Forest Height Estimation Based on Constrained Gaussian Vertical Backscatter Model Using Multi-Baseline P-Band Pol-InSAR Data


Abstract
:1. Introduction
2. Derivation of CGVB Model
2.1. GVB Model
2.2. CGVB Model
3. Estimation of Volume Coherence with IWCLS
3.1. Establishment of Vector Observation Model
3.2. Linearization of Nonlinear Optimized Equation with Taylor Expansion
3.3. Estimation of Volume Coherence
4. Forest Height Estimation Based on CGVB Model
4.1. Establishment of Statistical Model with SLBR
4.2. Establishment of CGVB Model
4.3. Forest Height Estimation
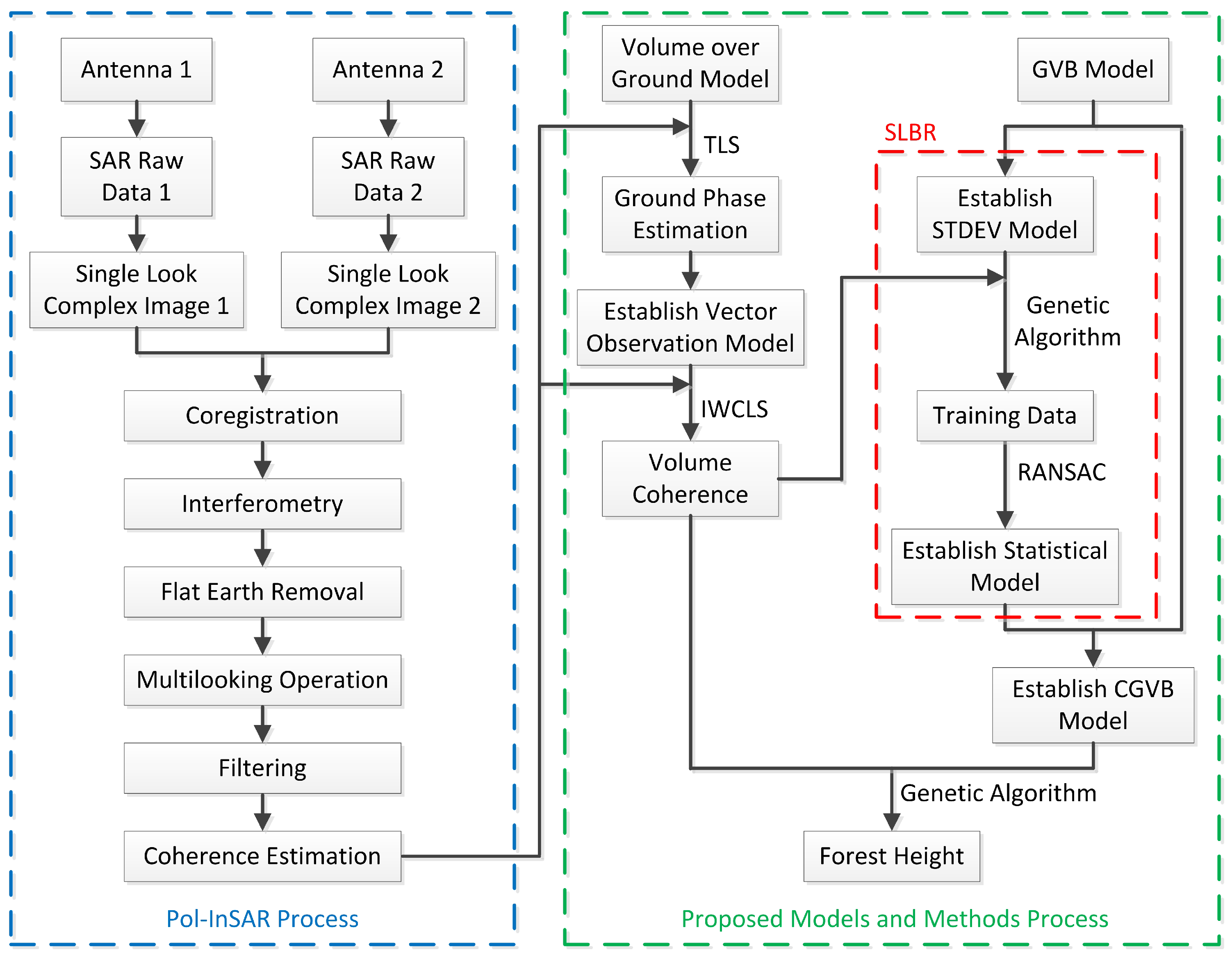
5. Summary of the Proposed Models and Methods
6. Verification of the Proposed CGVB Model and SLBR Method
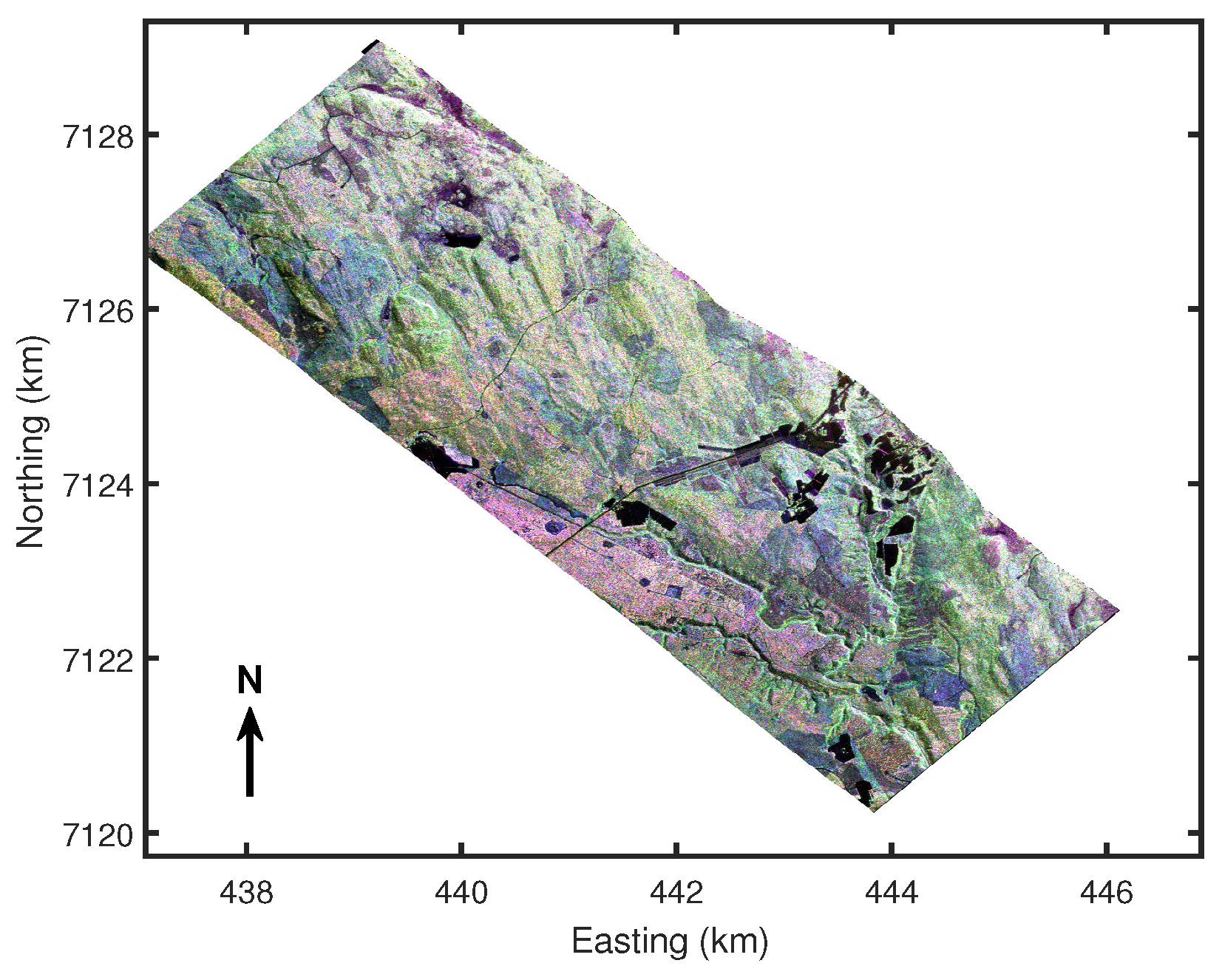
6.1. E-SAR P-Band Pol-InSAR Data
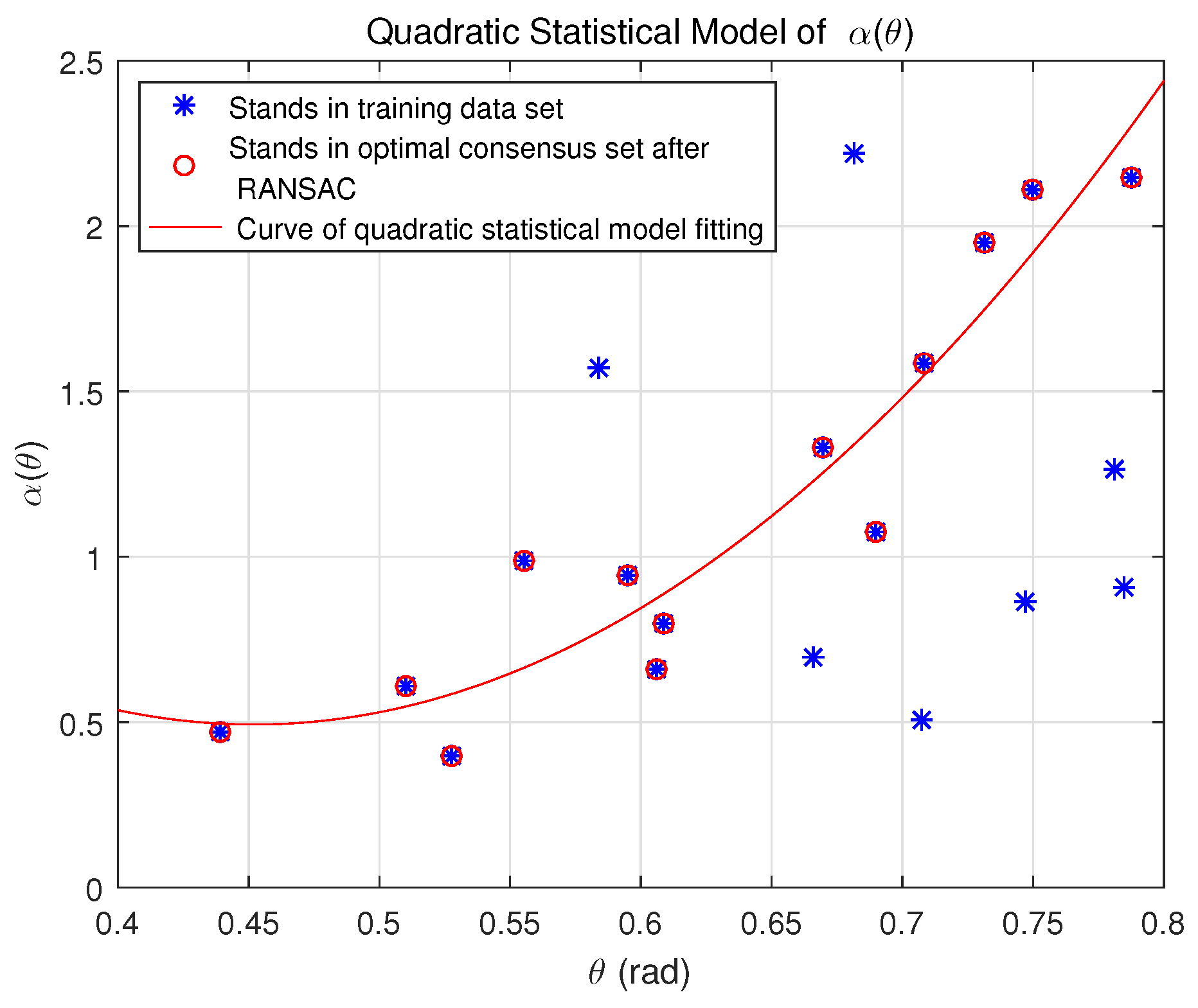
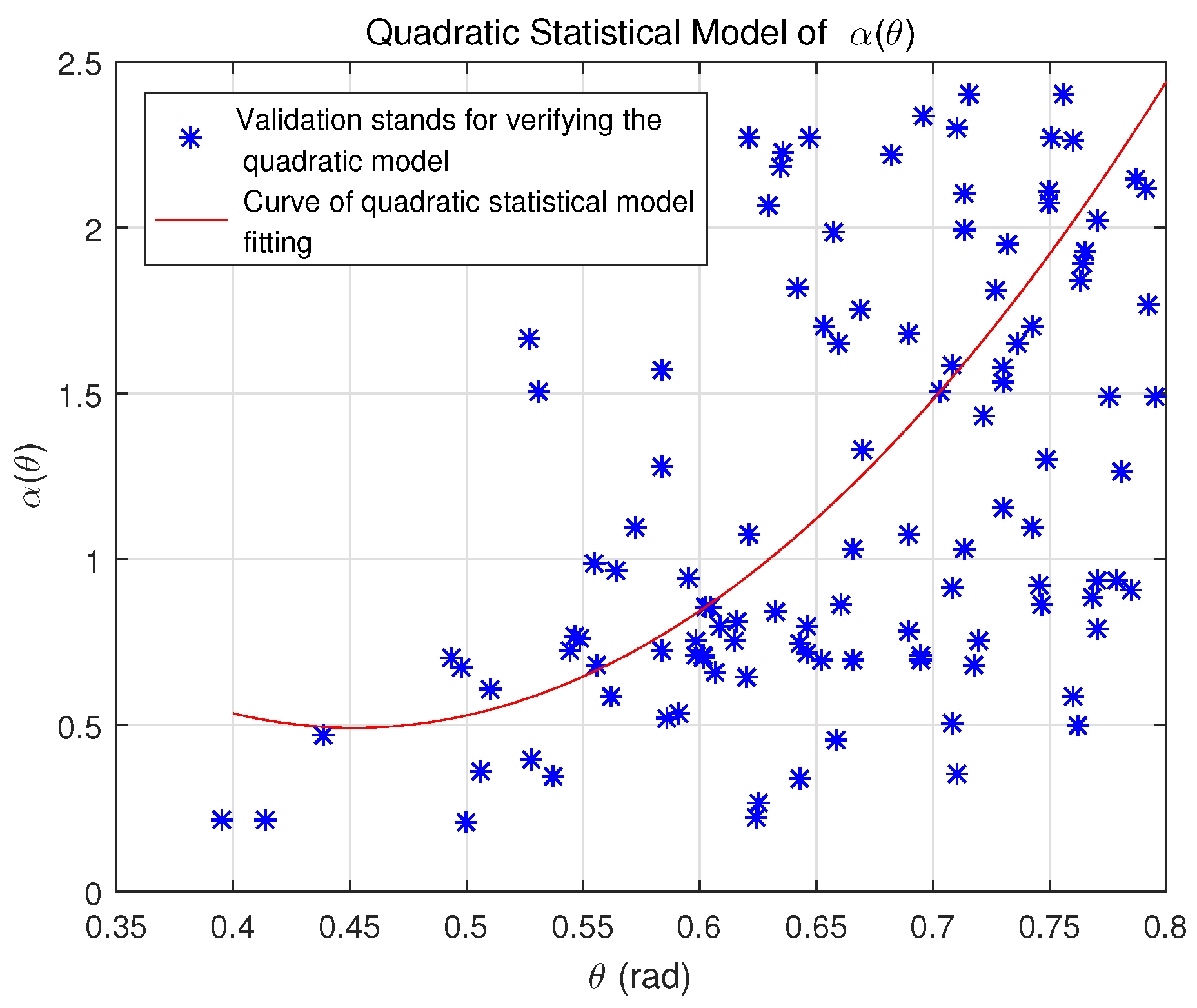
6.2. Establish Quadratic Statistical Model with E-SAR P-Band Pol-InSAR Data
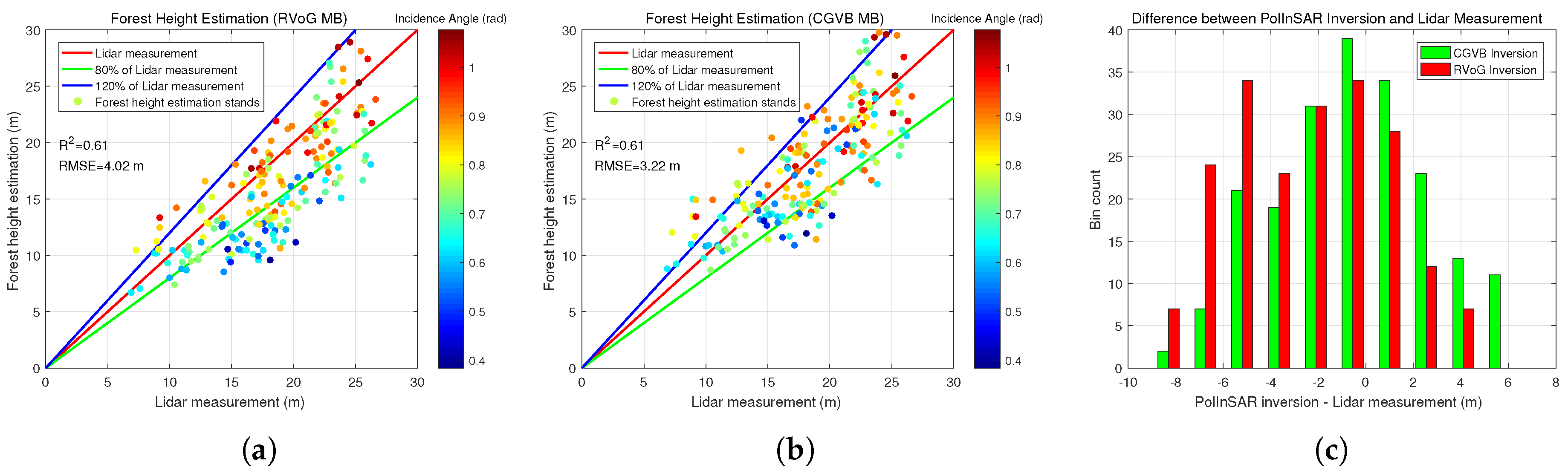
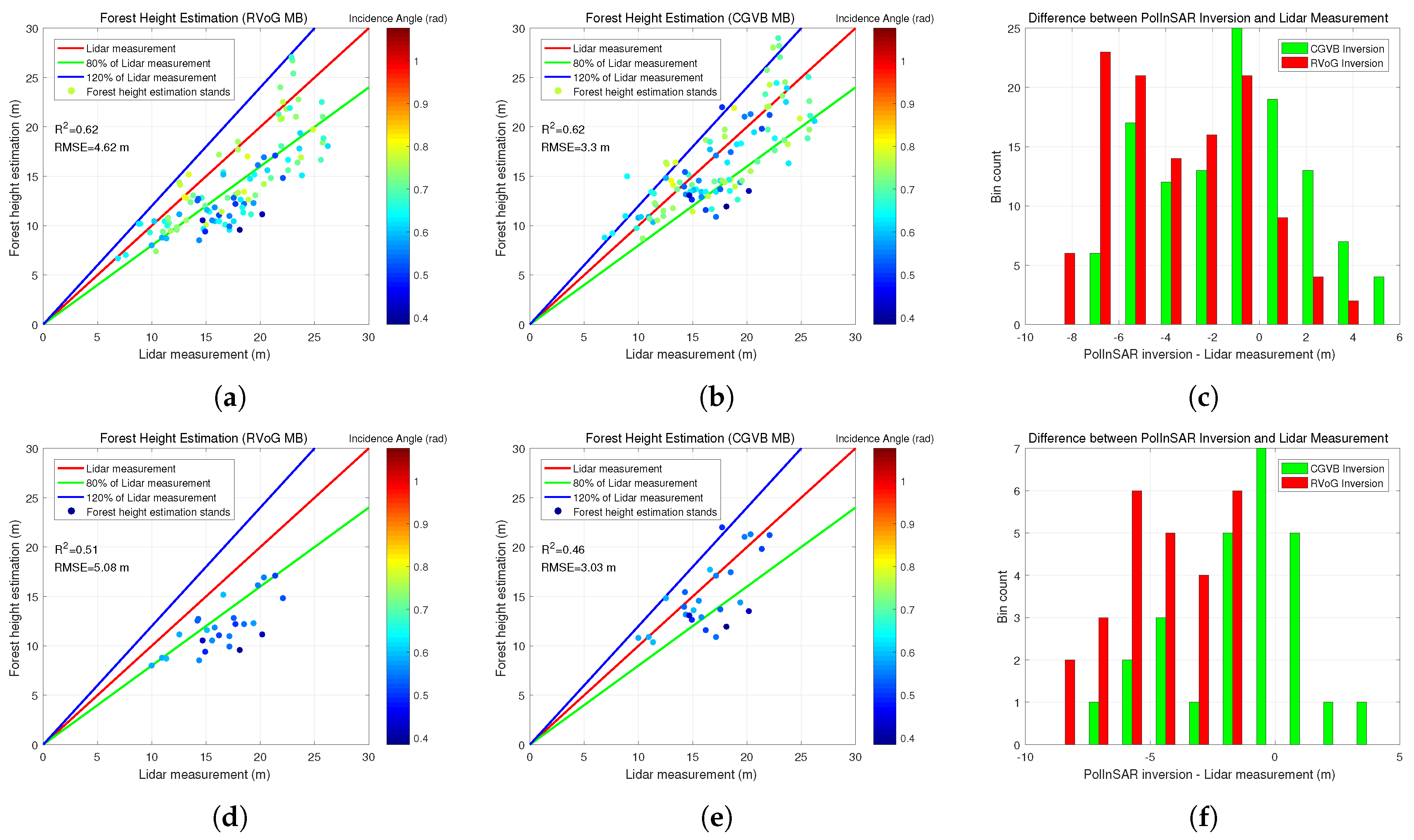
6.3. Forest Height Estimation
7. Discussion
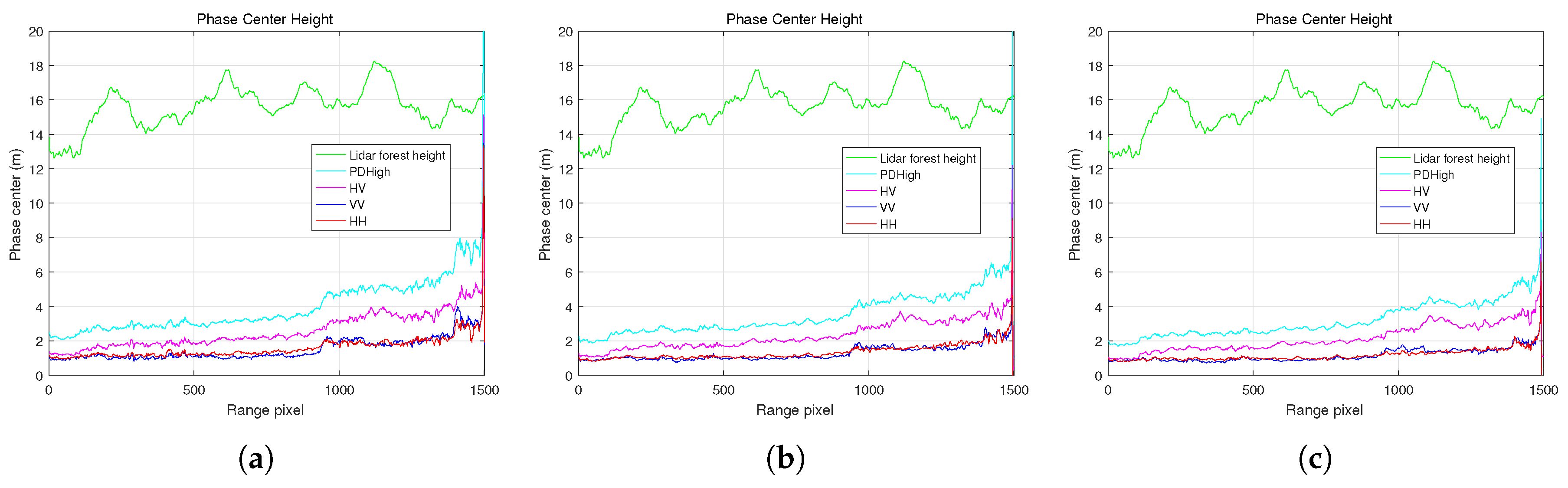
7.1. Phase Center Height of BIOSAR 2008 P-Band Pol-InSAR Data
7.2. Underestimation Based on RVoG Model
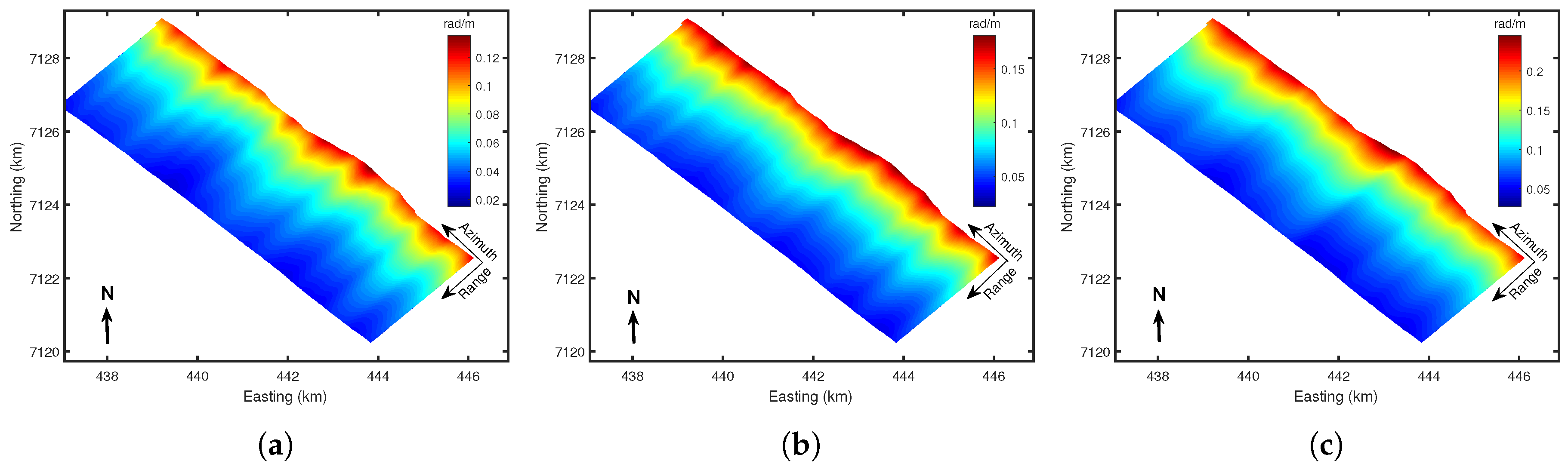
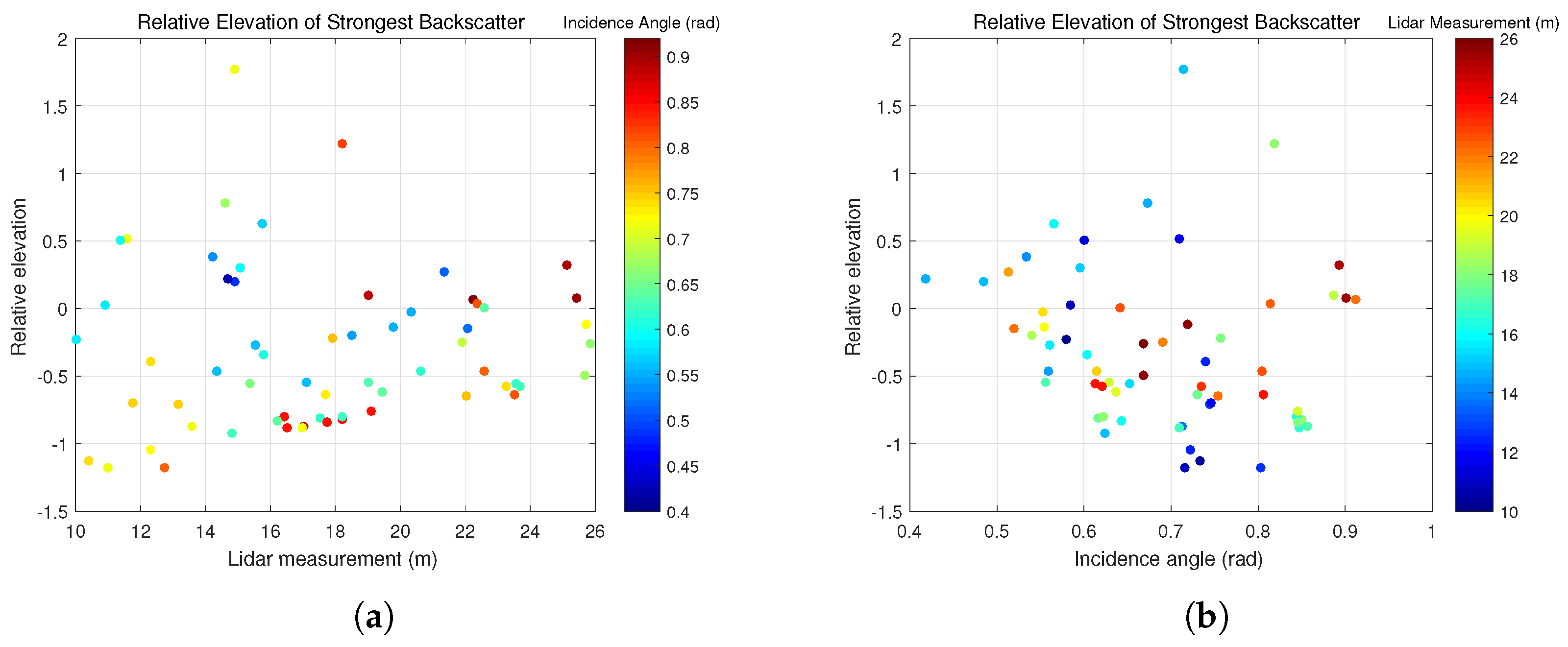
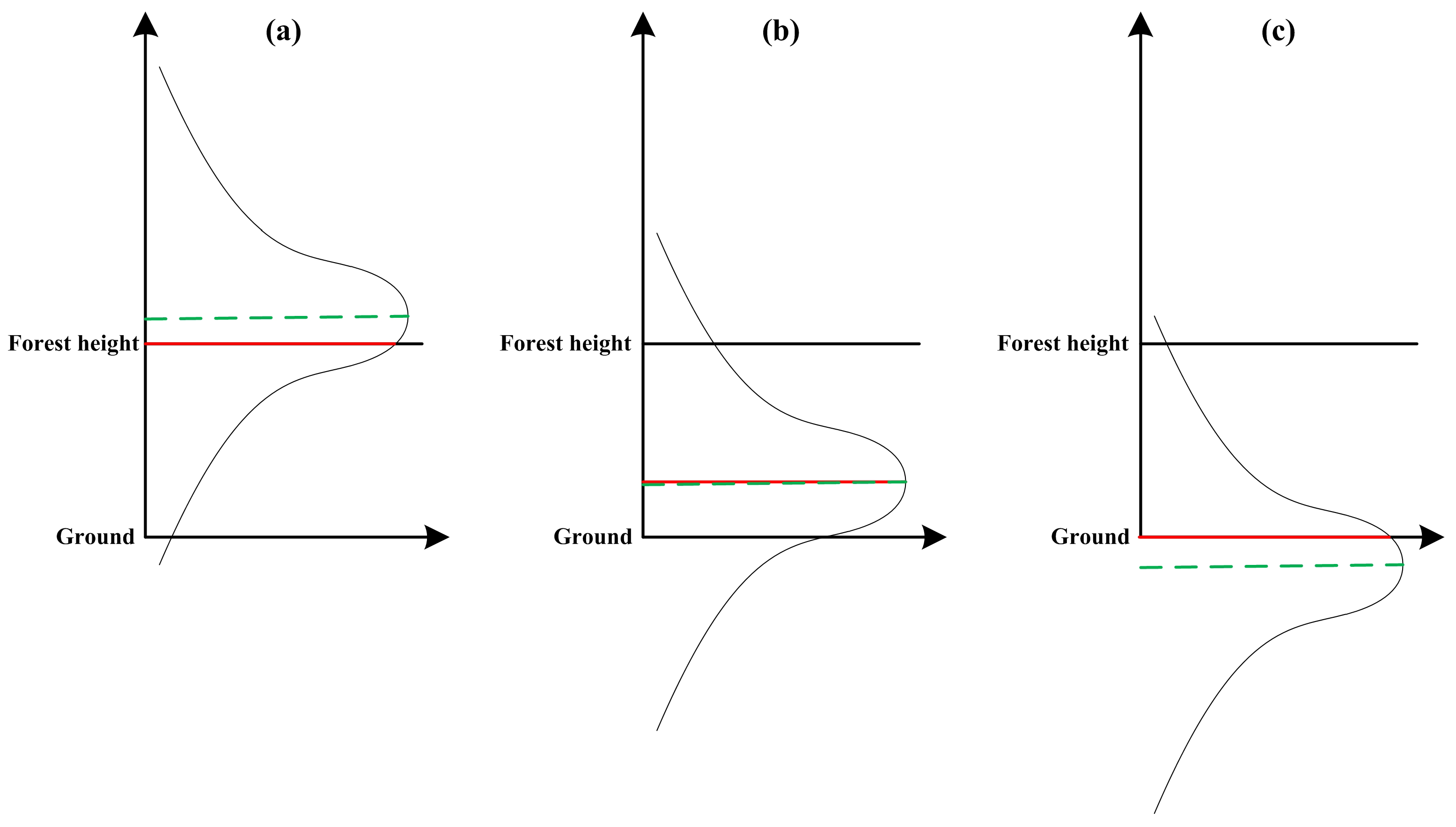
7.3. Influence of Incidence Angle on Vertical Backscatter Profile
7.4. Challenges and Promising Solutions for P-Band Pol-InSAR
7.5. Limitations of the Proposed Models and Methods
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Pol-InSAR | polarimetric interferometric synthetic aperture radar |
| GVB | Gaussian Vertical Backscatter |
| CGVB | constrained Gaussian Vertical Backscatter |
| RVoG | Random Volume over Ground |
| OVoG | Oriented Volume over Ground |
| VBP | vertical backscatter profile |
| GVR | ground-to-volume ratio |
| NGVR | null ground-to-volume ratio |
| RANSAC | Random Sample Consensus |
| SLBR | supervised learning based on RANSAC |
| LS | least squares |
| TLS | total least squares |
| WLS | weighted least squares |
| IWCLS | iterative weighted complex least squares |
| SB | single-baseline |
| MB | multi-baseline |
| BVF | backscattering vertical fluctuation |
| STDEV | standard deviation |
| PD | phase diversity |
| MD | magnitude diversity |
| RMSE | Root Mean Square Error |
References
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; Zyl, J.J.V. Vegetation characteristics and underlying topography from interferometric radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Siqueira, P.R. Vertical structure of vegetated land surfaces from interferometric and polarimetric radar. Radio Sci. 2000, 35, 141–177. [Google Scholar] [CrossRef] [Green Version]
- Garestier, F.; Duboisfernandez, P.C.; Guyon, D.; Toan, T.L. Forest biophysical parameter estimation using l- and p-band polarimetric sar data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3379–3388. [Google Scholar] [CrossRef]
- Garestier, F.; Toan, T.L. Vegetation modelling for height inversion using insar/pol-insar data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 2322–2325. [Google Scholar]
- Garestier, F.; Toan, T.L. Forest modeling for height inversion using single-baseline insar/pol-insar data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1528–1539. [Google Scholar] [CrossRef]
- Garestier, F.; Toan, T.L. Estimation of the backscatter vertical profile of a pine forest using single baseline p-band (pol-)insar data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3340–3348. [Google Scholar] [CrossRef]
- Kugler, F.; Lee, S.K.; Papathanassiou, K.P. Estimation of forest vertical structure parameter by means of multi-baseline pol-insar. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; pp. 721–724. [Google Scholar]
- Cloude, S.R. Polarization coherence tomography. Radio Science 2006, 41, 1–27. [Google Scholar] [CrossRef]
- Cloude, S.R. Dual-baseline coherence tomography. IEEE Geosci. Remote Sens. Lett. 2007, 4, 127–131. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-baseline polarimetric sar interferometry. Geosci. Remote Sens. IEEE Trans. 2001, 39, 2352–2363. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Three-stage inversion process for polarimetric sar interferometry. IEE Proc. Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef]
- Roueff, A.; Arnaubec, A.; Dubois-Fernandez, P.C.; Refregier, P. Cramercrao lower bound analysis of vegetation height estimation with random volume over ground model and polarimetric sar interferometry. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1115–1119. [Google Scholar] [CrossRef]
- Lee, S.K.; Kugler, F.; Hajnsek, I.; Papathanassiou, K. The potential and challenges of polarimetric sar interferometry techniques for forest parameter estimation at p-band. In Proceedings of the European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 503–505. [Google Scholar]
- Kugler, F.; Koudogbo, F.; Gutjahr, K.; Papathanassiou, K. Frequency effects in pol-insar forest height estimation. In Proceedings of the European Conference on Synthetic Aperture Radar, Dresden, Germany, 16–18 May 2006; pp. 1–4. [Google Scholar]
- Lavalle, M.; Khun, K. Three-baseline insar estimation of forest height. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1737–1741. [Google Scholar] [CrossRef]
- Neumann, M.; Ferro-Famil, L.; Reigber, A. Estimation of forest structure, ground, and canopy layer characteristics from multibaseline polarimetric interferometric sar data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1086–1104. [Google Scholar] [CrossRef]
- Lee, S.K.; Kugler, F.; Papathanassiou, K.; Hajnsek, I. Multibaseline polarimetric sar interferometry forest height inversion approaches. In Proceedings of the ESA POLinSAR Workshop, Frascati, Italy, 19–23 September 2011; pp. 1473–1477. [Google Scholar]
- Ferro-Famil, L.; Neumann, M.; Huang, Y. Multi-baseline pol-insar statistical techniques for the characterization of distributed media. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, IGARSS, Cape Town, South Africa, 12–17 July 2009; pp. 971–974. [Google Scholar]
- Treuhaft, R.N.; Cloude, S.R. The structure of oriented vegetation from polarimetric interferometry. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2620–2624. [Google Scholar] [CrossRef]
- Garestier, F.; Dubois-Fernandez, P.C.; Champion, I. Forest height inversion using high-resolution p-band pol-insar data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3544–3559. [Google Scholar] [CrossRef]
- Fu, H.; Wang, C.; Zhu, J.; Xie, Q.; Zhang, B. Estimation of pine forest height and underlying dem using multi-baseline p-band polinsar data. Remote Sens. 2016, 8, 820. [Google Scholar] [CrossRef]
- Fu, H.Q.; Wang, C.C.; Zhu, J.J.; Xie, Q.H.; Zhao, R. Inversion of vegetation height from polinsar using complex least squares adjustment method. Sci. China Earth Sci. 2015, 58, 1018–1031. [Google Scholar] [CrossRef]
- Miller, K.S. Complex linear least squares. Siam Rev. 1973, 15, 706–726. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline polarimetric sar tomography of a boreal forest at p- and l-bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-dimensional focusing with multipass sar data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar] [CrossRef]
- Cloude, S.R. Polarisation: Applications in Remote Sensing; Oxford University Press: New York, NY, USA, 2009. [Google Scholar]
- Seymour, M.S.; Cumming, I.G. Maximum likelihood estimation for sar interferometry. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS’94, Surface and Atmospheric Remote Sensing: Technologies, Data Analysis and Interpretation, Pasadena, CA, USA, 8–12 August 1994; Volume 4, pp. 2272–2275. [Google Scholar]
- Hajnsek, I.; Scheiber, R.; Keller, M.; Horn, R.; Lee, S.; Ulander, L.; Gustavsson, A.; Sandberg, G.; Toan, T.L.; Tebaldini, S. Biosar 2008: Final Report. 2009. Available online: https://earth.esa.int/c/document_library/get_file?folderId=21020&name=DLFE-903.pdf (accessed on 21 November 2018).
- Park, S.E.; Moon, W.M.; Pottier, E. Assessment of scattering mechanism of polarimetric sar signal from mountainous forest areas. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4711–4719. [Google Scholar] [CrossRef]
- Kugler, F.; Lee, S.K.; Hajnsek, I.; Papathanassiou, K.P. Forest height estimation by means of pol-insar data inversion: The role of the vertical wavenumber. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5294–5311. [Google Scholar] [CrossRef]
- Xie, Q.; Zhu, J.; Wang, C.; Fu, H.; Lopezsanchez, J.M.; Ballesterberman, J.D. A modified dual-baseline polinsar method for forest height estimation. Remote Sens. 2017, 9, 819. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. The effect of temporal decorrelation on the inversion of forest parameters from pol-insar data. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, IGARSS’03, Toulouse, France, 21–25 July 2003; pp. 1429–1431. [Google Scholar]
- Lavalle, M.; Simard, M.; Hensley, S. A temporal decorrelation model for polarimetric radar interferometers. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2880–2888. [Google Scholar] [CrossRef]
- Tabb, M.; Orrey, J.; Flymn, T.; Carande, R. Phase diversity: A decomposition for vegetation parameter estimation using polarimetric SAR interferometry. In Proceedings of the EUSAR 2002, Cologne, Germany, 4–6 June 2002; pp. 721–724. [Google Scholar]
- Managhebi, T.; Maghsoudi, Y.; Zoej, M.J.V. An improved three-stage inversion algorithm in forest height estimation using single-baseline polarimetric sar interferometry data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 887–891. [Google Scholar] [CrossRef]
- Managhebi, T.; Maghsoudi, Y.; Zoej, M.J.V. Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data. Remote Sens. 2018, 10, 1174. [Google Scholar] [CrossRef]
- Lee, S.K.; Fatoyinbo, T.E.; Lagomasino, D.; Feliciano, E.; Trettin, C. Multibaseline tandem-x mangrove height estimation: The selection of the vertical wavenumber. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Flynn, T.; Tabb, M.; Carande, R. Coherence region shape extraction for vegetation parameter estimation in polarimetric sar interferometry. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, IGARSS’02, Valencia, Spain, 22–27 July 2002; Volume 5, pp. 2596–2598. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Track | Baseline (m) | Range | Band | Polarization |
|---|---|---|---|---|
| 08biosar0103 | Master | Master | P | Quad |
| 08biosar0107 | 16 | 0.014–0.135 | P | Quad |
| 08biosar0109 | 24 | 0.021–0.181 | P | Quad |
| 08biosar0111 | 32 | 0.026–0.245 | P | Quad |
| Lidar Forest Height (m) | |||||
|---|---|---|---|---|---|
| Number of stands | 10 | 39 | 74 | 62 | 15 |
| RMSE (RVoG) (m) | 2.23 | 2.72 | 4.38 | 4.26 | 4.8 |
| RMSE (CGVB) (m) | 3.85 | 1.99 | 3.24 | 3.57 | 3.68 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, B.; Xiang, M.; Jiang, S.; Fu, X. Forest Height Estimation Based on Constrained Gaussian Vertical Backscatter Model Using Multi-Baseline P-Band Pol-InSAR Data. Remote Sens. 2019, 11, 42. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010042
Sun X, Wang B, Xiang M, Jiang S, Fu X. Forest Height Estimation Based on Constrained Gaussian Vertical Backscatter Model Using Multi-Baseline P-Band Pol-InSAR Data. Remote Sensing. 2019; 11(1):42. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010042
Chicago/Turabian StyleSun, Xiaofan, Bingnan Wang, Maosheng Xiang, Shuai Jiang, and Xikai Fu. 2019. "Forest Height Estimation Based on Constrained Gaussian Vertical Backscatter Model Using Multi-Baseline P-Band Pol-InSAR Data" Remote Sensing 11, no. 1: 42. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010042