The Terra Vega Active Light Source: A First Step in a New Approach to Perform Nighttime Absolute Radiometric Calibrations and Early Results Calibrating the VIIRS DNB

 , and
, and
Abstract
:1. Introduction
2. Terra Vega Design and Hardware Approach
2.1. Terra Vega Performance Goals and Criteria
2.2. Terra Vega Required Source Intensity
Terra Vega TOA Radiometric Expected Uncertainty in an Operational Setting
- Sphere radiance (radiance standard)
- Sphere exit port area
- Sphere and trailer window transmission (two windows)
- Pointing
- VIIRS GSD
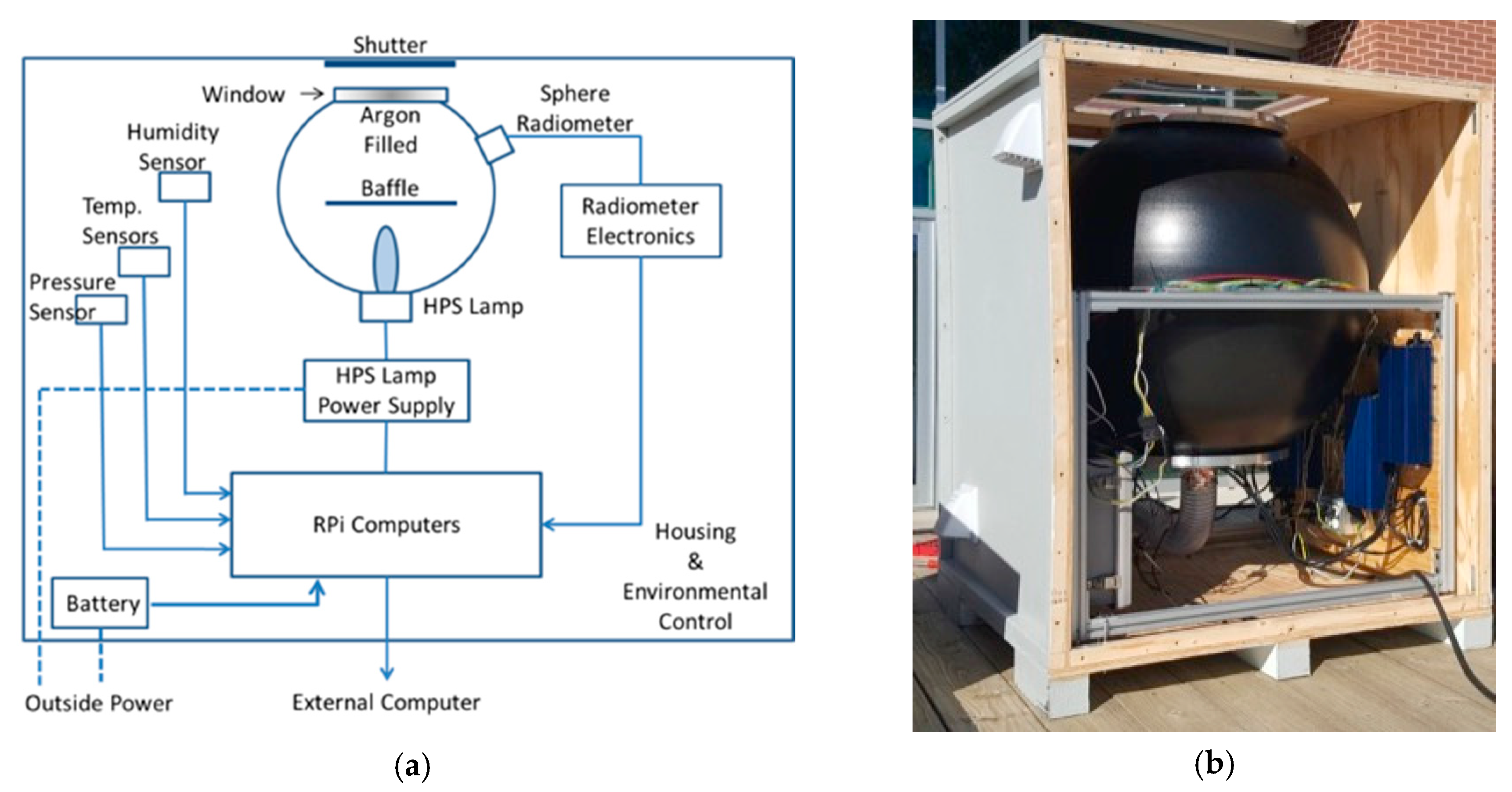
2.3. Terra Vega Hardware Implementation
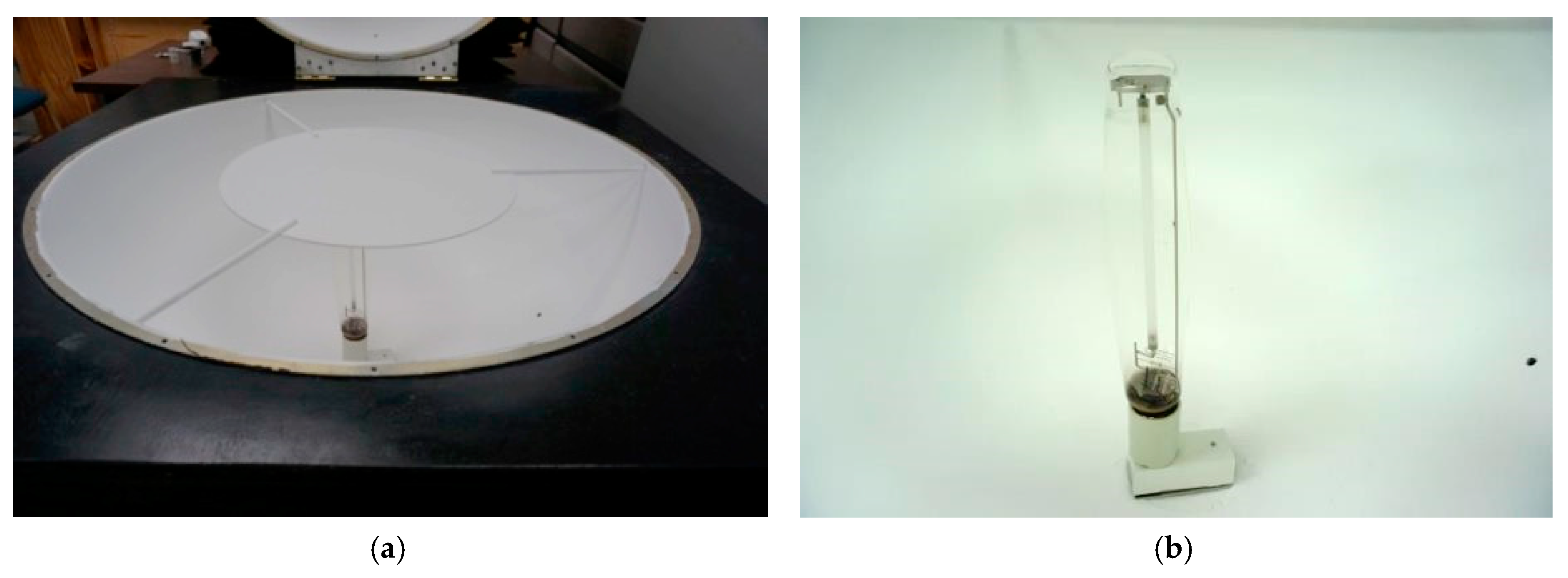
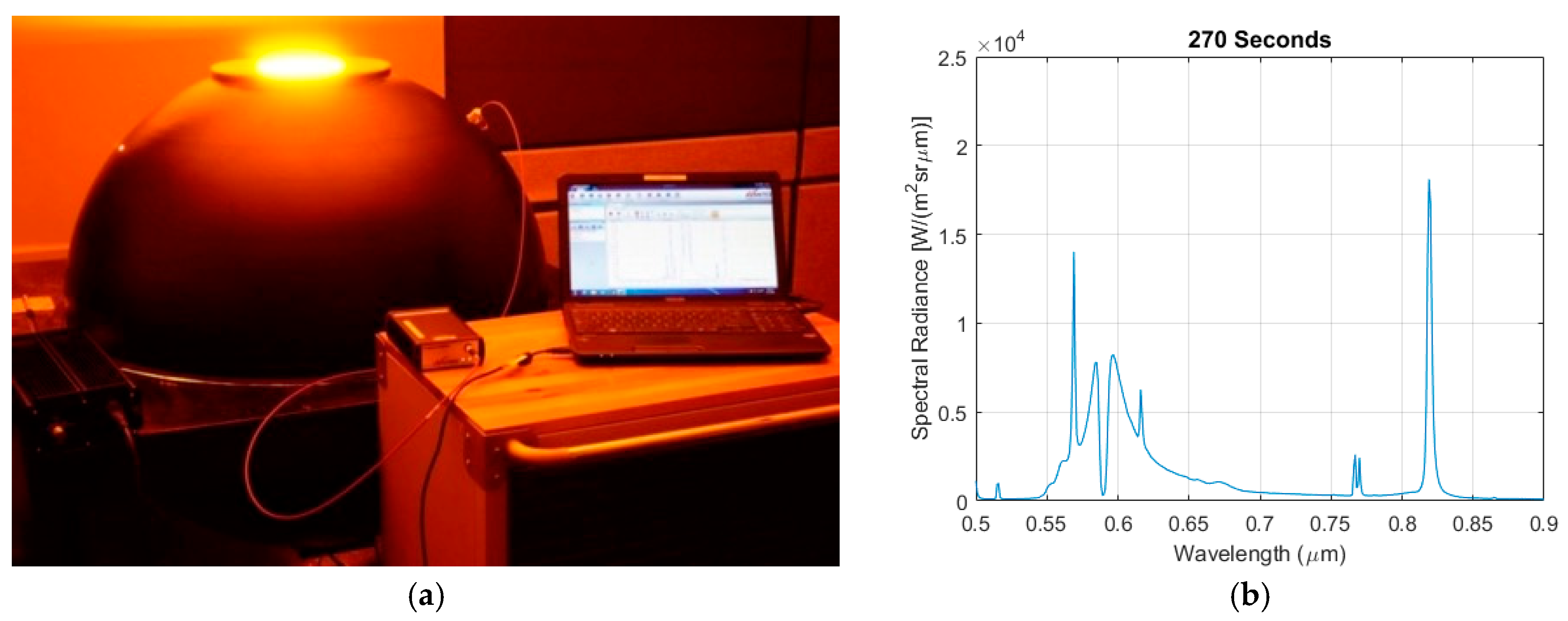
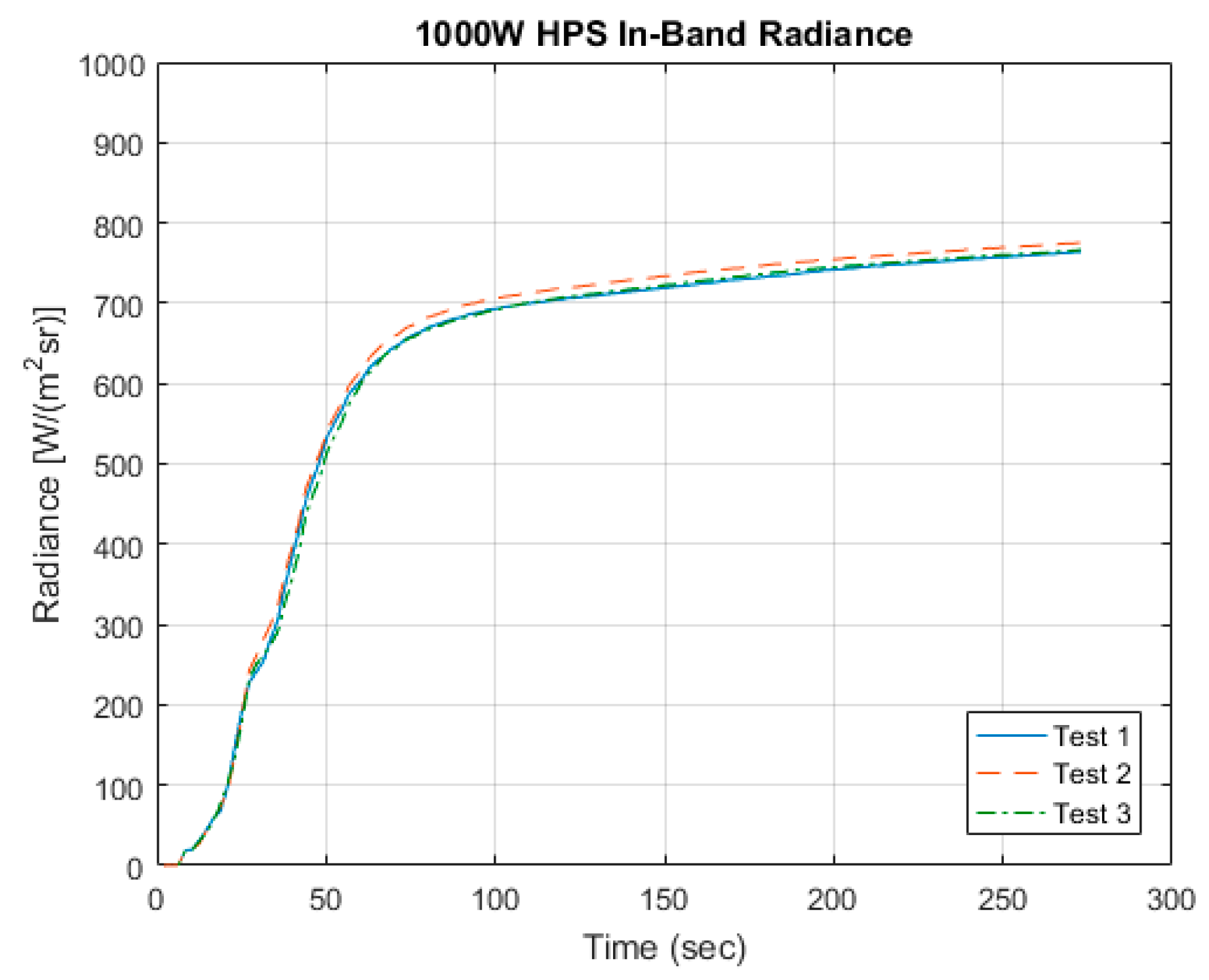
2.3.1. Terra Vega Illumination
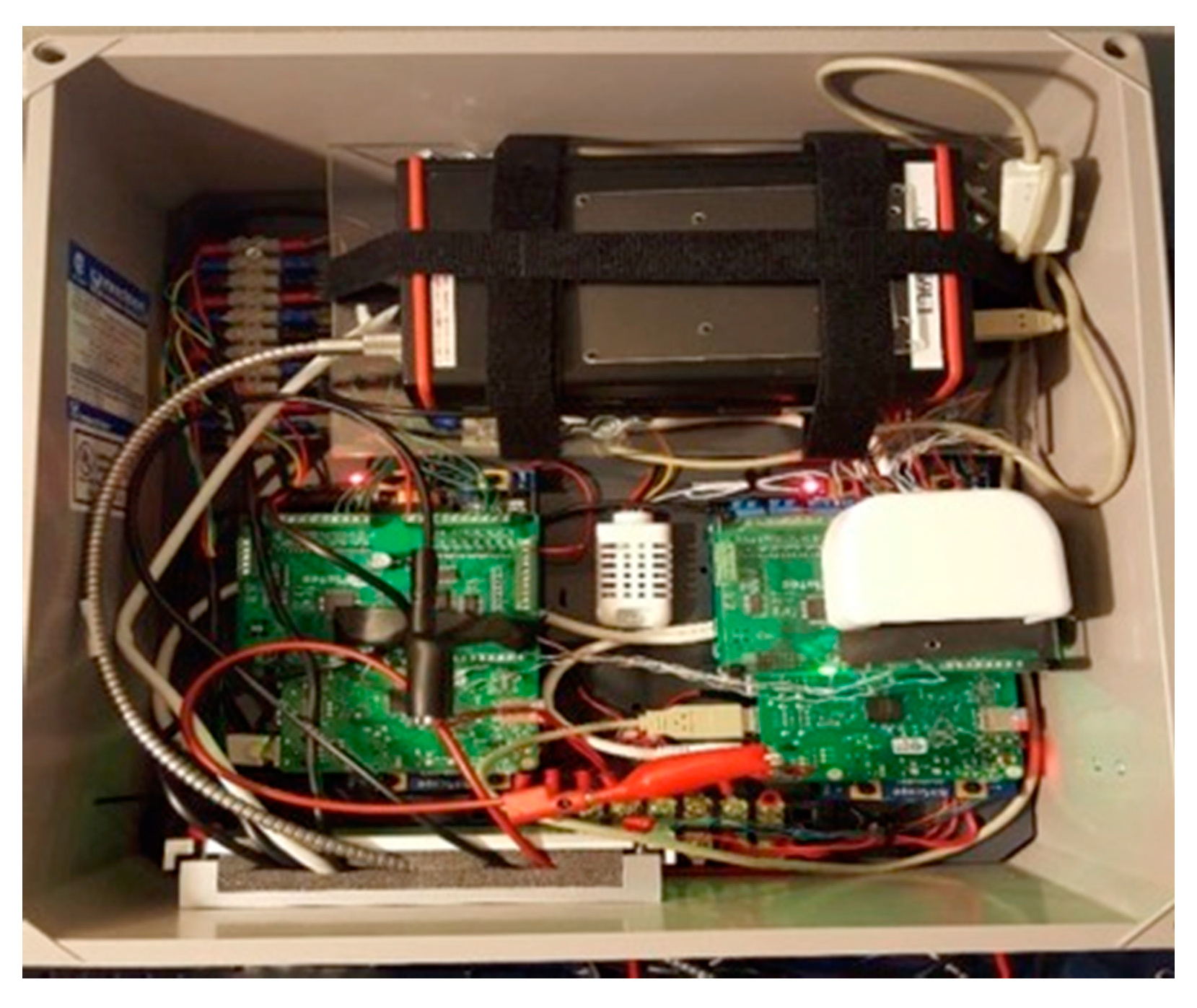
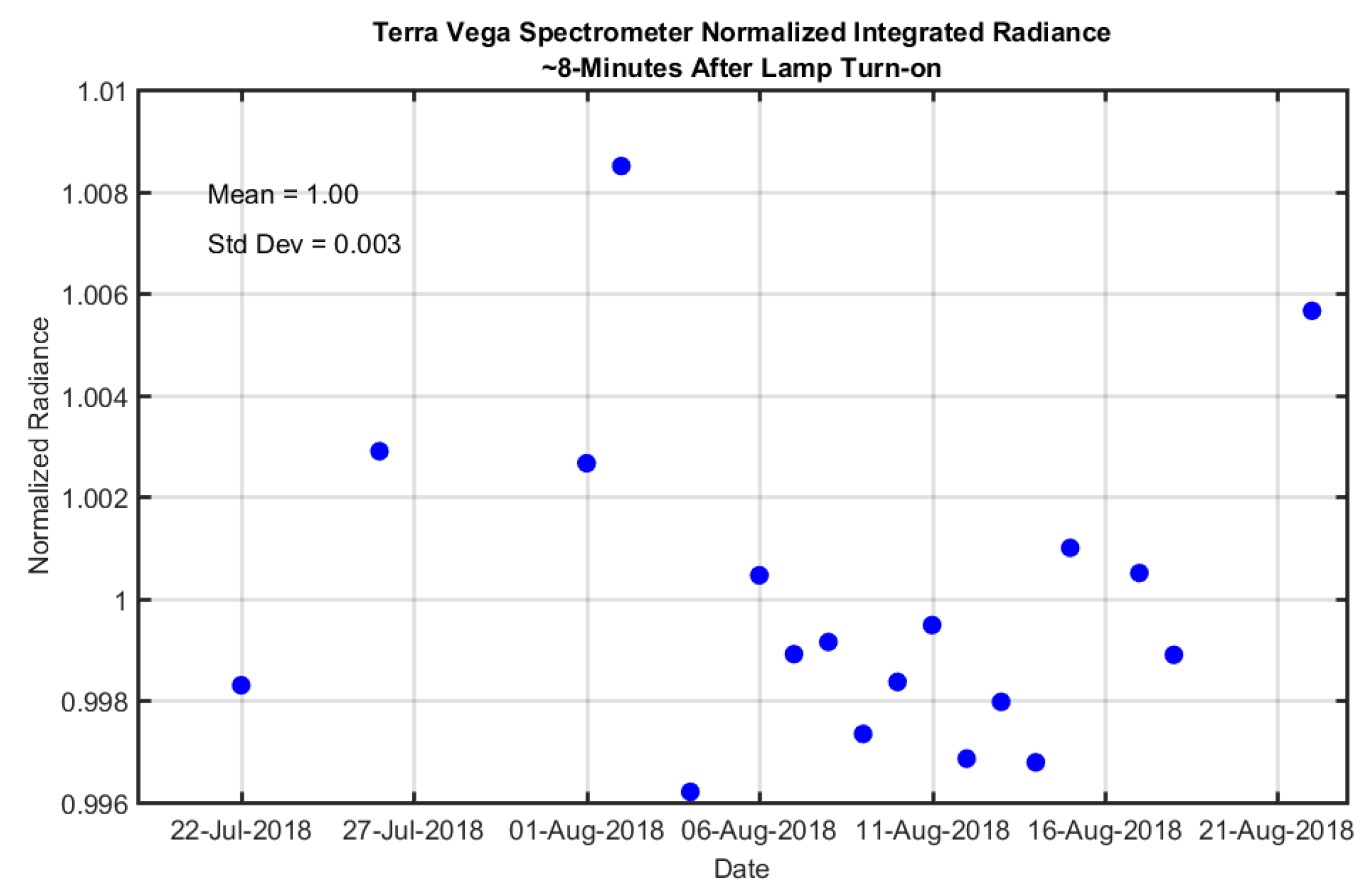
2.3.2. Terra Vega Automation and Control
Logging RPi3
Sequence RPi3
3. VIIRS DNB HGS Calibration and Feasibility Sites, Methods and Results
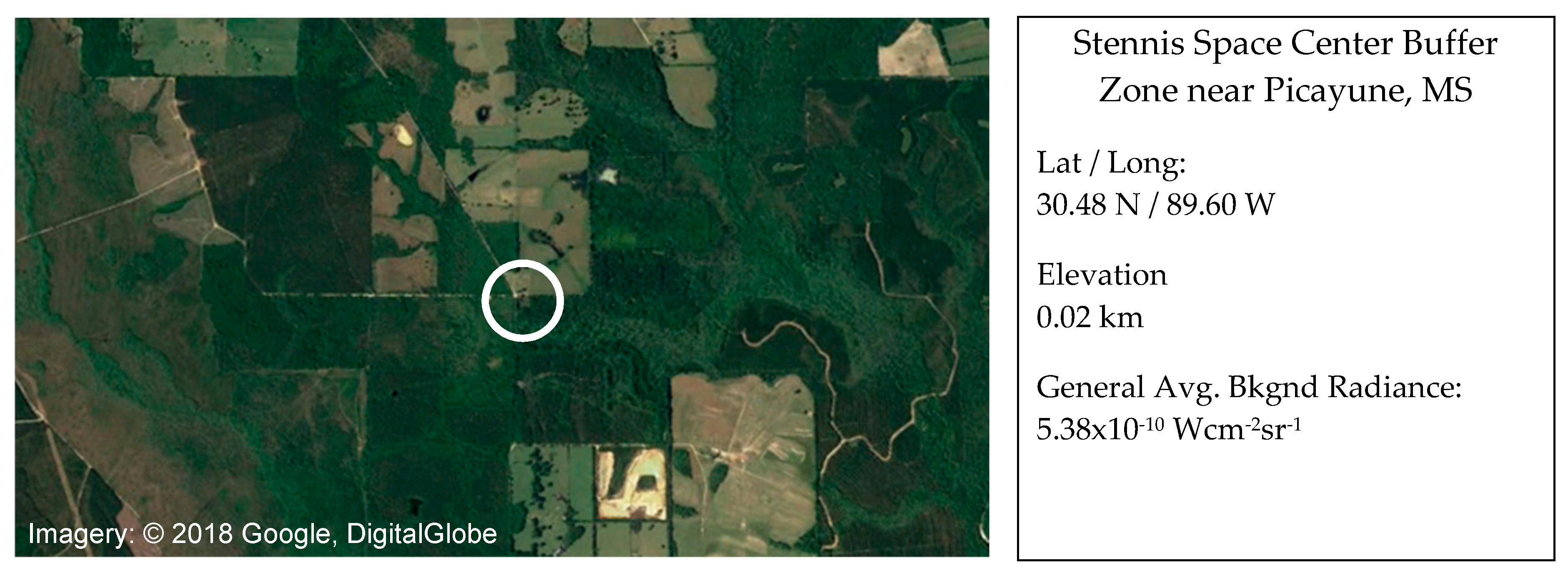
3.1. Calibration Sites
3.2. Calibration Method
3.2.1. VIIRS Measured Radiance
3.2.2. Terra Vega Measured Ground Source Radiance
3.2.3. Atmospheric Modeling
MODTRAN Model Atmosphere
3.2.4. TOA Terra Vega Radiance
3.2.5. Comparison of TOA Terra Vega Radiance to VIIRS Measured Radiance
4. Conclusions
5. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Román, M.O.; Wang, Z.; Sun, Q.; Kalb, V.; Miller, S.D.; Molthan, A.; Schultz, L.; Bell, J.; Stokes, E.C.; Pandey, B.; et al. NASA’s Black Marble nighttime lights product suite. Remote Sens. Environ. 2018, 210, 113–143. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Baugh, K.E.; Zhizhi, M.; Hsu, F.-C. Why VIIRS data are superior to DMSP for mapping nighttime lights. Proc. Asia Pac. Adv. Netw. 2013, 35, 62–69. [Google Scholar] [CrossRef]
- Johnson, R.S.; Zhang, J.; Hyer, E.J.; Miller, S.D.; Reid, J.S. Preliminary investigations toward night time aerosol optical depth retrievals from the VIIRS Day/Night Band. Atmos. Meas. Tech. 2013, 6, 1245–1255. [Google Scholar] [CrossRef]
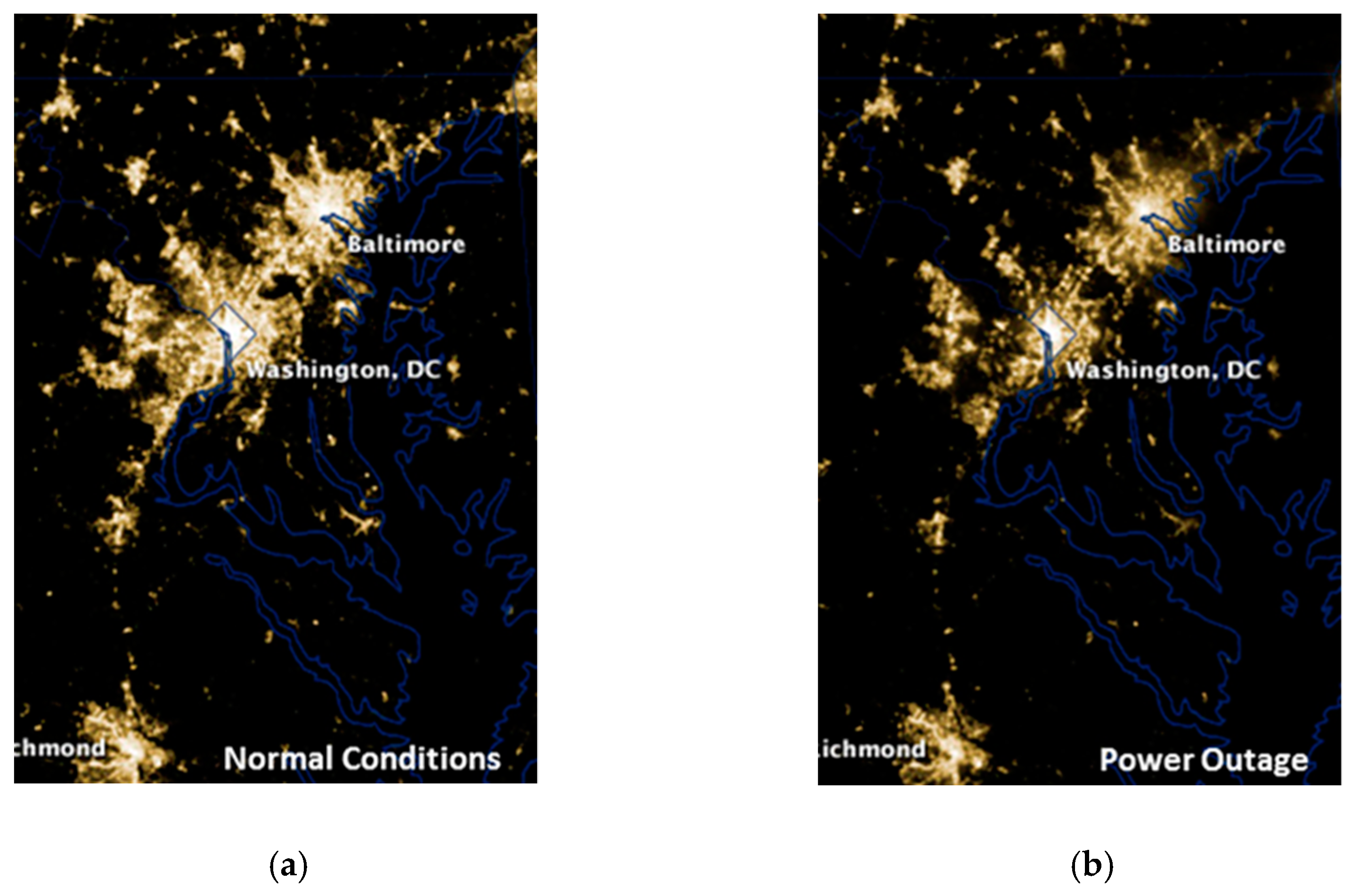
- Cao, C.; Shao, X.; Uprety, S. Detecting Light Outages after Severe Storms Using the S-NPP/VIIRS Day/Night Band Radiances, Geoscience and Remote Sensing Letters. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1582–1586. [Google Scholar] [CrossRef]
- NASA Earth Observatory. Available online: https://earthobservatory.nasa.gov/images/78445 (accessed on 15 July 2018).
- Cao, C.; Bai, Y. Quantitative analysis of VIIRS DNB nightlight point source for light power estimation and stability monitoring. Remote Sens. 2014, 6, 11915–11935. [Google Scholar] [CrossRef]
- Liao, L.; Weiss, S.; Mills, S.; Hauss, B. Suomi NPP VIIRS day-night band on-orbit performance. J. Geophys. Res. 2013, 118, 12705–12718. [Google Scholar] [CrossRef]
- Ma, S.; Yan, W.; Huang, Y.-X.; Ai, W.-H.; Zhao, X. Vicarious calibration of S-NPP/VIIRS day-night band using deep convective clouds. Remote Sens. Environ 2015, 158, 42–55. [Google Scholar] [CrossRef]
- Cao, C.; Zong, Y.; Bai, Y.; Shao, X. Preliminary study for improving the VIIRS DNB low light calibration accuracy with ground based active light source. In Earth Observing Systems XX; 96070D1-96070D8; Butler, J.J., Xiong, X., Eds.; International Society for Optics and Photonics: San Diego, CA, USA, 2015. [Google Scholar] [CrossRef]
- Tuttle, B.T.; Anderson, S.; Elvidge, C.; Ghosh, T.; Baugh, K.; Sutton, P. Aladdin’s Magic Lamp: Active Target Calibration of the DMSP OLS. Remote Sens. 2014, 6, 12708–12722. [Google Scholar] [CrossRef] [Green Version]
- Fulbright, J.P.; Xiaoxiong, X. Suomi-NPP VIIRS day/night band calibration with stars. In Earth Observing Systems XX; Butler, J.J., Xiong, X., Eds.; International Society for Optics and Photonics: San Diego, CA, USA, 2015; p. 96071S. [Google Scholar] [CrossRef]
- Smith, A.W.; Woodward, J.T.; Jenkins, C.A.; Brown, S.W.; Lykke, K.R. Absolute flux calibration of stars: Calibration of the reference telescope. Metrologia 2009, 46, S219. [Google Scholar] [CrossRef]
- NOAA Small Business Innovation Research FY2015 Amendment 0001 dated October 16, 2014, Program Solicitation: NOAA2015-1, Subtopic 8.4.3D. Available online: https://www.sbir.gov/node/691982 (accessed on 17 February 2019).
- Wolfe, W.L. Introduction to Radiometry, Tutorial Texts in Optical Engineering Vol. TT29; SPIE Press: Bellingham, WA, USA, 1998; pp. 3–25. ISBN 9780819427588. [Google Scholar]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golder, S.M.; Chetwynd, J.H.; Hoke, M.L.; et al. MODTRAN 5: A reformulated atmospheric band model with auxiliary species and practical multiple scattering options: Update. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery X.; Shen, S.S., Lewis, P.L., Eds.; International Society for Optics and Photonics: Orlando, FL, USA, 2005; Volume 5806, pp. 662–668. ISBN 9780819457912. [Google Scholar]
- Schueler, C.F.; Clement, J.E.; Ardanuy, P.E.; Welsch, C.; DeLuccia, F.; Swenson, H. NPOESS VIIRS sensor design overview. In Earth Observing Systems VI; International Society for Optics and Photonics: San Diego, CA, USA, 2002; Volume 4483, pp. 11–24. [Google Scholar] [CrossRef]
- Schott, J.R. Remote Sensing: The Image Chain Approach; Oxford University Press on Demand: New York, NY, USA, 2007. [Google Scholar]
- Tanré, D.; Herman, M.; Deschamps, P.Y.; De Leffe, A. Atmospheric modeling for space measurements of ground reflectances, including bidirectional properties. Appl. Opt. 1979, 18, 3587–3594. [Google Scholar] [CrossRef] [PubMed]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanre, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Mills, S.; Jacobson, E.; Jaron, J.; McCarthy, J.; Ohnuki, T.; Plonski, M.; Searcy, D.; Weiss, S. Calibration of the VIIRS Day/Night Band (DNB). In Proceedings of the American Meteorological Society 6th Annual Symposium on Future National Operational Environmental Satellite Systems-NPOESS and GOES-R, 2010, Atlanta, GA, USA, 16–21 January 2010; Volume 9, pp. 1–9. [Google Scholar]
- Taylor, J. Introduction to Error Analysis, the Study of Uncertainties in Physical Measurements, 2nd ed.; University Science Books: Sausalito, CA, USA, 1982; pp. 60–61. ISBN 0-935702-42-3. [Google Scholar]
- Chrien, T.G.; Green, R.O.; Eastwood, M.L. Accuracy of the spectral and radiometric laboratory calibration of the Airborne Visible/Infrared Imaging Spectrometer. In Imaging Spectroscopy of the Terrestrial Environment; International Society for Optics and Photonics: Orlando, FL, USA, 1990; Volume 1298, pp. 37–50. [Google Scholar] [CrossRef]
- Mighell, K.J. Algorithms for CCD stellar photometry. In Astronomical Data Analysis Software and Systems VIII; Astronomical Society of the Pacific: San Fransisco, CA, USA, 1999; Volume 172, pp. 317–328. ISBN 1-886733-94-5. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameter | NOAA Provided Performance Goal | Updated Performance Goal |
|---|---|---|
| Effective radiance output | > Lmin (3 × 10−9 W cm−2 sr−1) | > Lmin (1 × 10−8 W cm−2 sr−1) (achieved 2.5 × 10−8 W cm−2 sr−1) |
| Corrected systematic drift | < 1% | < 1% |
| TOA absolute radiometric accuracy (SI traceable) | Accurate to within 5% (with good atmospheric knowledge) | Accurate to within 5% (with good atmospheric knowledge) |
| Viewing angle | ± 10° | ± 30° |
| HGS DNB Characteristics | Prelaunch Performance | On-Orbit Performance |
|---|---|---|
| Orbit (Polar) | N/A | 827 km alt, 98° |
| Swath (±56°) | N/A | 3000 km |
| Nighttime Equator Crossing | N/A | 1:30 AM |
| Spectral Bandpass Center | 707 nm | Model estimate center 694 nm |
| Spectral Bandpass Bandwidth | 379 nm | Model estimate 375 nm |
| Horizontal Sample Interval | 742 m scan 742 m track | 704–790 m scan, 734–777 m track |
| Horizontal Spatial Resolution (HSR) | <820 m scan, <670 m track MTF(1/(2*HSR)) = 0.5 | <750 m <52° scan, <750 m <52° track MTF(1/(2*HSR)) = 0.52 |
| HGS Lmin | 3 × 10−9 W cm−2 sr−1 | 3 × 10−9 W cm−2 sr−1 |
| HGS calibration accuracy | 11% | 15% (1σ) |
| SNR @ HGS Lmin | SNR >10 @ end of scan or approx. 40 at nadir | SNR>9 across scan after degradation |
| Stray light | N/A | >100% Lmin, approx. 15% Lmin after corr. |
| Term | Contribution Term | Estimated Uncertainty (%) | Comment/Justification |
|---|---|---|---|
| Radiance standard | 2 | Conservative estimate for commercially available calibration spheres in the visible range | |
| Transfer uncertainty | 1–3 | Conservative estimate. Round robin needed to verify | |
| Spectrometer stability | 1–2 | Measurements of similar spectrometers by authors | |
| Sphere exit port area | <0.5 | Analysis of manufacturing tolerances. Sphere exit port is machined to approx. 250 micron tolerance | |
| Sphere and trailer window transmission | 1–2 | Analysis of Fresnel equations for unpolarized radiation, average 30° cone and assumption that windows are periodically cleaned | |
| Pointing | 0.5–1 | Analysis of leveling error (1–2°) and assumption that periodic leveling will be needed | |
| VIIRS GSD | 1 | Subpixel aggregation is used to minimize GSD variations. Known GSD used for measurement | |
| RSS | 3–5 | Total ground source radiance | |
| 1 | For clear conditions and relatively low reflectance background the uncertainty in the multiple scatter should be < 1%. May be larger at bright sites | ||
| 3 | Assumes Terra Vega is fielded under clear conditions and near atmospheric monitoring. Based on models and predictions. Will be much larger without clear conditions and monitoring. | ||
| <1 | Active source much larger than background radiance. Measured background is measured and subtracted and includes VIIRS residual stray light | ||
| SNR | 1–2 | For the Terra Vega radiance level, the VIIRS DNB HGS has a SNR approx. 100 at nadir. | |
| 5–6 | RMS |
| Satellite | Elevation Angle (max) | Date | Overpass Time | Location | Visibility at Overpass | Available Power | Purpose |
|---|---|---|---|---|---|---|---|
| Suomi NPP | 88.60° | 3/23/17 | 7:44:38 UTC | Picayune, MS | Clear | Generator | Feasibility |
| Suomi NPP | 75.26° | 9/28/17 | 8:38:28 UTC | Arlington, SD | Clear | Wall power | Calibration |
| Suomi NPP | 76.76° | 9/29/17 | 8:19:41 UTC | Arlington, SD | Thin cirrus present | Wall power | Calibration |
| Suomi NPP | 86.68° | 10/20/17 | 8:25:59 UTC | Arlington, SD | Clear | Wall power | Calibration |
| NOAA-20 | 66.55° | 8/11/18 | 8:43:37 UTC | Arlington, SD | Clear | Wall power | Calibration |
| NOAA-20 | 84.19° | 8/17/18 | 8:31:08 UTC | Arlington, SD | Clear | Wall power | Calibration |
| NOAA-20 | 74.99° | 8/22/18 | 8:37:25 UTC | Arlington, SD | Clear | Wall power | Calibration |
| Satellite | Date | VIIRS Summed Target Radiance [Wcm−2sr−1] | VIIRS Average Background Radiance [Wcm−2sr−1] | VIIRS Total Target Radiance [Wcm−2sr−1] |
|---|---|---|---|---|
| Suomi NPP | 9/28/17 | 2.52 × 10−8 | 3.32 × 10−10 | 2.49 × 10−8 |
| Suomi NPP | 9/29/17 | 1.78 × 10−8 | 3.76 × 10−10 | 1.74 × 10−8 |
| Suomi NPP | 10/20/17 | 2.26 × 10−8 | 5.42 × 10−10 | 2.20 × 10−8 |
| NOAA-20 | 8/11/18 | 1.42 × 10−8 | 9.38 × 10−11 | 1.41 × 10−8 |
| NOAA-20 | 8/17/18 | 2.10 × 10−8 | 1.81 × 10−10 | 2.08 × 10−8 |
| NOAA-20 | 8/22/18 | 2.43 × 10−8 | 3.04 × 10−10 | 2.40 × 10−8 |
| Satellite | Date | Atmosphere | Visibility | Water Vapor | Ozone |
|---|---|---|---|---|---|
| Suomi NPP | 9/28/17 | MLW | 150 km | 0.694 g cm−2 | 8.04 g m−2 |
| Suomi NPP | 9/29/17 | MLW | 150 km | 1.163 g cm−2 | 8.04 g m−2 |
| Suomi NPP | 10/20/17 | MLW | 75 km | 1.163 g cm−2 | 8.04 g m−2 |
| NOAA-20 | 8/11/18 | MLS | 11 km | 2.922 g cm−2 | 7.10 g m−2 |
| NOAA-20 | 8/17/18 | MLS | 27 km | 4.504 g cm−2 | 14.14 g m−2 |
| NOAA-20 | 8/22/18 | MLS | 33 km | 2.922 g cm−2 | 7.102 g m−2 |
| Satellite | Date | VIIRS Total Target Radiance [Wcm−2sr−1] | TOA Terra Vega Radiance [Wcm−2sr−1] | % Difference [Wcm−2sr−1] |
|---|---|---|---|---|
| Suomi NPP | 9/28/17 | 2.49 × 10−8 | 2.42 × 10−8 | 2.8% |
| Suomi NPP | 9/29/17 | 1.74 × 10−8 | 2.45 × 10−8 | −40.8% |
| Suomi NPP | 10/20/17 | 2.20 × 10−8 | 2.44 × 10−8 | −10.9% |
| Mean (excluding 9/29/17) | −4.1% | |||
| Satellite | Date | VIIRS Total Target Radiance [Wcm−2sr−1] | TOA Terra Vega Radiance [Wcm−2sr−1] | % Difference [Wcm−2sr−1] |
|---|---|---|---|---|
| NOAA-20 | 8/11/18 | 1.41 × 10−8 | 1.50 × 10−8 | −6.4% |
| NOAA-20 | 8/17/18 | 2.08 × 10−8 | 2.06 × 10−8 | 1.0% |
| NOAA-20 | 8/22/18 | 2.40 × 10−8 | 2.24 × 10−8 | 6.7% |
| Mean | 0.4% | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryan, R.E.; Pagnutti, M.; Burch, K.; Leigh, L.; Ruggles, T.; Cao, C.; Aaron, D.; Blonski, S.; Helder, D. The Terra Vega Active Light Source: A First Step in a New Approach to Perform Nighttime Absolute Radiometric Calibrations and Early Results Calibrating the VIIRS DNB. Remote Sens. 2019, 11, 710. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060710
Ryan RE, Pagnutti M, Burch K, Leigh L, Ruggles T, Cao C, Aaron D, Blonski S, Helder D. The Terra Vega Active Light Source: A First Step in a New Approach to Perform Nighttime Absolute Radiometric Calibrations and Early Results Calibrating the VIIRS DNB. Remote Sensing. 2019; 11(6):710. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060710
Chicago/Turabian StyleRyan, Robert E., Mary Pagnutti, Kara Burch, Larry Leigh, Timothy Ruggles, Changyong Cao, David Aaron, Slawomir Blonski, and Dennis Helder. 2019. "The Terra Vega Active Light Source: A First Step in a New Approach to Perform Nighttime Absolute Radiometric Calibrations and Early Results Calibrating the VIIRS DNB" Remote Sensing 11, no. 6: 710. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11060710