Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness


Abstract
:
1. Introduction
2. Conventional AIS-SAR Matching Method
2.1. AIS Data Format, Interpretation, and Interpolation
- fixed, or static information, which is entered into the AIS on installation and needs to be changed only if the ship changes its name or undergoes a major conversion from one type to another;
- dynamic information, which, apart from ‘Navigational status’ information, is automatically updated by the onboard sensors connected to the AIS;
- voyage-related information, which might need to be manually entered and updated during the voyage.
- time stamp in Coordinated Universal Time (UTC);
- latitude and longitude in degrees;
- speed over ground in knots;
- heading in clockwise degrees with respect to North direction.
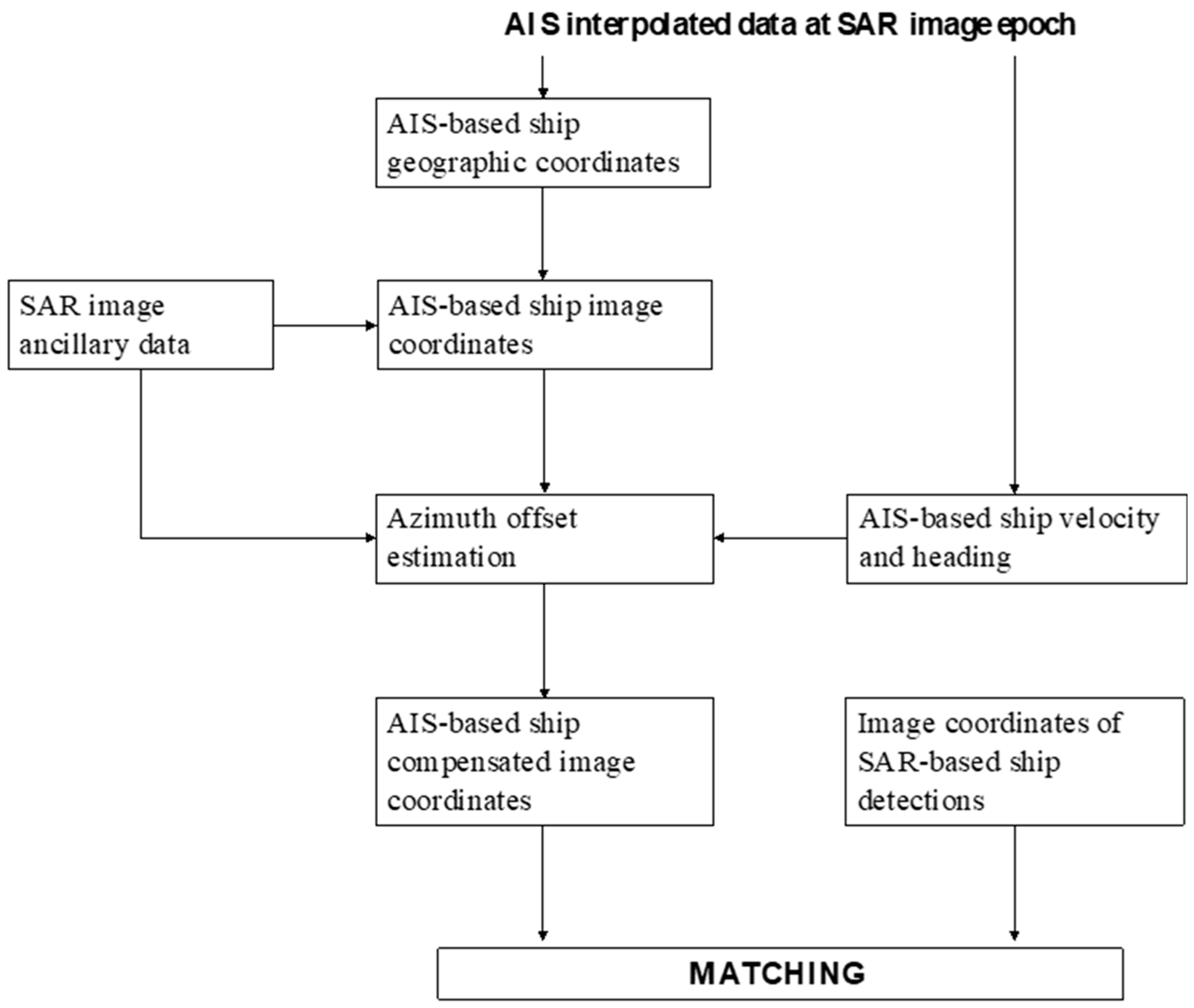
2.2. AIS-Based Matching Technique
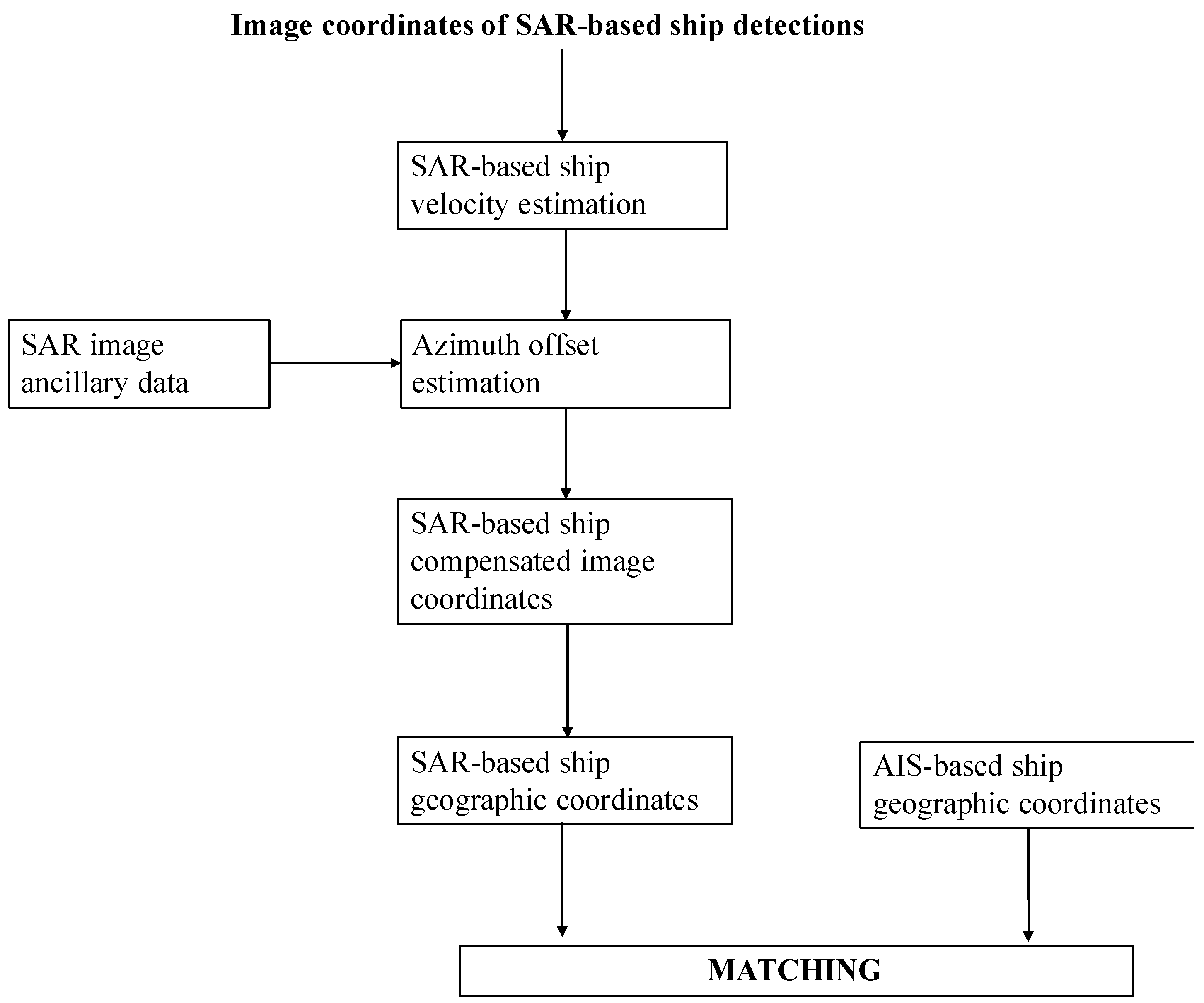
3. Proposed AIS-SAR Matching Method
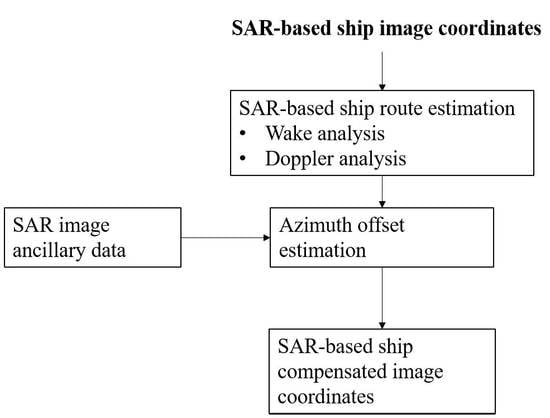
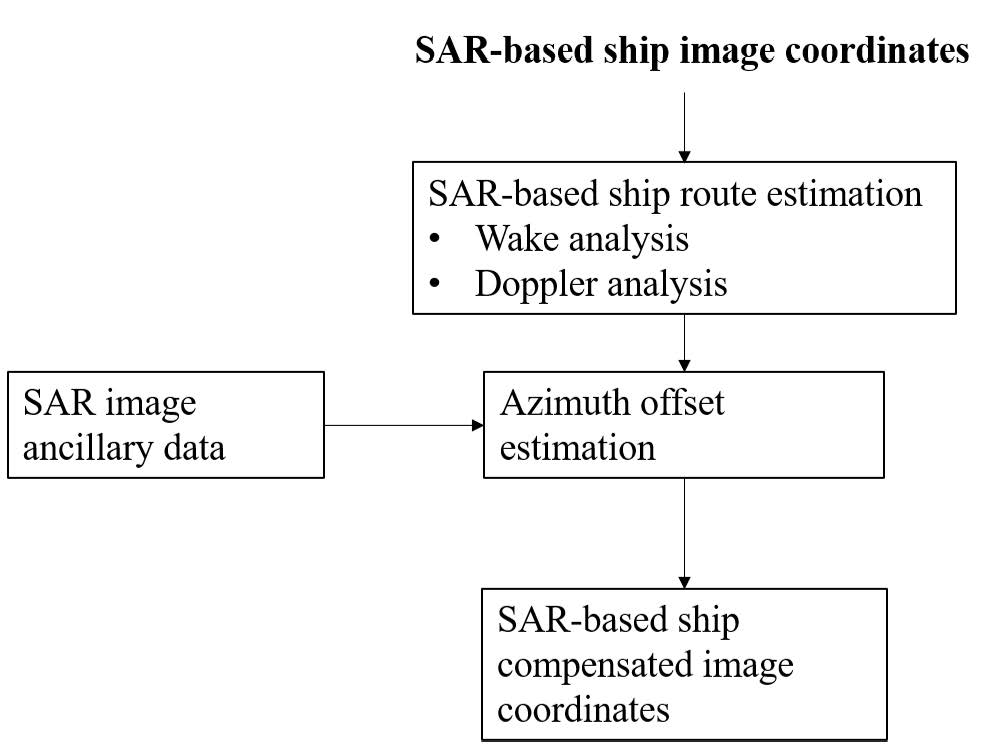
3.1. SAR-Based Matching Technique
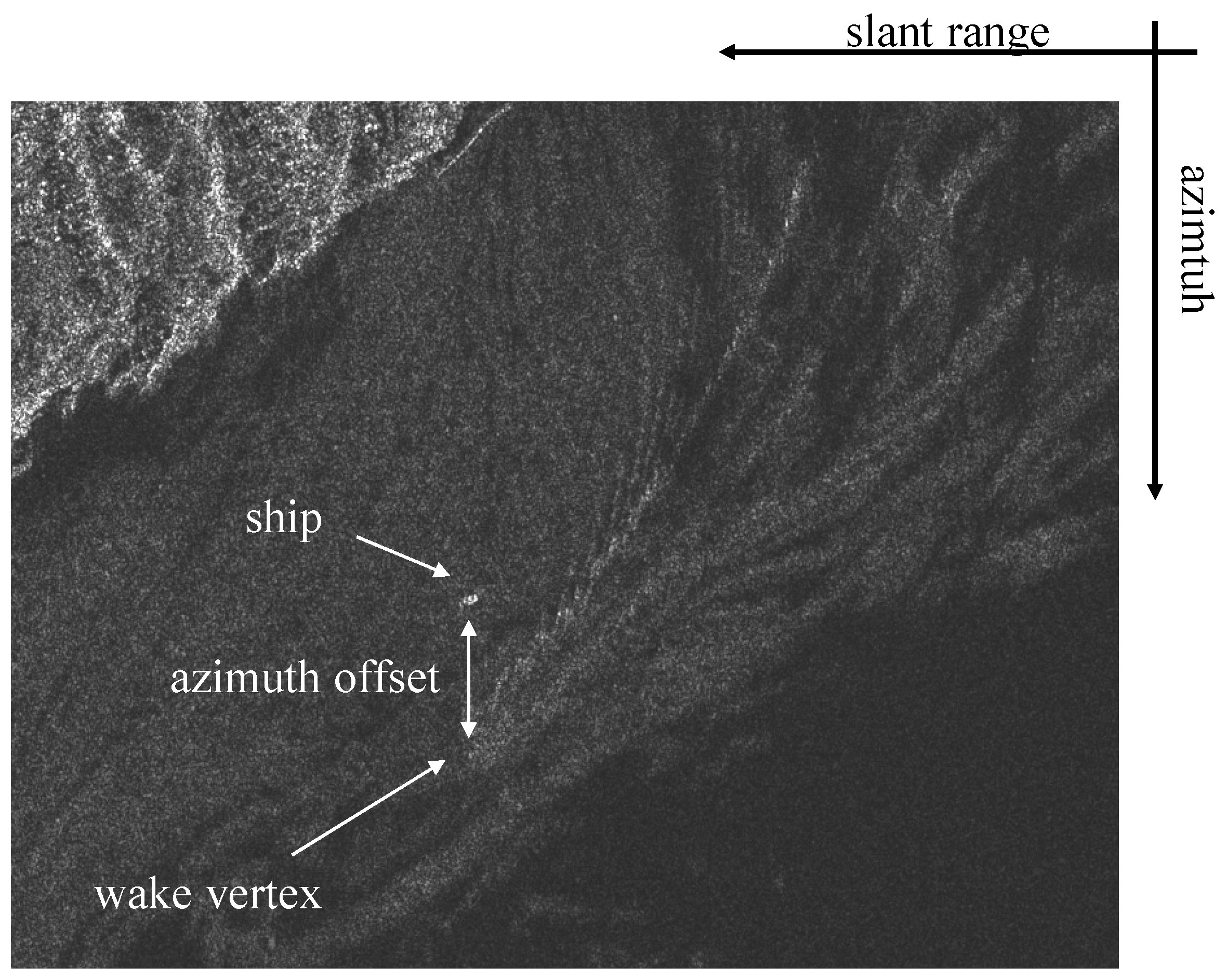
3.2. Ship Velocity Estimation in Single-Channel SAR Data
4. Case Study and Experimental Results
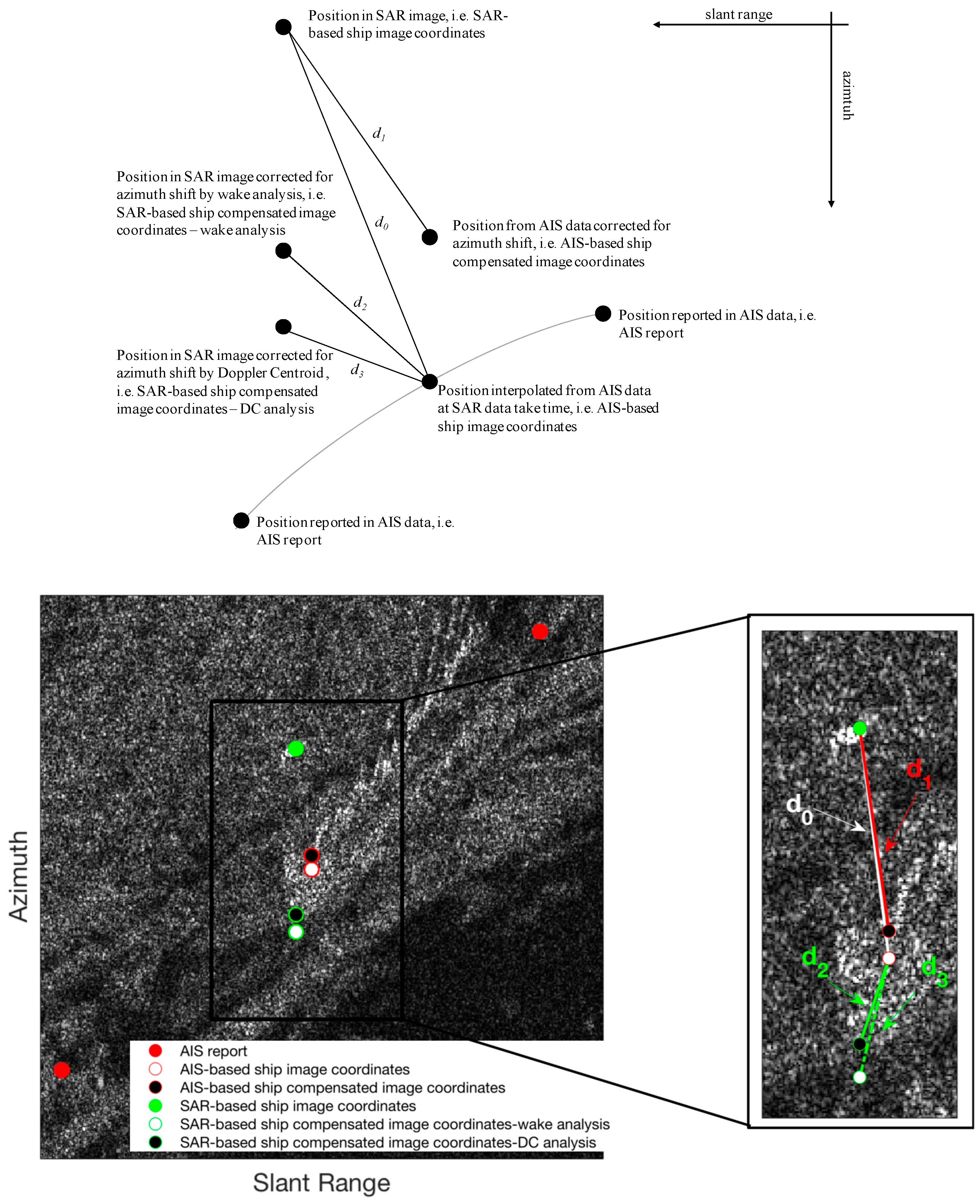
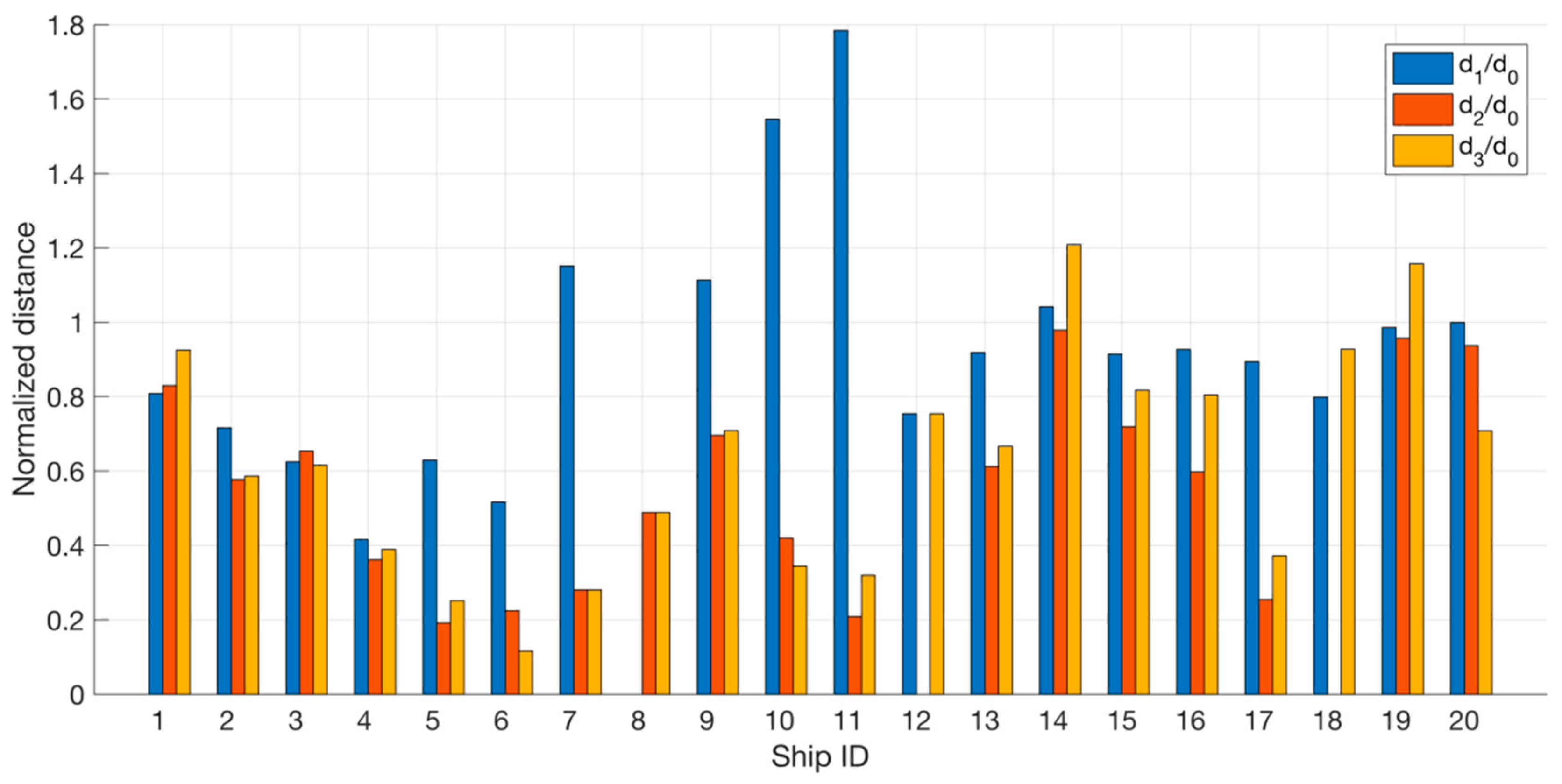
- d0 is the distance between the ship feature detected in the SAR image and the AIS-based ship geographic coordinates obtained by interpolation at SAR data take time. The distance is representative of the case in which no motion compensation is applied, that is the azimuth offset is ignored.
- d1 is the distance between the ship feature detected in the SAR image and the AIS-based ship compensated image coordinates converted in the geographical reference frame. The distance is representative of the conventional method for AIS-SAR data matching (Figure 2).
- d2 is the distance between the ship feature detected in the SAR image, compensated for the azimuth offset by wake-based route estimation, and AIS-based ship geographic coordinates.
- d3 is the distance between the ship feature detected in the SAR image, compensated for the azimuth offset by DC analysis, and AIS-based ship geographic coordinates.
- -
- d1 is computed for 19 ships out of 20 because the heading value of ship #8 at the epoch of image #1 was 511, i.e., not available data;
- -
- d2 is available for 18 ships out of 20 because even if ship #12 and ship #18 show a distinguishable wake, the wake-based velocity estimation is not allowed for them due to their positions. In fact, the ships are too close to the image border and it is not possible to define a tile of suitable dimensions to run wake-based velocity estimation algorithms.
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- McIver, R.; Breeze, H.; Devred, E. Satellite remote-sensing observations for definitions of areas for marine conservation: Case study of the Scotian Slope, Eastern Canada. Remote Sens. Environ. 2018, 214, 33–47. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, C.; Sun, C.; Zhan, W.; Sun, S.; Xu, B.; Dong, Y. Assessment of offshore oil/gas platform status in the northern Gulf of Mexico using multi-source satellite time-series images. Remote Sens. Environ. 2018, 208, 63–81. [Google Scholar] [CrossRef]
- Alpers, W.; Holt, B.; Zeng, K. Oil spill detection by imaging radars: Challenges and pitfalls. Remote Sens. Environ. 2017, 201, 133–147. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Back, M.; Kim, D.; Kim, S.W.; Won, J.S. Two-Dimensional Ship Velocity Estimation Based on KOMPSAT-5 Synthetic Aperture Radar Data. Remote Sens. 2019, 11, 1474. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef]
- AIS-International Maritime Organization. Available online: http://www.imo.org/en/OurWork/Safety/Navigation/Pages/AIS.aspx (accessed on 17 January 2019).
- Shepperson, J.L.; Hintzen, N.T.; Szostek, C.L.; Bell, E.; Murray, L.G.; Kaiser, M.J. A comparison of VMS and AIS data: The effect of data coverage and vessel position recording frequency on estimates of fishing footprints. ICES J. Mar. Sci. 2018, 75, 988–998. [Google Scholar] [CrossRef]
- Ouchi, K. Recent Trend and Advance of Synthetic Aperture Radar with Selected Topics. Remote Sens. 2013, 5, 716–807. [Google Scholar] [CrossRef] [Green Version]
- Greidanus, H. Satellite imaging for maritime surveillance of the European seas. In Remote Sensing of the European Seas; Springer: Dordrecht, The Netherlands, 2008; ISBN 9781402067716. [Google Scholar]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; DSTO-RR-0272; DSTO Information Sciences Laboratoty: Edinbutgh, Australia, 2004; p. 115. [Google Scholar]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; Van Schie, B. Ship surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1092–1103. [Google Scholar] [CrossRef]
- Zou, Z.; Shi, Z. Ship Detection in Spaceborne Optical Image with SVD Networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5832–5845. [Google Scholar] [CrossRef]
- Pichel, W.G.; Clemente-Colón, P.; Wackerman, C.C.; Friedman, K.S. Ship and Wake Detection in SAR Marine Users Manual; National Oceanic and Atmospheric Administration: Washington, DC, USA, 2004.
- Reggiannini, M.; Bedini, L. Multi-Sensor Satellite Data Processing for Marine Traffic Understanding. Electronics 2019, 8, 152. [Google Scholar] [CrossRef]
- Xu, F.; Liu, J.; Sun, M.; Zeng, D.; Wang, X. A Hierarchical Maritime Target Detection Method for Optical Remote Sensing Imagery. Remote Sens. 2017, 9, 280. [Google Scholar] [CrossRef]
- Pelich, R.; Longépé, N.; Mercier, G.; Hajduch, G.; Garello, R. AIS-Based Evaluation of Target Detectors and SAR Sensors Characteristics for Maritime Surveillance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3892–3901. [Google Scholar] [CrossRef]
- Zou, Z.Z.; Ji, K.F.; Xing, X.W.; Zou, H.X. Effective Association of SAR and AIS Data Using Non-Rigid Point Pattern Matching. IOP Conf. Ser. Earth Environ. Sci. 2014, 17, 012258. [Google Scholar]
- Youden, J.; Yue, B. AIS-SAR Data Association Algorithms; Report R-14-111-1213; CCORE: St. John’s, NL, Canada, 2015. [Google Scholar]
- Zhang, D.; Li, J.; Wu, Q.; Liu, X.; Chu, X.; He, W. Enhance the AIS data availability by screening and interpolation. In Proceedings of the 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 981–986. [Google Scholar]
- Hintzen, N.T.; Piet, G.J.; Brunel, T. Improved estimation of trawling tracks using cubic Hermite spline interpolation of position registration data. Fish. Res. 2010, 101, 108–115. [Google Scholar] [CrossRef]
- Hu, Q.; Cai, F.; Yang, C.; Shi, C. An Algorithm for Interpolating Ship Motion Vectors. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2014, 8, 35–40. [Google Scholar] [CrossRef]
- Nguyen, V.; Im, N.-K.; Lee, S. The Interpolation Method for the missing AIS Data of Ship. J. Navig. Port. Res. 2015, 39, 377–384. [Google Scholar] [CrossRef] [Green Version]
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, 3, 499–505. [Google Scholar] [CrossRef]
- Barbarossa, S. Detection and imaging of moving objects with synthetic aperture radar. 1. Optimal detection and parameter estimation theory. IEE Proc. F Radar Signal Process. 1992, 139, 79–88. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Ender, J.H.G. Space-time processing for multichannel synthetic aperture radar. Electron. Commun. Eng. J. 1999, 11, 29–38. [Google Scholar] [CrossRef]
- Jao, J.K. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar] [CrossRef] [Green Version]
- Ouchi, K. On the multilook images of moving targets by synthetic aperture radars. IEEE Trans. Antennas Propag. 1985, 33, 823–827. [Google Scholar] [CrossRef]
- Ouchi, K.; Iehara, M.; Morimura, K.; Kumano, S.; Takami, I. Nonuniform azimuth image shift observed in the Radarsat images of ships in motion. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2188–2195. [Google Scholar] [CrossRef]
- Chaturvedi, S.K.; Yang, C.S.; Ouchi, K.; Shanmugam, P. Ship Recognition by Integration of SAR and AIS. J. Navig. 2012, 65, 323–337. [Google Scholar] [CrossRef]
- Mazzarella, F.; Vespe, M.; Santamaria, C. SAR Ship Detection and Self-Reporting Data Fusion Based on Traffic Knowledge. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1685–1689. [Google Scholar] [CrossRef]
- Liu, C.; Gierull, C.H. A New Application for PolSAR Imagery in the Field of Moving Target Indication/Ship Detection. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3426–3436. [Google Scholar] [CrossRef]
- Gierull, C.H.; Sikaneta, I.; Cerutti-Maori, D. Two-Step Detector for RADARSAT-2’s Experimental GMTI Mode. IEEE Trans. Geosci. Remote Sens. 2013, 51, 436–454. [Google Scholar] [CrossRef]
- Tunaley, J.K.E. The estimation of ship velocity from SAR imagery. In Proceedings of the IGARSS 2003, 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 1, pp. 191–193. [Google Scholar]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- Dragosevic, M.V.; Vachon, P.W. Estimation of Ship Radial Speed by Adaptive Processing of RADARSAT-1 Fine Mode Data. IEEE Geosci. Remote Sens. Lett. 2008, 5, 678–682. [Google Scholar] [CrossRef]
- Kirscht, M. Detection and imaging of arbitrarily moving targets with single-channel SAR. IEE Proc. Radar Sonar Navig. 2003, 150, 7–11. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Wake component detection in X-band SAR images for ship heading and velocity estimation. Remote Sens. 2016, 8, 498. [Google Scholar] [CrossRef]
- Renga, A.; Moccia, A. Use of Doppler Parameters for Ship Velocity Computation in SAR Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3995–4011. [Google Scholar] [CrossRef]
- Panico, A.; Graziano, M.D.; Renga, A. SAR-Based Vessel Velocity Estimation From Partially Imaged Kelvin Pattern. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2067–2071. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X. Velocity estimation of moving targets in SAR imaging. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1543–1549. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Velotto, D.; Jacobsen, S. Extension of Ship Wake Detectability Model for Non-Linear Influences of Parameters Using Satellite Based X-Band Synthetic Aperture Radar. Remote Sens. 2019, 11, 563. [Google Scholar] [CrossRef]
- Graziano, M.D.; Grasso, M.; D’Errico, M. Performance Analysis of Ship Wake Detection on Sentinel-1 SAR Images. Remote Sens. 2017, 9, 1107. [Google Scholar] [CrossRef]
- Copeland, A.C.; Ravichandran, G.; Trivedi, M.M. Localized Radon Transform-Based Detection of Ship Wakes in SAR Images. IEEE Trans. Geosci. Remote Sens. 1995, 33, 35–45. [Google Scholar] [CrossRef]
- Rey, M.T.; Tunaley, J.K.; Folinsbee, J.T.; Jahans, P.A.; Dixon, J.A.; Vant, M.R. Application of Radon Transform Techniques to Wake Detection in Seasat-A SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Lyden, J.D.; Hammond, R.R.; Lyzenga, D.R.; Shuchman, R.A. Synthetic aperture radar imaging of surface ship wakes. J. Geophys. Res. Ocean. 1988, 93, 12293–12303. [Google Scholar] [CrossRef]
- Yeremy, M.; Campbell, J.W.M.; Mattar, K.; Potter, T. Ocean Surveillance with Polarimetric SAR. Can. J. Remote Sens. 2001, 27, 328–344. [Google Scholar] [CrossRef]
- Rossi, C.; Runge, H.; Breit, H.; Fritz, T. Surface current retrieval from TerraSAR-X data using Doppler measurements. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3055–3058. [Google Scholar]
- Tunaley, J.K.E. Wakes from Go-Fast and Small Planing Boats; London Research and Development Corporation: Ottawa, ON, Canada, 2014. [Google Scholar]
- Airbus. TerraSAR-X Image Product Guide; 2015; Available online: https://www.intelligence-airbusds.com (accessed on 4 September 2019).
- ExactEarth. Available online: https://www.exactearth.com (accessed on 9 Jaunuary 2018).
- Tings, B.; Velotto, D. Comparison of ship wake detectability on C-band and X-band SAR. Int. J. Remote Sens. 2018, 39, 4451–4468. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image #1 | Image #2 | Image #3 | Image #4 | |
|---|---|---|---|---|
| Acquisition Date | 5 June 2014 | 29 June 2013 | 10 July 2013 | 3 August 2012 |
| Acquisition Hour (UTC) | 5:20:14 | 5:20:10 | 5:20:11 | 5:20:06 |
| Polarization | VH/VV | |||
| Pass | Descend. | |||
| Incidence Angle (°) | 22 | |||
| Ship ID | 1 to 8 | 9 to 12 | 13 to 16 | 17 to 20 |
| Range Spacing (m) | 1.2 | |||
| Azimuth Spacing (m) | 2.4 | |||
| Wind speed (m/s) * | 2.4 | 3.1 | 3 | 2.6 |
| Distances | <50 m | <100 m | <150 m | Mean Value (Standard Deviation) in Meters |
|---|---|---|---|---|
| d1 | 11% | 44% | 61% | 164 (157) |
| d2 | 44% | 78% | 100% | 67 (34) |
| d3 | 39% | 72% | 100% | 73 (37) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graziano, M.D.; Renga, A.; Moccia, A. Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness. Remote Sens. 2019, 11, 2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11192196
Graziano MD, Renga A, Moccia A. Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness. Remote Sensing. 2019; 11(19):2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11192196
Chicago/Turabian StyleGraziano, Maria Daniela, Alfredo Renga, and Antonio Moccia. 2019. "Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness" Remote Sensing 11, no. 19: 2196. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11192196