Image Collection Simulation Using High-Resolution Atmospheric Modeling

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Image Collection Simulation Using DIRSIG
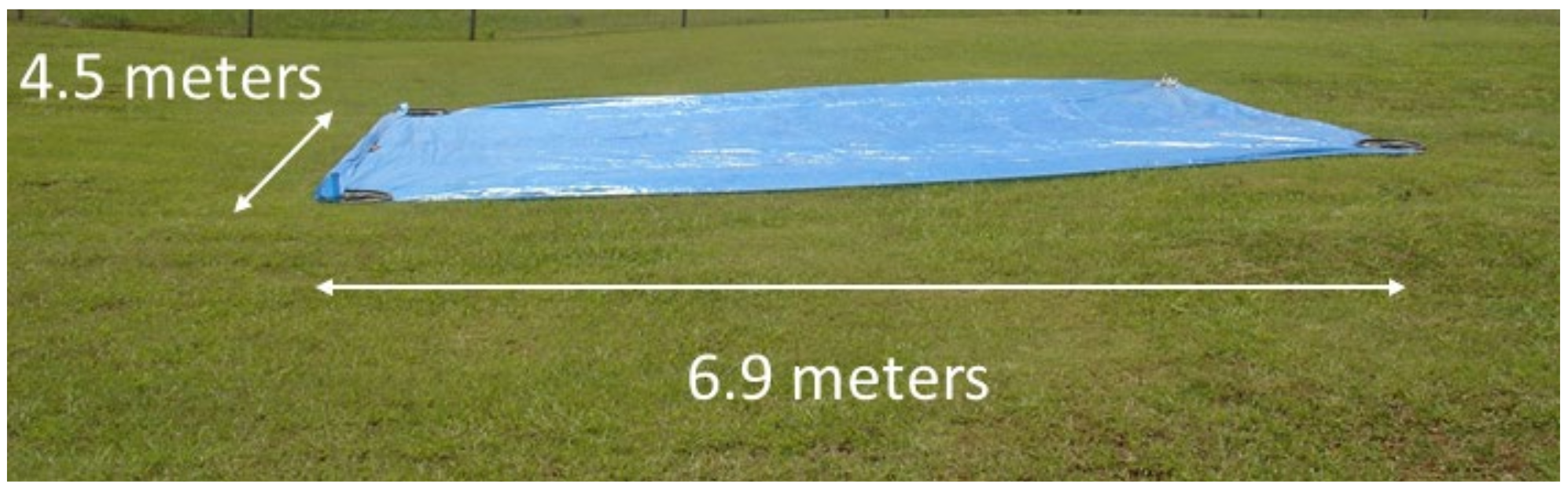
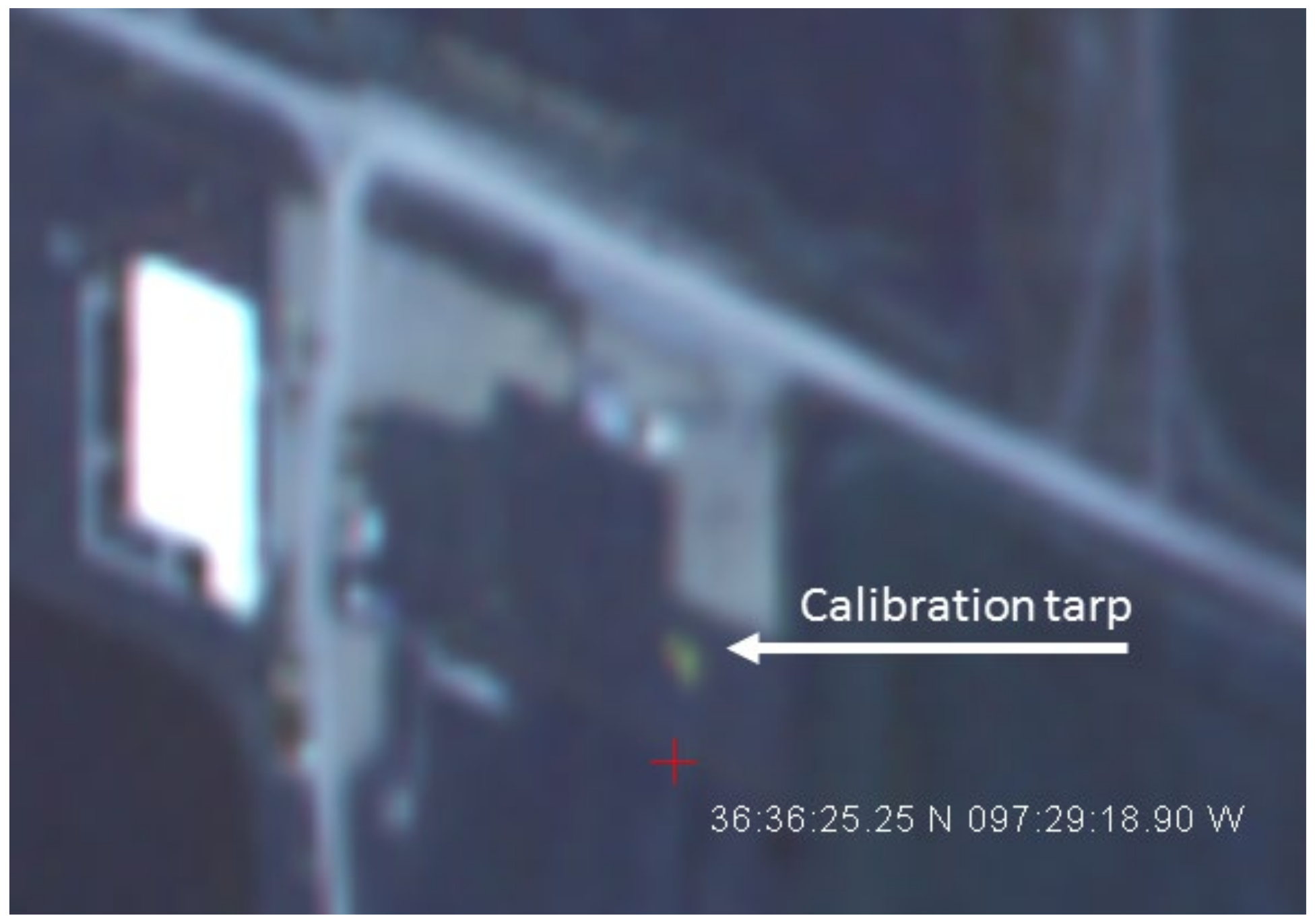
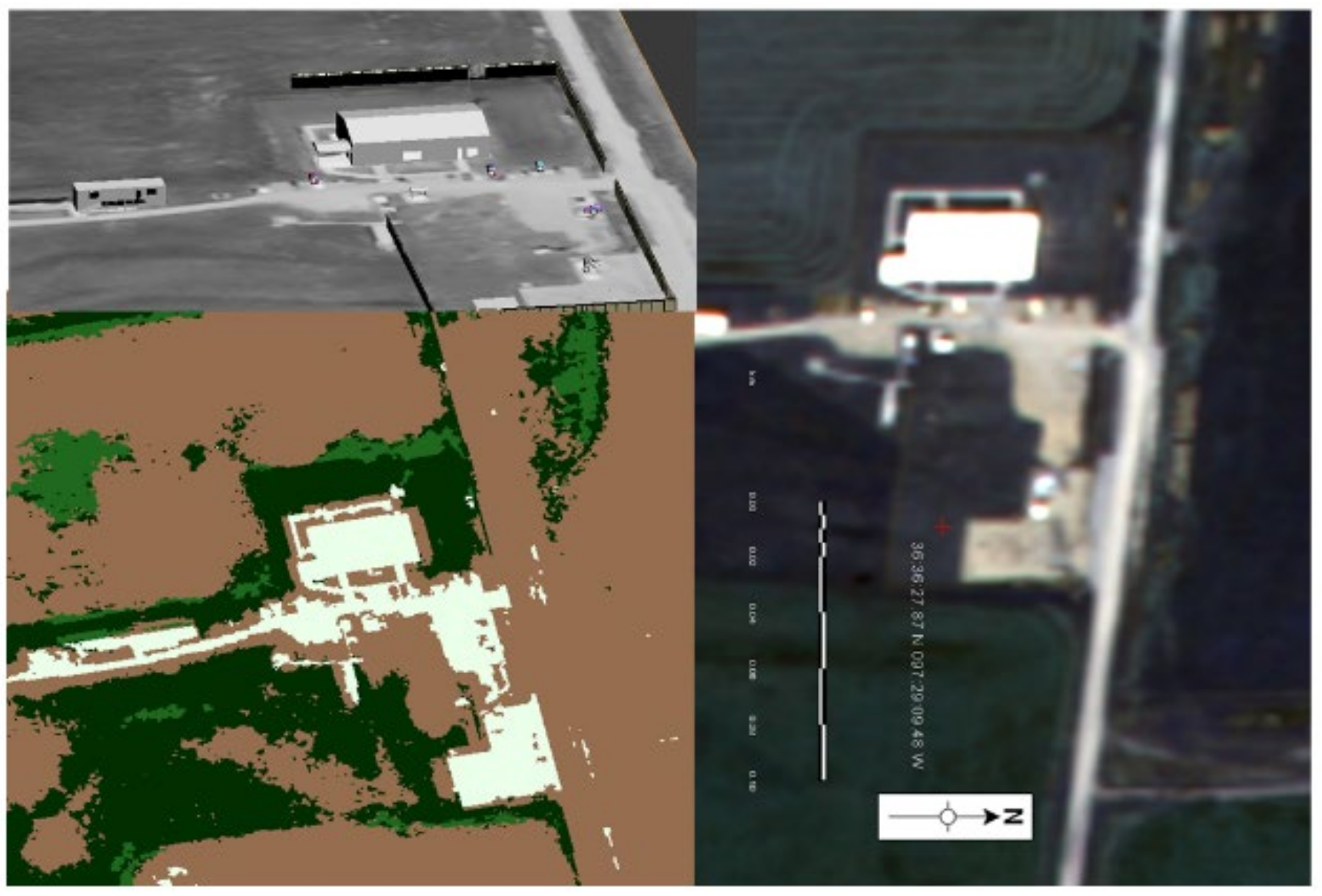
2.2. Ground Truth Experiment Using WorldView-3 Satellite Imagery
2.3. CAD Model
2.4. WorldView-3 Simulation
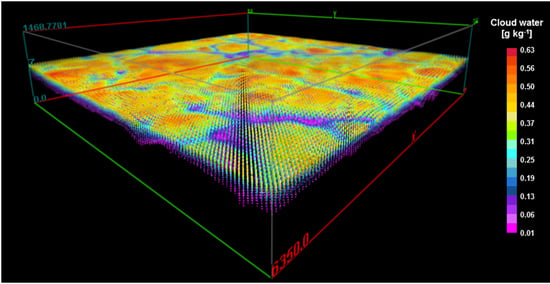
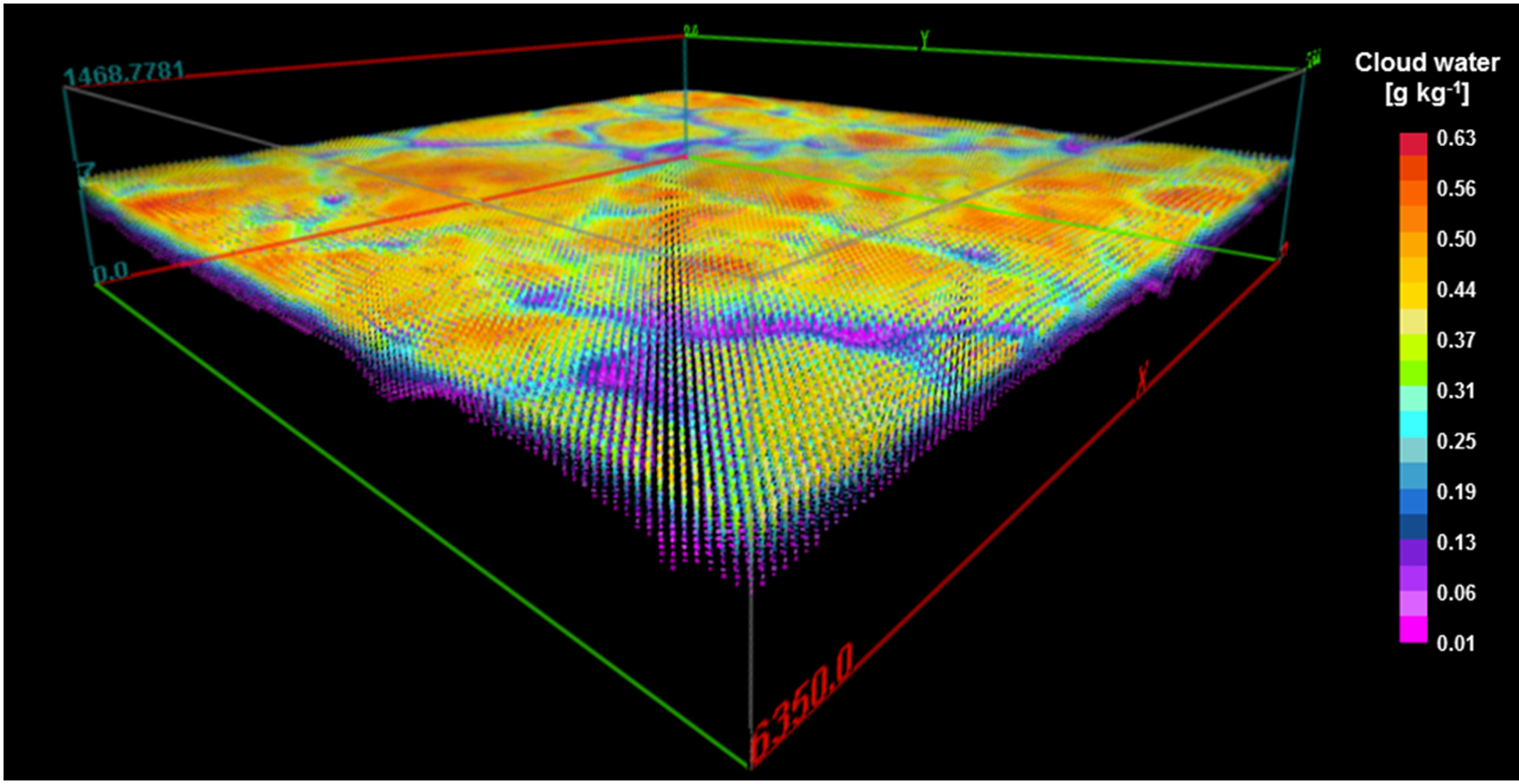
2.5. Atmospheric Model
3. Results
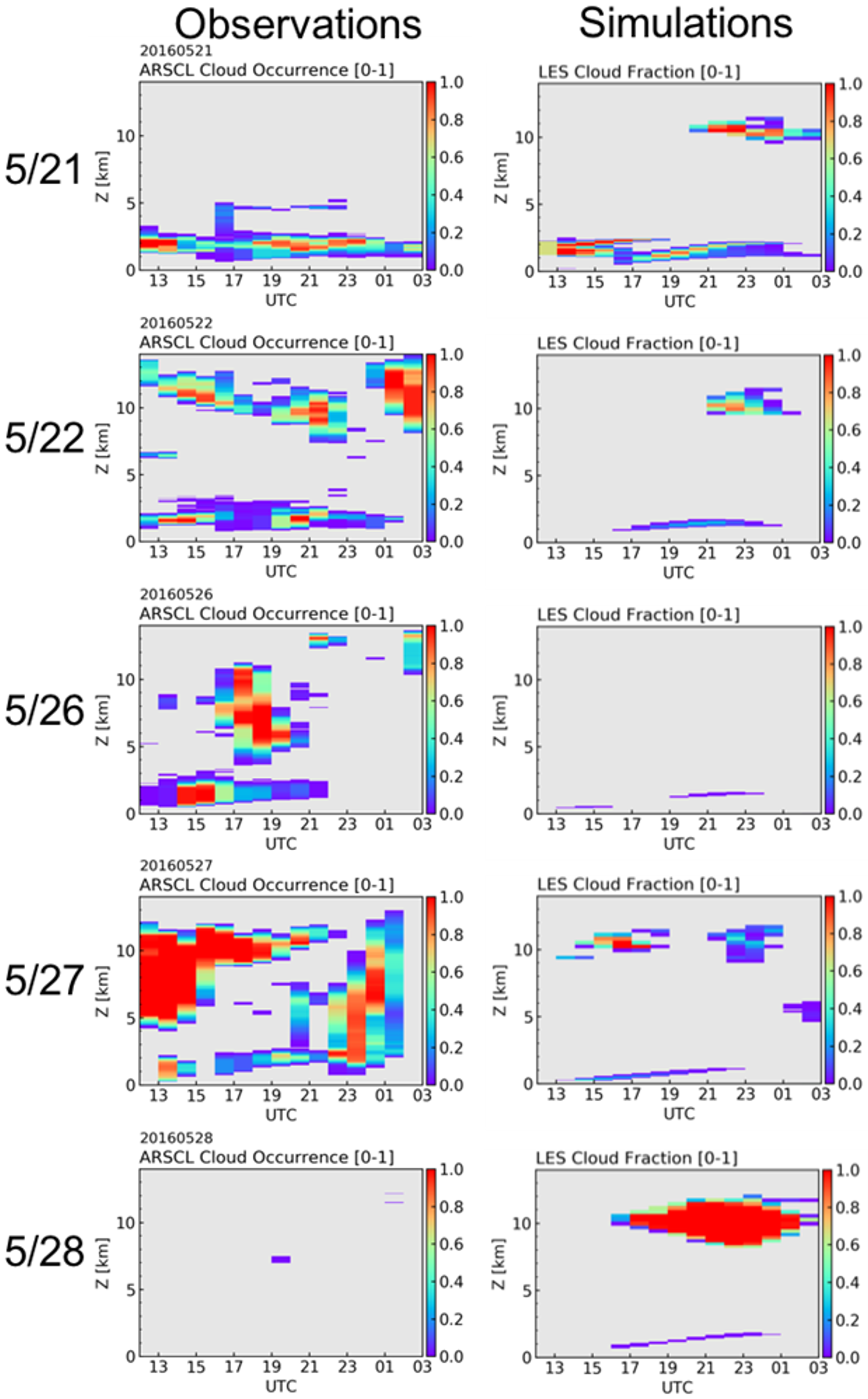
3.1. Comparison of Cloud Measurements and LES Atmospheric Simulation
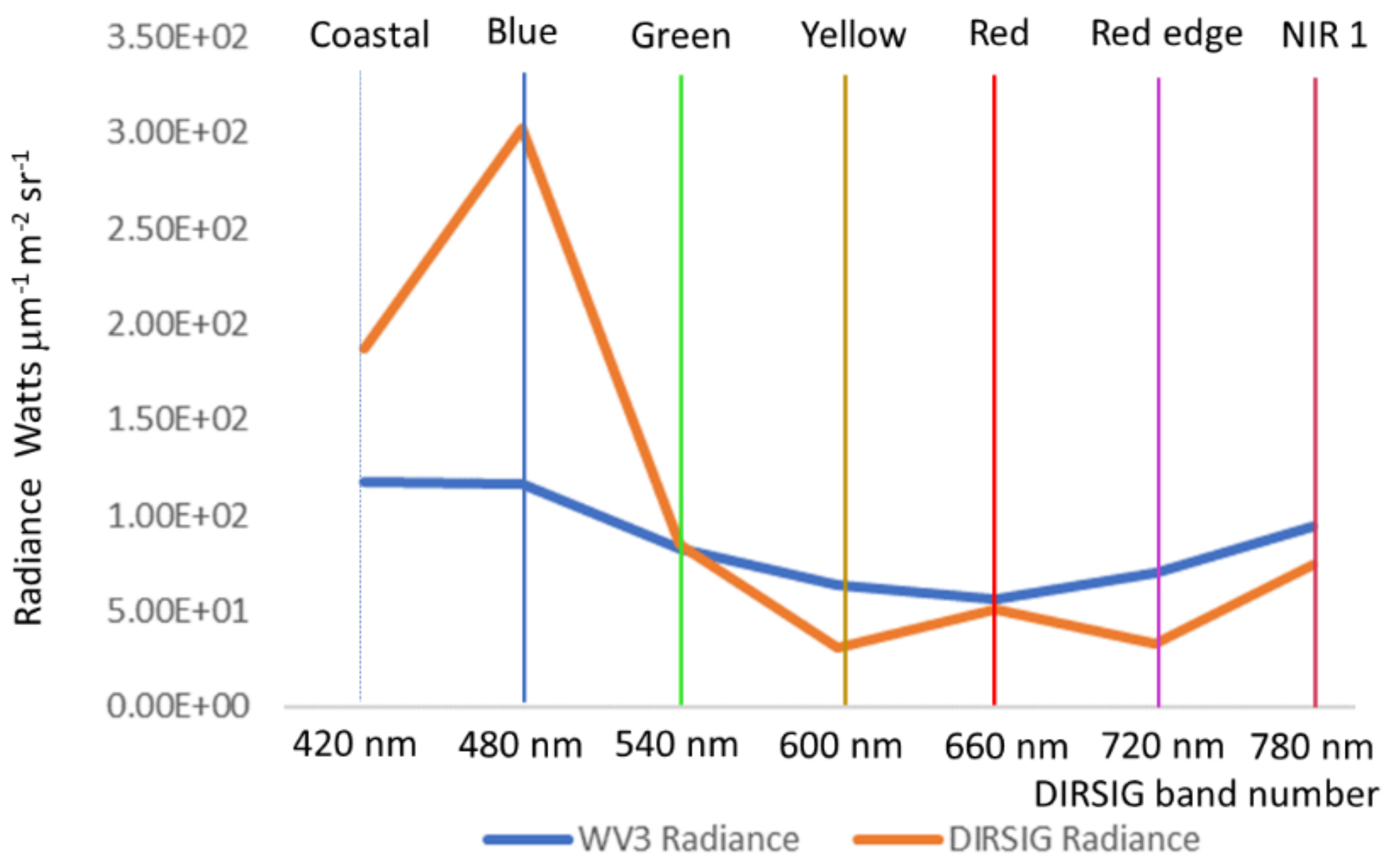
3.2. Comparison of Image Collection Simulation and Satellite Ground Truth
- Run the LES models using the forcing data taking into account the SGP site observations during the period of the ground truth experiment.
- Align the 3D atmosphere with the scene as projected onto a 2D ground plane.
- Integrate the cloud water along parallel lines of sight extending from each ground pixel to the satellite’s position for each day.
- These integrated lines of sight form a cloud mask (Figure 5), and the cloud coverage percentage is the percent of pixels for which clouds obscure the line of sight.
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Dobbs, B. The Incorporation of Atmospheric Variability into DIRSIG. Master’s Thesis, Rochester Institute of Technology, Rochester, NY, NY, USA, 2006. Available online: http://scholarworks.rit.edu/theses/3011 (accessed on 2 July 2020).
- Salvaggio, C. Multispectral Synthetic Scene Generation using Atmospheric Propagation and Thermodynamic Models. Ph.D. Thesis, State University of New York, New York, NY, USA, 1994. [Google Scholar]
- Ientilucci, E. Synthetic simulation and modeling of image intensified CCDs (IICCD). Master’s Thesis, Rochester Institute of Technology, Rochester, NY, USA, 1996. Available online: https://scholarworks.rit.edu/theses/3004 (accessed on 2 July 2020).
- Scanlon, N. Comparative Performance Analysis of Texture Characterization Models in DIRSIG. Master’s Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2003. Available online: https://scholarworks.rit.edu/theses/7067 (accessed on 2 July 2020).
- Young, S.R.; Steward, B.J.; Gross, K.C. Development and validation of the AFIT scene and sensor emulator for testing (ASSET). Proc. SPIE 2017, 10178, 101780A. [Google Scholar] [CrossRef]
- Walli, K.C. Relating Multimodal Imagery Data in 3D. Ph.D. Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2010. Available online: https://scholarworks.rit.edu/theses/3007 (accessed on 2 July 2020).
- Richtsmeier, S.; Sundberg, R.; Berk, A.; Adler-Golden, S.; Haren, R. Full Spectrum Scene Simulation. Def. Secur. 2004, 5425, 530–537. [Google Scholar] [CrossRef]
- Richtsmeier, S.C.; Lynch, D.K.; Dearborn, D.S.P. Antitwilight II: Monte Carlo simulations. Appl. Opt. 2017, 56, G169–G178. [Google Scholar] [CrossRef] [PubMed]
- Richtsmeier, S.; Sundberg, R. Recent advances in the simulation of partly cloudy scenes. Remote Sens. 2010, 7827, 78270S. [Google Scholar] [CrossRef]
- Richtsmeier, S.; Sundberg, R.; Haren, R.; Clark, F.O. Fast Monte Carlo full spectrum scene simulation. Def. Secur. Symp. 2006, 6233, 62331. [Google Scholar] [CrossRef]
- Endo, S.; Fridlind, A.; Lin, W.; Vogelmann, A.; Toto, T.; Ackerman, A.; McFarquhar, G.M.; Jackson, R.C.; Jonsson, H.H.; Liu, Y. RACORO continental boundary layer cloud investigations: 2. Large-eddy simulations of cumulus clouds and evaluation with in situ and ground-based observations. J. Geophys. Res. Atmos. 2015, 120, 5993–6014. [Google Scholar] [CrossRef] [Green Version]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; Bosch, J.V.D. Modtran6: A major upgrade of the Modtran radiative transfer code. SPIE Def. Secur. 2014, 9088. [Google Scholar] [CrossRef]
- Bierwirth, V. Visualizing Airborne and Satellite Imagery. NASA USRP Internship Report 2011. Available online: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20110012861.pdf (accessed on 2 July 2020).
- Fraedrich, K.; Blender, R. Fraedrich and Blender Reply. Phys. Rev. Lett. 2004, 92. [Google Scholar] [CrossRef]
- Han, W.; Yang, Z.; Di, L.; Yue, P. A geospatial Web Service Approach for Creating on-Demand Cropland Data Layer Thematic Maps. Trans. ASABE 2014, 57, 239–247. [Google Scholar]
- Gibbs, T.J. NEFDS contamination model parameter estimation of powder contaminated surfaces. Proc. SPIE 2016, 9840, 98400L. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical Note, NCAR/TN-475+STR; National Center for Atmospheric Research, University Corporation for Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar] [CrossRef]
- Thompson, G.; Field, P.R.; Rasmussen, R.M.; Hall, W.D. Explicit Forecasts of Winter Precipitation Using an Improved Bulk Microphysics Scheme. Part II: Implementation of a New Snow Parameterization. Mon. Weather. Rev. 2008, 136, 5095–5115. [Google Scholar] [CrossRef]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Space Phys. 2008, 113, 13103. [Google Scholar] [CrossRef]
- Deardorff, J.W. Stratocumulus-capped mixed layers derived from a three-dimensional model. Bound.-Layer Meteorol. 1980, 18, 495–527. [Google Scholar] [CrossRef]
- Fu, Q.; Liou, K.N. On the Correlatedk-Distribution Method for Radiative Transfer in Nonhomogeneous Atmospheres. J. Atmos. Sci. 1992, 49, 2139–2156. [Google Scholar] [CrossRef] [Green Version]
- Lacis, A.A.; Oinas, V. A description of the correlatedkdistribution method for modeling nongray gaseous absorption, thermal emission, and multiple scattering in vertically inhomogeneous atmospheres. J. Geophys. Res. Space Phys. 1991, 96, 9027. [Google Scholar] [CrossRef] [Green Version]
- Bae, S.Y.; Hong, S.-Y.; Lim, K.-S.S. Coupling WRF Double-Moment 6-Class Microphysics Schemes to RRTMG Radiation Scheme in Weather Research Forecasting Model. Adv. Meteorol. 2016, 2016, 5070154. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Y.; Zhu, K. Improved Length Scales for Turbulence Kinetic Energy–Based Planetary Boundary Layer Scheme for the Convective Atmospheric Boundary Layer. J. Atmos. Sci. 2020, 77, 2605–2626. [Google Scholar] [CrossRef]
- New, D.A. Are 1.5-order TKE-based eddy diffusivity closures a reasonable representation of physical processes underlying turbulent transport in convective and cloudy boundary layers? In Proceedings of the AGU Fall Meeting, Washington, DC, USA, 12–14 December 2018; p. A54B-08. [Google Scholar]
- Wikipedia Contributors. Turbulence Kinetic Energy. In Wikipedia, The Free Encyclopedia. Available online: https://en.wikipedia.org/w/index.php?title=Turbulence_kinetic_energy&oldid=965277340 (accessed on 20 September 2020).
- Xie, S.; Cederwall, R.T.; Zhang, M. Developing long-term single-column model/cloud system–resolving model forcing data using numerical weather prediction products constrained by surface and top of the atmosphere observations. J. Geophys. Res. Space Phys. 2004, 109, 01104. [Google Scholar] [CrossRef]
- Johnson, K.; Giangrande, S.; Toto, T. Atmospheric Radiation Measurement (ARM) User Facility. Updated HourlyActive Remote Sensing of CLouds (ARSCL) product using Ka-band ARM Zenith Radars (ARSCLKAZRBND1KOLLIAS), 21–28 May 2016, 36°36′18.0″ N, 97°29′6.0″ W: Southern Great Plains Central Facility (C1)Eastern North Atlantic (ENA) ARM/SGPARM Data Center. 1996. Available online: https://adc.arm.gov/discovery/#/results/instrument_code::arsclkazrbnd1kollias (accessed on 8 January 2019).
- Morrison, H.; Thompson, G.; Tatarskii, V. Impact of Cloud Microphysics on the Development of Trailing Stratiform Precipitation in a Simulated Squall Line: Comparison of One- and Two-Moment Schemes. Mon. Weather. Rev. 2009, 137, 991–1007. [Google Scholar] [CrossRef] [Green Version]
- Kokhanovsky, A. Optical properties of terrestrial clouds. Earth-Sci. Rev. 2004, 64, 189–241. [Google Scholar] [CrossRef]
- Xiang, X.; Wang, Z.; Mo, Z.; Chen, G.; Pham, K.; Blasch, E. Wind field estimation through autonomous quadcopter avionics. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–6. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date of Collection | Time of Collection (GMT) | Azimuth Angle (Degrees, Target to Sensor) | Elevation Angle (Degrees, Ground Tangent to Sensor) |
|---|---|---|---|
| 21 May 2016 | 174711 | 277.3 | 70.5 |
| 22 May 2016 | 180325 | 243.4 | 35.9 |
| 26 May 2016 | 172655 | 102.5 | 65.8 |
| 27 May 2016 | 174223 | 221.9 | 73.0 |
| 28 May 2016 | 175739 | 258.2 | 49.6 |
| Date of Collection | WorldView-3 Cloud Coverage | DIRSIG Cloud Coverage |
|---|---|---|
| 21 May 2016 | 84% | 99% |
| 22 May 2016 | 15% | 30% |
| 26 May 2016 | 100% | 0% |
| 27 May 2016 | 51% | 28% |
| 28 May 2016 | 0% | 1% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalukin, A.; Endo, S.; Crook, R.; Mahajan, M.; Fennimore, R.; Cialella, A.; Gregory, L.; Yoo, S.; Xu, W.; Cisek, D. Image Collection Simulation Using High-Resolution Atmospheric Modeling. Remote Sens. 2020, 12, 3214. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12193214
Kalukin A, Endo S, Crook R, Mahajan M, Fennimore R, Cialella A, Gregory L, Yoo S, Xu W, Cisek D. Image Collection Simulation Using High-Resolution Atmospheric Modeling. Remote Sensing. 2020; 12(19):3214. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12193214
Chicago/Turabian StyleKalukin, Andrew, Satoshi Endo, Russell Crook, Manoj Mahajan, Robert Fennimore, Alice Cialella, Laurie Gregory, Shinjae Yoo, Wei Xu, and Daniel Cisek. 2020. "Image Collection Simulation Using High-Resolution Atmospheric Modeling" Remote Sensing 12, no. 19: 3214. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12193214