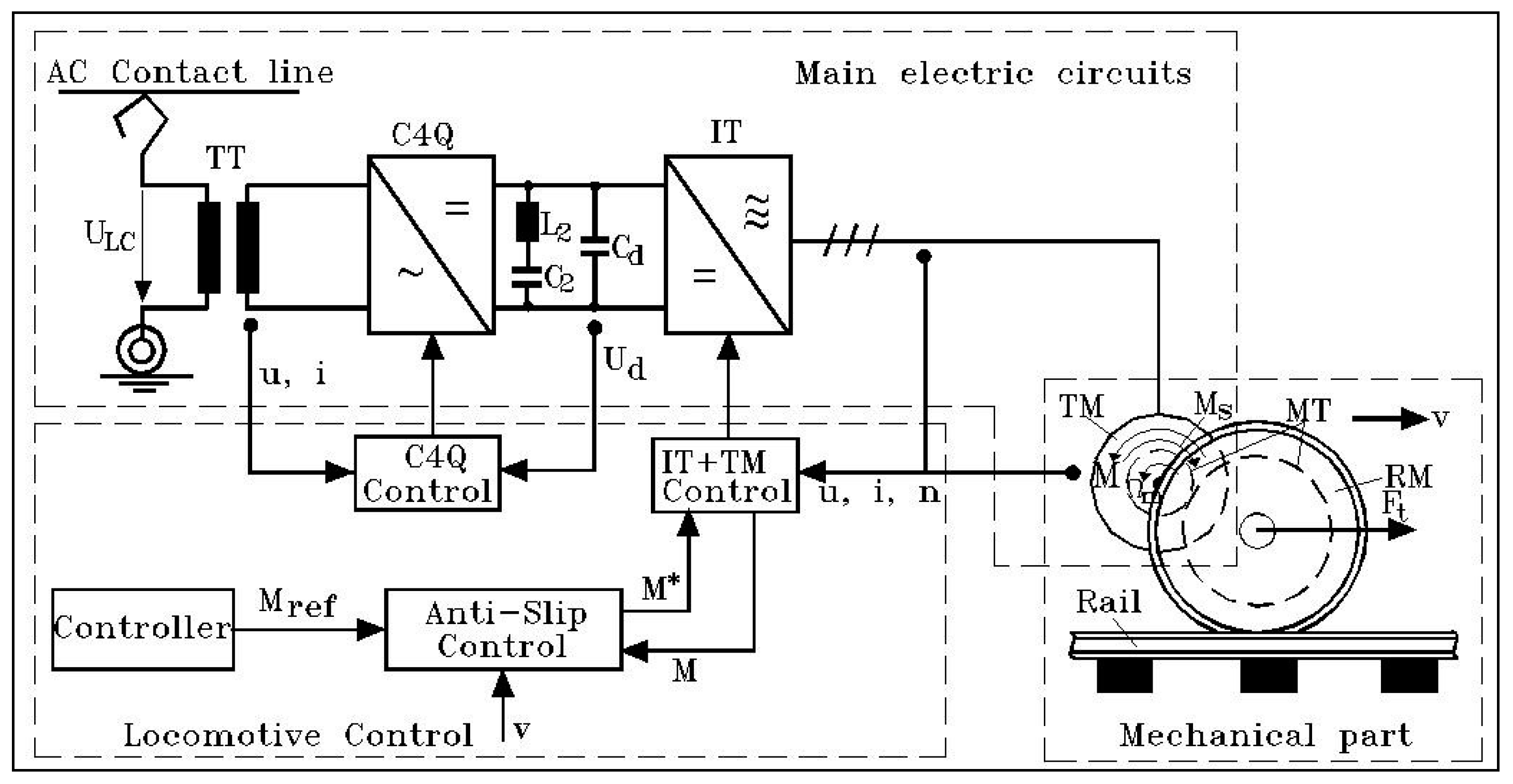
- the main electric circuits, which include the traction transformer (TT), the contact line side-converter (of type C4Q), a resonant filter L2C2, the machine-side converter (IT) and the electromagnetic part of the traction induction motor (TM);
- the mechanical portion, which includes the mechanical part of the traction induction motor and mechanical transmission (TM) from the electric motor to the motor wheel (RM); and
- the locomotive control system, which includes the line-side converter control subsystem, the control subsystem of the voltage-source inverter + traction induction motor assembly (IT + TM) and the anti-slip control subsystem.

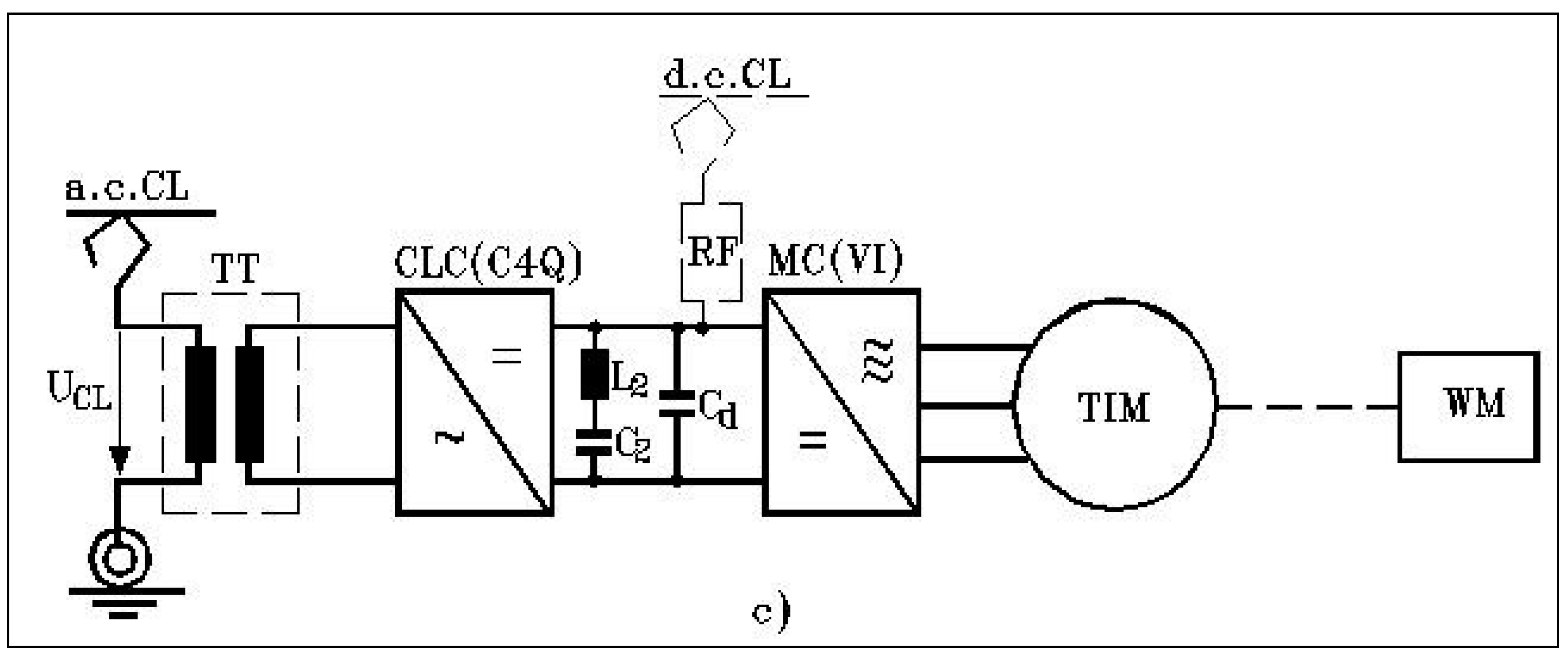
- a single-stage energy conversion (see Figure 2a), when solely the presence of the (MC) is imposed; this situation is met in case of the vehicles supplied by a d.c. contact line;
- a two-stage energy conversion (see Figure 2b,c), when both the contact line-side converter (CLC) and the machine-side converter MC are necessary.


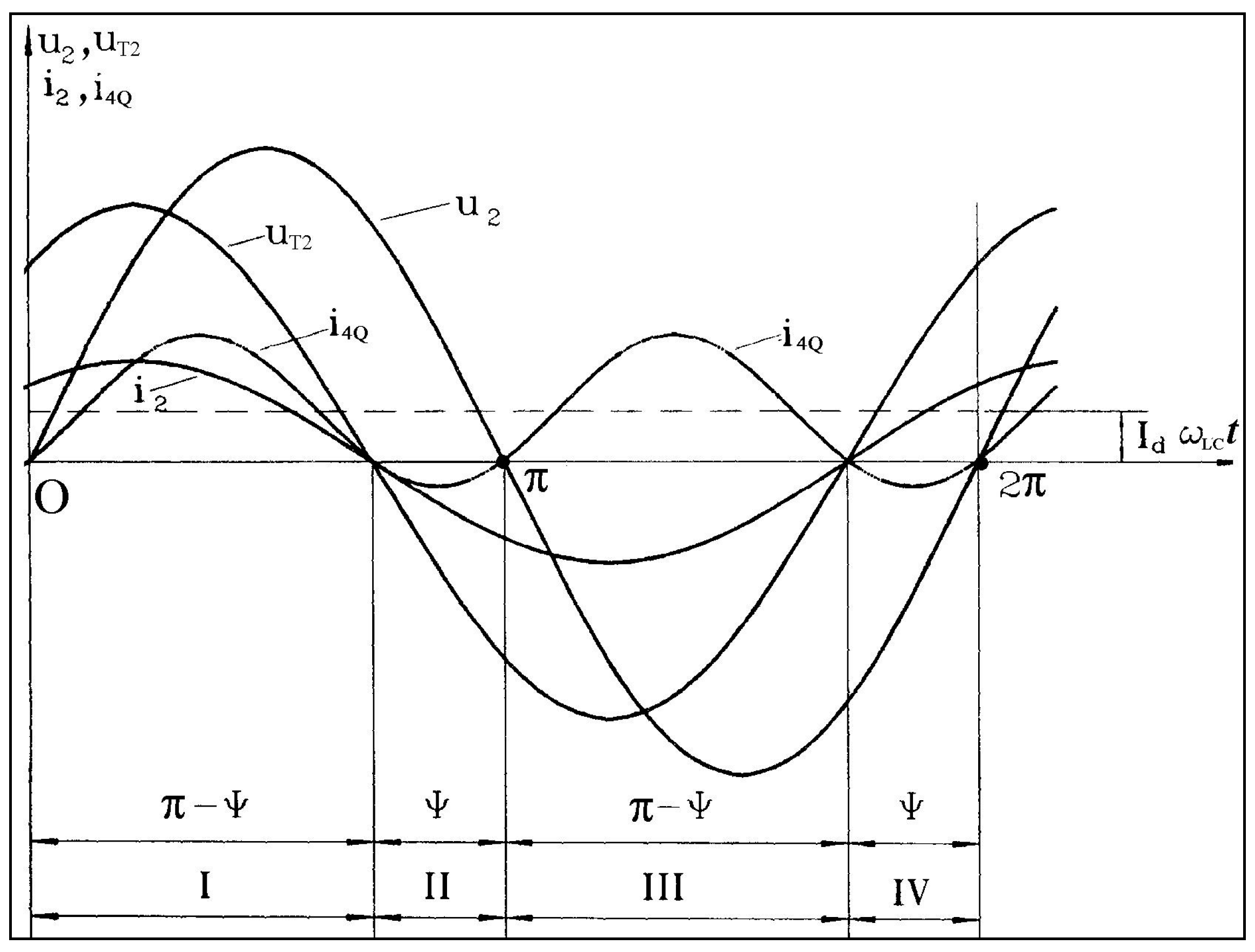
2. Sustainable Operation of a.c. Contact Line-Side Converter C4Q
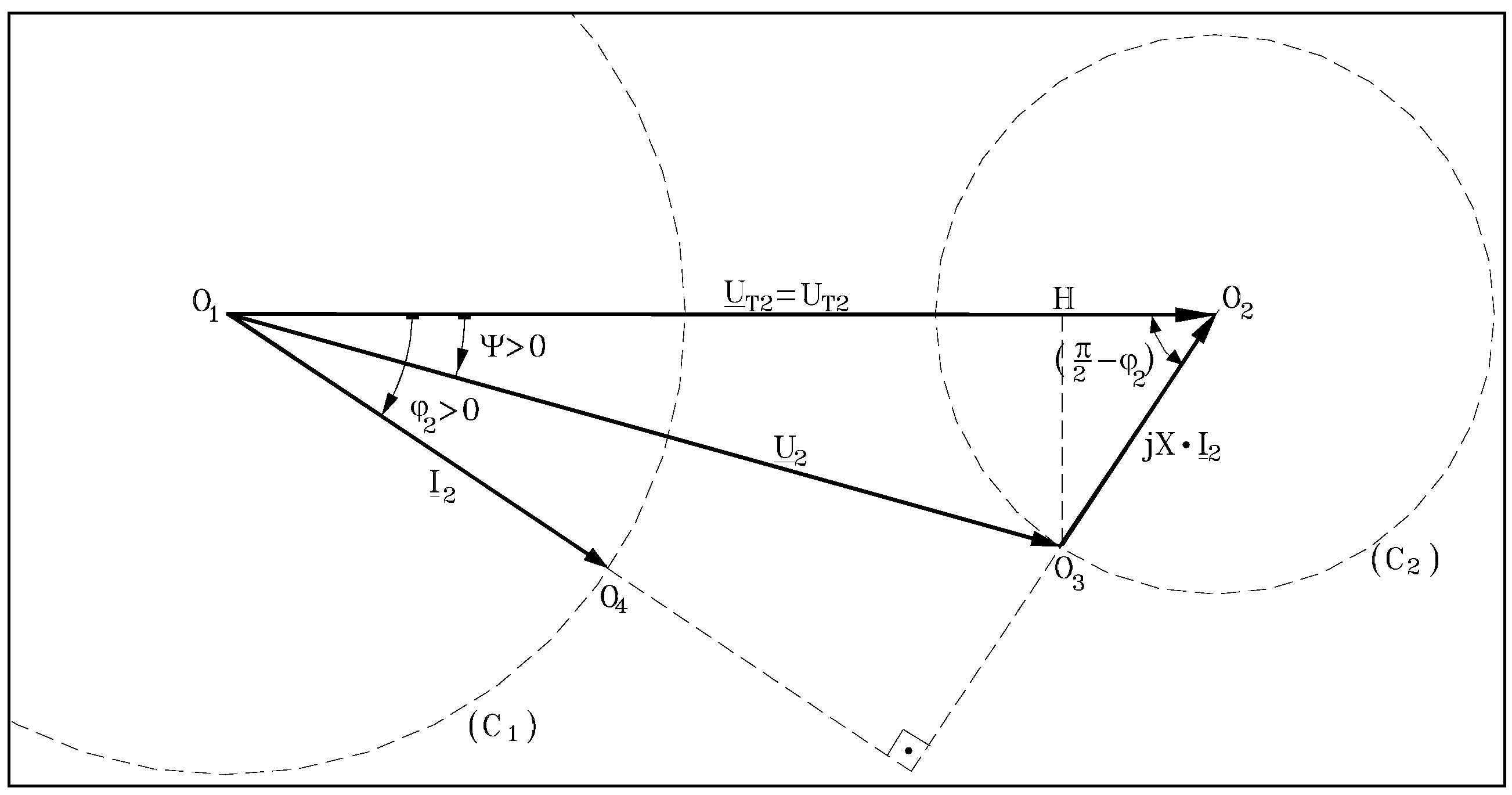
- To absorb from/give to the contact line a current with negligible harmonics’ content (meaning nearly sinusoidal), whose fundamental must be in phase/opposite phase with the contact line voltage, ensuring a power factor cosφ ≈ 1 (in the traction regime) and cosφ ≈ −1 (in the braking regime), and
- In traction regime, to absorb from the contact line pulsating electric power and to provide to the VVVF inverter (the machine-side converter) direct electric power (and the reverse in recuperative braking regime).


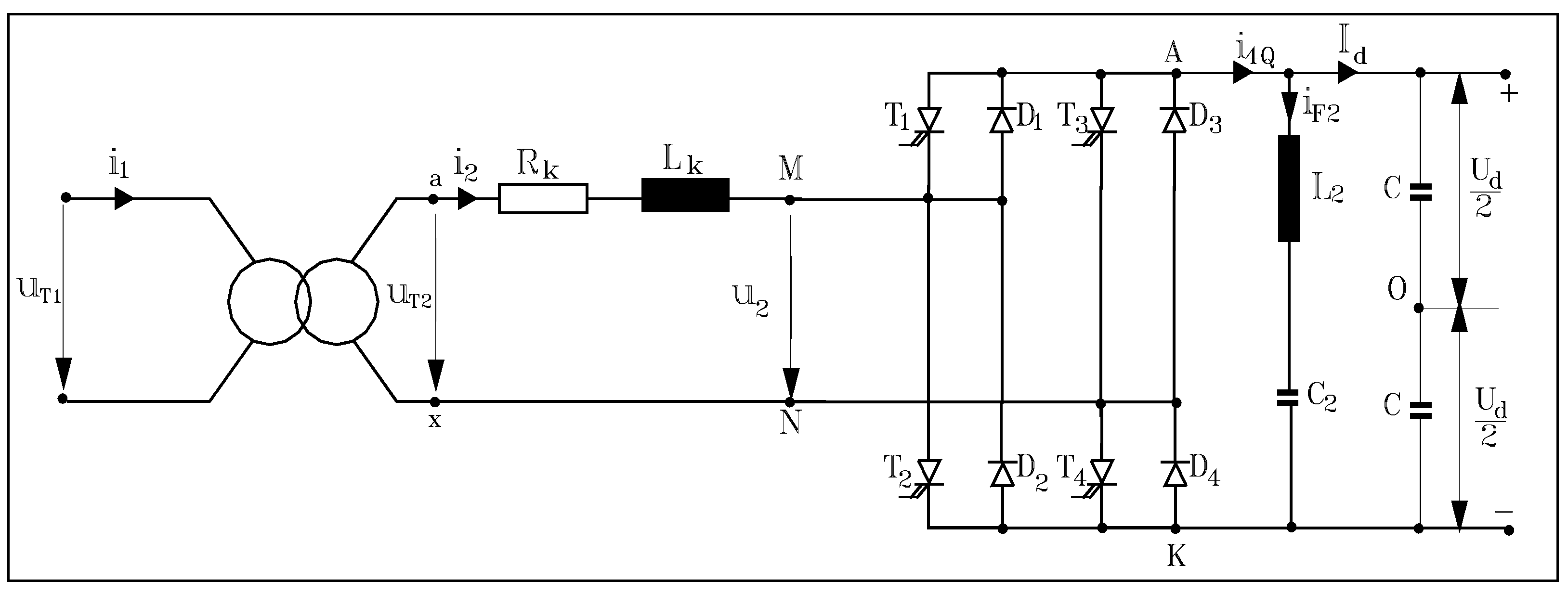
- Operation as a rectifier with cosφ1 ≈ cosφ2 = 1 (in the traction regime), and
- Operation as an inverter with cosφ1 ≈ cosφ2 = −1 (in the braking regime).

- a constant component with magnitude Id, where:
- an alternating component iF2 (with harmonic variation in time) by pulsation 2·ωLC and r.m.s. value IF2, where:

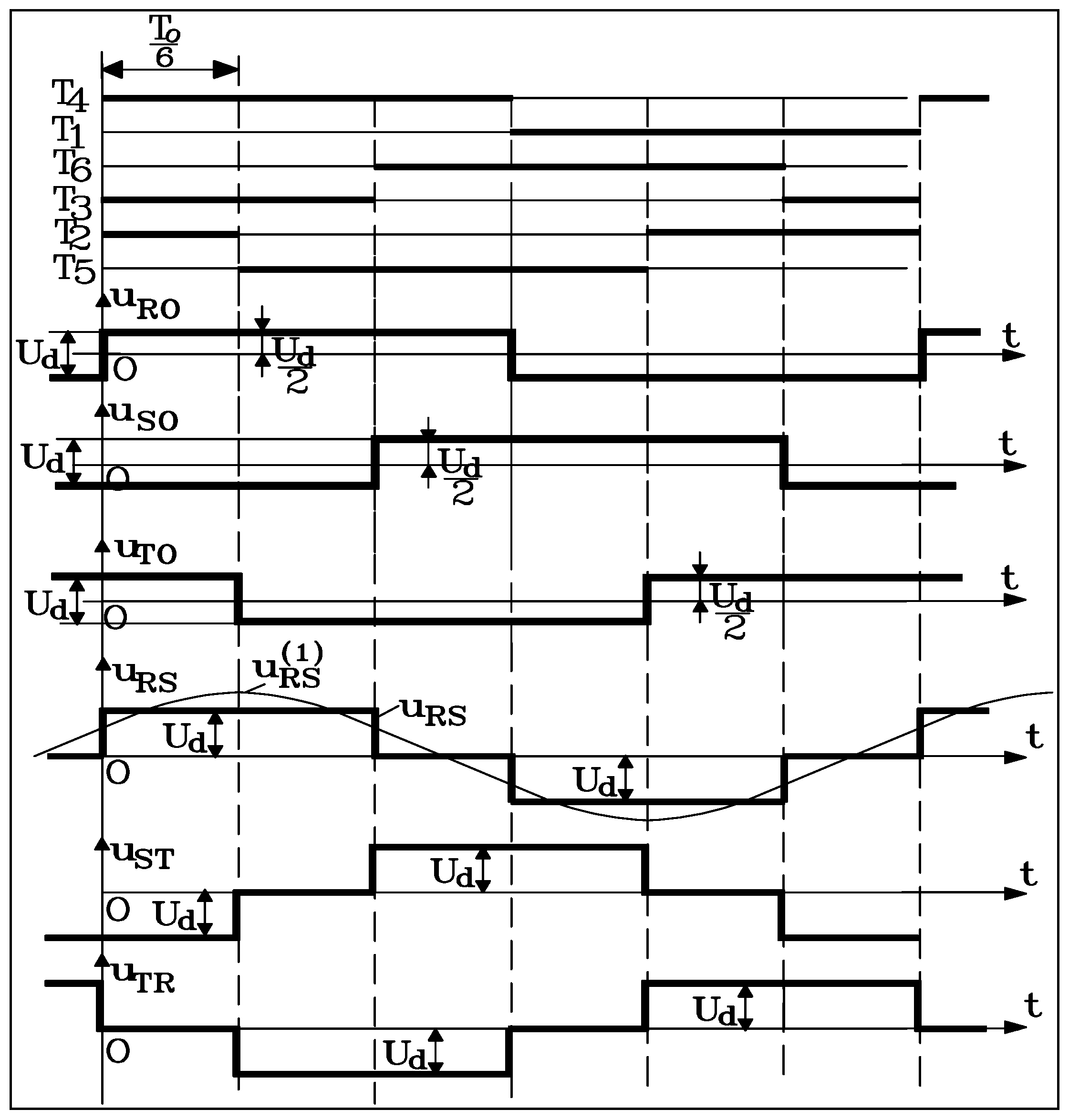
3. Machine-Side Converter of Type VVVF Inverter

- if Tc = T0, the inverter will operate in full wave (rectangular form);
- if Tc < T0, the inverter will operate in width modulation regime of voltage pulses.

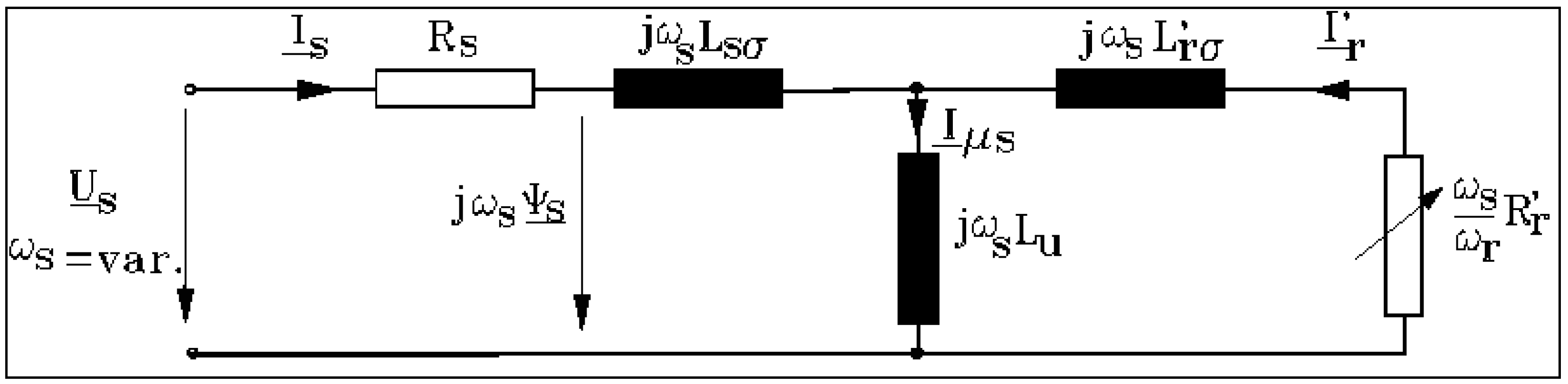
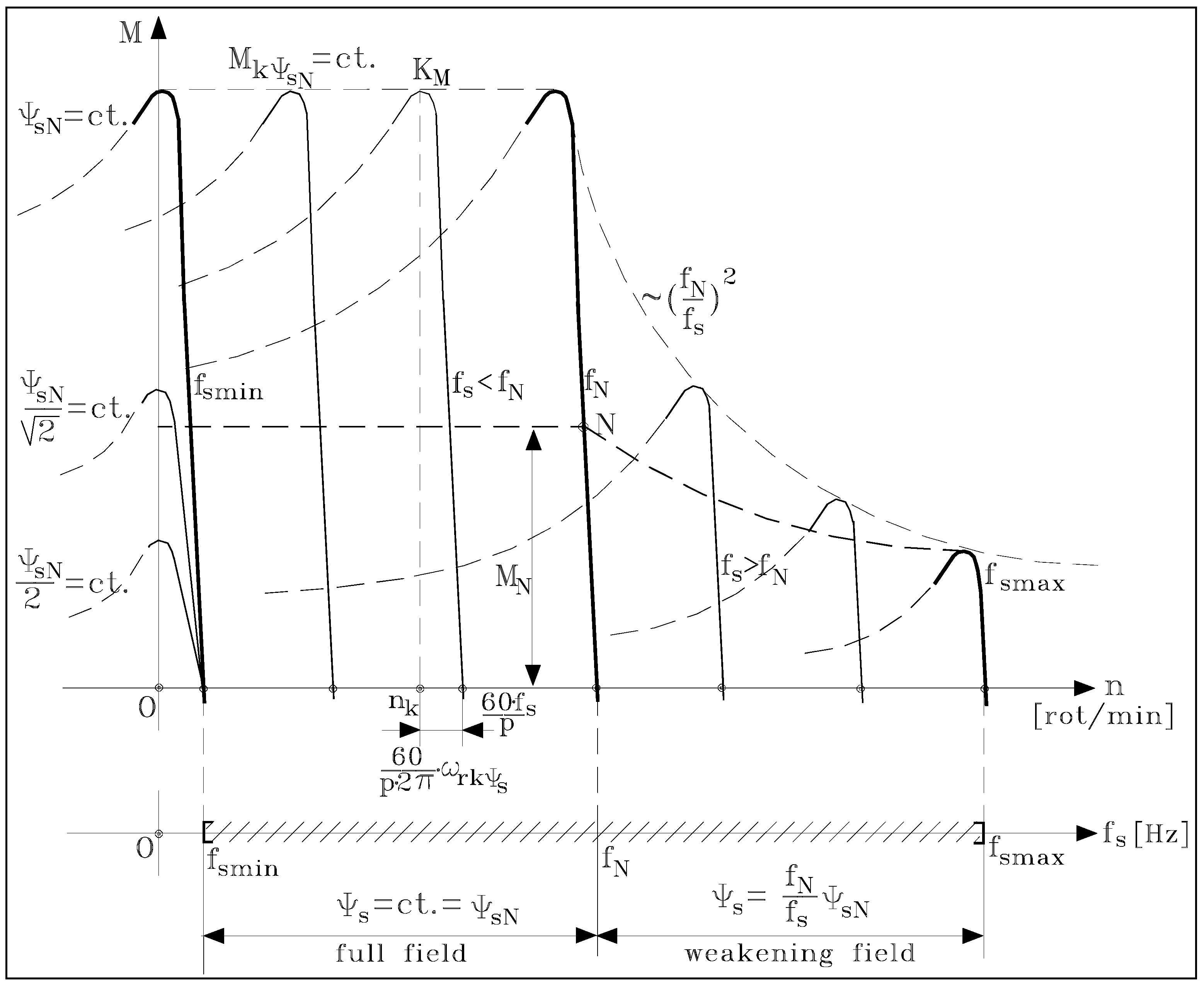
4. Sustainable Operation of Traction Induction Machine at Variable Frequency
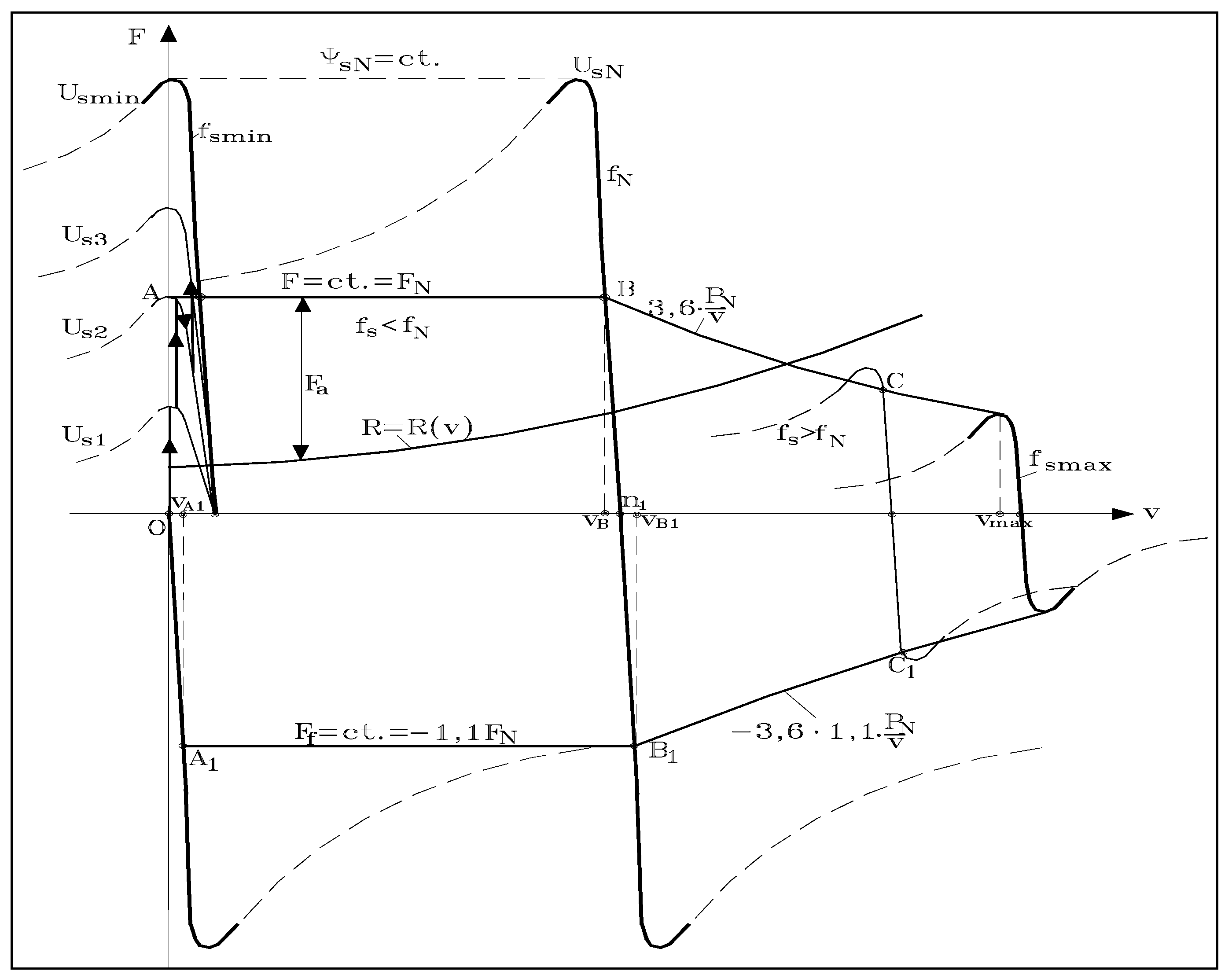
- high torque at low speed, including at the vehicle starting regime; and
- sustainable operation in a large range of supply frequency variation, from roughly 1–3 Hz up to 140–180 Hz, both in motor regime and in electric brake regime (as a generator).

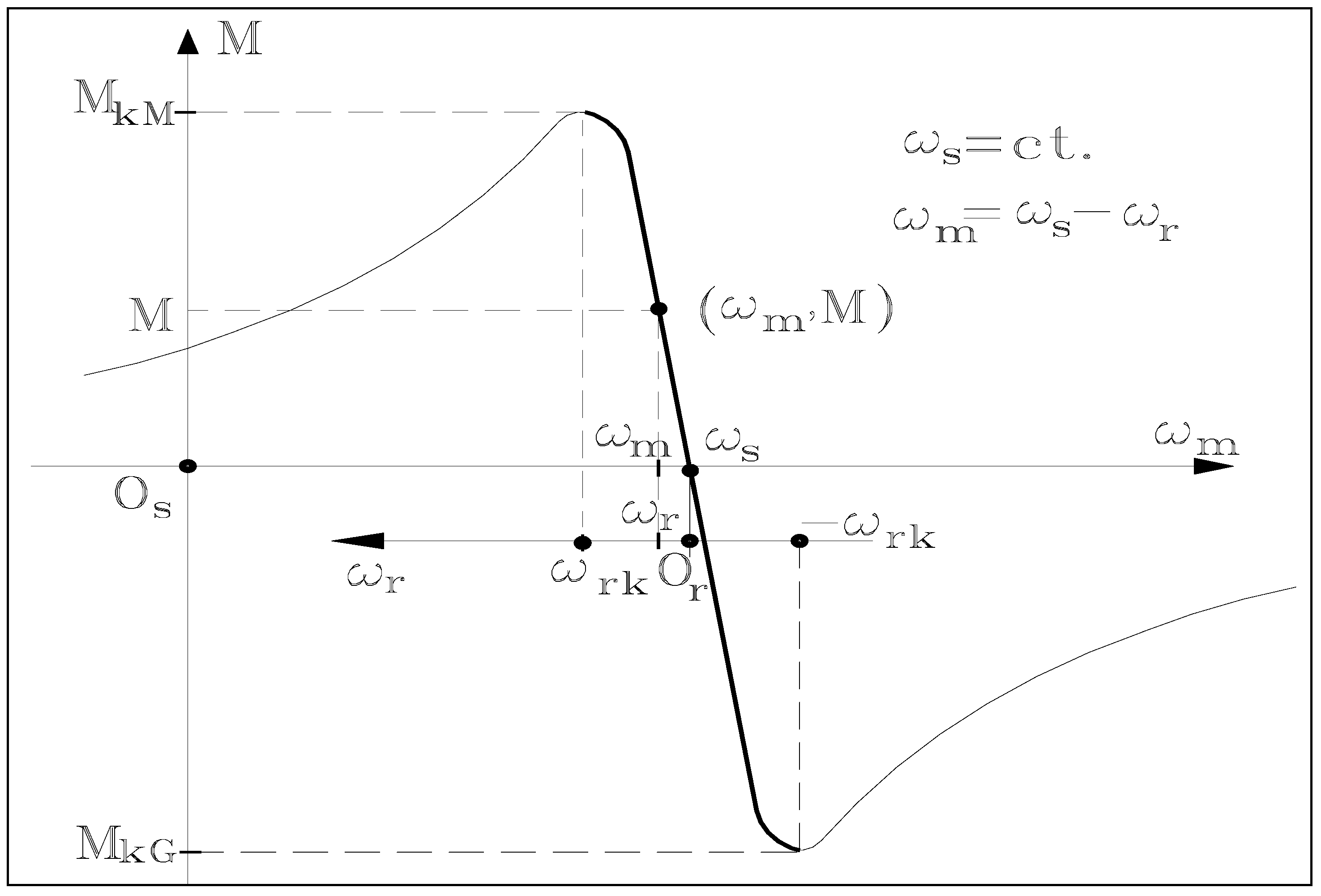
- mechanical pulsation ωm corresponding to the synchronism point (intersection with abscissa axis):
- critical rotor pulsations ωrk (extreme points’ abscissa of the graph in Figure 10):
- extreme values (critical as motor MkM and generator MkG, respectively) of the torque curve:

Assessment of Variation Range of Stator Frequency




5. Conclusions
Author Contributions
Nomenclature
stator frequency (rated stator frequency) [Hz] | |
| i | transmission ratio of gear reducer |
input current of VVVF inverter [A] | |
output currents of VVVF inverter [A] | |
| n | rotor speed [rpm] |
| ns | synchronous speed [rpm] |
| p | poles pair number of induction motor |
| C2Q | two-quadrants converter |
| C4Q | four-quadrants converter |
| Dr | wheel diameter [m] |
| F | total traction force [N] |
active motor force at rim [kN] | |
| FF | braking force at rim [kN] |
| IT (VI) | two levels VVVF inverter |
| FR (RF) | input filter (network filter) |
stator, rotor and useful (magnetizing)cyclical inductances [H] | |
electromagnetic torque (maximum electromagnetic torque, rated electromagnetic torque) [Nm] | |
| TIM | traction induction motor |
active power at rim [kW] | |
phase stator winding resistance [Ω] | |
rotor resistance reduced to stator [Ω] | |
supply line voltage and RMS current of induction motor [V], [A] | |
| Ud | input voltage of VVVF inverter [V] |
RMS phase stator voltage (RMS rated stator voltage) [V] | |
| VVVF | Variable voltage variable frequency |
| ηt | transmission efficiency of gear reducer |
| ωm = 2πpn/60 | mechanical angular frequency [elect.rad/s] |
| ωr = ωs − ωm | rotor angular frequency [elect.rad/s] |
| ωs = 2π fs | stator angular frequency [elect.rad/s] |
| ωN | rated stator angular frequency [elect.rad/s] |
| σ | leakage coefficient of induction machine (Blondel coefficient) |
| Ωm | mechanical angular speed of traction motor rotor [rad/s] |
| Ψs (ΨsN) | stator total flux (rated stator total flux) [Wb.turn] |
Conflicts of Interest
References
- Rosen, M.A.; Bulucea, C.A. Using exergy to understand and improve the efficiency of electrical power technologies. Entropy 2009, 11, 820–835. [Google Scholar] [CrossRef]
- Nicola, D.A.; Rosen, M.A.; Bulucea, C.A.; Brandusa, C. Sustainable energy conversion in electrically driven transportation systems. In Proceedings of the 6th WSEAS International Conference on Engineering Education (EE’09), Rhodes, Greece, 22–24 July 2009; pp. 124–132.
- Nicola, D.A.; Rosen, M.A.; Bulucea, C.A.; Brandusa, C. Some sustainability aspects of energy conversion in urban electric trains. Sustainability 2010, 2, 1389–1407. [Google Scholar] [CrossRef]
- Rosen, M.A. A concise review of energy-based economic methods. In Proceedings of the 3rd IASME/WSEAS International Conference on Energy & Environment, Cambridge, UK, 23–25 February 2008; pp. 136–142.
- Dincer, I.; Rosen, M.A. Exergy: Energy, Environment and Sustainable Development, 2nd ed.; Elsevier: Oxford, UK, 2013. [Google Scholar]
- Kaller, R.; Allenbach, J.M. Traction Electrique (Electrical Traction); PPUR: Lausanne, Switzerland, 1995; Volume 1–2. [Google Scholar]
- Perticaroli, F. Sistemi Elettrici per i Transporti: Trazione Elettrica; Masson: Milano-Parigi-Barcellona, Spain, 1994. [Google Scholar]
- Nicola, D.A.; Cismaru, D.C. Tractiune Electrica: Fenomene, Modele, Solutii (Electric Traction: Phenomena, Models, Solutions); SITECH Publishing House: Craiova, Romania, 2006. [Google Scholar]
- Nicola, D.A. Tractiune Electrica (Electric Traction); Universitaria Publishing House: Craiova, Romania, 2012. [Google Scholar]
- Buhler, H. Reglage de Systemes d’Electronique de Puissance; PPUR: Lausanne, Switzerland, 1997; Volume 1. [Google Scholar]
- Carpita, M.; Monti, A. Voltage source converters and drives simulation at system level for control design applications. EPE J. 1996, 5, 49–55. [Google Scholar]
- Bulucea, C.A.; Nicola, D.A.; Brandusa, A.; Brandusa, C. Drive systems in underground metro saving energy. In Proceedings of the 3rd IASME/WSEAS International Conference on Energy & Environment, Cambridge, UK, 23–25 February 2008; pp. 433–439.
- Nicola, D.A.; Bulucea, C.A.; Cismaru, D.C.; Brandusa, C. Energy saving in electric trains with traction induction motors. In Proceedings of the 4th IASME/WSEAS International Conference on Energy & Environment, Cambridge, UK, 24–26 February 2009; pp. 226–232.
- Bulucea, C.A.; Nicola, D.A.; Mastorakis, N.E.; Rosen, M.A. Understanding electric industrial ecosystems through exergy. In Recent Researches in Energy and Environment, Proceedings of the 6th IASME/WSEAS International Conference on Energy and Environment, Cambridge, UK, 20–25 February 2011; pp. 182–191.
- Nicola, D.A.; Rosen, M.A.; Bulucea, C.A.; Cismaru, D.C. Some aspects of sustainable energy conversion in electric railway vehicles with traction induction motors. In Recent Advances in Systems Science, Proceedings of the 17th International Conference on Systems, Rhodes Island, Greece, 16–19 July 2013; pp. 44–53.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosen, M.A.; Nicola, D.A.; Bulucea, C.A.; Cismaru, D.C. Sustainability Aspects of Energy Conversion in Modern High-Speed Trains with Traction Induction Motors. Sustainability 2015, 7, 3441-3459. https://0-doi-org.brum.beds.ac.uk/10.3390/su7033441
Rosen MA, Nicola DA, Bulucea CA, Cismaru DC. Sustainability Aspects of Energy Conversion in Modern High-Speed Trains with Traction Induction Motors. Sustainability. 2015; 7(3):3441-3459. https://0-doi-org.brum.beds.ac.uk/10.3390/su7033441
Chicago/Turabian StyleRosen, Marc A., Doru A. Nicola, Cornelia A. Bulucea, and Daniel C. Cismaru. 2015. "Sustainability Aspects of Energy Conversion in Modern High-Speed Trains with Traction Induction Motors" Sustainability 7, no. 3: 3441-3459. https://0-doi-org.brum.beds.ac.uk/10.3390/su7033441