Sub-Pixel Waterline Extraction: Characterising Accuracy and Sensitivity to Indices and Spectra


Abstract
:
1. Introduction
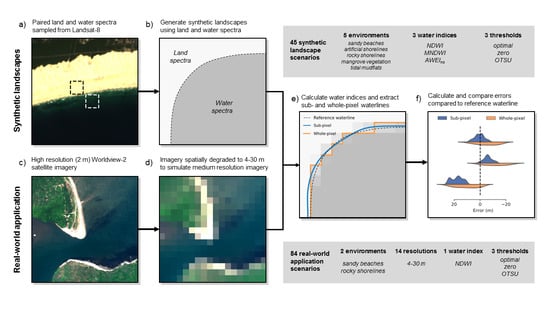
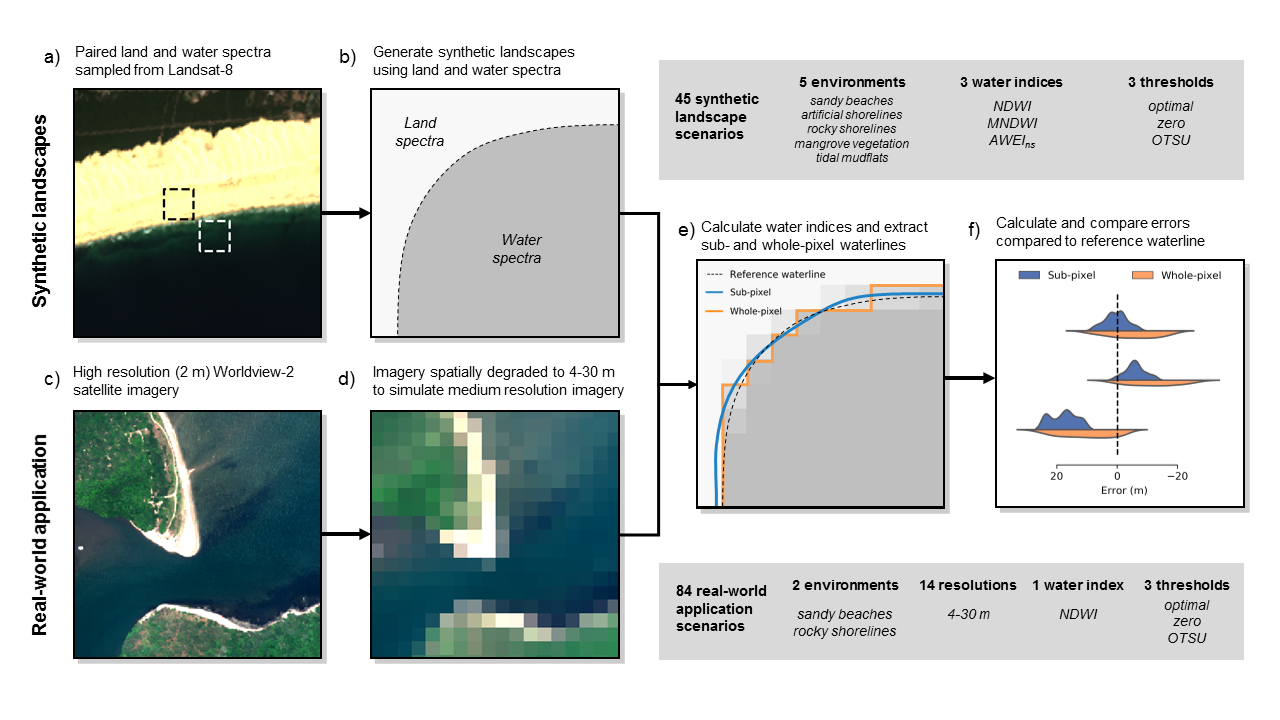
2. Materials and Methods
2.1. Influence of Environment on Waterline Extraction Performance
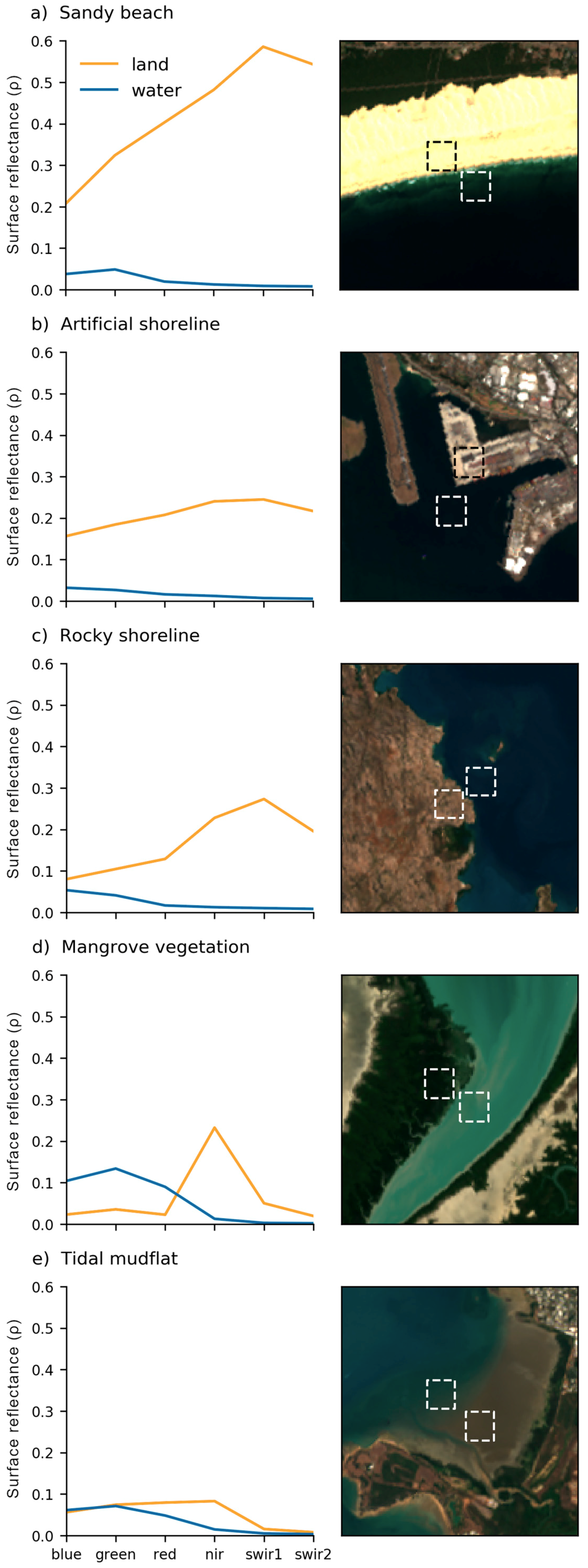
2.1.1. Sample Spectra and Index Calculation
2.1.2. Waterline Extraction
2.1.3. Statistical Comparison
2.2. Real-World Application Using WorldView-2
3. Results and Discussion
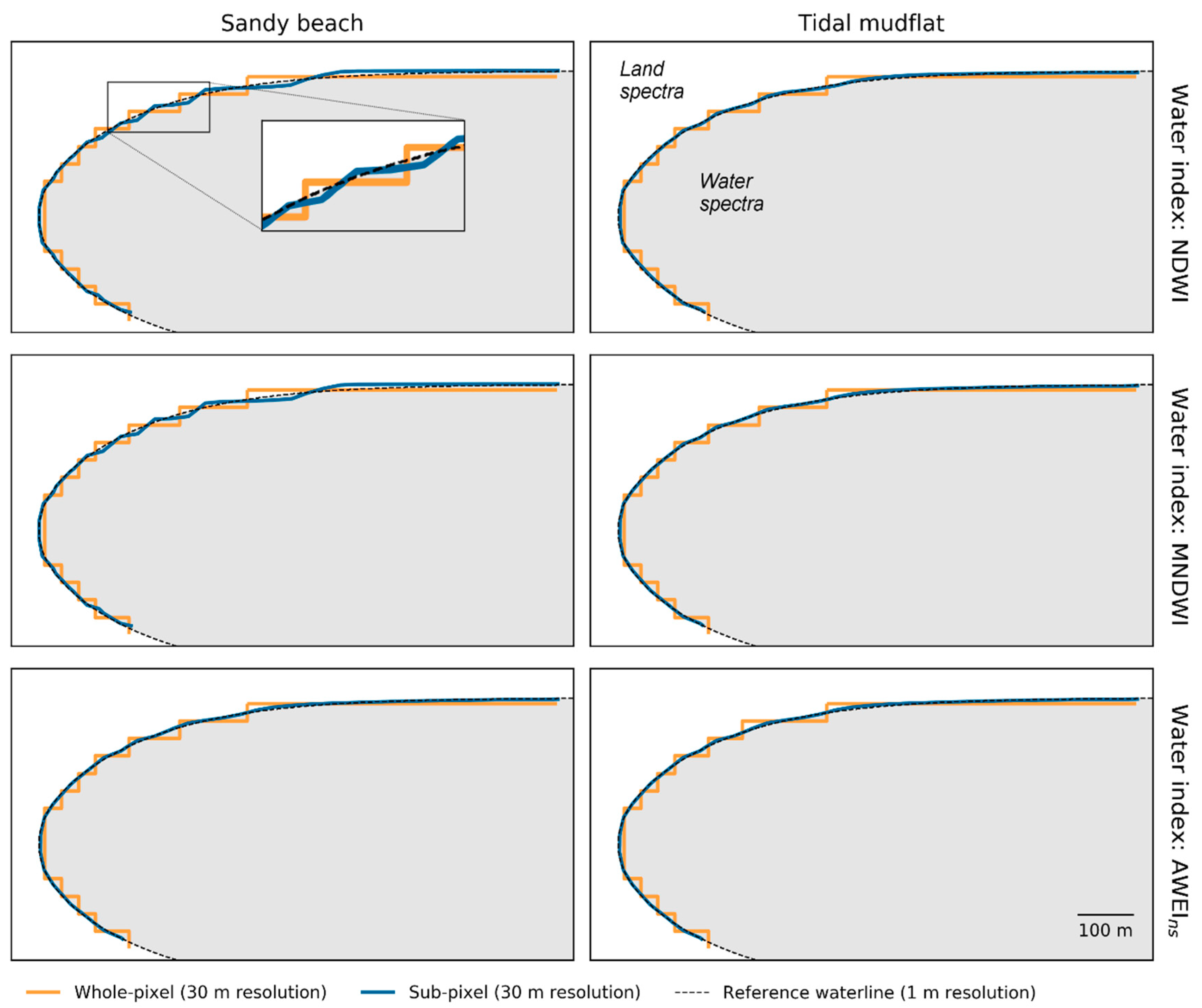
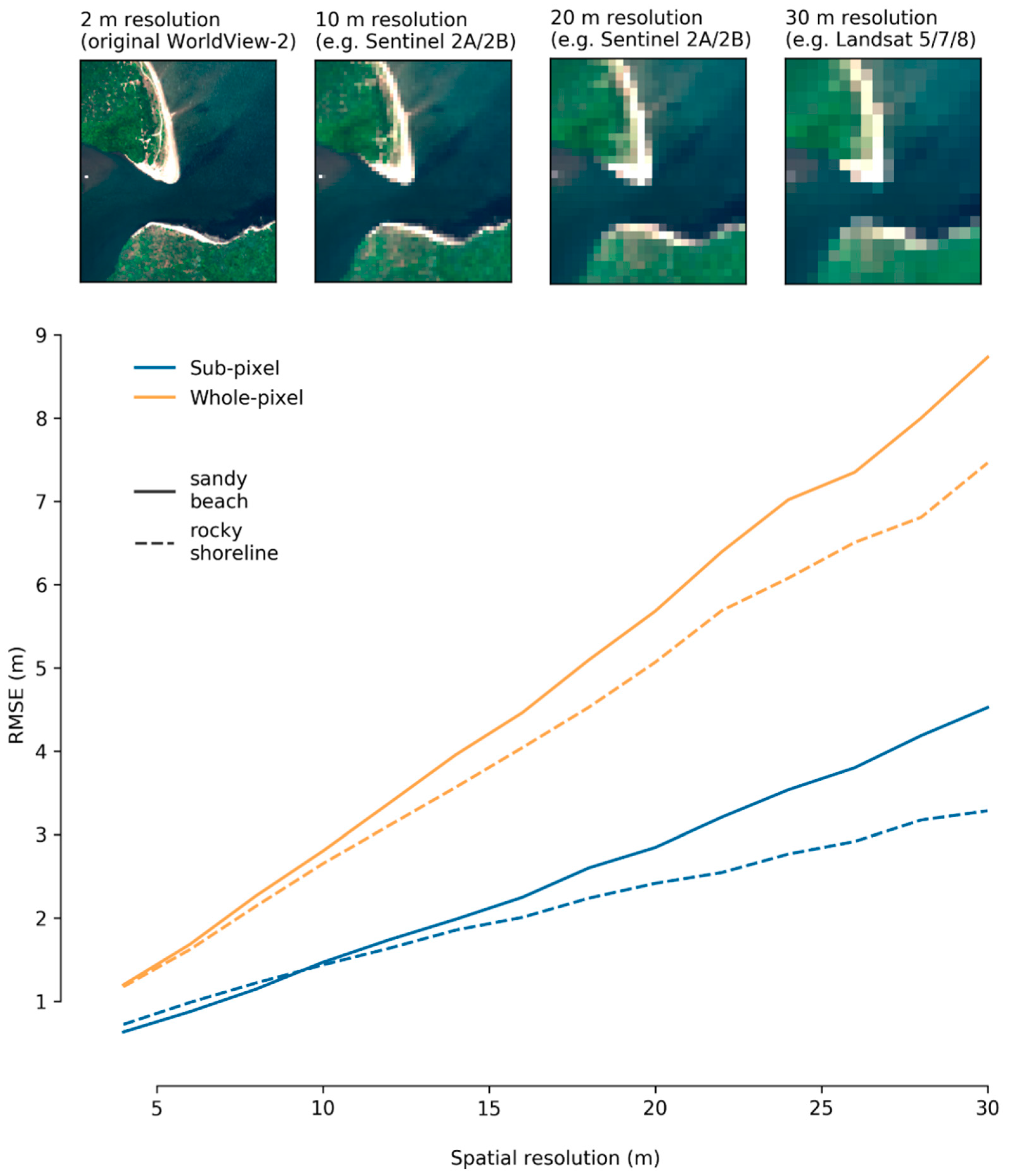
3.1. Sub-Pixel Waterline Extraction Performance
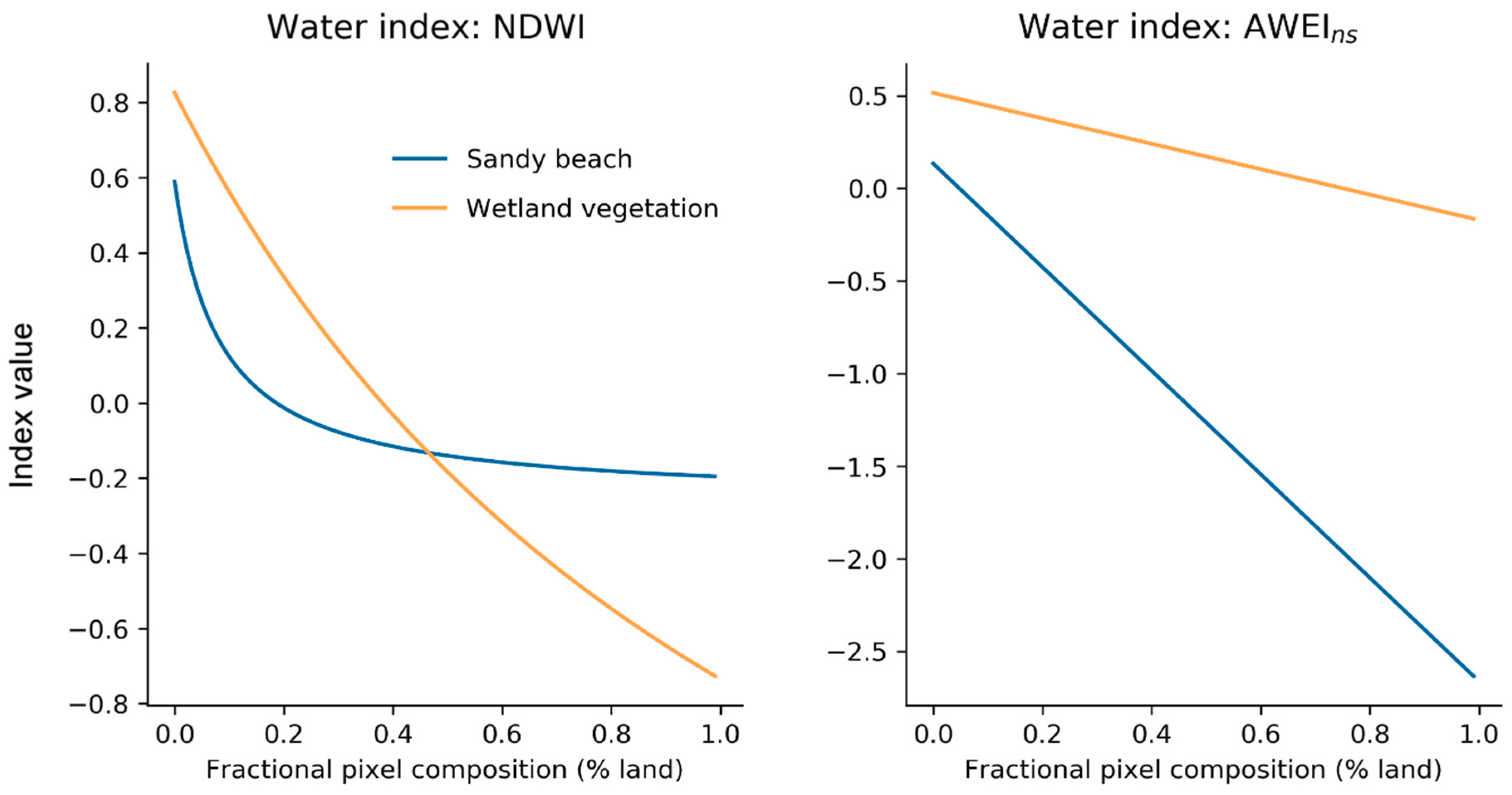
3.2. Effect of Spectra and Water Index
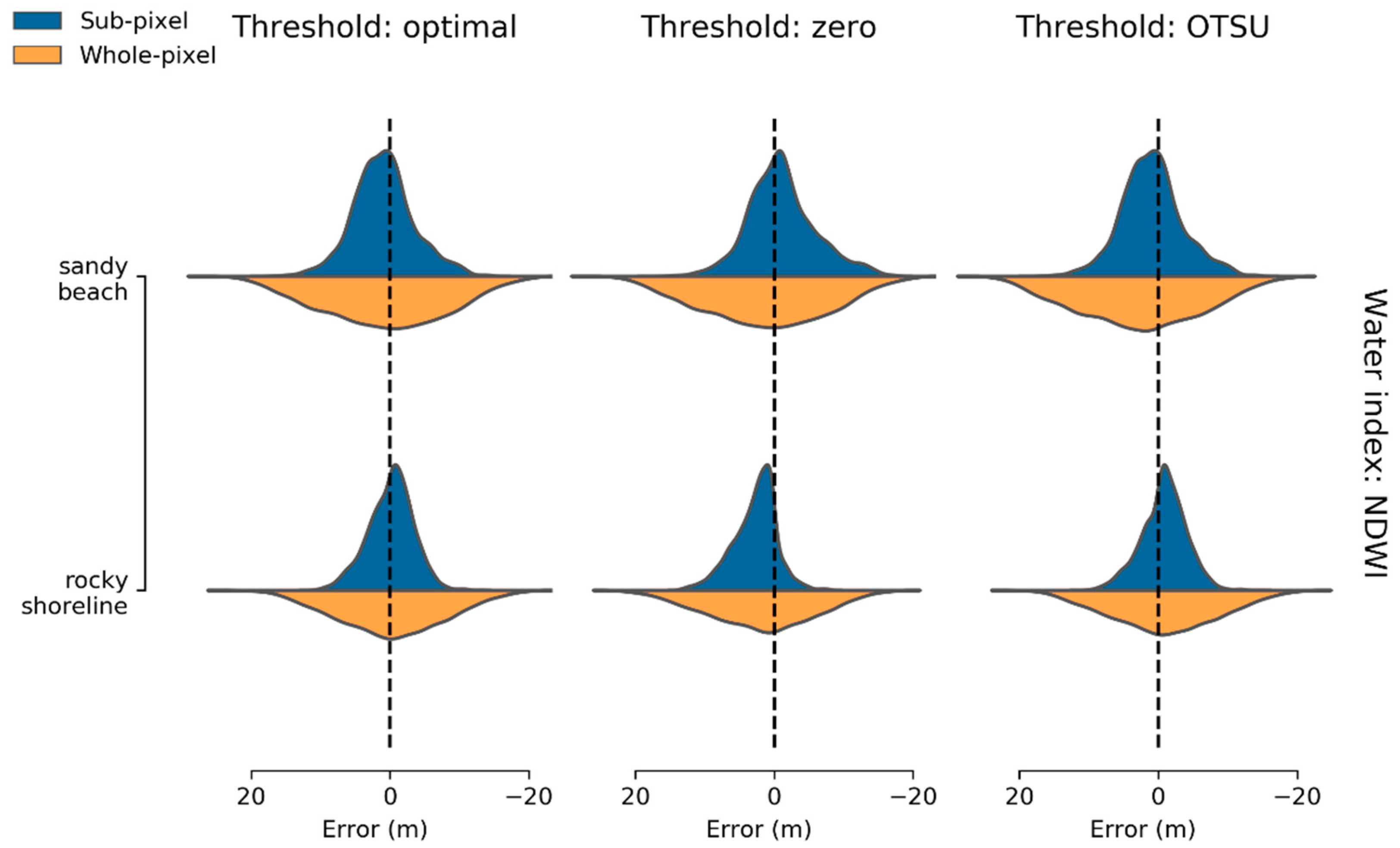
3.3. Effect of Water Index Threshold
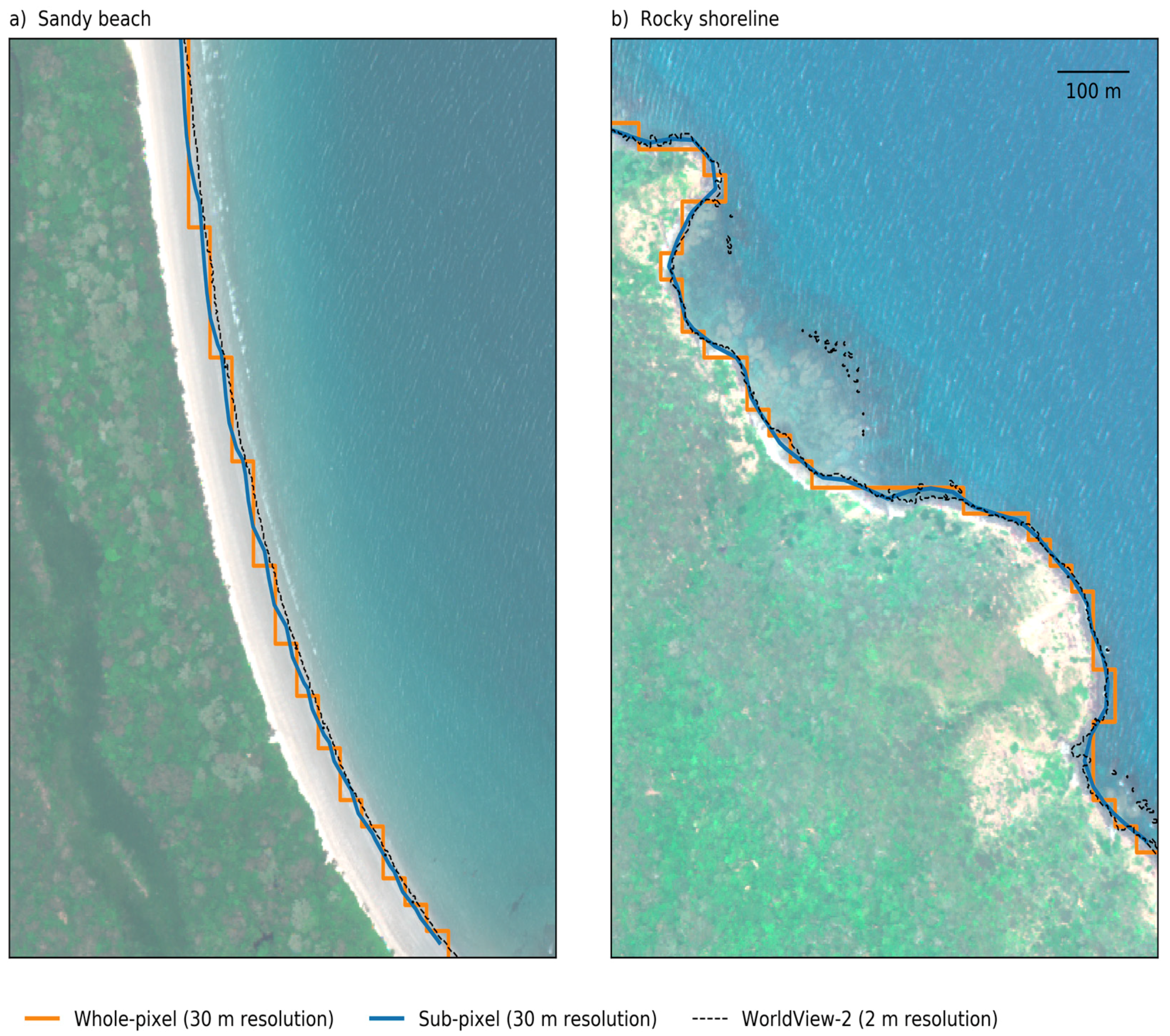
3.4. Real-World Application
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (m) | Standard Deviation (m) | |||||
|---|---|---|---|---|---|---|
| Environment | Spatial Resolution (m) | Threshold | Sub-pixel | Whole-pixel | Sub-pixel | Whole-pixel |
| Rocky shoreline | 4 | Optimal | 0.72 | 1.17 | 0.72 | 1.15 |
| Zero | 0.72 | 1.19 | 0.72 | 1.19 | ||
| Otsu | 2.10 | 2.50 | 1.72 | 2.24 | ||
| Rocky shoreline | 10 | Optimal | 1.43 | 2.65 | 1.43 | 2.65 |
| Zero | 1.43 | 2.66 | 1.43 | 2.65 | ||
| Otsu | 2.44 | 3.36 | 1.66 | 3.01 | ||
| Rocky shoreline | 20 | Optimal | 2.41 | 5.07 | 2.41 | 5.07 |
| Zero | 2.52 | 5.14 | 2.35 | 5.06 | ||
| Otsu | 3.20 | 5.58 | 2.49 | 5.27 | ||
| Rocky shoreline | 30 | Optimal | 3.28 | 7.46 | 3.27 | 7.46 |
| Zero | 4.23 | 7.68 | 3.16 | 7.44 | ||
| Otsu | 3.36 | 7.54 | 3.26 | 7.48 | ||
| Sandy beach | 4 | Optimal | 0.63 | 1.19 | 0.63 | 1.17 |
| Zero | 0.63 | 1.25 | 0.63 | 1.25 | ||
| Otsu | 2.17 | 1.81 | 1.80 | 1.43 | ||
| Sandy beach | 10 | Optimal | 1.47 | 2.80 | 1.47 | 2.79 |
| Zero | 1.56 | 2.80 | 1.51 | 2.79 | ||
| Otsu | 2.38 | 3.23 | 1.92 | 2.82 | ||
| Sandy beach | 20 | Optimal | 2.84 | 5.68 | 2.84 | 5.67 |
| Zero | 3.19 | 5.69 | 3.05 | 5.65 | ||
| Otsu | 2.96 | 5.96 | 2.84 | 5.67 | ||
| Sandy beach | 30 | Optimal | 4.52 | 8.73 | 4.42 | 8.70 |
| Zero | 5.00 | 8.79 | 4.89 | 8.70 | ||
| Otsu | 4.52 | 9.09 | 4.42 | 8.66 | ||
References
- Kelly, J.T.; Gontz, A.M. Using GPS-surveyed intertidal zones to determine the validity of shorelines automatically mapped by Landsat water indices. Int. J. Appl. Earth Obs. Geoinf. 2018, 65, 92–104. [Google Scholar] [CrossRef]
- Kopp, S.; Becker, P.; Doshi, A.; Wright, D.J.; Zhang, K.; Xu, H. Achieving the Full Vision of Earth Observation Data Cubes. Data 2019, 4, 94. [Google Scholar] [CrossRef] [Green Version]
- Dhu, T.; Dunn, B.; Lewis, B.; Lymburner, L.; Mueller, N.; Telfer, E.; Lewis, A.; McIntyre, A.; Minchin, S.; Phillips, C. Digital earth Australia—Unlocking new value from earth observation data. Big Earth Data 2017, 1, 64–74. [Google Scholar] [CrossRef] [Green Version]
- Lewis, A.; Oliver, S.; Lymburner, L.; Evans, B.; Wyborn, L.; Mueller, N.; Raevksi, G.; Hooke, J.; Woodcock, R.; Sixsmith, J.; et al. The Australian Geoscience Data Cube—Foundations and lessons learned. Remote Sens. Environ. 2017, 202, 276–292. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Luijendijk, A.; Hagenaars, G.; Ranasinghe, R.; Baart, F.; Donchyts, G.; Aarninkhof, S. The state of the world’s beaches. Sci. Rep. 2018, 8, 6641. [Google Scholar] [CrossRef]
- Sagar, S.; Roberts, D.; Bala, B.; Lymburner, L. Extracting the intertidal extent and topography of the Australian coastline from a 28 year time series of Landsat observations. Remote Sens. Environ. 2017, 195, 153–169. [Google Scholar] [CrossRef]
- Murray, N.J.; Phinn, S.R.; DeWitt, M.; Ferrari, R.; Johnston, R.; Lyons, M.B.; Clinton, N.; Thau, D.; Fuller, R.A. The global distribution and trajectory of tidal flats. Nature 2019, 565, 222–225. [Google Scholar] [CrossRef]
- Lymburner, L.; Bunting, P.; Lucas, R.; Scarth, P.; Alam, I.; Phillips, C.; Ticehurst, C.; Held, A. Mapping the multi-decadal mangrove dynamics of the Australian coastline. Remote Sens. Environ. 2019. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Sagar, S.; Lymburner, L.; Beaman, R.J. Between the tides: Modelling the elevation of Australia’s exposed intertidal zone at continental scale. Estuar. Coast. Shelf Sci. 2019, 23, 115–128. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Lymburner, L.; McIntyre, A.; Tan, P.; Curnow, S.; et al. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418. [Google Scholar] [CrossRef]
- Vousdoukas, M.I.; Almeida, L.P.M.; Ferreira, Ó. Beach erosion and recovery during consecutive storms at a steep-sloping, meso-tidal beach. Earth Surf. Process. Landf. 2012, 37, 583–593. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef] [Green Version]
- Almeida, L.P.; Almar, R.; Bergsma, E.W.J.; Berthier, E.; Baptista, P.; Garel, E.; Dada, O.A.; Alves, B. Deriving High Spatial-Resolution Coastal Topography From Sub-meter Satellite Stereo Imagery. Remote Sens. 2019, 11, 590. [Google Scholar] [CrossRef] [Green Version]
- Ogilvie, A.; Belaud, G.; Massuel, S.; Mulligan, M.; Le Goulven, P.; Calvez, R. Surface water monitoring in small water bodies: potential and limits of multi-sensor Landsat time series. Hydrol. Earth Syst. Sci. 2018, 22, 4349. [Google Scholar] [CrossRef] [Green Version]
- Pereira, B.; Medeiros, P.; Francke, T.; Ramalho, G.; Foerster, S.; Araújo, J.C.D. Assessment of the geometry and volumes of small surface water reservoirs by remote sensing in a semi-arid region with high reservoir density. Hydrol. Sci. J. 2019, 64, 66–79. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M.; Stehman, S.V.; Kommareddy, A. Surface water extent dynamics from three decades of seasonally continuous Landsat time series at subcontinental scale in a semi-arid region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar] [CrossRef]
- Ryu, J.-H.; Won, J.-S.; Min, K.D. Waterline extraction from Landsat TM data in a tidal flat: A case study in Gomso Bay, Korea. Remote Sens. Environ. 2002, 83, 442–456. [Google Scholar] [CrossRef]
- Ryu, J.-H.; Kim, C.-H.; Lee, Y.-K.; Won, J.-S.; Chun, S.-S.; Lee, S. Detecting the intertidal morphologic change using satellite data. Estuar. Coast. Shelf Sci. 2008, 78, 623–632. [Google Scholar] [CrossRef]
- Park, W.; Lee, Y.-K.; Shin, J.-S.; Won, J.-S. A tidal correction model for near-infrared (NIR) reflectance over tidal flats. Remote Sens. Lett. 2013, 4, 833–842. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Bai, J.; Chen, X.; Li, J.; Yang, L.; Fang, H. Changes in the area of inland lakes in arid regions of central Asia during the past 30 years. Environ. Monit. Assess. 2011, 178, 247–256. [Google Scholar] [CrossRef] [PubMed]
- Muala, E.; Mohamed, Y.; Duan, Z.; van der Zaag, P. Estimation of reservoir discharges from Lake Nasser and Roseires Reservoir in the Nile Basin using satellite altimetry and imagery data. Remote Sens. 2014, 6, 7522–7545. [Google Scholar] [CrossRef] [Green Version]
- Rokni, K.; Ahmad, A.; Selamat, A.; Hazini, S. Water Feature Extraction and Change Detection Using Multitemporal Landsat Imagery. Remote Sens. 2014, 6, 4173–4189. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Lu, X. Drastic change in China’s lakes and reservoirs over the past decades. Sci. Rep. 2014, 4, 6041. [Google Scholar] [CrossRef] [Green Version]
- Schwatke, C.; Scherer, D.; Dettmering, D. Automated Extraction of Consistent Time-Variable Water Surfaces of Lakes and Reservoirs Based on Landsat and Sentinel-2. Remote Sens. 2019, 11, 1010. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Trinder, J.C. Sub-pixel technique for time series analysis of shoreline changes based on multispectral satellite imagery. In Advanced Remote Sens. Technology for Synthetic Aperture Radar Applications, Tsunami Disasters, and Infrastructure; IntechOpen: London, UK, 2018. [Google Scholar]
- Dai, C.; Howat, I.M.; Larour, E.; Husby, E. Coastline extraction from repeat high resolution satellite imagery. Remote Sens. Environ. 2019, 229, 260–270. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Schill, S.R.; Roelfsema, C.; Phinn, S.; Silman, M.; Mascaro, J.; Asner, G.P. Adaptive bathymetry estimation for shallow coastal waters using Planet Dove satellites. Remote Sens. Environ. 2019, 232. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free access to Landsat imagery. Science 2008, 320, 1011. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Ruiz, L.A.; Palomar-Vázquez, J. Automatic extraction of shorelines from Landsat TM and ETM+ multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Pardo-Pascual, J.E.; Sánchez-García, E.; Almonacid-Caballer, J.; Palomar-Vázquez, J.M.; Priego de los Santos, E.; Fernández-Sarría, A.; Balaguer-Beser, Á. Assessing the accuracy of automatically extracted shorelines on microtidal beaches from Landsat 7, Landsat 8 and Sentinel-2 imagery. Remote Sens. 2018, 10, 326. [Google Scholar] [CrossRef] [Green Version]
- Almonacid-Caballer, J.; Sánchez-García, E.; Pardo-Pascual, J.E.; Balaguer-Beser, A.A.; Palomar-Vázquez, J. Evaluation of annual mean shoreline position deduced from Landsat imagery as a mid-term coastal evolution indicator. Mar. Geol. 2016, 372, 79–88. [Google Scholar] [CrossRef]
- Foody, G.M.; Muslim, A.M.; Atkinson, P.M. Super-resolution mapping of the shoreline through soft classification analyses. In Proceedings of the IGARSS 2003, 2003 IEEE International Geoscience and Remote Sens. Symposium. Proceedings (IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; Volume 6, pp. 3429–3431. [Google Scholar]
- Foody, G.M.; Muslim, A.M.; Atkinson, P.M. Super-resolution mapping of the waterline from remotely sensed data. Int. J. Remote Sens. 2005, 26, 5381–5392. [Google Scholar] [CrossRef]
- Muslim, A.M.; Foody, G.M.; Atkinson, P.M. Shoreline Mapping from Coarse-Spatial Resolution Remote Sens. Imagery of Seberang Takir, Malaysia. J. Coast. Res. 2007, 23, 1399–1408. [Google Scholar] [CrossRef]
- Liu, Q.; Trinder, J.C.; Turner, I.L. Automatic super-resolution shoreline change monitoring using Landsat archival data: A case study at Narrabeen–Collaroy Beach, Australia. J. Appl. Remote Sens. 2017, 11. [Google Scholar] [CrossRef]
- Vos, K.; Harley, M.D.; Splinter, K.D.; Simmons, J.A.; Turner, I.L. Sub-annual to multi-decadal shoreline variability from publicly available satellite imagery. Coast. Eng. 2019, 150, 160–174. [Google Scholar] [CrossRef]
- Liu, X.; Deng, R.; Xu, J.; Zhang, F. Coupling the modified linear spectral mixture analysis and pixel-swapping methods for improving subpixel water mapping: Application to the Pearl River Delta, China. Water 2017, 9, 658. [Google Scholar] [CrossRef] [Green Version]
- Niroumand-Jadidi, M.; Vitti, A. Reconstruction of river boundaries at sub-pixel resolution: estimation and spatial allocation of water fractions. ISPRS Int. J. Geo Inf. 2017, 6, 383. [Google Scholar] [CrossRef] [Green Version]
- Hagenaars, G.; de Vries, S.; Luijendijk, A.P.; de Boer, W.P.; Reniers, A.J. On the accuracy of automated shoreline detection derived from satellite imagery: A case study of the Sand Motor mega-scale nourishment. Coast. Eng. 2018, 133, 113–125. [Google Scholar] [CrossRef]
- Moreno, L.J.; Kraus, N.C. Equilibrium shape of headland-bay beaches for engineering design. Proc. Coastal Sediments 1999, 860–875. [Google Scholar]
- Li, F.; Jupp, D.L.; Thankappan, M.; Lymburner, L.; Mueller, N.; Lewis, A.; Held, A. A physics-based atmospheric and BRDF correction for Landsat data over mountainous terrain. Remote Sens. Environ. 2012, 124, 756–770. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Y.; Ling, F.; Xu, S. Fine spatial resolution coastline extraction from Landsat-8 OLI imagery by integrating downscaling and pansharpening approaches. Remote Sens. Lett. 2018, 9, 314–323. [Google Scholar] [CrossRef]
- Souza Filho, P.W.M.; Farias Martins, E.D.S.; da Costa, F.R. Using mangroves as a geological indicator of coastal changes in the Bragança macrotidal flat, Brazilian Amazon: A remote sensing data approach. Ocean Coast. Manag. 2006, 49, 462–475. [Google Scholar] [CrossRef]
- Nguyen, H.-H.; McAlpine, C.; Pullar, D.; Johansen, K.; Duke, N.C. The relationship of spatial–temporal changes in fringe mangrove extent and adjacent land-use: Case study of Kien Giang coast, Vietnam. Ocean Coast. Manag. 2013, 76, 12–22. [Google Scholar] [CrossRef]
- Nardin, W.; Locatelli, S.; Pasquarella, V.; Rulli, M.C.; Woodcock, C.E.; Fagherazzi, S. Dynamics of a fringe mangrove forest detected by Landsat images in the Mekong River Delta, Vietnam. Earth Surf. Process. Landf. 2016, 41, 2024–2037. [Google Scholar] [CrossRef]
- Zhao, B.; Guo, H.; Yan, Y.; Wang, Q.; Li, B. A simple waterline approach for tidelands using multi-temporal satellite images: A case study in the Yangtze Delta. Estuar. Coast. Shelf Sci. 2008, 77, 134–142. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Murray, N.J.; Phinn, S.R.; Clemens, R.S.; Roelfsema, C.M.; Fuller, R.A. Continental scale mapping of tidal flats across East Asia using the Landsat archive. Remote Sens. 2012, 4, 3417–3426. [Google Scholar] [CrossRef] [Green Version]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Cipolletti, M.P.; Delrieux, C.A.; Perillo, G.M.; Piccolo, M.C. Superresolution border segmentation and measurement in remote sensing images. Comput. Geosci. 2012, 40, 87–96. [Google Scholar] [CrossRef]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Gilles, S. Shapely: Manipulation and Analysis of Geometric Objects. Available online: https://toblerity.org (accessed on 10 December 2019).
- Hoyer, S.; Hamman, J. xarray: ND labeled arrays and datasets in Python. J. Open Res. Software 2017, 5. [Google Scholar] [CrossRef] [Green Version]
- Van Der Walt, S.; Colbert, S.C.; Varoquaux, G. The NumPy array: A structure for efficient numerical computation. Comput. Sci. Eng. 2011, 13, 22. [Google Scholar] [CrossRef] [Green Version]
- Jones, E.; Oliphant, T.; Peterson, P. {SciPy}: Open Source Scientific Tools for Python. Available online: http://www.scipy.org/ (accessed on 10 December).
- McKinney, W. Data structures for statistical computing in Python. In Proceedings of the 9th Python in Science Conference (SciPy 2010), Austin, TX, USA, 28 June–3 July 2010; Volume 445, pp. 51–56. [Google Scholar]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90. [Google Scholar] [CrossRef]
- Waskom, M. Seaborn: Statistical Data Visualization using Matplotlib. Available online: https://seaborn.pydata.org (accessed on 10 December).
- Zhou, Y.; Dong, J.; Xiao, X.; Xiao, T.; Yang, Z.; Zhao, G.; Zou, Z.; Qin, Y. Open surface water mapping algorithms: A comparison of water-related spectral indices and sensors. Water 2017, 9, 256. [Google Scholar] [CrossRef]
- Kelly, J.T.; McSweeney, S.; Shulmeister, J.; Gontz, A.M. Bimodal climate control of shoreline change influenced by Interdecadal Pacific Oscillation variability along the Cooloola Sand Mass, Queensland, Australia. Mar. Geol. 2019, 415, 105971. [Google Scholar] [CrossRef]
- Rover, J.; Wylie, B.K.; Ji, L. A self-trained classification technique for producing 30 m percent-water maps from Landsat data. Int. J. Remote Sens. 2010, 31, 2197–2203. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Automated subpixel surface water mapping from heterogeneous urban environments using Landsat 8 OLI imagery. Remote Sens. 2016, 8, 584. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Du, B.; Xiong, S. Quantifying sub-pixel surface water coverage in urban environments using low-albedo fraction from Landsat imagery. Remote Sens. 2017, 9, 428. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-García, E.; Balaguer-Beser, Á.; Almonacid-Caballer, J.; Pardo-Pascual, J.E. A new adaptive image interpolation method to define the shoreline at sub-pixel level. Remote Sens. 2019, 11, 1880. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Liu, F.; Ling, F.; Yue, L. Automatic semi-global artificial shoreline subpixel localization algorithm for Landsat imagery. Remote Sens. 2019, 11, 1779. [Google Scholar] [CrossRef] [Green Version]
- Vos, K.; Splinter, K.D.; Harley, M.D.; Simmons, J.A.; Turner, I.L. CoastSat: A Google Earth Engine-enabled Python toolkit to extract shorelines from publicly available satellite imagery. Environ. Model. Softw. 2019, 122. [Google Scholar] [CrossRef]









| RMSE (m) | Standard Deviation (m) | |||||
|---|---|---|---|---|---|---|
| Spectra | Water Index | Threshold | Sub-pixel | Whole-pixel | Sub-pixel | Whole-pixel |
| Sandy beach | NDWI | Optimal | 3.74 | 8.63 | 3.73 | 7.60 |
| Zero | 4.17 | 12.85 | 3.87 | 8.35 | ||
| Otsu | 10.07 | 14.93 | 4.31 | 8.39 | ||
| MDWI | Optimal | 3.99 | 8.63 | 3.97 | 7.60 | |
| Zero | 5.53 | 14.93 | 4.21 | 8.39 | ||
| Otsu | 9.40 | 16.24 | 4.48 | 8.80 | ||
| AWEIns | Optimal | 1.50 | 8.63 | 1.50 | 7.59 | |
| Zero | 21.60 | 16.94 | 4.37 | 8.94 | ||
| Otsu | 1.58 | 8.63 | 1.49 | 7.60 | ||
| Artificial shoreline | NDWI | Optimal | 3.48 | 8.63 | 3.39 | 7.60 |
| Zero | 3.89 | 12.85 | 3.61 | 8.35 | ||
| Otsu | 5.63 | 14.93 | 3.77 | 8.39 | ||
| MDWI | Optimal | 3.68 | 8.63 | 3.65 | 7.60 | |
| Zero | 3.68 | 9.58 | 3.65 | 8.03 | ||
| Otsu | 10.32 | 14.93 | 4.28 | 8.39 | ||
| AWEIns | Optimal | 1.51 | 8.63 | 1.51 | 7.59 | |
| Zero | 20.39 | 16.24 | 4.06 | 8.80 | ||
| Otsu | 1.53 | 8.70 | 1.50 | 8.27 | ||
| Rocky shoreline | NDWI | Optimal | 2.73 | 8.63 | 2.72 | 7.60 |
| Zero | 5.64 | 12.85 | 2.98 | 8.35 | ||
| Otsu | 7.67 | 14.93 | 3.14 | 8.39 | ||
| MDWI | Optimal | 2.93 | 8.63 | 2.93 | 7.60 | |
| Zero | 6.72 | 14.43 | 3.29 | 8.22 | ||
| Otsu | 7.01 | 14.93 | 3.32 | 8.39 | ||
| AWEIns | Optimal | 1.50 | 8.63 | 1.51 | 7.59 | |
| Zero | 19.79 | 16.24 | 3.90 | 8.80 | ||
| Otsu | 1.57 | 8.63 | 1.49 | 7.60 | ||
| Wetland vegetation | NDWI | Optimal | 1.75 | 8.63 | 1.74 | 7.59 |
| Zero | 3.06 | 8.98 | 1.67 | 7.70 | ||
| Otsu | 4.04 | 8.98 | 1.71 | 7.70 | ||
| MDWI | Optimal | 1.52 | 8.63 | 1.52 | 7.59 | |
| Zero | 18.45 | 13.41 | 4.32 | 8.42 | ||
| Otsu | 2.08 | 9.04 | 1.62 | 9.04 | ||
| AWEIns | Optimal | 1.51 | 8.63 | 1.51 | 7.59 | |
| Zero | 9.02 | 10.05 | 2.04 | 8.85 | ||
| Otsu | 1.56 | 8.70 | 1.49 | 8.27 | ||
| Tidal mudflat | NDWI | Optimal | 1.75 | 8.63 | 1.74 | 7.59 |
| Zero | 17.68 | 13.23 | 3.76 | 8.60 | ||
| Otsu | 4.32 | 9.58 | 1.73 | 8.03 | ||
| MDWI | Optimal | 1.55 | 8.63 | 1.55 | 7.60 | |
| Otsu | 2.22 | 8.98 | 1.53 | 7.70 | ||
| AWEIns | Optimal | 1.51 | 8.70 | 1.51 | 8.27 | |
| Otsu | 1.51 | 8.70 | 1.51 | 8.27 | ||
| RMSE (m) | Standard Deviation (m) | ||||
|---|---|---|---|---|---|
| Environment | Spatial Resolution (m) | Sub-pixel | Whole-pixel | Sub-pixel | Whole-pixel |
| Rocky shoreline | 4 | 0.72 | 1.17 | 0.72 | 1.15 |
| Rocky shoreline | 10 | 1.43 | 2.65 | 1.43 | 2.65 |
| Rocky shoreline | 20 | 2.41 | 5.07 | 2.41 | 5.07 |
| Rocky shoreline | 30 | 3.28 | 7.46 | 3.27 | 7.46 |
| Sandy beach | 4 | 0.63 | 1.19 | 0.63 | 1.17 |
| Sandy beach | 10 | 1.47 | 2.80 | 1.47 | 2.79 |
| Sandy beach | 20 | 2.84 | 5.68 | 2.84 | 5.67 |
| Sandy beach | 30 | 4.52 | 8.73 | 4.42 | 8.70 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bishop-Taylor, R.; Sagar, S.; Lymburner, L.; Alam, I.; Sixsmith, J. Sub-Pixel Waterline Extraction: Characterising Accuracy and Sensitivity to Indices and Spectra. Remote Sens. 2019, 11, 2984. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11242984
Bishop-Taylor R, Sagar S, Lymburner L, Alam I, Sixsmith J. Sub-Pixel Waterline Extraction: Characterising Accuracy and Sensitivity to Indices and Spectra. Remote Sensing. 2019; 11(24):2984. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11242984
Chicago/Turabian StyleBishop-Taylor, Robbi, Stephen Sagar, Leo Lymburner, Imam Alam, and Joshua Sixsmith. 2019. "Sub-Pixel Waterline Extraction: Characterising Accuracy and Sensitivity to Indices and Spectra" Remote Sensing 11, no. 24: 2984. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11242984