Validation of a Multilag Estimator on NJU-CPOL and a Hybrid Approach for Improving Polarimetric Radar Data Quality


Abstract
:
1. Introduction
2. Materials and Methods
2.1. The NJU-CPOL Radar
2.2. Conventional and Multilag Estimators
- (i)
- Signal Power
- (ii)
- Spectrum Width
- (iii)
- Differential Reflectivity
- (iv)
- Correlation Coefficient
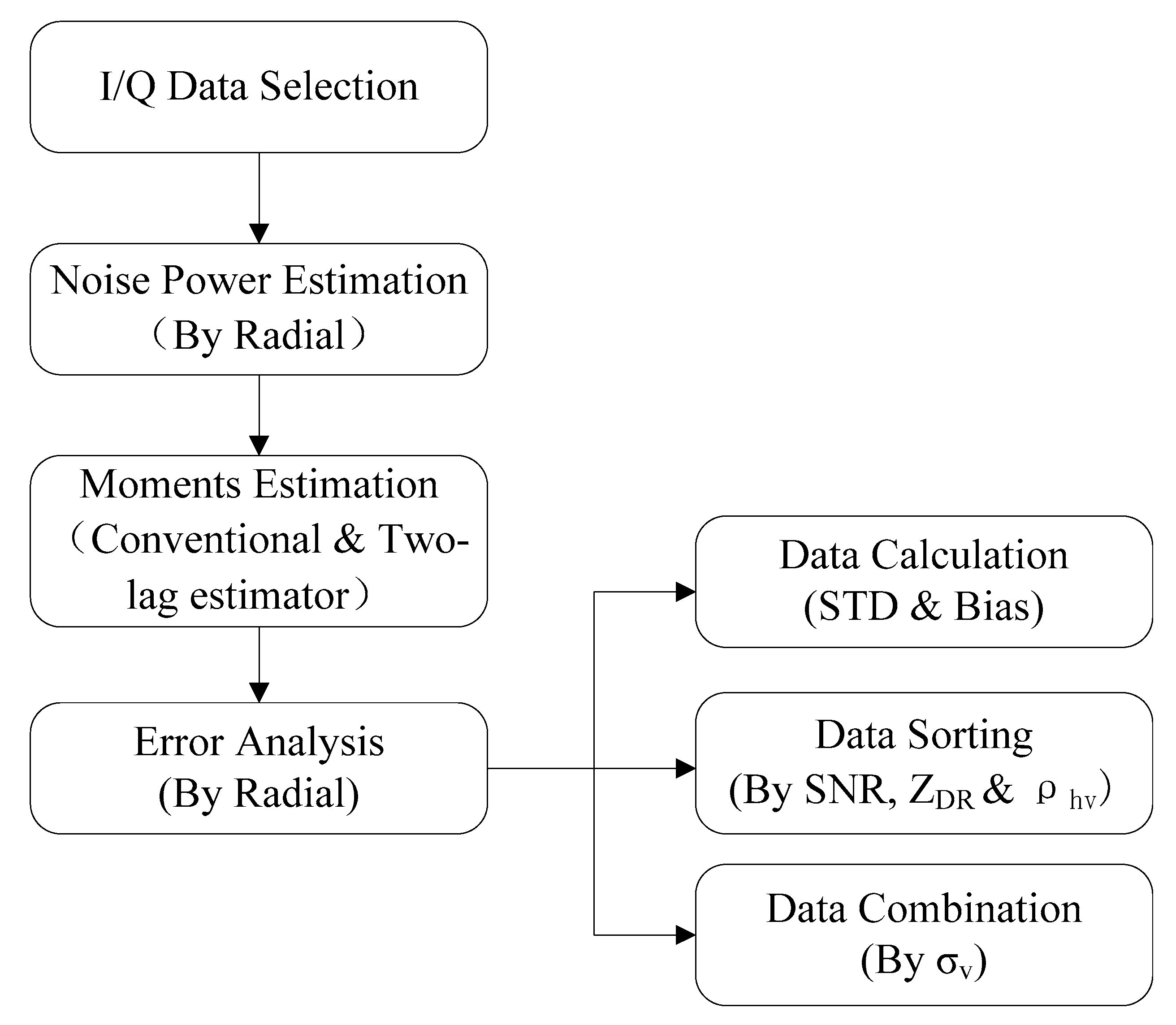
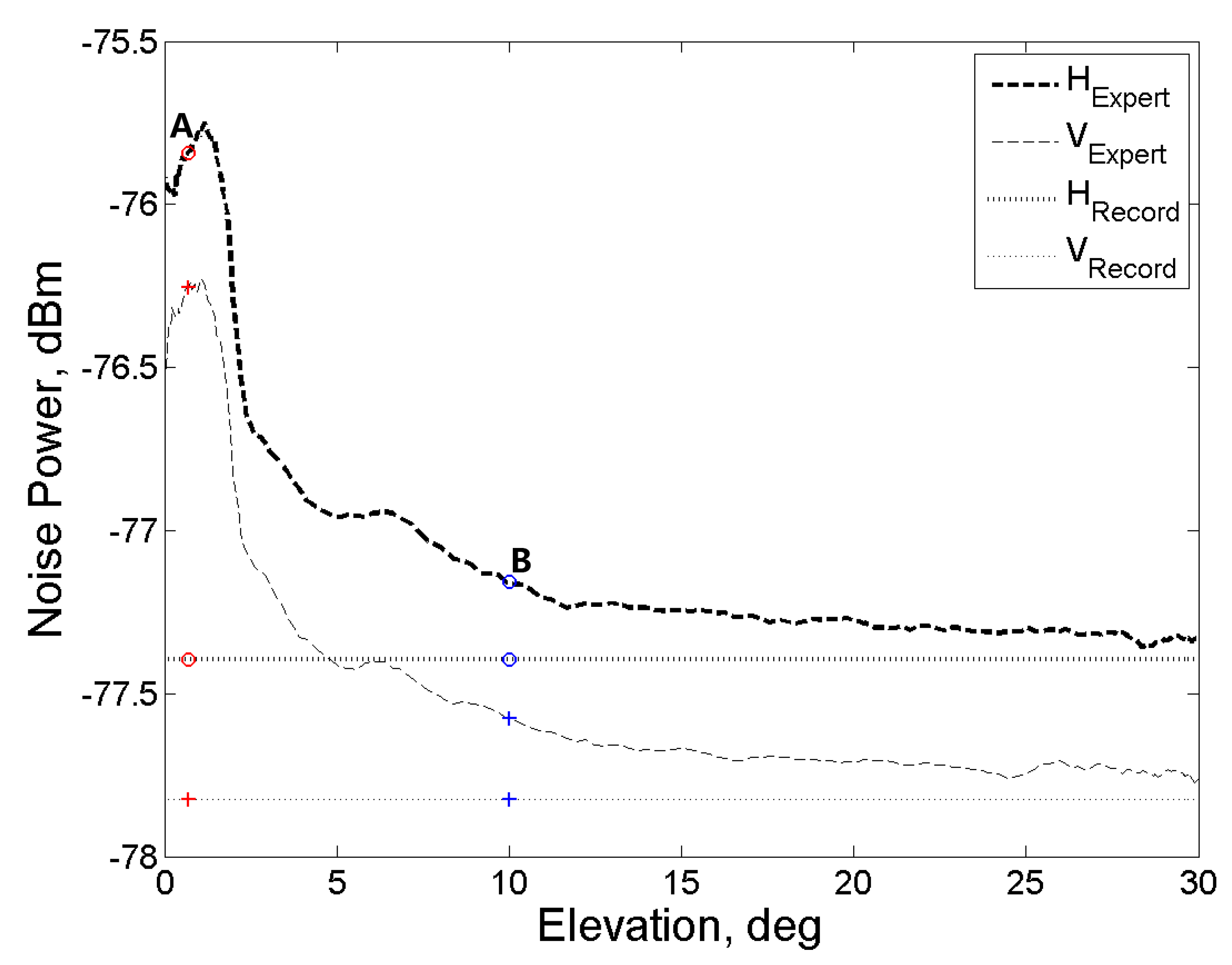
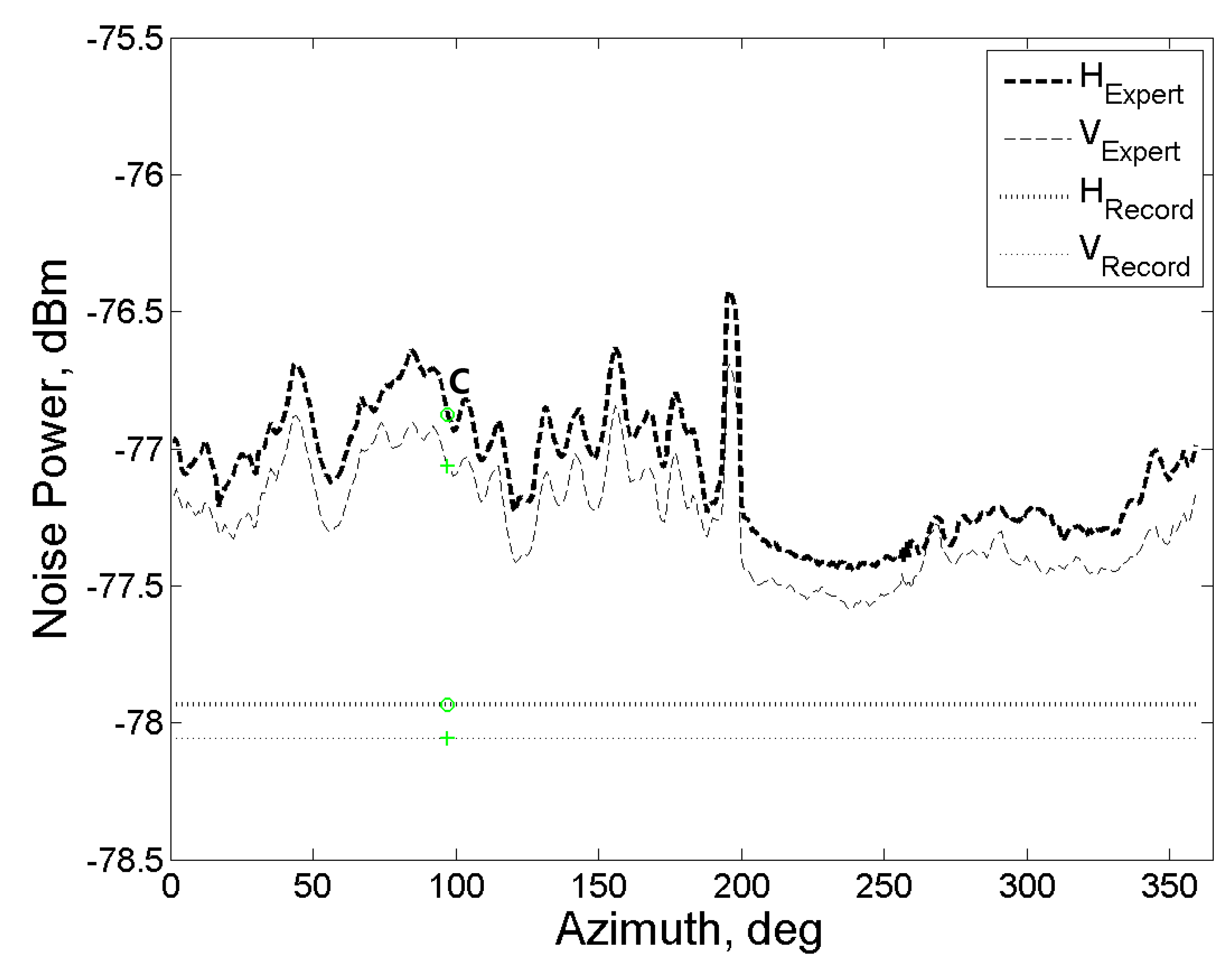
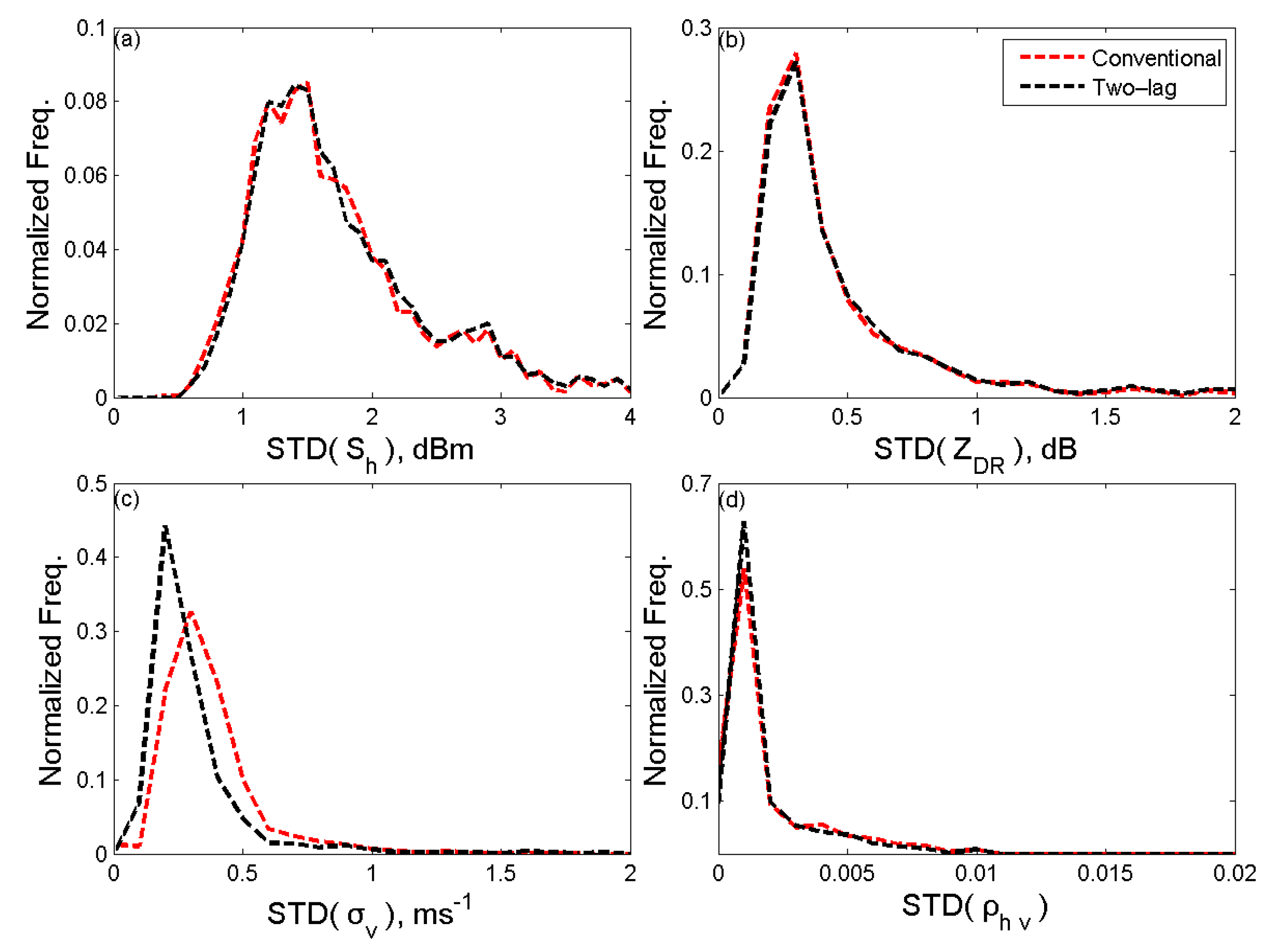
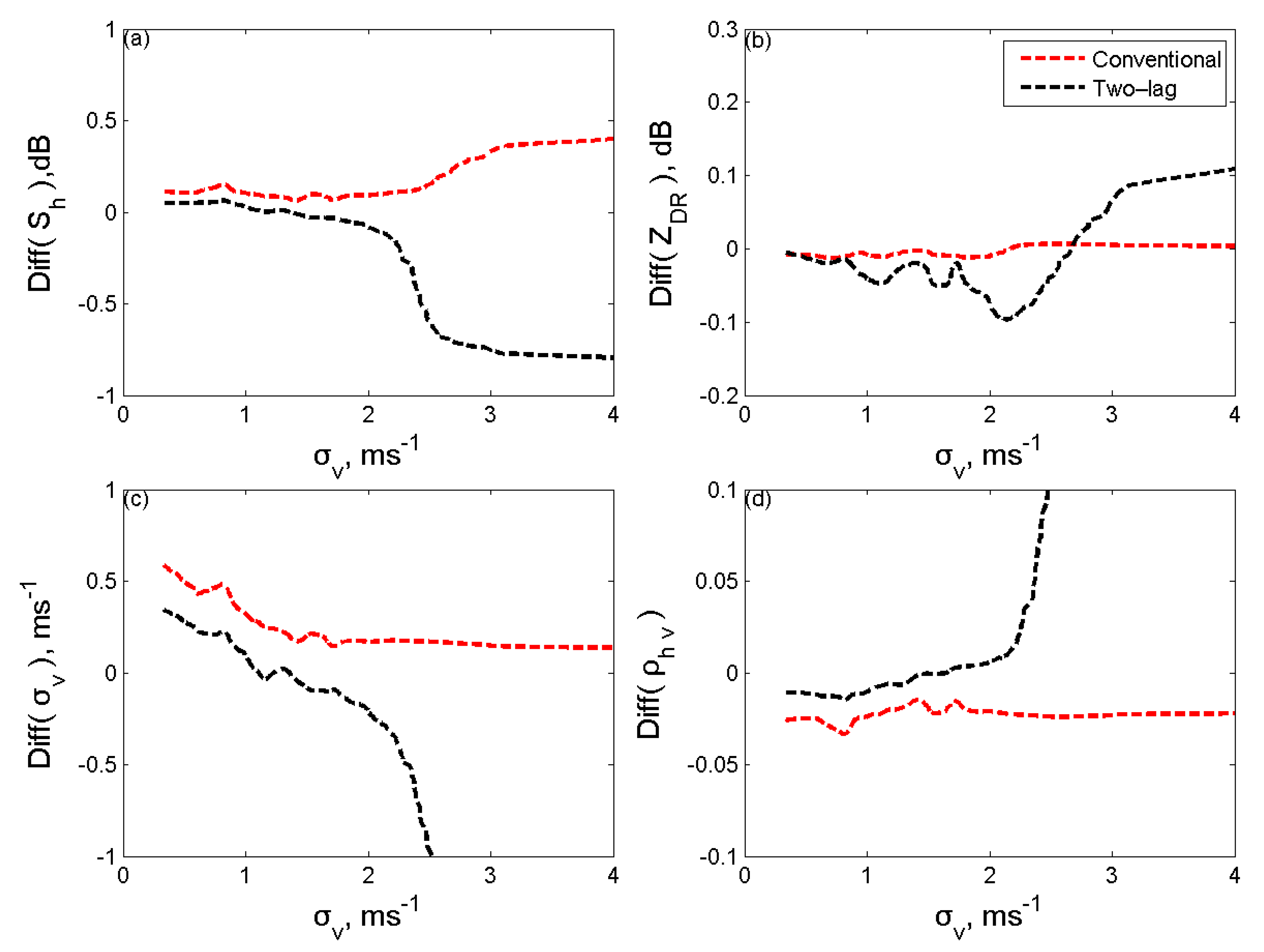
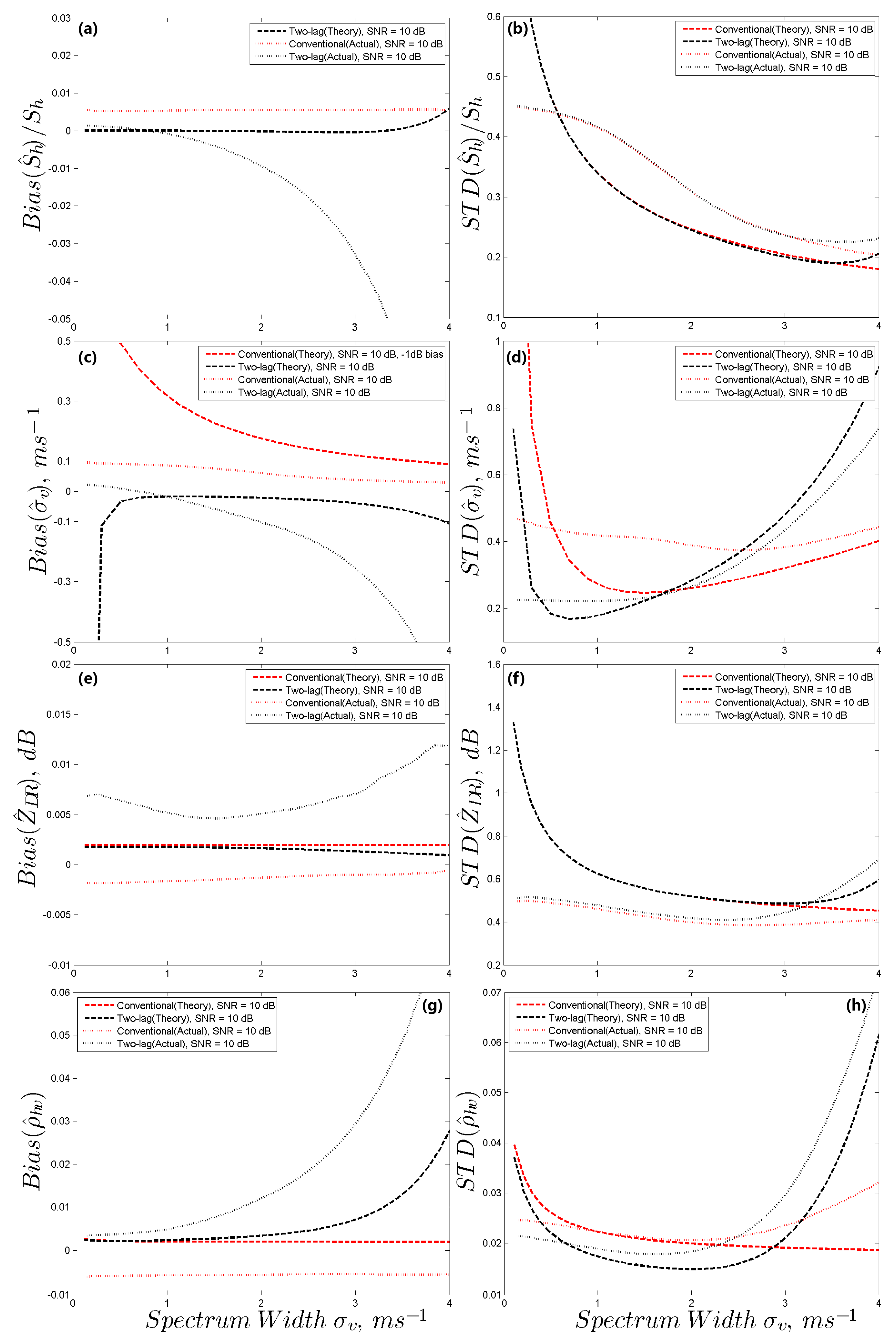
2.3. Error Analysis Method
3. Results
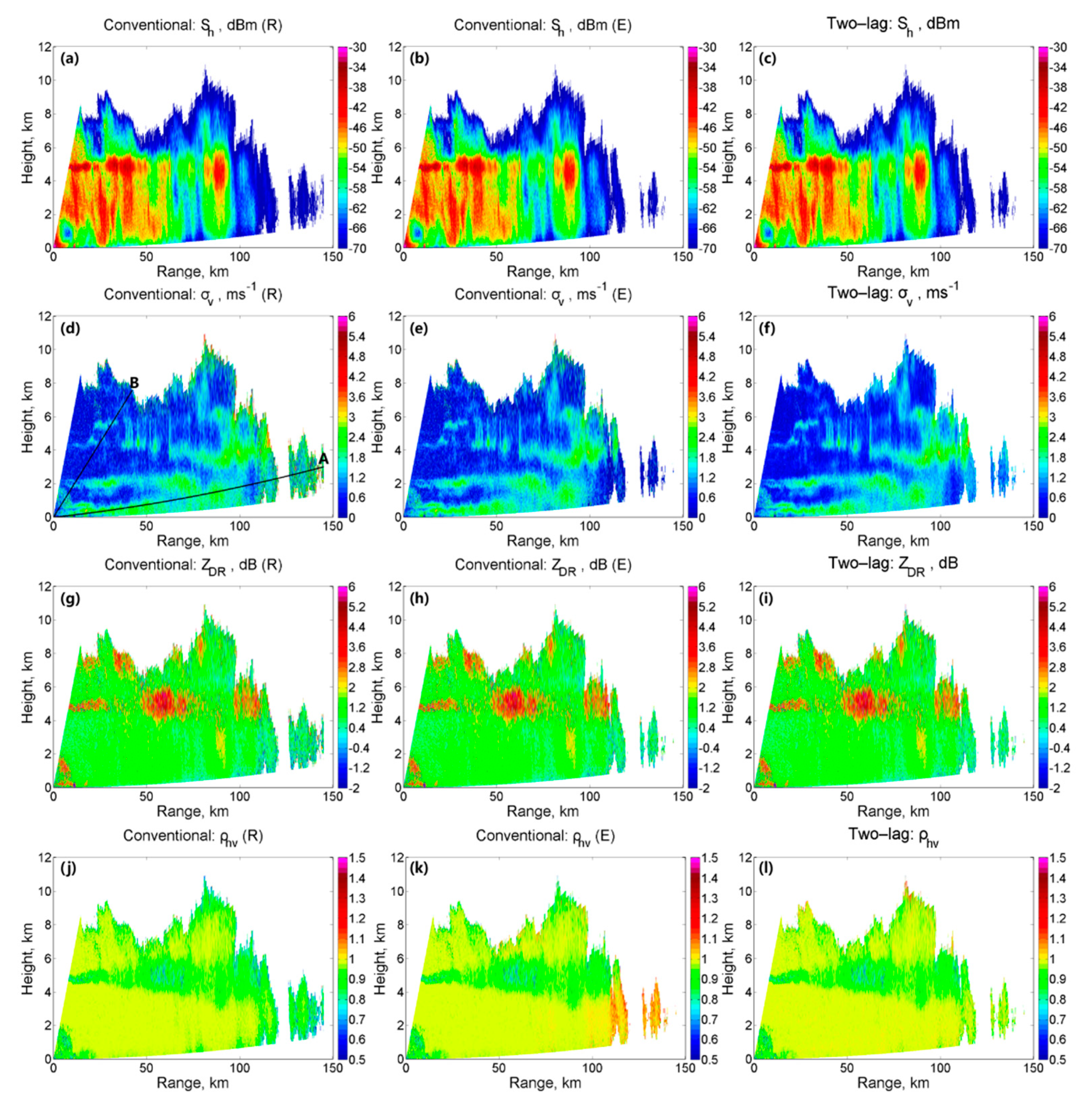
3.1. Case Studies and Results
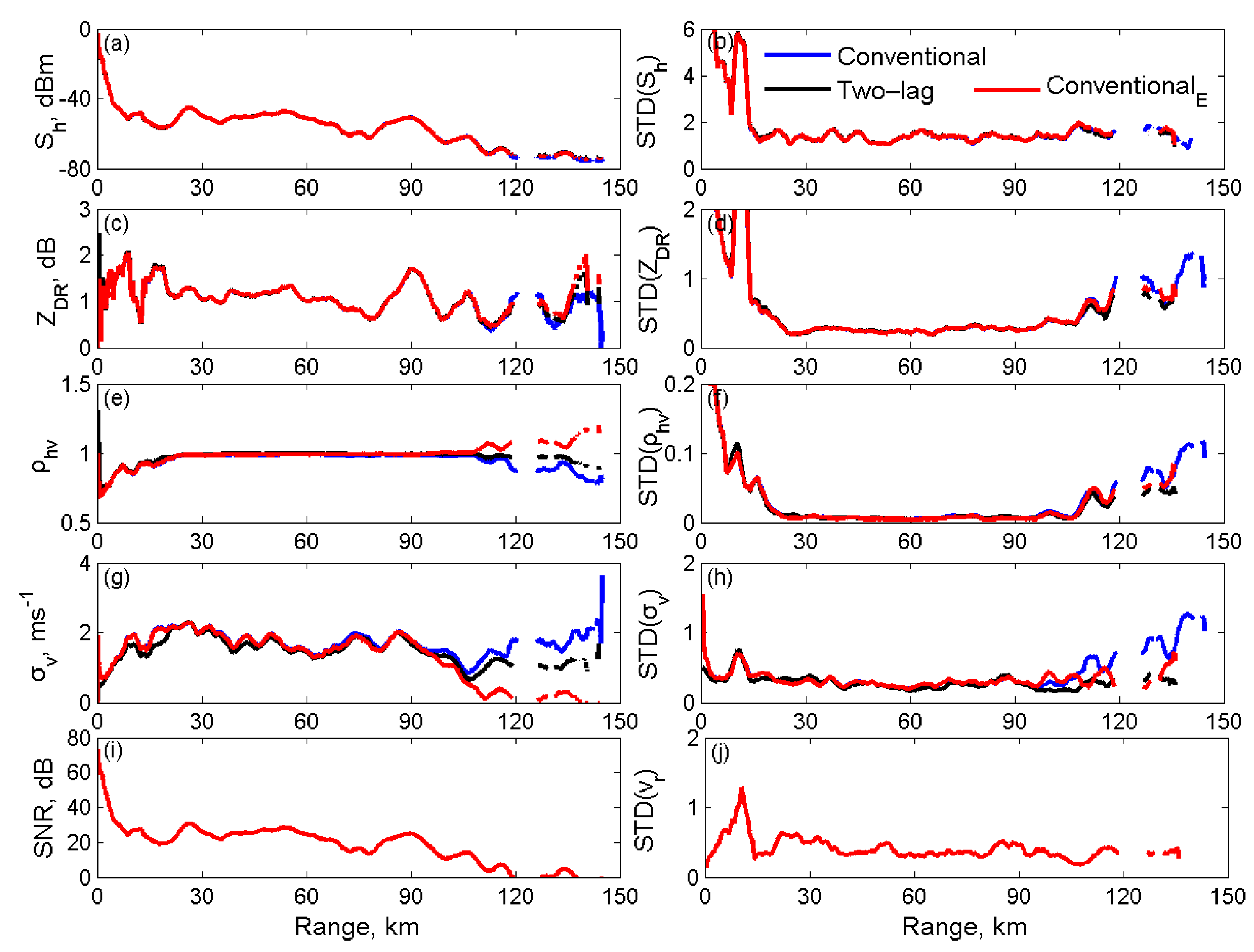
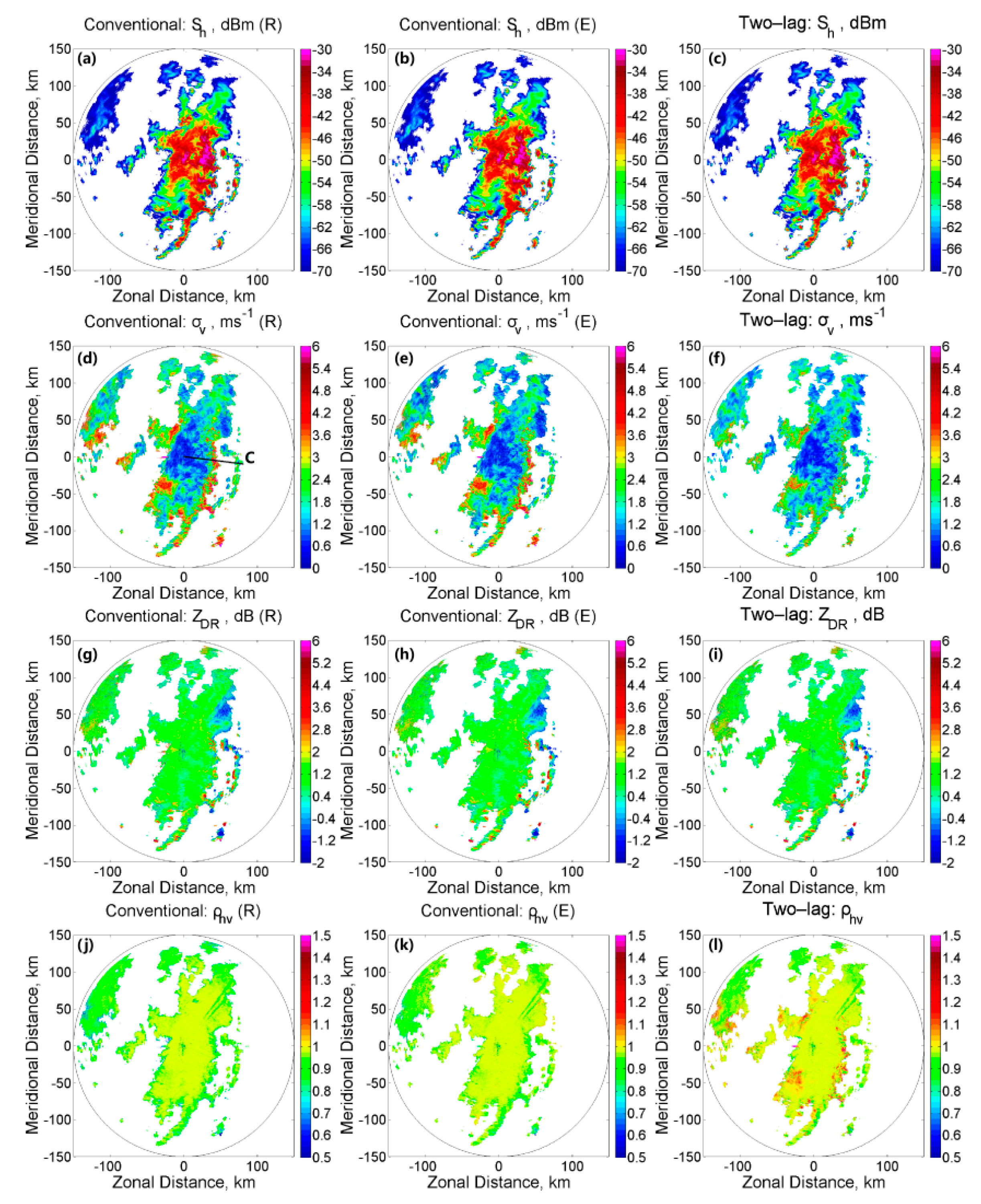
3.1.1. Case 1: Stratiform Precipitation
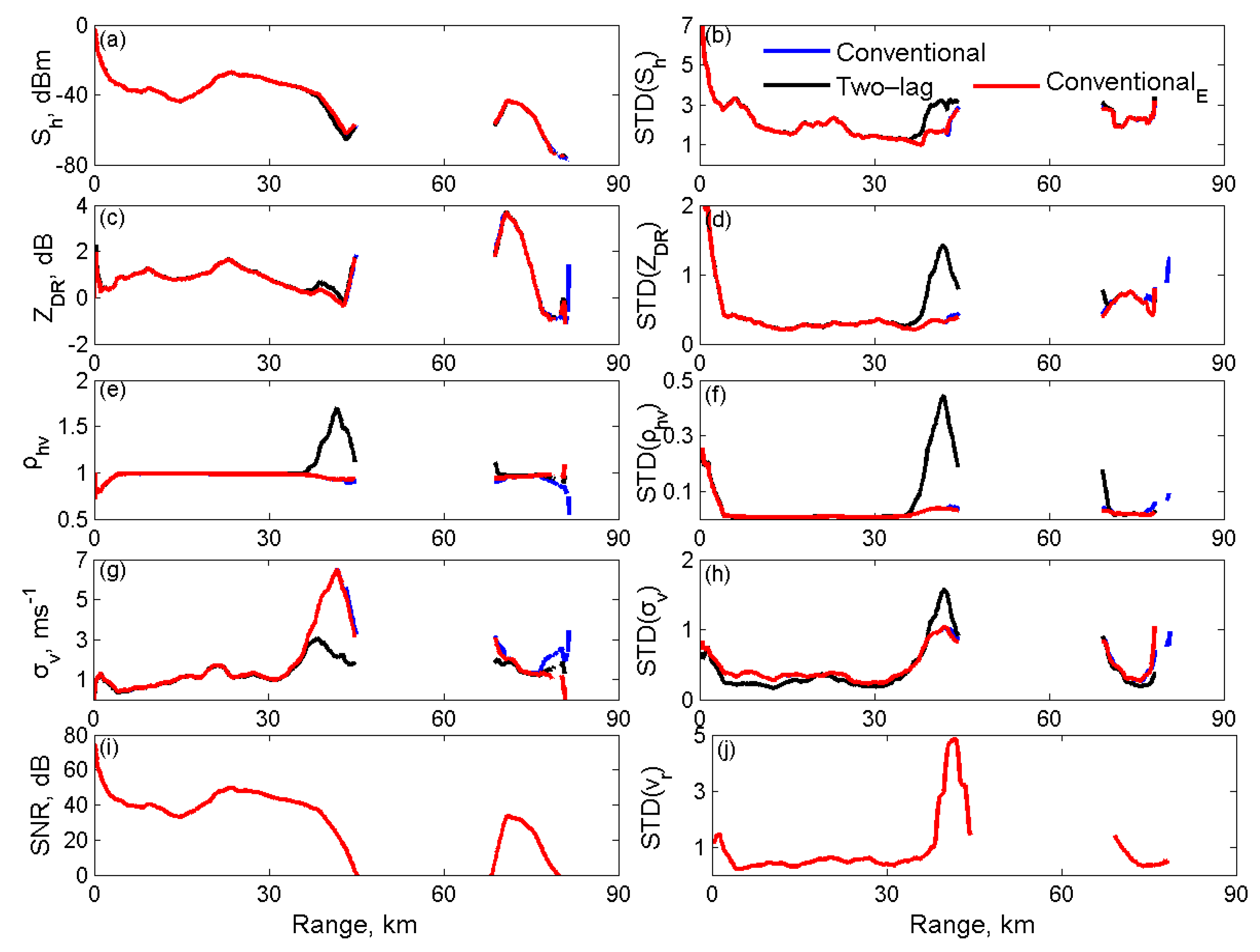
3.1.2. Case 2: Squall Line Precipitation
3.2. Results Based on IOPs Data
4. Discussion
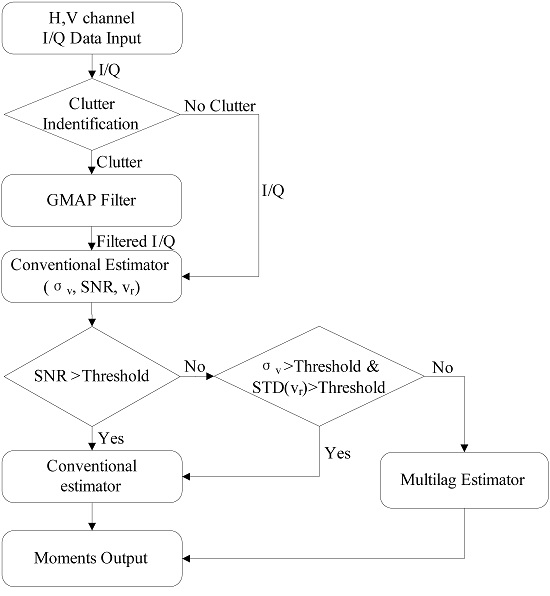
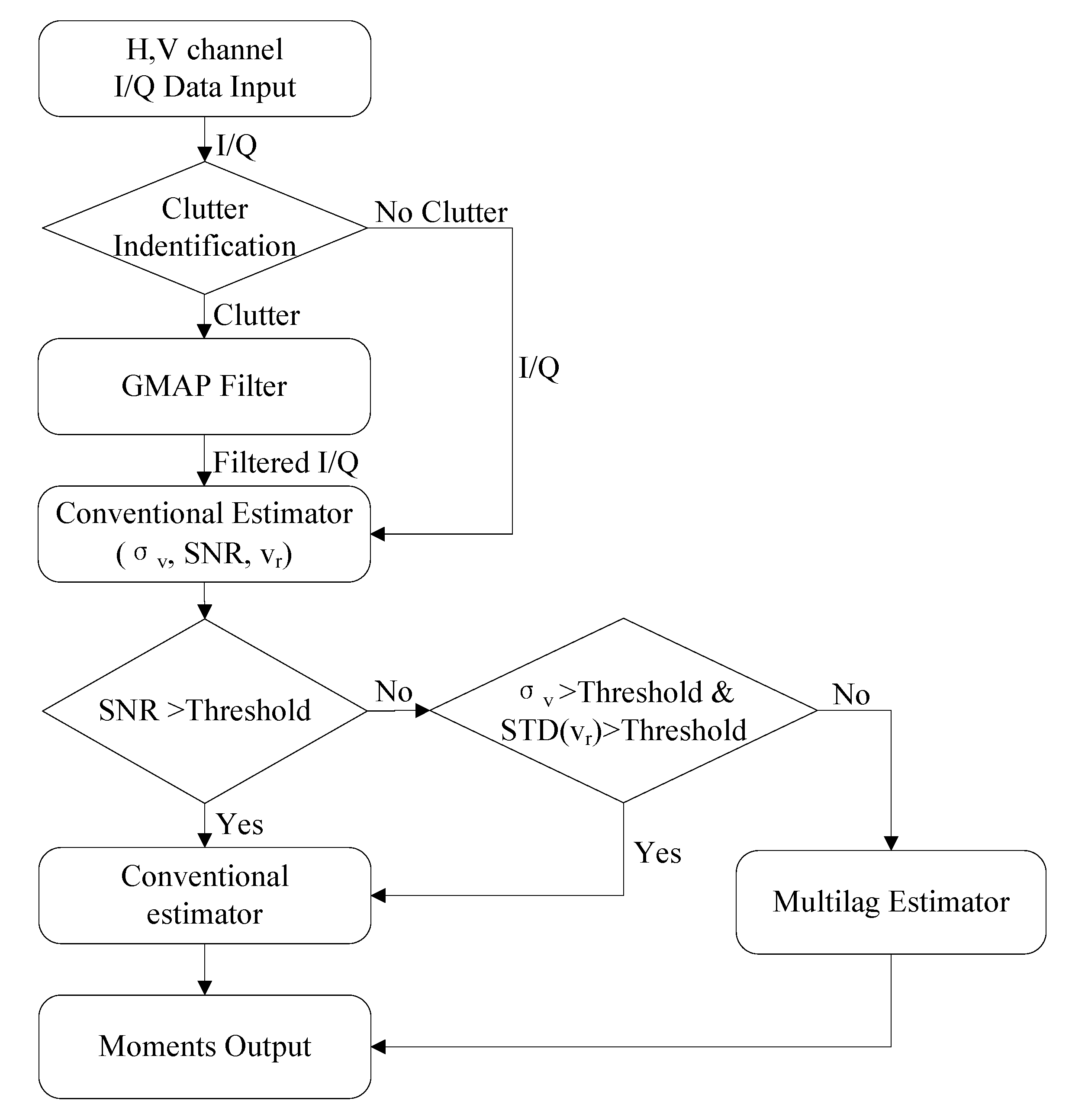
4.1. The Hybrid Algorithm
4.2. Case Study and Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vivekanandan, J.; Zrnic, D.S.; Ellis, S.M.; Oye, R.; Ryzhkov, A.V.; Straka, J. Cloud Microphysics Retrieval Using S-Band Dual-Polarization Radar Measurements. Bull. Am. Meteorol. Soc. 1999, 80, 381–388. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar: Principles and Applications; Cambridge University Press: Cambridge, UK, 2001; p. 636. [Google Scholar]
- Zrnić, D.S.; Ryzhkov, A. Advantages of rain measurements using specific differential phase. J. Atmos. Ocean. Technol. 1996, 13, 454–464. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Chandrasekar, V.; Bechini, R. An Improved Dual-Polarization Radar Rainfall Algorithm (DROPS2.0): Application in NASA IFloodS Field Campaign. J. Hydrometeorol. 2017, 18, 917–937. [Google Scholar] [CrossRef]
- Groginsky, H.L.; Glover, K.M. Weather radar canceller design. In Proceedings of the 19th Conference on Radar Meteorology, Miami Beach, FL, USA, 15–18 April 1980. [Google Scholar]
- Meischner, P. Weather Radar Principles and Advanced Applications; Springer: Berlin/Heidelberg, Germany, 2002; p. 337. [Google Scholar]
- Lee, R.; Deruma, G.; Joss, J. Intensity of ground clutter and of echoes of anomalous propagation and its elimination. In Proceedings of the 27th Conference on Radar Meteorology, Vail, CO, USA, 9–13 October 1995; pp. 651–652. [Google Scholar]
- Kessinger, C.; Ellis, S.; Andel, J.V. The radar echo classifier: A fuzzy logic algorithm for the WSR-88D. In Proceedings of the Third Conference on Artificial Intelligence Applications to the Environmental Science, Long Beach, CA, USA, 9–13 February 2003; American Meteorological Society: Boston, MA, USA, 2003. [Google Scholar]
- Steiner, M.; Smith, A. Use of Three-Dimensional Reflectivity Structure for Automated Detection and Removal. J. Atmos. Ocean. Technol. 2002, 19, 673–686. [Google Scholar] [CrossRef]
- Hubbert, J.C.; Dixon, M.; Ellis, S.M.; Meymaris, G. Weather Radar Ground Clutter. Part I: Identification, Modeling, and Simulation. J. Atmos. Ocean. Technol. 2009, 26, 1165–1180. [Google Scholar] [CrossRef]
- Hubbert, J.C.; Dixon, M.; Ellis, S.M. Weather Radar Ground Clutter. Part II: Real-Time Identification and Filtering. J. Atmos. Ocean. Technol. 2009, 26, 1181–1197. [Google Scholar] [CrossRef]
- Siggia, A.D.; Passarelli, R.E. Gaussian model adaptive processing (GMAP) for improved ground clutter cancellation and moment calculation. Proc. ERAD 2004, 2, 421–424. [Google Scholar]
- Zhang, G.; Li, Y.; Doviak, R.J.; Priegnitz, D.; Carter, J.; Curtis, C.D. Multipatterns of the National Weather Radar Testbed Mitigate Clutter Received via Sidelobes. J. Atmos. Ocean. Technol. 2011, 28, 401–409. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, G.; Doviak, R.J. Ground Clutter Detection Using the Statistical Properties of Signals Received With a Polarimetric Radar. IEEE Trans. Signal Process. 2014, 62, 597–606. [Google Scholar] [CrossRef]
- Melnikov, V.M.; Zhang, P.; Zrnic, D.S.; Ryzhkov, A. Recombination of Super Resolution Data and Ground Clutter Recognition on the Polarimetric WSR-88D; NSSL: Norman, OK, USA, 2008. [Google Scholar]
- Golbon-Haghighi, M.-H.; Zhang, G. Detection of Ground Clutter for Dual-Polarization Weather Radar Using a Novel 3D Discriminant Function. J. Atmos. Ocean. Technol. 2019, 36, 1285–1296. [Google Scholar] [CrossRef]
- Doviak, R.J.; Zrnić, D.S. Doppler Radar and Weather Observations, 2nd ed.; Dover Publication: Mineola, NY, USA, 2006; p. 562. [Google Scholar]
- Melnikov, V.M.; Zrnić, D.S. Autocorrelation and Cross-Correlation Estimators of Polarimetric Variables. J. Atmos. Ocean. Technol. 2007, 24, 1337–1350. [Google Scholar] [CrossRef]
- Fang, M.; Doviak, R.J.; Melnikov, V. Spectrum Width Measured by WSR-88D: Error Sources and Statistics of Various Weather Phenomena. J. Atmos. Ocean. Technol. 2004, 21, 888–904. [Google Scholar] [CrossRef]
- Ivić, I.R.; Curtis, C.; Torres, S.M. Radial-Based Noise Power Estimation for Weather Radars. J. Atmos. Ocean. Technol. 2013, 30, 2737–2753. [Google Scholar] [CrossRef]
- Zhang, G.; Doviak, R.J.; Vivekanandan, J.; Brown, W.O.J.; Cohn, S.A. Performance of correlation estimators for spaced-antenna wind measurement in the presence of noise. Radio Sci. 2004, 39, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Warde, D.A.; Torres, S.M. Spectrum Width Estimation Using Matched Autocorrelations. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1661–1664. [Google Scholar] [CrossRef]
- Ivić, I.R. A Technique to Improve Copolar Correlation Coefficient Estimation. IEEE Geosci. Remote Sens. Lett. 2016, 54, 5776–5800. [Google Scholar] [CrossRef]
- Lei, L.; Zhang, G.; Doviak, R.J.; Palmer, R.; Cheong, B.L.; Xue, M.; Cao, Q.; Li, Y. Multilag Correlation Estimators for Polarimetric Radar Measurements in the Presence of Noise. J. Atmos. Ocean. Technol. 2012, 29, 772–795. [Google Scholar] [CrossRef] [Green Version]
- Cao, Q.; Zhang, G.; Palmer, R.D.; Knight, M.; May, R.; Stafford, R.J. Spectrum-Time Estimation and Processing (STEP) for Improving Weather Radar Data Quality. IEEE Geosci. Remote Sens. Lett. 2012, 50, 4670–4683. [Google Scholar] [CrossRef]
- Xue, M. Preface to the Special Issue on the “Observation, Prediction and Analysis of severe Convection of China” (OPACC) National “973” Projec. Adv. Atmos. Sci. 2016, 33, 1099–1101. [Google Scholar] [CrossRef]
- Vaisala. User’s Manual of RVP900TM Digital Receiver and Signal Processor (M211322EN-B); Vaisala: Vantaa, Finland, 2013; p. 478. [Google Scholar]
- Doviak, R.J.; Bringi, V.; Ryzhkov, A.; Zahrai, A.; Zrnić, D. Considerations for Polarimetric Upgrades to Operational WSR-88D Radars. J. Atmos. Ocean. Technol. 2000, 17, 257–278. [Google Scholar] [CrossRef]
- Zhang, G. Weather Radar Polarimetry; CRC Press: Boca Raton, FL, USA, 2016; p. 322. [Google Scholar]
- Melnikov, V.M.; Doviak, R.J. Spectrum Widths from Echo Power Differences Reveal Meteorological Features. J. Atmos. Ocean. Technol. 2002, 19, 1793–1810. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Investigation of the predictability and physical mechanisms of an extreme-rainfall-producing mesoscale convective system along the Meiyu front in East China: An ensemble approach. J. Geophys. Res. Atmos. 2015, 120, 10593–10618. [Google Scholar] [CrossRef]
- Sachidananda, M.; Zrnic, D.S. ZDR measurement considerations for a fast scan capability radar. Radio Sci. 1985, 20, 907–922. [Google Scholar] [CrossRef]
- Sachidananda, M.; Zrnic, D.S. Differential propagation phase shift and rainfall rate estimation. Radio Sci. 1986, 21, 235–247. [Google Scholar] [CrossRef]
- Melnikov, V.M.; Zrnic, D.S. Simultaneous Transmission Mode for the Polarimetric WSR-88D: Statistical Biases and Standard Deviations of Polarimetric Variables; NOAA/NSSL Report; NOAA: Silver Spring, MD, USA; NSSL: Norman, OK, USA, 2004; p. 84. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Frequency | Approximately 5625 MHz |
| Signal process | VAISALA RVP900 |
| Range dealiasing | SZ coding |
| Polarization type | ATSR/STSR |
| Number of pulses | 64 |
| PRT | 0.001 s |
| Resolution | 75 m |
| Measurements | Reflectivity at horizontal polarization (ZH) Doppler radial velocity (vr) Spectrum width (σv) Differential reflectivity (ZDR) Differential propagation phase (ΦDP) Copolar correlation coefficient (ρhv) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, S.; Zhao, K.; Chen, H.; Chen, J.; Huang, H. Validation of a Multilag Estimator on NJU-CPOL and a Hybrid Approach for Improving Polarimetric Radar Data Quality. Remote Sens. 2020, 12, 180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12010180
Shao S, Zhao K, Chen H, Chen J, Huang H. Validation of a Multilag Estimator on NJU-CPOL and a Hybrid Approach for Improving Polarimetric Radar Data Quality. Remote Sensing. 2020; 12(1):180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12010180
Chicago/Turabian StyleShao, Shiqing, Kun Zhao, Haonan Chen, Jianjun Chen, and Hao Huang. 2020. "Validation of a Multilag Estimator on NJU-CPOL and a Hybrid Approach for Improving Polarimetric Radar Data Quality" Remote Sensing 12, no. 1: 180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12010180