Global Ionospheric Model Accuracy Analysis Using Shipborne Kinematic GPS Data in the Arctic Circle

 , , ,
, , ,
Abstract
:
1. Introduction
2. Mathematic Models, Data Sets, and Analysis Methods
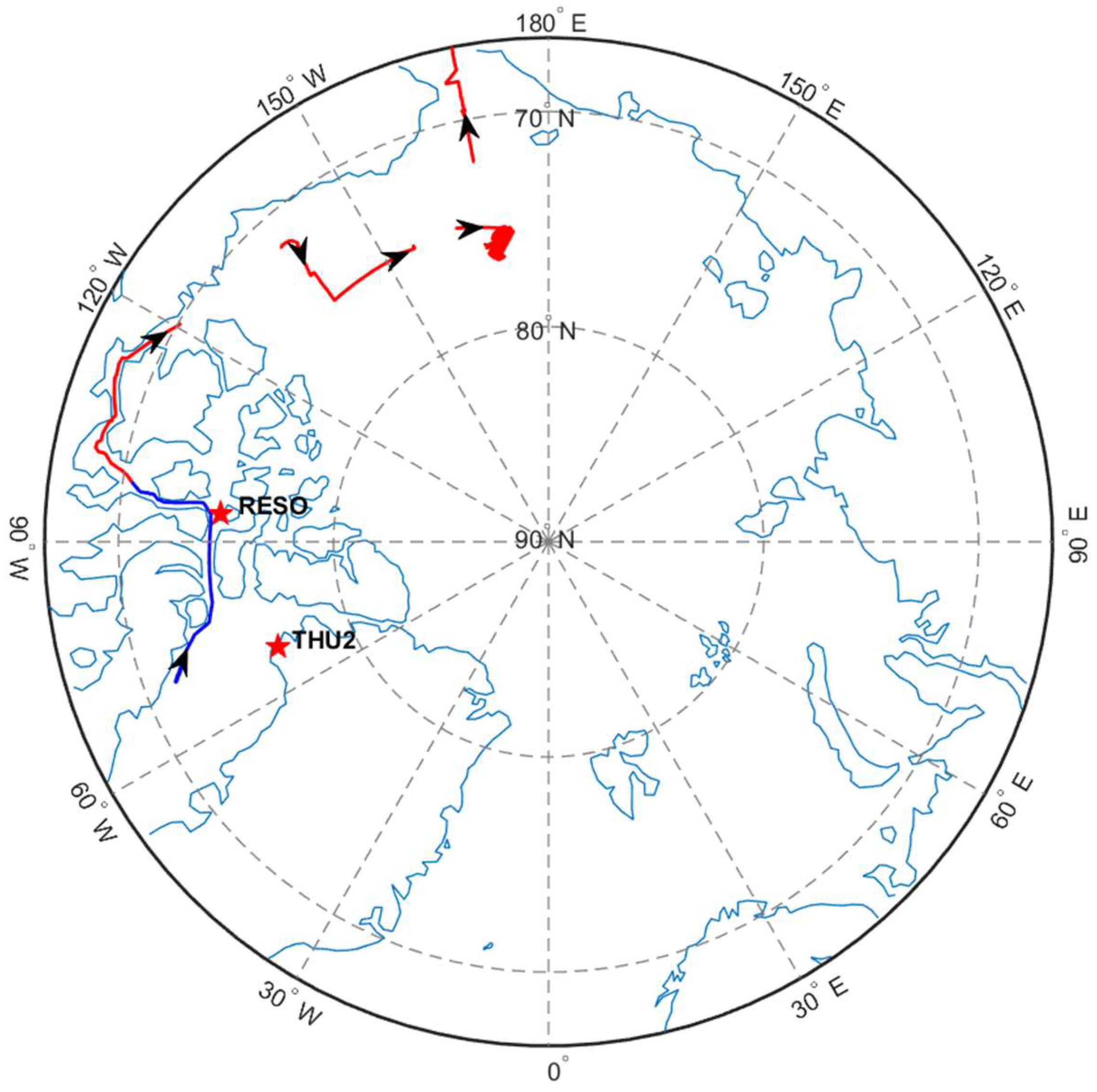
2.1. Shipborne Kinematic GPS Data from the Arctic Research Expeditions
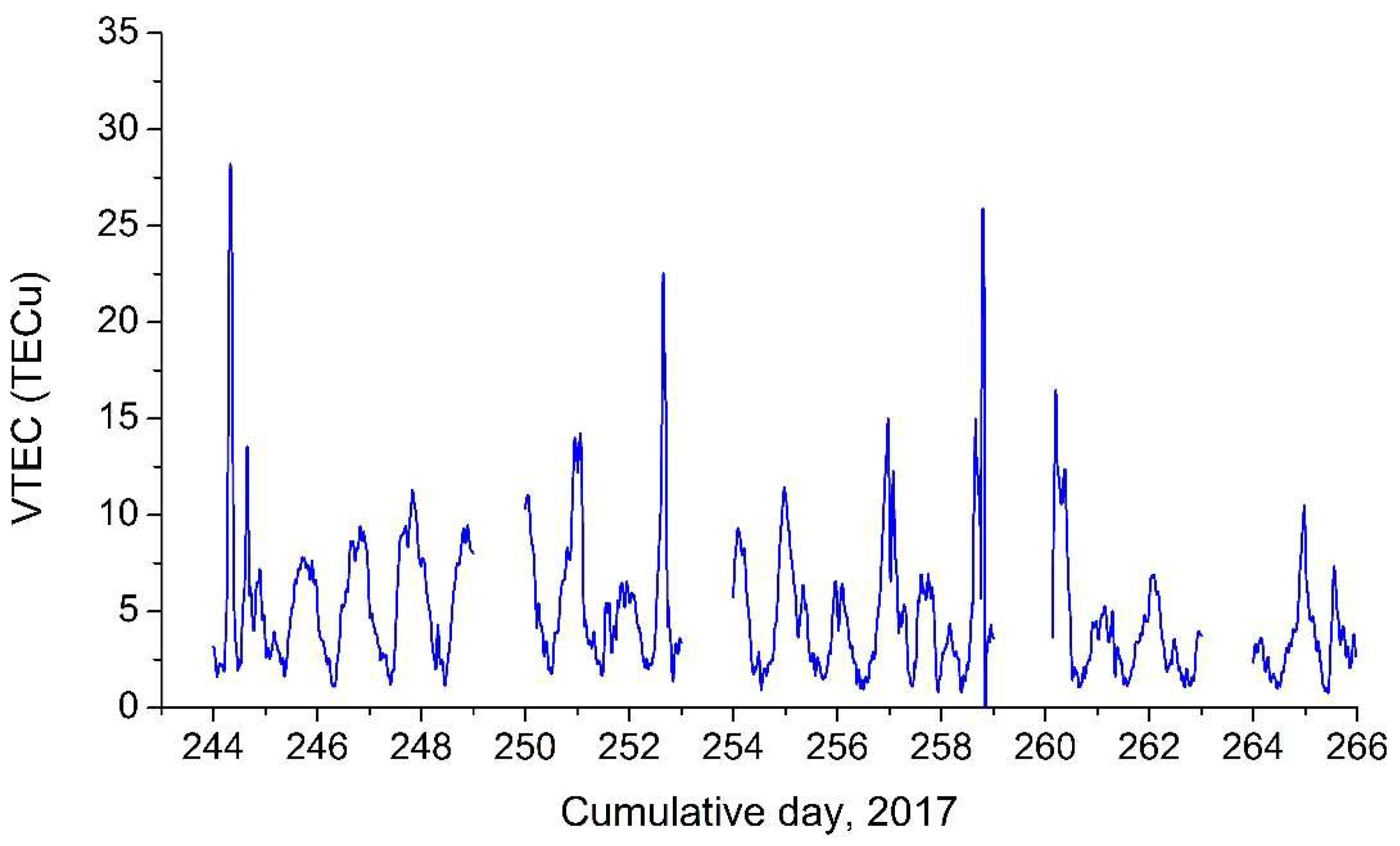
2.2. Ionospheric TEC Information Extracted from Dual-Frequency GPS Data
2.3. Estimation of Kinematic GPS-Difference Code Biases of the Receiver
3. Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yuan, Y. Study on Theories and Methods of Correcting Ionospheric Delay and Monitoring Ionosphere Based on GPS. Ph.D. Dissertation, Institute of Geodesy and Geophysics Chinese Academy of Sciences, the Graduate School of the Chinese Acadmy of Science, Wuhan, China, May 2002. [Google Scholar]
- Kim, E.; Walter, T.; Powell, J. Adaptive carrier smoothing using code and carrier divergence. Proc. ION NTM 2007, January, 22–24. [Google Scholar]
- Pi, X.; Iijima, B.; Lu, W. Effects of Ionospheric Scintillation on GNSS-Based Positioning. J. Inst. Navig. 2017, 64, 3–22. [Google Scholar] [CrossRef]
- Lee, J.; Morton, Y.; Lee, J.; Moon, H.; Seo, J. Monitoring and Mitigation of Ionospheric Anomalies for GNSS-Based Safety Critical Systems: A review of up-to-date signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 96–110. [Google Scholar] [CrossRef]
- Park, B.; Lim, C.; Yun, Y.; Kim, E.; Kee, C. Optimal Divergence-Free Hatch Filter for GNSS Single-Frequency Measurement. Sensors 2017, 17, 448. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Ou, J. An Improvement To Ionospheric Delay Correction For Single Frequency GPS user—the APR-I Scheme. J. Geodesy 2001, 75, 331–336. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The BeiDou Global Broadcast Ionospheric Delay Correction Model (BDGIM) and Its Preliminary Performance Evaluation Results. NAVIGATION 2019, 66, 55–69. [Google Scholar] [CrossRef]
- Lanyi, G.; Roth, T. A comparison of mapped and measured total ionospheric electron content using global positioning system and beacon satellite observations. Radio Sci. 1988, 23, 483–492. [Google Scholar] [CrossRef]
- Mannucci, A.; Wilson, B.; Yuan, D.; Ho, C.; Lindqwister, U.; Runge, T. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph.D. Thesis, Astronomical Institute, University of Berne, Bern, Switzerland, 1999. [Google Scholar]
- Yuan, Y.; Ou, J. Auto-Covariance Estimation of Variable Samples (ACEVS) and Its Application for Monitoring Random Ionosphere Using GPS. J. Geodesy 2001, 75, 438–447. [Google Scholar] [CrossRef]
- Feltens, J. Development of a new three-dimensional mathematical ionosphere model at European space agency/European space operations centre. Space Weather 2007, 5, 1–17. [Google Scholar] [CrossRef]
- Yuan, Y.; Huo, X.; Ou, J. Models and Methods for precise determination of ionospheric delays using GPS. Prog. Nat. Sci. 2007, 17, 187–196. [Google Scholar] [CrossRef]
- Dyrud, L.; Jovancevic, A.; Brown, A.; Wilson, D.; Ganguly, S. Ionospheric measurement with GPS. Radio Sci. 2008, 43, 4159–5165. [Google Scholar] [CrossRef]
- Yuan, Y.; Tscherning, C.; Knudsen, P.; Xu, G.; Ou, J. The ionospheric eclipse factor method (IEFM) and its application to determining the ionospheric delay for GPS. J. Geodesy 2008, 82, 1–8. [Google Scholar] [CrossRef]
- Ke, F.; Wang, J.; Tu, M.; Wang, X.; Wang, X.; Zhao, X.; Deng, J. Morphological characteristics and coupling mechanism of the ionospheric disturbance caused by Super Typhoon Sarika in 2016. Adv. Space Res. 2018, 62, 1137–1145. [Google Scholar] [CrossRef]
- Wang, C.; Shi, C.; Fan, L.; Zhang, H. Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information. Remote Sens. 2018, 10, 63. [Google Scholar] [CrossRef]
- Mannucci, A.; Iijima, B.; Lindqwister, U.; Pi, X.; Sparks, L.; Wilson, B. GPS and Ionosphere: Review of Radio Science 1996-1999; Oxford Univ. Press: New York, NY, USA, 1999. [Google Scholar]
- Hernández-Pajares, M. Performance of IGS Ionosphere TEC Maps; Technical University of Catalonia: Barcelona, Spain, 2003. [Google Scholar]
- Hernández-Pajares, M. IGS Ionosphere WG Status Report: Performance of IGS Ionosphere TEC Maps; IGS Workshop: Bern, Switzerland, 2004. [Google Scholar]
- Luo, X.; Xu, H.; Li, Z.; Zhang, T.; Gao, J.; Shen, Z.; Yang, C.; Wu, Z. Accuracy assessment of the global ionospheric model over the Southern Ocean based on dynamic observation. J. Atmos. Sol. Terr. Phys. 2017, 154, 127–131. [Google Scholar] [CrossRef]
- Dettmering, D.; Limberger, M.; Schmidt, M. Using DORIS measurements for modeling the vertical total electron content of the Earth’s ionosphere. J. Geod. 2014, 88, 1131–1143. [Google Scholar] [CrossRef]
- Brunini, C.; Meza, A.; Bosch, W. Temporal and spatial variability of the bias between TOPEX- and GPS-derived total electron content. J. Geod. 2005, 79, 175–188. [Google Scholar] [CrossRef]
- Chen, P.; Yao, W.; Zhu, X. Combination of Ground- and Space-Based Data to Establish a Global Ionospheric Grid Model. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1073–1081. [Google Scholar] [CrossRef]
- Meng, Y.; Wang, Z.M. Research of Polar TEC fluctuations and polar patches during magnetic storm using GPS. Chin. J. Geophy. 2008, 51, 17–24. [Google Scholar]
- Liu, Y.; Wang, J.; Zhang, C. Study of GNSS Loss of Lock Characteristics under Ionosphere Scintillation with GNSS Data at Weipa (Australia) During Solar Maximum Phase. Sensors 2017, 17, 2205. [Google Scholar] [CrossRef] [PubMed]
- Mitchell, C.; Alfonsi, L.; De Franceschi, G.; Lester, M.; Romano, V.; Wernik, A. GPS TEC and scintillation measurements from the polar ionosphere during the October 2003 storm. Geophys. Res. Lett. 2005, 32, L12S03. [Google Scholar] [CrossRef]
- Jayachandran, P.; Langley, R.; MacDougall, J.; Mushini, S.; Pokhotelov, D.; Hamza, A.; Mann, I.; Milling, D.; Kale, Z.; Chadwick, R.; et al. Canadian High Arctic Ionospheric Network (CHAIN). Radio Sci. 2009, 44, 1. [Google Scholar] [CrossRef]
- El-Arini, M.; Secan, J.; Klobuchar, J.; Doherty, P.; Bishop, G.; Groves, K. Ionospheric effects on GPS signals in the Arctic region using early GPS data from Thule, Greenland. Radio Sci. 2009, 44, 1–14. [Google Scholar] [CrossRef]
- Feltens, J. The International GPS Service (IGS) ionosphere working group. Adv. Space Res. 2003, 31, 205–214. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Mannucci, A.; Wilson, B.; Edwards, C. A new method for monitoring the Earth ionosphere total electron content using the GPS global network. In Proceedings of the 1993 ION GPS-93, Salt Lake City, UT, USA, 22–24 September 1993. [Google Scholar]
- Lee, C.; Lee, D.; Chung, N.; Chang, I.; Kawai, E.; Takahashi, F. Development of a GPS Codeless Receiver for Ionospheric Calibration and Time Transfer. IEEE Trans. Instrum. Meas. 1993, 42, 494–497. [Google Scholar] [CrossRef]
- Caciotta, M.; Leccese, F.; Piuzzi, E. Study of a new GPS-carriers based time reference with high instantaneous accuracy. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xian, China, 16–18 August 2007; pp. 11–14. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Li, H.; Ou, J.; Huo, X. Two-step method for the determination of the differential code biases of COMPASS satellites. J. Geod. 2012, 86, 1059–1076. [Google Scholar] [CrossRef]
- Yuan, Y.; Ou, J. A generalized trigonometric series function model for determining ionospheric delay. Prog. Nat. Sci. 2004, 14, 1010–1014. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Wang, N.; Hernández-Pajares, M.; Huo, X. SHPTS: Towards a new method for generating precise global ionospheric TEC map based on spherical harmonic and generalized trigonometric series functions. J. Geod. 2015, 89, 331–345. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
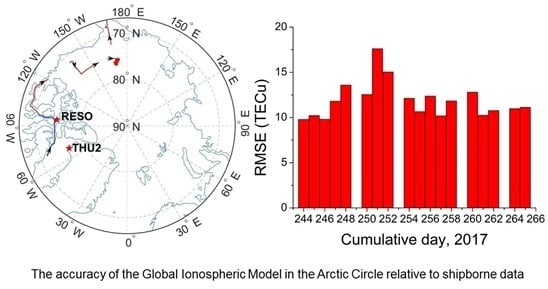
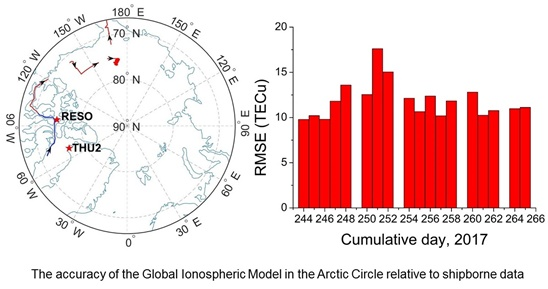
| Day | 1 | 2 | 3 | 4 | 5 | 7 | 8 |
| RMSE | 9.79 | 10.21 | 9.80 | 11.81 | 13.95 | 12.54 | 17.61 |
| Day | 9 | 11 | 12 | 13 | 14 | 15 | 17 |
| RMSE | 15.04 | 12.13 | 10.65 | 12.37 | 10.19 | 11.83 | 12.81 |
| Day | 18 | 19 | 21 | 22 | Total | ||
| RMSE | 10.25 | 10.77 | 10.98 | 11.12 | 12.02 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Luo, X.; Wang, J.; Gao, J.; Zhang, T.; Wu, Z.; Yang, C.; Wu, Z. Global Ionospheric Model Accuracy Analysis Using Shipborne Kinematic GPS Data in the Arctic Circle. Remote Sens. 2019, 11, 2062. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11172062
Wang D, Luo X, Wang J, Gao J, Zhang T, Wu Z, Yang C, Wu Z. Global Ionospheric Model Accuracy Analysis Using Shipborne Kinematic GPS Data in the Arctic Circle. Remote Sensing. 2019; 11(17):2062. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11172062
Chicago/Turabian StyleWang, Di, Xiaowen Luo, Jinling Wang, Jinyao Gao, Tao Zhang, Ziyin Wu, Chunguo Yang, and Zhaocai Wu. 2019. "Global Ionospheric Model Accuracy Analysis Using Shipborne Kinematic GPS Data in the Arctic Circle" Remote Sensing 11, no. 17: 2062. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11172062