Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry

 , , ,
, , ,  , , , ,
, , , ,  , and
, and
Abstract
:1. Introduction
2. Material and Methods
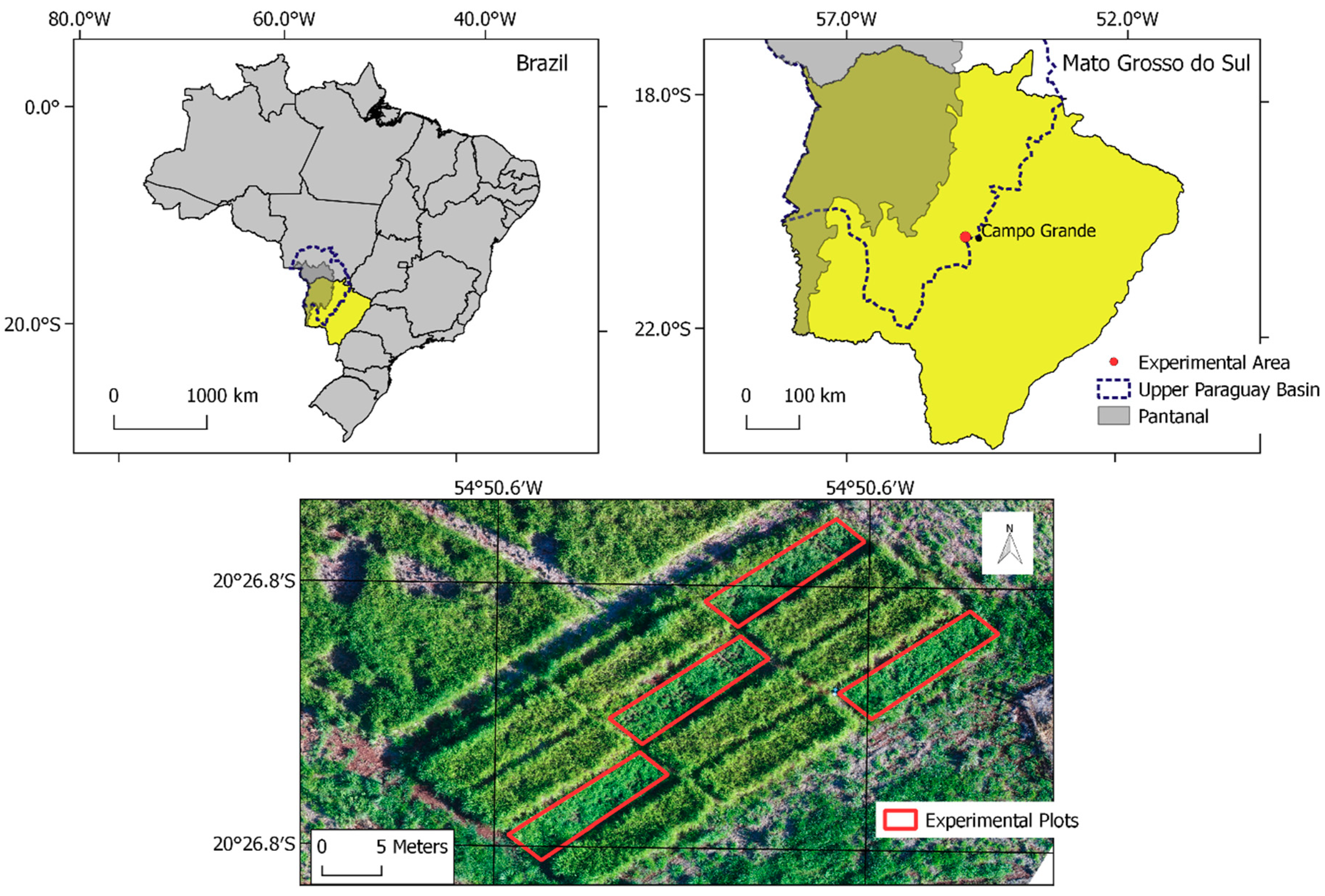
2.1. Experimental Area
2.2. Biomass Sampling and Height
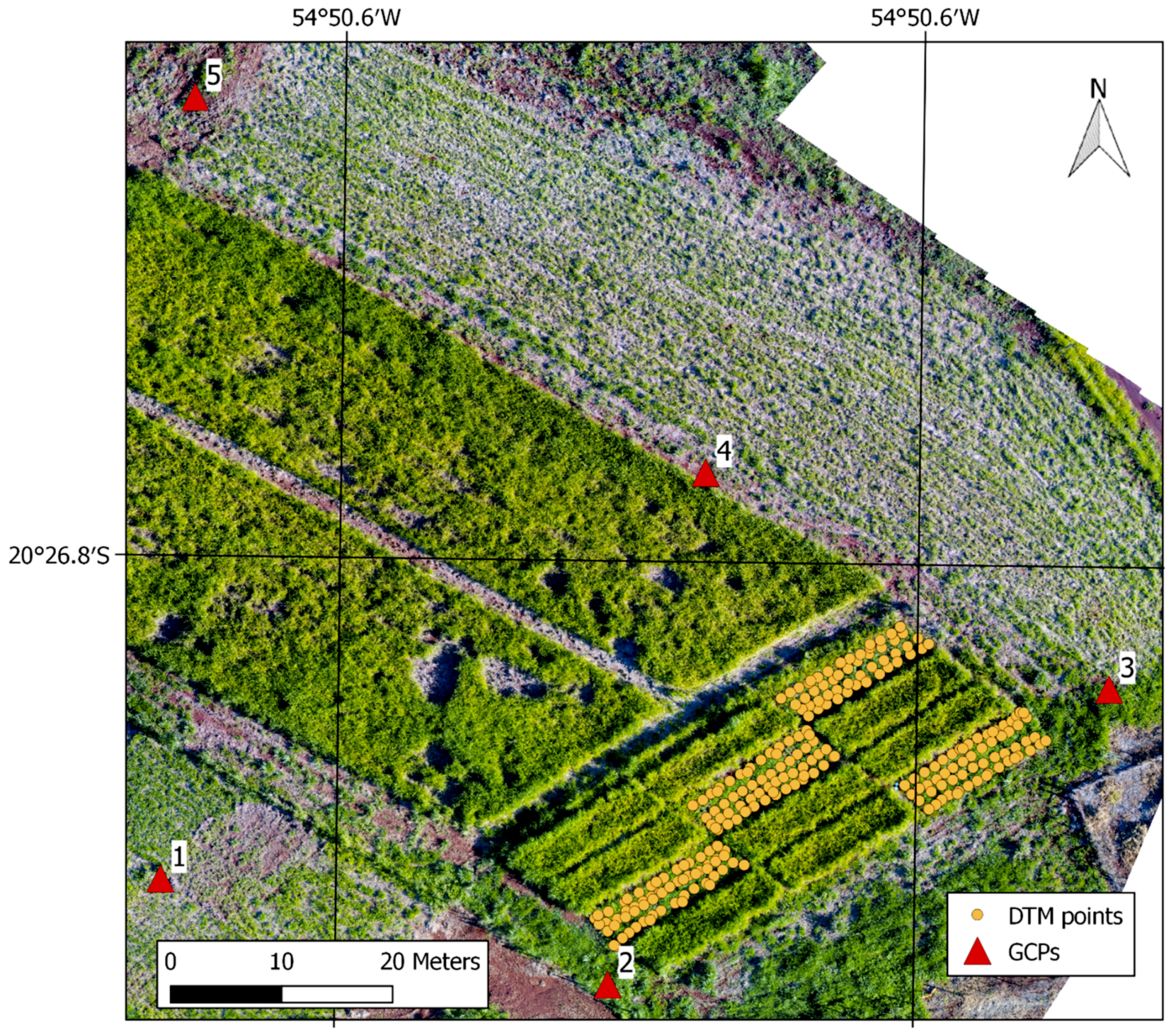
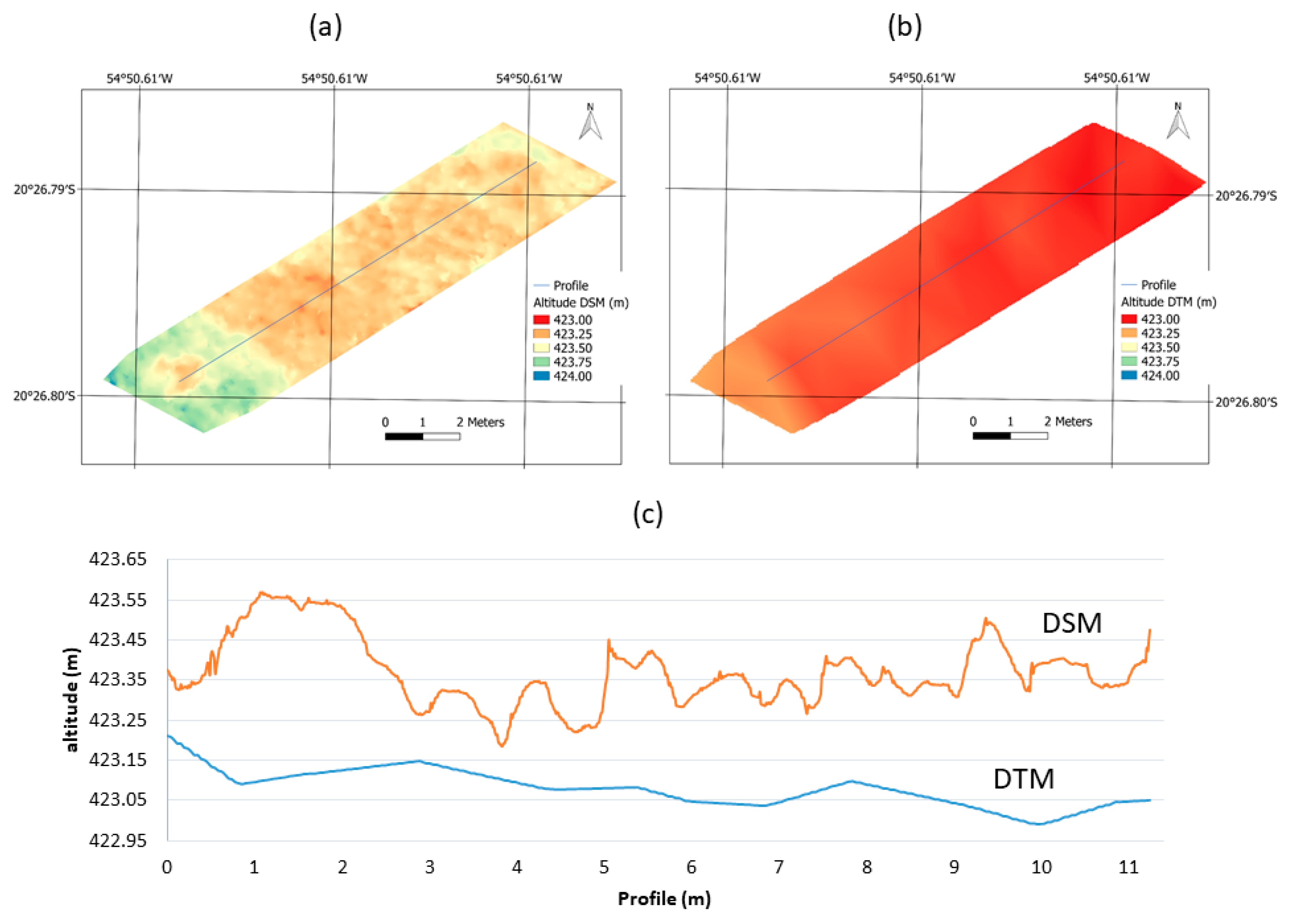
2.3. Image Collection and Processing
2.4. Statistical Analysis
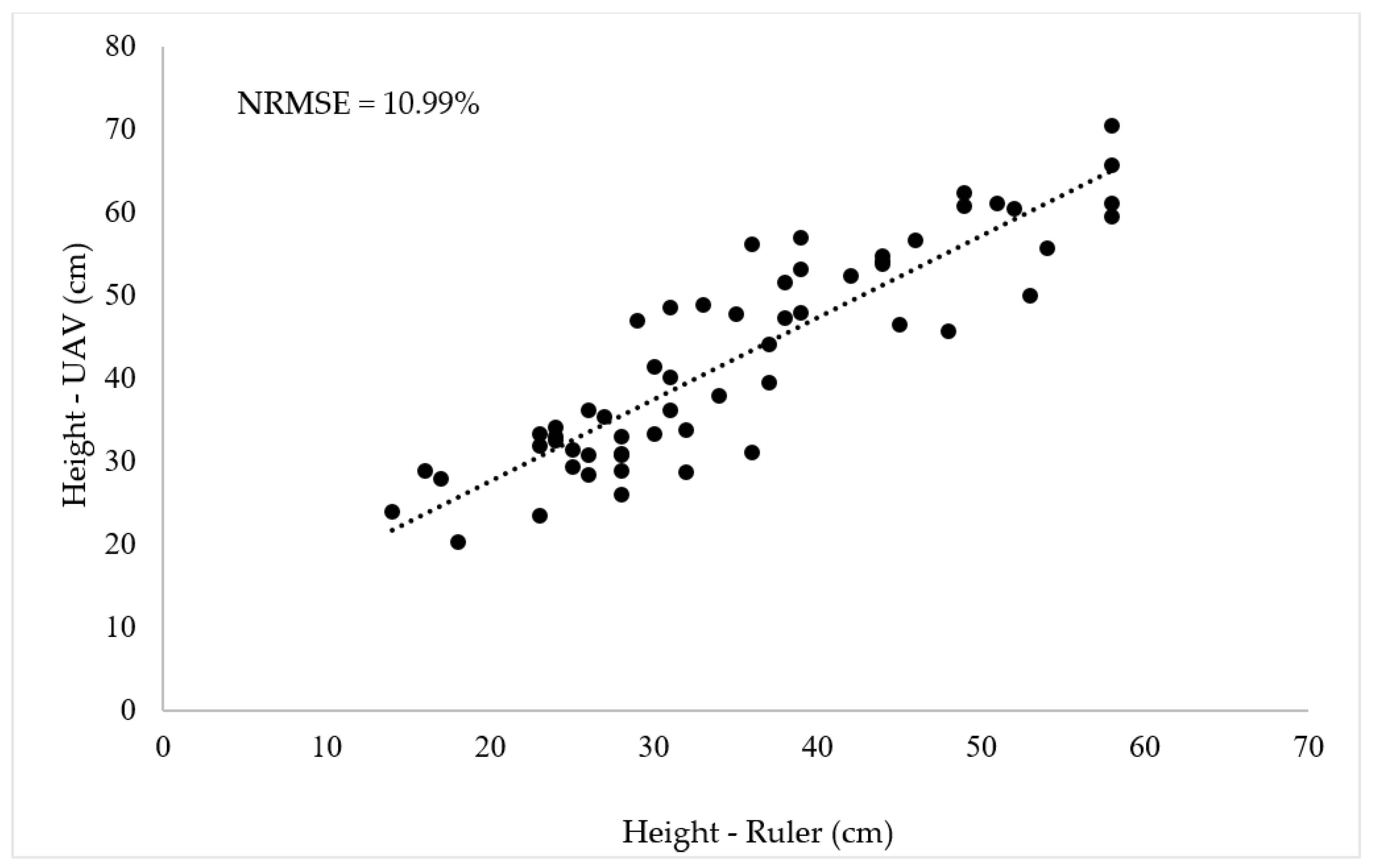
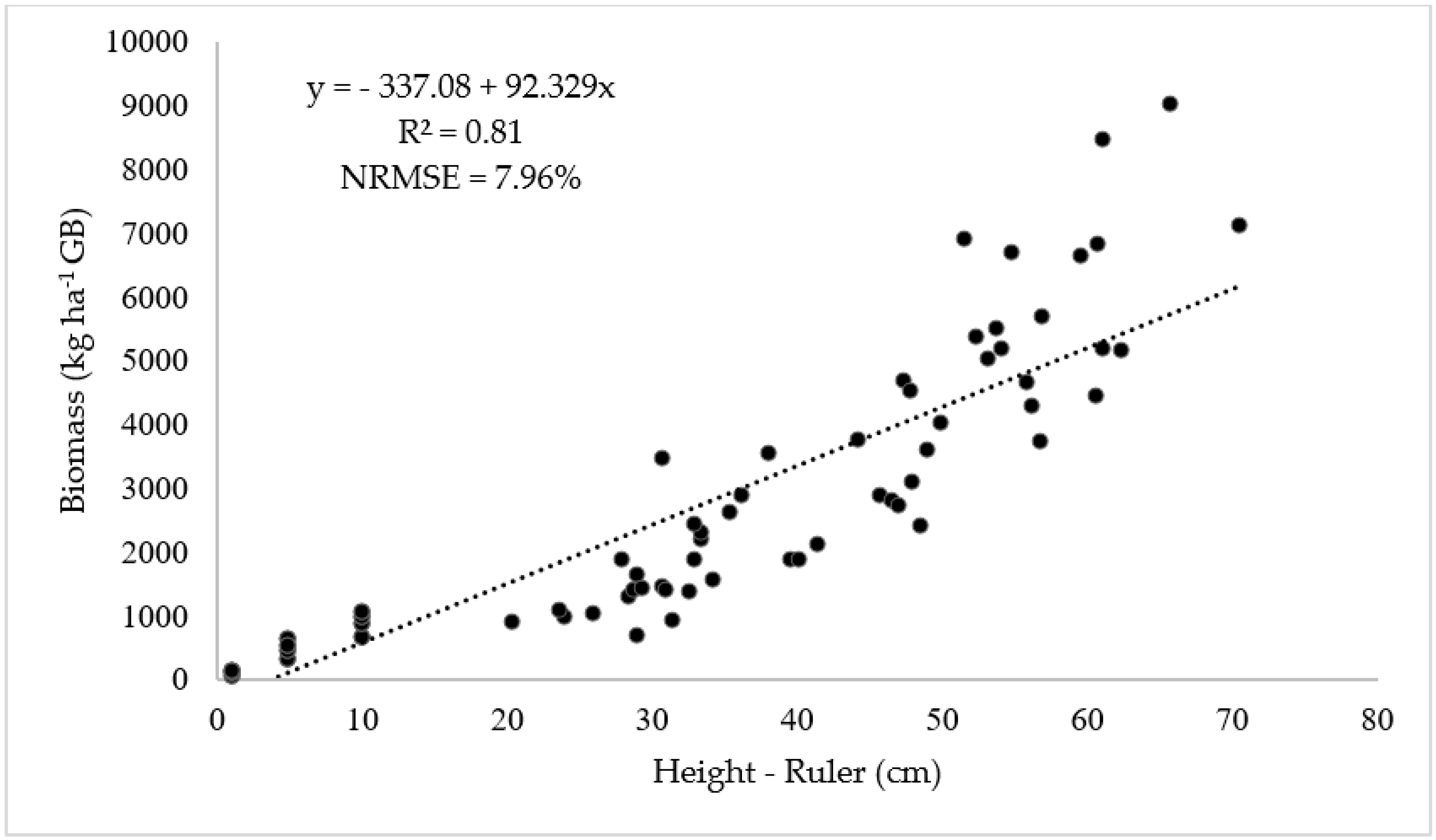
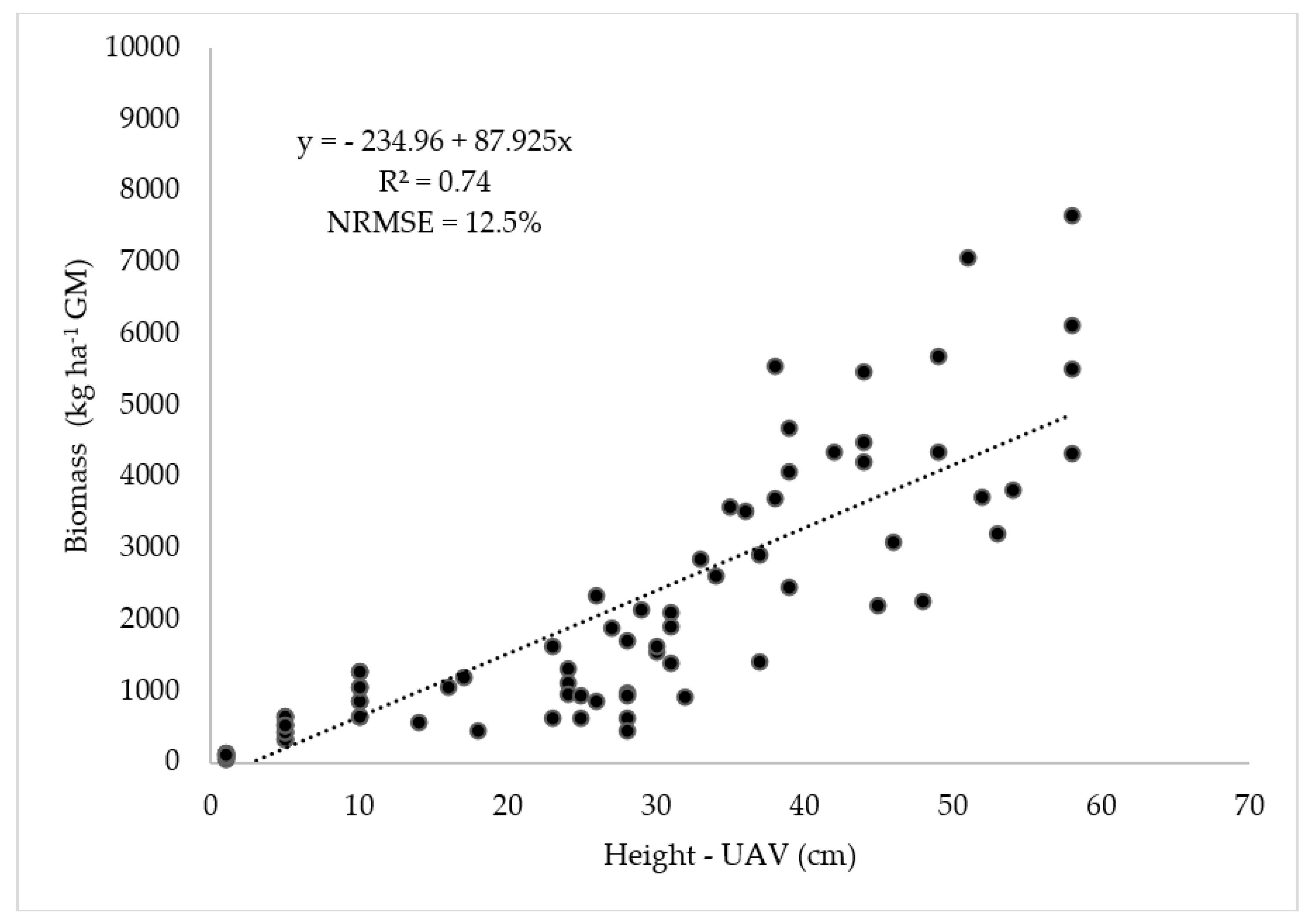
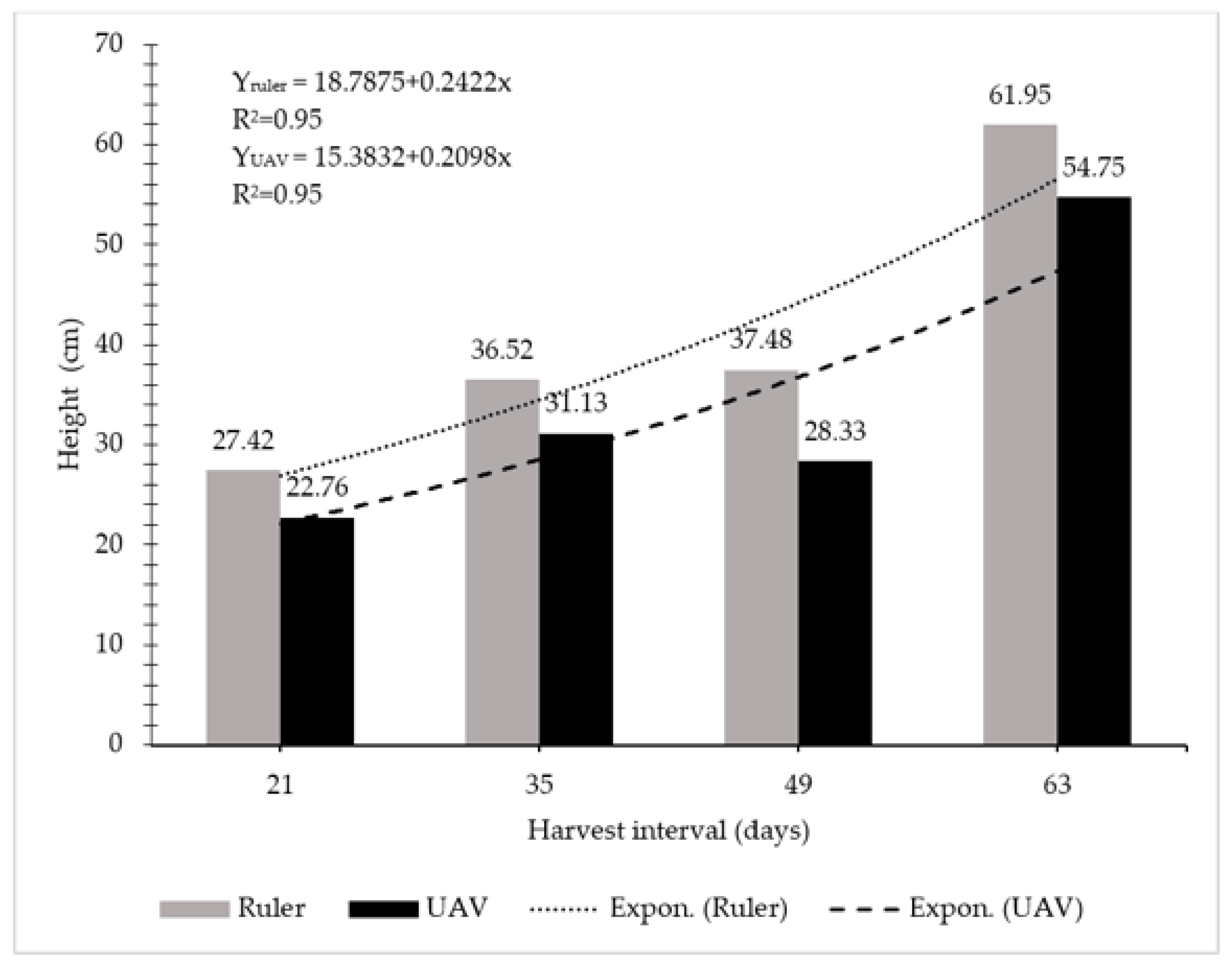
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IBGE 2006 Censo Agropecuário. Instituto Brasileiro de Geografia e Estatística. Available online: https://www.ibge.gov.br/estatisticas-novoportal/economicas/agricultura-epecuaria/9827censo-agropecuario.html?=&t=resultados (accessed on 16 May 2018).
- USDA. 2018.Livestock and Poultry: World Markets and Trade. Foreign Agricultural Service. 2018. Available online: https://apps.fas.usda.gov/psdonline/circulars/livestock_poultry.pdf (accessed on 16 May 2018).
- Ferraz, J.B.S.; Felício, P.E.D. Production systems—An example from Brazil. Meat Sci. 2010, 84, 238–243. [Google Scholar] [CrossRef] [PubMed]
- Rouquette, F.M., Jr. Invited Review: The roles of forage management, forage quality, and forage allowance in grazing research. Prof. Anim. Sci. 2016, 32, 10–18. [Google Scholar] [CrossRef]
- Hodgson, J. Nomenclature and definitions in grazing studies. Grass Forage Sci. 1979, 34, 11–17. [Google Scholar] [CrossRef]
- Yang, H.; Wang, L.; Xiang, L.; Wu, Q.; Jiang, H. Automatic Non-Destructive Growth Measuremen Leafy Vagetables Based on Kinect. Sensors 2018, 18, 806. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV Fligtht Experiments Applied to the Remote Sensing of Vegetated Areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
- López, J.J.; Mulero-Pázmány, M. Drones for Conservation in Protected Areas: Present and Future. Drones 2019, 3, 10. [Google Scholar] [CrossRef]
- Yu, N.; Li, L.; Schmitz, N.; Tian, L.F.; Greenberg, J.A.; Diers, B.W. Development of methods to improve soybean yield estimation and predict plant maturity with an unmanned aerial vehicle based platform. Remote Sens. Environ. 2016, 187, 91–101. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Andrieu, B.; Burger, P.; Hemmerlé, M. Estimation of Wheat Plant Density at Early Stages Using High Resolution Imagery. Front. Plant. Sci. 2017, 8, 739. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, N.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Moeckel, T.; Dayananda, S.; Nidamanuri, R.R.; Nautiyal, S.; Hanumaiah, N.; Buerkert, A.; Wachendorf, M. Estimation of Vegetable Crop Parameter by Multi-temporal UAV-Borne Images. Remote Sens. 2018, 10, 805. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jackson, M.W. An Unmanned Aerial Vehicle for Rangeland and Protography. Rangel. Ecol. Manag. 2005, 58, 439–442. [Google Scholar] [CrossRef]
- Wang, D.; Xin, X.; Shao, Q.; Brolly, M.; Zhu, Z.; Chen, J. Modeling Aboveground Biomass in Hulumber Grassland Ecosystem by Using Unmanned Aerial Vehicle Discrete Lidar. Sensors 2017, 17, 180. [Google Scholar] [CrossRef] [PubMed]
- Jin, Y.; Yang, X.; Qiu, J.; Li, J.; Gao, T.; Wu, Q.; Zhao, F.; Ma, H.; Yu, H.; Xu, B. Remote Sensing-Based Biomass Estimation and Its Spatio-Temporal Variations in Temperate Grassland, Northern China. Remote Sens. 2014, 6, 1496–1513. [Google Scholar] [CrossRef] [Green Version]
- Capolupo, A.; Kooistra, L.; Berendonk, C.; Boccia, L.; Suomalainen, J. Estimating Plant Traits of Grasslands from UAV-Acquired Hyperspectral Images: A Comparison of Statistical Approaches. Int. J. Geo Inf. 2015, 4, 2792–2820. [Google Scholar] [CrossRef]
- Lu, B.; He, Y. Species classification using Unmanned Aerial Vehicle (UAV)-acquired high spatial resolution imagery in a heterogeneous grassland. ISPRS J. Photogram. Remote Sens. 2017, 128, 73–85. [Google Scholar] [CrossRef]
- Brocks, S.; Bareth, G. Estimating Barley Biomass with Crop Surface Models. Remote Sens. 2018, 10, 268. [Google Scholar] [CrossRef]
- Castro, A.I.; Sánchez, J.T.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef]
- Leitão, J.P.; Moy de Vitry, M.; Scheidegger, A.; Rieckermann, J. Assessing the quality of digital elevation models obtained from mini unmanned aerial vehicles for overland flow modelling in urban areas. Hydrol. Earth Syst. Sci. 2016, 20, 1637–1653. [Google Scholar] [CrossRef] [Green Version]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Strecha, C. Pix4D-Error Estimation. White Paper 2014, 1, 1–3. [Google Scholar]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A critical review of automated photogrammetric processing of large datasets. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2017, 42, 591–599. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. B Biol. Sci. 1979, 203, 405–426. [Google Scholar] [PubMed]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 519–528. [Google Scholar] [CrossRef]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Structure from motion (SFM) photogrammetry. In Geomorphological Techniques (Online Edition); Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2015. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the International Conference on Computer Vision, Corfu, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar]
- Martínez-carricondo, P.; Agüera-vega, F.; Carvajal-ramírez, F.; Mesas-carrascosa, F.; García-ferrer, A.; Pérez-porras, F. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Florinsk, I.V. Computation of the third-order partial derivatives from a digital elevation model. Int. J. Geogr. Inf. Sci. 2009, 23, 213–231. [Google Scholar] [CrossRef]
- Geipel, J.; Link, J.; Claupein, W. Combined spectral and spatial modeling of corn yield based on aerial images and crop surface models acquired with an unmanned aircraft system. Remote Sens. 2014, 6, 10335–10355. [Google Scholar] [CrossRef]
- Terra Lopes, M.L.; Carvalho, P.C.F.; Anghinoni, I.; Santos, D.T.; Aguinaga, A.A.Q.; Flores, J.P.C.; Moraes, A. Sistema de integração lavoura-pecuária: Efeito do manejo da altura em pastagem de aveia preta e azevém anual sobre o rendimento da cultura da soja o da altura em pastagem de aveia preta e azevém anual. Ciência Rural 2009, 39, 1499–1506. [Google Scholar] [CrossRef]
- Casagrande, D.R.; Ruggieri, A.C.; Jamusckiewicz, E.R.; Gomide, J.A.; Reis, R.A.; Valente, A.L.S. Características morfogênicas e estruturais do capim-maramdu manejado sob pastejo intermitente com diferentes ofertas de forragem. Revista Brasileira de Zootecnia 2010, 39, 2108–2115. [Google Scholar] [CrossRef]
- Ehlert, D.; Adamek, R.; Horn, H. Laser rangefinder-based measuring of crop biomass under field conditions. Prec. Agric. 2009, 10, 395–408. [Google Scholar] [CrossRef]
- Zhang, L.; Grift, T.E. A LIDAR-based crop height measurement system for Miscanthus giganteus. Comput. Electron. Agric. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Maranhão, C.M.A.; Bonomo, P.; Pires, A.J.V.; Costa, A.C.P.R.; Martins, G.C.F.; Cardoso, E.O. Características produtivas do capim-braquiária submetido a intervalos de cortes e adubação nitrogenada durante três estações. Acta Sci. Anim. Sci. 2010, 32, 375–384. [Google Scholar] [CrossRef]
- Ansah, T.; Osafo, E.L.K.; Hansen, H.H. Herbage yield and chemical composition of four varieties of Napier (Pennisetum purpureum) grass harvested at three different days after planting. Agric. Biol. J. N. Am. 2010, 5, 923–929. [Google Scholar] [CrossRef]
- Oliveira, M.A.; Pereira, O.G.; Garcia, R.; Obeid, J.A.; Cecon, P.R.; Moraes, S.A.; Silveira, P.R. Rendimento e Valor Nutritivo do Capim-Tifton 85 (Cynodon spp.) em Diferentes Idades de Rebrota. Revista Brasileira de Zootecnia 2000, 29, 1949–1960. [Google Scholar]
- Costa, N.L.; Paulinoi, V.T.; Townsendi, C.R.; Magalhães, J.A.; Oliveira, J.R.C. Desempenho agronômico de genótipos de Brachiaria brizantha em diferentes idades de corte em Porto Velho, Rondônia, Brasil (Agronomic performance of Brachiaria Brizantha genotypes in Porto Velho, Rondônia, Brazil). Revista Electrónica de Veterinária 2007, 8, 1–5. [Google Scholar]
- Rodrigues, M.M.; Oliveira, M.E.; Moura, R.L.; Rufino, M.O.A.; Silva, W.K.A.; Nascimento, M.P.S.C.B. Forage intake and behavior of goats on Tanzania-grass pasture at two regrowth ages. Acta Scientiarum. Anim. Sci. 2013, 35, 37–41. [Google Scholar] [CrossRef]
- Geleti, D.; Tolera, A. Effect of age of regrowth on yield and herbage quality of Panicum coloratum under sub humid climatic conditions of Ethiopia. Afr. J. Agric. 2013, 8, 5841–5844. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| pH (CaCl2) | pH (H2O) | P | K | Ca | Mg | Ca + Mg | Al | H + Al | CEC | MO g dm−3 | V (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| cmol dm−3 | |||||||||||
| 5.31 | 5.91 | 0.04 | 0.20 | 7.35 | 1.20 | 8.55 | 0.00 | 5.18 | 13.93 | 35.34 | 62.81 |
| Harvest Intervals | ||||
|---|---|---|---|---|
| 21 Days | 35 Days | 49 Days | 63 Days | |
| 1st cut | 30/10/17 | 13/11/17 | 29/11/17 | 12/12/17 |
| 2nd cut | 17/11/17 | 17/12/17 | 15/01/18 | 09/02/18 |
| 3rd cut | 12/12/17 | 22/01/18 | 05/03/18 | - |
| 4th cut | 01/01/18 | 26/02/18 | - | - |
| 5th cut | 22/01/18 | 02/04/18 | - | - |
| 6th cut | 09/02/18 | - | - | - |
| 7th cut | 05/03/18 | - | - | - |
| Check Point (Id) | Error X (m) | Error Y (m) | Error Z (m) |
|---|---|---|---|
| 1 | −0.0265 | −0.0300 | −0.0363 |
| 2 | 0.0066 | 0.0229 | 0.0312 |
| 3 | −0.0336 | −0.0041 | −0.0445 |
| 4 | 0.0151 | 0.0038 | −0.0386 |
| 5 | 0.0192 | 0.0039 | 0.0565 |
| Mean | −0.0038 | −0.0007 | −0.0063 |
| Sigma | 0.0210 | 0.0131 | 0.0402 |
| RMSE | 0.0222 | 0.0172 | 0.0423 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Batistoti, J.; Marcato Junior, J.; Ítavo, L.; Matsubara, E.; Gomes, E.; Oliveira, B.; Souza, M.; Siqueira, H.; Salgado Filho, G.; Akiyama, T.; et al. Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry. Remote Sens. 2019, 11, 2447. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11202447
Batistoti J, Marcato Junior J, Ítavo L, Matsubara E, Gomes E, Oliveira B, Souza M, Siqueira H, Salgado Filho G, Akiyama T, et al. Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry. Remote Sensing. 2019; 11(20):2447. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11202447
Chicago/Turabian StyleBatistoti, Juliana, José Marcato Junior, Luís Ítavo, Edson Matsubara, Eva Gomes, Bianca Oliveira, Maurício Souza, Henrique Siqueira, Geison Salgado Filho, Thales Akiyama, and et al. 2019. "Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry" Remote Sensing 11, no. 20: 2447. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11202447