Analysis of Azimuthal Variations Using Multi-Aperture Polarimetric Entropy with Circular SAR Images †

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
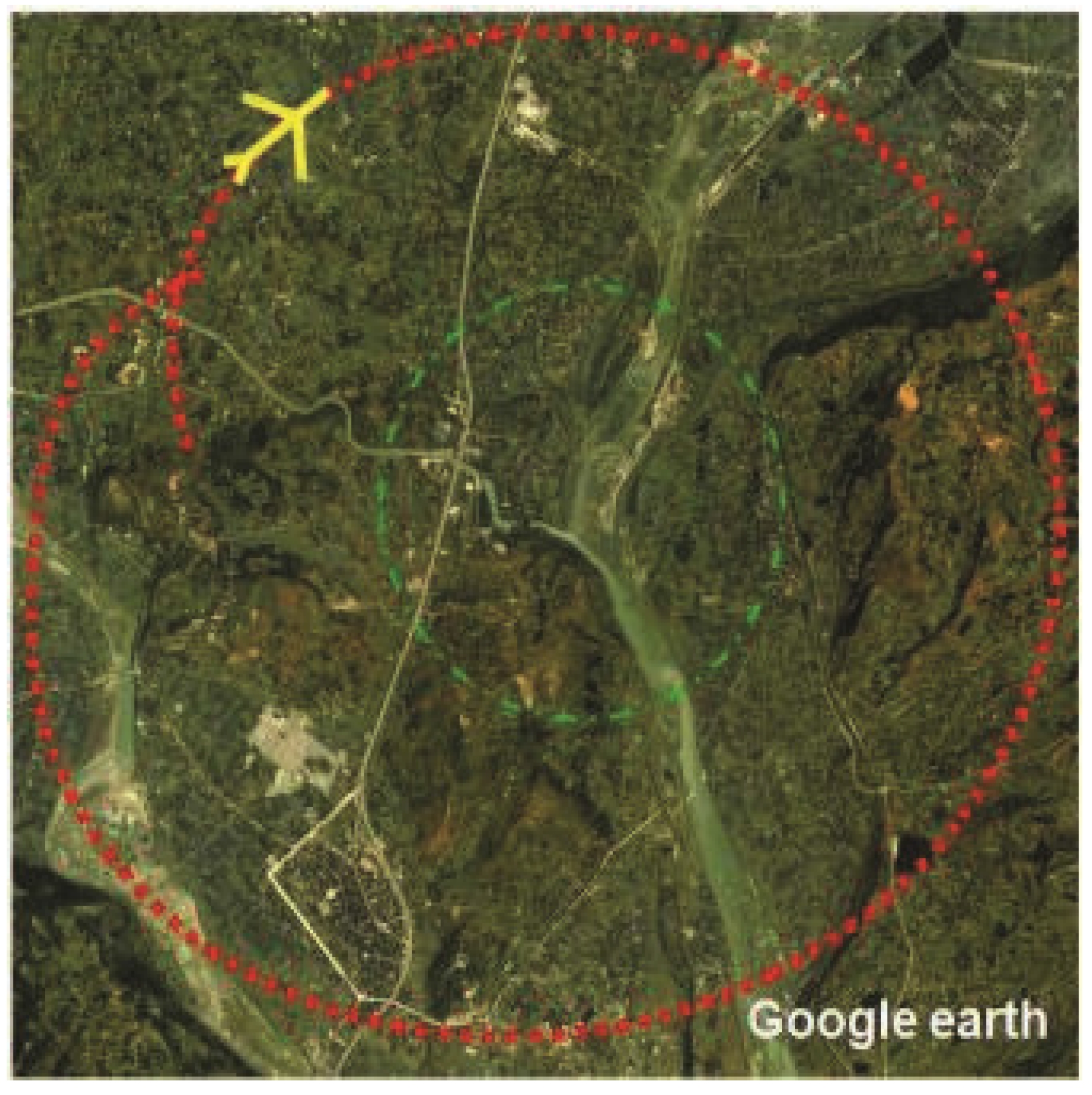
2.1. Dataset
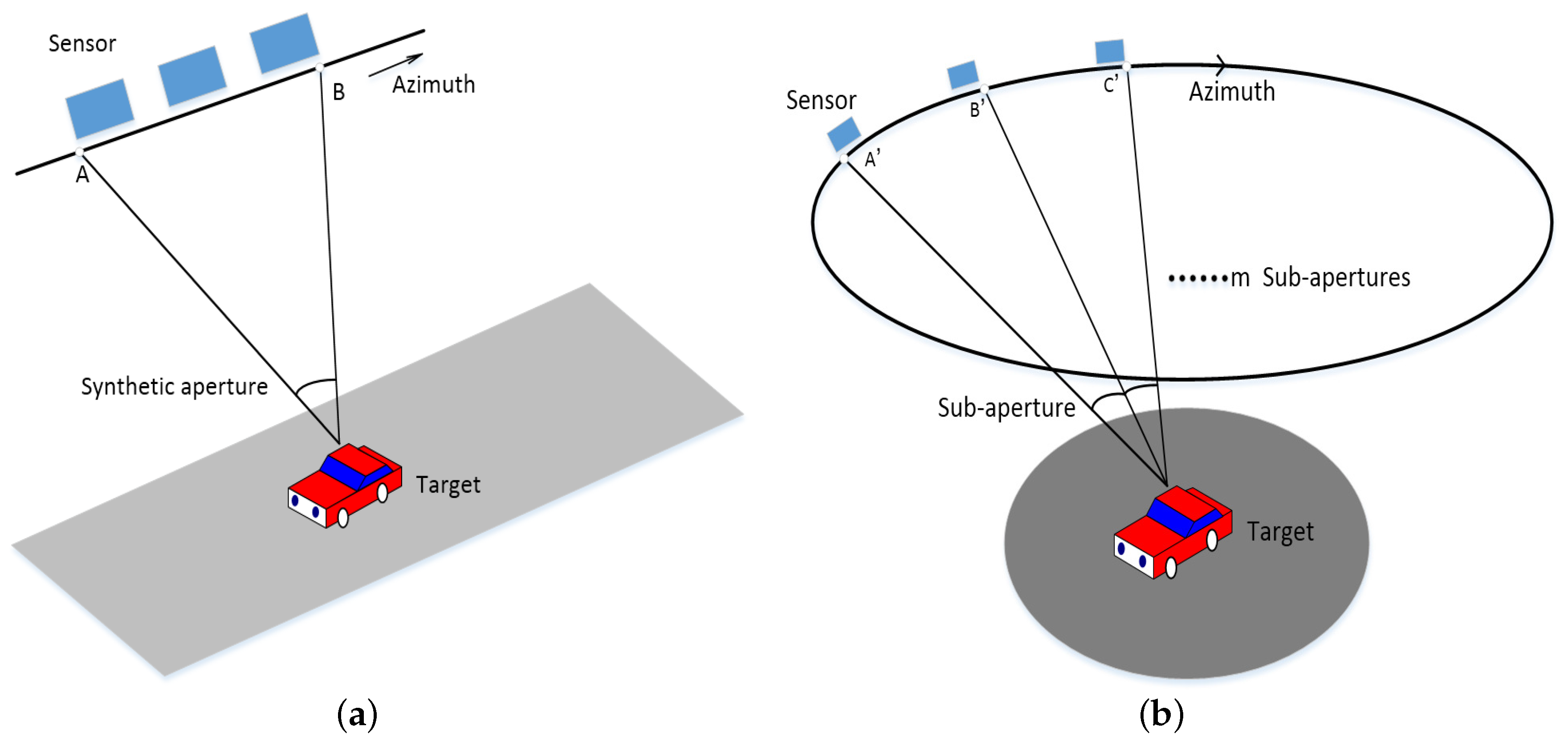
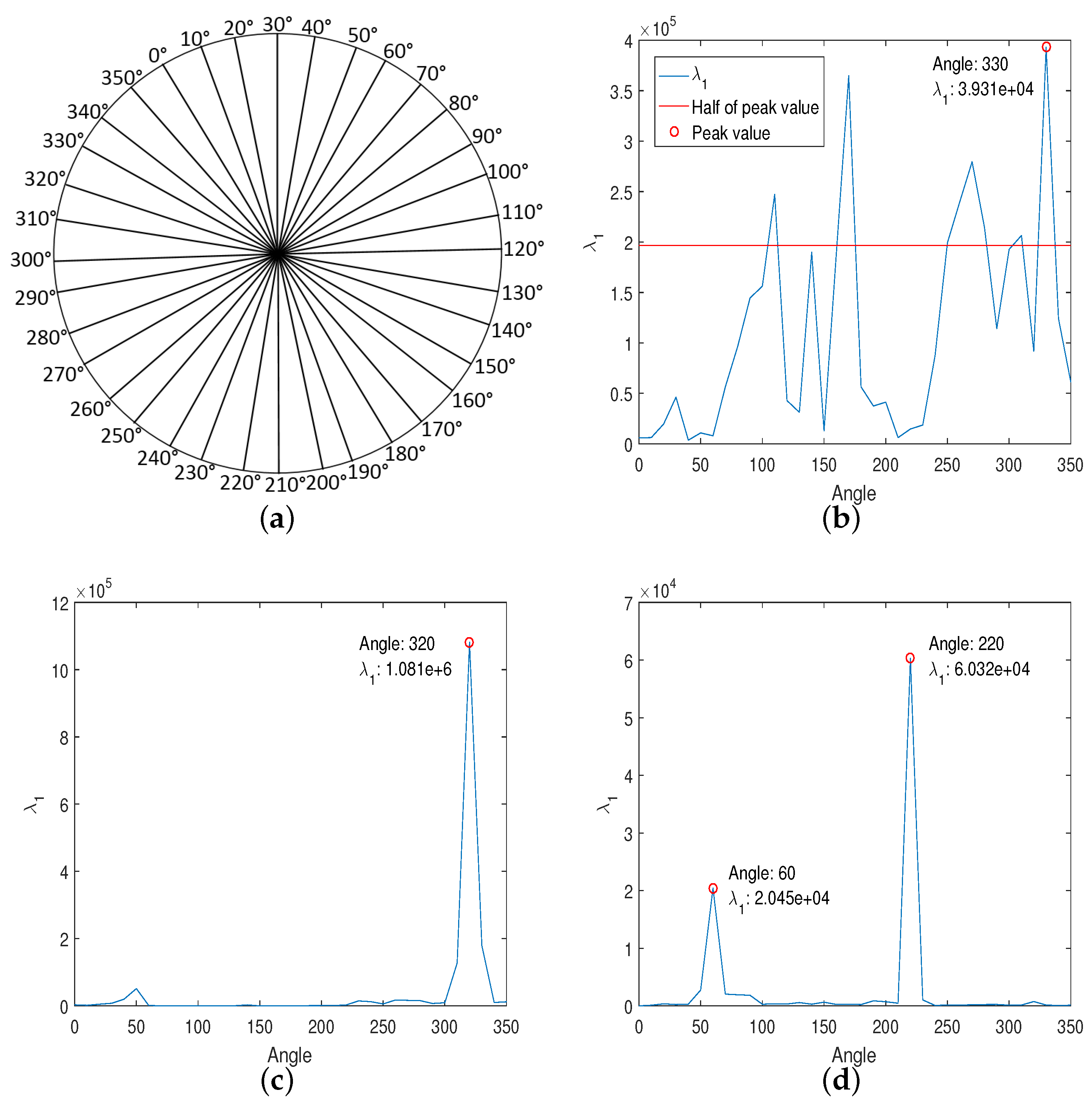
2.2. Multi-Aperture Observation Model
2.3. Multi-Aperture Polarimetric Entropy
3. Results and Discussion
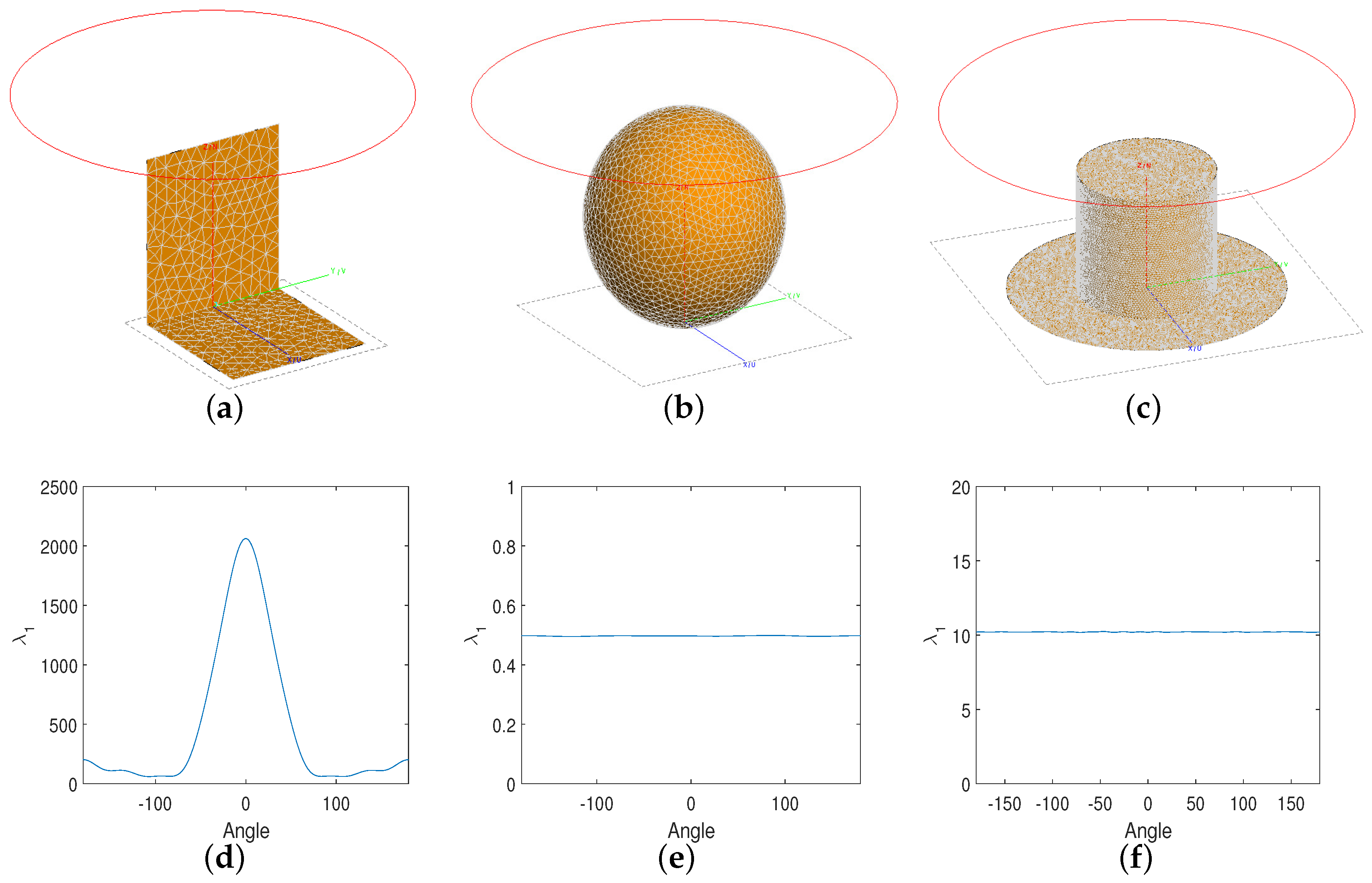
3.1. Simulation
- For a given , calculate with
- Simulate a complex random vector , which obeys complex normal distribution with mean zero, and the covariance matrix equals the identity matrix. The real and imaginary part of each complex element of are normally distributed with mean zero and variance .
- Compute the 1-look complex scattering vector
- Calculate the n-look covariance matrix
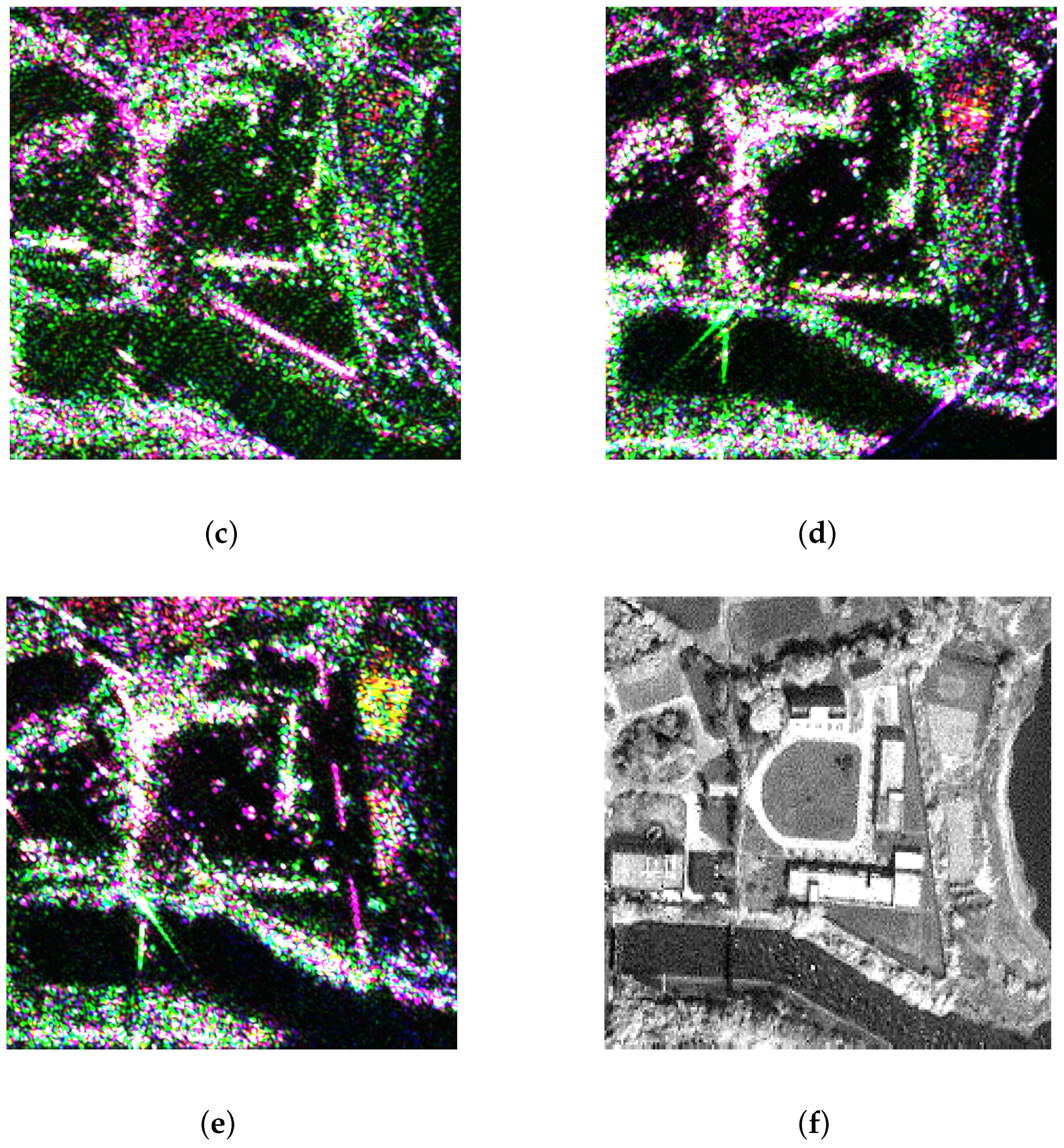
3.2. Real Data
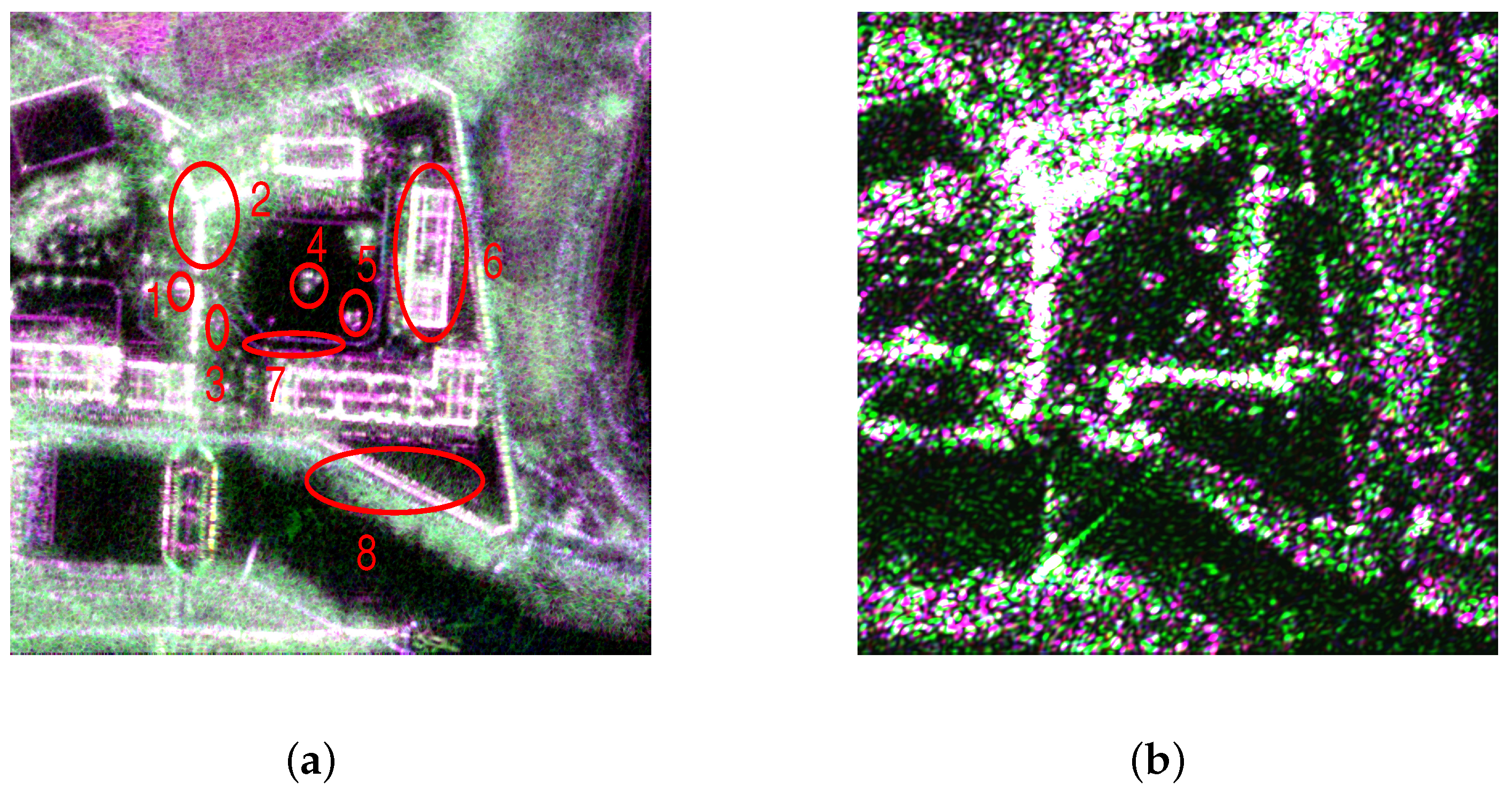
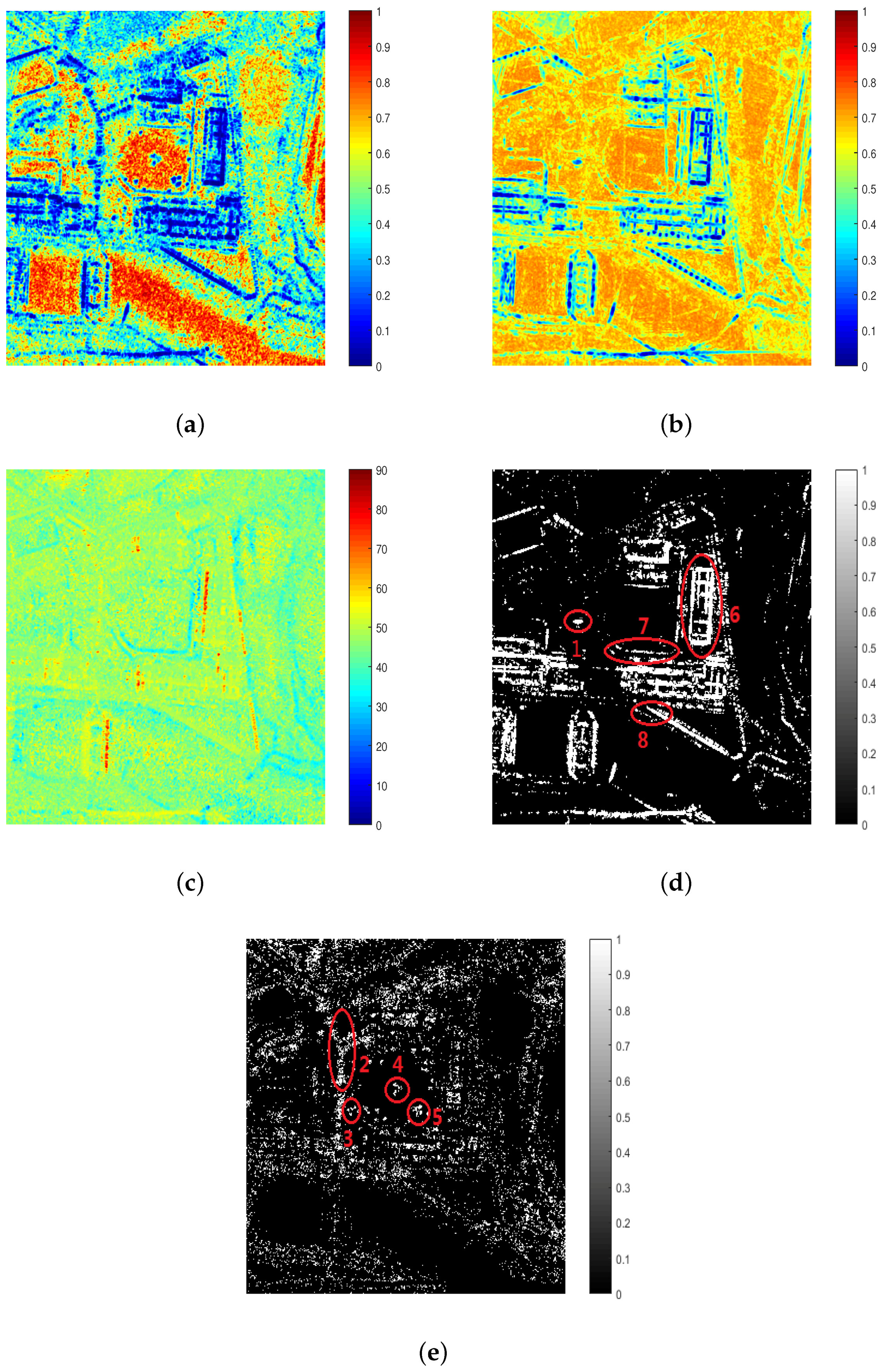
3.2.1. Power Station and Buildings
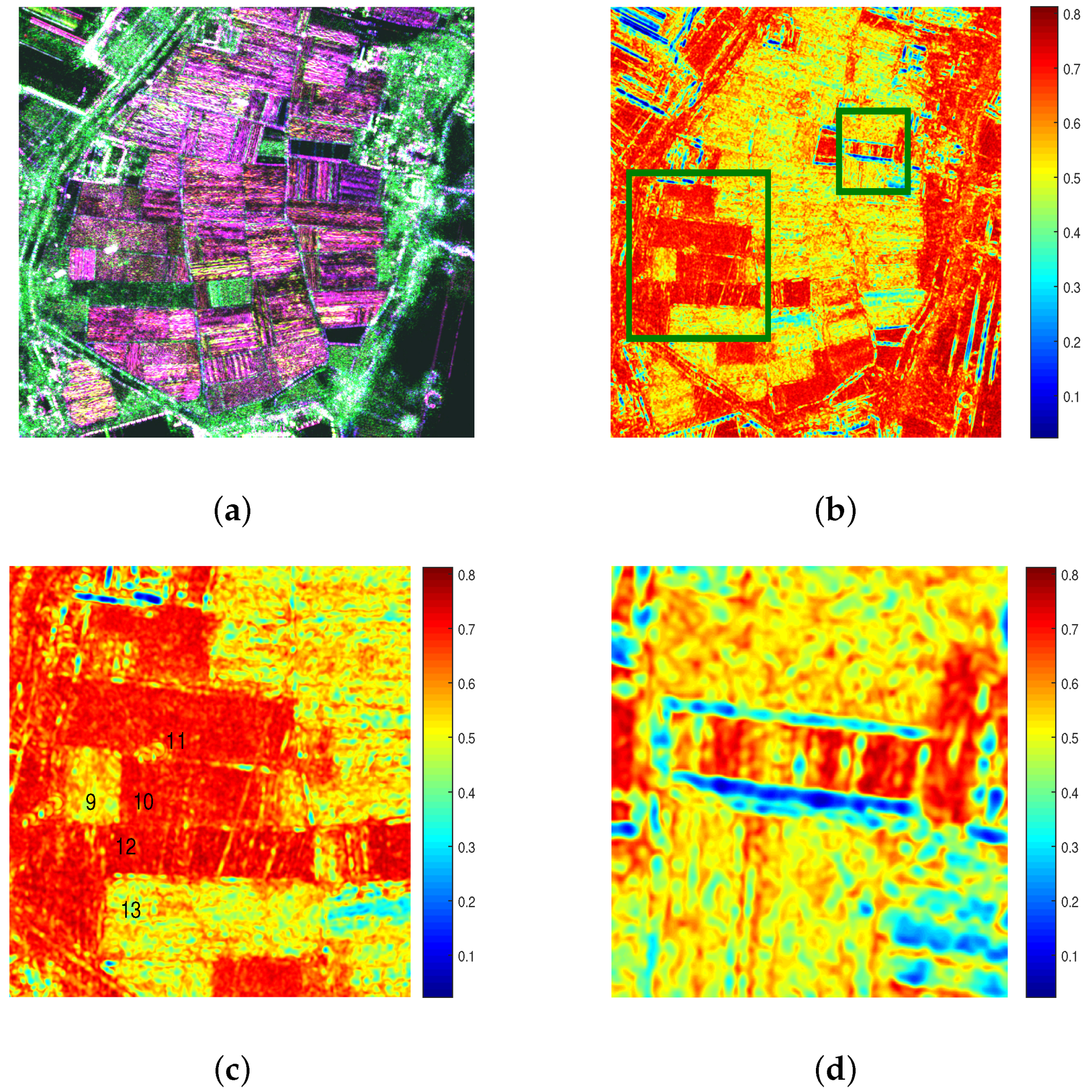
3.2.2. Agricultural Area
- In agricultural areas, farmland is planted with different crops that have different polarimetric randomness. Thus, targets 9 and 13 are significantly different from target 10 in Figure 9c.
- Targets 10 and 12 are slightly different. The difference between target 10 and 12 in Figure 9c is caused by shrubs.
- The two telegraph poles are different from target 10 in Figure 9c, although poles and target 10 are both isotropic. The difference between target 10 and poles is caused by different polarimetric randomness.
3.2.3. Comparison
3.3. Discussion of Sub-Aperture Partition
4. Potential Application
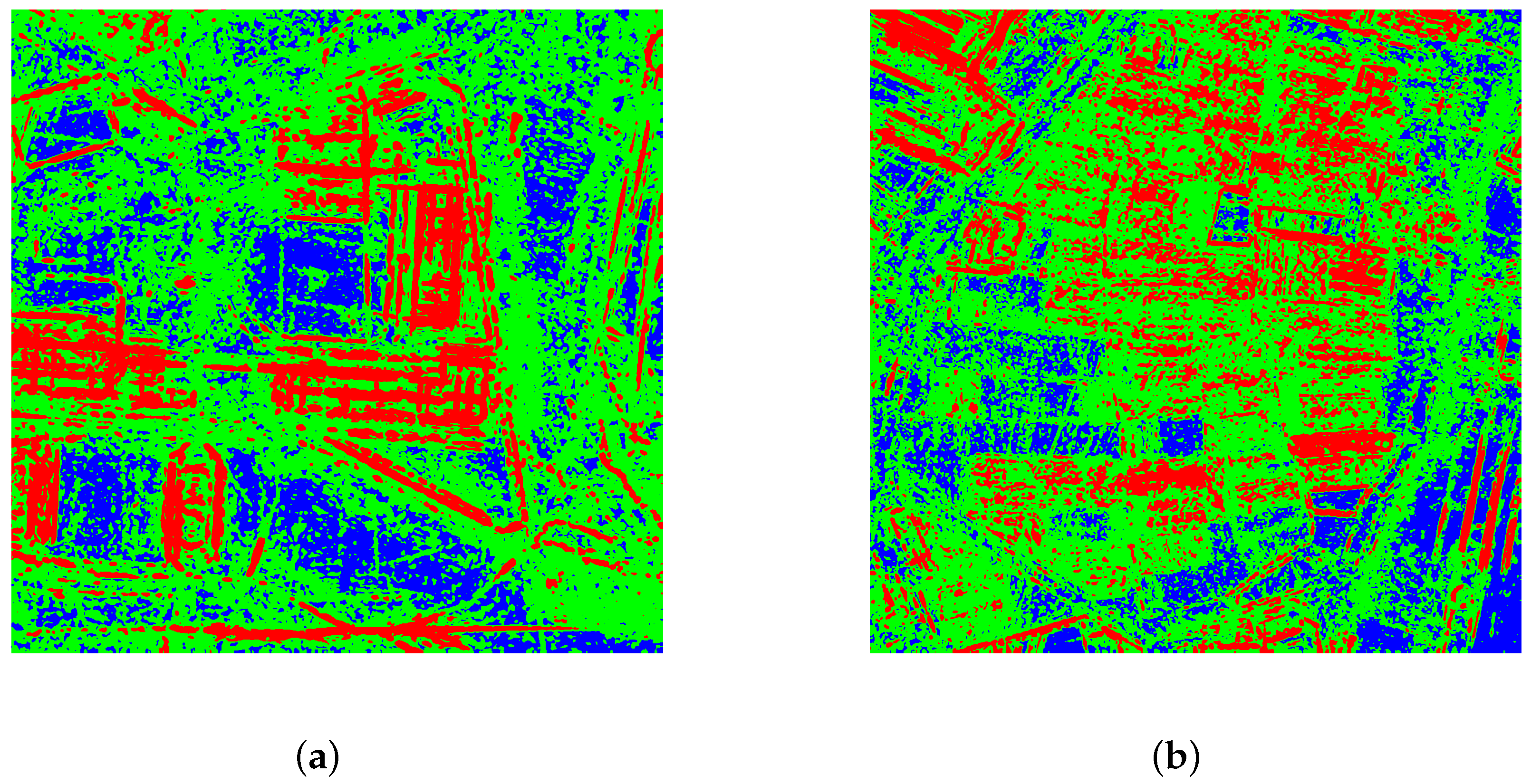
4.1. Classification
4.2. Target Discrimination
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SAR | Synthetic Aperture Radar |
| CSAR | Circular Synthetic Aperture Radar |
| MAPE | Multi-Aperture Polarimetric Entropy |
| Pol-CSAR | Polarimetric Circular Synthetic Aperture Radar |
| PolSAR | Polarimetric Synthetic Aperture Radar |
| DEM | Digital Elevation Model |
References
- Duquenoy, M.; Ovarlez, J.P.; Ferro-Famil, L.; Pottier, E.; Vignaud, L. Scatterers characterisation in radar imaging using joint time-frequency analysis and polarimetric coherent decompositions. IET Radar Sonar Navig. 2010, 4, 384–402. [Google Scholar] [CrossRef]
- Moses, R.L.; Potter, L.C.; Cetin, M. Wide-angle SAR imaging. Int. Soc. Opt. Eng. 2004, 5427, 164–175. [Google Scholar]
- Ponce, O.; Prats-Iraola, P.; Pinheiro, M.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A.; Moreira, A. Fully-Polarimetric High-Resolution 3-D Imaging with Circular SAR at L-Band. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1–17. [Google Scholar] [CrossRef]
- Lin, Y.; Hong, W.; Tan, W.; Wang, Y. Airborne circular SAR imaging: Results at P-band. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5594–5597. [Google Scholar]
- Trintinalia, L.C.; Bhalla, R.; Ling, H. Scattering center parameterization of wide-angle backscattered data using adaptive Gaussian representation. IEEE Trans. Antennas Propag. 1997, 45, 1664–1668. [Google Scholar] [CrossRef]
- Si-Wei, C.; Yong-Zhen, L.; Xue-Song, W.; Shun-Ping, X.; Sato, M. Modeling and Interpretation of Scattering Mechanisms in Polarimetric Synthetic Aperture Radar: Advances and perspectives. IEEE Signal Process. Mag. 2014, 31, 79–89. [Google Scholar]
- Alonso-Gonzalez, A.; Lopez-Martinez, C.; Salembier, P. Filtering and Segmentation of Polarimetric SAR Data Based on Binary Partition Trees. IEEE Trans. Geosci. Remote Sens. 2012, 50, 593–605. [Google Scholar] [CrossRef]
- Kersten, P.R.; Lee, J.S.; Ainsworth, T.L. Unsupervised Classification of Polarimetric Synthetic Aperture Radar Images Using Fuzzy Clustering and EM Clustering. IEEE Trans. Geosci. Remote Sens. 2005, 43, 519–527. [Google Scholar] [CrossRef]
- Van Zyl, J.J. Unsupervised classification of scattering behavior using radar polarimetry data. IEEE Trans. Geosci. Remote Sens. 1989, 27, 36–45. [Google Scholar] [CrossRef]
- Ferrofamil, L.; Reigber, A.; Pottier, E. Nonstationary natural media analysis from polarimetric SAR data using a two-dimensional time-frequency decomposition approach. Can. J. Remote Sens. 2005, 31, 21–29. [Google Scholar] [CrossRef]
- Ainsworth, T.L.; Jansen, R.W.; Lee, J.S.; Fiedler, R. Sub-aperture analysis of high-resolution polarimetric SAR data. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium (IGARSS ’99), Hamburg, Germany, 28 June–2 July 1999; Volume 1, pp. 41–43. [Google Scholar]
- Flake, L.R.; Ahalt, S.C.; Krishnamurthy, A.K. Detecting anisotropic scattering with hidden Markov models. IEE Proc. Radar Sonar Navig. 2002, 144, 81–86. [Google Scholar] [CrossRef]
- Runkle, P.; Nguyen, L.H.; Mcclellan, J.H.; Carin, L. Multi-aspect target detection for SAR imagery using hidden Markov models. IEEE Trans. Geosci. Remote Sens. 2001, 39, 46–55. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Reigber, A.; Pottier, E.; Boerner, W.M. Scene characterization using subaperture polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2264–2276. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Zhang, H.; Xu, F. Anisotropic analysis of polarimetric scattering and case studies with UAVSAR images. Int. J. Remote Sens. 2016, 37, 5176–5195. [Google Scholar] [CrossRef]
- Zhao, Y.; Lin, Y.; Hong, W.; Yu, L. Adaptive imaging of anisotropic target based on circular-SAR. Electron. Lett. 2016, 52, 1406–1408. [Google Scholar] [CrossRef]
- Li, Y.; Lin, Y.; Zhang, J.J.; Guo, X.Y.; Chen, S.Q.; Hong, W. Estimation and removing of anisotropic scattering for multiaspect polarimetric SAR image. J. Radars 2015, 4, 254–264. [Google Scholar]
- Xu, F.; Li, Y.; Jin, Y.Q. Polarimetric–Anisotropic Decomposition and Anisotropic Entropies of High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2016, 1–16. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Ainsworth, T.L.; Du, L.J.; Schuler, D.L.; Cloude, S.R. Unsupervised classification using polarimetric decomposition and the complex Wishart classifier. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2249–2258. [Google Scholar]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Mullissa, A.G.; Tolpekin, V.; Stein, A. Scattering property based contextual PolSAR speckle filter. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 78–89. [Google Scholar] [CrossRef]
- Lee, J.S.; Ainsworth, T.L.; Kelly, J.P.; Lopez-Martinez, C. Evaluation and Bias Removal of Multilook Effect on Entropy/Alpha/Anisotropy in Polarimetric SAR Decomposition. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3039–3052. [Google Scholar] [CrossRef]
- Lee, J.S.; Ainsworth, T.L.; Kelly, J.; Lopez-Martinez, C. Statistical evaluation and bias removal of multi-look effect on Entropy/ alpha/Anisotropy in polarimetric target decomposition. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Gatelli, F.; Monti Guamieri, A.; Parizzi, F.; Pasquali, P.; Prati, C.; Rocca, F. The Wavenumber Shift in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 1994, 29, 855–865. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Pottier, E. Radar target decomposition theorems and unsupervized classification of full polarimetric SAR data. In Proceedings of the Geoscience and Remote Sensing Symposium, 1994. IGARSS ’94. Surface and Atmospheric Remote Sensing: Technologies, Data Analysis and Interpretation., International, Pasadena, CA, USA, 8–12 August 1994; pp. 1139–1141. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Pottier, E.; Jong-Sen, L. Unsupervised classification of multifrequency and fully polarimetric SAR images based on the H/A/Alpha-Wishart classifier. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2332–2342. [Google Scholar] [CrossRef]
- Lopez-Martinez, C.; Pottier, E.; Cloude, S.R. Statistical Assessment of Eigenvector-Based Target Decomposition Theorems in Radar Polarimetry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2058–2074. [Google Scholar] [CrossRef] [Green Version]
- Cloude, S.R. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Grandi, G.D. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Schuler, D.L.; Pottier, E.; Ferro-Famil, L. Scattering-model-based speckle filtering of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 176–187. [Google Scholar]
- LEE, J.S.; GRUNES, M.R.; KWOK, R. Classification of multi-look polarimetric SAR imagery based on complex Wishart distribution. Int. J. Remote Sens. 1994, 15, 2299–2311. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | HH HV VH VV |
|---|---|
| Carrier frequency | 600 MHz |
| Bandwidth | 200 MHz |
| Circle radius | ≈3000 m |
| Mean height | ≈3000 m |
| Targets | Entropy | MAPE |
|---|---|---|
| Dihedral | ≈0 | 0.2189 |
| Sphere | ≈0 | 0.66 |
| Tophat | ≈0 | 0.6584 |
| River surface target | 0.814 | 0.753 |
| Sub-aperture size | ||||||||||
| MAPE | 0.482 | 0.424 | 0.371 | 0.350 | 0.319 | 0.294 | 0.294 | 0.250 | 0.234 | 0.230 |
| Sub-aperture size | ||||||||||
| MAPE | 0.203 | 0.191 | 0.178 | 0.179 | 0.180 | 0.118 | 0.086 | 0.171 | 0.043 | 0.179 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, F.; Lin, Y.; Hong, W.; Yin, Q.; Zhang, B.; Shen, W.; Zhao, Y. Analysis of Azimuthal Variations Using Multi-Aperture Polarimetric Entropy with Circular SAR Images. Remote Sens. 2018, 10, 123. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10010123
Xue F, Lin Y, Hong W, Yin Q, Zhang B, Shen W, Zhao Y. Analysis of Azimuthal Variations Using Multi-Aperture Polarimetric Entropy with Circular SAR Images. Remote Sensing. 2018; 10(1):123. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10010123
Chicago/Turabian StyleXue, Feiteng, Yun Lin, Wen Hong, Qiang Yin, Bingchen Zhang, Wenjie Shen, and Yue Zhao. 2018. "Analysis of Azimuthal Variations Using Multi-Aperture Polarimetric Entropy with Circular SAR Images" Remote Sensing 10, no. 1: 123. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10010123