A New Framework for Modelling and Monitoring the Conversion of Cultivated Land to Built-up Land Based on a Hierarchical Hidden Semi-Markov Model Using Satellite Image Time Series

Abstract
:
1. Introduction
2. Study Area and Datasets
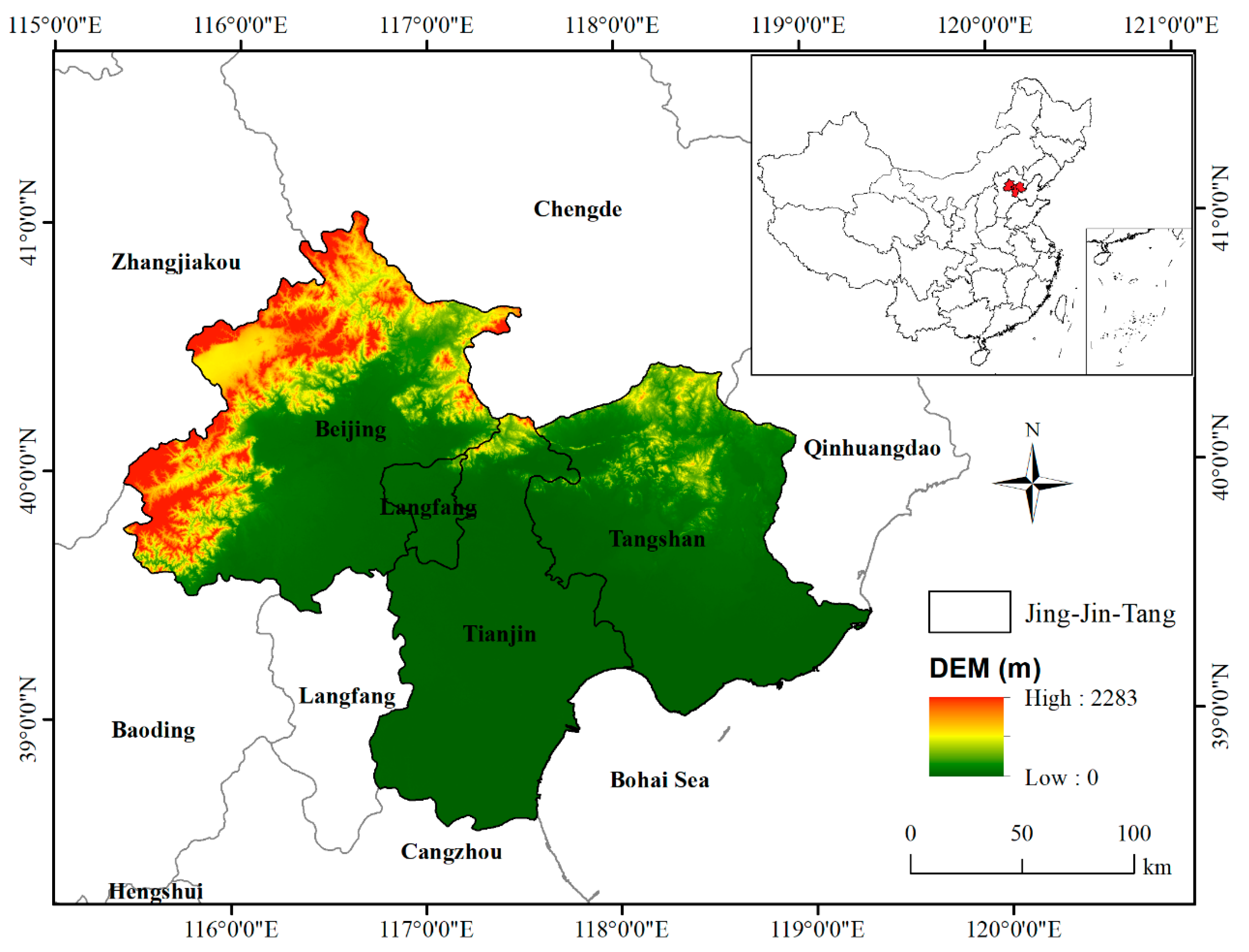
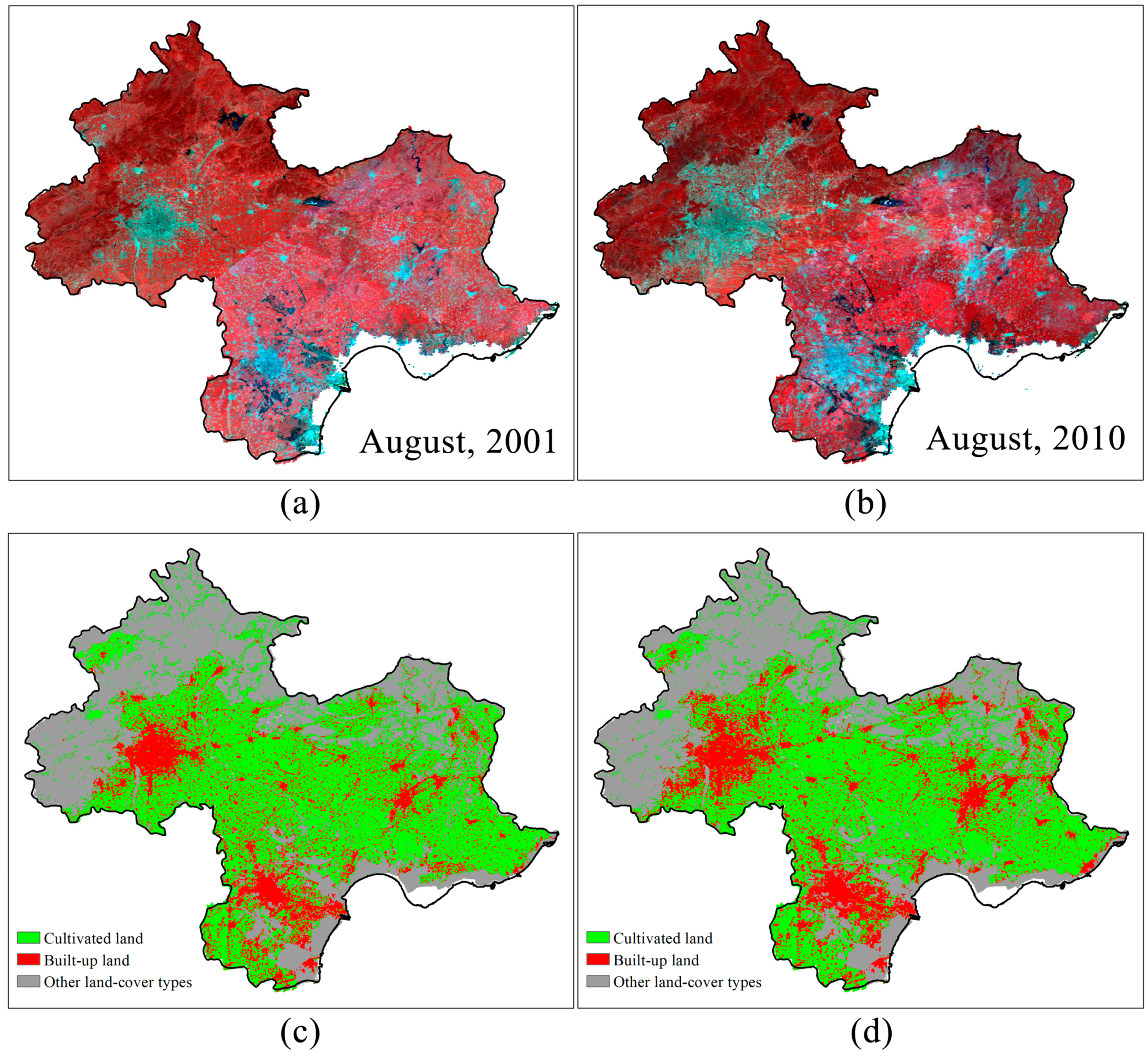
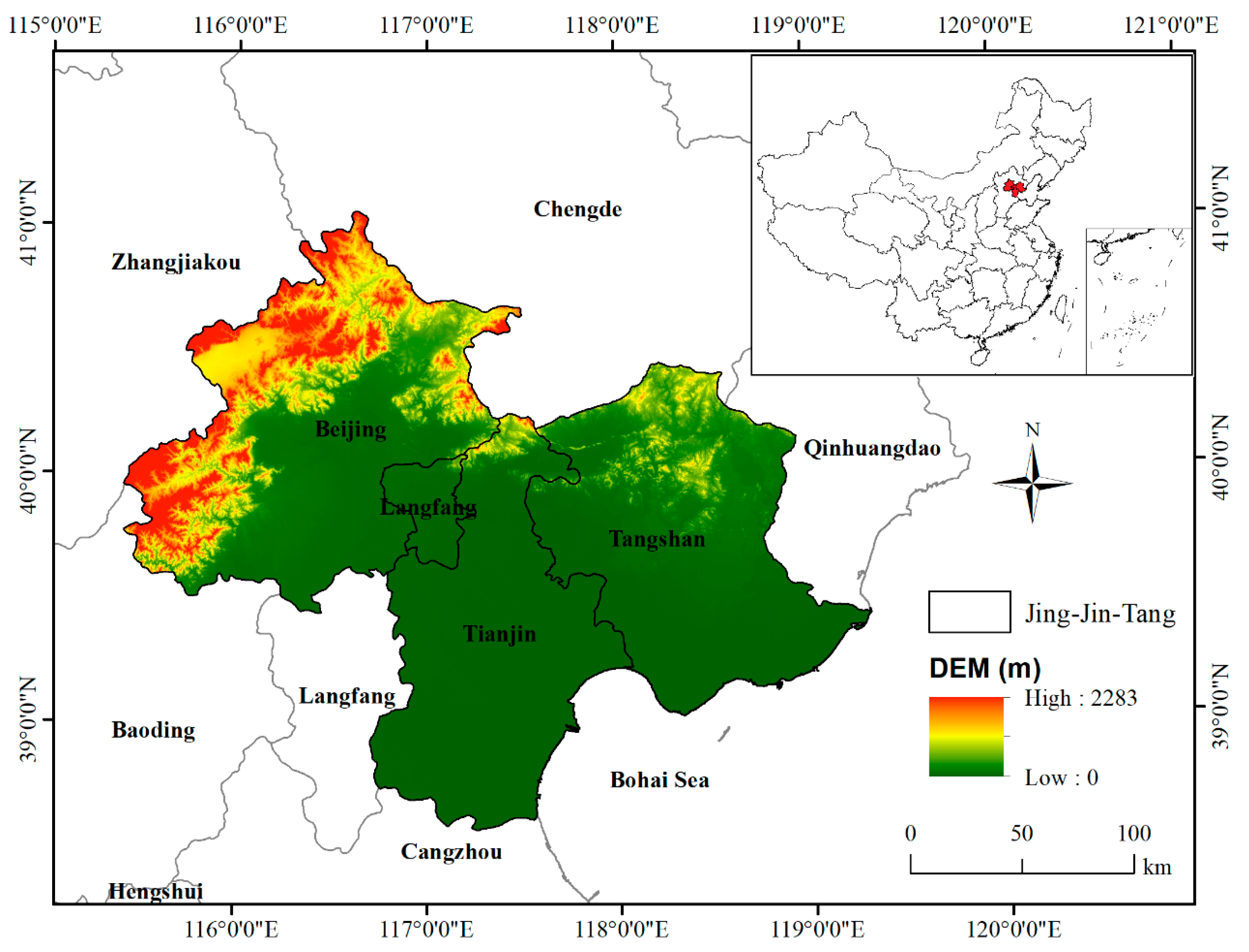
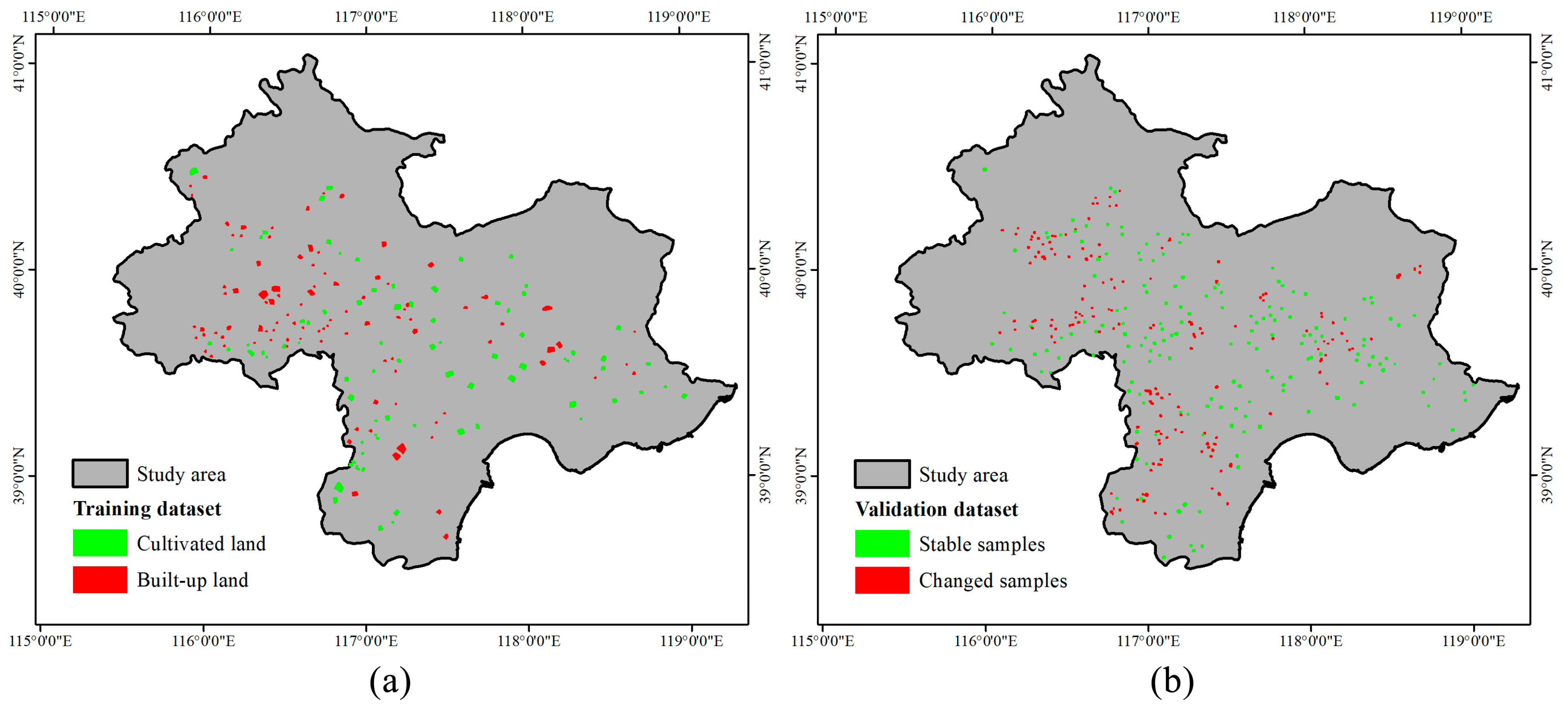
2.1. Study Area
2.2. Datasets and Pre-Processing
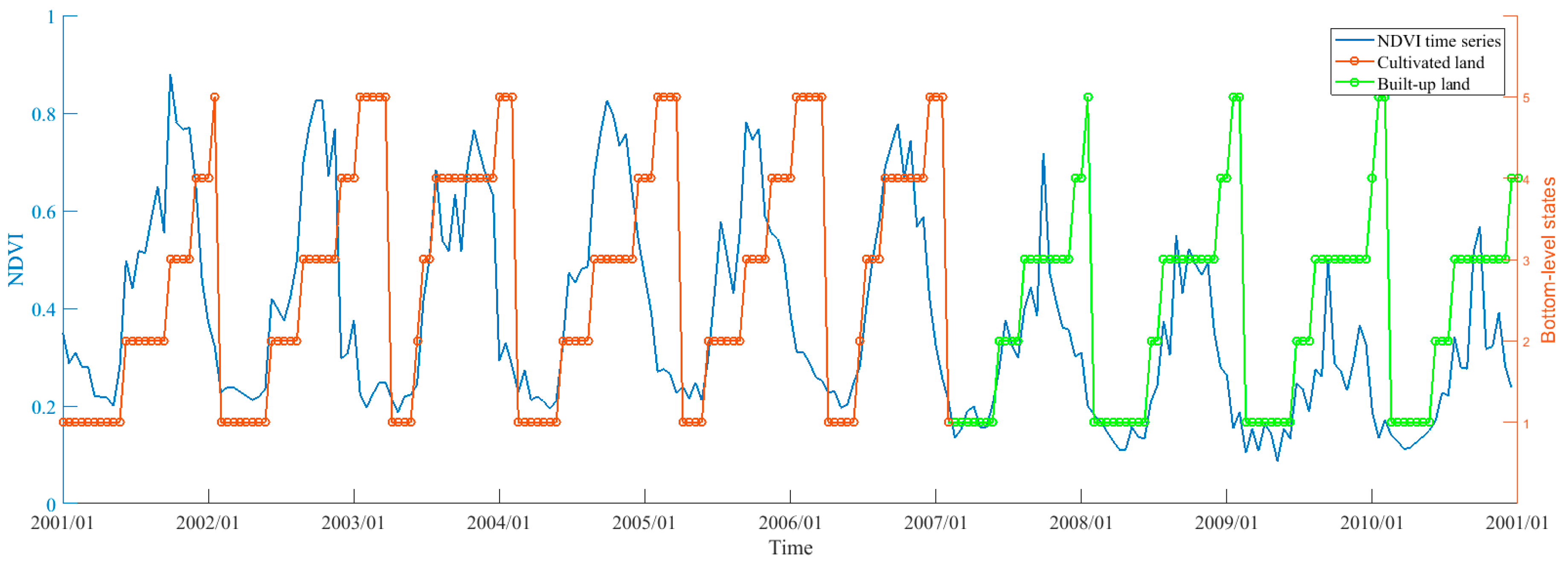
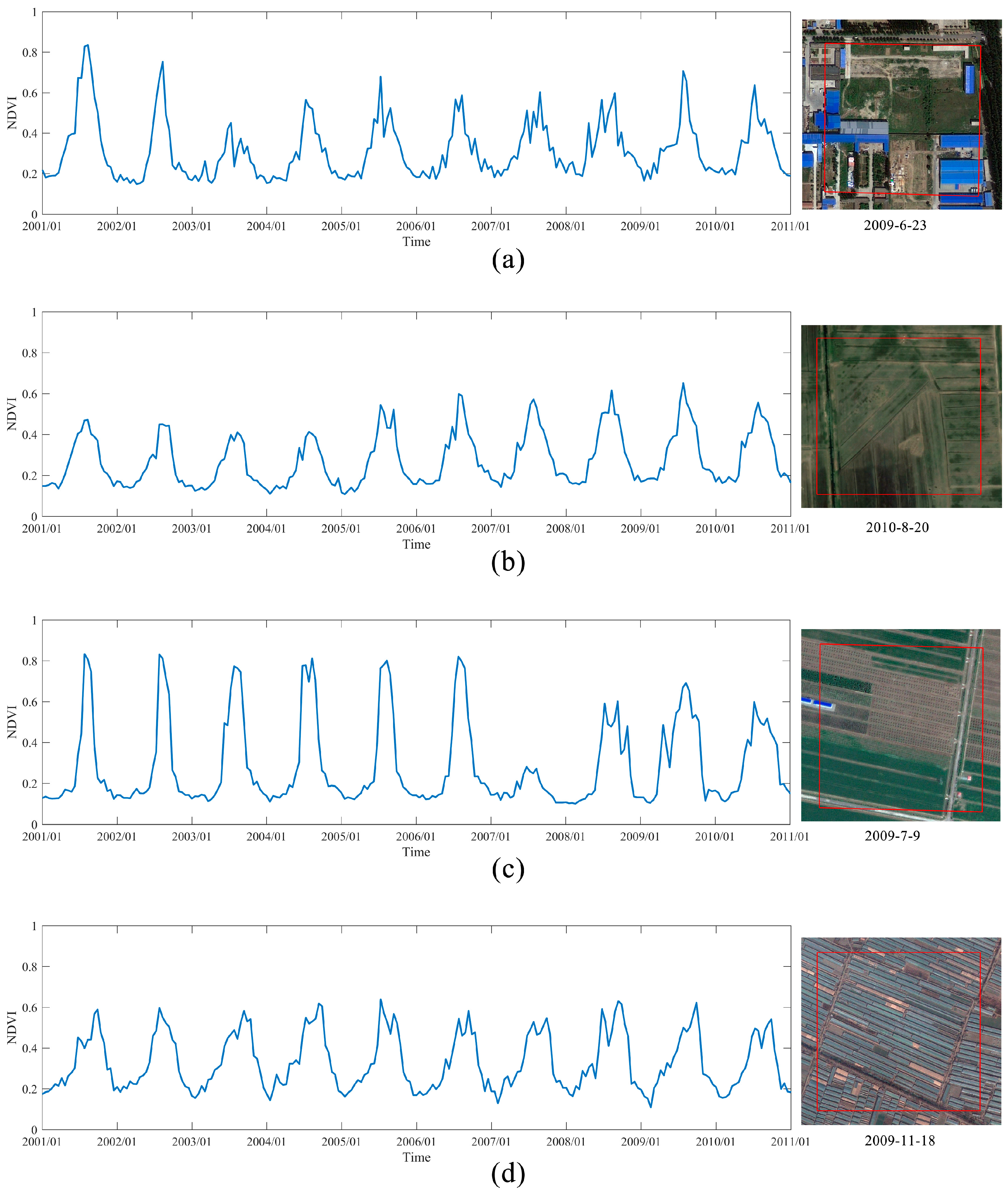
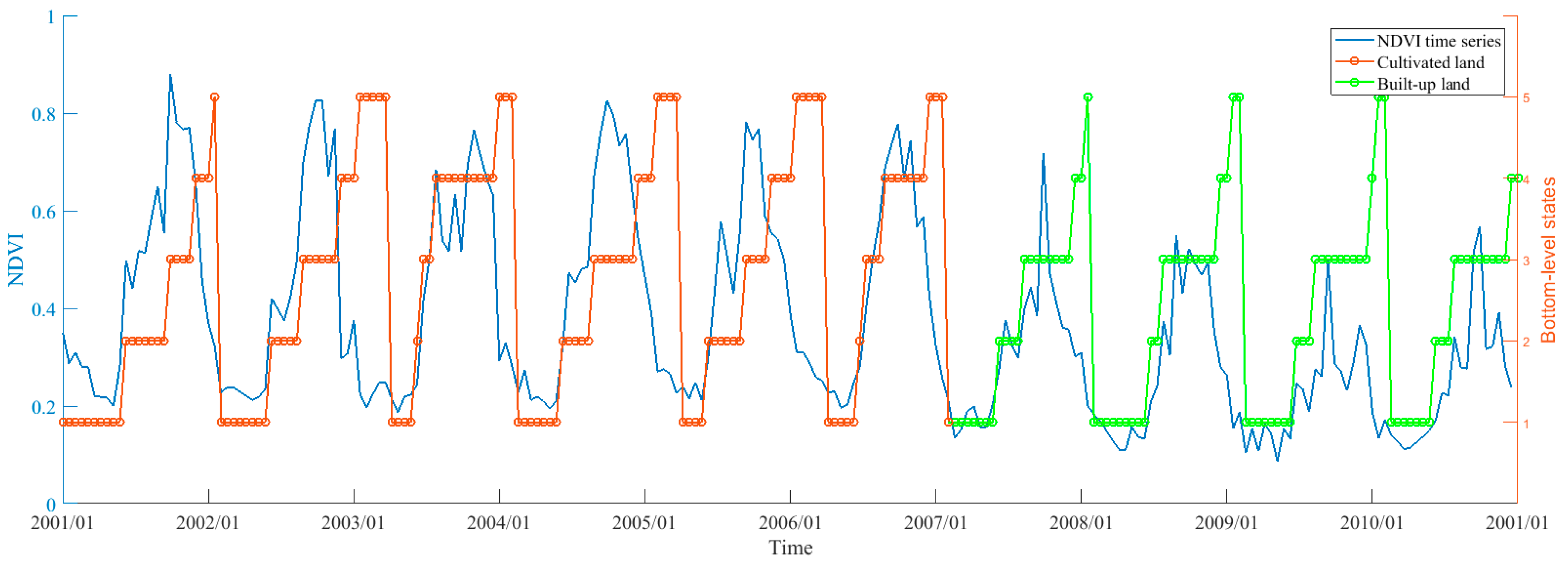
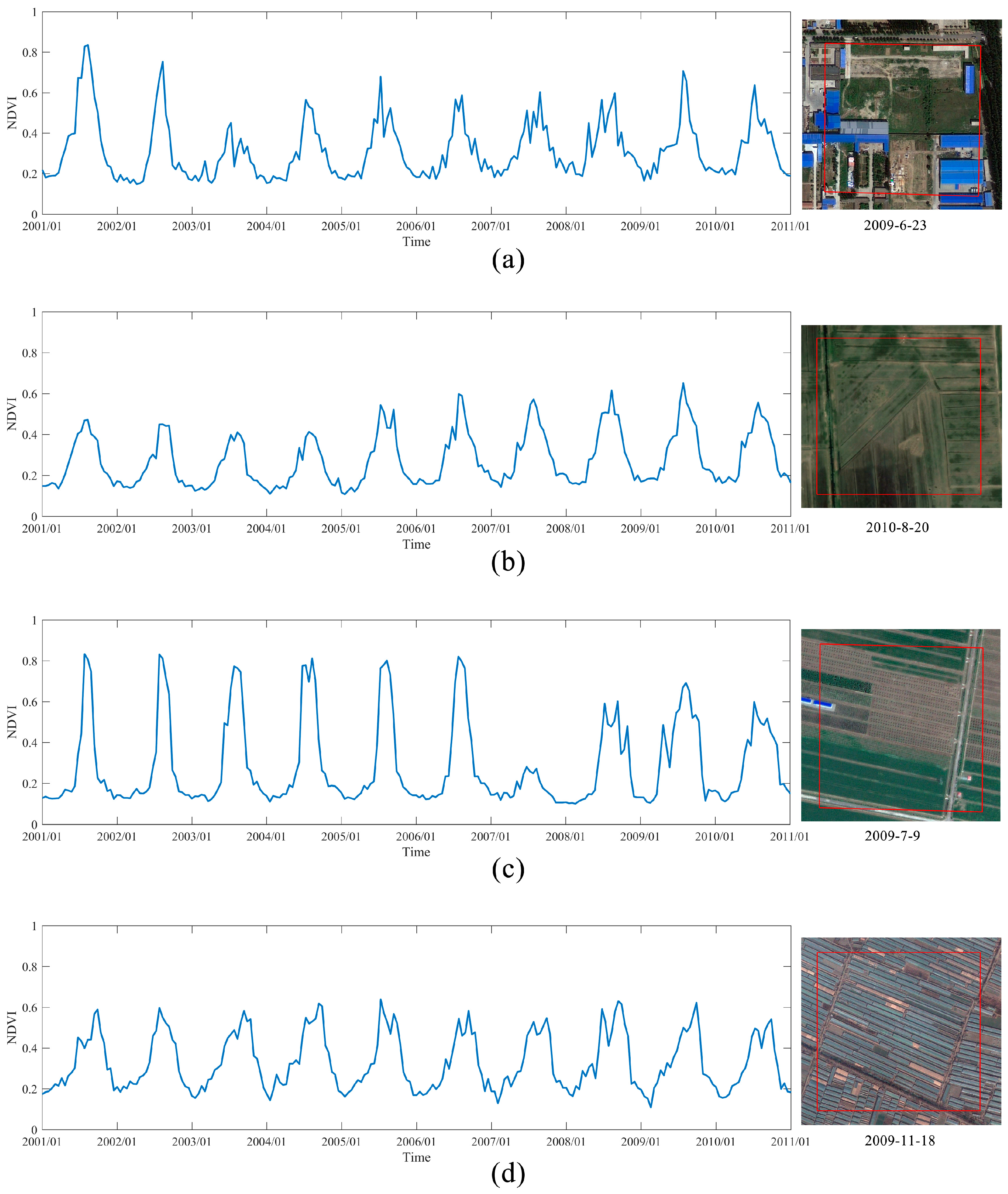
2.2.1. MODIS NDVI Time Series
2.2.2. Auxiliary Data
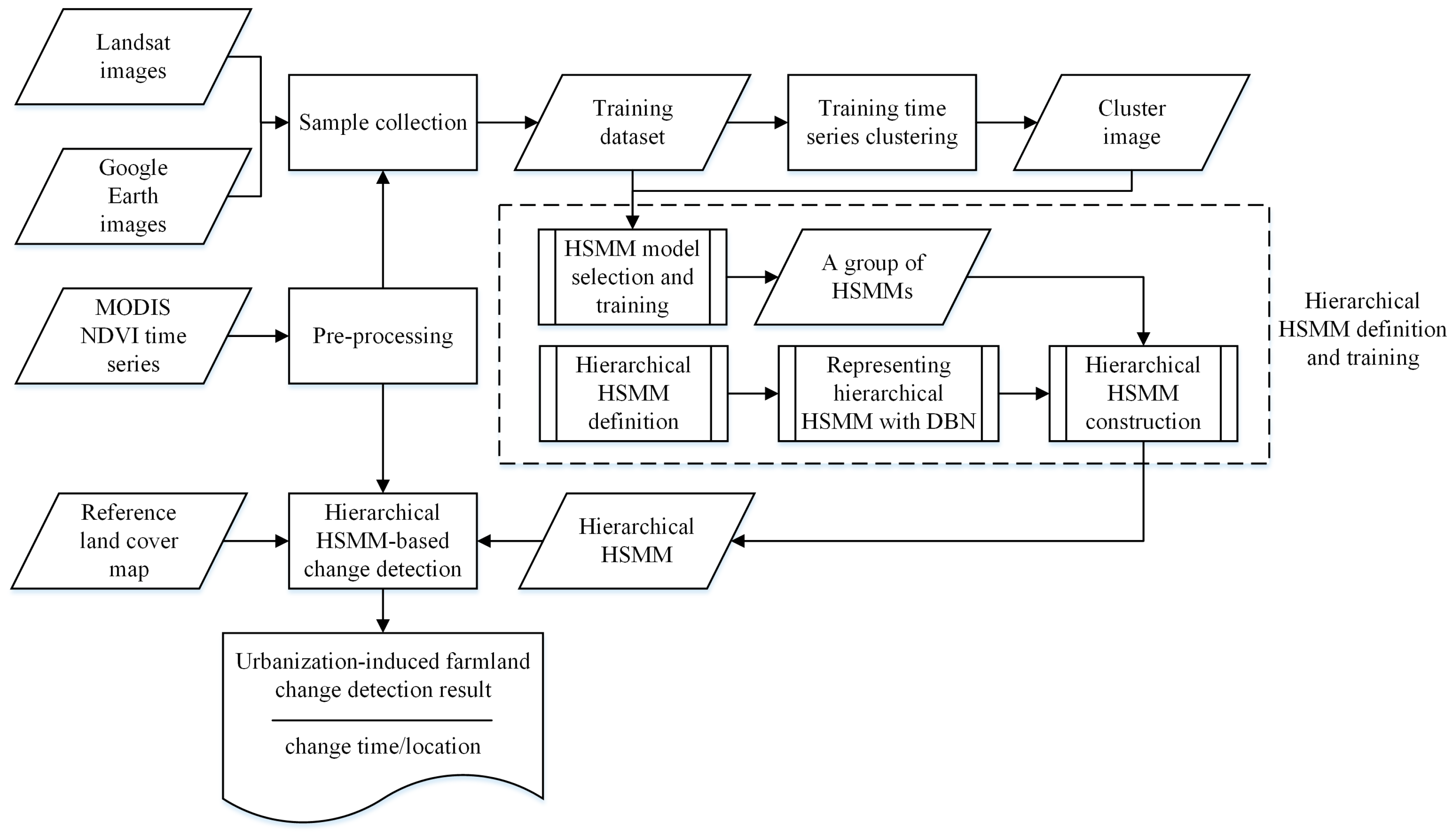
3. Methodology
3.1. Sample Collection
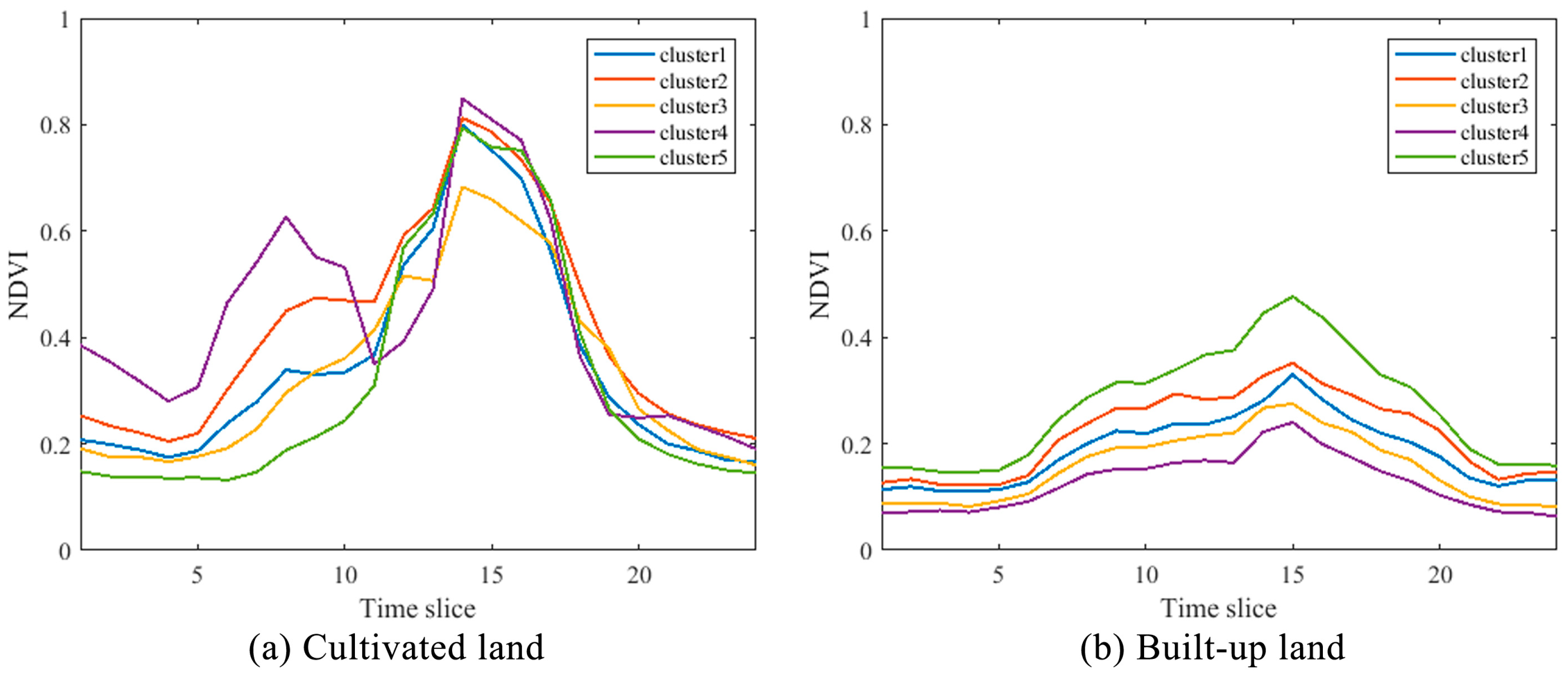
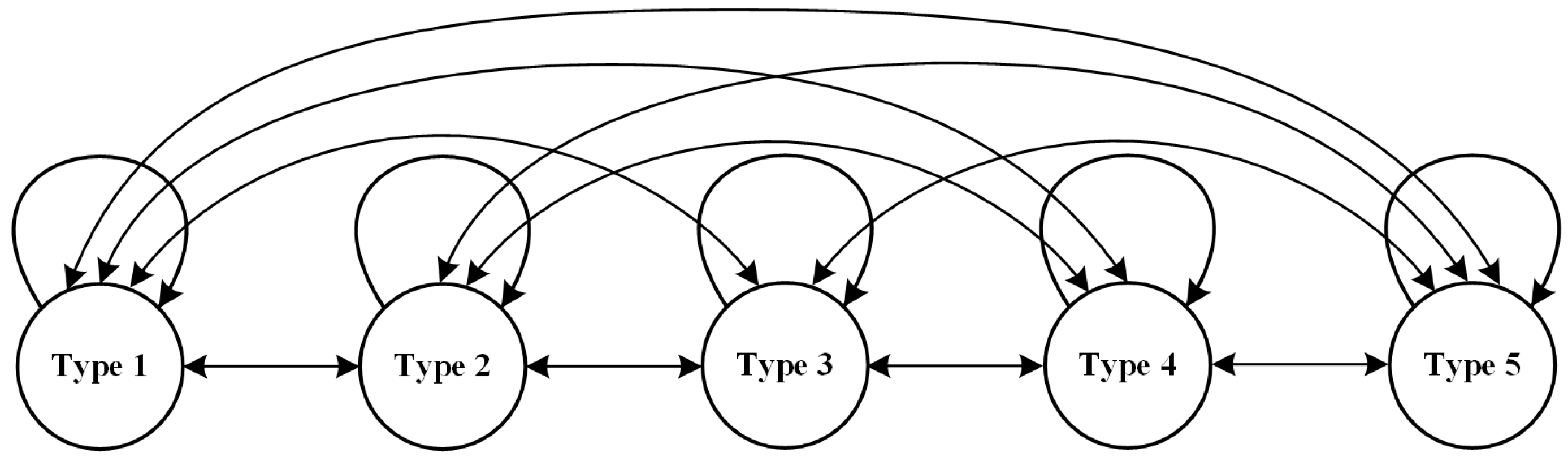
3.2. Training Time Series Clustering
3.3. Hierarchical Hidden Markov Model Definition and Training
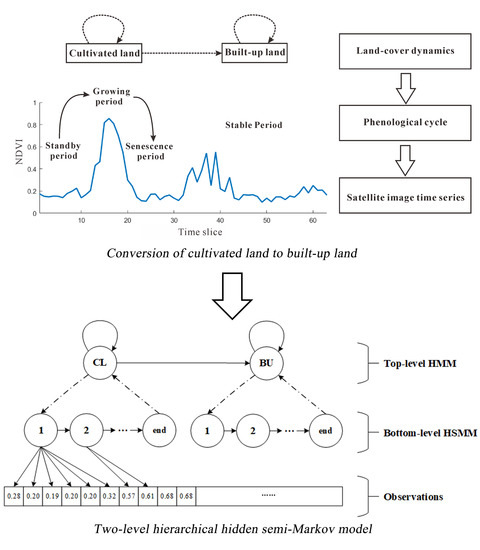
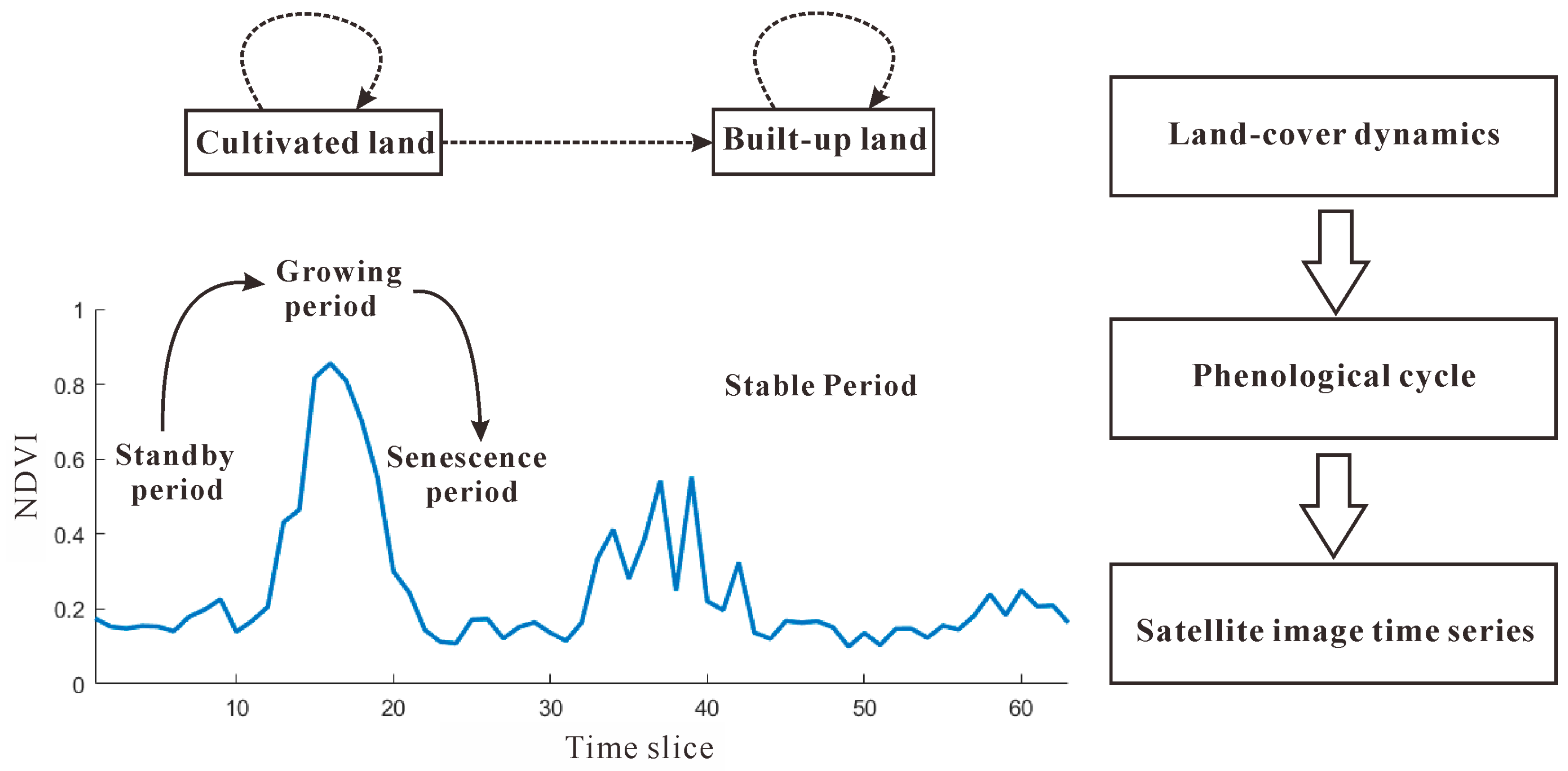
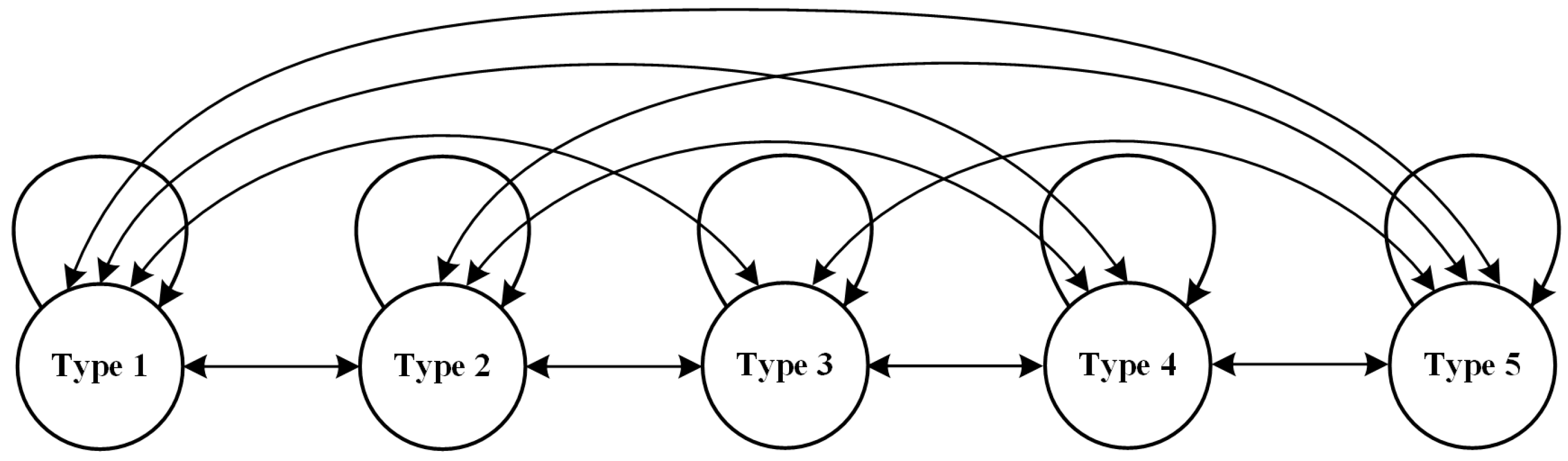
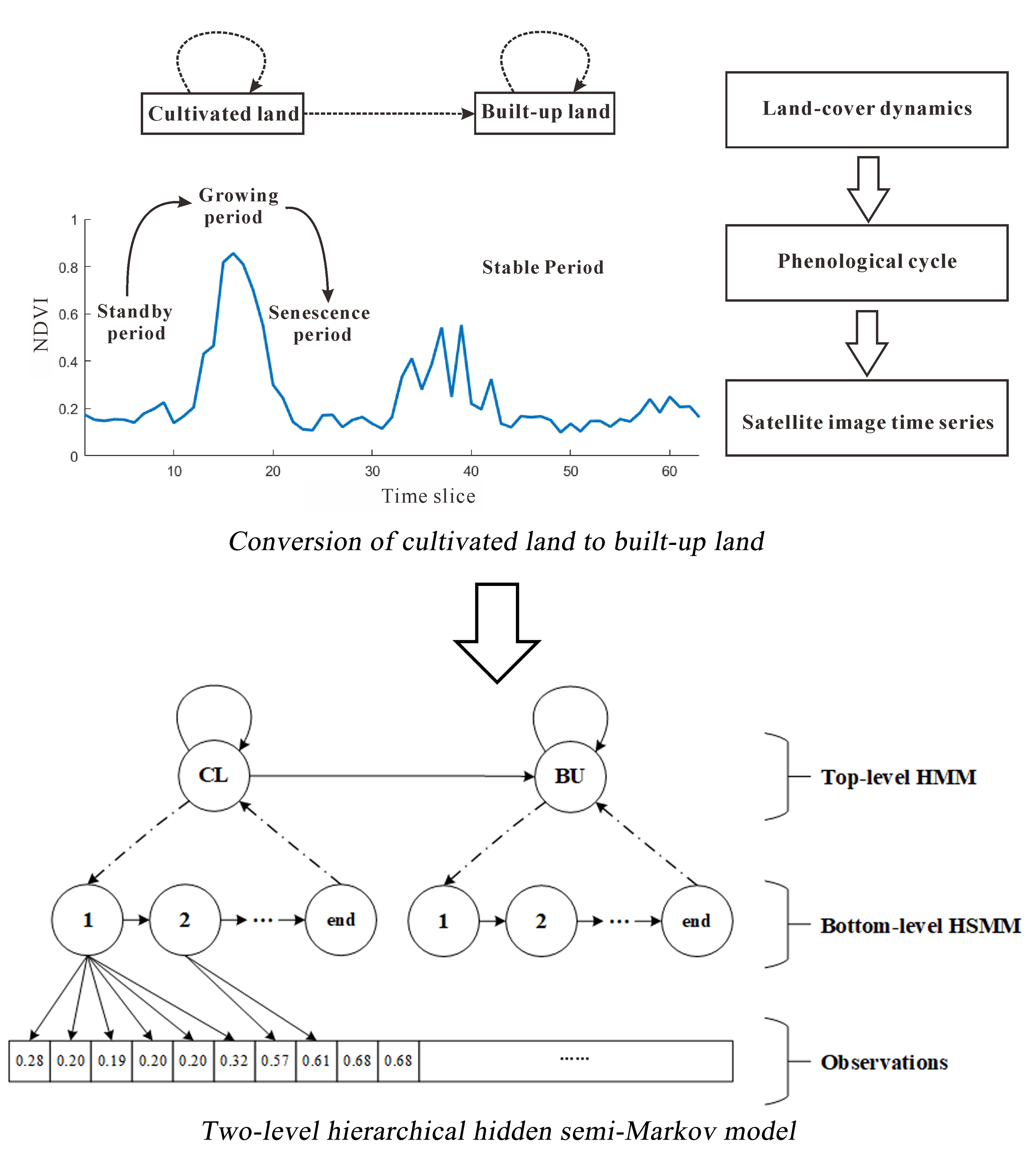
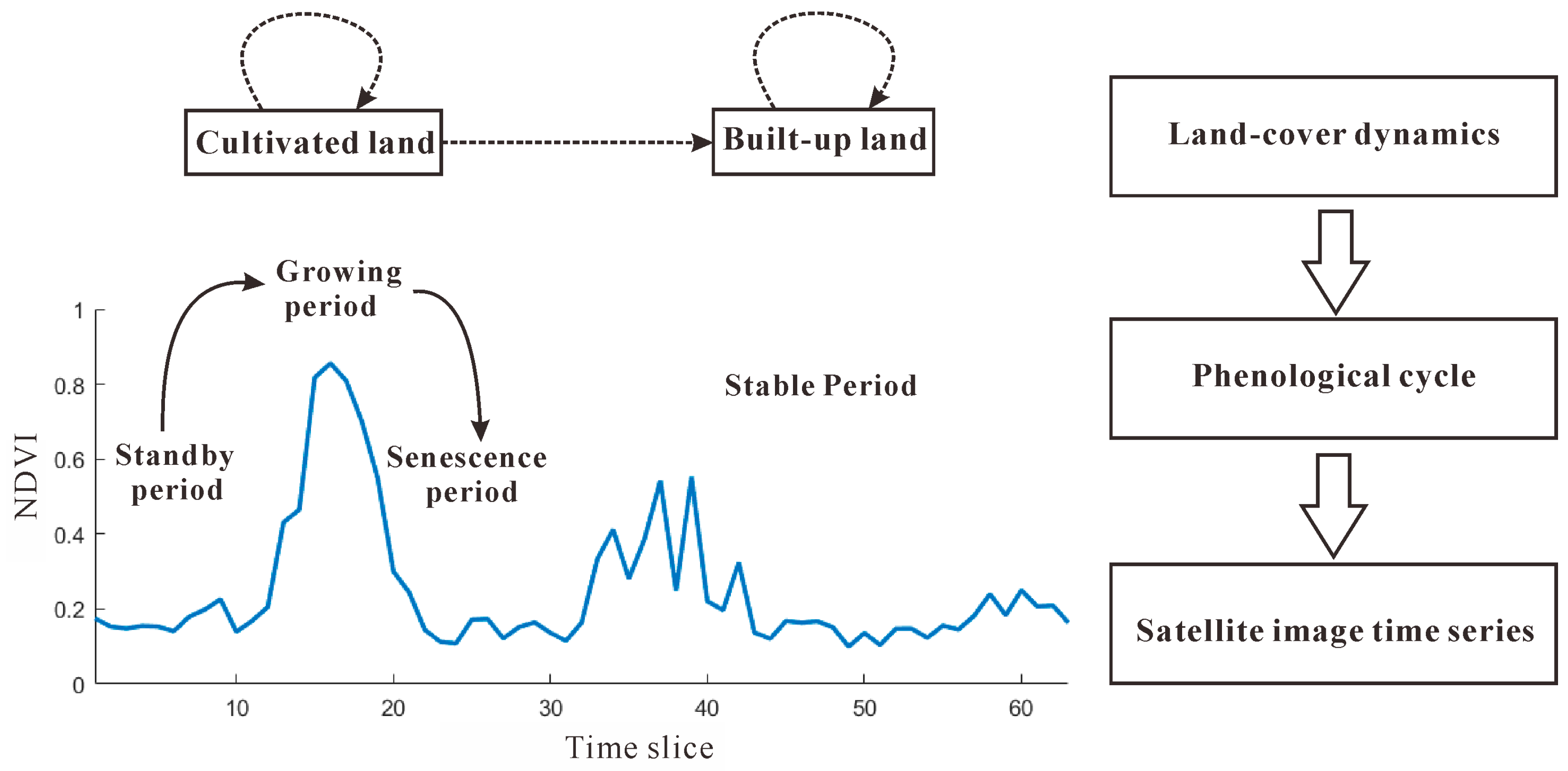
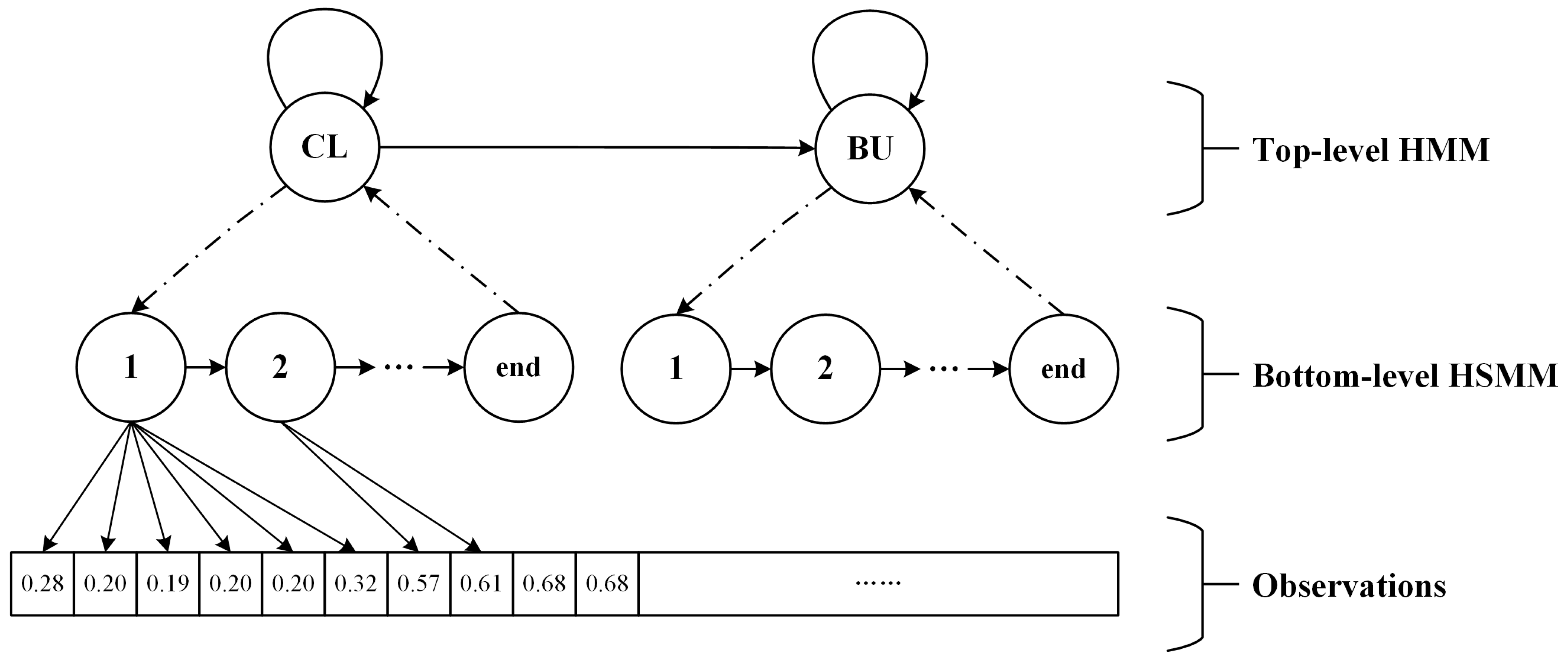
3.3.1. Hierarchical HSMM Definition
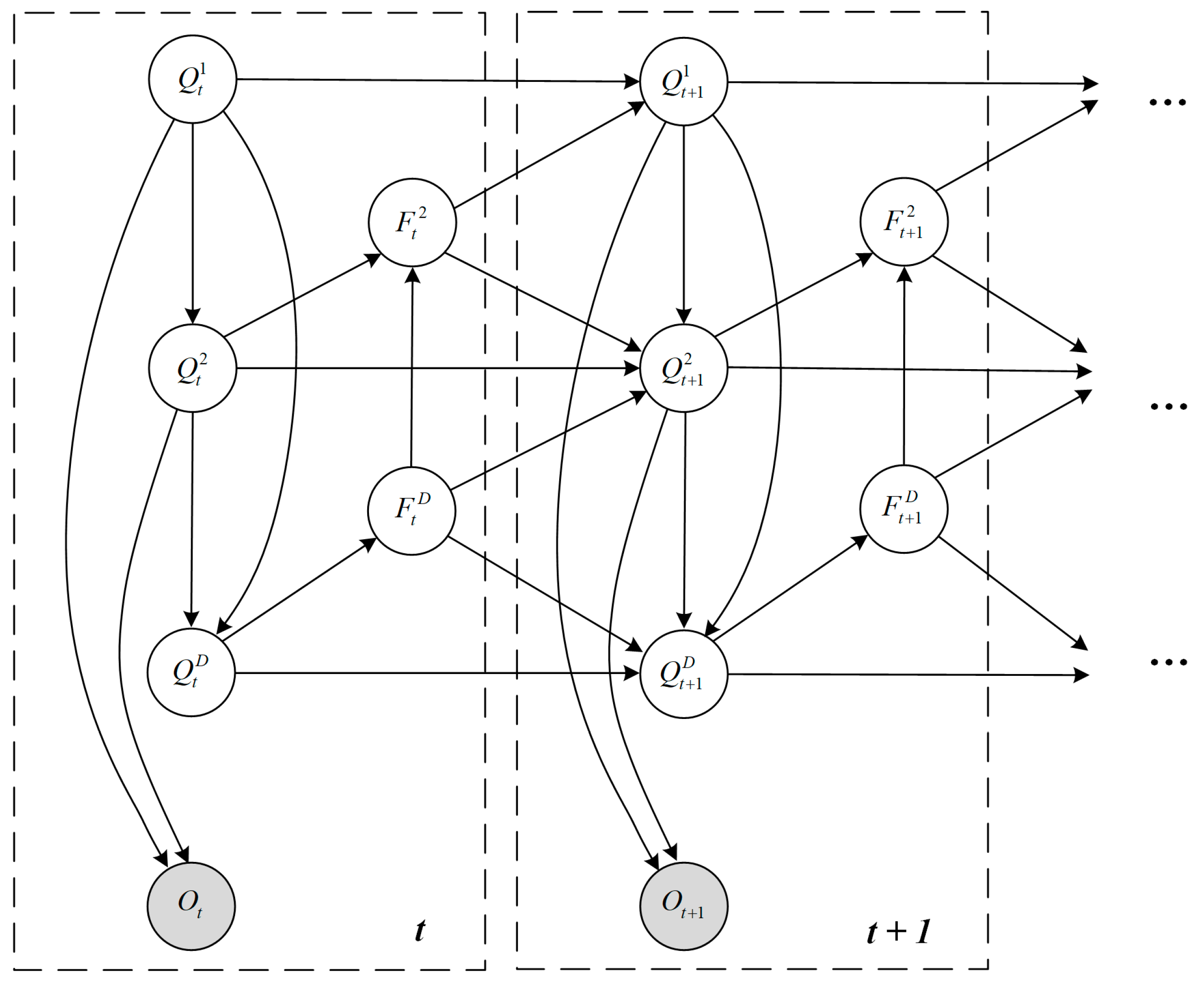
3.3.2. Dynamic Bayesian Network Representation of the Proposed Hierarchical HSMM
3.3.3. Hierarchical HSMM Construction
3.4. Hierarchical HSMM-based Change Detection
4. Results
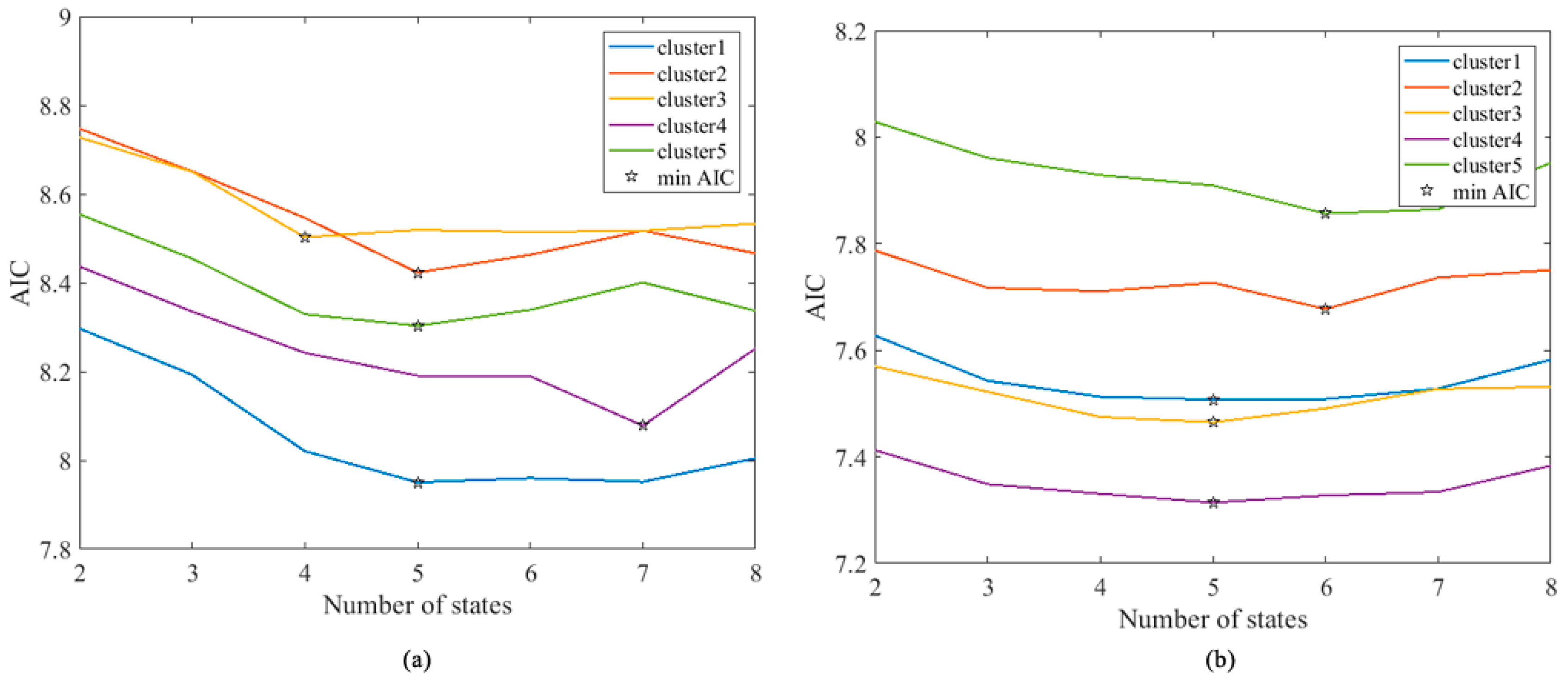
4.1. Model Selection for HSMM
4.2. Change Detection Accuracy and Method Comparisons
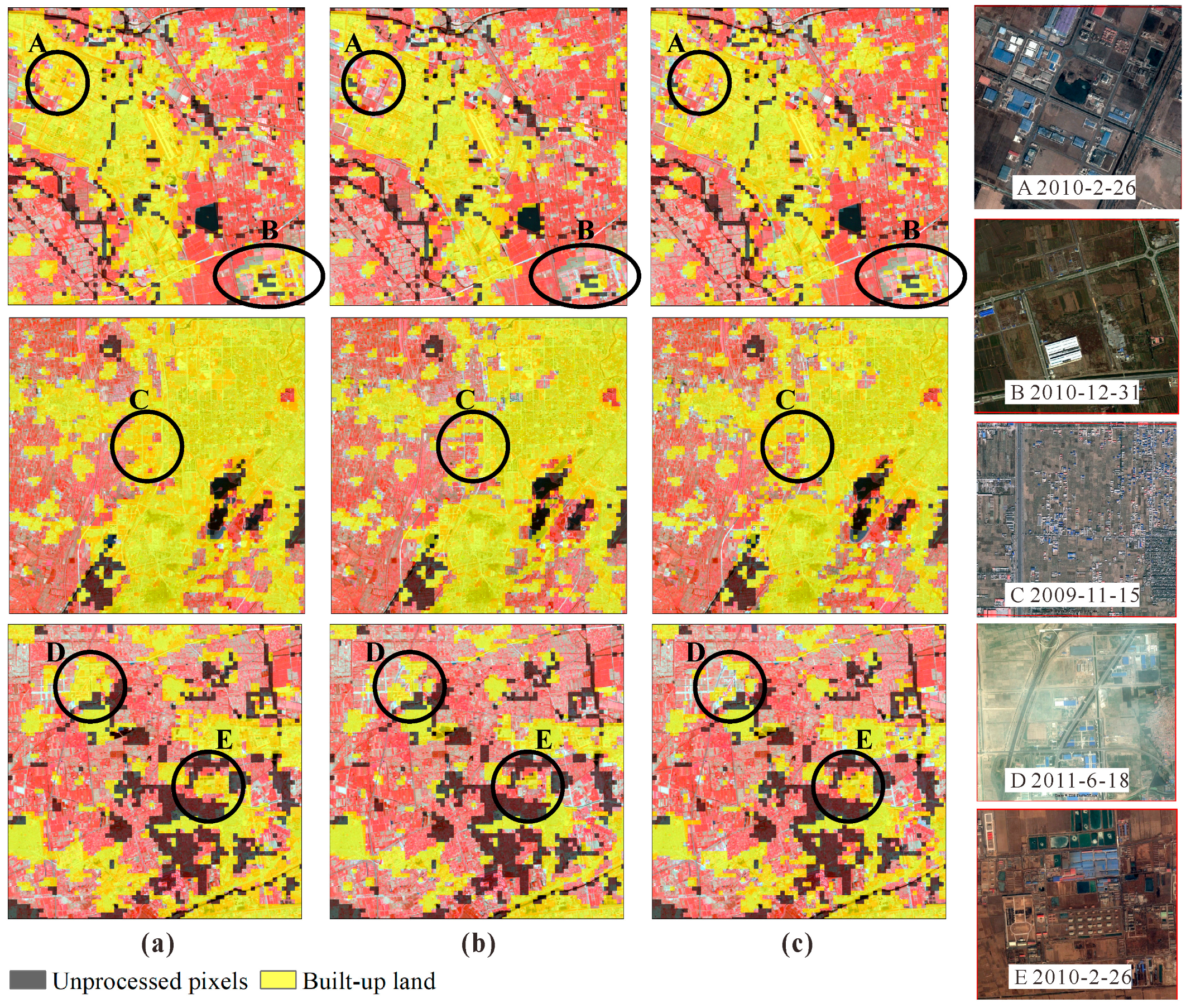
4.2.1 Accuracy Assessment for Change Location
4.2.2. Accuracy Assessment for Change Year
5. Discussion
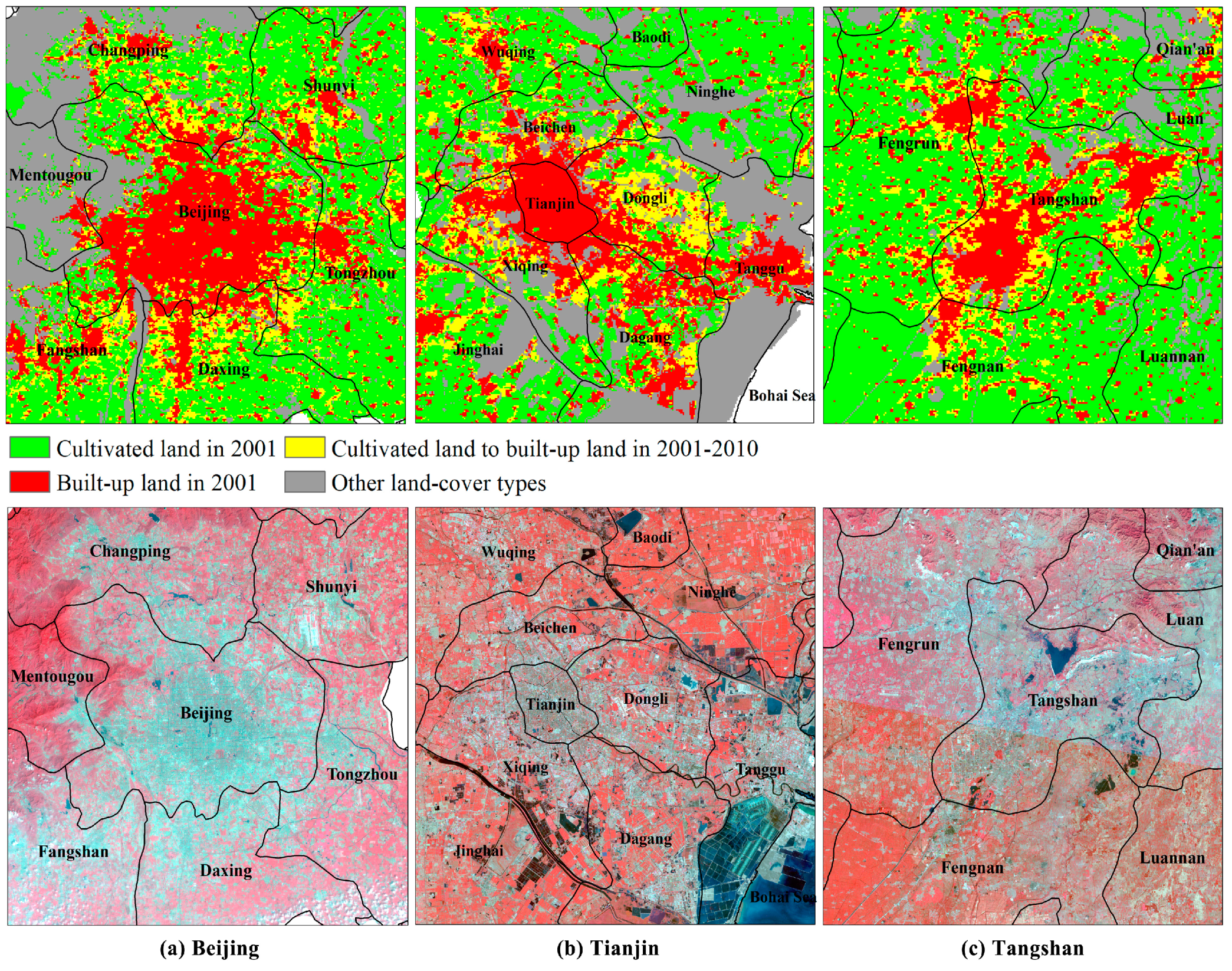
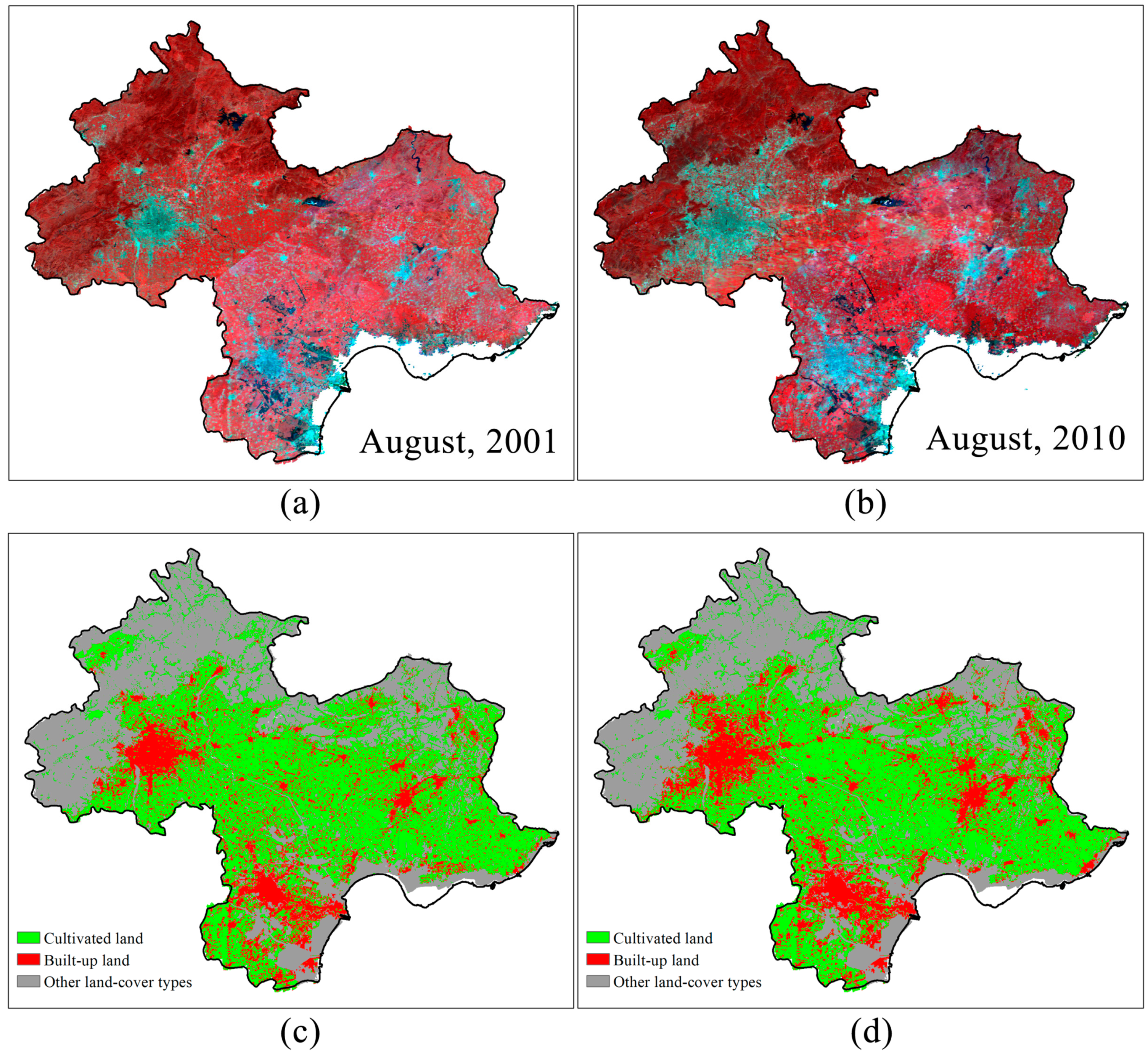
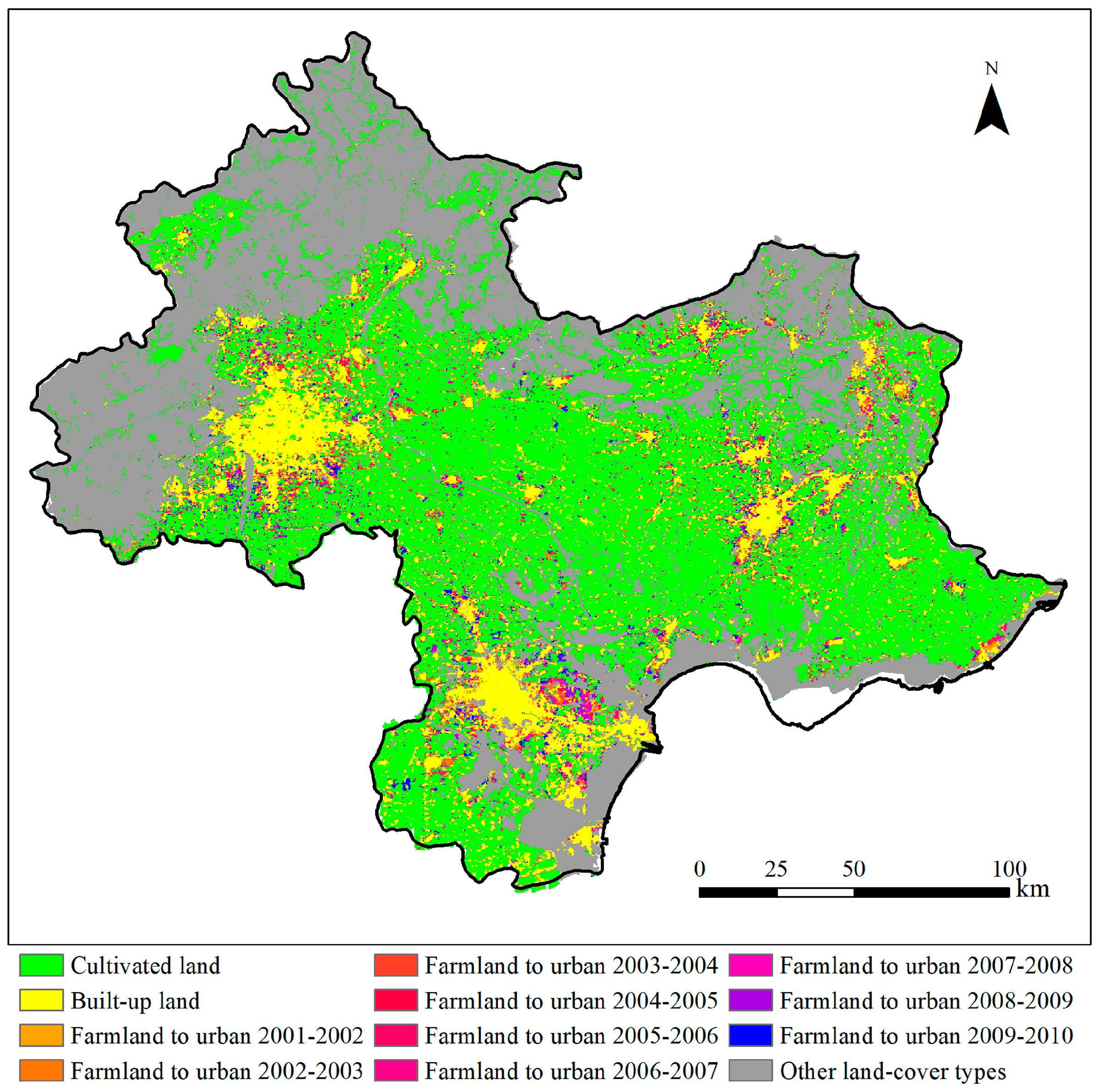
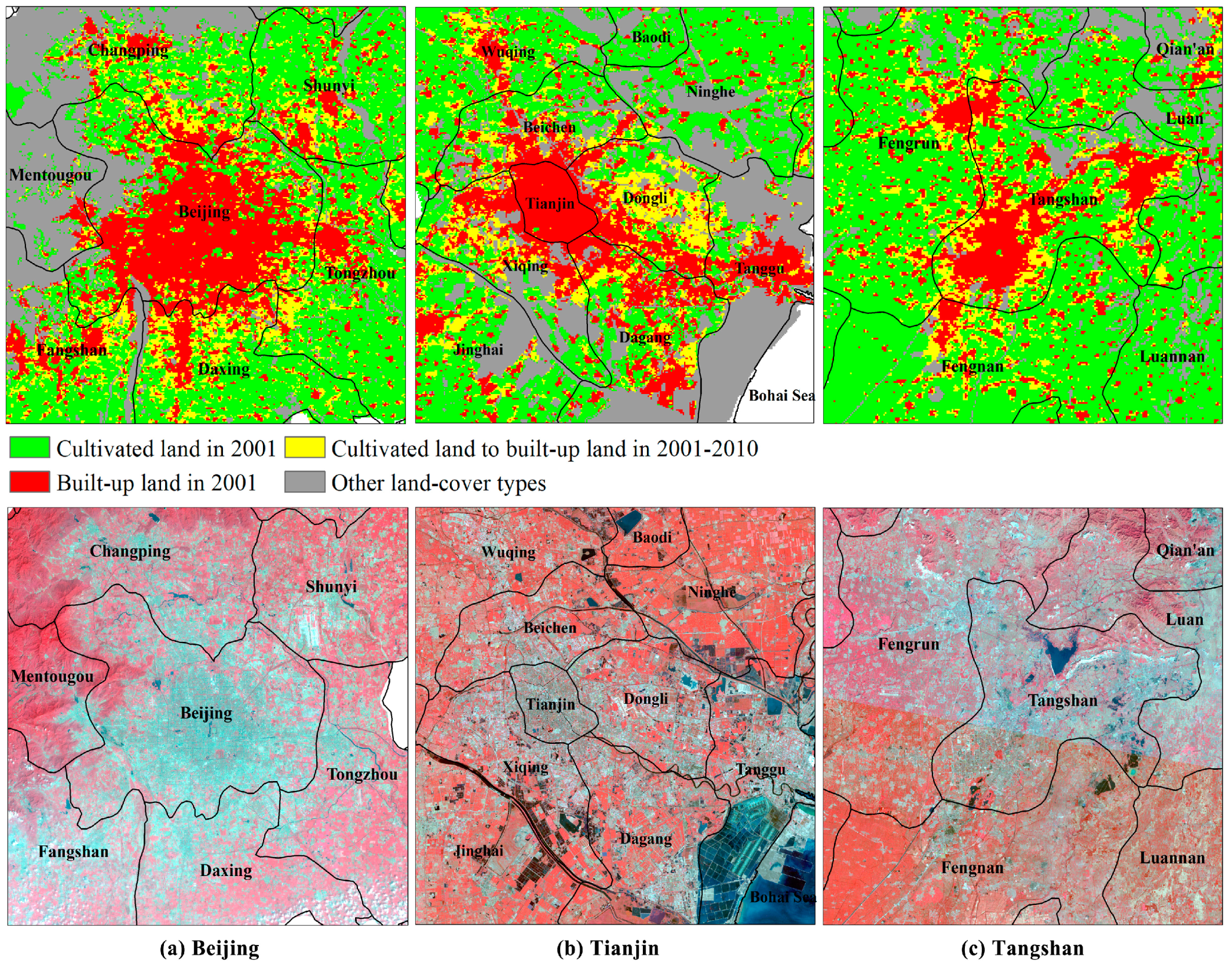
5.1. Urban Expansion Patterns in the Jing-Jin-Tang District
5.2. Strengths and Limitations of the Proposed Algorithm
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lopez, T.D.; Aide, T.M.; Thomlinson, J.R. Urban Expansion and the Loss of Prime Agricultural Lands in Puerto Rico. Ambio 2001, 30, 49–54. [Google Scholar] [CrossRef] [PubMed]
- Thapa, R.B.; Murayama, Y. Examining spatiotemporal urbanization patterns in Kathmandu Valley, Nepal: Remote sensing and spatial metrics approaches. Remote Sens. 2009, 1, 534–556. [Google Scholar] [CrossRef]
- Pandey, B.; Seto, K.C. Urbanization and agricultural land loss in India: Comparing satellite estimates with census data. J. Environ. Manag. 2015, 148, 53–66. [Google Scholar] [CrossRef] [PubMed]
- Pribadi, D.O.; Pauleit, S. The dynamics of peri-urban agriculture during rapid urbanization of Jabodetabek Metropolitan Area. Land Use Policy 2017, 48, 13–24. [Google Scholar] [CrossRef]
- Bai, X.; Shi, P.; Liu, Y. Society: Realizing China’s urban dream. Nature 2014, 509, 158–160. [Google Scholar] [CrossRef] [PubMed]
- Shi, K.; Chen, Y.; Yu, B.; Xu, T.; Li, L.Y.; Huang, C.; Liu, R.; Chen, Z.; Wu, J. Urban expansion and agricultural land loss in China: A multiscale perspective. Sustainability 2016, 8, 790. [Google Scholar] [CrossRef]
- China Statistical Yearbook 2017. National Bureau of Statistics of the People’s Republic of China, 2017. Available online: http://www.stats.gov.cn/tjsj/ndsj/2017/indexch.htm (accessed on 30 September 2018).
- Zhang, Z.; Wen, Q.; Liu, F.; Zhao, X.; Liu, B.; Xu, J.; Yi, L.; Hu, S.; Wang, X.; Zuo, L.; et al. Urban expansion in China and its effect on cultivated land before and after initiating “Reform and Open Policy”. Sci. China Earth Sci. 2016, 59, 1930–1945. [Google Scholar] [CrossRef]
- Tan, M.; Li, X.; Lu, C. Urban land expansion and arable land loss of the major cities in China in the 1990s. Sci China Ser D 2005, 48, 1492–1500. [Google Scholar] [CrossRef]
- Chen, L.; Jiang, P.; Chen, W.; Li, M.; Wang, L.; Pian, Y.; Xia, N.; Duan, Y.; Huang, Q. Farmland protection policies and rapid urbanization in China: A case study for Changzhou City. Land Use Policy 2015, 48, 552–566. [Google Scholar] [CrossRef]
- Tan, M.; Li, X.; Xie, H.; Lu, C. Urban land expansion and arable land loss in China—a case study of Beijing–Tianjin–Hebei region. Land Use Policy 2005, 22, 187–196. [Google Scholar] [CrossRef]
- Song, W.; Liu, M. Assessment of decoupling between rural settlement area and rural population in China. Land Use Policy 2014, 39, 331–341. [Google Scholar] [CrossRef]
- Dewan, A.M.; Yamaguchi, Y. Land use and land cover change in Greater Dhaka, Bangladesh: Using remote sensing to promote sustainable urbanization. Appl. Geogr. 2009, 29, 390–401. [Google Scholar] [CrossRef]
- Tan, K.; Lim, H.S.; MatJafri, M.Z.; Abdullah, K. Landsat data to evaluate urban expansion and determine land use/land cover changes in Penang Island, Malaysia. Environ. Earth Sci. 2010, 60, 1509–1521. [Google Scholar] [CrossRef]
- Long, H.; Liu, Y.; Hou, X.; Li, T.; Li, Y. Effects of land use transitions due to rapid urbanization on ecosystem services: Implications for urban planning in the new developing area of China. Habitat Int. 2014, 44, 536–544. [Google Scholar] [CrossRef]
- Hegazy, I.R.; Kaloop, M.R. Monitoring urban growth and land use change detection with GIS and remote sensing techniques in Daqahlia governorate Egypt. Int. J. Sustain. Built Environ. 2015, 4, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Schneider, A. Monitoring land cover change in urban and peri-urban areas using dense time stacks of Landsat satellite data and a data mining approach. Remote Sens. Environ. 2012, 124, 689–704. [Google Scholar] [CrossRef]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Digital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liu, H.; Peng, S. Detection of Cropland Change Using Multi-Harmonic Based Phenological Trajectory Similarity. Remote Sens. 2018, 10, 1020. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef] [Green Version]
- Jia, K.; Liang, S.; Wei, X.; Yao, Y.; Su, Y.; Jiang, B.; Wang, X. Land Cover Classification of Landsat Data with Phenological Features Extracted from Time Series MODIS NDVI Data. Remote Sens. 2014, 6, 11518–11532. [Google Scholar] [CrossRef] [Green Version]
- Song, X.P.; Sexton, J.O.; Huang, C.Q.; Channan, S.; Townshend, J.R. Characterizing the magnitude, timing and duration of urban growth from time series of Landsat-based estimates of impervious cover. Remote Sens. Environ. 2016, 175, 1–13. [Google Scholar] [CrossRef]
- Zhang, L.; Weng, Q. Annual dynamics of impervious surface in the Pearl River Delta, China, from 1988 to 2013, using time series Landsat imagery. ISPRS J. Photogramm. Remote Sens. 2016, 113, 86–96. [Google Scholar] [CrossRef]
- Singh, A. Digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Clark, M.L.; Aide, T.M.; Grau, H.R.; Riner, G. A scalable approach to mapping annual land cover at 250 m using MODIS time series data: A case study in the Dry Chaco ecoregion of South America. Remote Sens. Environ. 2010, 114, 2816–2832. [Google Scholar] [CrossRef]
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90. [Google Scholar] [CrossRef]
- Mertes, C.M.; Schneider, A.; Sulla-Menashe, D.; Tatem, A.J.; Tan, B. Detecting change in urban areas at continental scales with MODIS data. Remote Sens. Environ. 2015, 158, 331–347. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Fu, P.; Weng, Q.H. A time series analysis of urbanization induced land use and land cover change and its impact on land surface temperature with Landsat imagery. Remote Sens. Environ. 2016, 175, 205–214. [Google Scholar] [CrossRef]
- Viovy, N.; Saint, G. Hidden Markov models applied to vegetation dynamics analysis using satellite remote-sensing. IEEE Trans. Geosci. Remote Sens. 1994, 32, 906–917. [Google Scholar] [CrossRef]
- Leite, P.B.C.; Feitosa, R.Q.; Formaggio, A.R.; da Costa, G.A.O.P.; Pakzad, K.; Sanches, I.D. Hidden Markov Models for crop recognition in remote sensing image sequences. Pattern Recognit. Lett. 2011, 32, 19–26. [Google Scholar] [CrossRef]
- Shen, Y.; Wu, L.; Di, L.; Yu, G.; Tang, H.; Yu, G.; Shao, Y. Hidden Markov Models for Real-Time Estimation of Corn Progress Stages Using MODIS and Meteorological Data. Remote Sens. 2013, 5, 1734–1753. [Google Scholar] [CrossRef] [Green Version]
- Siachalou, S.; Mallinis, G.; Tsakiri-Strati, M. A Hidden Markov Models Approach for Crop Classification: Linking Crop Phenology to Time Series of Multi-Sensor Remote Sensing Data. Remote Sens. 2015, 7, 3633–3650. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Y.; Meng, Y.; Lin, L.; Sahli, H.; Yue, A.; Chen, J.; Zhao, Z.; Kong, Y.; He, D. Continuous Change Detection and Classification Using Hidden Markov Model: A Case Study for Monitoring Urban Encroachment onto Farmland in Beijing. Remote Sens. 2015, 7, 15318–15339. [Google Scholar] [CrossRef] [Green Version]
- Lambin, E.F. Modelling and monitoring land-cover change processes in tropical regions. Prog. Phys. Geog. 1997, 21, 375–393. [Google Scholar] [CrossRef]
- Sang, L.; Zhang, C.; Yang, J.; Zhu, D.; Yun, W. Simulation of land use spatial pattern of towns and villages based on CA-Markov model. Math. Comput. Model 2011, 54, 938–943. [Google Scholar] [CrossRef]
- Moghadam, H.S.; Helbich, M. Spatiotemporal urbanization processes in the megacity of Mumbai, India: A Markov chains-cellular automata urban growth model. Appl. Geogr. 2014, 40, 140–149. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Helbich, M.; Kainz, W.; Boloorani, A.D. Integration of logistic regression, Markov chain and cellular automata models to simulate urban expansion. Int. J. Appl. Earth Obs. 2013, 21, 265–275. [Google Scholar] [CrossRef]
- Rimal, B.; Zhang, L.F.; Keshtkar, H.; Haack, B.N.; Rijal, S.; Zhang, P. Land Use/Land Cover Dynamics and Modeling of Urban Land Expansion by the Integration of Cellular Automata and Markov chain. ISPRS Int. J. Geo-Inf. 2018, 7, 154. [Google Scholar] [CrossRef]
- Fine, S.; Singer, Y.; Tishby, N. The Hierarchical Hidden Markov Model: Analysis and Applications. Mach. Learn. 1998, 32, 41–62. [Google Scholar] [CrossRef]
- Torbati, A.H.H.N.; Picone, J. A Doubly Hierarchical Dirichlet Process Hidden Markov Model with a Non-Ergodic Structure. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 174–184. [Google Scholar] [CrossRef]
- Marco, E.; Meuleman, W.; Huang, J.L.; Glass, K.; Pinello, L.; Wang, J.R.; Kellis, M.; Yuan, G.C. Multi-scale chromatin state annotation using a hierarchical hidden Markov model. Nat. Commun. 2017, 8. [Google Scholar] [CrossRef] [PubMed]
- Ronao, C.A.; Cho, S.B. Recognizing human activities from smartphone sensors using hierarchical continuous hidden Markov models. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef] [Green Version]
- Kong, W.; Dong, Z.; Hill, D.J.; Ma, J.; Zhao, J.; Luo, F. A Hierarchical Hidden Markov Model Framework for Home Appliance Modeling. IEEE Trans. Smart Grid 2018, 9, 3079–3090. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, W.; Wang, W.; Deng, Y.; He, B.; Jia, K. The Impact of Precipitation Deficit and Urbanization on Variations in Water Storage in the Beijing-Tianjin-Hebei Urban Agglomeration. Remote Sens. 2017, 10, 4. [Google Scholar] [CrossRef]
- Tian, Y.C.; Yin, K.; Lu, D.S.; Hua, L.Z.; Zhao, Q.J.; Wen, M.P. Examining Land Use and Land Cover Spatiotemporal Change and Driving Forces in Beijing from 1978 to 2010. Remote Sens. 2014, 6, 10593–10611. [Google Scholar] [CrossRef] [Green Version]
- Roerink, G.J.; Menenti, M.; Verhoef, W. Reconstructing cloudfree NDVI composites using Fourier analysis of time series. Int. J. Remote Sens. 2000, 21, 1911–1917. [Google Scholar] [CrossRef]
- Atkinson, P.M.; Jeganathan, C.; Dash, J.; Atzberger, C. Inter-comparison of four models for smoothing satellite sensor time-series data to estimate vegetation phenology. Remote Sens. Environ. 2012, 123, 400–417. [Google Scholar] [CrossRef]
- Data Center of Lower Yellow River Regions, National Earth System Science Data Sharing Infrastructure, National Science & Technology Infrastructure of China. Available online: http://www.geodata.cn/ (accessed on 10 August 2018).
- Li, M.; Zhang, Z.; Lo Seen, D.; Sun, J.; Zhao, X. Spatiotemporal Characteristics of Urban Sprawl in Chinese Port Cities from 1979 to 2013. Sustainability 2016, 8, 1138. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: first mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Li, H.; Xiao, P.; Feng, X.; Yang, Y.; Wang, L.; Zhang, W.; Wang, X.; Feng, W.; Chang, X. Using Land Long-Term Data Records to Map Land Cover Changes in China Over 1981–2010. IEEE J. Sel. Top. Appl. Obs. Remote Sens. 2017, 10, 1372–1389. [Google Scholar] [CrossRef]
- Petitjean, F.; Inglada, J.; Gancarski, P. Satellite Image Time Series Analysis Under Time Warping. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3081–3095. [Google Scholar] [CrossRef]
- Murphy, K.P.; Paskin, M.A. Linear Time Inference in Hierarchical HMMs. In Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural Synthetic, Vancouver, BC, Canada, 3–8 December 2001; pp. 833–840. Available online: http://papers.nips.cc/paper/2050-linear-time-inference-in-hierarchical-hmms.pdf (accessed on 5 September 2018).
- Murphy, K.P. Dynamic Bayesian Networks: Representation, Inference and Learning. Ph.D. Thesis, The University of Californi, Berkeley, CA, USA, 2002. Available online: https://pdfs.semanticscholar.org/60ed/db80f54c796750a8173f2abea3bc85a62322.pdf (accessed on 5 September 2018).
- Duong, T.V.; Bui, H.H.; Phung, D.Q.; Venkatesh, S. Activity Recognition and Abnormality Detection with the Switching Hidden Semi-Markov Model. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 838–845. [Google Scholar]
- Cartella, F.; Lemeire, J.; Dimiccoli, L.; Sahli, H. Hidden Semi-Markov Models for Predictive Maintenance. Math. Probl. Eng. 2015, 2015, 1–23. [Google Scholar] [CrossRef]
- Nitze, I.; Barrett, B.; Cawkwell, F. Temporal optimisation of image acquisition for land cover classification with Random Forest and MODIS time-series. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 136–146. [Google Scholar] [CrossRef]
- Kiptala, J.K.; Mohamed, Y.; Mul, M.L.; Cheema, M.J.M.; Van der Zaag, P. Land use and land cover classification using phenological variability from MODIS vegetation in the Upper Pangani River Basin, Eastern Africa. PHYS CHEM EARTH A/B/C 2013, 66, 112–122. [Google Scholar] [CrossRef]
- Colditz, R.R.; Schmidt, M.; Conrad, C.; Hansen, M.C.; Dech, S. Land cover classification with coarse spatial resolution data to derive continuous and discrete maps for complex regions. Remote Sens. Environ. 2011, 115, 3264–3275. [Google Scholar] [CrossRef]
- Levin, N.; Lugass, R.; Ramon, U.; Braun, O.; Ben-Dor, E. Remote sensing as a tool for monitoring plasticulture in agricultural landscapes. Int. J. Remote Sens. 2007, 28, 183–202. [Google Scholar] [CrossRef]
- Wu, W.; Zhao, S.; Zhu, C.; Jiang, J. A comparative study of urban expansion in Beijing, Tianjin and Shijiazhuang over the past three decades. Landsc. Urb. Plan. 2015, 134, 93–106. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, N.; Wang, X.; Liu, F.; Yang, L. A Comparative Study of Urban Expansion in Beijing, Tianjin and Tangshan from the 1970s to 2013. Remote Sens. 2016, 8, 496. [Google Scholar] [CrossRef]
- Zhang, X.; Friedl, M.A.; Schaaf, C.B.; Strahler, A.H.; Hodges, J.C.F.; Gao, F.; Reed, B.C.; Huete, A. Monitoring vegetation phenology using MODIS. Remote Sens. Environ. 2003, 84, 471–475. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction | Reference | |||
|---|---|---|---|---|
| Stable Pixels | Changed Pixels | Total | User’s Accuracy (%) | |
| Stable pixels | 1437 | 25 | 1462 | 98.29 |
| Changed pixels | 26 | 744 | 770 | 96.62 |
| Total | 1463 | 769 | 2232 | - |
| Producer’s Accuracy (%) | 98.22 | 96.75 | - | - |
| Overall Accuracy = 97.72% Kappa coefficient = 0.950 | ||||
| Prediction | Reference | |||
|---|---|---|---|---|
| Stable Pixels | Changed Pixels | Total | User’s Accuracy (%) | |
| Stable pixels | 1422 | 111 | 1533 | 92.76 |
| Changed pixels | 41 | 658 | 699 | 94.13 |
| Total | 1463 | 769 | 2232 | - |
| Producer’s Accuracy (%) | 97.20 | 85.57 | - | - |
| Overall Accuracy = 93.19% Kappa coefficient = 0.846 | ||||
| Prediction | Reference | |||
|---|---|---|---|---|
| Stable Pixels | Changed Pixels | Total | User’s Accuracy (%) | |
| Stable pixels | 1443 | 64 | 1507 | 95.75 |
| Changed pixels | 20 | 705 | 725 | 97.24 |
| Total | 1463 | 769 | 2232 | - |
| Producer’s Accuracy (%) | 98.63 | 91.68 | - | - |
| Overall Accuracy = 96.24% Kappa coefficient = 0.916 | ||||
| Prediction | Reference | |||
|---|---|---|---|---|
| Stable Pixels | Changed Pixels | Total | User’s Accuracy (%) | |
| Stable pixels | 1446 | 49 | 1495 | 96.72 |
| Changed pixels | 17 | 720 | 737 | 97.69 |
| Total | 1463 | 769 | 2232 | - |
| Producer’s Accuracy (%) | 98.84 | 93.63 | - | - |
| Overall Accuracy = 97.04% Kappa coefficient = 0.933 | ||||
| Prediction | Reference | |||
|---|---|---|---|---|
| Stable Pixels | Changed Pixels | Total | User’s Accuracy (%) | |
| Stable pixels | 1409 | 103 | 1512 | 93.19 |
| Changed pixels | 54 | 666 | 720 | 92.50 |
| Total | 1463 | 769 | 2232 | - |
| Producer’s Accuracy (%) | 96.31 | 86.61 | - | - |
| Overall Accuracy = 92.97% Kappa coefficient = 0.842 | ||||
| Prediction | Reference | Temporal Accuracy (%) | Temporal Accuracy ± 1 yr (%) | |
|---|---|---|---|---|
| Correct | Total | |||
| The proposed method | 555 | 744 | 74.60 | 86.29 |
| RF-TF | 508 | 720 | 70.56 | 85.83 |
| CCDC | 324 | 666 | 48.65 | 74.77 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Lin, L.; Chen, J.; Sahli, H.; Chen, Y.; Wang, C.; Wu, B. A New Framework for Modelling and Monitoring the Conversion of Cultivated Land to Built-up Land Based on a Hierarchical Hidden Semi-Markov Model Using Satellite Image Time Series. Remote Sens. 2019, 11, 210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020210
Yuan Y, Lin L, Chen J, Sahli H, Chen Y, Wang C, Wu B. A New Framework for Modelling and Monitoring the Conversion of Cultivated Land to Built-up Land Based on a Hierarchical Hidden Semi-Markov Model Using Satellite Image Time Series. Remote Sensing. 2019; 11(2):210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020210
Chicago/Turabian StyleYuan, Yuan, Lei Lin, Jingbo Chen, Hichem Sahli, Yixiang Chen, Chengyi Wang, and Bin Wu. 2019. "A New Framework for Modelling and Monitoring the Conversion of Cultivated Land to Built-up Land Based on a Hierarchical Hidden Semi-Markov Model Using Satellite Image Time Series" Remote Sensing 11, no. 2: 210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020210