Extraction of Anisotropic Characteristics of Scattering Centers and Feature Enhancement in Wide-Angle SAR Imagery Based on the Iterative Re-Weighted Tikhonov Regularization

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
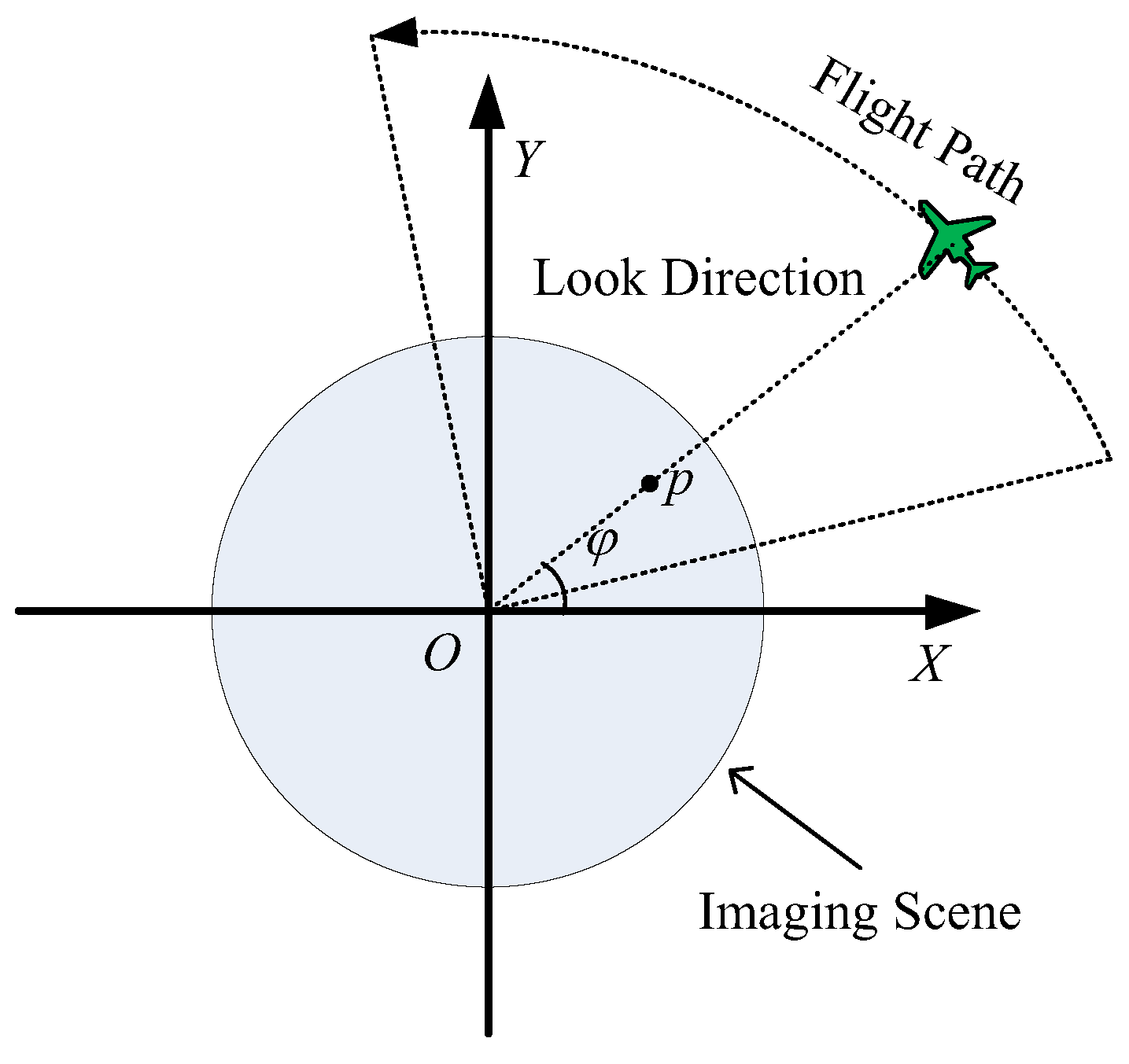
2. Analysis of the Signal Model in Wide-Angle SAR Imaging
2.1. Problem Formulation
2.2. Signal Model of Return Signals
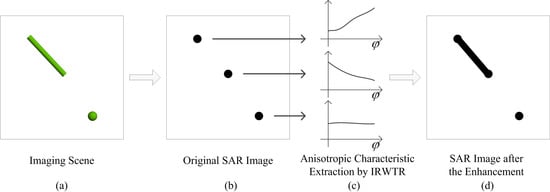
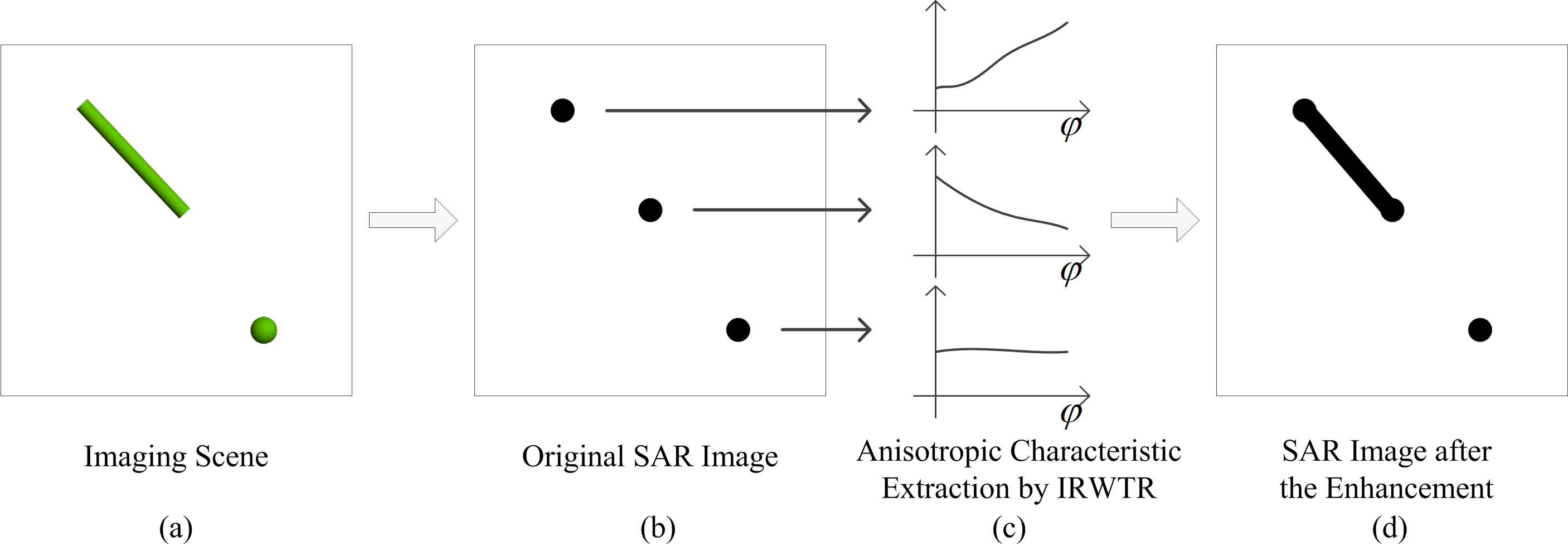
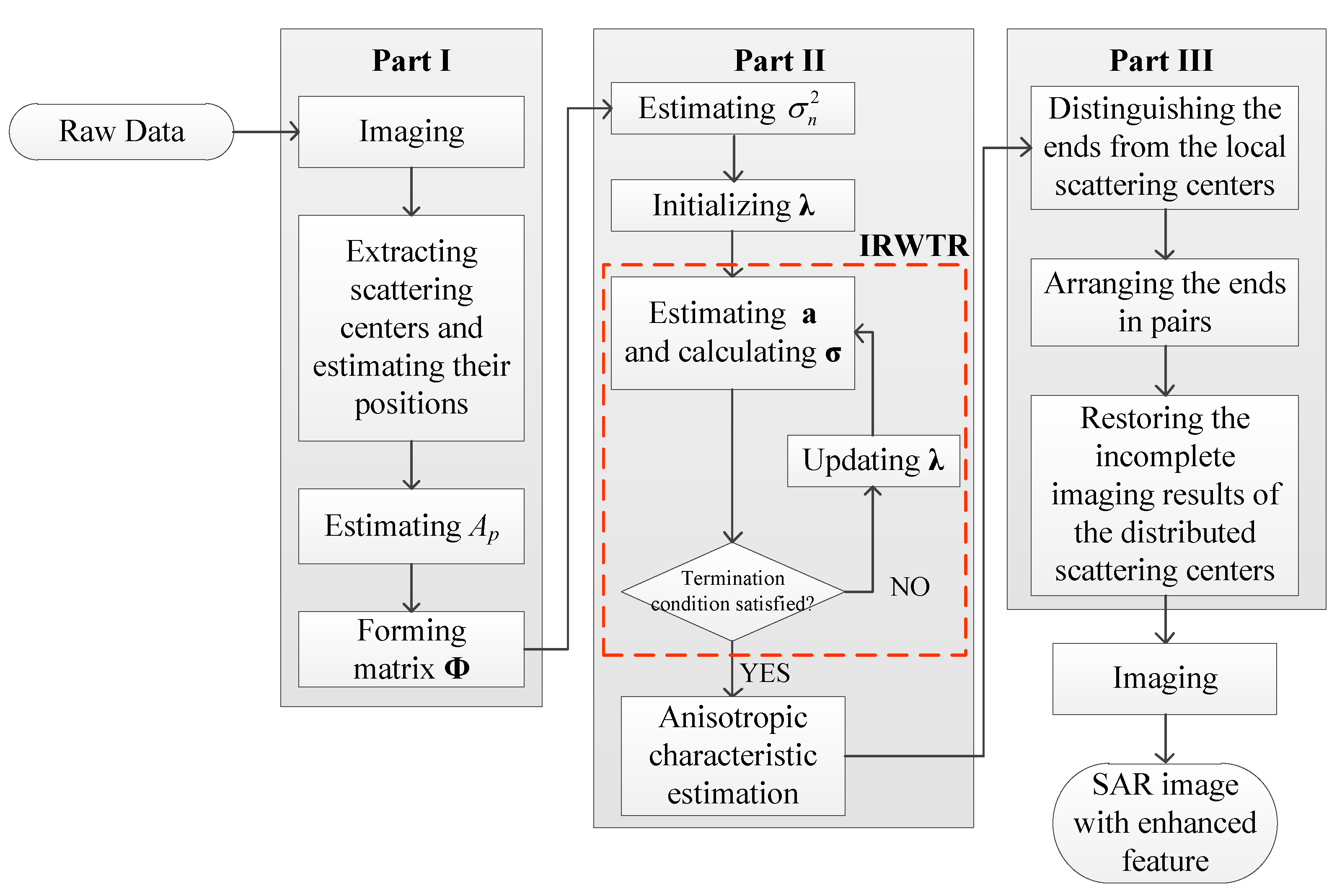
3. The IRWTR Algorithm and Feature Enhancement of Wide-Angle SAR Images
3.1. Selection of Scattering Centers and Estimation of the Relative Amplitudes and Positions
3.2. Anisotropic Characteristic Estimation
3.3. The Restoration of the Incomplete Images of Certain Distributed Scattering Centers
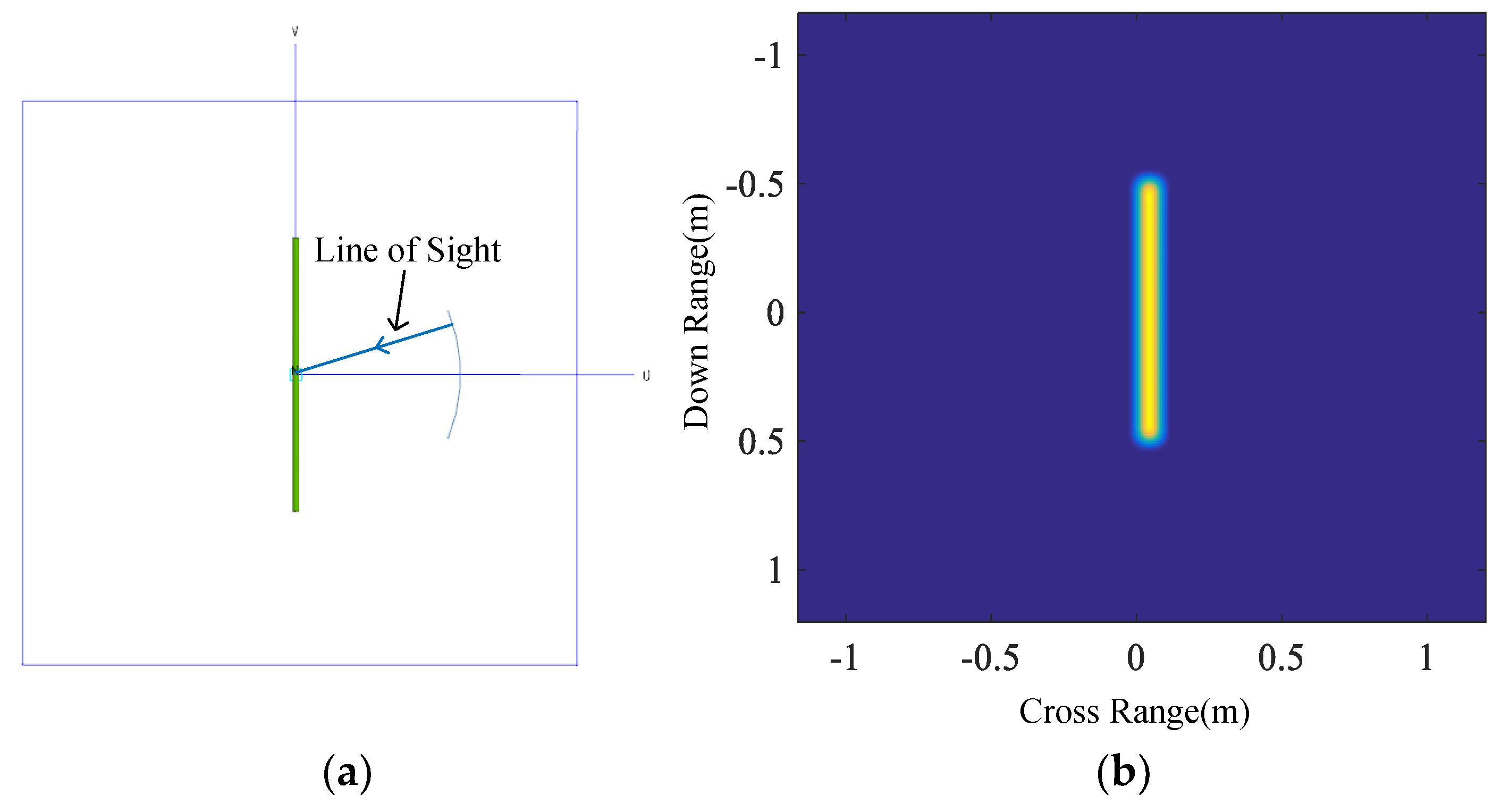
4. Experimental Results
4.1. Results of Matlab Simulated Data and Analysis
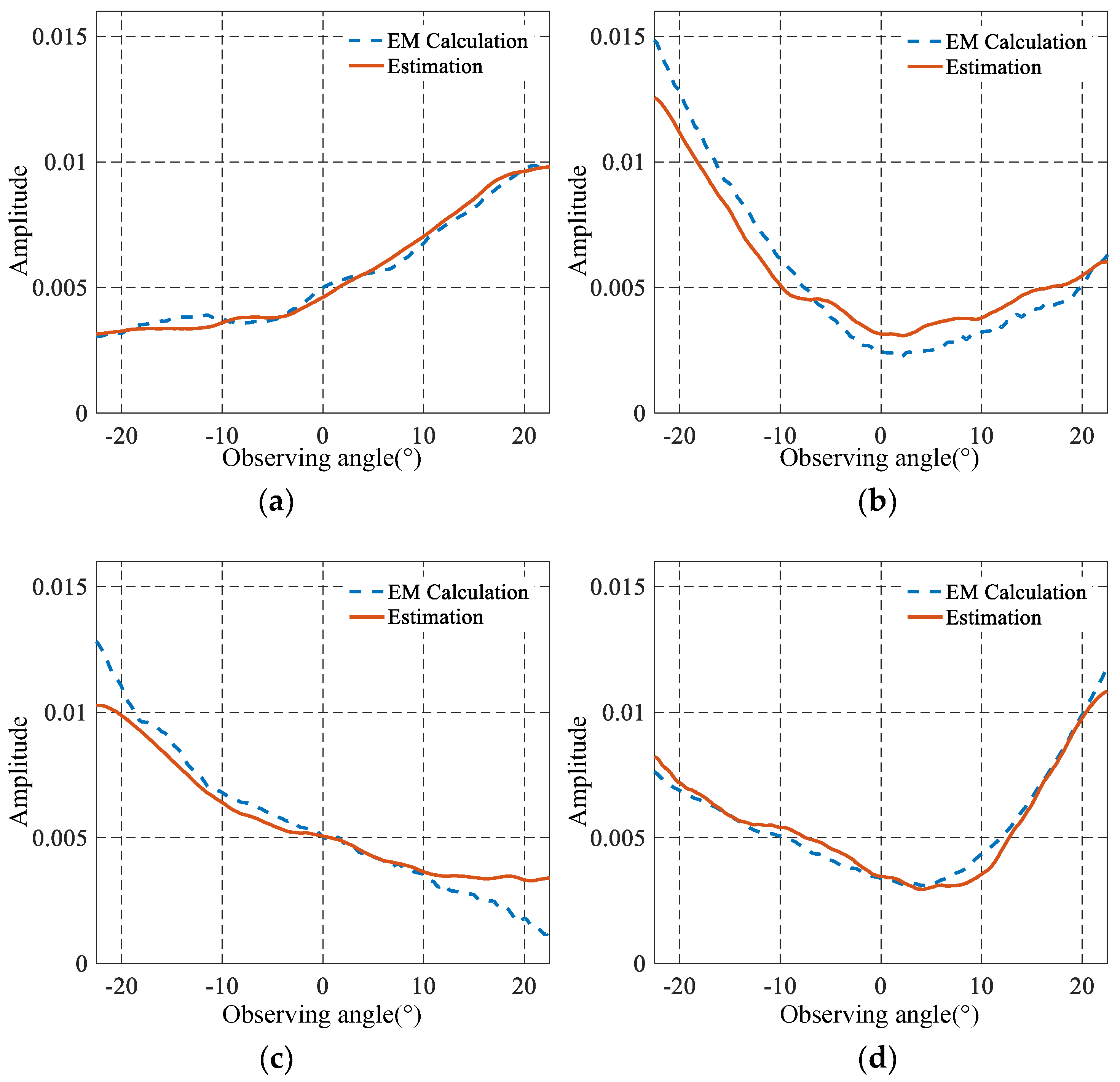
4.2. The Results of Electromagnetic Simulation Data and Analysis
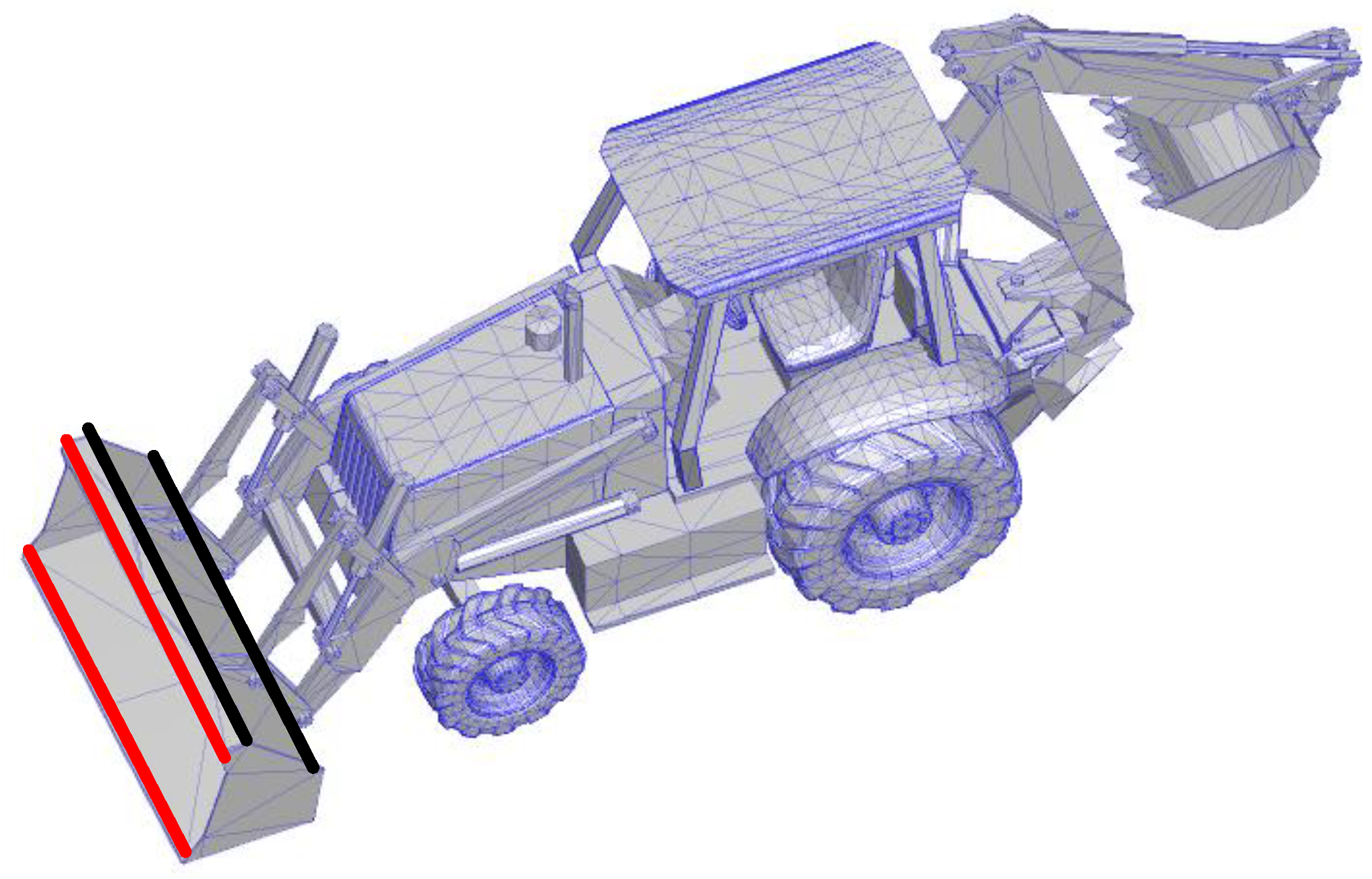
4.3. The Results of the Backhoe Data and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ash, J.N.; Ertin, E.; Potter, L.C.; Zelnio, E.G. Wide-angle synthetic aperture radar imaging: Models and algorithms for anisotropic scattering. IEEE Signal Process. Mag. 2014, 31, 16–26. [Google Scholar] [CrossRef]
- Varshney, K.R.; Çetin, M.; Fisher, J.W.; Willsky, A.S. Sparse representation in structured dictionaries with application to synthetic aperture radar. IEEE Trans. Signal Process. 2008, 56, 3548–3561. [Google Scholar] [CrossRef]
- Xu, F.; Li, Y.; Jin, Y. Polarimetric-anisotropic decomposition and anisotropic entropies of high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5467–5482. [Google Scholar] [CrossRef]
- Duan, J.; Zhang, L.; Xing, M.; Wu, Y.; Wu, M. Polarimetric target decomposition based on attributed scattering center model for synthetic aperture radar targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2095–2099. [Google Scholar] [CrossRef]
- Fuller, D.F.; Saville, M.A. A high-frequency multipeak model for wide-angle SAR imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4279–4291. [Google Scholar] [CrossRef]
- Liu, H.; Jiu, B.; Fei, Li.; Wang, Y. Attributed scattering center extraction algorithm based on sparse representation with dictionary refinement. IEEE Trans. Antennas Propag. 2017, 65, 2604–2614. [Google Scholar] [CrossRef]
- Ertin, E.; Moses, R.L. Through-the-wall SAR attributed scattering center feature estimation. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1338–1348. [Google Scholar] [CrossRef]
- Potter, L.C.; Moses, R.L. Attributed scattering centers for SAR ATR. IEEE Trans. Image Process. 1997, 6, 79–91. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gerry, M.J.; Potter, L.C.; Gupta, I.J.; Merwe, A.V.D. A parametric model for synthetic aperture radar measurements. IEEE Trans. Antennas Propag. 1999, 47, 1179–1188. [Google Scholar] [CrossRef]
- He, Y.; He, S.; Zhang, Y.; Wen, G.; Yu, D.; Zhu, G. A forward approach to establish parametric scattering center models for known complex radar targets applied to SAR ATR. IEEE Trans. Antennas Propag. 2014, 62, 6192–6205. [Google Scholar] [CrossRef]
- Altair FEKO™: A Comprehensive Computational Electromagnetics Code. Introduction. Available online: https://altairhyperworks.com/product/FEKO (accessed on 3 December 2018).
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Zhang, L.; Liu, Y.; Li, Y. Bayesian inverse synthetic aperture radar imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1150–1154. [Google Scholar] [CrossRef]
- Ziniel, J.; Schniter, P. Dynamic compressive sensing of time-varying signals via approximate message passing. IEEE Trans. Signal Process. 2013, 61, 5270–5284. [Google Scholar] [CrossRef]
- Ziniel, J.; Schniter, P. Efficient high-dimensional inference in the multiple measurement vector problem. IEEE Trans. Signal Process. 2013, 61, 340–354. [Google Scholar] [CrossRef]
- Charles, A.S.; Balavoine, A.; Rozell, J.C. Dynamic filtering of time-varying sparse signals via L1 minimization. IEEE Trans. Signal Process. 2016, 64, 5644–5656. [Google Scholar] [CrossRef]
- Stojanovic, I.; Cetin, M.; Karl, W.C. Joint space aspect reconstruction of wide-angle SAR exploiting sparsity. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 15 April 2008; Volume 6970, pp. 1–12. [Google Scholar] [CrossRef]
















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Xing, M.; Guo, L.; Zhang, Z. Extraction of Anisotropic Characteristics of Scattering Centers and Feature Enhancement in Wide-Angle SAR Imagery Based on the Iterative Re-Weighted Tikhonov Regularization. Remote Sens. 2018, 10, 2066. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10122066
Gao Y, Xing M, Guo L, Zhang Z. Extraction of Anisotropic Characteristics of Scattering Centers and Feature Enhancement in Wide-Angle SAR Imagery Based on the Iterative Re-Weighted Tikhonov Regularization. Remote Sensing. 2018; 10(12):2066. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10122066
Chicago/Turabian StyleGao, Yuexin, Mengdao Xing, Liang Guo, and Zijing Zhang. 2018. "Extraction of Anisotropic Characteristics of Scattering Centers and Feature Enhancement in Wide-Angle SAR Imagery Based on the Iterative Re-Weighted Tikhonov Regularization" Remote Sensing 10, no. 12: 2066. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10122066