Application of Unmanned Aerial Vehicle Data and Discrete Fracture Network Models for Improved Rockfall Simulations

 , , , , ,
, , , , ,
Abstract
:1. Introduction
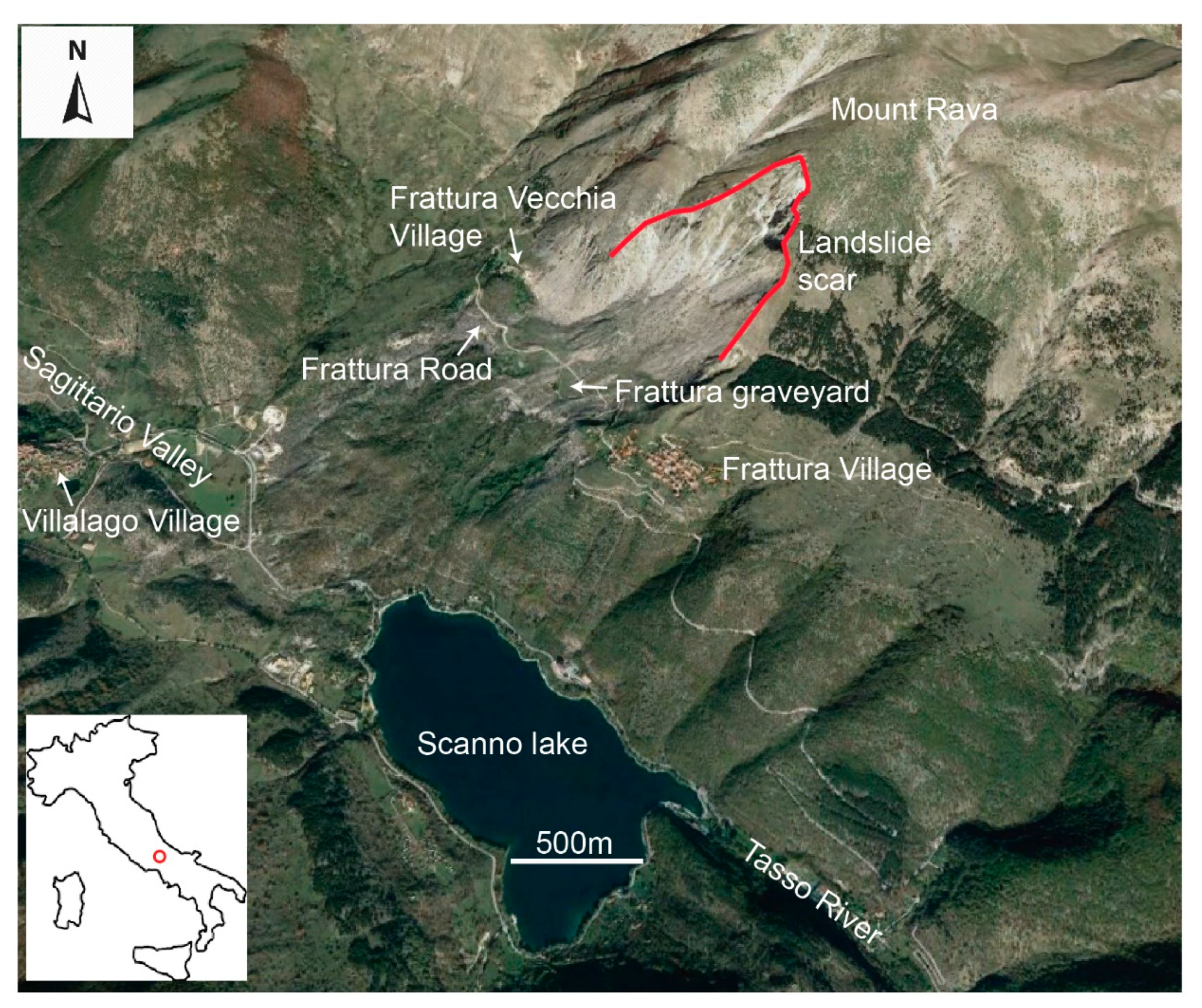
2. Study Area
3. Materials and Methods
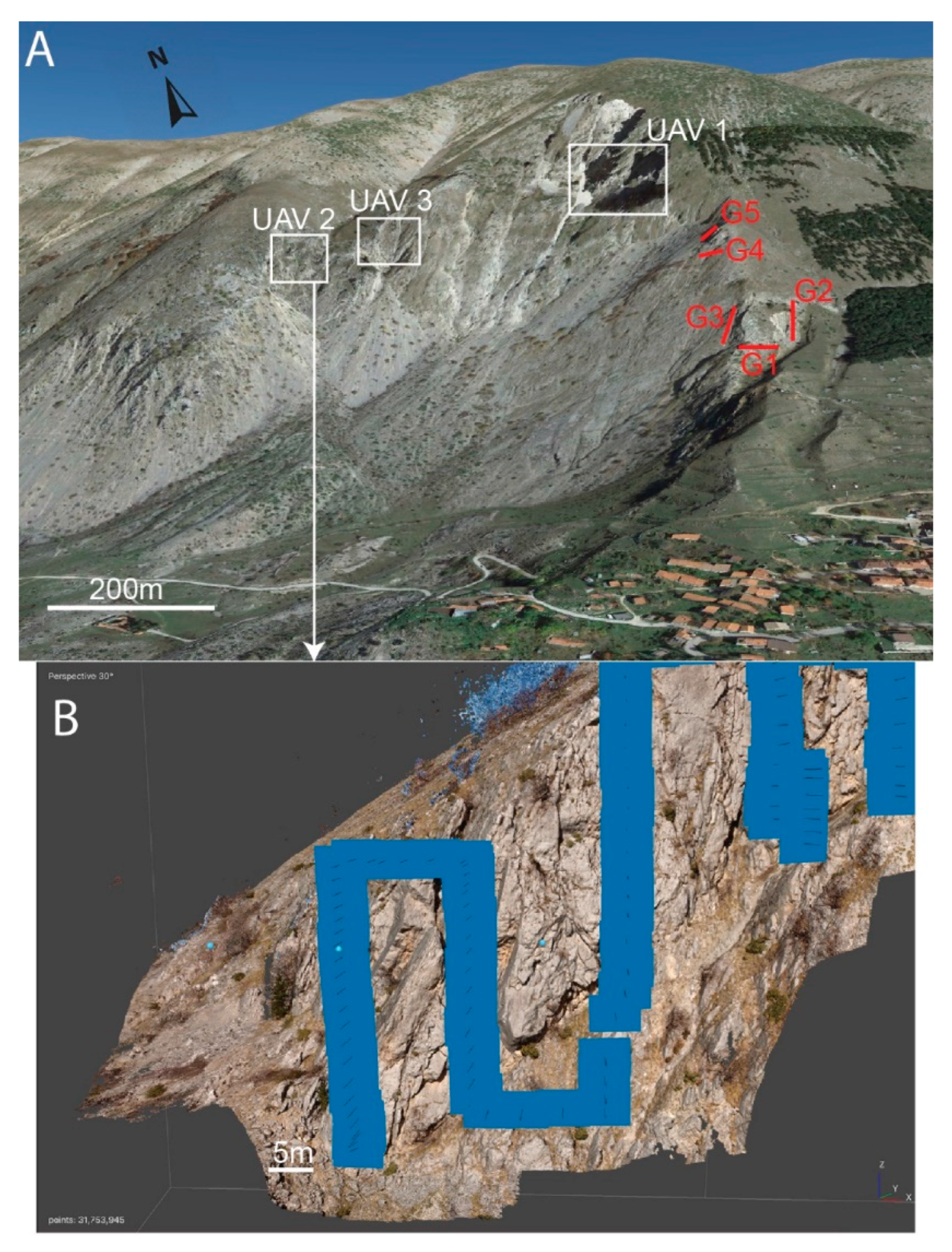
3.1. Conventional and DP (UAV-Based) Geomechanical Surveys
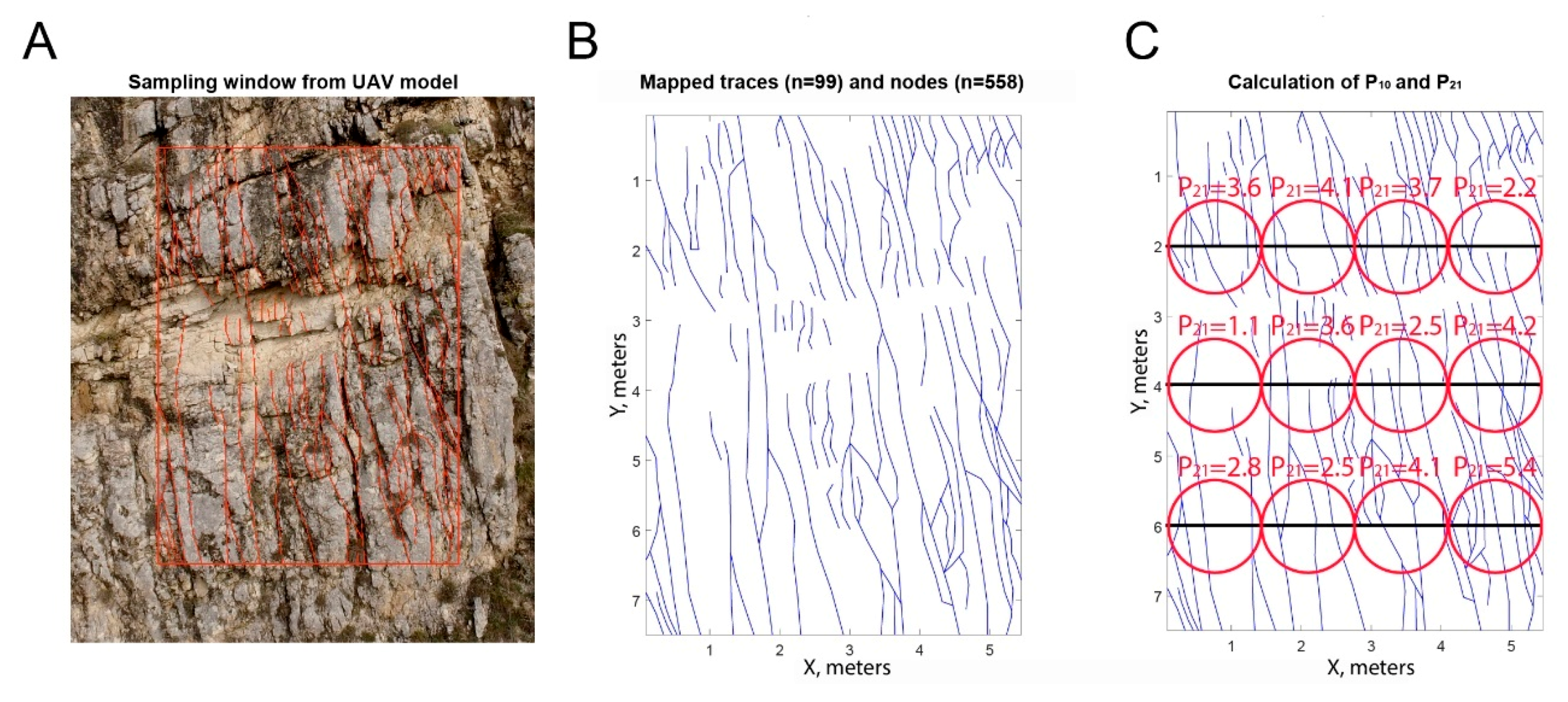
3.2. Sampling Windows and 3D DFN
3.3. Rockfall Simulations
4. Results
4.1. Geomechanical Data and Fracture Analysis
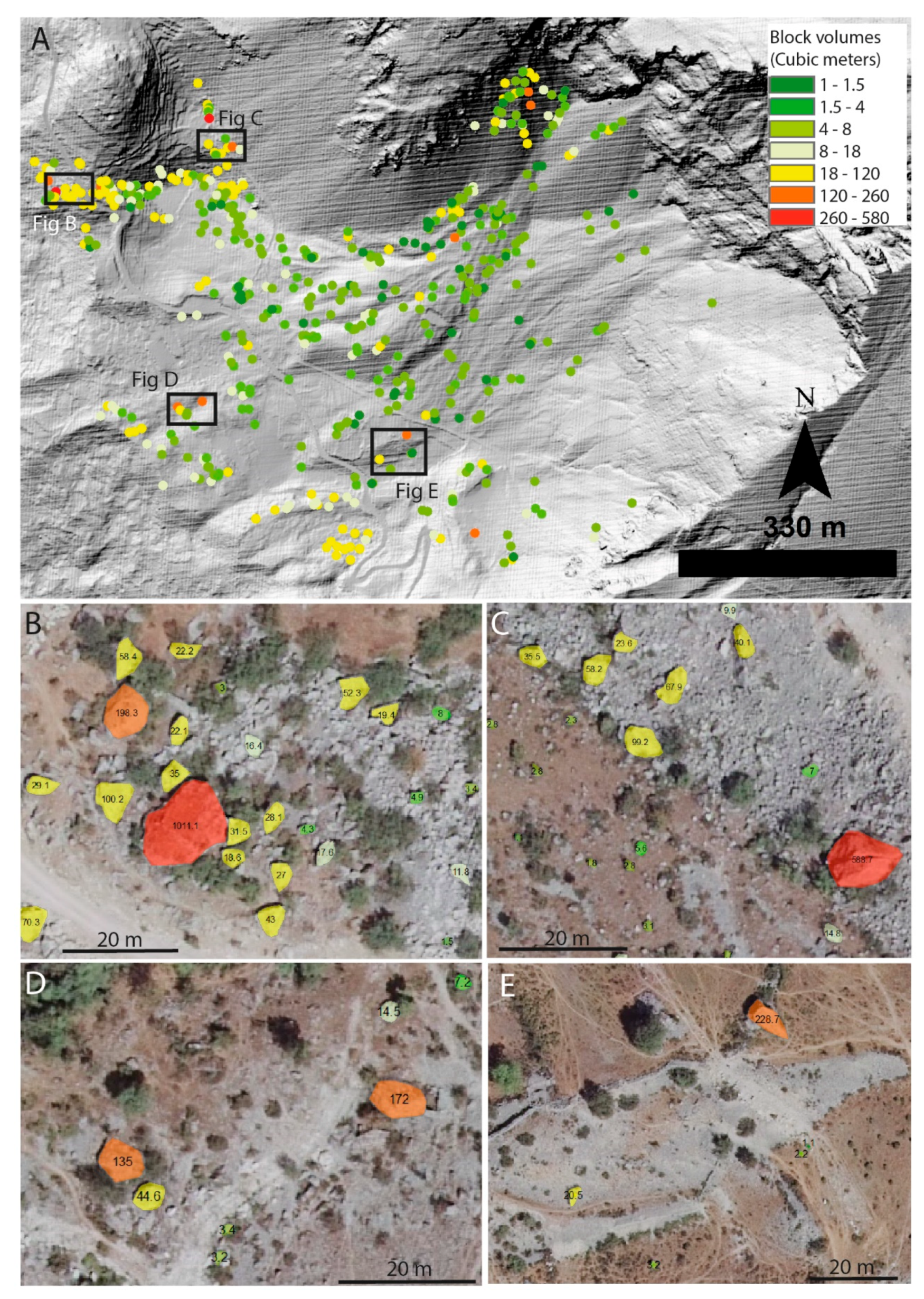
4.2. Rockyfor3D Simulation Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ISRM. International society for rock mechanics commission on standardization of laboratory and field tests. Suggested methods for the quantitative description of discontinuities in rock masses. Int. J. Rock Mech. Min. Sci. 1978, 15, 319–368. [Google Scholar] [CrossRef]
- Lato, M.; Diederichs, M.S.; Hutchinson, D.J.; Harrap, R. Optimization of LiDAR scanning and processing for automated structural evaluation of discontinuities in rockmasses. Int. J. Rock Mech. Min. Sci. 2009, 46, 194–199. [Google Scholar] [CrossRef]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Chanut, M.-A.; Laurent, D.; Jaboyedoff, M. Automated terrestrial laser scanning with near–real–time change detection–monitoring of the Séchilienne landslide. Earth Surf. Dyn. 2017, 5, 293–310. [Google Scholar] [CrossRef] [Green Version]
- Francioni, M.; Coggan, J.; Eyre, M.; Stead, D. A combined field/remote sensing approach for characterizing landslide risk in coastal areas. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 79–95. [Google Scholar] [CrossRef]
- Bonneau, D.A.; Hutchinson, D.J. The use of terrestrial laser scanning for the characterization of a cliff-talus system in the Thompson River Valley, British Columbia, Canada. Geomorphology 2019, 327, 598–609. [Google Scholar] [CrossRef]
- Kromer, R.; Walton, G.; Gray, B.; Lato, M.; Group, R. Development and Optimization of an Automated Fixed-Location Time Lapse Photogrammetric Rock Slope Monitoring System. Remote Sens. 2019, 11, 1890. [Google Scholar] [CrossRef] [Green Version]
- Sturzenegger, M.; Stead, D. Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat. Hazards Earth Syst. Sci. 2009, 9, 267–287. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; Berardinis, P.D.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review article: The use of remotely piloted aircraft systems (RPASs) for natural hazards monitoring and management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef] [Green Version]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV surveys for landslide mapping and characterization. Landslides 2018, 15, 1045–1052. [Google Scholar] [CrossRef] [Green Version]
- Donati, D.; Stead, D.; Brideau, M.A.; Ghirotti, M. A remote sensing approach for the derivation of numerical modelling input data: Insights from the Hope Slide, Canada. In Proceedings of the ISRM AfriRock - Rock Mechanics for Africa, Cape Town, South Africa, 3–5 October 2017; pp. 861–878. [Google Scholar]
- Wang, S.; Ahmed, Z.; Hashmi, M.Z.; Pengyu, W. Cliff face rock slope stability analysis based on unmanned arial vehicle (UAV) photogrammetry. Geomech. Geophys. Geo-Energy Geo-Resour. 2019, 5, 333–344. [Google Scholar] [CrossRef]
- Francioni, M.; Salvini, R.; Stead, D.; Coggan, J. Improvements in the integration of remote sensing and rock slope modelling. Nat. Hazards 2018, 90, 975–1004. [Google Scholar] [CrossRef] [Green Version]
- Stead, D.; Donati, D.; Wolter, A.; Sturzenegger, M. Application of remote sensing to the investigation of rock slopes: Experience gained and lessons learned. ISPRS Int. J. Geo-Inf. 2019, 8, 296. [Google Scholar] [CrossRef] [Green Version]
- Christen, M.; Bühler, Y.; Bartelt, P.; Leine, R.; Glover, J.; Schweizer, A.; Graf, C.; McArdell, B.W.; Gerber, W.; Deubelbeiss, Y.; et al. Integral hazard management using a unified software environment: Numerical simulation tool “RAMMS” for gravitational natural hazards. In Proceedings of the 12th Congress Interpraevent, Grenoble, France, 23–26 April 2012; pp. 77–86. [Google Scholar]
- Dorren, L.K.A.; Berger, F.; Putters, U.S. Real–size experiments and 3–D simulation of rockfall on forested and non–forested slopes. Nat. Hazards Earth Syst. Sci. 2006, 6, 145–153. [Google Scholar] [CrossRef] [Green Version]
- Guzzetti, F.; Crosta, G.; Detti, R.; Agliardi, F. STONE: A computer program for the three–dimensional simulation of rock–falls. Comput. Geosci. 2002, 28, 1079–1093. [Google Scholar] [CrossRef]
- Turner, A.K.; Duffy, J.D. Modelling and prediction of Rockfalls. In Rockfall: Characterization and Control; TRB: Washington, DC, USA, 2012. [Google Scholar]
- Wyllie, D.C.; Mah, C.W. Rock Slope Engineering: Civil and Mining, 4th ed.; Routledge: London, UK, 2004; p. 456. [Google Scholar]
- Dorren, L.K.A. A review of rockfall mechanics and modelling approaches. Prog. Phys. Geogr. 2003, 27, 69–87. [Google Scholar] [CrossRef]
- Keylock, C.; Domaas, U. Evaluation of topographic models of rockfall travel distance for use in hazard applications. Arctic Antarct. Alpine Res. 1999, 31, 312–320. [Google Scholar] [CrossRef]
- Tianchi, L. A mathematical model for predicting the extent of a major rockfall. Z. Geomorphol. 1983, 27, 473–482. [Google Scholar]
- Toppe, R. Terrain models—A tool for natural hazard mapping. In Avalanche Formation, Movement and Effects; Salm, B., Gubler, H., Eds.; IAHS Publication: Oxfordshire, UK, 1987; Volume 162, pp. 629–638. [Google Scholar]
- Evans, S.G.; Hungr, O. The assessment of rockfall hazard at the base of talus slopes. Can. Geotech. J. 1993, 30, 620–636. [Google Scholar] [CrossRef]
- Heim, A. Bergsturz und Menschenleben.–Beiblatt Vierteljahrsschr. Nat.Forsch. Ges. Zürich 1932, 20, 1–214. Available online: https://www.gra-nat.ch/system/media/2410/original/77BB20_0.pdf?1422022711 (accessed on 25 June 2020).
- Kirkby, M.J.; Statham, I. Surface stone movement and scree formation. J. Geol. 1975, 83, 349–362. [Google Scholar] [CrossRef]
- Statham, I.; Francis, S.C. Influence of scree accumulation and weathering on the development of steep mountain slopes. In Hillslope Processes; Abrahams, A.D., Ed.; Allen and Unwin Inc.: Winchester, MA, USA, 1986; pp. 245–267. [Google Scholar]
- Azzoni, A.; Barbera, G.L.; Zaninetti, A. Analysis and prediction of rockfalls using a mathematical model. Int. J. Rock Mech. Min. 1995, 32, 709–724. [Google Scholar] [CrossRef]
- Hegg, C.; Kienholz, H. Determining paths of gravity-driven slope processes—The ‘Vector Tree Model’. In Geographic Information Systems in Assessing Natural Hazards; Carrara, A., Guzetti, F., Eds.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1995; pp. 79–92. [Google Scholar]
- Meissl, G. Modellierung der Reichweite von Felsstürzen. Fallbeispeile zur GISgestützten Gefahrenbeurteilung aus dem Beierischen und Tiroler Alpenraum. Innsbrucker Geografischen Studien 28. Ph.D. Thesis, Universität Innsbruck, Innsbruck, Austria, 1998; 249p. [Google Scholar]
- Van Dijke, J.J.; van Westen, C.J. Rockfall hazard, a geomorphological application of neighbourhood analysis with ILWIS. ITC J. 1990, 1, 40–44. [Google Scholar]
- Netti, T.; Castelli, M.; De Biagi, V. Effect of the Number of Simulations on the Accuracy of a Rockfall Analysis. Procedia Eng. 2016, 158, 464–469. [Google Scholar] [CrossRef] [Green Version]
- Kusák, M.; Valagussa, A.; Frattini, P. Key issues in 3d rockfall modeling, natural hazard and risk assessment for rockfall protection in hřensko (Czechia). Acta Geodyn. Geomater. 2019, 16, 393–408. [Google Scholar] [CrossRef]
- Vanneschi, C.; Di Camillo, M.; Aiello, E.; Bonciani, F.; Salvini, R. SfM–MVS Photogrammetry for Rockfall Analysis and Hazard Assessment Along the Ancient Roman Via Flaminia Road at the Furlo Gorge (Italy). ISPRS Int. J. Geo-Inf. 2019, 8, 325. [Google Scholar] [CrossRef] [Green Version]
- Asteriou, P.; Tsiambaos, G. Effect of impact velocity, block mass and hardness on the coefficients of restitution for rockfall analysis. Int. J. Rock Mech. Min. Sci. 2018, 106, 41–50. [Google Scholar] [CrossRef]
- Robiati, C.; Eyre, M.; Vanneschi, C.; Francioni, M.; Venn, A.; Coggan, J. Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope. ISPRS Int. J. Geo-Inf. 2019, 8, 367. [Google Scholar] [CrossRef] [Green Version]
- Havaej, M.; Coggan, J.; Stead, D.; Elmo, D. A combined remote sensing–numerical modelling approach to the stability analysis of Delabole slate quarry, Cornwall, UK. Rock Mech. Rock Eng. 2016, 49, 1227–1245. [Google Scholar] [CrossRef] [Green Version]
- Lei, Q.; Latham, J.P.; Tsang, C.F. The use of discrete fracture networks for modelling coupled geomechanical and hydrological behaviour of fractured rocks. Comput. Geotech. 2017, 85, 151–176. [Google Scholar] [CrossRef]
- Guo, L.; Hu, X.; Wu, L.; Li, X.; Ma, H. Simulation of fluid flow in fractured rocks based on the discrete fracture network model optimized by measured information. Int. J. Geomech. 2018, 18, 1–26. [Google Scholar] [CrossRef]
- Lepillier, B.; Bruna, P.O.; Bruhn, D.; Bastesen, E.; Daniilidis, A.; Garcia, Ó.; Torabi, A.; Wheeler, W. From outcrop scanlines to discrete fracture networks, an integrative workflow. J. Struct. Geol. 2020, 133, 103992. [Google Scholar] [CrossRef]
- Lambert, C.; Thoeni, K.; Giacomini, A.; Casagrande, D.; Sloan, S. Rockfall hazard analysis from discrete fracture network modelling with finite persistence discontinuities. Rock Mech. Rock Eng. 2012, 45, 871–884. [Google Scholar] [CrossRef]
- Ruiz–Carulla, R.; Corominas, J. Analysis of rockfalls by means of a fractal fragmentation model. Rock Mech. Rock Eng. 2019, 53, 1433–1455. [Google Scholar] [CrossRef]
- Ruiz–Carulla, R.; Corominas, J.; Mavrouli, O. A fractal fragmentation model for rockfalls. Landslides 2017, 14, 875–889. [Google Scholar] [CrossRef]
- Crosta, G.B.; Agliardi, F.; Frattini, P.; Lari, S. Key issues in rock fall modeling, hazard and risk assessment for rockfall protection. In Engineering Geology for Society and Territory–Volume 2: Landslide Processes; Springer International Publishing: Cham, Switzerland, 2015; pp. 43–58. [Google Scholar]
- Bianchi-Fasani, G.; Esposito, C.; Petitta, M. The Importance of Geological Models in Understanding and Predicting the Life Span of Rockslide Dams: The Case of Scanno Lake, Central Italy; Springer: Berlin/Heidelberg, Germany, 2011; pp. 323–345. [Google Scholar]
- Nicoletti, P.; Parise, M.; Miccadei, E. The Scanno rock avalanche (Abruzzi, South-Central Italy). Boll. Della Soc. Geol. Ital. 1993, 112, 523–535. [Google Scholar]
- Della Seta, M.; Esposito, C.; Marmoni, G.M.; Martino, S.; Scarascia Mugnozza, G.; Troiani, F. Morpho–structural evolution of the valley—Slope systems and related implications on slope–scale gravitational processes: New results from the Mt. Genzana case history (Central Apennines, Italy). Geomorphology 2017, 289, 60–77. [Google Scholar] [CrossRef]
- Francioni, M.; Calamita, F.; Coggan, J.; De Nardis, A.; Eyre, M.; Miccadei, E.; Piacentini, T.; Stead, D.; Sciarra, N. A multi-disciplinary approach to the study of large rock avalanches combining remote sensing, GIS and field surveys: The case of the Scanno landslide, Italy. Remote Sens. 2019, 11, 1570. [Google Scholar] [CrossRef] [Green Version]
- Miccadei, E.; Piacentini, T.; Pozzo, A.D.; Corte, M.L.; Sciarra, M. Morphotectonic map of the Aventino–Lower Sangro valley (Abruzzo, Italy), scale 1:50,000. J. Maps 2013, 9, 390–409. [Google Scholar] [CrossRef] [Green Version]
- Healy, D.; Rizzo, R.E.; Cornwell, D.G.; Farrell, N.J.; Watkins, H.; Timms, N.E.; Gomez-Rivas, E.; Smith, M. FracPaQ: A MATLABTM toolbox for the quantification of fracture patterns. J. Struct Geol. 2017, 95, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Dorren, L.K.A. Rockyfor3D (v5.2) Revealed–Transparent Description of the Complete 3D Rockfall Model. 2016. Available online: https://www.ecorisq.org/docs/Rockyfor3D_v5_2_EN.pdf (accessed on 10 October 2019).
- Agisoft, L.L.C. Agisoft Metashape 2020. Available online: https://www.agisoft.com/ (accessed on 10 September 2019).
- CloudCompare. CloudCompare 2020. Available online: https://www.danielgm.net/cc/ (accessed on 10 September 2019).
- Dershowitz, W.S.; Herda, H.H. Interpretation of fracture spacing and intensity. In Proceedings of the 33rd US Symposium on Rock Mechanics, Santa Fe, NM, USA, 3–5 June 1992; pp. 757–766. [Google Scholar]
- Petroleum Experts. Move. 2019. Available online: https://www.petex.com/ (accessed on 10 January 2020).
- Mitchell, A.; Hungr, O. Theory and calibration of the Pierre 2 stochastic rock fall dynamics simulation program. Can. Geotech. J. 2017, 54, 18–30. [Google Scholar] [CrossRef]
- Li, L.; Lan, H. Probabilistic modeling of rockfall trajectories: A review. Bull. Eng. Geol. Environ. 2015, 74, 1163–1176. [Google Scholar] [CrossRef]
- Giuffrida, A.; La Bruna, V.; Castelluccio, P.; Panza, E.; Rustichelli, A.; Tondi, E.; Giorgioni, M.; Agosta, F. Fracture simulation parameters of fractured reservoirs: Analogy with outcropping carbonates of the Inner Apulian Platform, southern Italy. J. Struct. Geol. 2019, 123, 18–41. [Google Scholar] [CrossRef]
- Watkins, H.; Healy, D.; Bond, C.E.; Butler, R.W.H. Implications of heterogeneous fracture distribution on reservoir quality; an analogue from the Torridon Group sandstone, Moine Thrust Belt, NW Scotland. J. Struct. Geol. 2018, 108, 180–197. [Google Scholar] [CrossRef] [Green Version]
- Corona, C.; Lopez-Saez, J.; Favillier, A.; Mainieri, R.; Eckert, N.; Trappmann, D.; Stoffel, M.; Bourrier, F.; Berger, F. Modeling rockfall frequency and bounce height from three–dimensional simulation process models and growth disturbances in submontane broadleaved trees. Geomorphology 2017, 281, 66–77. [Google Scholar] [CrossRef]
- Moos, C.; Toe, D.; Bourrier, F.; Knüsel, S.; Stoffel, M.; Dorren, L.K.A. Assessing the effect of invasive tree species on rockfall risk—The case of Ailanthus altissima. Ecol. Eng. 2019, 31, 63–72. [Google Scholar] [CrossRef]
- Moos, C.; Fehlmann, M.; Trappmann, D.; Stoffel, M.; Dorren, L.K.A. Integrating the mitigating effect of forests into quantitative rockfall risk analysis—Two case studies in Switzerland. Int. J. Disaster Risk Reduct. 2018, 32, 55–74. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV 1 | UAV 2 | UAV 3 | TOT | |
|---|---|---|---|---|
| Number of images | 1394 | 320 | 417 | 2131 |
| Flying altitude | 36.1 m | 46.5 m | 48.4 m | - |
| Ground resolution | 1.32 cm/pix | 1.75 cm/pix | 1.87 cm/pix | - |
| Coverage area | 30,400 m2 | 14,100 m2 | 20,200 m2 | 64,700 m2 |
| Camera stations | 1305 | 310 | 416 | 2031 |
| Tie points | 470,465 | 66,838 | 50,459 | 587,762 |
| Projections | 2,027,078 | 837,491 | 586,300 | 3,450,869 |
| Reprojection error | 2.22 pix | 0.734 pix | 0.949 pix | - |
| Dense cloud points | 80,389,940 | 315,345 | 39,098,143 | - |
| High Fracture Intensity–DFN 1 | Low Fracture Intensity–DFN 2 | |||||
|---|---|---|---|---|---|---|
| S0 | J1 | J2 | S0 | J1 | J2 | |
| Average P21-Sampling windows | 2.05 (±0.61) | 0.98 (±0.31) | 3.43 (±0.89) | 0.07 (±0.02) | 0.33 (±0.12) | 0.49 (±0.15) |
| Average P21-DFN | 2.17 (±0.61) | 0.94 (±0.26) | 3.40 (±0.94) | 0.07 (±0.04) | 0.3 (±0.0) | 0.49 (±0.15) |
| S0 | J1 | J2 | ||
|---|---|---|---|---|
| Intensity, m2/m3 | P32 | 6.0 | 2.0 | 6.30 |
| Length, m | Min | 0.5 | - | 0.3 |
| Max | 54.0 | - | 30.0 | |
| Exponent | −2.1 | - | −2.7 | |
| Mean | - | 35.6 | - | |
| Std Dev | - | 4.0 | - | |
| Orientation, deg | Dip | 46 | 79 | 83 |
| Dip Dir | 41 | 233 | 156 | |
| Fisher K | 70 | 100 | 180 |
| S0 | J1 | J2 | ||
|---|---|---|---|---|
| Intensity, m2/m3 | P32 | 0.22 | 0.18 | 0.9 |
| Length, m | Min | - | - | 60 |
| Max | - | - | 154 | |
| Exponent | - | - | −3.0 | |
| Mean | 129.0 | 60 | - | |
| Std Dev | 13.6 | 10 | - | |
| Orientation, deg | Dip | 46 | 79 | 83 |
| Dip Dir | 41 | 233 | 156 | |
| Fisher K | 50 | 180 | 200 |
| ID | Soil Type | Rn Range | Rg70 (m) | Rg20 (m) | Rg10 (m) |
|---|---|---|---|---|---|
| 0 | Lake | 0 | 0 | 0 | 0 |
| 1 | Fine soil material (depth > ~100 cm) | 0.21–0.25 | 0.3 | 0.5 | 0.9 |
| 3 | Scree (Ø < ~10 cm), or medium compact soil with small rock fragments, or forest road | 0.30–0.36 | 0.25 | 0.5 | 0.9 |
| 4a | Talus slope (Ø > ~10 cm), or compact soil with large rock fragments | 0.34–0.42 | 0.05 | 0.05 | 1 |
| 4b | Talus slope (Ø > ~10 cm), or compact soil with large rock fragments | 0.34–0.42 | 0.05 | 0.1 | 0.2 |
| 4c | Talus slope (Ø > ~10 cm), or compact soil with large rock fragments | 0.34–0.42 | 0.3 | 0.3 | 0.3 |
| 4d | Talus slope (Ø > ~10 cm), or compact soil with large rock fragments | 0.34–0.42 | 0.25 | 0.5 | 0.9 |
| 5 | Bedrock with thin weathered material or soil cover | 0.39–0.47 | 0 | 0 | 0.1 |
| 6 | Bedrock | 0.48–0.58 | 0 | 0 | 0.05 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Francioni, M.; Antonaci, F.; Sciarra, N.; Robiati, C.; Coggan, J.; Stead, D.; Calamita, F. Application of Unmanned Aerial Vehicle Data and Discrete Fracture Network Models for Improved Rockfall Simulations. Remote Sens. 2020, 12, 2053. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122053
Francioni M, Antonaci F, Sciarra N, Robiati C, Coggan J, Stead D, Calamita F. Application of Unmanned Aerial Vehicle Data and Discrete Fracture Network Models for Improved Rockfall Simulations. Remote Sensing. 2020; 12(12):2053. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122053
Chicago/Turabian StyleFrancioni, Mirko, Federico Antonaci, Nicola Sciarra, Carlo Robiati, John Coggan, Doug Stead, and Fernando Calamita. 2020. "Application of Unmanned Aerial Vehicle Data and Discrete Fracture Network Models for Improved Rockfall Simulations" Remote Sensing 12, no. 12: 2053. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122053