A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance


Abstract
:
1. Introduction
2. Review of Terrestrial Laser Scanning for Disturbance Applications
Overview of Methods to Detect Topographic Changes
3. Synthesis of TLS Methods and Development of an Error Analysis Workflow
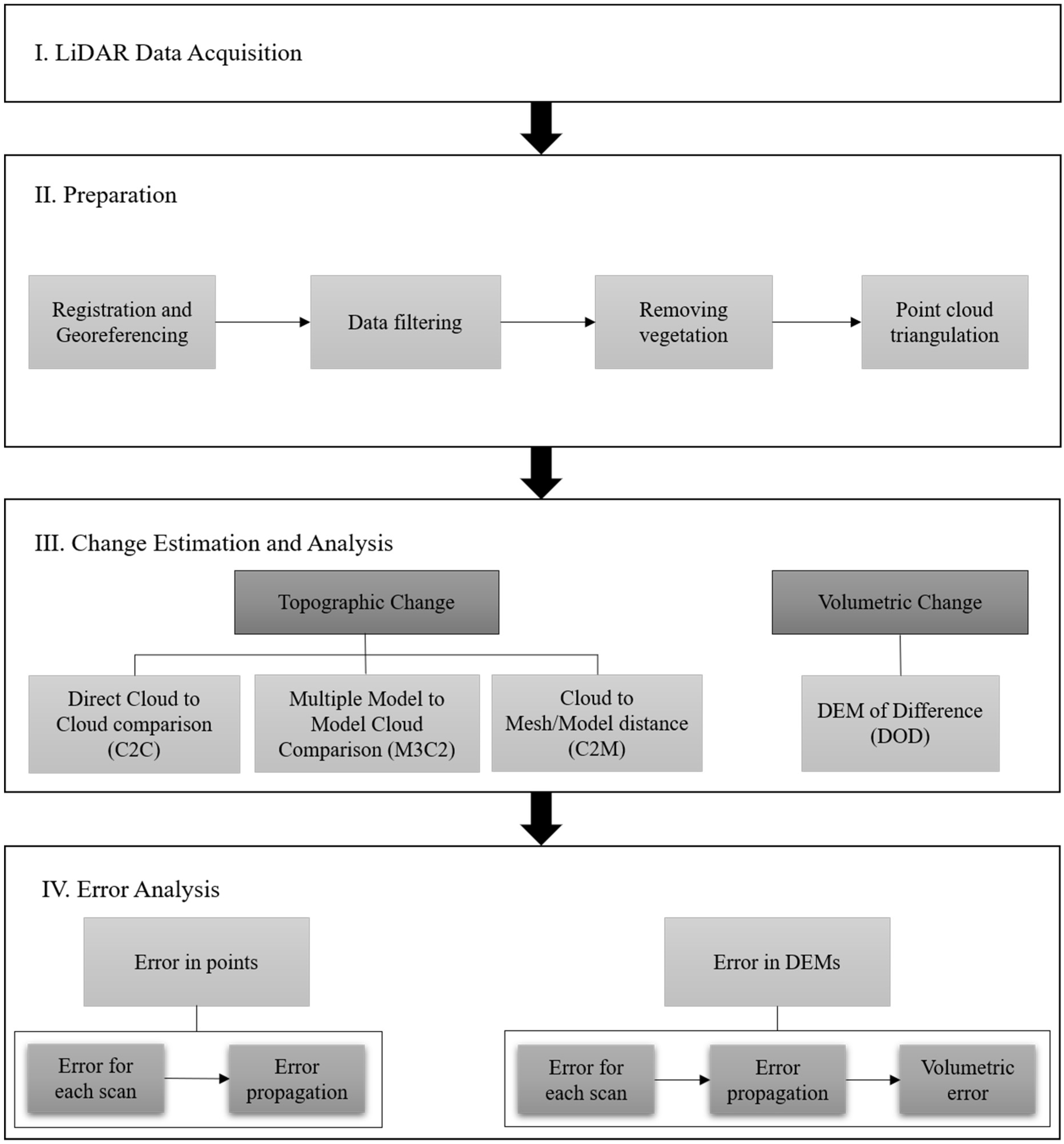
3.1. LiDAR Workflow
3.2. Change Estimation and Analysis
3.3. Error Analysis
3.3.1. Error in Points
3.3.2. Error in DEMs
4. Application of the Developed Workflow
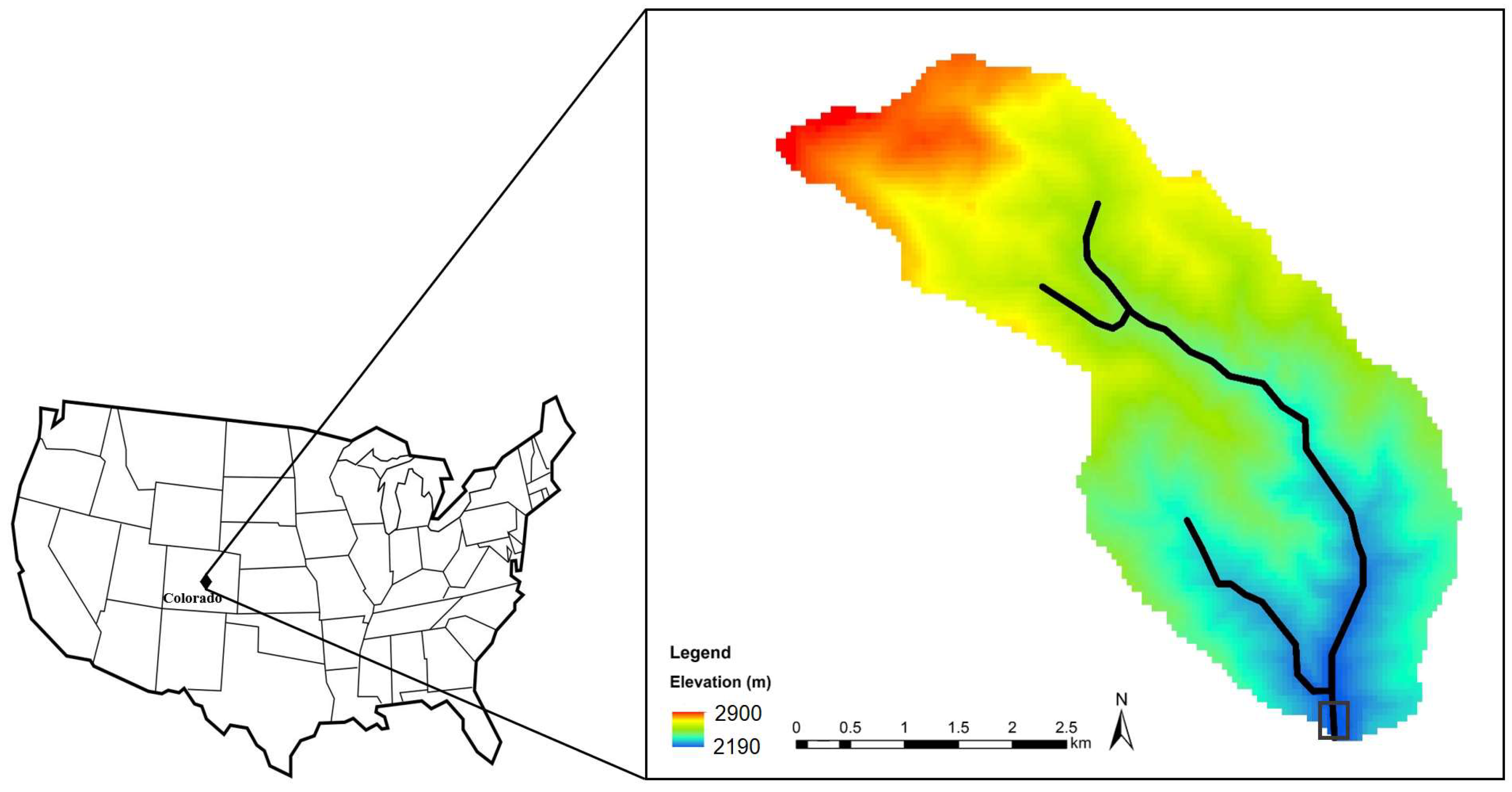
4.1. Background for Test Case Study Area
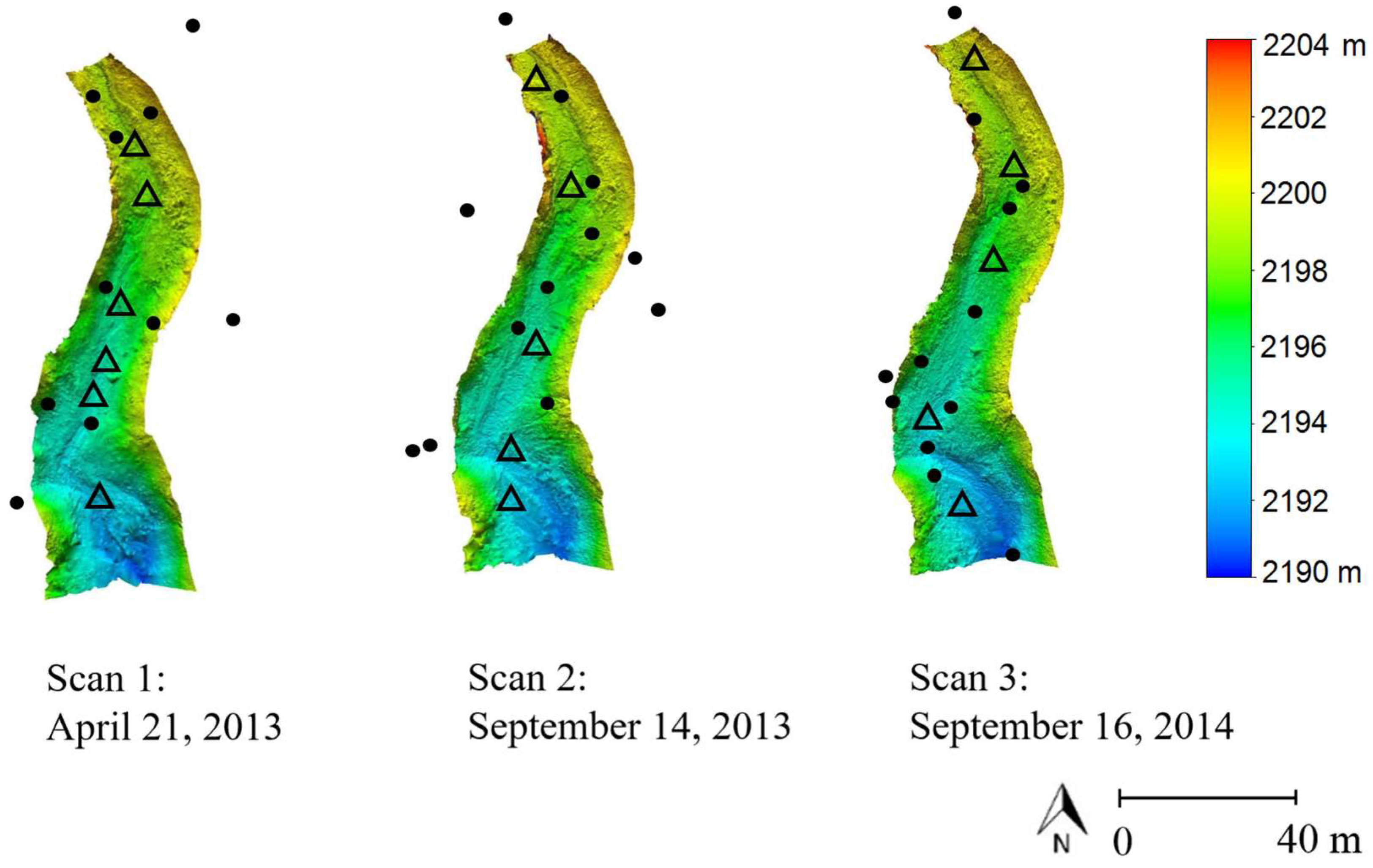
4.2. TLS Data Acquisition
4.3. Data Preparation
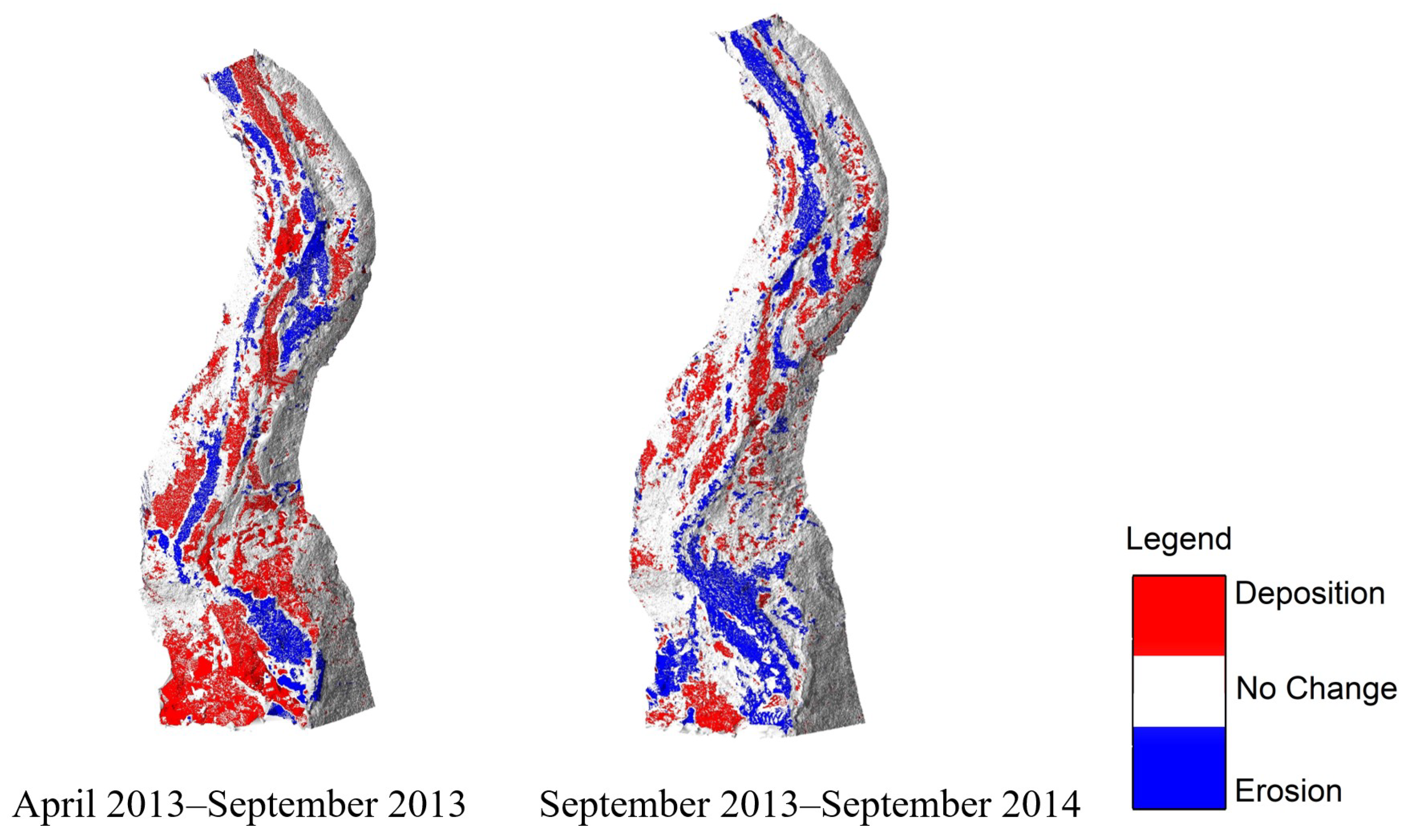
4.4. Change Estimation and Analysis
4.5. Error Analysis
5. Application and Performance of the Workflow Methods in Quantifying Changes and Error
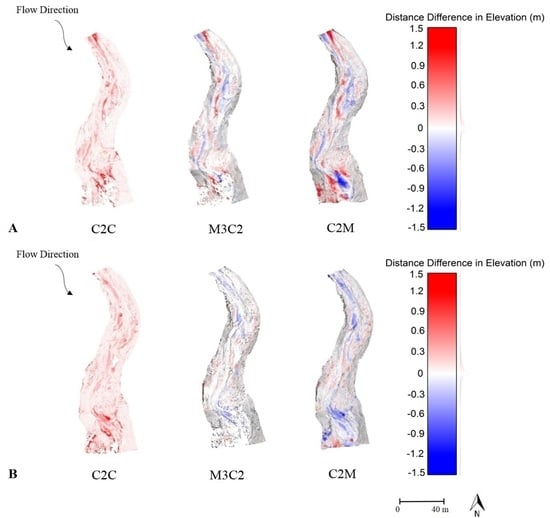
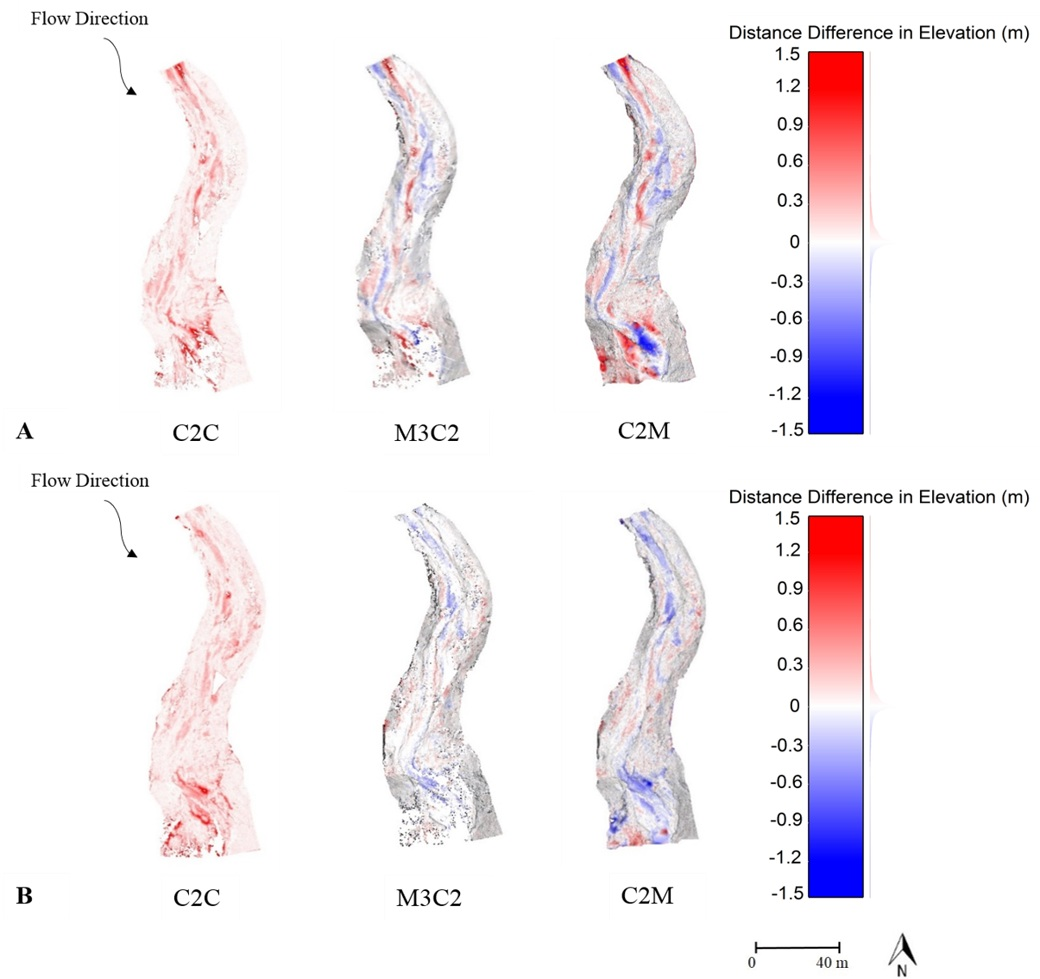
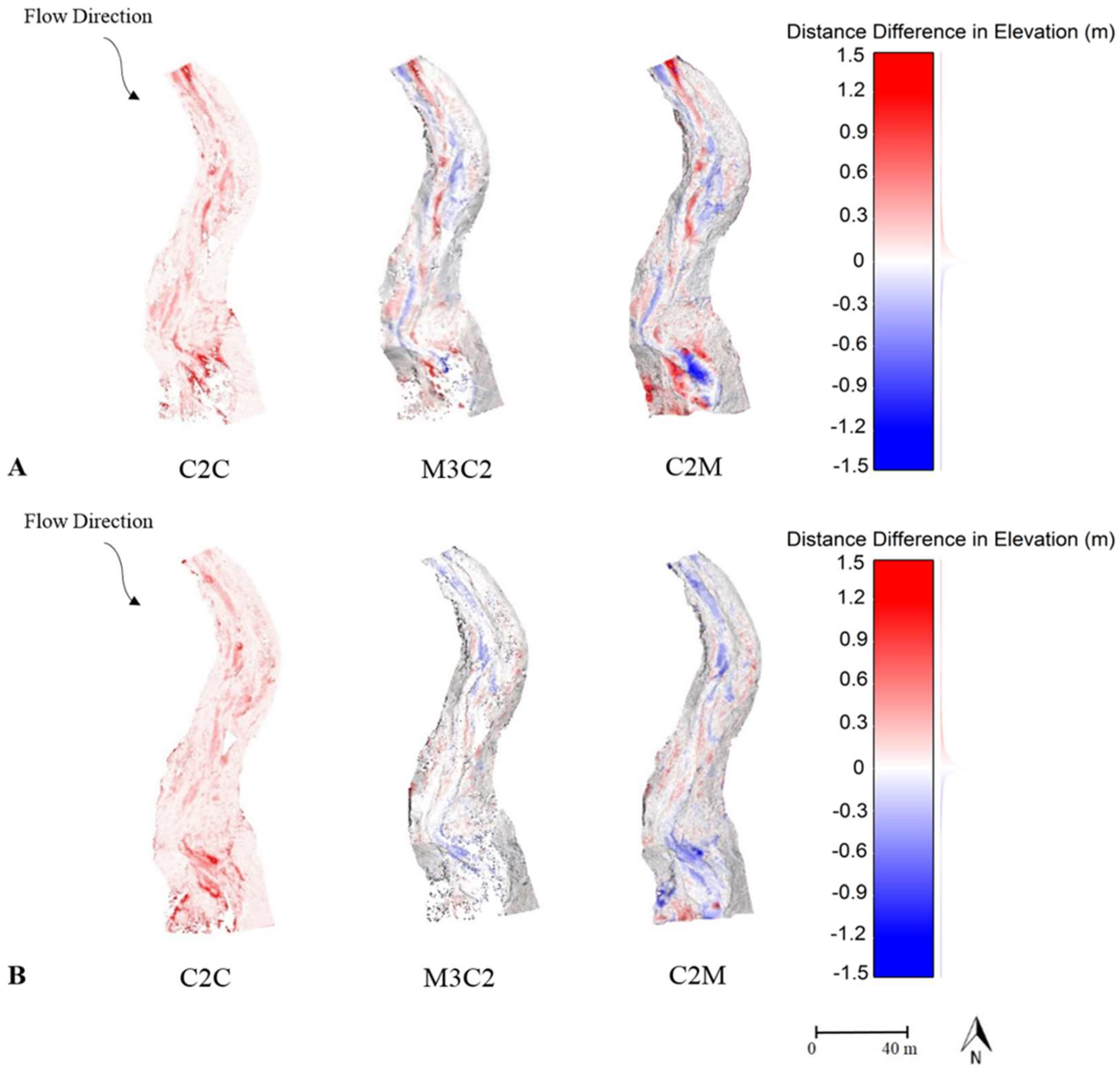
5.1. Comparison of Topographic and Volumetric Change Methods
5.2. Comparison of Errors by Method
5.2.1. Error in Point Clouds
5.2.2. Error Analysis after Triangulation (DEM Error)
5.2.3. Volumetric Error
5.3. Discussion of Errors
6. Conclusions
- The error analysis quantifies a minimum level of detection, which is important for considering the uncertainty in both point clouds and DEMs in TLS processing, analysis results, and conclusions about channel alteration.
- The error analysis demonstrates rapid propagation of error from individual DEMs into DEMs of difference, highlighting the need for consideration. Estimating errors not only for elevation (h), but also in the horizontal directions (x and y) is necessary in point clouds analysis, especially in complex and rugged terrain. However, errors for each single dataset are significantly smaller in point clouds before triangulation (0.003–0.008 m) than in DEMs (0.009–0.014 m) as converting data points within a LiDAR point cloud to DEMs increases the error by interpolation. The propagated error for comparing multiple datasets recording surfaces over time is similar for point clouds (0.015–0.016 m) and DEMs (0.017–0.018 m).
- Approximately 0.030%–0.032% of the estimated erosion and deposition results from errors that exist in the TLS data set, indicating a lower potential for uncertainty for estimating volumetric changes.
- Triangulation of the bare Earth points in the point cloud increases error, especially in complex topography, where occlusions are typically larger than flat surfaces. Therefore, techniques that estimate topographic changes that are solely based on point comparison (i.e., C2C and M3C2) are more reliable than those that interpolate surfaces (i.e., C2M and DOD).
- The C2C method, the absolute distance difference, does not negative and positive values, making data interpretation challenging for studies that are interested in erosion or deposition. In general, C2C compares the closest point to the reference point and provides a simple method for rapid change estimation.
- The M3C2 method extracts erosion and deposition rates from point cloud comparisons and calculates the most accurate and reliable results for the comparison of two surfaces (of the methods reviewed in this work). The M3C2 method does not use interpolation, which minimizes the errors present, especially in complex terrain.
- The C2M and DOD methods are based on triangulated surfaces. The C2M method is recommended to estimate distance difference and provide elevation, whereas the DOD method is recommended for volumetric changes. The DOD estimates are similar to the M3C2 method. The findings of this review and analysis suggest DOD for estimating volumetric changes, and M3C2 for estimating distance differences in elevation in point clouds.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Florsheim, J.L.; Chin, A.; Kinoshita, A.M.; Nourbakhshbeidokhti, S. Effect of storms during drought on post-wildfire recovery of channel sediment dynamics and habitat in the southern California chaparral, USA. Earth Surf. Process. Landf. 2017, 42, 1482–1492. [Google Scholar] [CrossRef]
- Staley, D.M.; Wasklewicz, T.A.; Kean, J.W. Characterizing the primary material sources and dominant erosional processes for post-fire debris-flow initiation in a headwater basin using multi-temporal terrestrial laser scanning data. Geomorphology 2014, 214, 324–338. [Google Scholar] [CrossRef]
- Schmidt, K.M.; Hanshaw, M.N.; Howle, J.F.; Kean, J.W.; Staley, D.M.; Stock, J.D.; Bawden, G.W. Hydrologic conditions and terrestrial laser scanning of post-fire debris flows in the San Gabriel Mountains, CA, USA. In Proceedings of the Fifth International Conference on Debris Flow Hazards Mitigation/Mechanics, Prediction, and Assessment, Padua, Italy, 14–17 June 2011; pp. 583–593. [Google Scholar]
- Pelletier, J.D.; Orem, C.A. How do sediment yields from post-wildfire debris-laden flows depend on terrain slope, soil burn severity class, and drainage basin area? Insights from airborne-LiDAR change detection. Earth Surf. Process. Landf. 2014, 39, 1822–1832. [Google Scholar] [CrossRef]
- Chin, A.; Solverson, A.P.; O’Dowd, A.P.; Florsheim, J.L.; Kinoshita, A.M.; Nourbakhshbeidokhti, S.; Sellers, S.M.; Tyner, L.; Gidley, R. Interacting geomorphic and ecological response of step-pool streams after wildfire. Geol. Soc. Am. Bull. 2019. [Google Scholar] [CrossRef]
- Barnhart, T.B.; Crosby, B.T. Comparing two methods of surface change detection on an evolving thermokarst using high-temporal-frequency terrestrial laser scanning, Selawik River, Alaska. Remote Sens. 2013, 5, 2813–2837. [Google Scholar] [CrossRef]
- Lane, S.N.; Richards, K.S.; Chandler, J.H. Developments in monitoring and modelling small-scale river bed topography. Earth Surf. Process. Landf. 1994, 19, 349–368. [Google Scholar] [CrossRef]
- LANE, S.N. The use of digital terrain modelling in the understanding of dynamic river channel systems. Landf. Monit. Model. Anal. 1998, 311–342. [Google Scholar]
- Heritage, G.L.; Milan, D.J.; Large, A.R.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- Hodge, R.A. Using simulated terrestrial laser scanning to analyze errors in high-resolution scan data of irregular surfaces. ISPRS J. Photogramm. Remote Sens. 2010, 65, 227–240. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Large, A.R.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Rengers, F.K.; Tucker, G.E.; Moody, J.A.; Ebel, B.A. Illuminating wildfire erosion and deposition patterns with repeat terrestrial lidar. J. Geophys. Res. Earth Surf. 2016, 121, 588–608. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Murray Hicks, D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Hetherington, D. Application of a 3D laser scanner in the assessment of erosion and deposition volumes and channel change in a proglacial river. Earth Surf. Process. Landf. 2007, 32, 1657–1674. [Google Scholar] [CrossRef]
- Passalacqua, P.; Belmont, P.; Staley, D.M.; Simley, J.D.; Arrowsmith, J.R.; Bode, C.A.; Crosby, C.; DeLong, S.B.; Glenn, N.F.; Kelly, S.A. Analyzing high resolution topography for advancing the understanding of mass and energy transfer through landscapes: A review. Earth-Sci. Rev. 2015, 148, 174–193. [Google Scholar] [CrossRef] [Green Version]
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Goyer, G.G.; Watson, R. The laser and its application to meteorology. Bull. Am. Meteorol. Soc. 1963, 44, 564–570. [Google Scholar] [CrossRef]
- Arrowsmith, J.R.; Glenn, N.; Crosby, C.J.; Cowgill, E. Current capabilities and community needs for software tools and educational resources for use with LiDAR high resolution topography data. In Proceedings of the OpenTopography Meeting, San Diego, CA, USA, 8 August 2008; Volume 8, p. 2008. [Google Scholar]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Monserrat, O.; Crosetto, M. Deformation measurement using terrestrial laser scanning data and least squares 3D surface matching. ISPRS J. Photogramm. Remote Sens. 2008, 63, 142–154. [Google Scholar] [CrossRef]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Entwistle, N.; Heritage, G.; Milan, D. Recent remote sensing applications for hydro and morphodynamic monitoring and modelling. Earth Surf. Process. Landf. 2018, 43, 2283–2291. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Collins, B.D.; Brown, K.M.; Fairley, H.C. Evaluation of Terrestrial LIDAR for Monitoring Geomorphic Change at Archeological Sites in Grand Canyon National Park, Arizona; US Geological Survey: Reston, VA, USA, 2008.
- Brasington, J.; Rumsby, B.T.; McVey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Fuller, I.C.; Large, A.R.G.; Charlton, M.E.; Heritage, G.L.; Milan, D.J. Reach-scale sediment transfers: An evaluation of two morphological budgeting approaches. Earth Surf. Process. Landf. 2003, 28, 889–903. [Google Scholar] [CrossRef]
- Riegl, J.; Studnicka, N.; Ullrich, A. Merging and processing of laser scan data and high-resolution digital images acquired with a hybrid 3D laser sensor. In Proceedings of the CIPA 2003 XIXth International Symposium, Antalya, Turkey, 30 September–4 October 2003; pp. 511–516. [Google Scholar]
- Riegl. Available online: http://www.riegl.com (accessed on 4 June 2016).
- Vo, A.-V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on points cloud data acquired with a ground laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Fisher, P.F.; Tate, N.J. Causes and consequences of error in digital elevation models. Prog. Phys. Geogr. 2006, 30, 467–489. [Google Scholar] [CrossRef]
- Field, D.A. Laplacian smoothing and Delaunay triangulations. Int. J. Numer. Methods Biomed. Eng. 1988, 4, 709–712. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.-T.; Schachter, B.J. Two algorithms for constructing a Delaunay triangulation. Int. J. Comput. Inf. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Gens, R. Quality assessment of interferometrically derived digital elevation models. Int. J. Appl. Earth Obs. Geoinformation 1999, 1, 102–108. [Google Scholar] [CrossRef]
- Kaplinski, M.; Hazel, J.E., Jr.; Grams, P.E.; Davis, P.A. Monitoring Fine-Sediment Volume in the Colorado River Ecosystem, Arizona: Construction and Analysis of Digital Elevation Models; US Geological Survey: Reston, VA, USA, 2014. [Google Scholar]
- Collins, B.D.; Corbett, S.C.; Fairley, H.C.; Minasian, D.L.; Kayen, R.; Dealy, T.P.; Bedford, D.R. Topographic Change Detection at Select Archeological Sites in Grand Canyon National Park, Arizona, 2007–2010; US Geological Survey: Reston, VA, USA, 2012. [Google Scholar]
- Young, D.; Rust, B.; Team, W.C.B. Waldo Canyon Fire—Burned Area Emergency Response Soil Resource Assessment; USDA Forest Service, Region 5: Redding, CA, USA, 2012. [Google Scholar]
- Chin, A.; An, L.; Florsheim, J.L.; Laurencio, L.R.; Marston, R.A.; Solverson, A.P.; Simon, G.L.; Stinson, E.; Wohl, E. Investigating feedbacks in human–landscape systems: Lessons following a wildfire in Colorado, USA. Geomorphology 2016, 252, 40–50. [Google Scholar] [CrossRef]
- Kinoshita, A.M.; Chin, A.; Simon, G.L.; Briles, C.; Hogue, T.S.; O’Dowd, A.P.; Gerlak, A.K.; Albornoz, A.U. Wildfire, water, and society: Toward integrative research in the “Anthropocene”. Anthropocene 2016, 16, 16–27. [Google Scholar] [CrossRef]
- Riegl. 3D Terrestrial Laser Scanner with Online Waveform Processing; Technology Report; Riegl Laser Measurement Systems: Horn, Austria, 2012. [Google Scholar]
- Wheaton, J.M. Uncertainty in Morphological Sediment Budgeting of Rivers. Ph.D. Thesis, University of Southampton, Southampton, UK, 2008. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Products | Reference(s) |
|---|---|---|
| TLS | Point cloud collection | Riegl, 2012 |
| Tie point list | Data registration and georeferencing | Riegl et al., 2003 |
| Octree method | Point cloud filtering to decrease the size of data | Vo et al., 2015; Girardeau-Montaut et al., 2005 |
| Height difference between two nearby points | Remove vegetation and obtain the bare ground surface | Vosselman, 2000; Sithole and Vosselman, 2004 |
| Delaunay triangulation | Generate digital elevation models | Field, 1988; Lee and Schachter, 1980 |
| C2C, M3C2, C2M | Estimate topographic variations | Lague et al., 2013 |
| DOD | Calculate volumetric changes | Lane et al., 2003; Milan et al., 2007; Heritage et al., 2009; Wheaton et al., 2010 |
| Uncertainty of two point clouds from immovable objects in overlapping area | Estimate error in point clouds | Collins et al., 2012, Klapinski et al., 2014 |
| Uncertainty of DEMs based on comparison of cross sections before and after triangulation | Estimate error in DEMs after point clouds triangulation | Lague et al., 2013, Florsheim et al., 2017 |
| Error propagation | Propagate the errors from point clouds and DEMs | Staley et al., 2014; Passalacqua et al., 2015; Lane et al., 2003; Wheaton et al., 2010 |
| Volumetric error | Estimate error in volumetric changes | Lane et al., 2003; Staley et al., 2014, Florsheim et al., 2017 |
| Method | Mean Distance Difference in Elevation (m) | |||
|---|---|---|---|---|
| April 2013–September 2013 | September 2013–September 2014 | |||
| Net Changes | Accumulated Changes | Net Changes | Accumulated Changes | |
| DOD | −0.012 | 0.075 | 0.054 | 0.130 |
| C2C | - | 0.140 | - | 0.150 |
| C2M | −0.020 | - | 0.040 | - |
| M3C2 | −0.009 | - | 0.054 | - |
| Scans Date | RMSE (m) | ||
|---|---|---|---|
| x | y | h | |
| April 2013 | 0.007 | 0.007 | 0.003 |
| September 2013 | 0.008 | 0.006 | 0.004 |
| September 2014 | 0.008 | 0.005 | 0.006 |
| Scans | RMSE (m) |
|---|---|
| April 2013 | 0.012 |
| September 2013 | 0.014 |
| September 2014 | 0.009 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nourbakhshbeidokhti, S.; Kinoshita, A.M.; Chin, A.; Florsheim, J.L. A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance. Remote Sens. 2019, 11, 586. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11050586
Nourbakhshbeidokhti S, Kinoshita AM, Chin A, Florsheim JL. A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance. Remote Sensing. 2019; 11(5):586. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11050586
Chicago/Turabian StyleNourbakhshbeidokhti, Samira, Alicia M. Kinoshita, Anne Chin, and Joan L. Florsheim. 2019. "A Workflow to Estimate Topographic and Volumetric Changes and Errors in Channel Sedimentation after Disturbance" Remote Sensing 11, no. 5: 586. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11050586