1. Introduction
Surveying and mapping play a very important role in various socioeconomic and national defense related construction projects. Especially, in regard to the overall issues and strategic decision making, most of these projects rely on the geospatial information obtained by surveying and mapping. Since space-based photogrammetry technology allows for fast updates and low-cost data acquisition that is not hindered by regional and national boundaries, countries around the world have been eager to develop their own surveying and mapping satellite programs. Geometric positioning accuracy is a key index to measure the mapping satellite performance and is a critical factor that constrains the accuracy of satellite image mapping data.
The geometrical positioning accuracy of surveying and mapping satellite is mainly limited by the attitude performance of the satellite platform which affects the precision of orientation parameters [
1]. Therefore, it is possible to achieve high geometric positioning accuracy by acquiring high-precision orientation parameters via the high-accuracy attitude determinations [
2] or by using a large number of ground control points to correct positioning errors [
3]. However, it is particularly paramount to ensure the positioning accuracy in cases of exterior orientation parameters with high uncertainty and scarce ground control data.
As a high-precision ranging instrument, laser altimeters are widely used in the field of aerospace photogrammetry to obtain high-precision vertical information because of their good directivity and high ranging accuracy. Space-borne laser altimetry systems such as the Geoscience Laser Altimetry System (GLAS) system [
4,
5], the Mars Orbiter Laser Altimeter (MOLA) system for the observation of Mars [
6,
7], the NEAR Laser Rangefinder (NLR) system for the observation of space asteroids [
8], the Clementine system [
9], as well as China’s ChangE-1 laser altimeter system [
10,
11] for lunar observations have been found to be useful in the exploration of celestial bodies such as the Earth, Moon, and Mars; these systems are the ones most commonly used to generate topographic models of celestial bodies.
In previous research involving optical stereoscopic mapping, compared with the horizontal accuracy, the vertical accuracy was found to be more difficult to achieve because of the influence of the base-to-height ratio, platform stability, and other factors [
12]. Consequently, integrating the stereo imagery and laser altimeter data has the potential to generate better accuracy, thereby making up for the defects such as poor attitude measurements and difficulty in obtaining ground control data.
At present, much of the work on the combined processing of optical camera images and laser altimeter data so far has focused on planetary observations, especially on the Moon and Mars.
In applications of Mars topographic mapping, the combined processing of optical imagery and laser altimeter data has been proposed. Anderson and Parker [
13] examined the precision registration between Mars Orbiter Camera (MOC) imagery and MOLA data at selected candidate landing sites. The integration of MOC imagery and MOLA data was further studied by Yoon and Shan [
14]. They introduced combined processing between the Mars Orbiter Camera (MOC) imagery and Mars Orbiter Laser Altimeter (MOLA) data using an adjustment method to correct the mis-registration and accurately determine ground positions. The results indicated that the large mis-registration between the two datasets can be corrected to a certain extent by the combined adjustment. Spiegel [
15] and Ebner et al. [
16] developed a high-resolution stereo camera (HRSC) imagery bundle adjustment technique, in which a sparse stereo point cloud was adjusted to optimize its fit to a surface interpolated from the MOLA data. The results showed the potential of the image matching and bundle adjustment approaches for achieving improved exterior and interior orientations with the MOLA digital terrain model (DTM) as control information. However, these methods failed to take into account the errors induced by MOLA data.
The integration of optical imagery and laser altimeter data also has been investigated in the applications of lunar topographic mapping. Rosiek et al. [
17] presented an endeavor to integrate the Clementine images with the Clementine laser altimeter data, in which the Clementine global mosaic was used to establish horizontal control and Clementine laser altimeter points (LAPs) were used for vertical control. Di et al. [
18] presented an integration method involving a lunar digital elevation model (DEM) derived from the Chang’E-1 stereo images and the laser altimeter data to reduce the inconsistencies between them. In their method, a DEM was generated first from the stereo images, and then the DEM was registered to the laser altimeter data through surface matching using an ICP (iterative closest point) algorithm [
19], after which the exterior orientation (EO) parameters of the images were adjusted so that the inconsistency between the charged-couple device (CCD) images and the laser altimeter data was significantly reduced by this co-registration. In order to reduce the inconsistencies between adjacent orbits, Di et al. [
20] further improved the co-registration of Chang’E-1 stereo images and Chang’E-1 laser altimeter data by incorporating a crossover adjustment of the laser altimeter data and refinement of the CCD image sensor model. In their method, crossover adjustment was employed to reduce the inconsistencies of different laser altimeter profiles, and this yielded more accurate and consistent control data; refinement of the image sensor model was realized by adding attitude angle bias corrections through a least-squares adjustment, from which consistency between the refined DEM from stereo imagery and LAPs is improved. However, both of the two methods were fixed in terms of the registration process and failed to consider the errors induced by laser altimeter data, which bring about the accuracy of the final generated topographic models; these models are totally dependent on the accuracy of the laser altimeter data.
In addition to co-registration, Wu et al. [
21] presented an endeavor to integrate the Chang’E-1 imagery and laser altimeter data for consistent and precision lunar topographic modeling through a combined adjustment with a local surface constraint, the LAPs, image EO parameters, and tie points collected from the stereo images were the participants, and the output included the refined image EO parameters and laser ground points. The proposed combined adjustment approach can reduce the mis-registrations between the imagery and the laser altimeter data by a maximum of 1–18 pixels in image space. However, the method introduced the local surface constraint in which the stereo images were adjusted to optimize the fit to a surface interpolated from the laser altimeter data and it failed to consider the orientation errors of the laser altimeter data. This will bring about error when the local surface interpolated from the laser altimeter data cannot describe the real surface accurately. Moreover, the method works only under the condition that there are enough laser ground points.
To support Earth observation applications, in 2003, the United States launched an Earth observation laser altimetry satellite, called the Ice, Cloud and land Elevation Satellite (ICESat), [
22], which is only equipped with GLAS and not with optical cameras. Most research uses ICESat altimeter data, as an elevation control in the block adjustment as Teo et al. [
23] and Yamanokuchi et al. [
24]. In this research, additional datasets (e.g., data from DEMs or laser altimeter data) were used as an absolute control and the adjustments were only made to the image data to adjust the images to fit the additional datasets. However, the accuracy of the final topographic models is dependent on the accuracy of the additional datasets. Thus, when there are only a few laser points, the method will not work well.
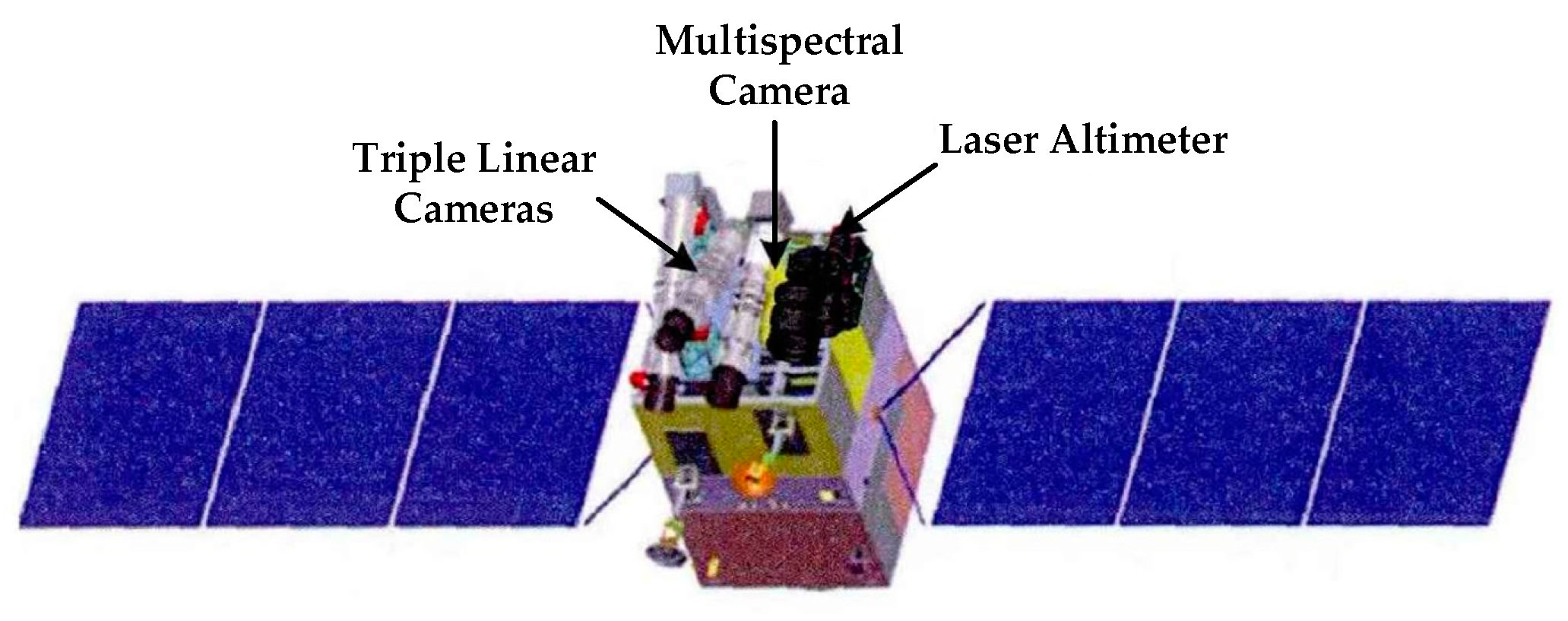
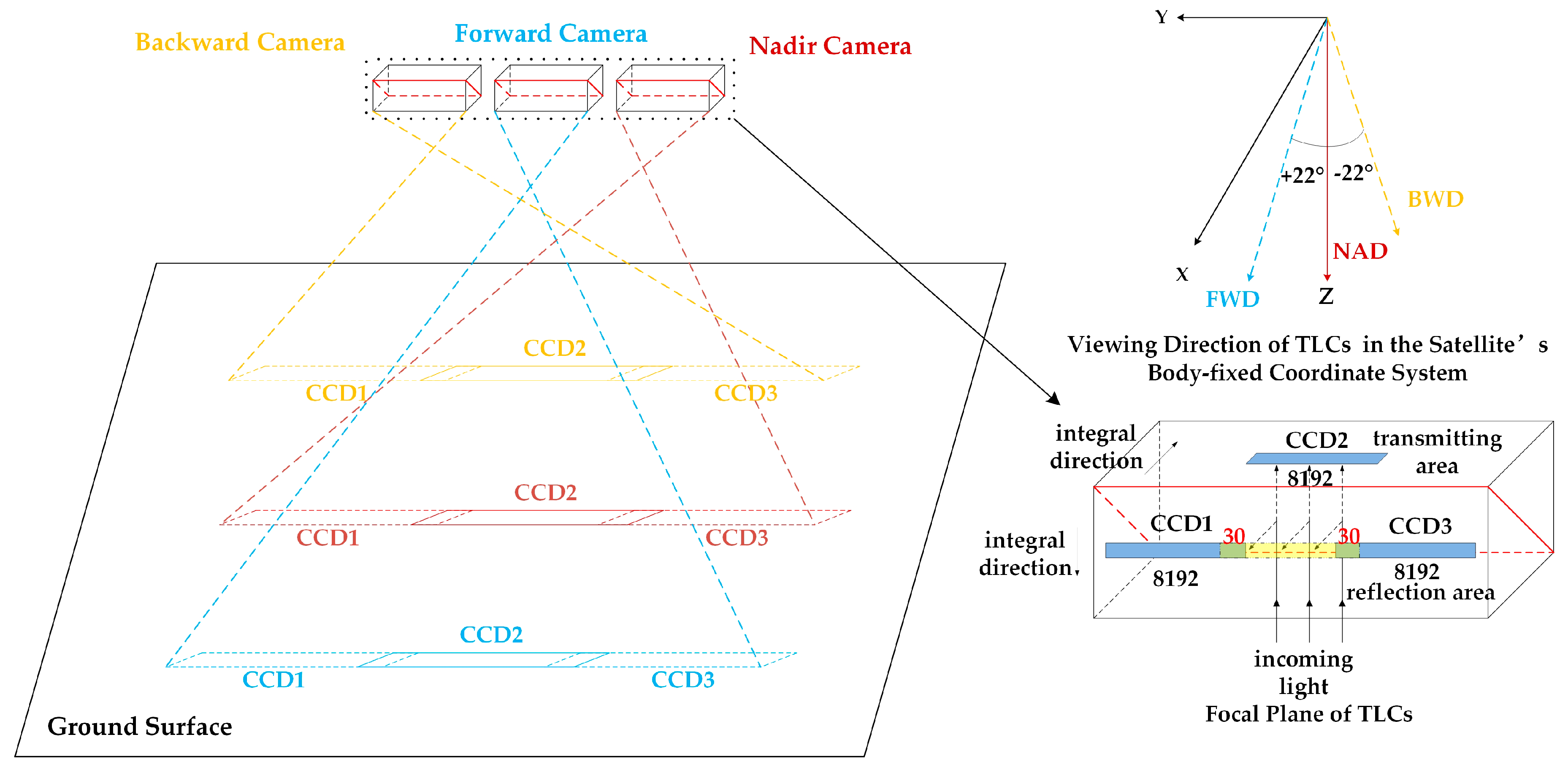
With the continuous improvement of China’s earth observation technology and the demand for large-scale stereo mapping, the idea of introducing geometric constraints provided by laser altimeter data to improve positioning accuracy has been put into practice. The recent Chinese ZY3-02 mission successfully produced 44 orbiter laser altimeter datasets. Subsequently, Tang et al. [
25] and Xie et al. [
26] built a rigorous geometric calibration model with pointing and ranging for correcting system errors of the laser altimeter onboard the ZY3-02 satellite, and this work realized high-precision in-orbit geometry calibration. It has been verified by Xie et al. [
26] that the laser precision is about 2–3 m in areas with a slope less than 2°, and the absolute accuracy is better than 1 m in flat areas after calibration. Li et al. [
27] performed experimental investigations of the integration of ZY3-02 satellite laser altimetry data and optical stereo images using combined adjustment by RFM with laser elevation constraint (RFM_EC) or RSM with laser ranging constraint (RSM_RC) with all result better than 3 m. However, there are two defects in their methods. On the one hand, the result obtained by RFM_EC is dependent on the laser altimeter data. On the other side, although the work also proposed the ranging constraint when using RSM, it failed to consider there exist attitude error for the altimeter because altimeter and stereo cameras are onboard the satellite.
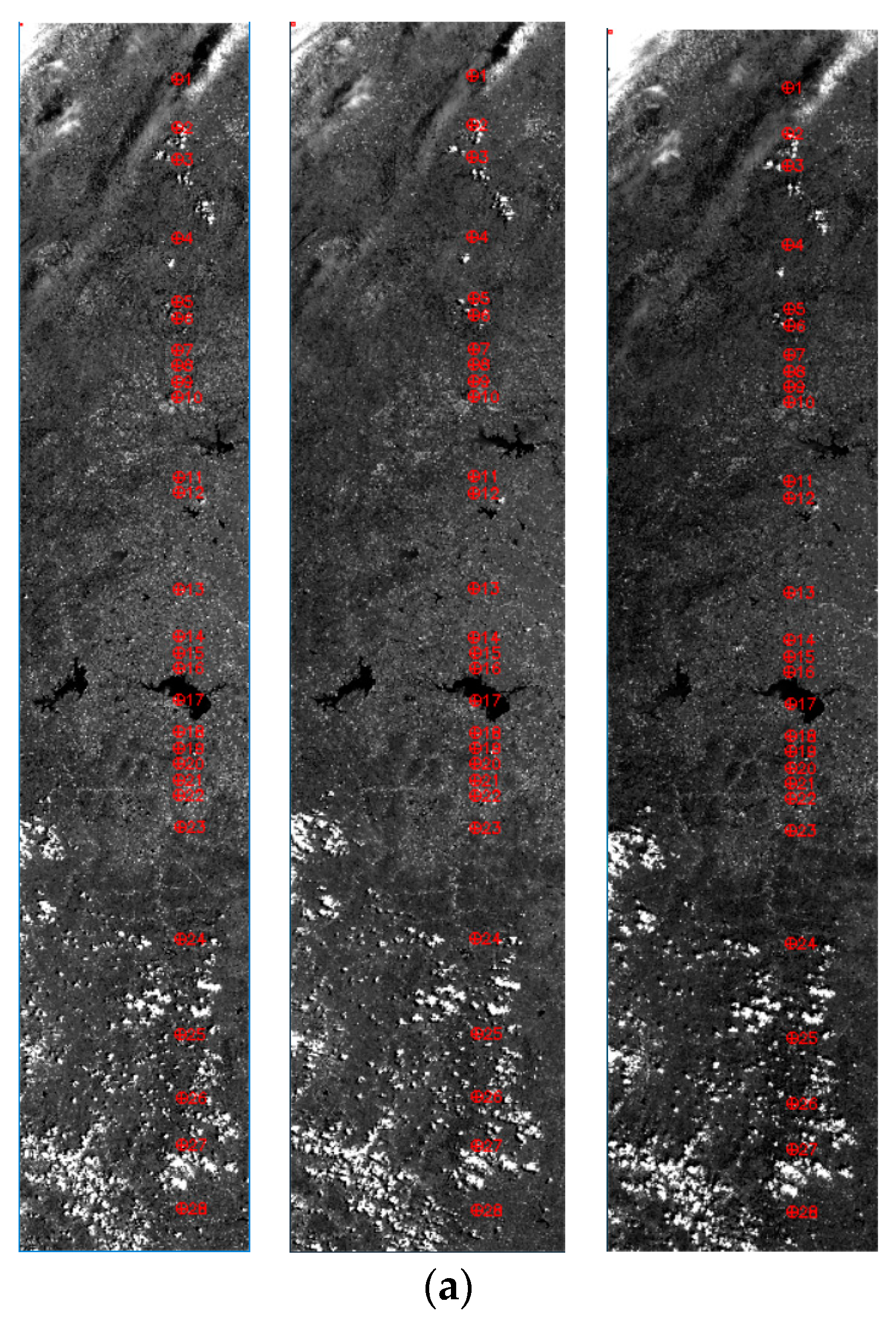
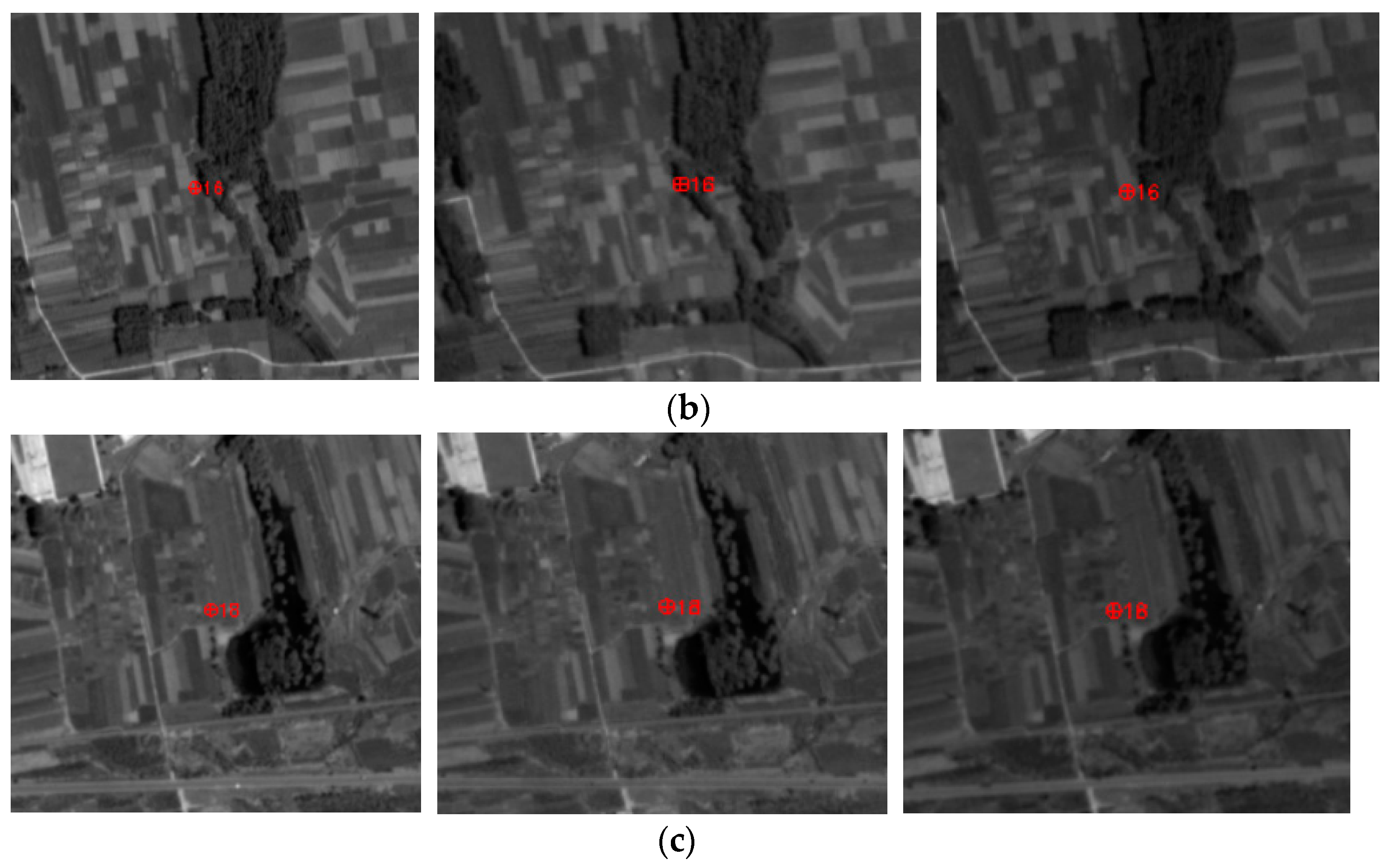
This paper presents an investigation into the integration of stereo imagery and laser altimeter data, which is achieved through combined adjustment with one constraint in image space so as to improve Earth topographic modeling. Compared with previous work, the proposed method highlights the following two aspects: (1) Laser ranging information is used as to improve the elevation accuracy of stereo images; (2) a constraint to minimize the back-projection discrepancies in image space is incorporated into the combined adjustment. Stereo images and laser altimeter data covering research areas in Songshan, Tianjin, Dengfeng, and Taihang were collected to conduct experiments, and a total of seven kinds of adjustment schemes were designed.
4. Discussion
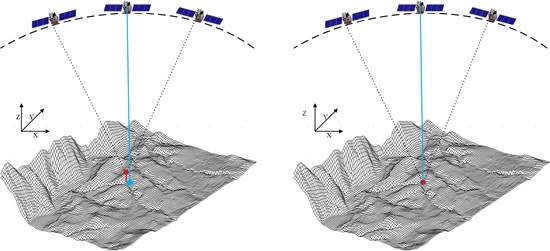
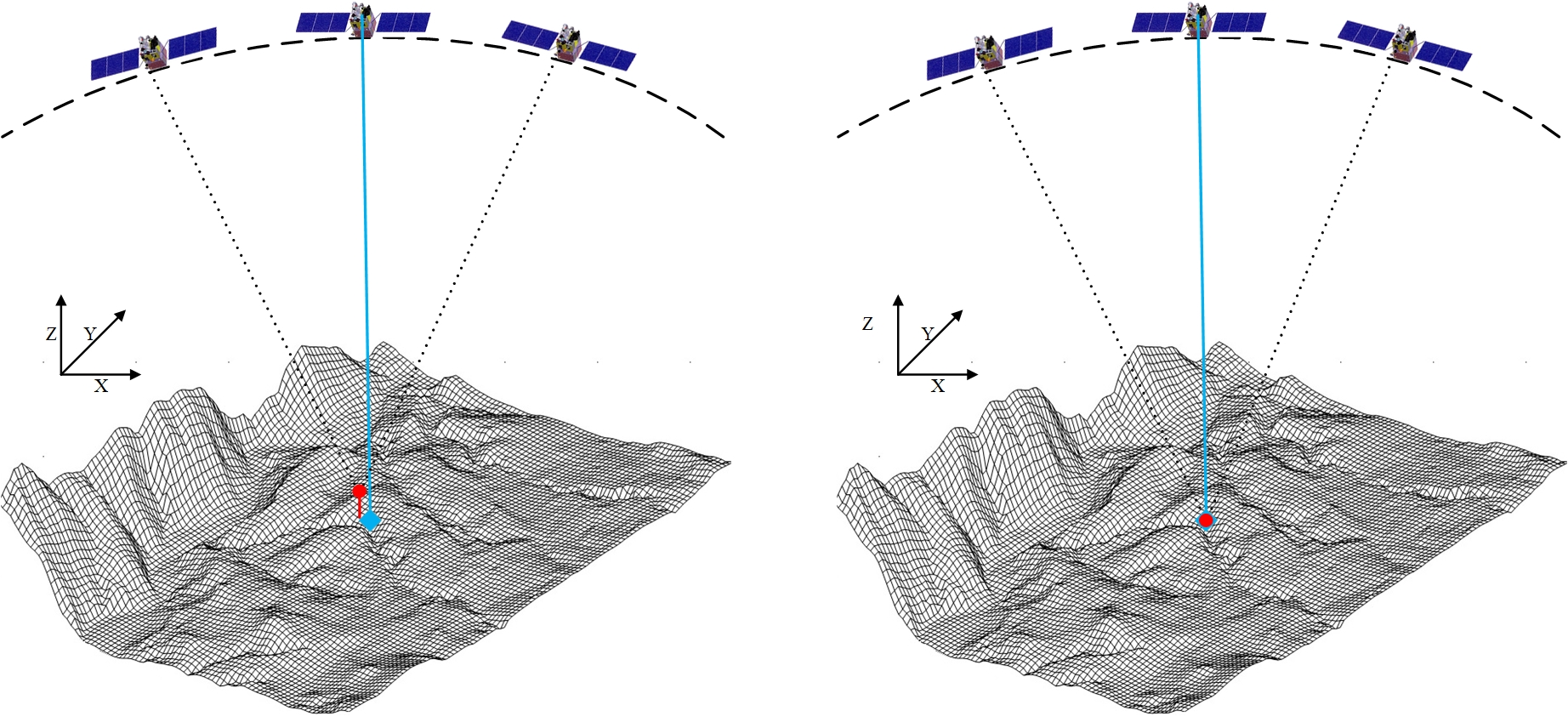
As mentioned previously, the image coordinates for the NAD camera derived by back-projecting the laser ground points can be treated as the intended position of laser ground points on the basis of the NAD camera and laser altimeter onboard ZY3-02 working together simultaneously and the installation angles of them being identical. However, the NAD camera images and corresponding laser altimeter data used in the experiments were captured at different times because simultaneously captured NAD images and laser altimeter data were unavailable due to satellite shooting schedule and limited data collection. Besides, due to the impact of the satellite launch and the physical environment changes in the orbit, the NAD camera and laser altimeter installation angles may slightly change. Therefore, the difference in the capture dates of the two datasets and the slightly different viewing angles could result in accuracy loss for the proposed combined adjustment, but the errors can be analyzed quantitatively.
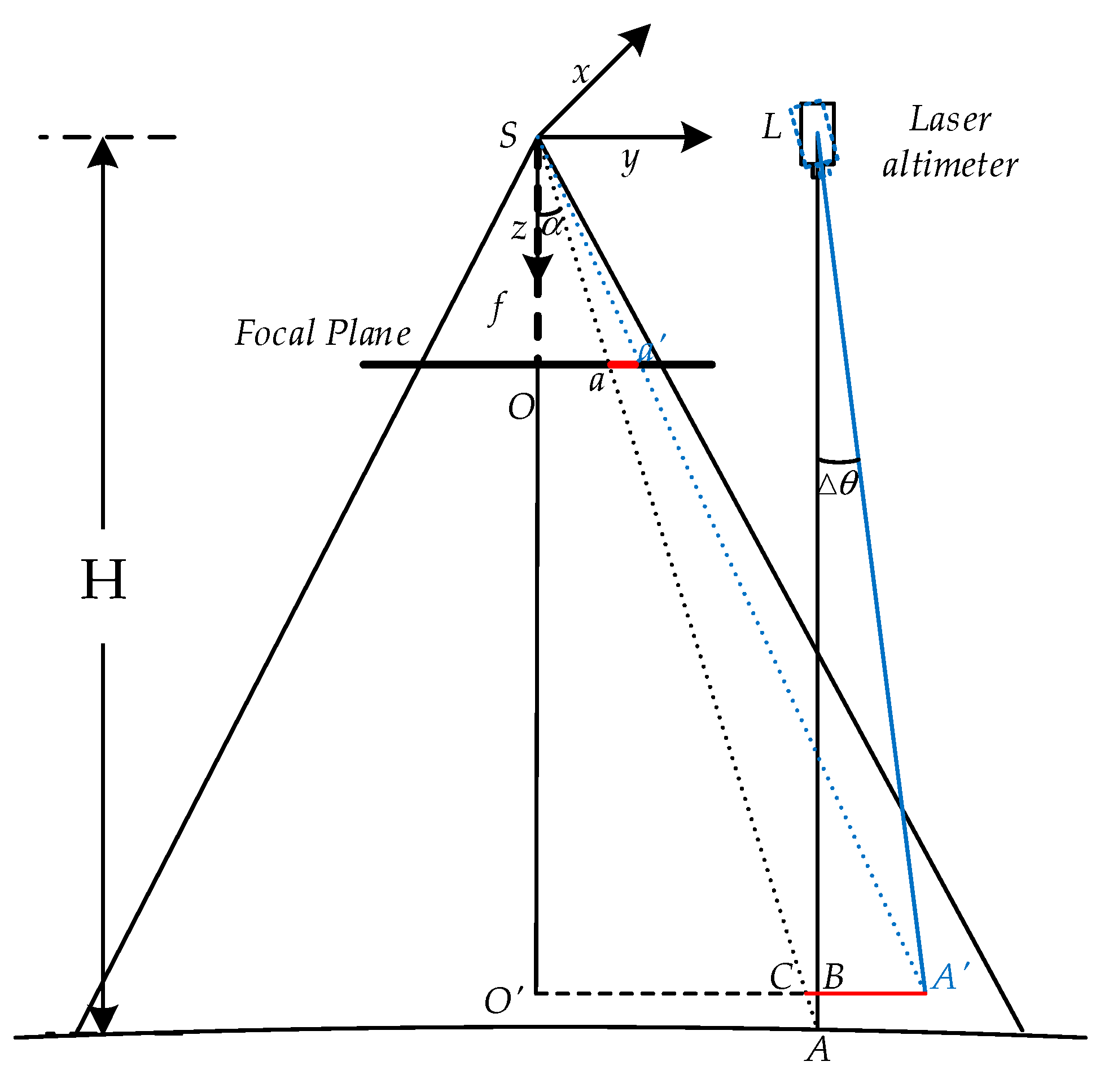
Figure 12 shows the elevation error analysis schematic.
S is the projected center of the NAD camera. The thick solid line represents the focal plane, and SO is the focal length f. The black laser altimeter represents an ideal situation, that it simultaneously works with the NAD camera, while the blue represents the real situation due to some unfavorable factors such as changes in the thermal environment and attitude stability, in which there exists a small deviation angle between the true and real pointing angles that ultimately may change and cause variations in the relative geometric relation of the NAD camera. To simplify the analysis, suppose there is only along the axis y. Here, only consider the factors outside the laser altimeter, so the difference of measured range between the ideal and true is zero. Laser point A projects to the NAD image at a, and laser point A’ projects to the NAD image at a’. The view angle of image point a in the image coordinate is a. The relative location of LAP in relation to the image can result in different view angles . Thus, aa’ is the projection error resulting from the capture time interval.
To calculate
aa’, we draw a line over
A’ parallel to
aa’, which intersects
LA at
B, and
SA at
C. Then, the projection error
aa’ can be calculated by:
Taking the derivative of Equation (19) with respect to, the derivative of
aa’ is:
Since the value of is always greater than 0, aa’ is a monotonically increasing function about variable . Thus, the maximum value of at the end pixel of NAD camera image, aa’ is the
maximum projection error.
Taking the derivative of Equation (19) with respect to
, the derivative of
aa’ is:
Since the value of is also always greater than 0, is a monotonically increasing function about variable .
For the ZY3-02 satellite, f is 1.7 m, the NAD image pixel size is 7 µm, and the minimum and maximum view angles are 0° and 2.94°, respectively. Because the interval time is 5 days, suppose the maximum deviation is
within such a short interval. According to the calculation results, the value of aa’ is approximately 5.88 pixels in the image (12.35 m in ground space), whatever minimum or maximum view angle is used, which demonstrates that the combined adjustment results are insensitive to the location of the LAP in relation to the stereo images. Moreover, all of the LAPs engaged in the experiment were selected at the plain area with slopes of less than 2°. The 12.35 m deviation in the planimetric space will bring about a maximum 0.43 m error in the vertical direction when the slope is 2°. Overall, the error is relatively small compared with the original height accuracy acquired from stereo images of the ZY3-02 satellite. To eliminate the errors caused by capture time interval, the NAD image and laser altimeter data that are captured simultaneously remain the best choice to use for experiments.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}