Land Surface Temperature Retrieval from Sentinel-3A Sea and Land Surface Temperature Radiometer, Using a Split-Window Algorithm

 , ,
, ,
Abstract
:1. Introduction
2. Methodology
2.1. Theoretical Background
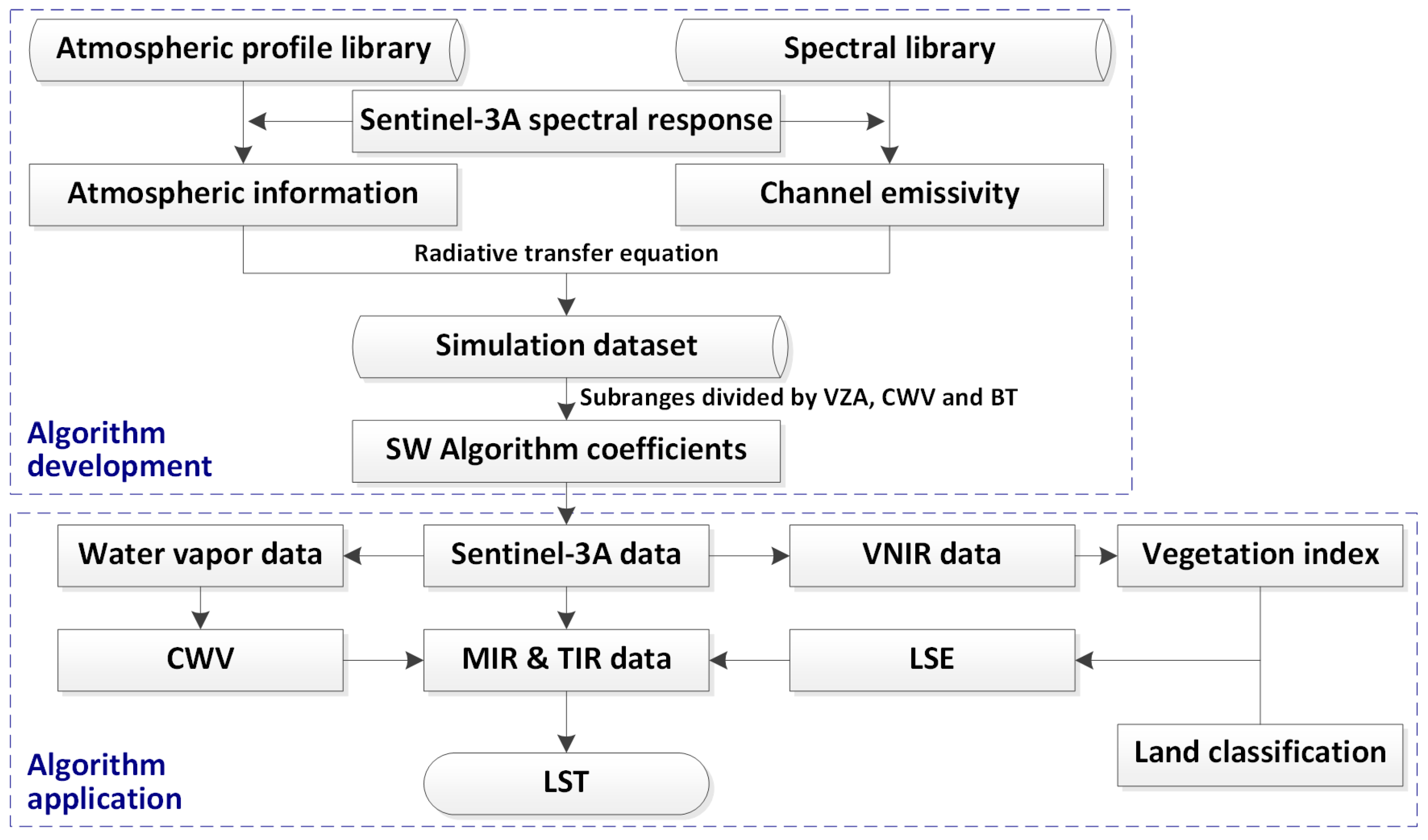
2.2. Algorithm Development
2.3. Simulation Dataset
2.4. Algorithm Coefficients and Analysis
2.5. Acquisition of Algorithm Input Parameters
3. Application and Validation
3.1. Application in LST Retrieval
3.2. Validation Using Ground-Based Measurement
4. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, Z.-L.; Becker, F. Feasibility of land surface temperature and emissivity determination from AVHRR data. Remote Sens. Environ. 1993, 43, 67–85. [Google Scholar] [CrossRef]
- Valor, E.; Caselles, V. Mapping land surface emissivity from NDVI: Application to European, African, and south American areas. Remote Sens. Environ. 1996, 57, 167–184. [Google Scholar] [CrossRef]
- Li, Z.-L.; Tang, B.-H.; Wu, H.; Ren, H.; Yan, G.; Wan, Z.; Trigo, I.F.; Sobrino, J.A. Satellite-derived land surface temperature: Current status and perspectives. Remote Sens. Environ. 2013, 131, 14–37. [Google Scholar] [CrossRef]
- Mcmillin, L.M. Estimation of sea surface temperatures from two infrared window measurements with different absorption. J. Geophys. Res. 1975, 80, 5113–5117. [Google Scholar] [CrossRef]
- Ren, H.; Liu, R.; Yan, G.; Mu, X.; Li, Z.-L.; Nerry, F.; Liu, Q. Angular normalization of land surface temperature and emissivity using multiangular middle and thermal infrared data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4913–4931. [Google Scholar] [CrossRef]
- Wan, Z.; Dozier, J. A generalized split-window algorithm for retrieving land-surface temperature from space. IEEE Trans. Geosci. Remote Sens. 1996, 34, 892–905. [Google Scholar] [CrossRef]
- Du, C.; Ren, H.; Qin, Q.; Meng, J.; Zhao, S. A practical split-window algorithm for estimating land surface temperature from Landsat 8 data. Remote Sens. 2015, 7, 647–665. [Google Scholar] [CrossRef]
- Tang, B.-H.; Bi, Y.; Li, Z.-L.; Xia, J. Generalized split-window algorithm for estimate of land surface temperature from Chinese geostationary FengYun meteorological satellite (FY-2C) data. Sensors 2008, 8, 933–951. [Google Scholar] [CrossRef]
- Ye, X.; Ren, H.; Liu, R.; Qin, Q.; Liu, Y.; Dong, J. Land surface temperature estimate from Chinese gaofen-5 satellite data using split-window algorithm. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5877–5888. [Google Scholar] [CrossRef]
- Sun, D.; Pinker, R.T. Estimation of land surface temperature from a geostationary operational environmental satellite (GOES-8). J. Geophys. Res. Atmos. 2003, 108, 4326. [Google Scholar] [CrossRef]
- Zhao, E.; Qian, Y.; Wang, N.; Ma, L.; Tang, L. Retrieval of night-time land surface temperature from two mid-infrared channels data. J. Infrared Millim. Waves 2014, 33, 303–310. [Google Scholar] [CrossRef]
- Zhao, E.; Qian, Y.; Gao, C.; Huo, H.; Jiang, X.; Kong, X. Land surface temperature retrieval using airborne hyperspectral scanner daytime mid-infrared data. Remote Sens. 2014, 6, 12667–12685. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Ghent, D.J.; Corlett, G.K.; Göttsche, F.-M.; Remedios, J.J. Global land surface temperature from the along-track scanning radiometers. J. Geophys. Res. Atmos. 2017, 122, 12167–12193. [Google Scholar] [CrossRef]
- Ruescas, A.B.; Jiménez-Muñoz, J.C.; Sobrino, J.A. SEN4LST DEV5: LST Retrieval—Algorithm Theoretical Basis Document (ATBD); Technical Report; The European Space Research and Technology Centre: Frascati, Italy, 2012. [Google Scholar] [CrossRef]
- Wan, Z. New refinements and validation of the collection-6 MODIS land-surface temperature/emissivity product. Remote Sens. Environ. 2014, 140, 36–45. [Google Scholar] [CrossRef]
- Mushkin, A.; Balick, L.K.; Gillespie, A.R. Extending surface temperature and emissivity retrieval to the mid-infrared (3–5 μm) using the multispectral thermal imager (MTI). Remote Sens. Environ. 2005, 98, 141–151. [Google Scholar] [CrossRef]
- Sun, D.; Pinker, R.T. Retrieval of surface temperature from the MSG-SEVIRI observations: Part I. methodology. Int. J. Remote Sens. 2007, 28, 5255–5272. [Google Scholar] [CrossRef]
- Chédin, A.; Scott, N.A.; Wahiche, C.; Moulinier, P. The improved initialization inversion method: A high resolution physical method for temperature retrievals from satellites of the TIROS-N series. J. Appl. Meteorol. 1985, 24, 128–143. [Google Scholar] [CrossRef]
- Chevallier, F.; Chéruy, F.; Scott, N.A.; Chédin, A. A neural network approach for a fast and accurate computation of a longwave radiative budget. J. Appl. Meteorol. 1998, 37, 1385–1397. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golden, S.M.; Chetwynd, J.H.; Hoke, M.L.; et al. Modtran5: A reformulated atmospheric band model with auxiliary species and practical multiple scattering options. Multispectral Hyperspectral Remote Sens. Instrum. Appl. II 2005, 5655, 88–95. [Google Scholar] [CrossRef]
- Ren, H.; Du, C.; Liu, R.; Qin, Q.; Yan, G.; Li, Z.-L.; Meng, J. Atmospheric water vapor retrieval from Landsat 8 thermal infrared images. J. Geophys. Res. Atmos. 2015, 120, 1723–1738. [Google Scholar] [CrossRef]
- Baldridge, A.M.; Hook, S.J.; Grove, C.I.; Rivera, G. The ASTER spectral library version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Snyder, W.C.; Wan, Z.; Zhang, Y.; Feng, Y.-Z. Classification-based emissivity for land surface temperature measurement from space. Int. J. Remote Sens. 1998, 19, 2753–2774. [Google Scholar] [CrossRef]
- Sobrino, J.A.; Raissouni, N. Toward remote sensing methods for land cover dynamic monitoring: Application to morocco. Int. J. Remote Sens. 2000, 21, 353–366. [Google Scholar] [CrossRef]
- Tang, B.-H.; Shao, K.; Li, Z.-L.; Wu, H.; Tang, R. An improved NDVI-based threshold method for estimating land surface emissivity using MODIS satellite data. Int. J. Remote Sens. 2015, 36, 4864–4878. [Google Scholar] [CrossRef]
- Ren, H.; Liu, R.; Qin, Q.; Fan, W.; Yu, L.; Du, C. Mapping finer-resolution land surface emissivity using Landsat images in China. J. Geophys. Res. Atmos. 2017, 122, 6764–6781. [Google Scholar] [CrossRef]
- Caselles, E.; Valor, E.; Abad, F.; Caselles, V. Automatic classification-based generation of thermal infrared land surface emissivity maps using AATSR data over Europe. Remote Sens. Environ. 2012, 124, 321–333. [Google Scholar] [CrossRef]
- Carlson, T.N.; Ripley, D.A. On the relation between NDVI, fractional vegetation cover, and leaf area index. Remote Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Prihodko, L.; Goward, S.N. Estimation of air temperature from remotely sensed surface observations. Remote Sens. Environ. 1992, 60, 335–346. [Google Scholar] [CrossRef]
- Tang, R.; Li, Z.-L.; Tang, B.-H. An application of the Ts-VI triangle method with enhanced edges determination for evapotranspiration estimation from MODIS data in arid and semi-arid regions: Implementation and validation. Remote Sens. Environ. 2010, 114, 540–551. [Google Scholar] [CrossRef]
- Friedl, M.A.; Mciver, D.K.; Hodges, J.C.F.; Zhang, X.Y.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A.; et al. Global land cover mapping from modis: Algorithms and early results. Remote Sens. Environ. 2002, 83, 287–302. [Google Scholar] [CrossRef]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. Modis collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Loveland, T.R.; Belward, A.S. The international geosphere biosphere programme data and information system global land cover data set (DISCover). Acta Astronaut. 1997, 41, 681–689. [Google Scholar] [CrossRef]
- Belward, A.S.; Estes, J.E.; Kline, K.D. The IGBP-DIS global 1-km land-cover data set discover: A project overview. Photogramm. Eng. Remote Sens. 1999, 65, 1013–1020. [Google Scholar]
- Hansen, M.C.; Defries, R.S.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Running, S.W.; Nemani, R.R.; Heinsch, F.A.; Zhao, M.; Reeves, M.C.; Hashimoto, H. A continuous satellite-derived measure of global terrestrial primary production. BioScience 2004, 54, 547. [Google Scholar] [CrossRef]
- Myneni, R.B.; Hoffman, S.; Knyazikhin, Y.; Privette, J.L.; Glassy, J.; Tian, Y.; Wang, Y.; Song, X.; Zhang, Y.; Smith, G.R.; et al. Global products of vegetation leaf area and fraction absorbed PAR from year one of MODIS data. Remote Sens. Environ. 2002, 83, 214–231. [Google Scholar] [CrossRef]
- Bonan, G.B. Landscapes as patches of plant functional types: An integrating concept for climate and ecosystem models. Glob. Biogeochem. Cycles 2002, 16, 1021. [Google Scholar] [CrossRef]
- Di Gregorio, A. Land Cover Classification System: Classification Concepts and User Manual: LCCS; Number 8; Food and Agriculture Organization: Rome, Italy, 2005. [Google Scholar]
- Sulla-Menashe, D.; Friedl, M.A.; Krankina, O.N.; Baccini, A.; Woodcock, C.E.; Sibley, A.; Sun, G.; Kharuk, V.; Elsakov, V. Hierarchical mapping of Northern Eurasian land cover using MODIS data. Remote Sens. Environ. 2011, 115, 392–403. [Google Scholar] [CrossRef]
- Wang, K.; Liang, S. Evaluation of ASTER and MODIS land surface temperature and emissivity products using long-term surface longwave radiation observations at SURFRAD sites. Remote Sens. Environ. 2009, 113, 1556–1565. [Google Scholar] [CrossRef]
- Ogawa, K.; Schmugge, T. Mapping surface broadband emissivity of the Sahara desert using ASTER and MODIS data. Earth Interact. 2004, 8, 1–14. [Google Scholar] [CrossRef]
- Fan, X.; Tang, B.-H.; Wu, H.; Yan, G.; Li, Z.-L.; Zhou, G.; Shao, K.; Bi, Y. Extension of the generalized split-window algorithm for land surface temperature retrieval to atmospheres with heavy dust aerosol loading. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 825–834. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CWV (g/cm2) | BT (K) | a0 | a1 | a2 | a3 | a4 | a5 | a6 | a7 | RMSE (K) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Without Noise | With Noise | ||||||||||
| [0, 2.5] | (0, 285) | −3.062 | 1.015 | 0.167 | −0.323 | 3.559 | 3.865 | 15.789 | −0.181 | 0.21 | 1.32 |
| [285, 300) | −4.826 | 1.020 | 0.192 | −0.298 | 3.402 | 0.623 | −5.283 | 0.055 | 0.33 | 1.43 | |
| [300, 315) | 2.899 | 0.994 | 0.191 | −0.313 | 2.908 | 3.614 | −13.992 | 0.144 | 0.31 | 1.75 | |
| [315, +∞) | 9.103 | 0.977 | 0.195 | −0.319 | 2.548 | 3.524 | −12.441 | 0.123 | 0.30 | 1.87 | |
| [2, 3.5] | (0, 285) | 20.916 | 0.926 | 0.174 | −0.263 | 5.756 | −0.147 | 8.598 | −0.254 | 0.43 | 1.27 |
| [285, 300) | 13.663 | 0.951 | 0.187 | −0.283 | 6.372 | 0.345 | −0.756 | −0.106 | 0.53 | 1.41 | |
| [300, 315) | 16.841 | 0.942 | 0.199 | −0.299 | 5.041 | 1.398 | −7.915 | 0.054 | 0.57 | 1.71 | |
| [315, +∞) | 25.420 | 0.915 | 0.214 | −0.371 | 4.985 | 0.076 | −1.549 | 0.036 | 0.51 | 1.93 | |
| [3, 4.5] | (0, 285) | 47.842 | 0.829 | 0.155 | −0.189 | 6.900 | 3.078 | −5.235 | −0.352 | 0.71 | 1.07 |
| [285, 300) | 13.359 | 0.949 | 0.144 | −0.178 | 6.660 | 6.447 | −10.709 | −0.042 | 0.59 | 1.12 | |
| [300, 315) | 9.721 | 0.964 | 0.164 | −0.194 | 5.689 | 3.657 | −10.460 | 0.030 | 0.81 | 1.52 | |
| [315, +∞) | 63.312 | 0.796 | 0.236 | −0.256 | 4.489 | −2.393 | −9.569 | 0.084 | 1.02 | 1.94 | |
| [4, 6.5] | (0, 285) | −10.657 | 1.033 | 0.108 | −0.117 | 6.780 | −0.212 | −8.853 | −0.212 | 0.32 | 0.58 |
| [285, 300) | −0.600 | 0.995 | 0.121 | −0.120 | 6.558 | 5.241 | −9.541 | 0.033 | 0.78 | 1.07 | |
| [300, 315) | 8.622 | 0.968 | 0.138 | −0.106 | 5.732 | 4.703 | −14.378 | 0.053 | 1.04 | 1.51 | |
| [315, +∞) | 203.901 | 0.637 | −0.332 | 1.179 | −44.482 | 47.653 | −130.253 | 1.732 | 1.28 | 2.08 | |
| CWV (g/cm2) | BT (K) | b0 | b1 | b2 | b3 | b4 | b5 | b6 | RMSE (K) | |
|---|---|---|---|---|---|---|---|---|---|---|
| b7 | b8 | b9 | b10 | b11 | b12 | b13 | Without Noise | With Noise | ||
| [0, 2.5] | (0, 280) | −3.050 | 1.015 | 0.165 | −0.281 | 3.394 | −0.032 | 30.614 | 0.23 | 1.19 |
| −0.366 | −6.978 | −4.598 | 0.074 | 6.010 | 4.417 | −0.091 | ||||
| [280, 290) | 1.036 | 0.999 | 0.183 | −0.320 | 4.540 | 16.407 | 9.147 | 0.37 | 1.49 | |
| −0.139 | 5.744 | −2.027 | 0.089 | −5.493 | 1.879 | −0.078 | ||||
| [290, 300) | −0.994 | 1.005 | 0.190 | −0.297 | 4.420 | −21.120 | 15.620 | 0.32 | 1.29 | |
| −0.192 | −8.156 | 2.550 | −0.078 | 7.225 | −3.717 | 0.106 | ||||
| [300, +∞) | −2.965 | 1.014 | 0.196 | −0.250 | 3.117 | −30.338 | 13.061 | 0.25 | 1.07 | |
| −0.140 | −12.612 | 3.166 | −0.101 | 11.758 | −4.529 | 0.133 | ||||
| [2, 3.5] | (0, 280) | 16.807 | 0.941 | 0.160 | −0.311 | 4.809 | 21.523 | −7.853 | 0.43 | 1.36 |
| −0.079 | 14.058 | 5.224 | 0.024 | −12.160 | −3.424 | −0.075 | ||||
| [280, 290) | 15.340 | 0.947 | 0.163 | −0.283 | 5.113 | 23.413 | −16.580 | 0.50 | 1.37 | |
| 0.132 | 14.299 | 3.267 | 0.053 | −10.967 | −0.761 | −0.109 | ||||
| [290, 300) | 10.520 | 0.962 | 0.175 | −0.266 | 6.814 | −13.047 | 16.083 | 0.50 | 1.14 | |
| −0.409 | 1.226 | 7.296 | −0.144 | 1.660 | −5.080 | 0.094 | ||||
| [300, +∞) | −9.796 | 1.030 | 0.203 | −0.265 | 6.798 | −38.554 | 35.950 | 0.31 | 0.82 | |
| −0.572 | −11.883 | 5.363 | −0.138 | 13.938 | −5.256 | 0.151 | ||||
| [3, 4.5] | (0, 280) | 13.462 | 0.951 | 0.082 | −0.238 | 3.172 | 17.880 | −10.185 | 0.61 | 1.01 |
| −0.186 | 4.671 | 7.400 | −0.076 | −8.581 | −6.134 | −0.063 | ||||
| [280, 290) | 6.348 | 0.978 | 0.075 | −0.218 | 5.772 | 17.963 | 3.681 | 0.64 | 1.11 | |
| −0.195 | 7.061 | 10.284 | −0.273 | −8.638 | −7.734 | 0.104 | ||||
| [290, 300) | −2.472 | 1.006 | 0.121 | −0.185 | 6.454 | −2.422 | 9.853 | 0.57 | 0.89 | |
| −0.378 | 3.098 | 9.329 | −0.247 | −0.664 | −5.970 | 0.134 | ||||
| [300, +∞) | −13.935 | 1.043 | 0.183 | −0.172 | 7.051 | −25.340 | 16.953 | 0.35 | 0.70 | |
| −0.511 | −5.771 | 5.698 | −0.129 | 8.950 | −4.591 | 0.123 | ||||
| [4, 6.5] | (0, 280) | −40.985 | 1.140 | 0.051 | −0.156 | 2.083 | 11.440 | −18.210 | 0.17 | 0.46 |
| −0.096 | −7.460 | 4.087 | −0.033 | 0.024 | −4.227 | −0.082 | ||||
| [280, 290) | −31.370 | 1.110 | −0.010 | −0.136 | 5.085 | 20.570 | 6.600 | 0.65 | 0.88 | |
| −0.363 | −3.090 | 8.271 | −0.392 | −5.483 | −7.983 | 0.167 | ||||
| [290, 300) | −14.693 | 1.047 | 0.099 | −0.121 | 8.147 | −20.388 | 23.113 | 0.57 | 0.58 | |
| −1.045 | −6.059 | 13.139 | −0.449 | 8.040 | −9.678 | 0.302 | ||||
| [300, +∞) | −32.582 | 1.102 | 0.141 | −0.102 | 8.746 | −22.234 | 12.728 | 0.29 | 1.00 | |
| −0.708 | −6.499 | 5.360 | −0.132 | 9.772 | −4.499 | 0.132 | ||||
| Land Cover Types | εv | εs | ||||
|---|---|---|---|---|---|---|
| Ch-7 | Ch-8 | Ch-9 | Ch-7 | Ch-8 | Ch-9 | |
| Evergreen Needleleaf Forests | 0.981 | 0.983 | 0.982 | 0.855 | 0.970 | 0.975 |
| Evergreen Broadleaf Forests | 0.984 | 0.983 | 0.982 | 0.855 | 0.970 | 0.975 |
| Deciduous Needleleaf Forests | 0.981 | 0.983 | 0.982 | 0.855 | 0.970 | 0.975 |
| Deciduous Broadleaf Forests | 0.984 | 0.983 | 0.982 | 0.855 | 0.970 | 0.975 |
| Mixed Forests | 0.983 | 0.983 | 0.982 | 0.855 | 0.970 | 0.975 |
| Closed Shrublands | 0.983 | 0.982 | 0.983 | 0.776 | 0.971 | 0.974 |
| Open Shrublands | 0.983 | 0.982 | 0.983 | 0.776 | 0.971 | 0.974 |
| Woody Savannas | 0.984 | 0.983 | 0.983 | 0.816 | 0.971 | 0.975 |
| Savannas | 0.984 | 0.982 | 0.984 | 0.776 | 0.971 | 0.974 |
| Grasslands | 0.984 | 0.982 | 0.984 | 0.776 | 0.971 | 0.974 |
| Permanent Wetlands | 0.984 | 0.982 | 0.984 | 0.897 | 0.983 | 0.982 |
| Croplands | 0.984 | 0.982 | 0.984 | 0.827 | 0.974 | 0.978 |
| Urban and Build-up | - | - | - | 0.931 | 0.959 | 0.966 |
| Cropland–Natural Vegetation Mosaics | 0.984 | 0.982 | 0.984 | 0.827 | 0.974 | 0.978 |
| Snow and Ice | - | - | - | 0.979 | 0.990 | 0.974 |
| Barren or Sparsely Vegetated | 0.941 | 0.954 | 0.953 | 0.848 | 0.968 | 0.975 |
| Water Bodies | - | - | - | 0.973 | 0.991 | 0.986 |
| Site Names | Project | Latitude | Longitude | Land Cover | Bias (K) Day/Night | RMSE (K) Day/Night |
|---|---|---|---|---|---|---|
| Bondville_IL (BND) | SURFRAD | 40.05°N | 88.37°W | Cropland | 1.18/0.36 | 2.99/1.02 |
| Goodwin_Creek_MS (GCM) | SURFRAD | 34.25°N | 89.87°W | Pasture | 0.03/1.92 | 1.60/2.51 |
| Penn_State_PA (PSU) | SURFRAD | 40.72°N | 77.93°W | Cropland | 1.03/1.79 | 2.15/2.88 |
| Sioux_Falls_SD (SXF) | SURFRAD | 43.73°N | 96.62°W | Cropland | 0.96/0.77 | 1.62/1.27 |
| Hebei_Chengde (HBC) | PKULSTNet | 42.41°N | 117.25°E | Grassland | −0.96/0.56 | 1.47/1.68 |
| Henan_Hebi (HNH) | PKULSTNet | 35.72°N | 114.32°E | Cropland | −0.10/0.73 | 2.41/1.60 |
| InnerMongolia_Baotou (IMB) | PKULSTNet | 41.35°N | 111.21°E | Grassland | 1.81/−0.11 | 2.52/1.42 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Ren, H.; Guo, J.; Ghent, D.; Tansey, K.; Hu, X.; Nie, J.; Chen, S. Land Surface Temperature Retrieval from Sentinel-3A Sea and Land Surface Temperature Radiometer, Using a Split-Window Algorithm. Remote Sens. 2019, 11, 650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060650
Zheng Y, Ren H, Guo J, Ghent D, Tansey K, Hu X, Nie J, Chen S. Land Surface Temperature Retrieval from Sentinel-3A Sea and Land Surface Temperature Radiometer, Using a Split-Window Algorithm. Remote Sensing. 2019; 11(6):650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060650
Chicago/Turabian StyleZheng, Yitong, Huazhong Ren, Jinxin Guo, Darren Ghent, Kevin Tansey, Xingbang Hu, Jing Nie, and Shanshan Chen. 2019. "Land Surface Temperature Retrieval from Sentinel-3A Sea and Land Surface Temperature Radiometer, Using a Split-Window Algorithm" Remote Sensing 11, no. 6: 650. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060650