Establishment and Assessment of a New GNSS Precipitable Water Vapor Interpolation Scheme Based on the GPT2w Model


Abstract
:
1. Introduction
2. GPT2w Model and Interpolation Method
2.1. PWV Derived from GNSS and the GPT2w Model
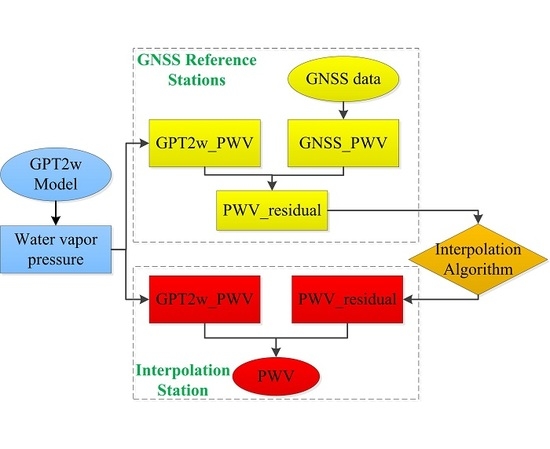
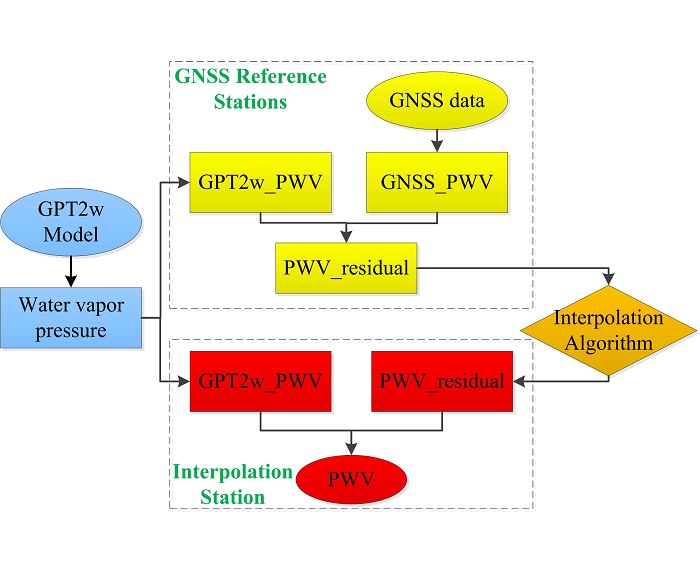
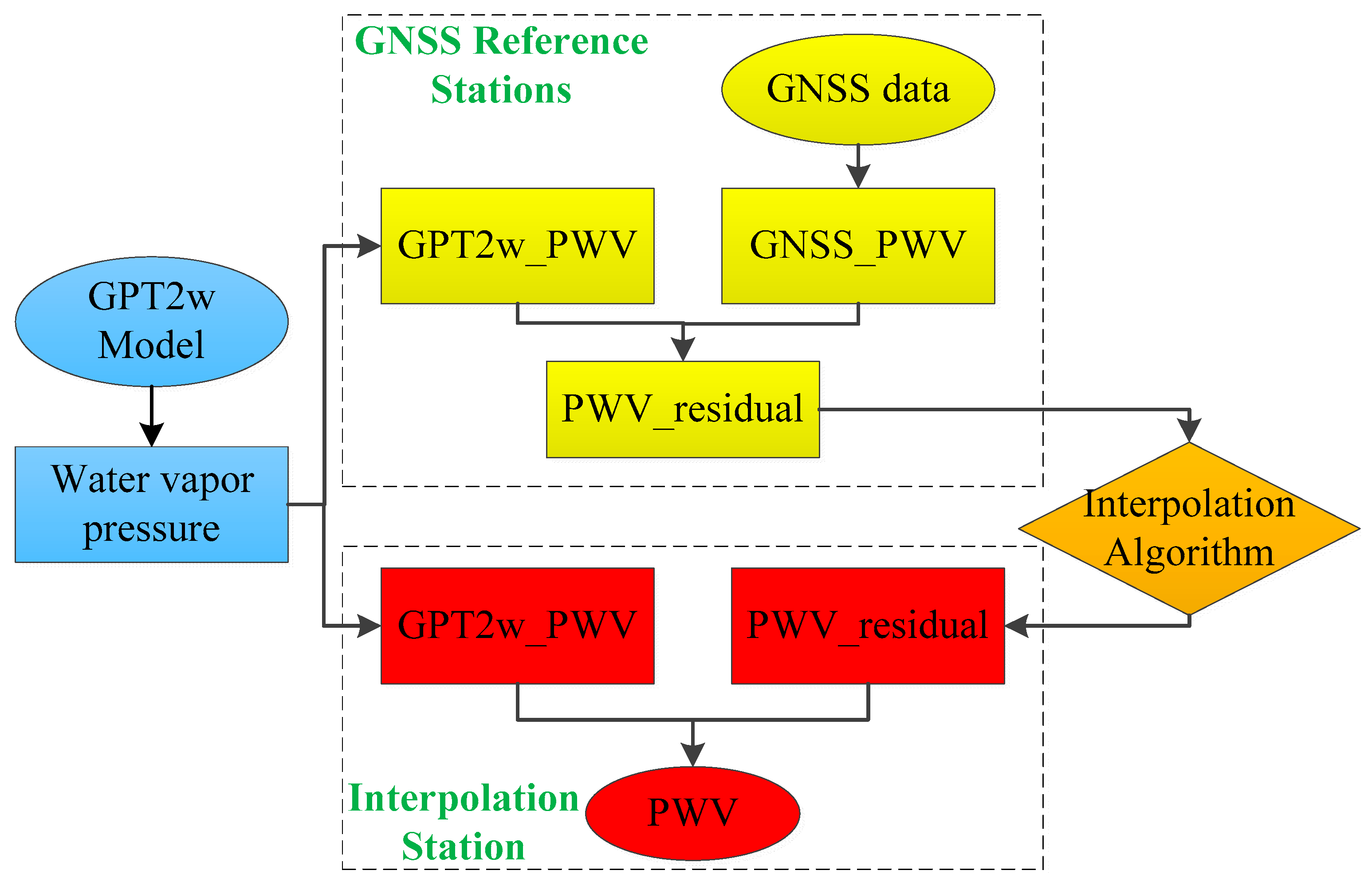
2.2. Interpolation Algorithm
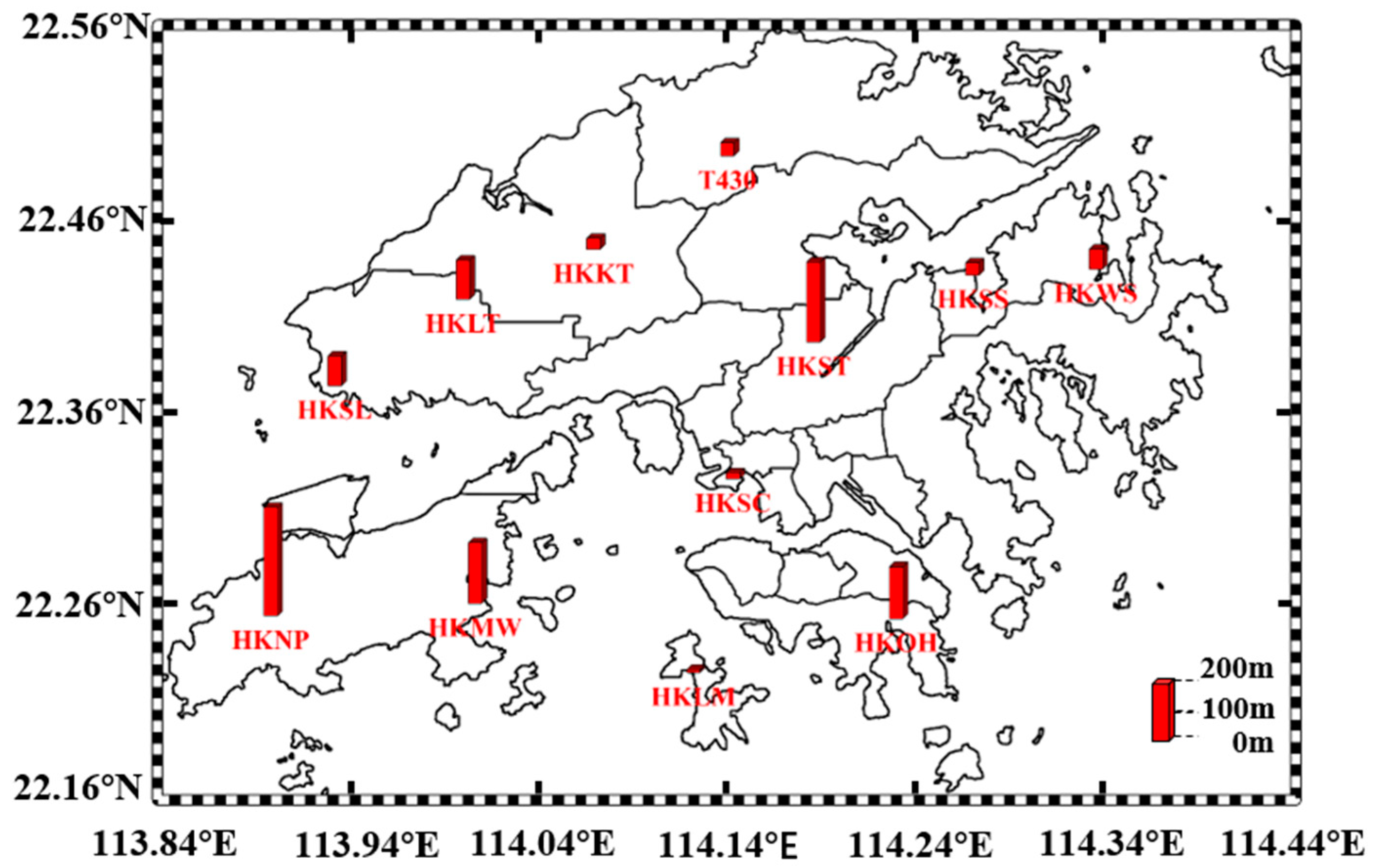
3. Experimental Description
4. Result and Discussion
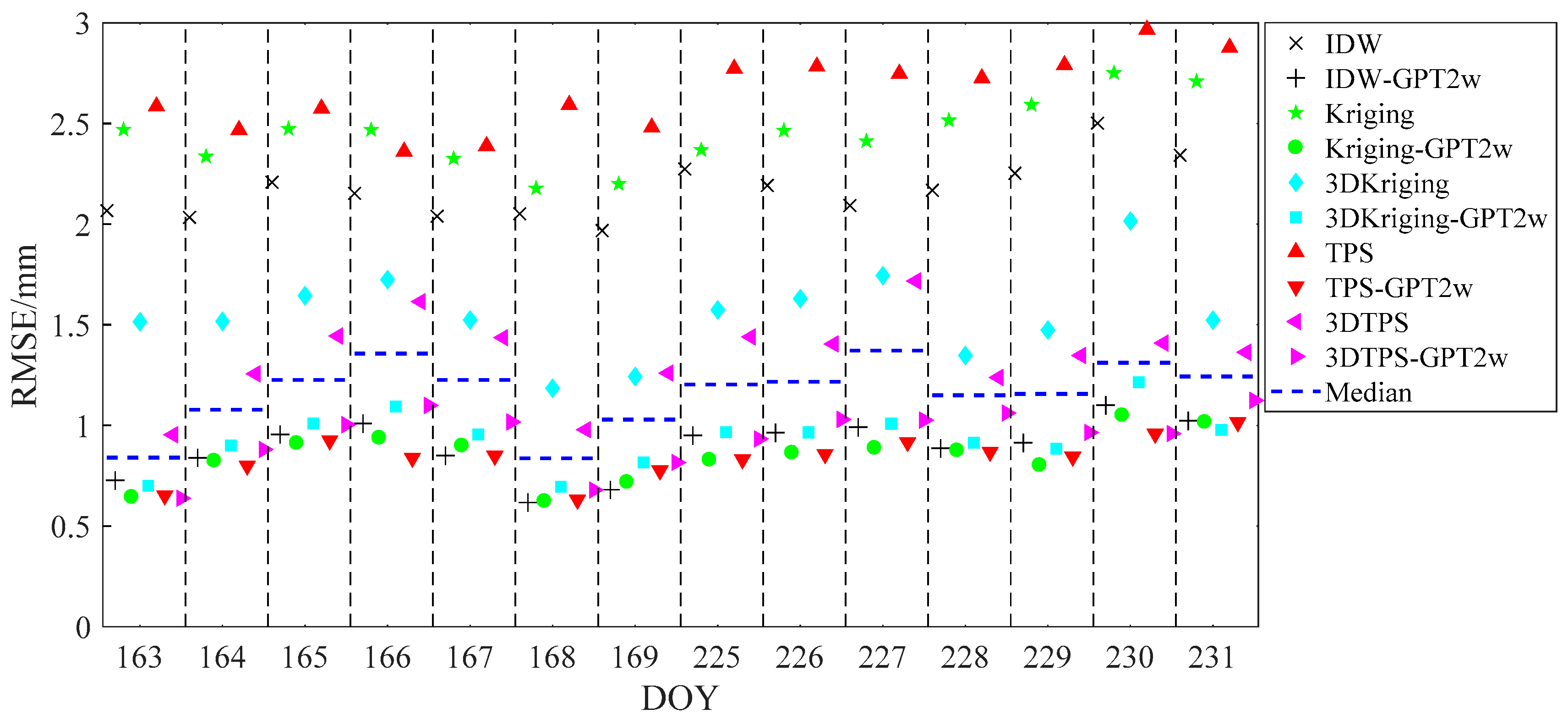
4.1. Station Cross-Validation
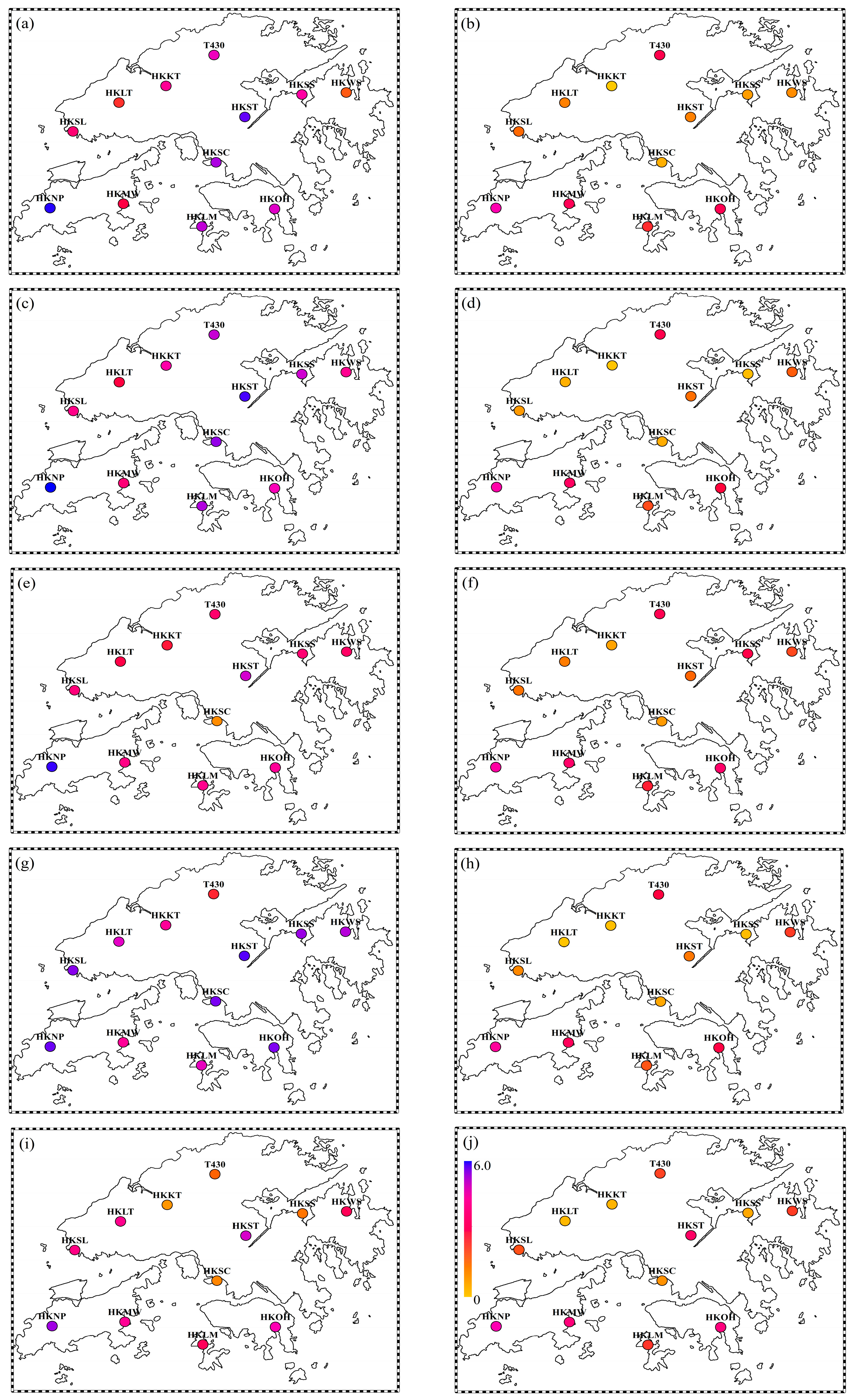
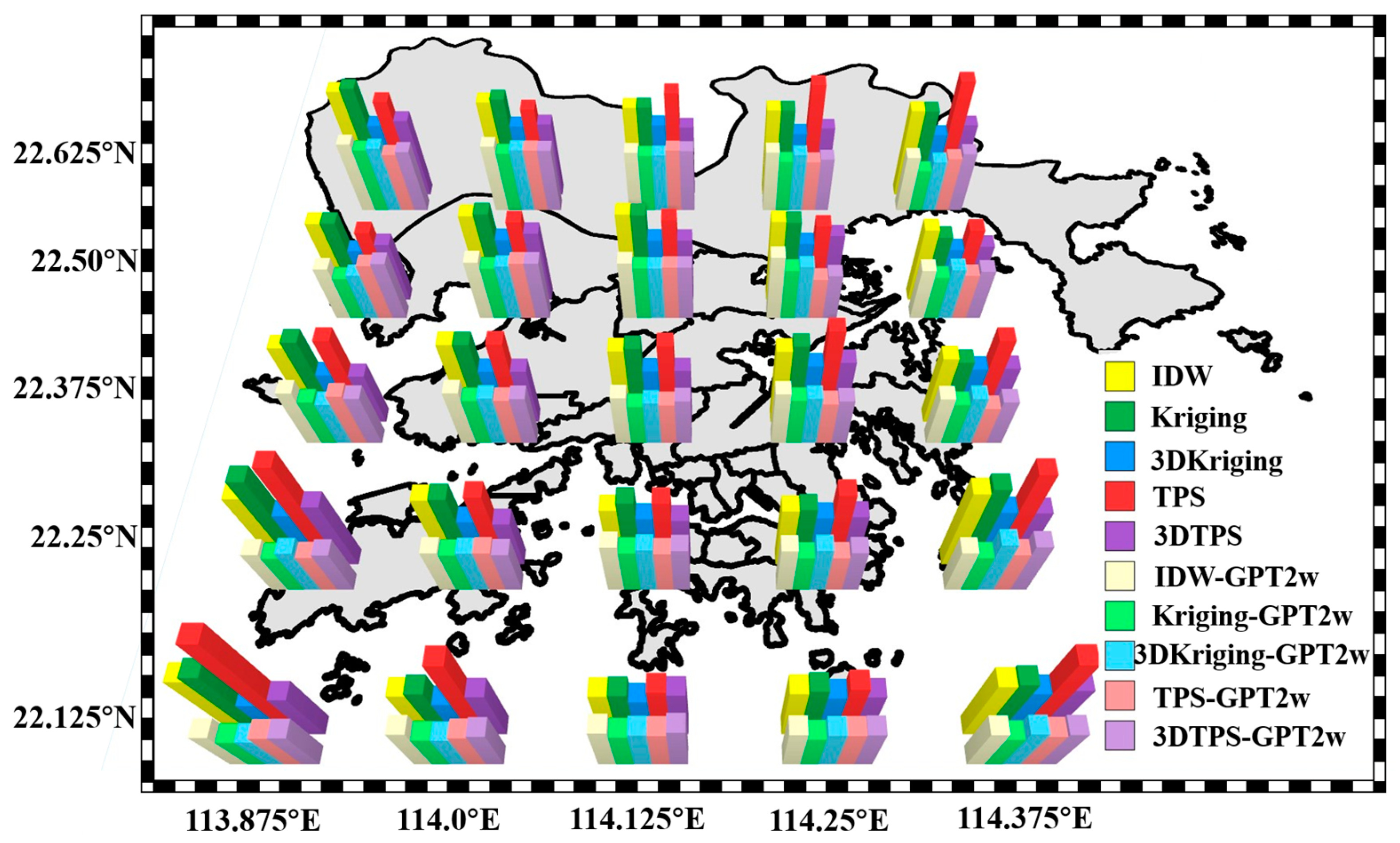
4.2. Grid Data Validation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the Global Positioning System. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Rocken, C.; Ware, R.; Hove, T.V.; Solheim, F.; Alber, C.; Johnson, J.; Bevis, M.; Businger, S. Sensing atmospheric water vapor with the global positioning system. Geophys. Res. Lett. 1993, 20, 2631–2634. [Google Scholar] [CrossRef]
- Nilsson, T.; Gadinarsky, L.; Elgered, G. GPS tomography using phase observations. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 2756–2759. [Google Scholar]
- Perler, D.; Geiger, A.; Hurter, F. 4D GPS water vapor tomography: New parameterized approaches. J. Geod. 2011, 85, 539–550. [Google Scholar] [CrossRef]
- Guo, J.; Yang, F.; Shi, J.; Xu, C. An optimal weighting method of Global Positioning System (GPS) troposphere tomography. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5880–5887. [Google Scholar] [CrossRef]
- Emardson, T.R.; Johansson, J.M. Spatial interpolation of the atmospheric water vapor content between sites in a ground-based GPS Network. Geophys. Res. Lett. 1998, 25, 3347–3350. [Google Scholar] [CrossRef]
- Suparta, W.; Rahman, R. Spatial interpolation of GPS PWV and meteorological variables over the west coast of Peninsular Malaysia during 2013 Klang Valley Flash Flood. Atmos. Res. 2016, 168, 205–219. [Google Scholar] [CrossRef]
- Sibson, R. A brief description of natural neighbour interpolation. In Interpreting Multivariate Data; Barnett, V., Ed.; John Wiley: New York, NY, USA, 1981; pp. 21–36. [Google Scholar]
- Shepard, D.S. Computer Mapping: The SYMAP interpolation algorithm. Spat. Stat. Models 1984, 40, 133–145. [Google Scholar]
- Hewitson, B.; Crane, R. Self-organizing maps: Applications to synoptic climatology. Clim. Res. 2002, 22, 13–26. [Google Scholar] [CrossRef]
- Jarlemark, P.; Emardson, T.R. Strategies for spatial and temporal extrapolation and interpolation of zenith wet delay. J. Geod. 1998, 72, 350–355. [Google Scholar] [CrossRef]
- Janssen, V.; Ge, L.; Rizos, C. Tropospheric correction to SAR interferometry from GPS observations. GPS Solut. 2004, 8, 140–151. [Google Scholar] [CrossRef]
- Yin, H.; Dang, Y.; Xue, S.; Nie, J. An interpolation method for zenith tropospheric delay based on higher taylor series expansion. J. Geod. Geodyn. 2013, 33, 155–159. (In Chinese) [Google Scholar]
- Yang, S.; Zhang, Q.; Zhang, S.; Zhao, C. Research on GPS water vapor interpolation by improved Kriging algorithm. Remote Sens. Land Resour. 2013, 25, 39–43. (In Chinese) [Google Scholar]
- Vicente-Serrano, S.; Saz-Sanchez, M.; Cuadrat, J. Comparative analysis of interpolation methods in the middle Ebro Valley (Spain): Application to annual precipitation and temperature. Clim. Res. 2003, 24, 161–180. [Google Scholar] [CrossRef]
- Li, Z.; Fielding, E.; Cross, P.; Muller, J. Interferometric synthetic aperture radar atmospheric correction: GPS topography dependent turbulence model. J. Geophys. Res. Solid Earth 2006, 111, B02404. [Google Scholar] [CrossRef]
- Li, Z.; Ding, X.; Huang, C.; Wadge, G.; Zheng, D. Modeling of atmospheric effects on InSAR measurements by incorporating terrain elevation information. J. Atoms. Sol. Terres. Phys. 2006, 68, 1189–1194. [Google Scholar] [CrossRef]
- Xu, W.; Li, Z.; Ding, X.; Zhu, J. Interpolating atmospheric water vapor delay by incorporating terrain elevation information. J. Geod. 2011, 85, 555–564. [Google Scholar] [CrossRef]
- Onn, F.; Zebker, H.A. Correction for interferometric synthetic aperture radar atmospheric phase artifacts using time series of zenith wet delay observations from a GPS network. J. Geophys. Res Solid Earth 2006, 111, B09102. [Google Scholar] [CrossRef]
- Bohm, J.; Moller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere. GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Bevis, M. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Yang, F.; Guo, J.; Shi, J.; Zhou, L.; Xu, Y.; Chen, M. A Method to Improve the Distribution of Observations in GNSS Water Vapor Tomography. Sensors 2018, 18, 2526. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Y.; Liu, J. Determination of weighted mean tropospheric temperature using ground meteorological measurement. Geo-Spat. Inf. Sci. 2001, 4, 14–18. [Google Scholar]
- Yao, Y.; Zhu, S.; Yue, S. A globally applicable, season-specific model for estimating the weighted mean temperature of the atmosphere. J. Geod. 2012, 86, 1125–1135. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar]
- Karalis, J.D. Precipitable Water and Its Relationship to Surface Dew Point and Vapor Pressure in Athens. J. Appl. Meteorol. 1974, 13, 760–766. [Google Scholar] [CrossRef]
- Cole, R.J. Direct solar radiation data as input into mathematical models describing the thermal performance of buildings—II. Development of relationships. Build. Sci. 1976, 11, 181–186. [Google Scholar] [CrossRef]
- Li, C.; Wei, H.; Liu, H.; Zhou, J. Statistics of Correlation of Integrated Water Vapor and Surface Vapor Pressure. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 1170–1173. [Google Scholar]
- Reber, E.; Swope, J. On the correlation of the total precipitable water in a vertical column and absolute humidity at the surface. J. Appl. Meteorol. 1972, 11, 1322–1325. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, D.; Zhuang, D. An operational approach for estimating surface vapor pressure with satellite-derived parameter. Afr. J. Agric. Res. 2010, 5, 2817–2824. [Google Scholar]
- Zhang, X. A relationship between precipitable water vapor and surface vapor pressure. Meteorol. Mon. 2004, 30, 9–11. (In Chinese) [Google Scholar]
- Camera, C.; Bruggeman, A.; Hadjinicolaou, P.; Pashiardis, S.; Lange, M. Evaluation of interpolation techniques for the creation of gridded daily precipitation (1 × 1 km2); Cyprus, 1980–2010. J. Geophys. Res. Atmos. 2014, 119, 693–712. [Google Scholar] [CrossRef]
- Krige, D. A statistical approach to some basic mine valuation problems on the Witwatersrand. J. Chem. Metall. Min. Soc. S. Afr. 1951, 52, 119–139. [Google Scholar]
- Krige, D. Two-dimensional weighted moving average trend surfaces for ore evaluation. J. S. Afr. Inst. Min. Metall. 1966, 66, 13–38. [Google Scholar]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Hofstra, N.; Haylock, M.; New, M.; Jones, P.; Frei, C. Comparison of six methods for the interpolation of daily European climate data. J. Geophys. Res. 2008, 113, D21110. [Google Scholar] [CrossRef]
- Webster, R.; Oliver, M. Geostatistics for Environmental Scientists. Statistics in Practice; John Wiley and Sons: Chichester, UK, 2001. [Google Scholar]
- Wahba, G. Spline models for observational data. In CBMS-NSF Regional Conference Series in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1990; Book 59. [Google Scholar]
- Hutchinson, M. Interpolation of rainfall data with thin plate smoothing splines-Part I: Two-dimensional smoothing of data with short range correlation. J. Geogr. Inf. Decis. Anal. 1998, 2, 152–167. [Google Scholar]
- Willmott, C.; Matsuura, K. Smart interpolation of annually averaged air temperature in the United States. J. Appl. Meteorol. 1995, 34, 2577–2586. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Fan, S.; Cheng, Y. Water vapor-weighted mean temperature and its impact on the determination of precipitable water vapor and its linear trend. J. Geophys. Res.-Atmos. 2016, 121, 833–852. [Google Scholar] [CrossRef]
- Willmott, C.; Robeson, S.; Feddema, J. Estimating continental and terrestrial precipitation averages from rain-gauge networks. Int. J. Climatol. 1994, 14, 403–414. [Google Scholar] [CrossRef]
- Price, D.; McKenney, D.; Nalder, I.; Hutchinson, M.; Kesteven, J. A comparison of two statistical methods for spatial interpolation of Canadian monthly mean climate data. Agric. For. Meteorol. 2000, 10, 81–94. [Google Scholar] [CrossRef]
- Daly, C.; Gibson, W.; Taylor, G.; Johnson, G.; Pasteris, P. A knowledge-based approach to the statistical mapping of climate. Clim. Res. 2002, 22, 99–113. [Google Scholar] [CrossRef]
- Hewitson, B.; Crane, R. Gridded area-averaged daily precipitation via conditional interpolation. J. Clim. 2005, 18, 41–57. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rainless Weather | Rainy Weather | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | MAE | # | RMSE | # | CRE | # | MAE | # | RMSE | # | CRE | # |
| [mm] | [mm] | [-] | [mm] | [mm] | [-] | |||||||
| IDW | 2.118 | 8 | 2.285 | 8 | 0.244 | 8 | 1.961 | 8 | 2.010 | 8 | 0.588 | 8 |
| IDW-GPT2w | 0.780 | 3 | 1.004 | 3 | 0.037 | 3 | 0.665 | 3 | 0.838 | 3 | 0.073 | 3 |
| Kriging | 2.373 | 9 | 2.570 | 9 | 0.292 | 9 | 2.204 | 9 | 2.375 | 9 | 0.723 | 10 |
| Kriging-GPT2w | 0.728 | 1 | 0.928 | 2 | 0.032 | 2 | 0.652 | 2 | 0.820 | 2 | 0.070 | 2 |
| 3DKriging | 1.377 | 7 | 1.670 | 7 | 0.132 | 7 | 1.272 | 7 | 1.517 | 7 | 0.343 | 7 |
| 3DKriging-GPT2w | 0.793 | 4 | 1.024 | 4 | 0.038 | 4 | 0.723 | 5 | 0.909 | 4 | 0.082 | 4 |
| TPS | 2.701 | 10 | 2.818 | 10 | 0.312 | 10 | 2.412 | 10 | 2.512 | 10 | 0.685 | 9 |
| TPS-GPT2w | 0.731 | 2 | 0.914 | 1 | 0.032 | 1 | 0.642 | 1 | 0.808 | 1 | 0.067 | 1 |
| 3DTPS | 1.105 | 6 | 1.449 | 6 | 0.081 | 6 | 1.005 | 6 | 1.309 | 6 | 0.193 | 6 |
| 3DTPS-GPT2w | 0.812 | 5 | 1.036 | 5 | 0.039 | 5 | 0.719 | 4 | 0.911 | 5 | 0.087 | 5 |
| Method | MAE | # | RMSE | # | CRE | # |
|---|---|---|---|---|---|---|
| [mm] | [mm] | [-] | ||||
| IDW | 2.459 | 8 | 2.965 | 8 | 0.462 | 8 |
| IDW-GPT2w | 1.640 | 4 | 2.064 | 5 | 0.193 | 5 |
| Kriging | 2.537 | 9 | 3.022 | 9 | 0.472 | 9 |
| Kriging-GPT2w | 1.470 | 1 | 1.791 | 1 | 0.141 | 1 |
| 3DKriging | 1.820 | 6 | 2.192 | 6 | 0.217 | 6 |
| 3DKriging-GPT2w | 1.587 | 2 | 1.895 | 2 | 0.160 | 2 |
| TPS | 2.873 | 10 | 3.310 | 10 | 0.693 | 10 |
| TPS-GPT2w | 1.620 | 3 | 1.929 | 3 | 0.166 | 3 |
| 3DTPS | 1.978 | 7 | 2.373 | 7 | 0.248 | 7 |
| 3DTPS-GPT2w | 1.699 | 5 | 2.007 | 4 | 0.181 | 4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Guo, J.; Meng, X.; Shi, J.; Zhou, L. Establishment and Assessment of a New GNSS Precipitable Water Vapor Interpolation Scheme Based on the GPT2w Model. Remote Sens. 2019, 11, 1127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091127
Yang F, Guo J, Meng X, Shi J, Zhou L. Establishment and Assessment of a New GNSS Precipitable Water Vapor Interpolation Scheme Based on the GPT2w Model. Remote Sensing. 2019; 11(9):1127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091127
Chicago/Turabian StyleYang, Fei, Jiming Guo, Xiaolin Meng, Junbo Shi, and Lv Zhou. 2019. "Establishment and Assessment of a New GNSS Precipitable Water Vapor Interpolation Scheme Based on the GPT2w Model" Remote Sensing 11, no. 9: 1127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11091127