5.1. The Procedure of Luojia-1A Satellite POD
Several steps are required for the procedure of Luojia-1A satellite reduced dynamic orbit determination, which can be briefly described as follows. Firstly, obtaining the prior orbit of the satellite using the BDS pseudorange observations. The precise orbit and clocks products of BeiDou satellites, as well as the ERP products, are adopted to process the pseudorange positioning orbit result and then fitting the prior orbit using numerical integration. Secondly, data preprocessing for the zero difference phase observations, including cycle slip detection and outlier detection. After that, estimate the orbital parameters, dynamic parameters, and the pseudo-stochastic parameters for solving the improved satellite orbit, which is determined based on the prior orbit and the screened phase observations. The data preprocessing as well as the orbit improving procedure are iterated for the precise solution. Finally, the orbit generated from the last step is introduced as the prior orbit, and the screened phase observations are used to estimate the parameters; thus, the precise orbit result is obtained.
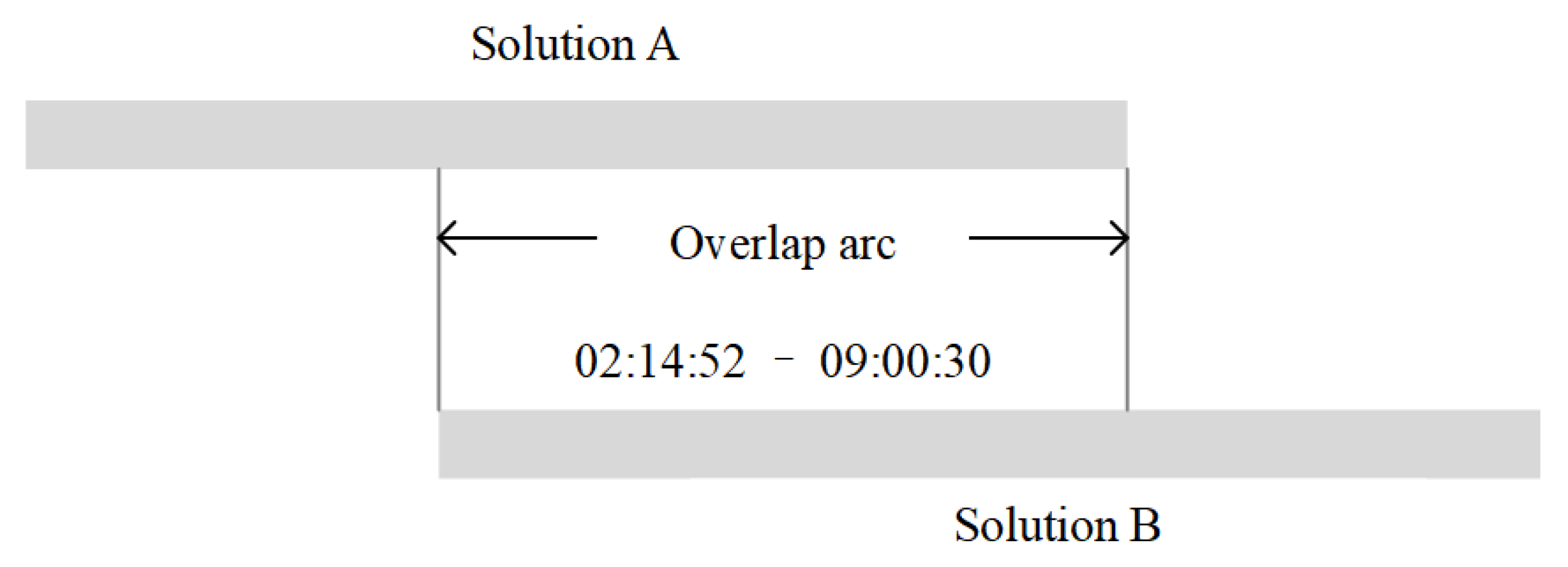
With regards to the orbit precision evaluation method, the overlapping comparison method is used since the Luojia-1A satellite does not equip with the laser reflector array (LRA), and there is no precise reference orbit for comparison. The overlapping comparison strategy for the Luojia-1A satellite is illustrated in
Figure 7. The observations of the Luojia-1A satellite in 2018 DOY159 are divided into two observational arcs, one contains the begin epoch until 9:00:30, the other contains 2:14:52 until the last epoch, and then two observational arcs are determined respectively. Therefore, the difference of two solutions in the overlapped part is used to assess the Luojia-1A orbit precision in this study.
5.2. Precise Orbit Determination with BeiDou Observations
The precise orbit determination of LEO requires precise BeiDou orbit, satellite clocks, and earth rotation parameters (ERP) products. One of the challenges for Beidou-based LEO POD is that the BeiDou orbit is generally not as good as the GPS orbit for many reasons. Presently, several analysis centers are providing multi-GNSS precise products with BeiDou constellation support. Four types of BeiDou precise products from different multi-GNSS experiment (MGEX) analysis centers are listed in
Table 2. However, a few issues arise in applying these products at the current stage, such as that the Technische Universität München (TUM) products currently does not involve the ERP products. The precise products provided by CODE do not involve the BDS-2 GEO satellites. The German Research Centre for Geosciences (GFZ) and Wuhan University provide the full BDS-2 satellites orbit and clock, but different phase center variation (PCV) models are applied for different ACs, so the products are not directly compatible. In this study, the Wuhan University Multi-GNSS (WUM) products are adopted to determine the precise orbit of the Luojia-1A satellite.
The BDS precise orbit and clocks products are critical factors for the Luojia-1A satellite POD. As reported, the precise orbit products of BDS GEO satellites are not as good as the IGSO and MEO satellites due to poor geometry relationship between the ground stations and the GEO satellites. Generally, the BeiDou GEO precise orbit only achieves a few decimeters accuracy, whereas the IGSO and MEO satellites achieve centimeter-level accuracy. Consequently, adopting the GEO satellites might decrease the LEO POD precision. WUM product employs a three-day arc for BDS orbit determination, and only the middle day is adopted as the final product. So the discontinuity is inevitably present at the day boundary (DBD) in orbit products [
27], which can be used to roughly evaluate the orbit precision [
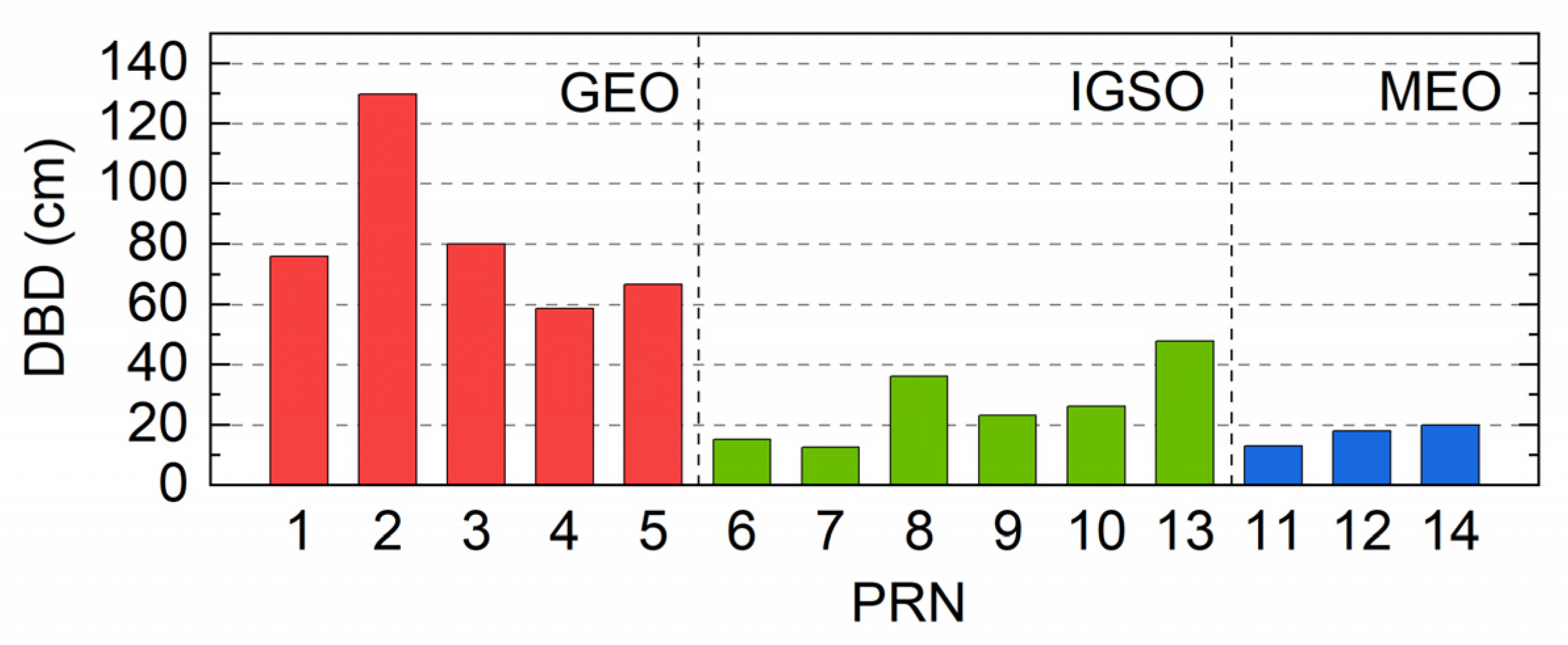
28]. To analyze the orbit precise of BeiDou satellites, the average DBDs of 2018 DOY 153 to DOY 163 are calculated. Since the last epoch of WUM orbit products is 23h 45m, the orbit is extrapolated to the 24 h at midnight, then the difference is calculated at the day boundary with the next day orbit product in radial, along-track, and cross-track directions. After that, the average 3D DBDs of BDS satellites orbit products are shown in
Figure 8. According to the figure, the GEO satellites present more significant DBDs than the IGSO and MEO satellites. The average DBDs of GEO satellites vary between 58 cm and 130 cm. As for IGSO satellites, the DBDs are less than 50 cm. The DBDs of MEO satellites are the smallest, which is generally less than 20 cm. The statistic result of different types of the BeiDou satellites are listed in
Table 3, the average DBD of GEO satellites is 82.28 cm, which is more than three times of IGSO satellites. The precision of MEO satellites is best, which is 17 cm.
According to the analysis of BeiDou satellites DBDs, the precision of GEO satellites orbit is not as good as that of IGSO and MEO satellites. Therefore, adopting the GEO satellite observations as same as IGSO and MEO satellite observations might decrease the LEO POD precision. Li et al. [
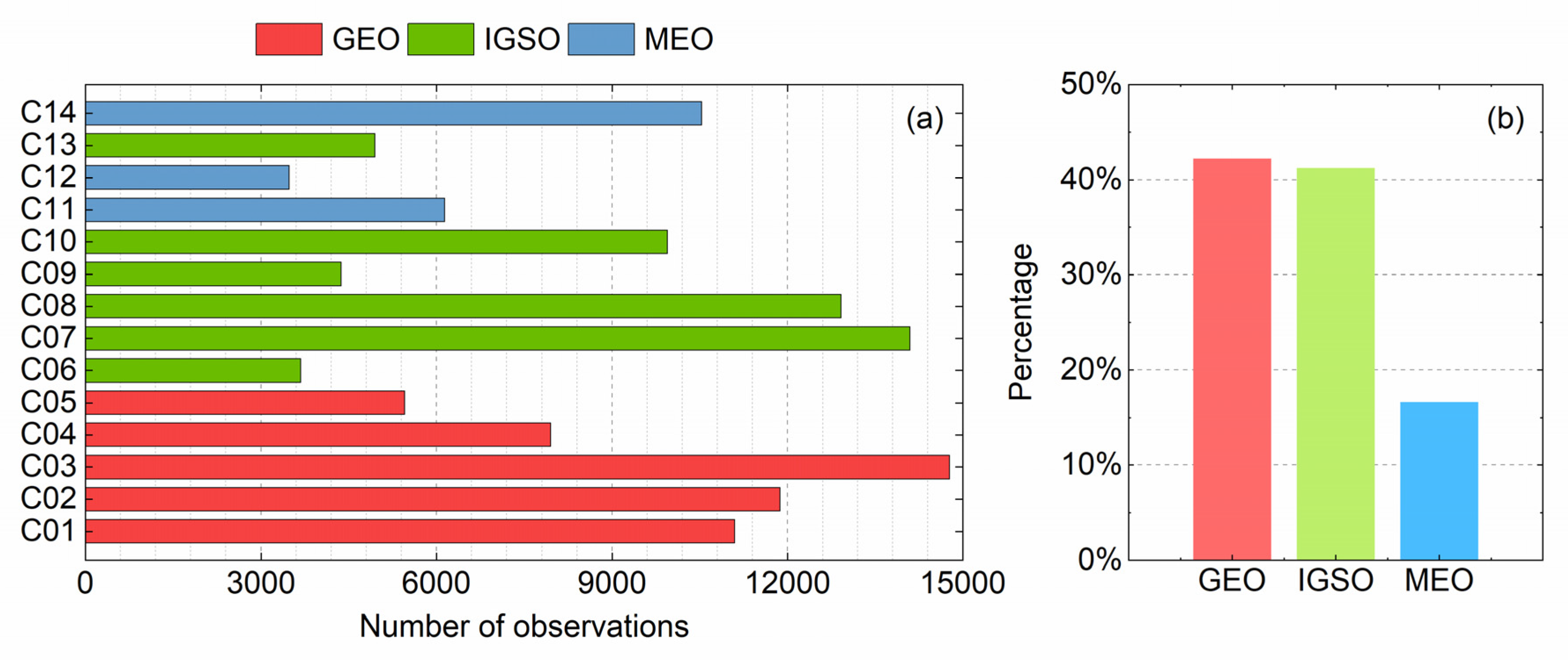
22] improve the BDS-based precise orbit determination result of FY-3C by excluding the GEO satellite observations. However, the GEO satellite observations of the Luojia-1A satellite contribute to more than 40% observations. Excluding the GEO satellite observations will dramatically reduce the number of effective observations and lead to a negative effect on the reliability of the POD results.
To determine the precise orbit of the Luojia-1A satellite, the satellite state vector can be expressed as follows [
29]:
where
and
are the position and the velocity of the LEO satellite at epoch
.
represents the force model parameter, e.g., the scaling factors of the perturbing accelerations acting on the LEO satellite.
is the pseudo-stochastic orbit parameter, which compensates for the inaccuracy force model. The observations equation can be briefly described as
where
is the n-dimensional observation vector and
is the initial state vector. The recursive least-square estimator is adopted in LEO POD and the weighted least-squares can be written as:
where the
matrix is the partial derivatives of the observations concerning the state vector at the reference epoch
,
is the weighting matrix, and
. Generally, the weight of different satellites observations is usually set as the same:
where the
is a priori unit weight factor, which is 0.001m in this study. However, as for the BeiDou system, the precision of GEO satellites orbit is not as good as that of IGSO and MEO satellites. To adopt the GEO satellite observations to improve the reliability of the Luojia-1A precise orbit and reduce the effect from the orbit error of GEO satellites, the strategy of estimation that reduces the weight of GEO satellites observations are proposed in this study. To fully discover the effect of the reduced weight strategy, six different weighting strategies are designed and listed in
Table 4. In this study, the IGSO and MEO satellites are treated as the equal-weighted, and the weight of GEO satellite observations is relative to the IGSO and MEO satellite observations; all the IGSO and MEO satellite observations are set unit weight.
The precise orbit determination results of the Luojia-1A satellite with six different weighting strategies are listed in
Table 5, and the equal weight of all satellites strategy is used as the reference; the LEO POD precision can be improved by re-weighting the GEO satellite observations. According to the results, the strategy that reduces the weight of GEO satellites can improve the BDS based Luojia-1A satellite POD significantly. As the weight reduces to 1/49, the improvement of precision can reach 44.21%. Moreover, as the weight of GEO satellites is reduced, the precision of Luojia-1A orbit is also improved gradually. Luojia-1A satellite orbit precision can be improved to 2.316 cm in the 3D direction by reducing the GEO satellite weight down to 1/900, in which the RMS of radial direction is better than 1 cm and the improvement is 63.43% refers to the equal-weight strategy. The POD precision will not be continuously improved as the GEO satellite weight reduces to 1/2500. Therefore, 1/900 is considered as the optimal GEO weighting strategy for the Luojia-1A satellite POD.
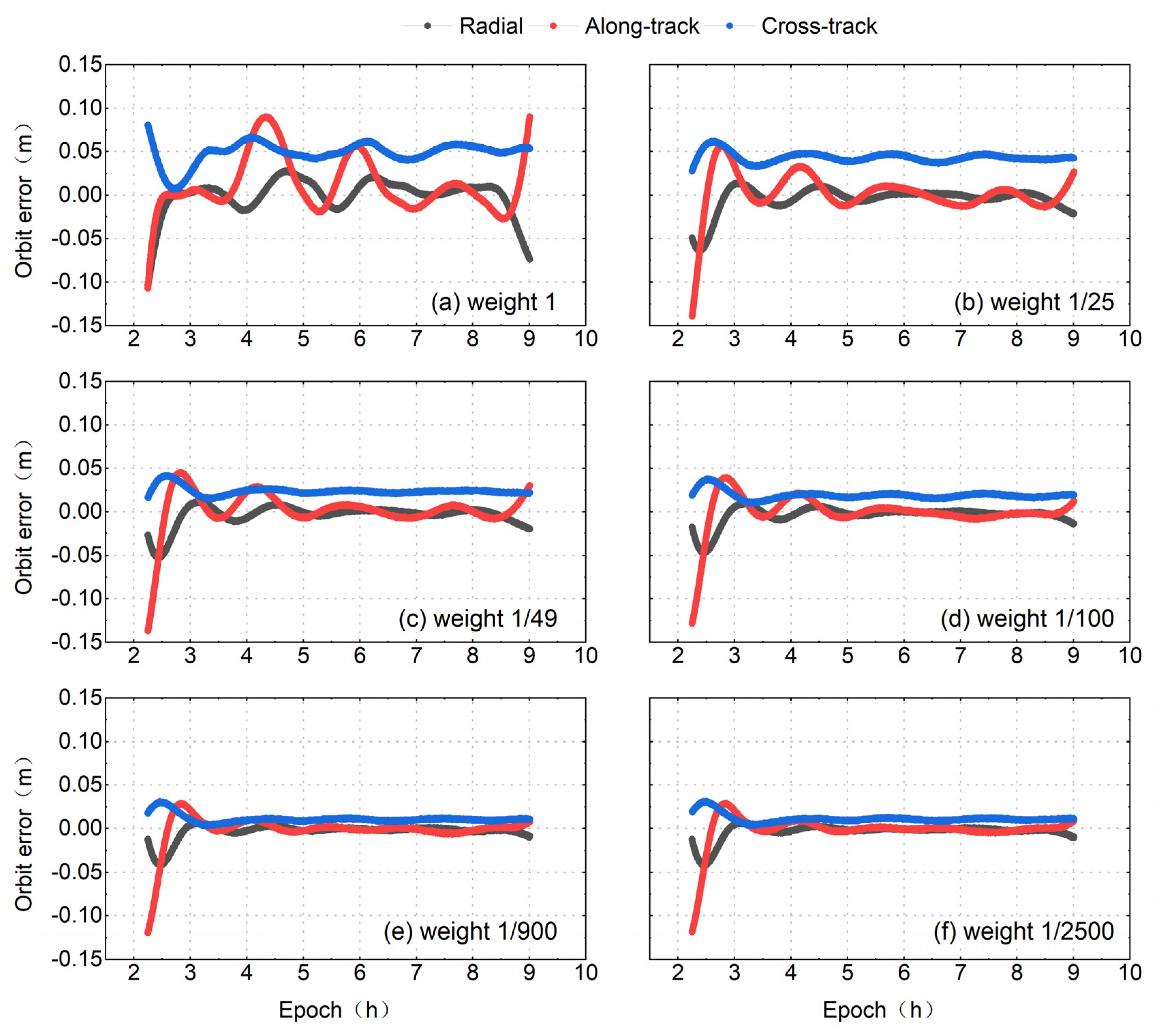
The overlapping orbit comparison result of the Luojia-1A satellite precise orbit is shown in
Figure 9, which represents the LEO orbit computed from the different GEO weighting strategies. The panel (a) presents the overlapped orbit residuals for the all satellite equally weighted cases. The figure shows that orbit presents systematical biases for the whole arc and significant fluctuation presence, especially at the end of the arc. As the weight of the GEO satellites is reduced to 1/25, the fluctuation of orbit error series is dramatically mitigated, but the constant bias on the cross-track direction is still present. Further reducing the weight of the GEO satellites can reduce the constant bias in the cross-track direction. A weight of 1/900 for the GEO satellites is considered as the optimal choice for the Luojia-1A satellite since the orbit error is noticeably reduced and without significant fluctuation. The analysis also indicates that the GEO satellite orbit error may introduce fluctuations and constant bias in the LEO orbit determination.
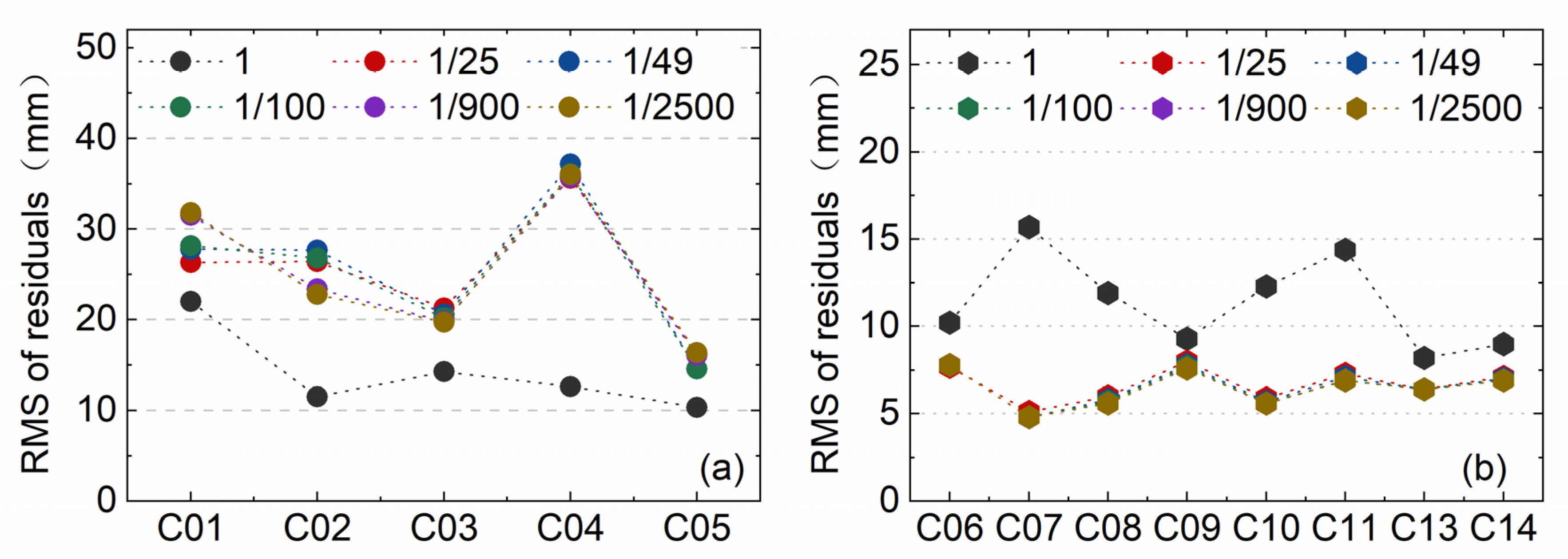
The ionosphere-free carrier phase residuals of Luojia-1A satellite orbit determination under different weight strategy is also analyzed, and the results are presented in
Figure 10. In this analysis, the C12 satellite is excluded in the orbit determine procedure due to the absence of precise orbit products. The figure indicates that for the equal weight strategy, the residuals of GEO satellites achieve a minimum while the IGSO and MEO satellites yield larger residuals. By adopting the re-weighting strategy, the residuals of GEO satellites are slightly increased, which is reasonable since the GEO satellite orbit errors are assimilated into the residuals. Meanwhile, the residuals of IGSO and MEO satellites are decreased to less than 10 mm. Different weighting strategies did not lead to dramatic variation of the carrier phase residuals.
The residuals of observations reflect the consistency of the reduce-dynamic model and the observation model, which can approach noise level if only the reduce-dynamic model can represent the motion of the LEO satellites appropriately. According to experiments, the precise orbit of the Luojia-1A satellite can obtain the best result with the condition that the weight of GEO satellite observations is set 1/900.
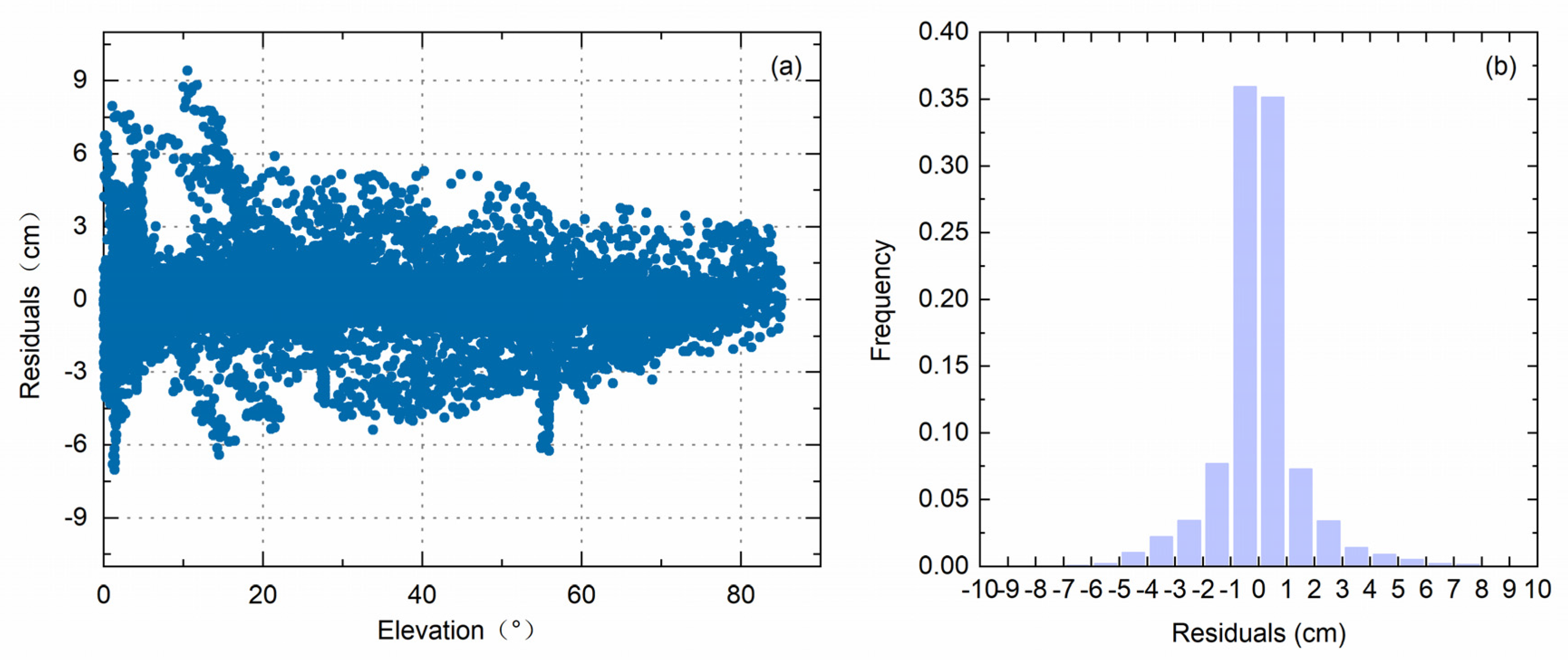
The left panel of
Figure 11 reflects the relationship between the carrier phase residuals and the elevation angle of the optimal results of the Luojia-1A satellite, which indicates that the residuals are elevation-dependent. For the high elevation angle case, the carrier phase residuals are generally less than 3 cm, while the carrier phase residuals with lower elevation angle are generally smaller than 9 cm. The figure also concludes that the residuals are fairly small in most cases. The carrier phase residuals are smaller than 2 cm in most cases; hence, the overall RMS of residuals is 1.49 cm. According to the right panel, it is apparent that over 70% residuals are smaller than 1 cm and over 93.01% residuals are smaller than 3 cm.
5.3. Tuning the Pseudo-Stochastics Parameters
The Luojia-1A is a nanosatellite which only weighs 19.8 kg. Such a nanosatellite has different dynamic characteristics compared to the large satellites. In the reduced dynamic orbit determination, the pseudo-stochastic parameters are introduced into the orbit determination systems to handle the impact of unmodeled forces. The pseudo-stochastic parameter can assimilate the impact of nuisance forces and prevent the orbit solution divergence.
Usually, different types of pseudo-stochastic parameters are introduced for the precise orbit determination, generally including the instantaneous velocity pulse and the piecewise constant acceleration [
30]. The empirical setting of the pseudo-stochastic parameters is adopted in the previous POD experiments, which set up the velocity pulses during the orbit improved procedure and estimate the empirical accelerations in the final POD step. The instantaneous velocity pulses are added every 15 min interval with the prior sigma
. The piecewise constant accelerations with the spacing of 6 min are used to improve the orbit result at the last orbit determination procedure, and the prior sigma is 5 × 10
−9 m/s
2. These pseudo-stochastic parameters are added in the radial, along-track, and out-of-plane directions.
In this section, the effect of pseudo-stochastics parameters on the Luojia-1A precise orbit is analyzed by setting different spacing for both the instantaneous velocity pulses and the empirical accelerations. The basic precise orbit determination strategy is listed in
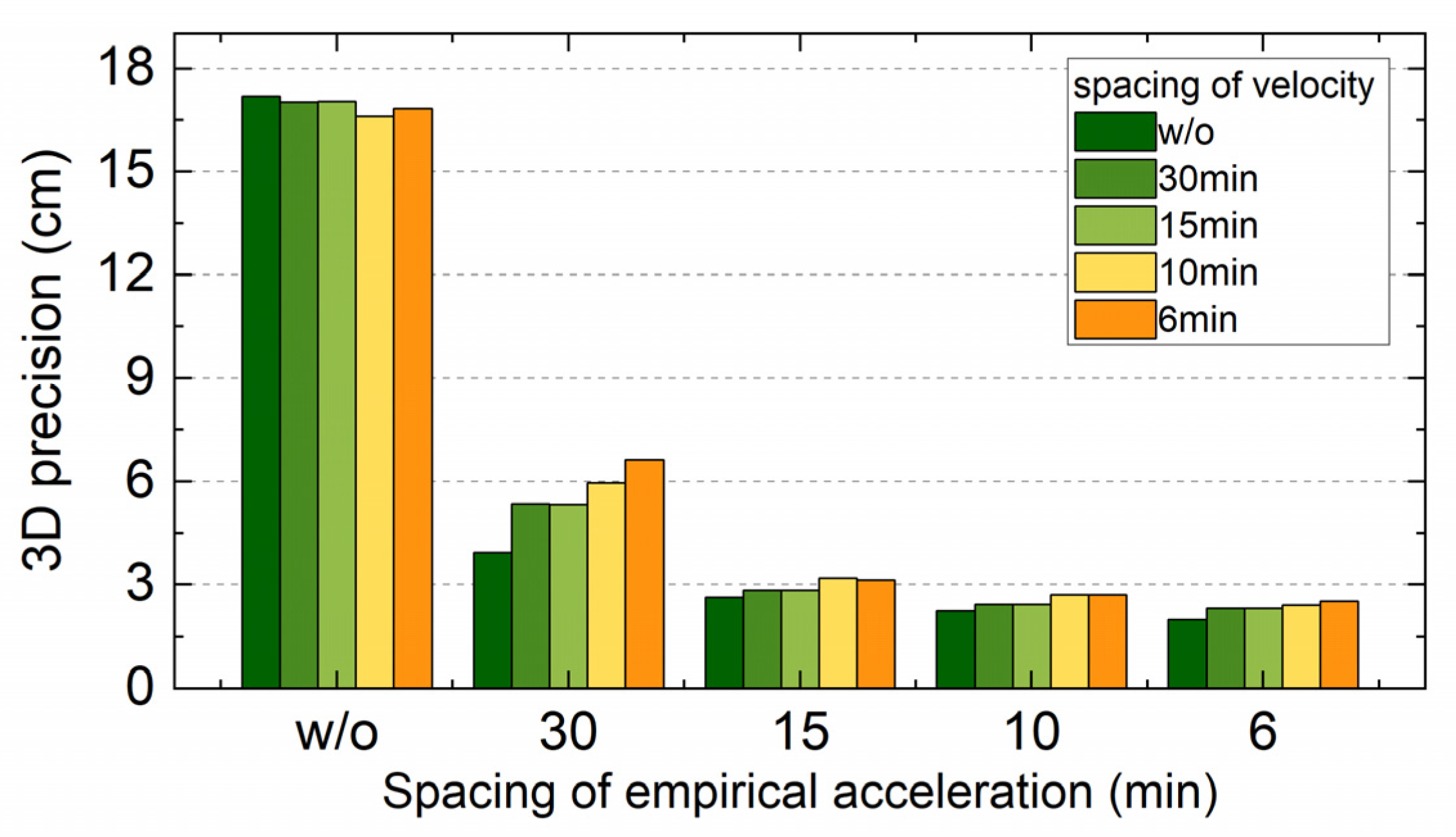
Table 1 and the weight of the GEO satellite observations is set 1/900. Five different scenarios of the spacing of pseudo-stochastic parameters are analyzed in this section, including 30 min, 15 min, 10 min, 6 min, and without pseudo-stochastic parameters. The five different spacing strategies are adopted for both the instantaneous velocity pulses and the empirical accelerations. Therefore, there are 25 different mixed strategies in all. The 3D precision of the Luojia-1A precise orbit with different settings for the pseudo-stochastic parameters is shown in
Figure 12. The bottom axis reflects the spacing for the empirical accelerations in the final POD step, whereas the bar in different colors represents different spacing for the instantaneous velocity pulses in the orbit-improved procedure. The figure indicates that the impact of the empirical accelerations is greater than that of the instantaneous velocity pulse. Once the empirical accelerations are absent in the final POD step, the precision of the Luojia-1A orbit is dramatically decreased. The precision is improved significantly even with the sparse parameters of accelerations. According to the results, the shorter spacing adopted for the piece constant acceleration, the more accurate result is obtained. However, there are no pronounced advantages from the instantaneous velocity pulse for precise orbit determination of the Luojia-1A satellite. The optimal result of the Luojia-1A satellite accessed by adopting the strategy with 6 min interval piecewise-constant accelerations parameters and without instantaneous velocity pulse, which achieves the precision of nearly 2 cm in 3D direction. The empirical strategy adopted in the previous experiments can achieve the near-optimal result.
As shown in
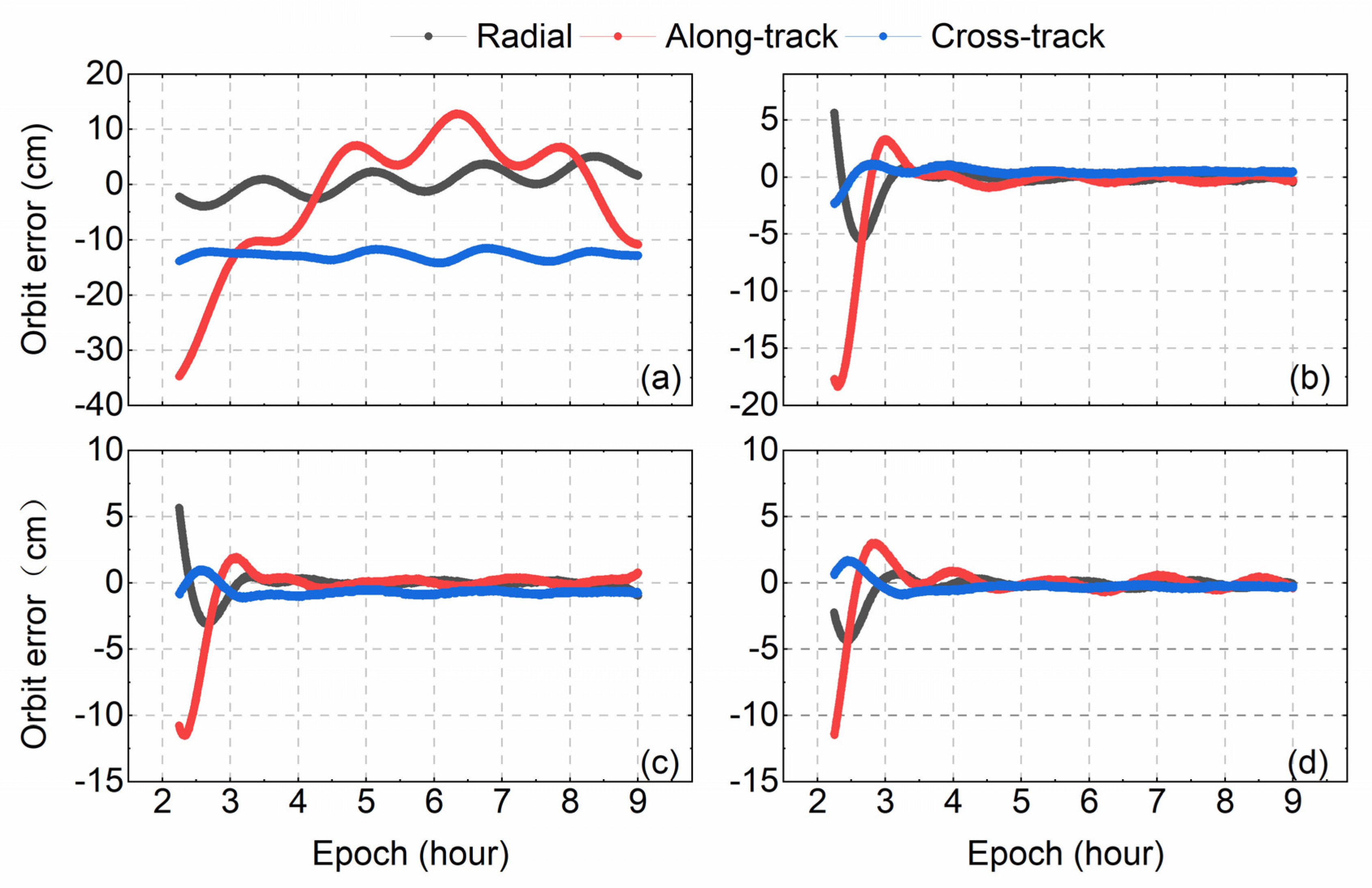
Figure 12, the piece constant acceleration is crucial for the precise orbit determination of the Luojia-1A satellite. Therefore, the results of the strategies with different spacing of the piecewise constant accelerations but without the instantaneous velocity pulse are further analyzed. The statistic results of Luojia-1A satellite orbit in the radial, along-track, and cross-track directions are listed in
Table 6, and the detail of the orbit error is shown in
Figure 13. Panel (a) shows the error of the Luojia-1A satellite orbit without adding any pseudo-stochastic parameters. The fluctuation of the along-track error is pronounced, in which the error of the start epoch is larger than 30 cm. In the cross-track direction, there is nearly 10 cm constant error. As shown in the other three panels, the errors of three directions are reduced by adding the pseudo-stochastic parameters. The shorter spacing that the piece constant parameters are set, the more precise the result of Luojia-1A satellite orbit achieved, especially in the beginning of overlap comparison.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}