The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk

 ,
,  , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
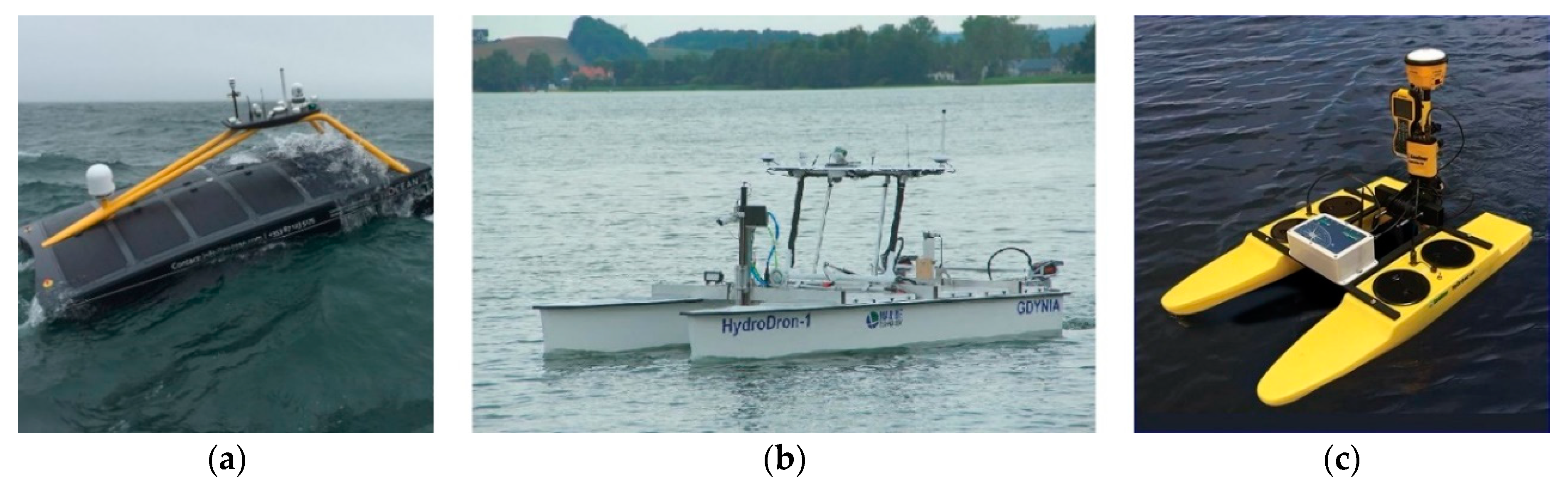
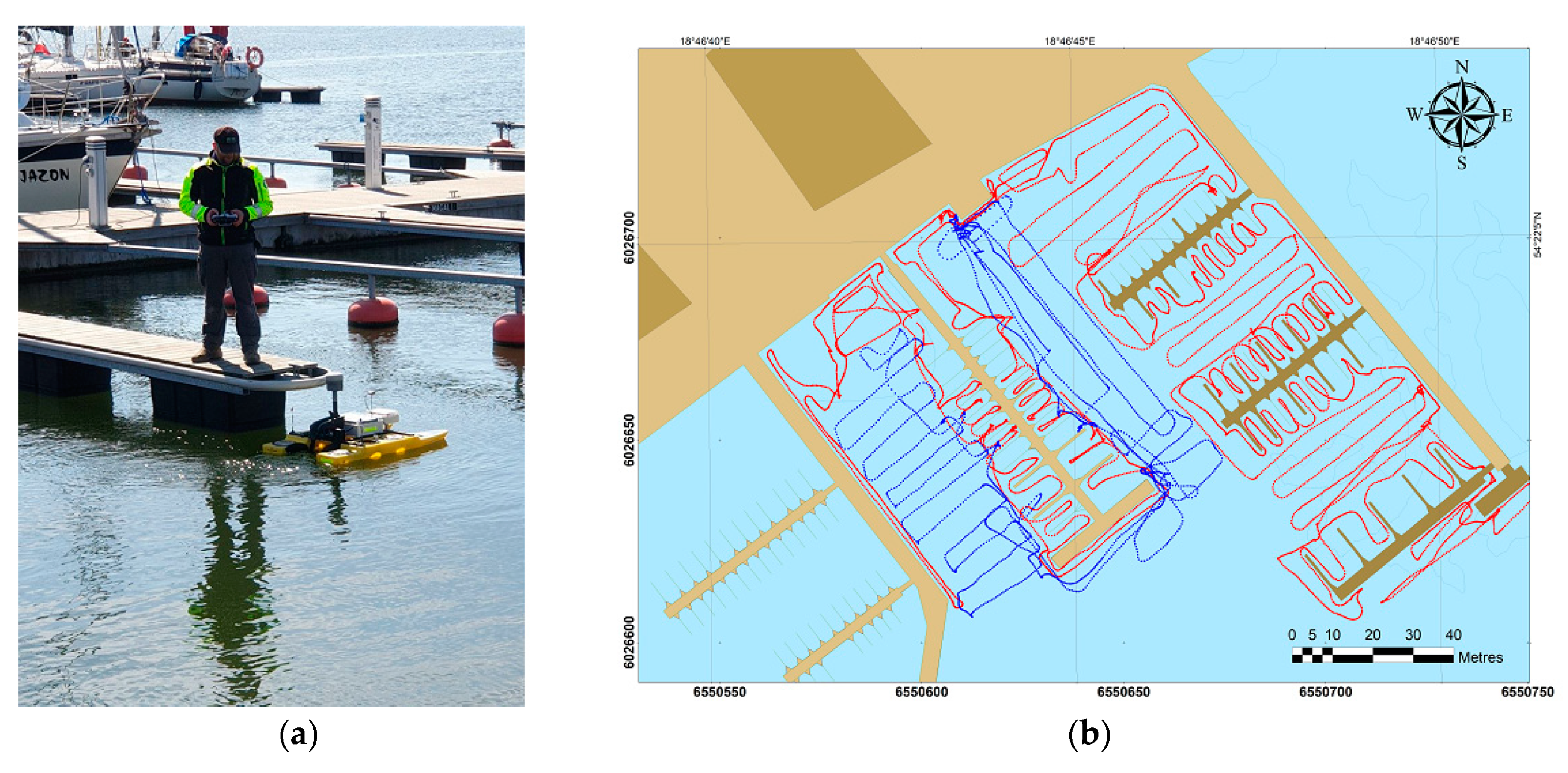
2.1. Measurement Equipment
- Calibration (taring) of the vertical echo sounder.
- Measurement of the vertical distribution of the speed of sound in water.
- Measurement of the draft of the echo sounder transducer.
- Inclinometer calibration.
- Magnetometer calibration.
- —normal height of the point measured by the echo sounder in the PL-KRON86-NH height system (cm),
- —depth measured by the echo sounder (cm),
- —draft of the echo sounder transducer (cm),
- —a depth correction referred to the chart datum in the PL-KRON86-NH height system (cm), which needs to be added where the averaged sea level () does not exceed 508 cm; otherwise, it needs to be subtracted.
2.2. Measurement Site
2.3. Measurement Concept
- Bathymetric measurements of the NSC-GUPES yacht port basins using an USV.
- Inventory geodetic measurements of the quays using a Topcon HiPer II GNSS Receiver with a Sokkia SHC-25 controller operating in the TPI NETpro network, using the NET RTCM 3.0 service with a virtual reference station.
- Laser scanning of the port infrastructure using a Trimble TX8 laser scanner.
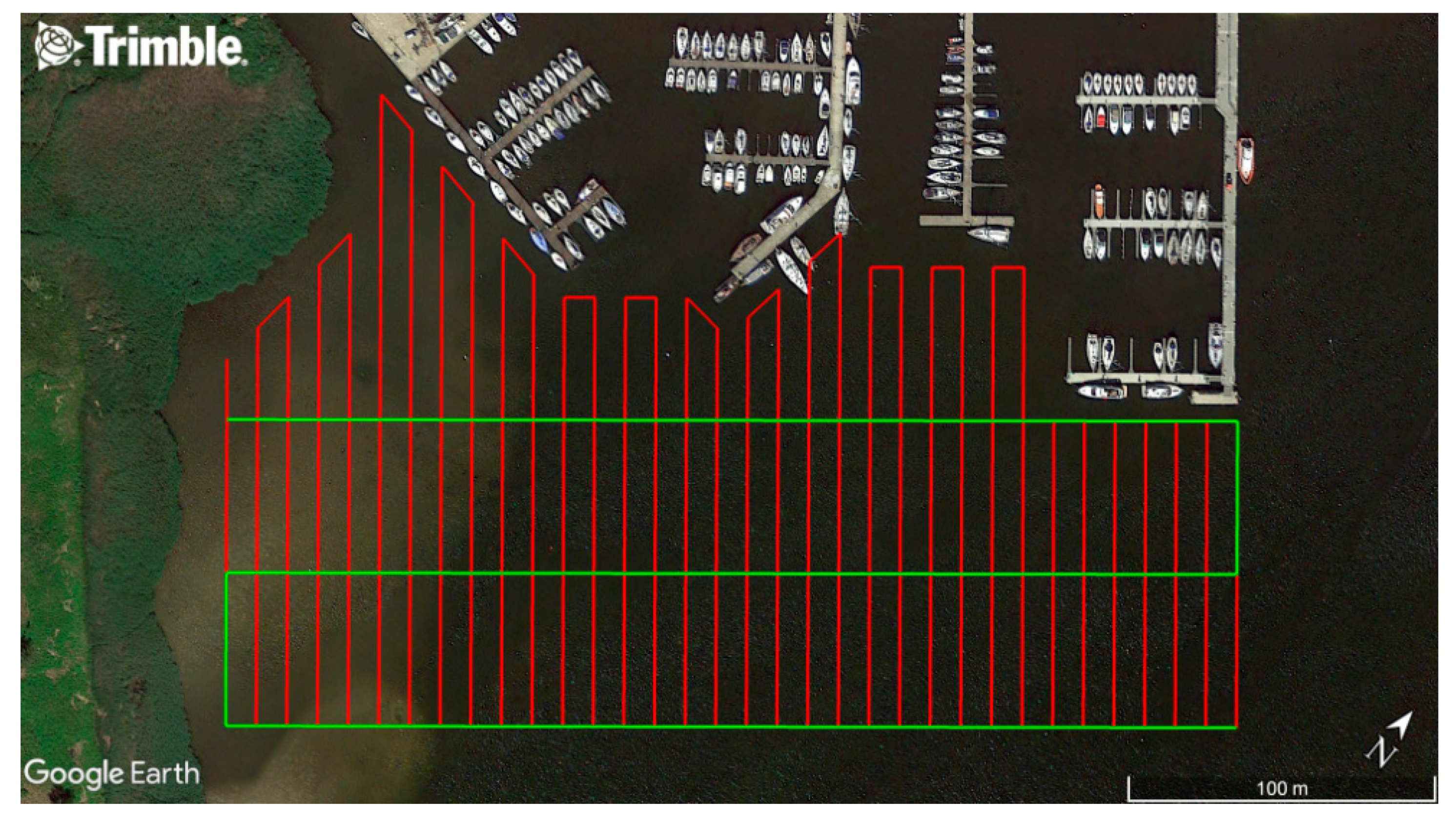
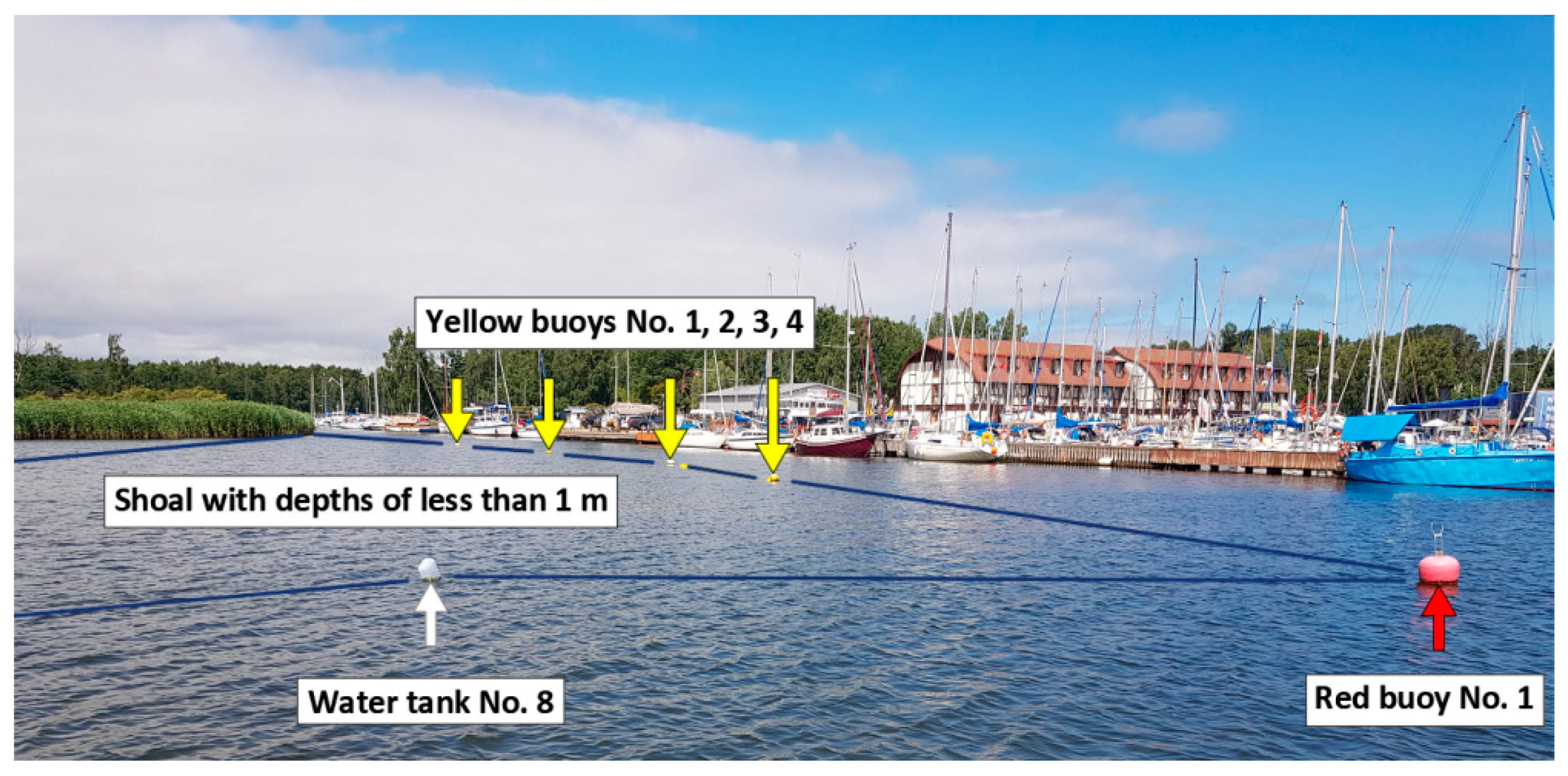
- Inventory surveys of the navigation marks on the shoal adjacent to the Green Islands, using a Trimble R10 GNSS receiver, as well as the Navigator One AMG vessel.
- A photographic inventory of the navigation marks in the waterbody, from the entrance beacons to the Vistula Śmiała River, through the approach fairway, along the harbors of the northern part of the backwater.
2.4. Measurements
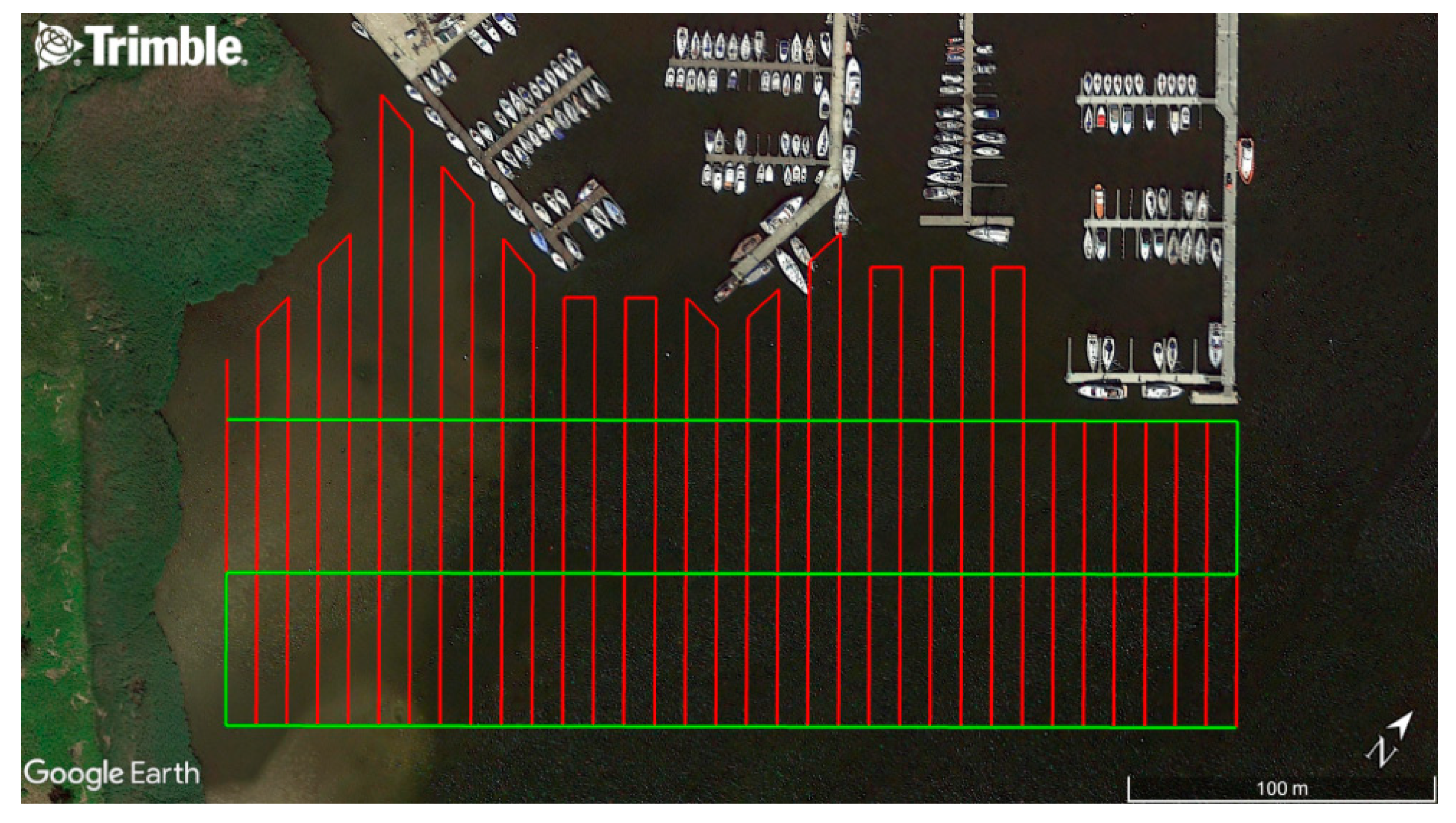
2.4.1. Hydrographic Surveys Using an USV
2.4.2. Supplementary Bathymetric and Geodetic Measurements
3. Results
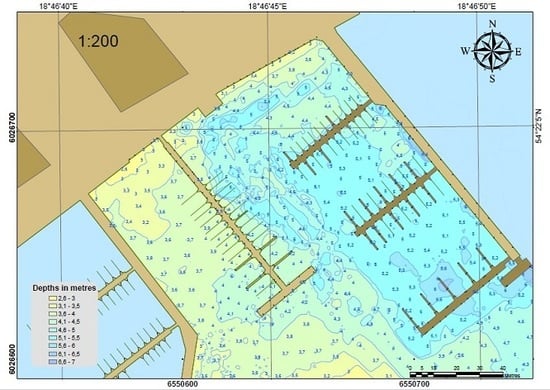
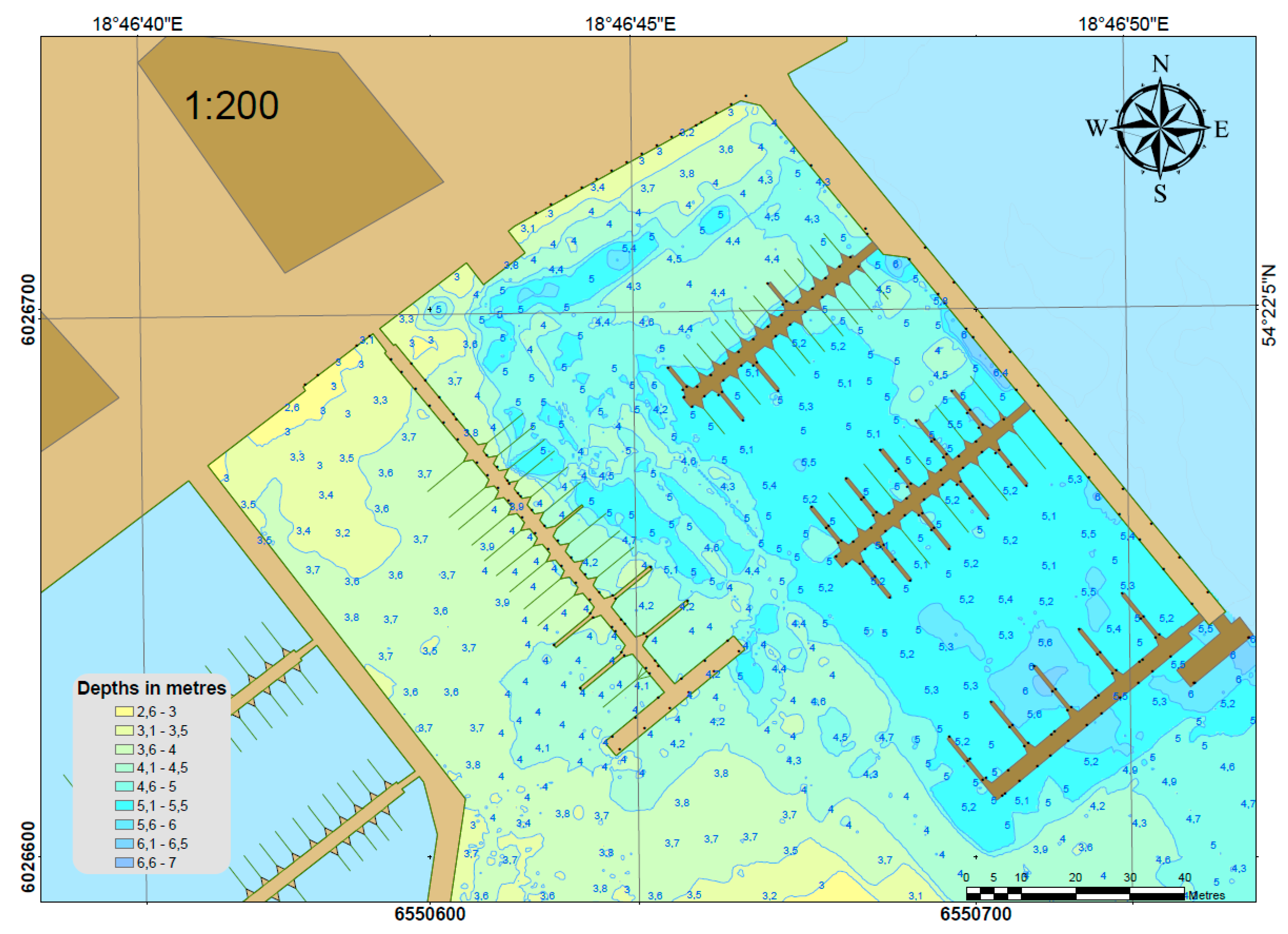
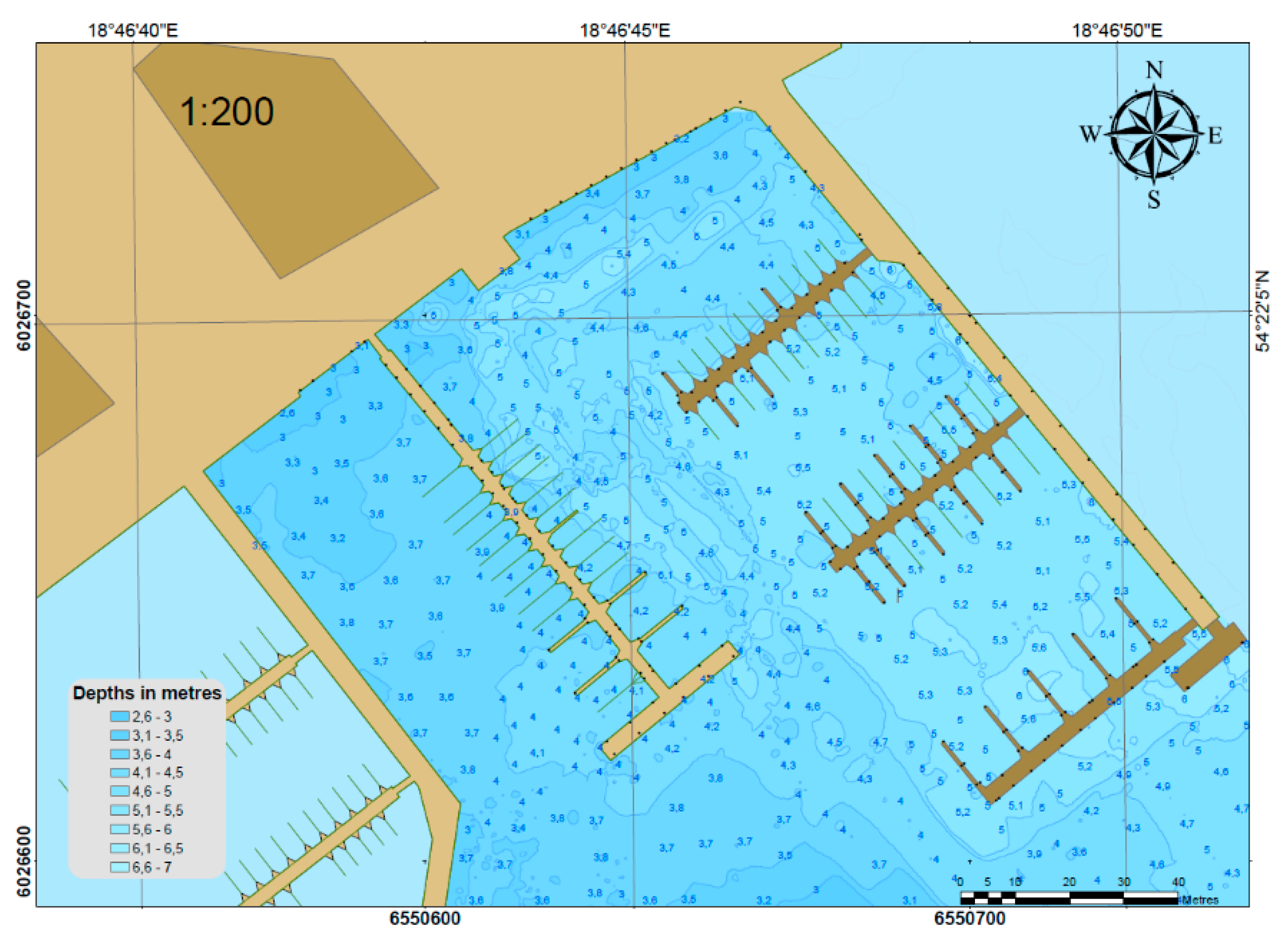
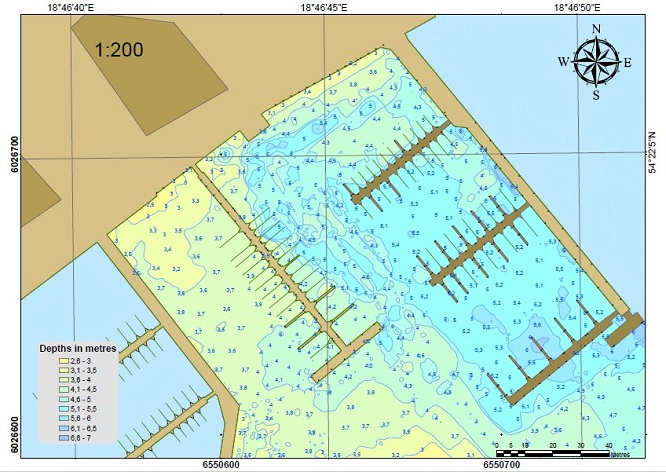
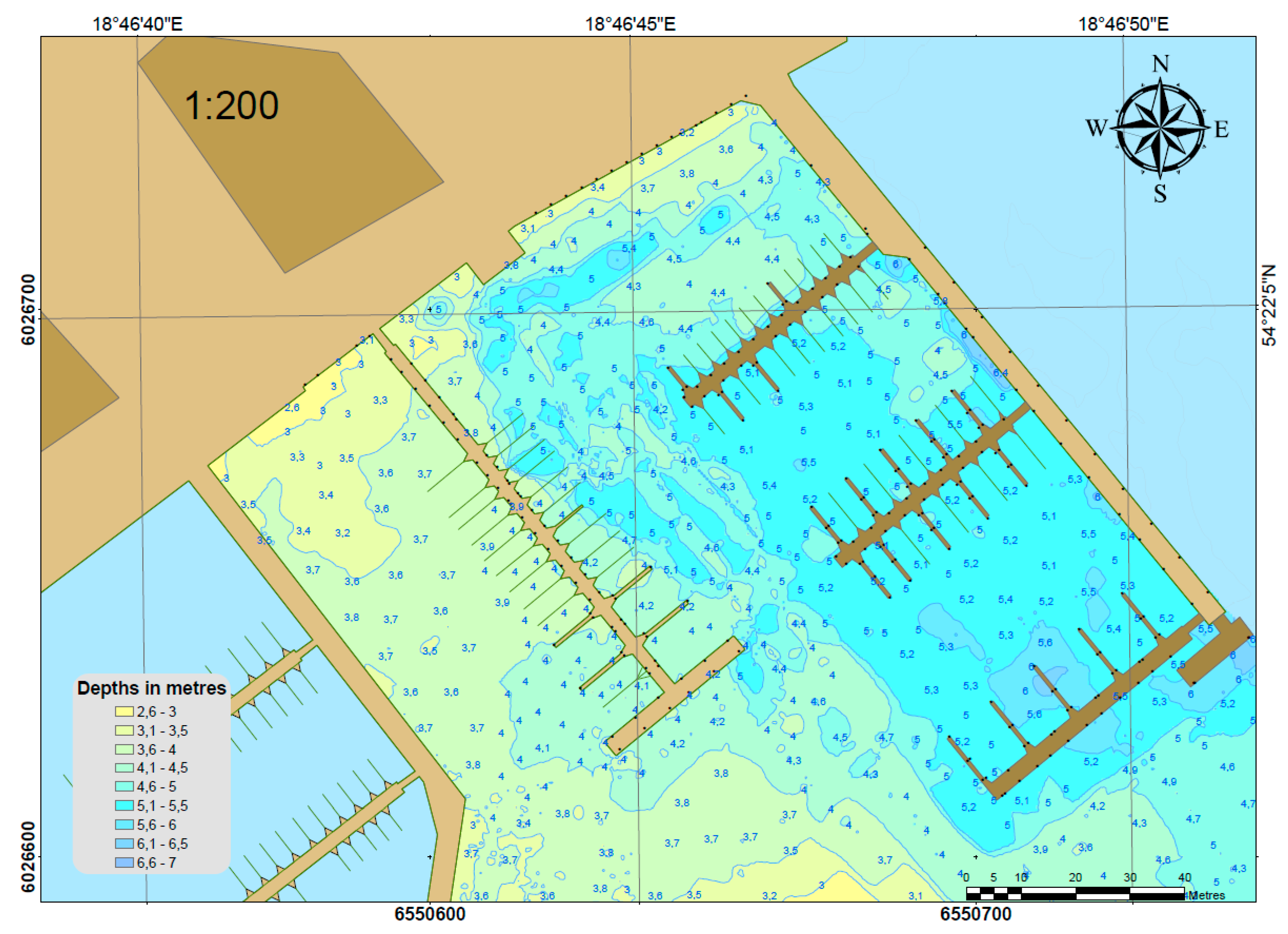
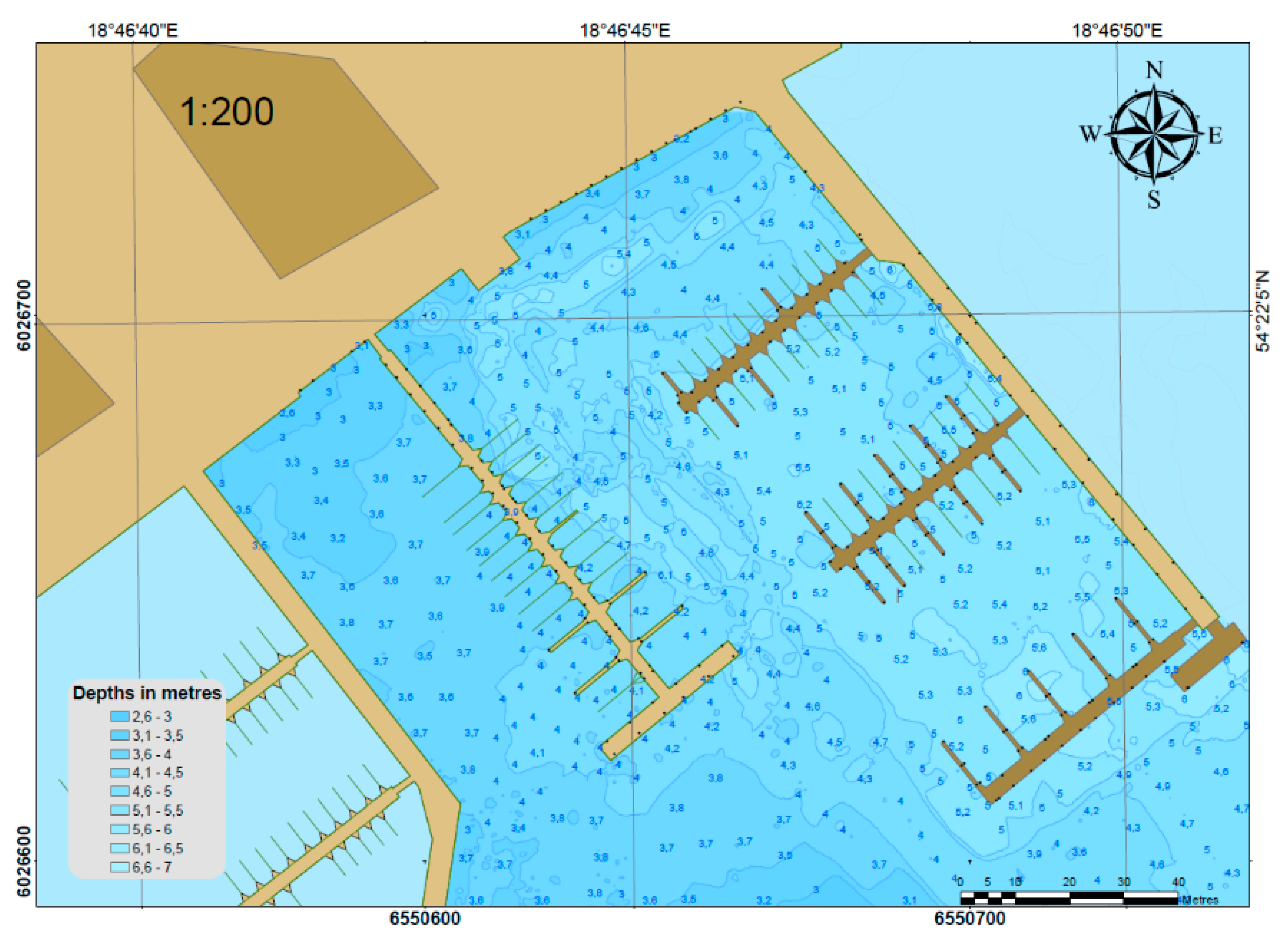
- A navigational chart of the yacht port developed in the UTM system, at a scale of 1:200, with an isobath spacing of 0.5 m and depth data density of 10 m2. Its intended purpose was to provide information, which arose from the need to inform entering vessels about the current water level in the marina (Figure 10).
- A bathymetric chart, i.e., a map of the yacht port with a scale of 1:200, devoid of isobaths with a depth data density of 2 m2. Thanks to bathymetric data, including depths at particular berths, this was intended for the management of berths in the harbor. This would allow the harbor master to assign berths to the yachts entering the harbor, on the basis of their draft. Moreover, it enabled the management of navigability in the yacht port, which is associated with the need to maintain specified depths at the marina (Figure 11).
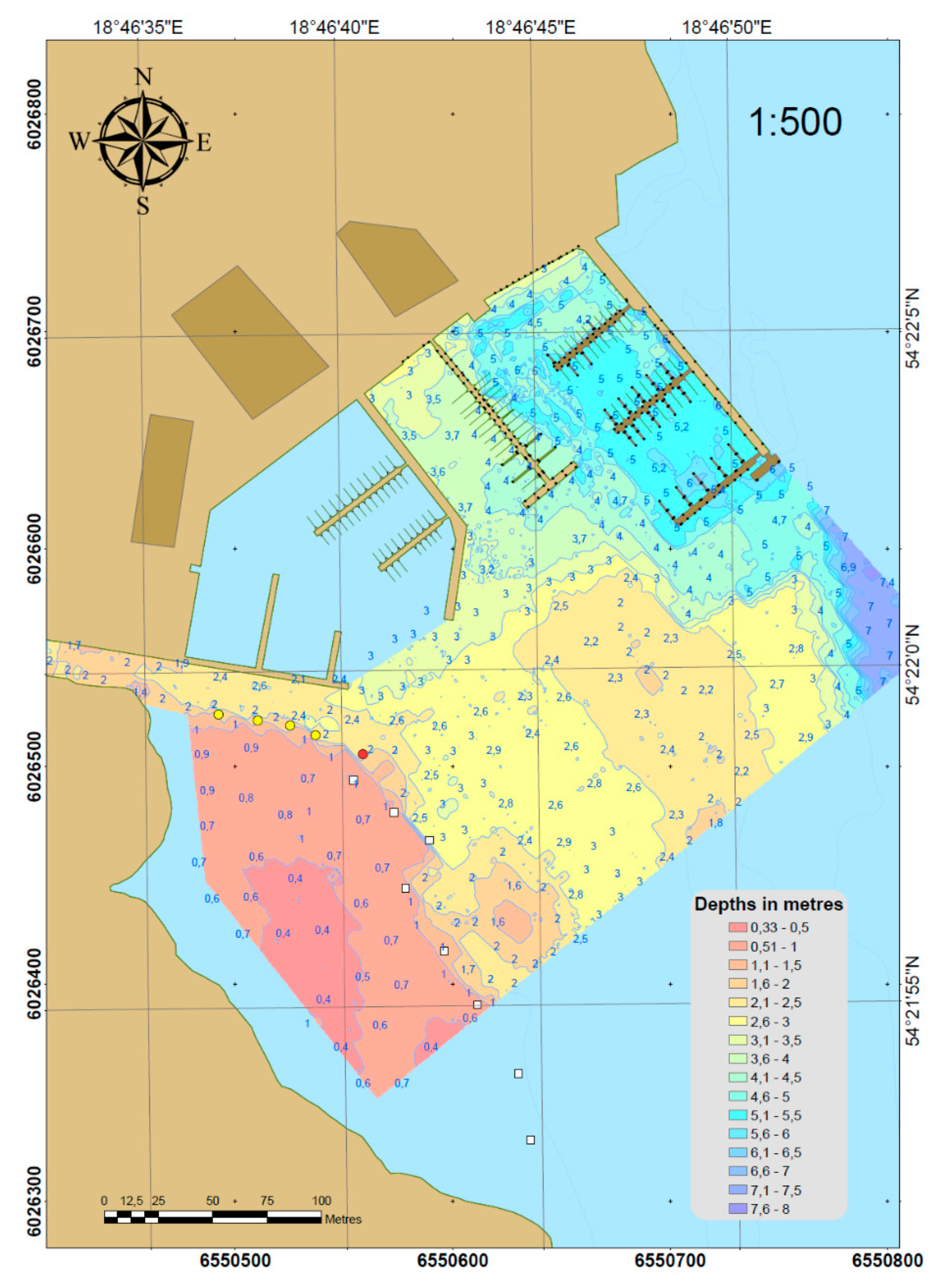
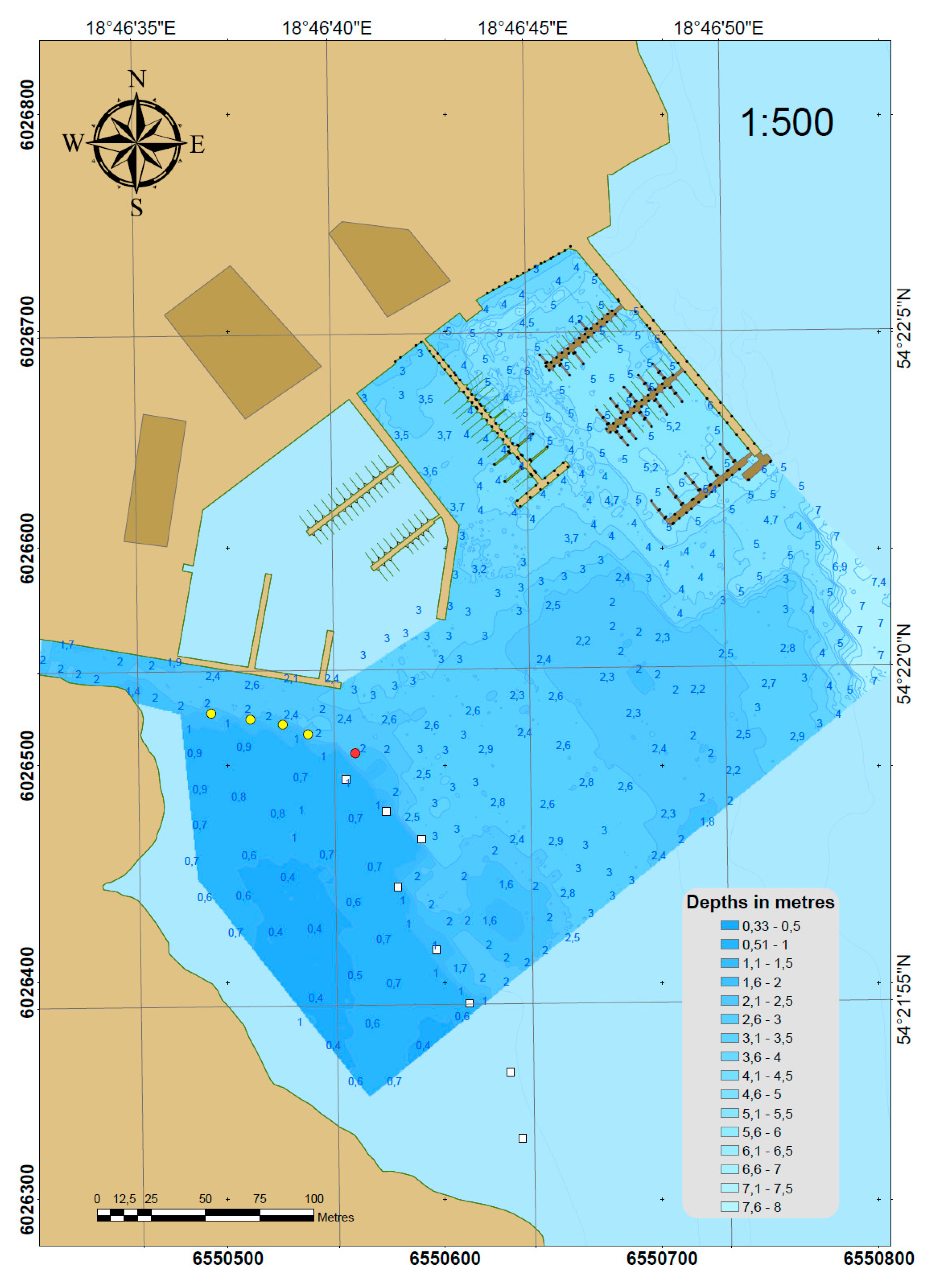
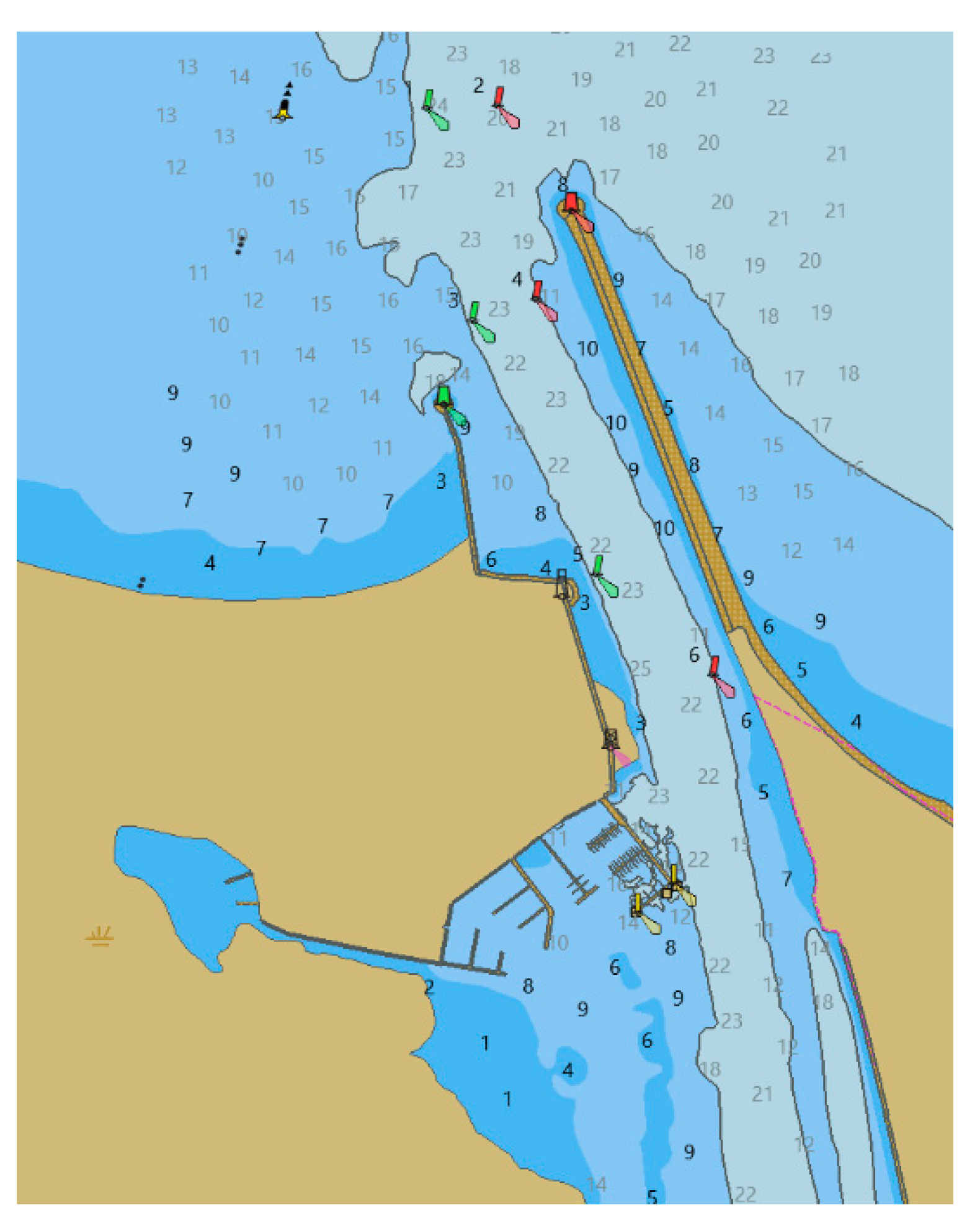
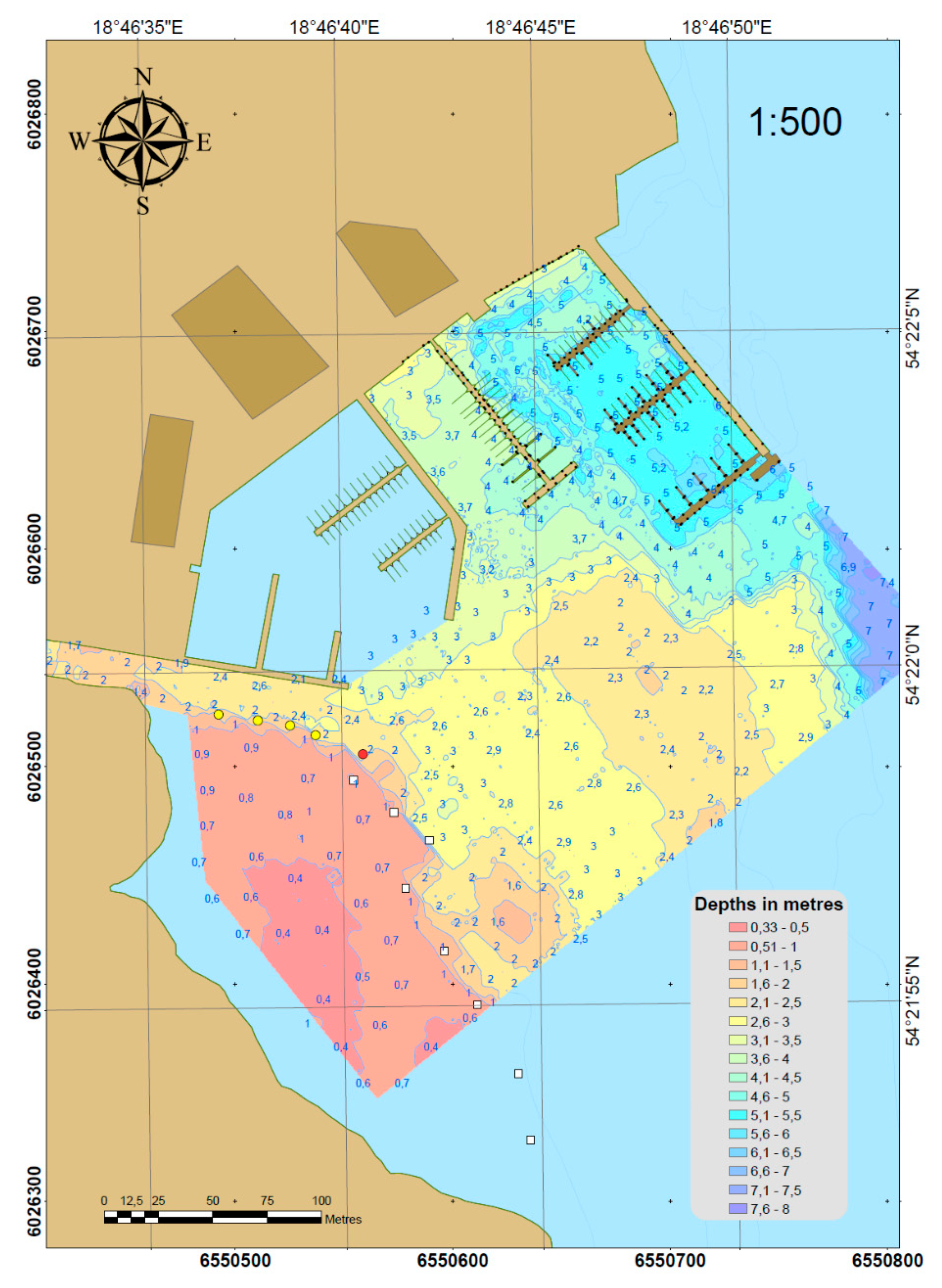
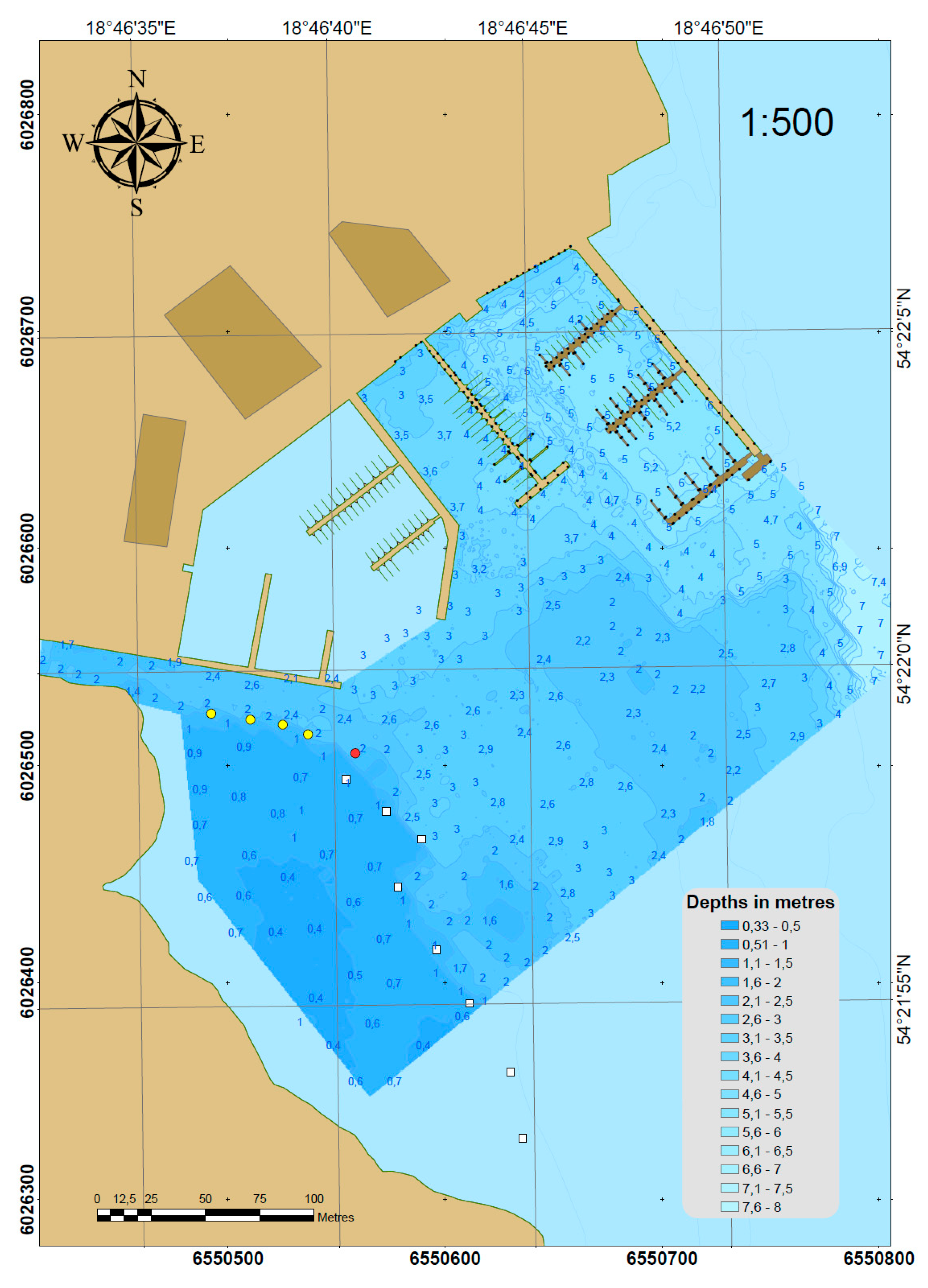
- A navigational chart of the yacht port approach fairway, including the waterbody of the Green Islands shoal, developed in the UTM system at a scale of 1:500, with an isobath spacing of 0.5 m and depth data density of 10 m2. This was designed to ensure the navigation safety on the approach fairway (Figure 12).
- A bathymetric chart, i.e., a map of the approach fairway with a scale of 1:500, devoid of isobaths with a depth data density of 2 m2. Thanks to bathymetric data, including depths at particular berths, this was intended for the management of navigability in the marina approach fairway and of the navigation marking systems in the area surrounding the yacht port (Figure 13).
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating Sensors into a Marine Drone for Bathymetric 3D Surveys in Shallow Waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [Green Version]
- Mattei, G.; Troisi, S.; Aucelli, P.P.C.; Pappone, G.; Peluso, F.; Stefanile, M. Sensing the Submerged Landscape of Nisida Roman Harbour in the Gulf of Naples from Integrated Measurements on a USV. Water 2018, 10, 1686. [Google Scholar] [CrossRef] [Green Version]
- International Hydrographic Organization. Manual on Hydrography, 1st ed.; Publication C-13; IHO: Monte Carlo, Monaco, 2005.
- National Oceanic and Atmospheric Administration. NOS Hydrographic Surveys Specifications and Deliverables; NOAA: Silver Spring, MD, USA, 2017.
- United States Army Corps of Engineers. EM 1110-2-1003 USACE Standards for Hydrographic Surveys; USACE: Washington, DC, USA, 2013. [Google Scholar]
- Canadian Hydrographic Service. CHS Standards for Hydrographic Surveys, 2nd ed.; CHS: Ottawa, ON, Canada, 2013. [Google Scholar]
- International Hydrographic Organization. IHO Standards for Hydrographic Surveys, 5th ed.; Special Publication No. 44; IHO: Monte Carlo, Monaco, 2008.
- Specht, C.; Świtalski, E.; Specht, M. Application of an Autonomous/Unmanned Survey Vessel (ASV/USV) in Bathymetric Measurements. Pol. Marit. Res. 2017, 24, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Grońska, D.; Motyl, W. Hydrodron—New Step for Professional Hydrography for Restricted Waters. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- Breivik, M. Topics in Guided Motion Control of Marine Vehicles. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2010. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. System-theoretic Approach to Safety of Remotely-controlled Merchant Vessel. Ocean Eng. 2018, 152, 334–335. [Google Scholar] [CrossRef]
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated Survey in Very Shallow Water Using an Unmanned Surface Vehicle. IFAC Pap. 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. ISPRS Int. J. Geo Inf. 2019, 8, 80. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and Experimental Testing of an Unmanned Surface Vehicle with Rudderless Double Thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Romano, A.; Duranti, P. Autonomous Unmanned Surface Vessels for Hydrographic Measurement and Environmental Monitoring. In Proceedings of the FIG Working Week 2012, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Stateczny, A.; Włodarczyk-Sielicka, M.; Grońska, D.; Motyl, W. Multibeam Echosounder and LiDAR in Process of 360-degree Numerical Map Production for Restricted Waters with HydroDron. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of Trajectory Tracking Based on Nonlinear Guidance Logic for Hydrographic Unmanned Surface Vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef] [Green Version]
- Naus, K.; Marchel, Ł.; Szymak, P.; Nowak, A. Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image. Sensors 2019, 19, 4644. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Li, Q.; Zhang, J.; Xie, Y. Iterative Learning-based Path and Speed Profile Optimization for an Unmanned Surface Vehicle. Sensors 2020, 20, 439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nikolakopoulos, K.G.; Lampropoulou, P.; Fakiris, E.; Sardelianos, D.; Papatheodorou, G. Synergistic Use of UAV and USV Data and Petrographic Analyses for the Investigation of Beachrock Formations: A Case Study from Syros Island, Aegean Sea, Greece. Minerals 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned Surface Vehicles: An Overview of Developments and Challenges. Annu. Rev. Control. 2016, 41, 71–93. [Google Scholar] [CrossRef]
- RAND. U.S. Navy Employment Options for UNMANNED SURFACE VEHICLES (USVs). Available online: https://www.rand.org/content/dam/rand/pubs/research_reports/RR300/RR384/RAND_RR384.pdf (accessed on 1 August 2020).
- Specht, M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors 2019, 19, 3860. [Google Scholar] [CrossRef] [Green Version]
- Pasławski, J. Introduction to Cartography and Topography; Nowa Era Publishing House: Wrocław, Poland, 2006. (In Polish) [Google Scholar]
- United States Department of the Navy. The Navy Unmanned Surface Vehicle (USV) Master Plan. Available online: https://www.navy.mil/navydata/technology/usvmppr.pdf (accessed on 1 August 2020).
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [Green Version]
- Makar, A. Dynamic Tests of ASG-EUPOS Receiver in Hydrographic Application. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Albena, Bulgaria, 2–8 July 2018. [Google Scholar]
- Grządziel, A. Results from Developments in the Use of a Scanning Sonar to Support Diving Operations from a Rescue Ship. Remote Sens. 2020, 12, 693. [Google Scholar] [CrossRef] [Green Version]
- Grządziel, A. Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben. Geosciences 2020, 10, 240. [Google Scholar] [CrossRef]
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 15 October 2012 on the National Spatial Reference System; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2012. (In Polish)
- Specht, C.; Lewicka, O.; Specht, M.; Dąbrowski, P.; Burdziakowski, P. Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland. J. Mar. Sci. Eng. 2020, 8, 384. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dabrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk Using Maritime Dynamic Measurements. J. Navig. 2019, 72, 5755–5787. [Google Scholar] [CrossRef] [Green Version]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS—A Practical Tool to Generate Digital Elevation Models. J. Coast. Res. 2008, 24, 15161–15528. [Google Scholar] [CrossRef]
- Krueger, C.P.; de Souza, A.V. The Geodesy in the Hydography. Rev. Bras. Cartogr. 2014, 66, 1485–1493. [Google Scholar]
- Makar, A. Determination of Inland Areas Coastlines. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Albena, Bulgaria, 2–8 July 2018. [Google Scholar]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A New Method for Determining the Territorial Sea Baseline Using an Unmanned, Hydrographic Surface Vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Makar, A. The Sea Bottom Surface Described by Coons Pieces. Sci. J. Marit. Univ. Szczec. 2016, 45, 187–190. [Google Scholar]
- Sassais, R.; Makar, A. Methods to Generate Numerical Models of Terrain for Spatial ENC Presentation. Annu. Navig. 2011, 18, 69–81. [Google Scholar]
- International Hydrographic Organization. Regulations of the IHO for International (INT) Charts and Chart Specifications of the IHO, 4.8.0th ed.; IHO: Monte Carlo, Monaco, 2018.
- Minister of Maritime Economy. Ordinance of the Minister of Maritime Economy of 23 October 2006 on the Technical Conditions for the Use of Marine Hydrotechnical Structures and the Detailed Scope of Inspections; Minister of Maritime Economy: Warsaw, Poland, 2006. (In Polish)
- Minister of Transport and Maritime Economy. Ordinance of the Minister of Transport and Maritime Economy of 1 June 1998 on the Technical Conditions to Be Met by Marine Hydrotechnical Structures and Their Location; Minister of Transport and Maritime Economy: Warsaw, Poland, 1998. (In Polish)
- National Imagery and Mapping Agency. Department of Defense World Geodetic System 1984, its Definition and Relationships with Local Geodetic Systems, 3rd ed.; NIMA Technical Report TR8350.2; NIMA: Springfield, VA, USA, 2004. [Google Scholar]
- Kadaj, R.J. Polish Coordinate Systems. Transformation Formulas, Algorithms and Softwares. Available online: http://www.geonet.net.pl/images/2002_12_uklady_wspolrz.pdf (accessed on 1 August 2020). (In Polish).
- Deakin, R.E.; Hunter, M.N.; Karney, C.F.F. The Gauss-Krüger Projection. In Proceedings of the 23rd Victorian Regional Survey Conference, Warrnambool, Australia, 10–12 September 2010. [Google Scholar]
- Vrbancich, J.; Hallett, M.; Hodges, G. Airborne Electromagnetic Bathymetry of Sydney Harbour. Explor. Geophys. 2000, 31, 179–186. [Google Scholar] [CrossRef]
- Wilson, K.M.; Power, H.E. Seamless Bathymetry and Topography Datasets for New South Wales, Australia. Sci. Data 2018, 5, 180115. [Google Scholar] [CrossRef] [Green Version]
- Erena, M.; Domínguez, J.A.; Atenza, J.F.; García-Galiano, S.; Soria, J.; Pérez-Ruzafa, Á. Bathymetry Time Series Using High Spatial Resolution Satellite Images. Water 2020, 12, 531. [Google Scholar] [CrossRef] [Green Version]
- Specht, M.; Specht, C.; Lewicka, O.; Makar, A.; Burdziakowski, P.; Dąbrowski, P. Study on the Coastline Evolution in Sopot (2008–2018) Based on Landsat Satellite Imagery. J. Mar. Sci. Eng. 2020, 8, 464. [Google Scholar] [CrossRef]
- Gabr, B.; Ahmed, M.; Marmoush, Y. PlanetScope and Landsat 8 Imageries for Bathymetry Mapping. J. Mar. Sci. Eng. 2020, 8, 143. [Google Scholar] [CrossRef] [Green Version]
- Kimeli, A.; Thoya, P.; Ngisiang’e, N.; Ong’anda, H.; Magori, C. Satellite-derived Bathymetry: A Case Study of Mombasa Port Channel and its Approaches, Kenya. West. Indian Ocean. J. Mar. Sci. 2018, 17, 93–102. [Google Scholar] [CrossRef]
- Mateo-Pérez, V.; Corral-Bobadilla, M.; Ortega-Fernández, F.; Vergara-González, E.P. Port Bathymetry Mapping Using Support Vector Machine Technique and Sentinel-2 Satellite Imagery. Remote Sens. 2020, 12, 2069. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot Using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef] [Green Version]
- Doron, M.; Babin, M.; Mangin, A.; Hembise, O. Estimation of Light Penetration, and Horizontal and Vertical Visibility in Oceanic and Coastal Waters from Surface Reflectance. J. Geophys. Res. 2007, 112, C06003. [Google Scholar] [CrossRef] [Green Version]
- Stramska, M.; Świrgoń, M. Influence of Atmospheric Forcing and Freshwater Discharge on Interannual Variability of the Vertical Diffuse Attenuation Coefficient at 490 nm in the Baltic Sea. Remote Sens. Environ. 2014, 140, 155–164. [Google Scholar] [CrossRef]
- Kasvi, A.; Salmela, J.; Lotsari, E.; Kumpula, T.; Lane, S.N. Comparison of Remote Sensing Based Approaches for Mapping Bathymetry of Shallow, Clear Water Rivers. Geomorphology 2019, 33, 180–197. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Schill, S.R.; Roelfsema, C.; Phinn, S.; Silman, M.; Mascaro, J.; Asner, G.P. Adaptive Bathymetry Estimation for Shallow Coastal Waters Using Planet Dove Satellites. Remote Sens. Environ. 2019, 232, 111302. [Google Scholar] [CrossRef]
- Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors 2019, 19, 2788. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Weintrit, A.; Specht, M. Determination of the Territorial Sea Baseline—Aspect of Using Unmanned Hydrographic Vessels. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 649–654. [Google Scholar] [CrossRef] [Green Version]
- Naus, K.; Marchel, Ł. Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Appl. Sci. 2019, 9, 3530. [Google Scholar] [CrossRef] [Green Version]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. MicroVEGA (Micro Vessel for Geodetics Application): A Marine Drone for the Acquisition of Bathymetric Data for GIS Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 123–130. [Google Scholar] [CrossRef] [Green Version]
- Rowley, J. Autonomous Unmanned Surface Vehicles (USV): A Paradigm Shift for Harbor Security and Underwater Bathymetric Imaging. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Name | X(PL-2000) | Y(PL-2000) | ϕ(WGS-84) | λ(WGS-84) |
|---|---|---|---|---|---|
| 1 | Water tank No.1 | 6026328.223 m | 6550635.838 m | N 54°21’52.99331” | E 18°46’44.63700” |
| 2 | Water tank No. 2 | 6026358.779 m | 6550630.249 m | N 54°21’53.98352” | E 18°46’44.34616” |
| 3 | Water tank No. 3 | 6026390.466 m | 6550611.273 m | N 54°21’55.01510” | E 18°46’43.31460” |
| 4 | Water tank No. 4 | 6026415.014 m | 6550596.046 m | N 54°21’55.81443” | E 18°46’42.48627” |
| 5 | Water tank No. 5 | 6026443.936 m | 6550578.245 m | N 54°21’56.75618” | E 18°46’41.51810” |
| 6 | Water tank No. 6 | 6026466.097 m | 6550589.201 m | N 54°21’57.46896” | E 18°46’42.13844” |
| 7 | Water tank No. 7 | 6026478.828 m | 6550572.951 m | N 54°21’57.88651” | E 18°46’41.24620” |
| 8 | Water tank No. 8 | 6026493.689 m | 6550554.416 m | N 54°21’58.37373” | E 18°46’40.22876” |
| 9 | Red buoy No. 1 | 6026505.642 m | 6550558.684 m | N 54°21’58.75878” | E 18°46’40.47243” |
| 10 | Yellow buoy No. 1 | 6026514.363 m | 6550536.879 m | N 54°21’59.04863” | E 18°46’39.27007” |
| 11 | Yellow buoy No. 2 | 6026518.825 m | 6550525.226 m | N 54°21’59.19707” | E 18°46’38.62739” |
| 12 | Yellow buoy No. 3 | 6026521.14 m | 6550510.325 m | N 54°21’59.27727” | E 18°46’37.80355” |
| 13 | Yellow buoy No. 4 | 6026523.917 m | 6550492.275 m | N 54°21’59.37350” | E 18°46’36.80551” |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, M.; Specht, C.; Szafran, M.; Makar, A.; Dąbrowski, P.; Lasota, H.; Cywiński, P. The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk. Remote Sens. 2020, 12, 2585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12162585
Specht M, Specht C, Szafran M, Makar A, Dąbrowski P, Lasota H, Cywiński P. The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk. Remote Sensing. 2020; 12(16):2585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12162585
Chicago/Turabian StyleSpecht, Mariusz, Cezary Specht, Maciej Szafran, Artur Makar, Paweł Dąbrowski, Henryk Lasota, and Piotr Cywiński. 2020. "The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk" Remote Sensing 12, no. 16: 2585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12162585