1. Introduction
Different weather and climate phenomena, such as air pollution episodes of smog, severe precipitation, hurricanes, and heat waves, can affect the daily life of human beings, which may cause loss and/or harm to their property. These phenomena are directly or indirectly related to the atmospheric boundary layer (ABL), being the lowest layer of the troposphere directly influenced by the Earth’s surface and reacting quickly (within less than an hour) to surface forcing, such as frictional drag, heat transfer, terrain-produced air flows, evaporation, and transpiration [
1,
2,
3]. On the other hand, there are also global-scale phenomena that can affect the boundary layer. The El Niño Southern Oscillation (ENSO; [
4]) is known to accumulate heat in the atmosphere, and thus generates high temperatures [
5], affecting indirectly surface conditions even at a global scale [
6,
7]. The El Niño-related increase of temperatures can cause heat waves [
8], and thus affect the variability of the atmospheric boundary layer (the opposite for La Niña) [
9].
The atmospheric boundary layer height (ABLH) is one of the most vital parameters, playing a crucial role in boundary layer processes. The dispersion of anthropogenic pollutants, resulting concentrations, and the direction, altitude, and distance of transported pollutants can interplay with and be influenced by the boundary layer structure and diurnal evolution [
10,
11]. Thus, ABLH is one of the important parameters in studies related to air pollution and pollutant emissions [
12]. The boundary layer characteristics and its dynamics are related to adverse ambient conditions, and therefore their knowledge is helpful to model and predict mechanisms that matter in weather forecasting and climate change studies [
13]. The efficacy of the climate forcing processes is determined by the effective heat capacity of the atmosphere, which for a cold and dry climate is defined by the depth of the atmospheric boundary layer [
14,
15]. Therefore, studies of monthly, seasonal, and annual variability of ABLH are of interest for climate assessments. For the forecast of daily weather, as well as the impact of human activity on future climates, the boundary layer must be diagnosed. However, the processes governing the boundary layer evolution are still poorly resolved and/or often not represented in the current forecast models. Especially, continuous observations of changes in the ABLH with high spatial and temporal resolution are desirable to support weather and air quality prediction [
16].
Various techniques designed to derive ABLH from various instruments have been compared [
17,
18]. Rawinsondes onboard meteorological balloons were first employed to estimate ABLHs based on proxies for the mixing process of temperature inversion, relative humidity change, and wind speed and direction variation, parameters considered to be the most reliable reference by many previous studies [
19,
20,
21]. However, the rawinsondes launches (although usually set for regular observations) are relatively sparse. Moreover, a lack of temporal profiling continuity accompanies the limited vertical resolution, which is influenced by the rawinsonde balloons’ size, as well as the wind speed and direction [
21]. The ABLH can also be estimated by a wide range of remote sensing techniques, such as sound and radio detection and ranging techniques (sodar/radar), a radio acoustic sounding system (RASS), as well as microwave radiometers or wind profilers [
22,
23,
24]. Each of these approaches has its limitations regarding the measurement range and accuracy, spatial and temporal resolution, and weather conditions (clouds, fog, and precipitation). The ABLH measurement range and accuracy issues were solved to a large extent with the development of the light detection and ranging technology, e.g., by using next-generation high-power lidars [
25,
26,
27] or low-power lidars and ceilometers [
28,
29,
30,
31]. The latter are recognized worldwide as efficient and affordable ground-based instruments for profiling of the atmosphere [
32]. A vast number of ceilometers have been deployed in Europe to offer services to airports, meteorological agencies, and research institutions. Many of them operate within the E-PROFILE network (
https://e-profile.eu, last access: 11 December 2019) of automatic lidars and ceilometers (ALCs) and radar wind profilers (RWPs) in the framework of the Network of European Meteorological Services EUMETNET (
https://www.eumetnet.eu, last access: 11 December 2019). The ceilometers are primarily used for cloud and boundary layer height observations [
33,
34]. The quick-looks of these ceilometer data are accessible via the German Weather Service (DWD) website (
https://www.dwd.de/ceilomap, last access: 11 December 2019).
The determination of ABLH from ceilometer and lidar is based on using the elastic backscatter signals, whereby the ABLH is derived by relying on a higher aerosol load within the boundary layer than in the free troposphere. Several algorithms based on the aerosol load difference have emerged, to name just a few: The first or second derivative methods [
35,
36], logarithm gradient of the backscatter signal method [
22,
29,
37], backscatter threshold determination [
29,
38], temporal analysis of the return signal of the standard deviation or variance [
39], idealized backscatter fitting [
40], and wavelet covariance transform [
25,
27,
41]. In some approaches, a combination of those is applied [
12,
42,
43,
44,
45]. In the STRucture of ATmosphere STRAT algorithm, a combination of the wavelet transform and the range-corrected signal ratio thresholding is used to identify particle regions in lidar profiles. Then, the output of the molecular layer module and the particle layer module is used to help to distinguish the low-altitude clouds from the boundary layer below them [
42]. A COBOLT method was compared with the results from three versions of the proprietary software BL-VIEW of the Vaisala CL51 ceilometer designed to retrieve ABLH. Then, the main advantage of the COBOLT is the continuous detection of the MLH with a temporal resolution of 10 min and a lower number of cases when the residual layer is misinterpreted as the mixing layer [
12]. The PathfinderTURB algorithm that was developed for the real-time detection of ABLH from CHM15k ceilometer signals uses combined gradient- and variance-based methods to achieve better layer attribution considering the temporal variability of aerosol distribution [
45]. For all of the mentioned methods, the basis mainly relies on two principles: The gradient that is related to the signal intensity change, due to the variable vertical distribution of aerosols, and the variance that tracks fluctuations in the temporal distribution of aerosols [
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46,
47,
48,
49,
50]. All approaches have benefits and limitations, which were discussed recently in an extensive review paper on the ABLH retrieval techniques; still, no completely robust and reliable method has been established [
18].
Most of the studies reported in the literature focus on ABLH retrieval during the daytime and for fair-weather conditions [
24,
28,
34,
37,
38,
39,
40] while retrievals during complex weather situations, as well as during the sunrise/sunset and at nighttime, have been performed less often [
27,
29,
31,
46]. The most complex boundary layer and aerosol conditions often form at night, which is regarded as an important part of the diurnal changes within the ABL, and thus the nocturnal boundary layer should not be excluded from the ABLH statistical analysis. Moreover, research studies based on continuous long-term monitoring of the ABLH are seldom available [
25,
29,
44], particularly datasets acquired for longer than 5 years, and high temporal and spatial resolution retrievals are rare [
30]. In general, the knowledge of the long-term daytime and nighttime boundary layer variability is still rather limited [
51]. Added to this, the long-term seasonal and annual statistics at particular places of interest are seldom in existing studies [
29,
44], especially their combination with other parameters related to the air quality or the optical properties of the atmosphere [
11,
12,
16,
52]. Additionally, boundary layer clouds, being a part of ABL, play an important role in the ABL variability [
53,
54]. However, they often tend to be screened [
25,
37,
55], resulting in the clear-sky bias of the retrieval.
For the work reported within this paper, a combination of lidar and ceilometer observations in Warsaw were analyzed in terms of a unique sample, allowing derivation of the diurnal, seasonal, and annual cycles of ABLH based on 1841 daily evolution measurements. Firstly, through the exploration of these data, the analysis of a statistically significant probe of the ABLHs allowed for an assessment of the performance of the PollyXT lidar and the CHM15k ceilometer. Secondly, the height, structure, and evolution of the Warsaw ABLH for a decade of remote observations obtained by combining the data of both instruments are presented. Also, the characteristics of ABLH in Warsaw under clear-sky and cloudy conditions are discussed. This work contributes to a better understanding of the ABLH evolution at an urban continental site in the central Europe region and provides a set of important parameters and references that can be potentially used for improvements of weather prediction and climate models.
The paper is organized as follows. In
Section 2, the remote sensing instruments are described.
Section 3 details the methodology for calculating ABLHs from lidar, ceilometer, and rawinsonde measurements. In
Section 4, the ABLHs estimated from 4 months of simultaneous lidar and ceilometer data using different retrieval methods were inter-compared. The most suitable method for ABLH retrieval for both sensors was found by comparing the results with the ABLH derived from rawinsondes. In
Section 5, the scaling threshold-based method is proposed to decrease the bias of the ABLHs derived with lidar and ceilometer, therefore allowing both datasets to be homogenized. In
Section 6, the monthly, seasonal, and yearly variability of the ABLH over Warsaw, including the frequency distribution of altitude occurrence during daytime and nighttime for the entire observational period, are reported. Finally, the paper is concluded in
Section 7.
2. Instrumentation
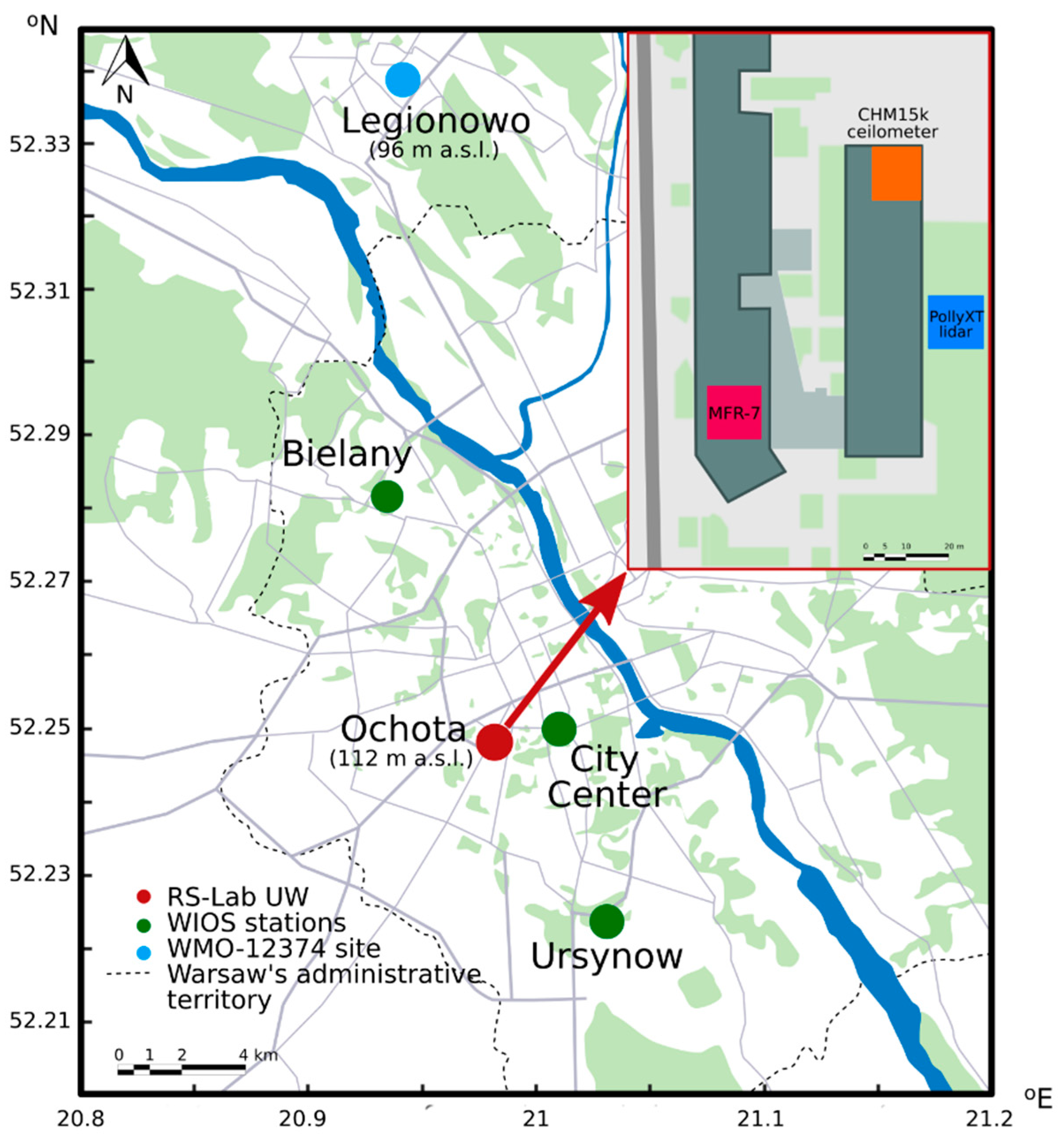
Within this study, two ground-based active remote sensors were utilized: The custom-designed ceilometer (CHM15k model, Lufft/JenOptik, Germany) and the multiwavelength-Raman-polarization lidar PollyXT (collaborative in-house development). Both instruments were operated at the Remote Sensing Laboratory (RS-Lab) of the Institute of Geophysics at the Faculty of Physics of the University of Warsaw, located in Warsaw city center (52.2109°N, 20.9826°E, 112 m a.s.l.). The RS-Lab is equipped with several instruments that were used in this study as auxiliary (locations indicated in
Figure 1) or not at all (
https://www.igf.fuw.edu.pl/en/instruments/, last access: 11 December 2019). The RS-Lab regularly provides data to several networks: The Polish Aerosol Research Network (PolandAOD-NET,
http://www.polandaod.pl, last access: 11 December 2019), the EARLINET (
https://www.earlinet.org, last access: 11 December 2019), and the worldwide lidar network Polly-NET (
http://polly.rsd.tropos.de, last access: 11 December 2019).
The CHM15k ceilometer was continuously operated in Warsaw from 1 January 2008 to 31 October 2013. It was installed on the roof-platform of the RS-Lab (21 m a.g.l.). The data was acquired with a temporal resolution of 30 s and a spatial resolution of 15 m, with the maximum signal range of 15.36 km (corresponding to 1024 range-bins). The ceilometer comprises a diode-pumped Nd:YAG solid-state laser, which emits low-energy laser pulses (8 µJ), at a high frequency (5–7 kHz), at a wavelength of 1064 nm. The optical design is based on a refracting telescope; the lens has a 100 mm diameter. The lowermost level of the overlap between the emitted laser beam and the receiver lens is at approximately 180 m and the full overlap is completed at approximately 800 m. The CHM15k instrument at the RS-Lab has a custom field of view (FOV, i.e., 0.9 mrad), which results in an optimal overlap and signal-to-noise ratio (SNR) being achieved [
29]. For comparison, the standard CHM15k has a narrower FOV (but issues with high overlap) and the CHM15kx has a wider FOV (but issues with background radiation), as discussed in detail by [
32]. The automatic manufacturer overlap correction is applied to the ceilometer signals. The standard CHM15k can suffer from the fact that the amplitude of the overlap correction is temperature dependent, this being larger for higher temperatures [
56]. The study of the overlap function and the instrumental constant dependence on the internal temperature changes was also done for the RS-Lab CHM15k. From 30 April to 2 May 2012, the ceilometer was installed at the St. Jacob the Apostle Parish located in the small, sparsely populated and spacious rural town of Głowno (51.9645°N, 19.7249°E) in the Central Polish Lowlands. Unique horizontal measurements were taken over the Mrożyczka Reservoir, and thus calculations were done within the range where no local traffic influence was possible. The results showed that for the RS-Lab version of the CHM15k, the temperature effects are negligible. The overlap function was determined from several horizontal measurements to assess the signal quality at ranges near the ceilometer. The closest range-bin for which the signal variability was significant (i.e., >3σ at daytime and >1σ at night) was at the range-bin 12, translating to 180 m. Since November 2013, the ceilometer measurements have been conducted at the SolarAOT Observatory in Strzyzow within the PolandAOD-NET activities. Further details on this particular version of the custom-designed ceilometer are described in [
29] and the differences of various versions of the CHM15k and CHM15kx ceilometers are discussed in [
32].
The PollyXT lidar was built in a scientific collaboration of the Institute of Geophysics at the Faculty of Physics of the University of Warsaw (IGFUW, Warsaw, Poland) and the Leibniz Institute of Tropospheric Research (TROPOS, Leipzig, Germany). It was installed at the RS-Lab in Warsaw in June 2013. After an extensive test phase, the lidar started operation on 1 July 2013 and has performed quasi-continuous observations ever since. The lidar emits high-energy laser pulses of 180 mJ at 1064 nm, 110 mJ at 532 nm, and 60 mJ at 355 nm, with a repetition rate of 20 Hz. The initial laser beam is expanded to a 45 mm diameter, providing a low beam divergence of 0.2 mrad. The signals are received by two reflecting telescopes: The narrow field of view (1 mrad) large-sized telescope (300 mm diameter) and the wide field of view (2.5 mrad) small-sized telescope (50 mm diameter). The later was installed in April 2016, with the aim of improving the lidar detection range at altitudes close to the ground (<1 km). The measurements are performed at 8-channels, using the large telescope, and at 4-channels, using the small telescope. The 8-channel detection unit (so-called 2α + 3β + 2δ + WV) enables the determination of the extinction coefficient profiles at 532 and 355 nm; the backscatter coefficient at 1064, 532, and 355 nm; the depolarization ratio at 532 and 355 nm; and the water vapor mixing ratio. The 4-channel detection unit (so-called 2α + 2β) is designated for obtaining the extinction and backscatter coefficient profiles at 532 and 355 nm. The signals are recorded up to 48 km (with a pretrigger length of 250 range-bins). The data of all channels is obtained with a standard 7.5 m vertical resolution in temporal steps of 30 s. The overlapping range of the laser beam and the large and the small telescopes is completed at roughly 400 and 120 m, respectively. No overlap correction was applied to the lidar data in this paper. The overlap function of lidar is monitored as the ratio of the signal collected with the small telescope to the signal collected at the large telescope, and thus for two elastic (355 and 532 nm) and two Raman (387 and 607 nm) channels. Additionally, we monitored the stability of the overlap with a camera, the laser pulse energy with a power meter, and the temperature inside the lidar cabinet. The inspection of the monitored parameters shows that typically, the temperature-dependent differences in the overlap are very low (<15 m) and the stability of the lidar signal is high (>98%), which is due to the use of an insulated cabinet equipped with an efficient heating–cooling system. More technical information on PollyXT-type lidars can be found in [
57]. The aerosol optical properties retrieval schemes are introduced in [
11,
58,
59]. The aerosol microphysical properties’ retrieval is described in [
60] and the water vapor derivation methodology in [
61].
Concerning the overlap region of the two sensors, the lowest possible height of ABLH that can be unambiguously detected with the ceilometer and lidar (large telescope) is at 195 m a.g.l. Note that the lidar range resolution is reduced to merge the ceilometer range resolution of 15 m, whereby the lidar initial range-bins 4th and 5th correspond to the ceilometer 1st range-bin.
Note that for both instruments described here, the signal-to-noise ratio depends on the solar background illumination and the presence of molecules and particles suspended in the atmosphere, whereby it decreases rapidly when the optical depth of the atmosphere declines. The SNR was calculated using the approach described in [
62].
The auxiliary instrumentation of the RS-Lab that was used in this paper comprises the sensors installed at two roof platforms (
Figure 1), i.e., the weather transmitter WXT510 (Vaisala), the disdrometer OTT (Parsivel), the passive multi-filter rotating shadowband radiometer on a solar tracker MFR-7 (Yankee Environmental Systems), and the sun photometer CE318 (CIMEL Electronique); the latter has been operated since 1 January 2018.
5. Scaling Threshold-Based Method for Consistent Lidar and Ceilometer ABLH Retrieval
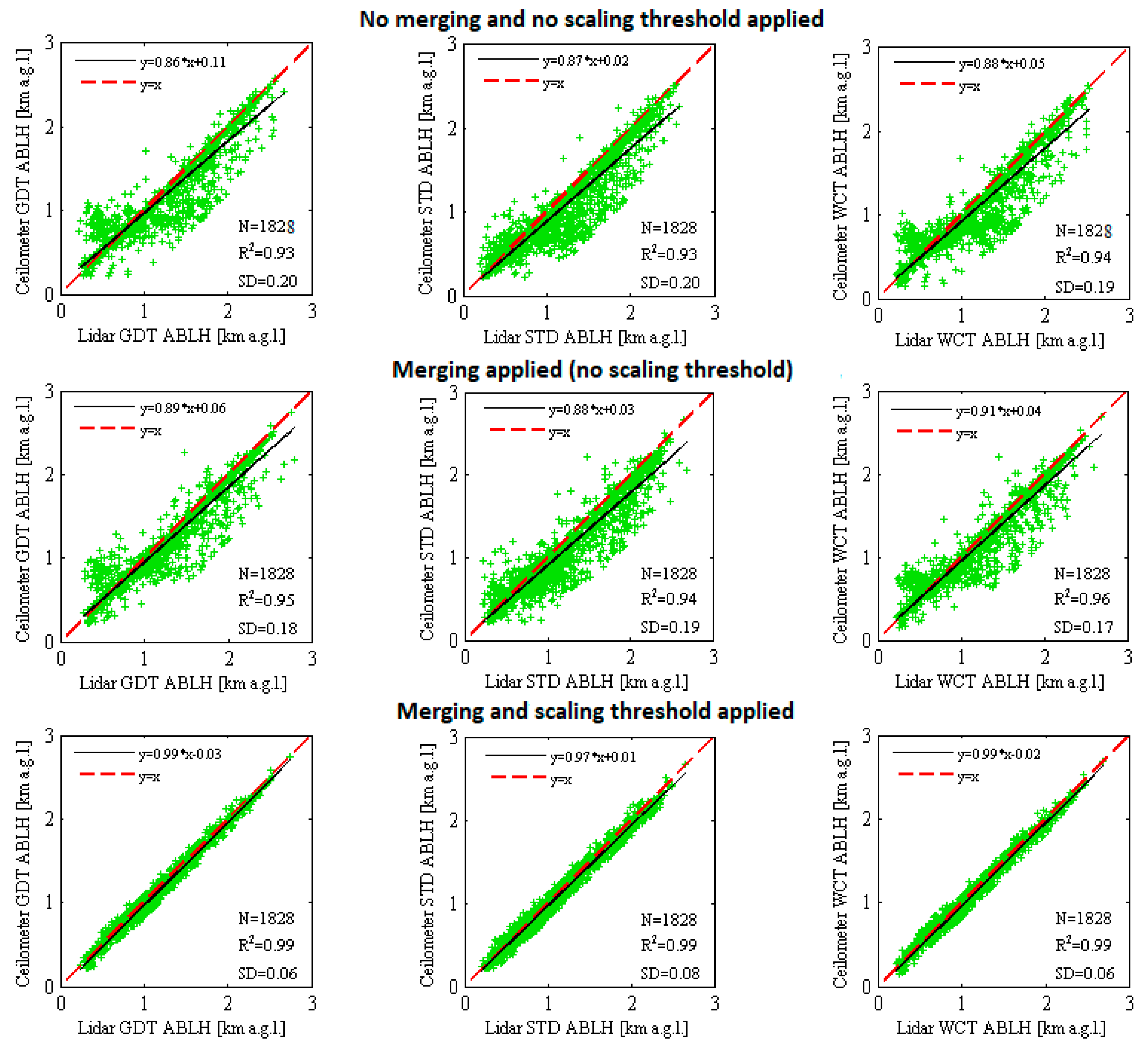
The direct comparison of the ABLHs derived from the collocated lidar and ceilometer measurements using the three methods (GDT, STD, and WCT) is shown in
Figure 5. From July to October 2013, the data sample of 1828 measurements (each data point represents the 10 min average) was compared. In
Figure 5, top subfigures, the lidar and ceilometer data are not merged (i.e., they were obtained for initial resolutions of 7.5 m for lidar and 15 m for ceilometer, and the difference in each instrument elevation height was not considered). The correlation coefficients obtained for each of the three methods are high (0.93 < R
2 < 0.94) with the standard deviation in a range that corresponds to the initial bias (300 m) of the lidar-ceilometer measurements (0.19 < SD < 0.2 km). Generally, below the altitude of 0.7 km, the lidar-derived ABLHs are slightly lower in comparison to the ceilometer-derived values while above the altitude of 1 km, the opposite tendency is observed (this is also evident in
Figure 4). In
Figure 5, middle subfigures, one can see that lidar-to-ceilometer signal re-binning and merging (as in
Section 3.1) slightly improved the data correlation (0.94 < R
2 < 0.96) and decreased the standard deviation (0.17–0.19 km), resulting in reduced bias (200 m).
In order to further reduce the bias in the lidar-ceilometer ABLH retrievals, the threshold-based scaling method was developed and applied to the merged data. In this paper, the choice to scale the lidar-to-ceilometer ABLHs was made for two reasons. Firstly, there are much more low-power ceilometers over Europe than complex high-power lidars, and therefore the ceilometers can be regarded as reference instruments for ABLH retrieval. Secondly, it was considered that the results of the comparisons of the lidar-rawindsonde and the ceilometer-rawindsonde ABLH values (discussed in
Section 4.1) showed more consistent results for the latter.
The working principle of the threshold-based scaling algorithm is given below.
Let us denote
SD as the standard deviation obtained for the direct comparison of the ceilometer-derived ABLH (denoted
CH) and the merged lidar-derived ABLH (denoted
LH) collected during the collocated side-by-side measurements. Then, the scaled
LHnew can be obtained as in Equations (1) and (2):
where
Y1 = (
LH − CH).
where
Y2 = (
CH − LH).
The scaling Equations (1) and (2) are not directly based on any physical process. Still, indirectly, they have a physical basis, which is exposed in the standard deviation of the initially derived ABLHs. Two instruments are available, each sensing the atmosphere with the identical principle but using a different technological solution for the light source and the detection system.
Hence, discrepancies can be expected in the derived ABLH, which are due to differences in the initial sensitivity to atmospheric aerosol and molecules sensed by the ceilometer and/or the lidar (due to the different signal intensities). Consequently, the proposed scaling method assumes that those differences are visible in the standard deviation. Note that this approach cannot be treated as the data correcting procedure but instead as the scaling approach to homogenize the datasets obtained by the two instruments. Also, this has nothing to do with any judgment of which instrument is better or worse.
In
Figure 6, bottom subfigures, the improvement of the comparison results due to an application of the proposed scaling scheme is depicted by lowering the bias significantly, i.e., to only 60 m for the GDT and WCT methods, and only slightly higher at 80 m for the STD method. The correlation coefficients are very high (0.99) for all the tested ABLH retrieval methods.
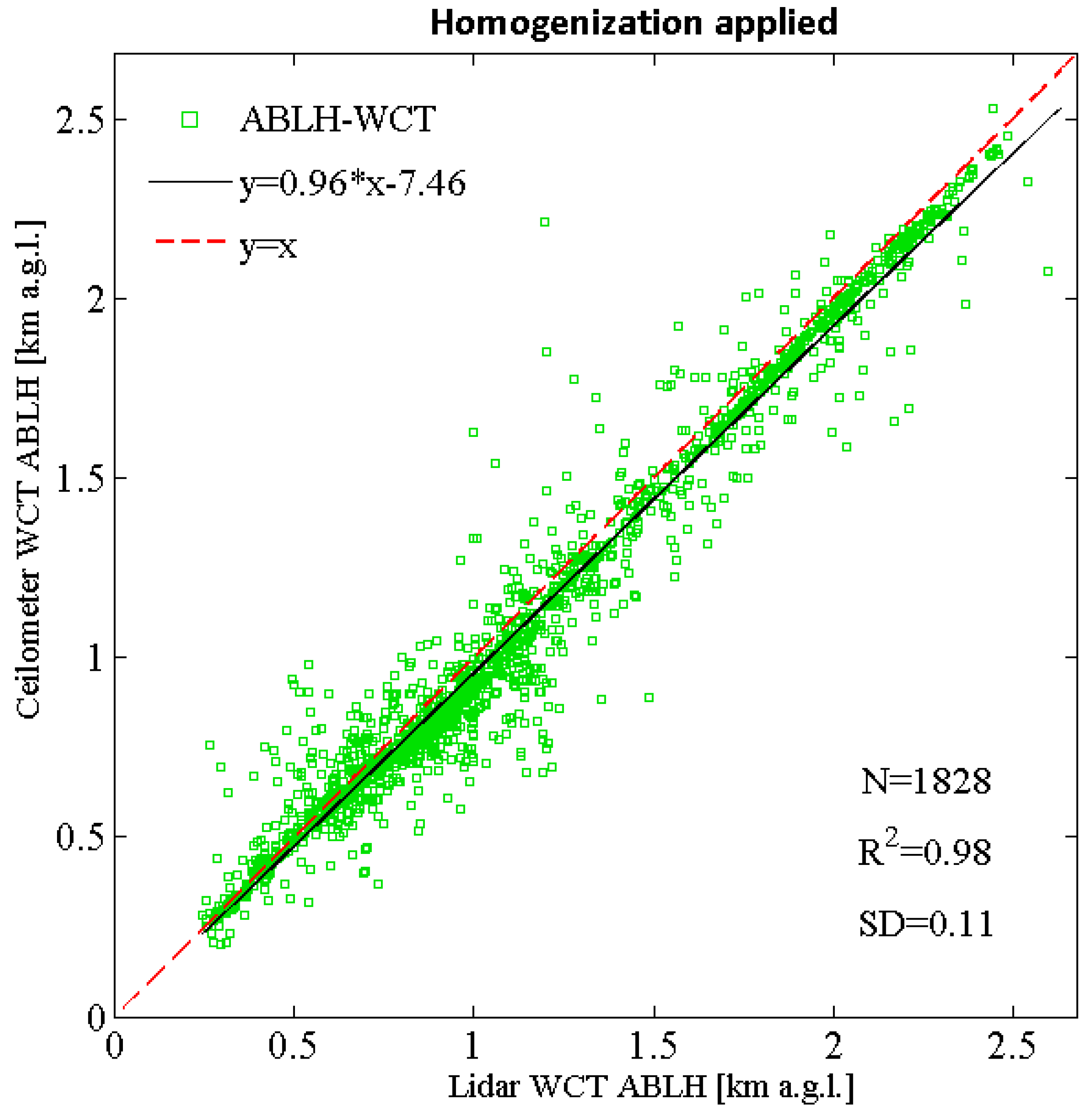
Note that the Equations (1) and (2) can be applied only for the days when the collocated lidar and ceilometer measurements are available. However, from 1 November 2013, the measurements in Warsaw were conducted only with the PollyXT lidar. When only lidar measurements are available, the calculation of the standard deviation of lidar-ceilometer ABLHs is not possible, and hence, the universal method is needed to solve this issue. As a solution, the standard deviation of the lidar-derived ABLH was examined to provide a possible indication on the inadequacies of the retrieval. The standard deviation of the lidar-derived ABLHs (denoted SD
L) was obtained within every 10 min average and used as an independent threshold. Then, the lidar-derived ABLH (denoted LH) was scaled to the new value (LH
new) to homogenize the datasets, as given in Equation (3):
In
Figure 6, the ceilometer-derived ABLHs are used to test the lidar-derived ABLHs obtained by applying the homogenization algorithm as in Equation (3). The resulting correlation coefficient of the two instruments is an R
2 of 0.98, and an SD of 0.11 km was obtained. Similarly, high numbers were also obtained for the clear-sky versus cloudy conditions and the daytime (well mixed) versus nighttime (stable) (not shown for brevity). This demonstrates that the proposed method is reliable and can provide coherent results for both datasets. Therefore, it was applied to all lidar-derived ABLHs from 1 November 2013 to 31 December 2018.
Overall, the correlation of ABLHs obtained from the lidar and ceilometer measurements (
Figure 4 and
Figure 5) are high (R
2 > 0.91, with SD < 0.22 km) for all performed comparison tests. Therefore, after applying the homogenization, a good continuity of the observations is expected during the whole period of interest (2008–2018). The WCT method applied on the merged signals for the scaled datasets (
Figure 5, bottom subfigures, and
Figure 6) was identified as the best option for conducting further analyses of the decadal datasets, combining the lidar and ceilometer observations in Warsaw.
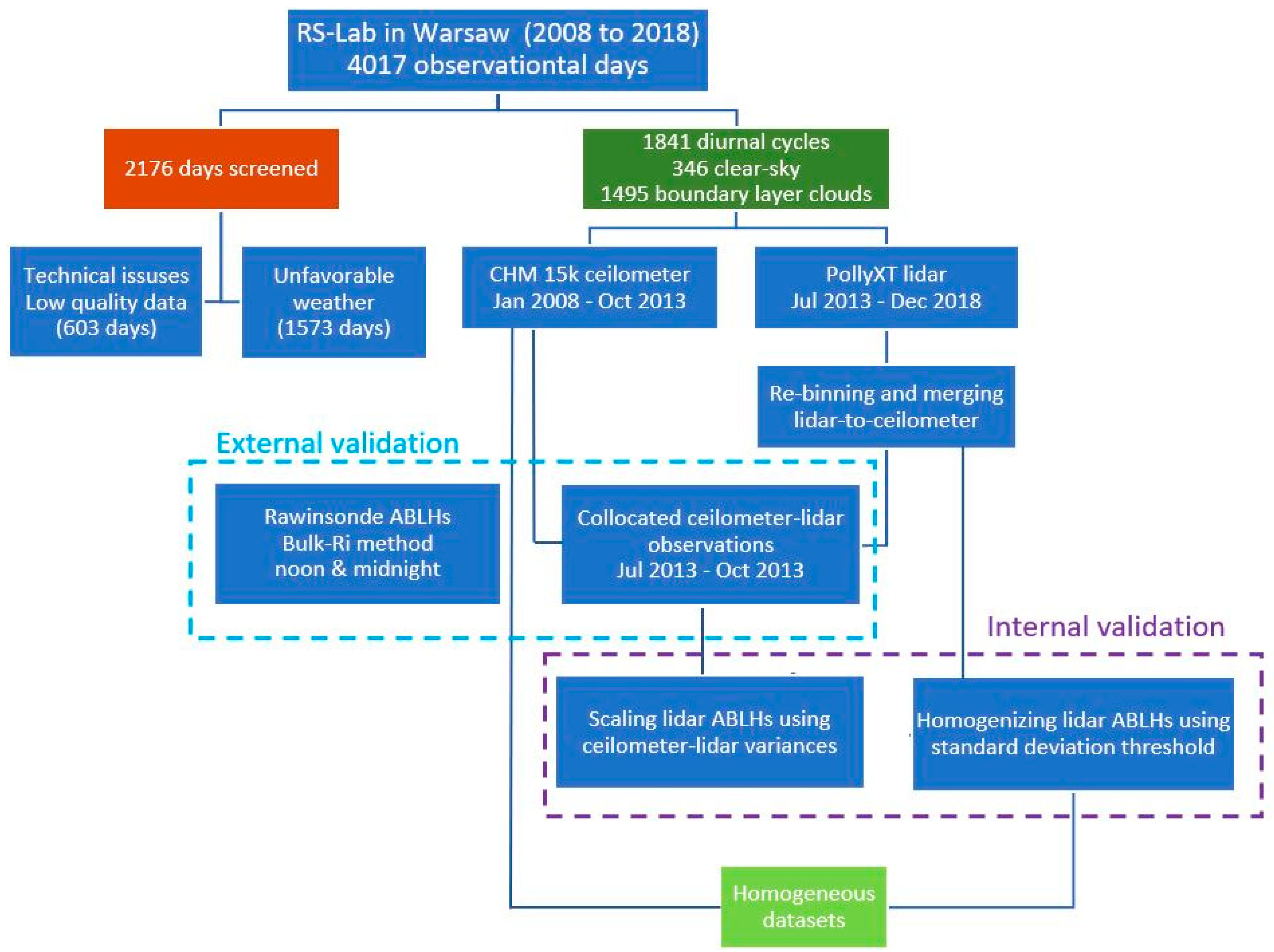
The homogenization algorithm workflow is given in
Figure 7.
6. Statistical Analyses of a Decade of ABLH Measurements in Warsaw
A decade of long-term observations of CHM15k ceilometer and PollyXT lidar performed in Warsaw from 2008 to 2018 were used for the statistical analyses. The ceilometer measurements from 1 January 2008 to 31 October 2013 and the lidar measurements from 1 November 2013 until 31 December 2018 were homogenized and combined.
A total number of 1841 daily evolution measurements were obtained, whereby the valid observation day was defined as providing data for at least 12 h on that day (with a minimum of 6 h per day and per night). The observation day was regarded as a clear sky if no cloud occurred within at least 12 h (except Cirrus > 8 km). The separation methodology for the clear-sky and the cloudy days is detailed in
Section 4.
For further analyses, the following are defined as providing representative values:
The diurnal cycle: More than 12 h/day of measurements, with a minimum of 6 h per day and per night;
The annual cycle: More than six monthly mean values per year; and
The monthly mean: At least 3 days, each with more than 12 h/day of measurements, with a minimum of 6 h per day and per night;
The seasonal mean: At least 10 days, each with more than 12 h/day of measurements, with a minimum of 6 h per day and per night, within the 3-month-long season in each year; and
The yearly mean: At least 3 days, each with more than 12 h/day of measurements, with a minimum of 6 h per day and per night, for at least 8 months in each year.
Within the subset of the 1841 daily evolution observations, the daytime/nighttime and the cloudy/clear-sky coverage do not significantly influence the data sample. There is no bias towards any of those conditions due to the well-defined subsample focused on capturing the diurnal cycle.
The number of valid observational days for each year under the analyses is listed in
Table 3, where next to the total number of observational days, a subset of 346 observational days regarded as being taken under clear-sky conditions is indicated. Note that a clear sky does not mean pollution-free conditions. For reference, in Warsaw, the PollyXT lidar-derived aerosol optical depth at 532 nm AOD
ABL(532) of 0.11 ± 0.06 was reported as a mean background value within the boundary layer, whereby the lowermost values as low as 0.03 were measured under extremely clean urban conditions after precipitation [
52]. In the case of the long-range transport over the site, the columnar measurements with the MFR-7 radiometer at 550 nm can easily increase by an order of magnitude or more (AOD
CL(550) even up to 0.7 reported by [
60]), with a mean AOD
CL(550) of 0.26 reported by [
76].
As for the monthly representativeness within the total number of days, the highest number of observations was achieved for June and July (>190 days, each) and the lowest in November (<90 days). However, for the clear-sky data subset, the highest number of observations were conducted in August (48 days) and the lowest in December and February (<15 days, each). As for the yearly representativeness for the total number of days, the highest number of observations was for the years 2011 and 2013 (circa 300 days, each) and the lowest for the years 2014 and 2015 (circa 50 days, each). Within the clear-sky data subset, the year 2018 had the highest number of observations (65 days). The clear-sky occurrence within the total sample was highest in the year 2015 (49%) and in the month of August (28%, whereby the majority of these measurements were taken in 2015).
The missing data comprise in total 2176 days (1 January 2008 to 31 December 2018).
Due to purely technical issues, 542 days of lidar data and 61 days of ceilometer data were missing. In October and November 2012, there was a ceilometer computer failure. From December 2013 until March 2014 and from September until November 2014, the lidar laser head failure inhibited observations. In the years 2015 and 2017, there were several breakdowns of the lidar laser cooling system. Additionally, in the years 2014 and 2015, a new research facility was built next to the lidar, disabling any observations during the tower crane stock operation.
The missing days are also attributed to unfavorable weather conditions, as affected by the ground precipitation and/or the fog/smog conditions (refer to
Section 4). Ceilometer measurements are performed continuously but ABLH cannot be derived in the aforementioned conditions. Consequently, there were 1270 valid days from 1 January 2008 to 31 October 2013. For precipitation of snow or rain, the continuous lidar measurements stop automatically and restart after the event passed, which resulted in 571 valid days (from 1 November 2013 to 31 December 2018).
The analyzed data sample contained all days listed in
Table 3, including the overcast weather days (here, boundary layer clouds <3 km) and the clear-sky days (here, cloudless or with Cirrus >8 km), i.e., not only the aerosol signatures but also the boundary layer clouds in the lidar and ceilometer signals were used as a marker to track the ABLHs.
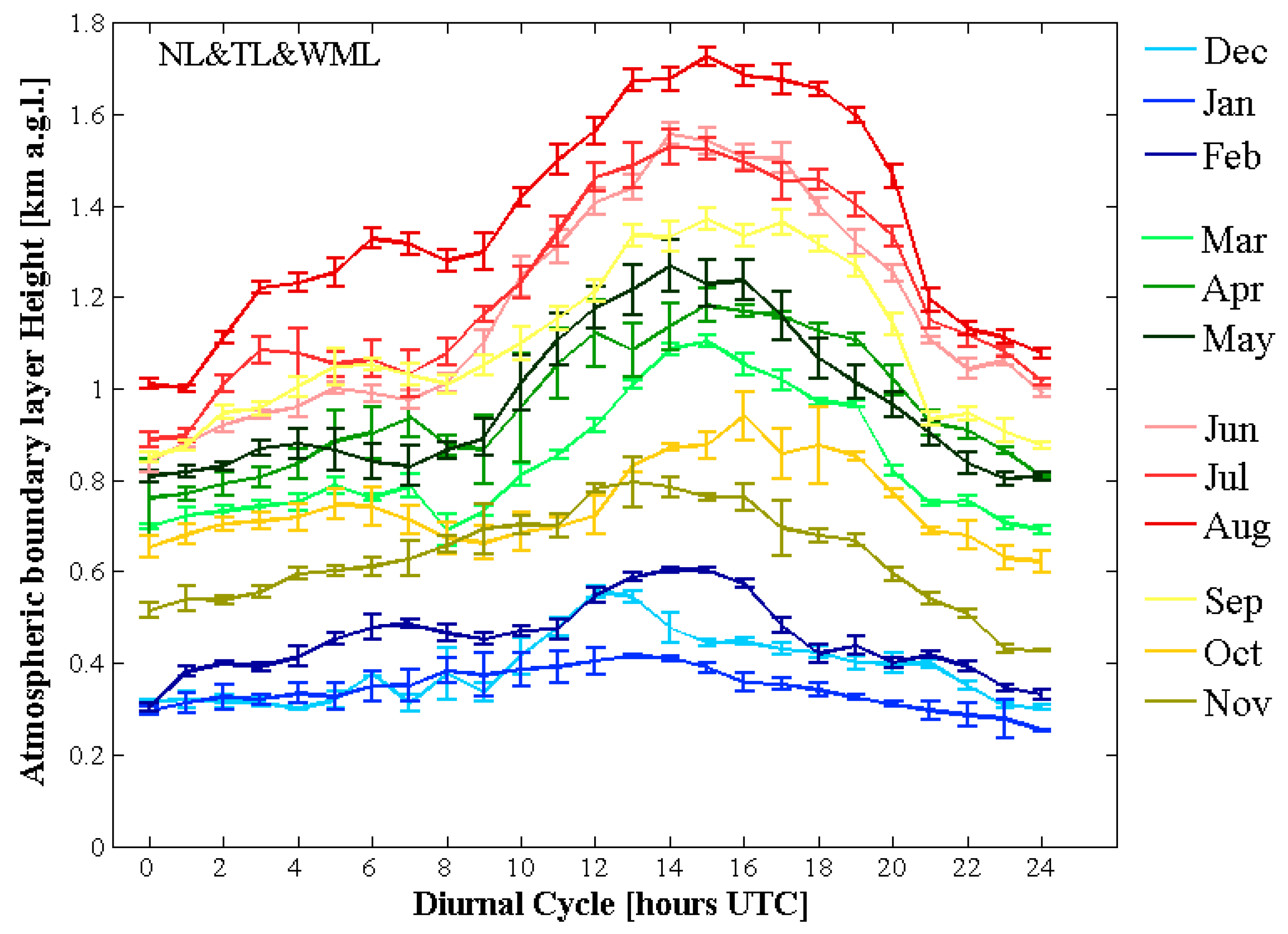
6.1. Monthly Variability of the Average Diurnal Cycles of the Boundary Layer Height
The monthly average diurnal cycles of ABLH were derived for a subset of the clear-sky diurnal cycle data listed in brackets in
Table 3. They were calculated separately for the ABLH values obtained as the NL, TL, and WML versus the RL, TL, and WML (definition in
Table 1) to assess the differences related to the nocturnal and the residual boundary layer. As expected, the diurnal cycles that included the nocturnal layer information, shown in
Figure 8, were more pronounced than the diurnal cycles including information on the residual layer (the latter not shown for brevity). The ABLH maximum values in each cycle for 12 months were mainly distributed from 12:00 until 15:00 UTC, except for the winter months. The significantly higher nocturnal boundary layer in August than December can be attributed to the solar position and zenith angle, which leads to an earlier sunrise and a late sunset in the summer months. Thus, it affects the solar radiation reaching the surface, and hence, the surface temperature, causing a higher boundary layer in summer than in winter. In Warsaw, nighttime in summer lasts about 7 h (or less) and in winter about 14 h (or more), so that in summer, one cannot expect a strong cooling effect at night. Therefore, the difference of 500 to 700 m in the ABLH derived at night in summer and winter is plausible.
The monthly average diurnal cycles indicated strong seasonal changes. The most spectacular was the abrupt change of the winter boundary layer cycle shape and height (
Figure 8, in blue), which maintained a very low diurnal variability in December, January, and February. A well-pronounced diurnal cycle of the following spring months is depicted (in green). This sharp winter-to-spring cycle change was related to a well-pronounced pre-spring season (discussed below).
The diurnal cycles obtained for spring and summer indicated a smooth and mild month-to-month transition to higher ABLH values, with an increase of the heights during both the day and nighttime. The diurnal cycle for August (
Figure 8, in red) was found to be the highest; it stands out from the others in terms of the ABLH values but not the shape. The August diurnal cycle remained practically unaffected by the uneven data sampling—the highest probe for August 2015 (48/19 cases). Excluding the August 2015 data from the diurnal cycle of August (not shown for brevity) revealed only a slightly flattened shape (30 to 90 m lower ABLH values between 12:00 and 20:00 UTC).
The autumn diurnal cycle of September (
Figure 8, in beige) resembled the summer cycles of June and July (
Figure 8, in pink and red), which indicates a prolongation of the summer season at the cost of autumn. The similarity of the September cycle to the summer cycles is naturally related to the meteorological conditions being more like those in summer. The prolongation of summer in Poland that is manifested in the derived diurnal mean cycles of 2008 to 2018 was reported in other studies (e.g., [
77]). The remaining autumn cycles (
Figure 8, in yellow) were significantly lower, not only from the September cycle, but generally from all spring and summer cycles. This indicates a somewhat smooth transition to the winter season. Still, the October and November diurnal cycles have distinctly different shapes from all winter cycles.
The much higher spring cycles than the winter cycles and the well-separated height in the autumn cycles from the winter cycles indicate a very short and well-defined winter season. The January cycle has a flat shape. Taking into account the equal representatives of the data for the hour of day (the majority of samples obtained for ceilometer observations in 2008 to 2013), this can be explained by the urban heat island effect.
The urban heat island (UHI) means that the temperature within the urban area is significantly warmer than in the surrounding rural areas [
76]. The effect is due to both human activities in the city (traffic, combustion, etc.) and the differences between the land surfaces in the city and the rural areas [
78]. At night, the absence of solar heating (no strong atmospheric convection) normally leads to the stable boundary layer [
1,
2,
3]. During UHI conditions, the inversion traps the urban air near the surface and keeps it warm from the urban surfaces. This results in warmer nighttime air temperatures that prevent a strong decrease of the urban boundary layer height after sunset [
79]. The mean yearly intensity of the UHI index (difference of the minimum daily temperature for the urban area to the value of the minimum daily temperature for the suburb area) reaches over 2 °C in the city center over Warsaw. The very center of the city is warmer in the night by 2.5 °C compared to the outskirts [
78]. The UHI is most effective and intensive in wintertime, at night or before dawn [
78]. The wintertime diurnal cycles may also be affected by biases due to an occurrence of the nocturnal layers below the detection range of the ceilometer or lidar (195 m), although this is expected to have a minor effect on the retrievals in comparison with the heat island effect.
In general, the diurnal cycles showed an increase during the transition from the spring months (0.7–1.2 km) to reach their highest values in the summer months (0.9–1.7 km). Thereafter, in autumn, a decline of the mean monthly ABLHs was observed (0.6–1.3 km). The lowest mean values (≤0.6 km) occurred, as expected, in the winter months. This is, in general, in agreement with the average ABLH summer and winter values of, respectively, 1.5 and 0.7 km reported previously for Warsaw [
29,
52].
According to the Koeppen–Geiger climate classification system (maps available at
http://koeppen-geiger.vu-wien.ac.at), the climate over Poland has changed. In 1951 to 1975, western Poland was under the Cfb climate (defined as warm temperate humid with warm summer) and eastern Poland was under the Dwd climate (defined as boreal extremely continental with dry winter). In the following decade, the Cfb climate was already over the whole of Poland [
80]. Traditionally, the climatic and astronomical seasons are not identically defined for Poland, as there are two additional pre-seasons regarded as being present in Poland’s climate: The pre-winter, with significant cooling in November, and the pre-spring, with significant warming at the turn of February and March [
77]. In the obtained monthly mean diurnal cycles, the pre-spring season was evident (exceptionally high March cycle;
Figure 8, in light green). The autumn diurnal cycle of November was not very low, as expected as representing the pre-winter season (
Figure 8, in dark yellow). The change of the climate seasonality of Poland [
80] is in accordance with the ABLH cycles resembling the very warm spring [
77], as well as the prolonged summer into the month of September.
6.2. Annual Variability of the Monthly and Seasonal Mean Boundary Layer Height
The monthly mean ABLH values with standard deviations were calculated from the 1841 daily evolution cycles obtained in all-weather conditions. Note that the obtained temporal variations may be affected by data availability (
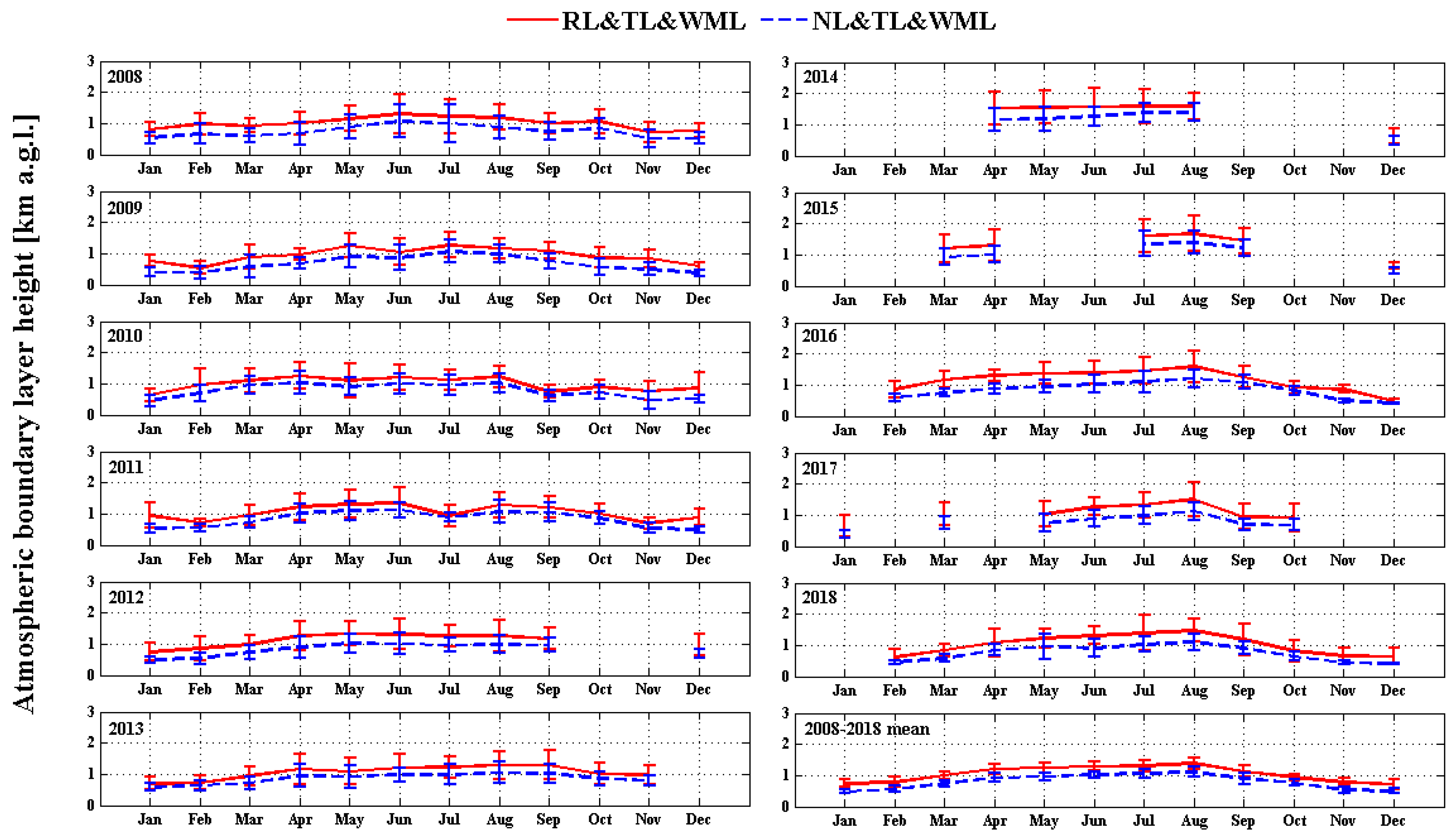
Table 3). The annual variability of the monthly mean ABLH values from 2008 to 2018 was plotted in
Figure 9, separated into the RL, TL, and WML average (in red) and the NL, TL, and WML average (in blue). Because the residual layers can be valuable for the interpretation of pollution concentrations observed within the ABL [
55,
59], such a separation can be useful for future studies. As expected, the heights of the NL, TL, and WML were lower, but the trend of both was similar. The monthly annual changes from 2008 to 2011 were observed for all months, whereas after 2011, for some months the mean values could not be obtained. In general, the monthly mean ABLHs showed a slight increase from the spring months (MAM) to the summer months (JJA), where the mean ABLH increased to its highest values, with the mean exceeding 1 km. The lowest mean ABLH values appeared mainly during the winter months (DJF), with mean values of less than 1 km for all years. For the autumn months (SON), a similarity with either the winter or spring months was captured. From 2008 to 2013, the fluctuations of ABLHs generally remain around 1 km. In 2014 and 2015, high monthly mean ABLHs (>1.5 km) were derived, which can be partly attributed to the most missing data in these two years (a total of about 50 days per year).
The year-to-year monthly mean ABLHs were the lowest for the winter of 2016 and 2018, and the highest for the springs and summers of 2014, 2015, and 2016. This should be at least partly attributed to the decadal activity of the ENSO, resulting in global atmospheric heating (El Niño) or cooling (La Niña). The monthly mean ABLHs are in accordance with the moderate-to-strong El Niño in 2014–2016 and the moderate La Niña in 2010–2012, both reported by the NOAA Oceanic Niño Index (available via
http://origin.cpc.ncep.noaa.gov/products/analysis_monitoring/ensostuff/ONI_v5.php, last access: 11 December 2019). The strong El Niño can result in highly increased temperatures and droughts in Europe [
81,
82]. At the same time, the resulting prolonged increase of the surface temperature due to droughts and heat waves can cause a higher boundary layer [
8,
9,
10,
11].
These effects can be seen on the scale of the annual cycle (
Figure 9). The extreme summer heat wave was observed over Europe during July 2015 and resembled exceptionally high values for the two following months [
82,
83,
84]. A European heat wave event was also reported for September 2016 [
11]. The surface air temperature monthly means with anomalies (relative to the monthly average calculated for the period 1981–2010) are provided from September 2015 until the present month by the ERA-Interim ECMWF Copernicus Climate Change Service (maps available via
https://climate.copernicus.eu/resources/data-analysis/average-surface-air-temperature-analysis, last access: 11 December 2019). The monthly mean ABLHs depicted in
Figure 9 are in accordance with the surface air temperature monthly anomalies, and also the observed variability of the monthly mean ABLHs are related to the average surface air monthly temperature, reported therein.
In
Table 4, the variability of the seasonal mean ABLH values in each year, (winter months (DJF), spring (MAM), summer (JJA), and autumn (SON) for the years of 2008 to 2018 is given. In autumn and winter of 2014 and 2015, the values indicated in brackets cannot be regarded as representative of the seasonal mean (defined as at least 10 days within the 3-month-long season of each year, with at least 6 h at daytime and 6 h at night). Still, these values are given to provide rough information but not as a seasonal mean. The decadal seasonal mean ABLH reached its largest values in the summertime, with an altitude of 1.34 km, and the lowest values in the wintertime of 0.73 km. The mean spring and autumn ABLHs were 1.16 and 0.99 km, respectively.
The seasonal mean ABLHs, listed in
Table 4, indicate for most of the years that for spring and summer the values were above 1.1 km, for autumn below 1.1 km, and during winter below 0.8 km. However, after 2014, the mean height in the spring and the summer seasons was notably higher (200–300 m) than those of the previous years while for the winter season, it was further decreased (of about 200 m). For the years 2008–2013 and 2017–2018, the differences in the seasonal mean ABLH values were relatively small and remained within 400 m, but for 2014–2016, those differences were about twice larger, which should not be solely attributed to the absence of data in 2014 and 2015. The 10-year mean seasonal ABLH was 1.16 ± 0.16 km for spring, 1.34 ± 0.15 km for summer, 0.99 ± 0.11 km for autumn, and 0.73 ± 0.08 km for winter.
If any sampling biases were to critically affect the year-to-year variation of all mean ABLHs in the four seasons for the years 2014–2018 (derived with lidar only), they would be expected to reveal higher values than those of 2008–2012 (derived from ceilometer only), as a systematic error. This is not the case, as, e.g., the results for the winters of 2013–2018 and springs and autumns of 2017–2018 are lower than those derived from 2008 to 2012. As for the decadal mean seasonal variability of ABLH, they are least affected by biases and these values can be used as a reference.
6.3. Variability of Yearly Mean Well-Mixed, Nocturnal, and Residual Boundary Layer Height
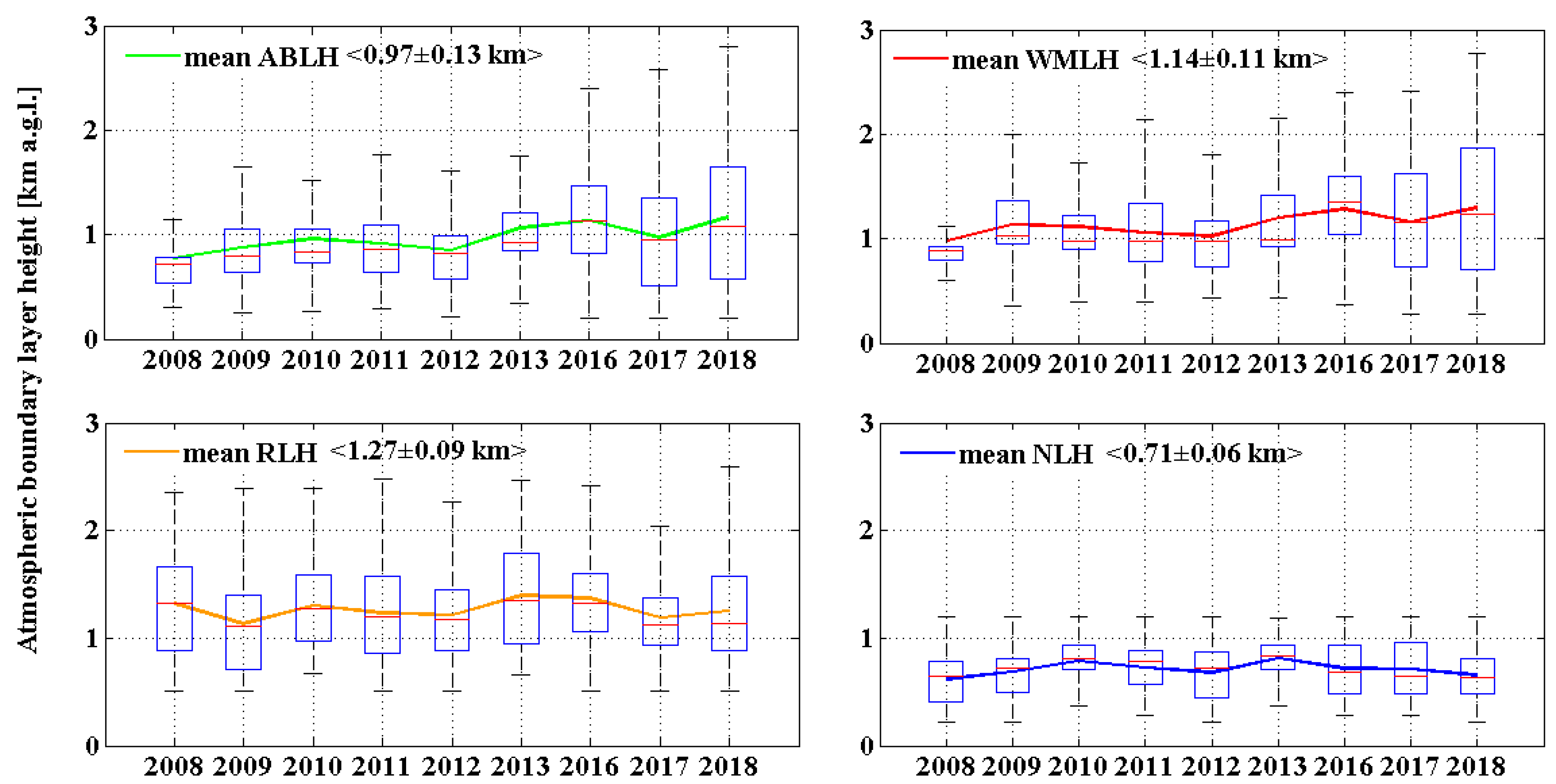
The box and whisker plots depicted in
Figure 10 summarize the variability in the annual mean ABLH values derived for the subset of the clear-sky data (346 days). In this figure, the solid lines indicate the annual mean ABLH obtained for each year, except for the years 2014 and 2015, for which calculation of the annual mean was not possible (too low data availability in autumn and winter months;
Table 3). The annual mean ABLHs (
Figure 10, in green) were the highest in 2016 and 2018. Overall, the annual mean ABLHs were between 0.8 and 1.3 km.
The annual mean WML, NL, and RL in
Figure 10 show that the mean annual WML values have strong similarities with the mean annual ABLHs, with the peaks in 2016 and 2018. The mean annual NL and RL values followed different trends with no distinct peaks; the NL below 0.83 km and the RL between 1.13 and 1.39 km. Lower residual layer heights, being in the range 0.7–1.4 km, were reported for Paris, France and in the range 0.5–0.9 km for Moscow, Russia [
85]. Over Houston, Texas, the nocturnal boundary layer height was reported at 0.25 km throughout the year while the convective boundary layer heights were at 1.1 km in winter and 2 km in summer [
55]. Such differences are not unexpected and can be attributed to the diverse climatic conditions at these sites. Two of them have a temperate climate (1980–2016), i.e., Houston (Cfa) and Paris (Cfb). The two others have a continental climate (1980–2016), i.e., Warsaw (Dfb) and Moscow (Dfc) [
80]. As for the derivation of the nocturnal boundary layer in Warsaw, the lower detection limit at 195 m could have led to a slight overestimation of the derived values. However, even for scanning lidars, where the overlap is claimed to play a negligible role due to the measurement geometry, heights of the boundary layer between 0.5 and 2.4 km were reported for August to October over Slovenia [
86], considered a continental climate of the Dfb type, such as Warsaw [
80].
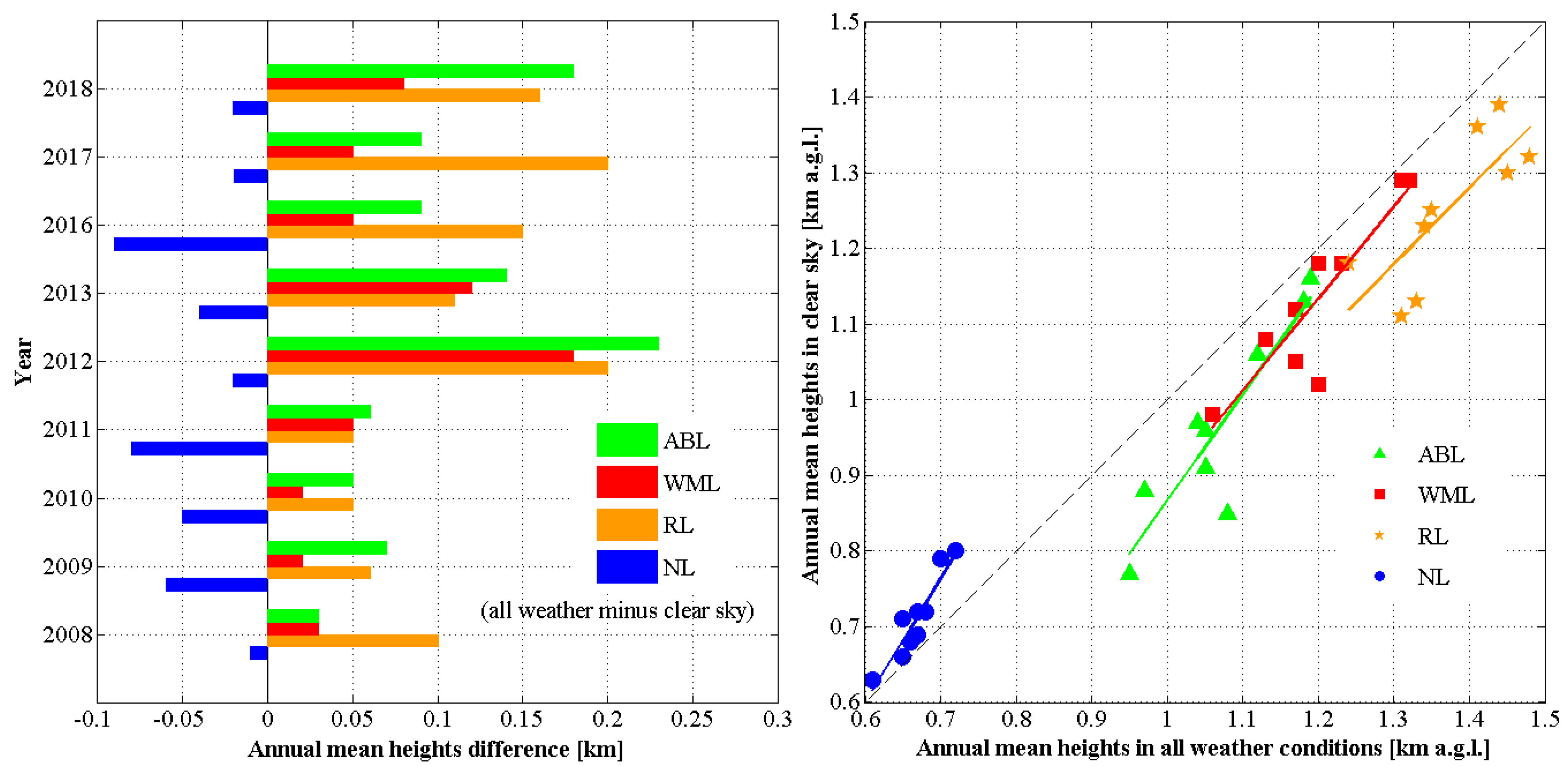
The mean yearly ABLH, WML, RL, and NL values were obtained for the total number of available data (1841 diurnal cycles) as well as for the subset of clear-sky data (346 diurnal cycles). This was done to assess expected differences between those two samples, whereby the temporal separation of the data was taken into account. The bias of the ABLH retrieval performed in the clear-sky and boundary layer clouds is related to clouds forming directly above the boundary layer itself (e.g., in the entrainment zone, <3 km [
1,
2,
3]). The other types of clouds, e.g., generated by the mesoscale frontal weather systems, were not considered (they have been screened, as, in the majority of situations, they are detached from the boundary layer). Therefore, the difference of the annual mean ABLH derived for the all-weather conditions and the clear-sky conditions represents this bias. In
Figure 11, right subfigure, the bias is below 230 m for the ceilometer (2008–2012) and 70 m for the lidar (2016–2018). For the annual mean values of the WML, RL, and NL, the bias is below 250 m for both instruments. Measurements with each instrument indicate different cloud effects, which can be partly attributed to the difference in their design and partly to various atmospheric conditions. The signal-to-noise ratio is lower for the ceilometer than lidar due to the lower laser power, resulting also in a shorter range of the ceilometer signals [
38,
62,
69]. Therefore, lidar is more sensitive for the aerosol and cloud detection. On the other hand, the differences seen for the cloudy conditions in
Figure 11, also have to do with the captured annual variations in the atmospheric conditions for the all-weather data depicted in
Figure 9.
In general, with an increase of the annual mean ABLH, increased heights of the WML, RL, and NL were observed (
Figure 11, left subfigure). The heights of the ABL, WML, and RL were higher for the all-weather conditions than on the clear-sky days. Conversely, the height of the NL under the all-weather conditions was found to be lower compared to its height in the clear-sky days (
Figure 11, right subfigure). Both, an increase in the cloud cover at night and an urban heat island under clear-sky conditions can lead to a deeper ABLH at night. For the data sample collected and analyzed in this paper, the second process seems to be more efficient in Warsaw.
The ABLH under the UHI is the result of processes driven not only by the local surface conditions but also by the regional atmospheric structures [
87]. In the literature, there are some idealized realizations of boundary layers, such as, e.g., in [
1,
2,
3]. Reality is more complicated due to differences in the heat sources, heat capacities, and surface roughness, e.g., the classic evolution of a daytime convective boundary layer distribution as affected by advection of dry air and gravity waves was reported by [
88]. In the current paper, not all those regimes were studied.
Several studies reported in the literature are limited to the clear-sky daytime conditions and provide only the maximum ABLH. For instance, for an urban continental site in Leipzig, Germany, the afternoon ABLHs corresponding to the well-mixed layer height were reported, with a maximum value at approximately 1.4 km in spring, 1.8 km in summer, 1.2 km in autumn, and 0.8 km in winter, as derived from single-year observations [
25]. The maximum ABLHs in the current study were found even beyond 2 km in Warsaw, Poland. The mean ABLHs in Warsaw, calculated for the different seasons and years, are reported as being in the range of circa 250 m lower than the maximum values reported for Leipzig [
25]. The annual cycle of convective boundary layer heights in summer and winter reported above the Swiss Plateau [
44] had values far from those derived for Warsaw and Leipzig. Over Neuchâtel, Switzerland, the nighttime residual heights detected with lidar were reported as changing from 0.5 to 1.5 km [
21]. In Barcelona, Spain, the well-mixed boundary layer was reported between 0.3 and 1.45 km in summer and between 0.39 and 1.42 km in winter, showing almost no seasonal difference, unlike in Warsaw [
37]. The discrepancies of the values reported within the current study and the mentioned publications are attributed to the differences in the localization of cities/regions (coastal, plateau, inland). Also, the distinct climatological conditions add to these differences.
It has been reported that the aerosol optical properties derived within the boundary layer (divided to the different temporal regimes: WML, TL, NL, and RL) show significant differences in Warsaw, especially for the diurnal variation [
52]. Thus, high-quality retrieval of the ALBH at daytime and nighttime is crucial. Note that the analysis of
Figure 11 relies on cloud characteristics (cloud cover, cloud base height, cloud type), therefore its interpretation is not straightforward.
The dependence of the temperature on cloud cover is strong in the middle latitudes [
89]. During the daytime, an increase in cloud cover can restrict the incoming solar radiation, and thus, decrease surface temperatures. However, at night, an increase in the cloud cover is expected to reduce the long-wave cooling (i.e., warmer surface temperatures), and thus lead to a deeper ABLH at night (e.g., in [
14]). The cloud cover and type influence the boundary layer characteristics; the mixed layer height may vary distinctly depending on the frequency and cloud types present [
53]. Moreover, the global temperature rise, reinforced in urbanized areas by the anthropogenic heat flux, leads to an intensified convection process and increased precipitation (especially torrential rain), causing thermal and hydrological hazards in large conurbations. The areas currently exposed to thermal and urban flood hazards in Warsaw were identified and assessed in the recent work of [
83].
6.4. Frequency Distribution of Daytime and Nighttime Boundary Layer Height
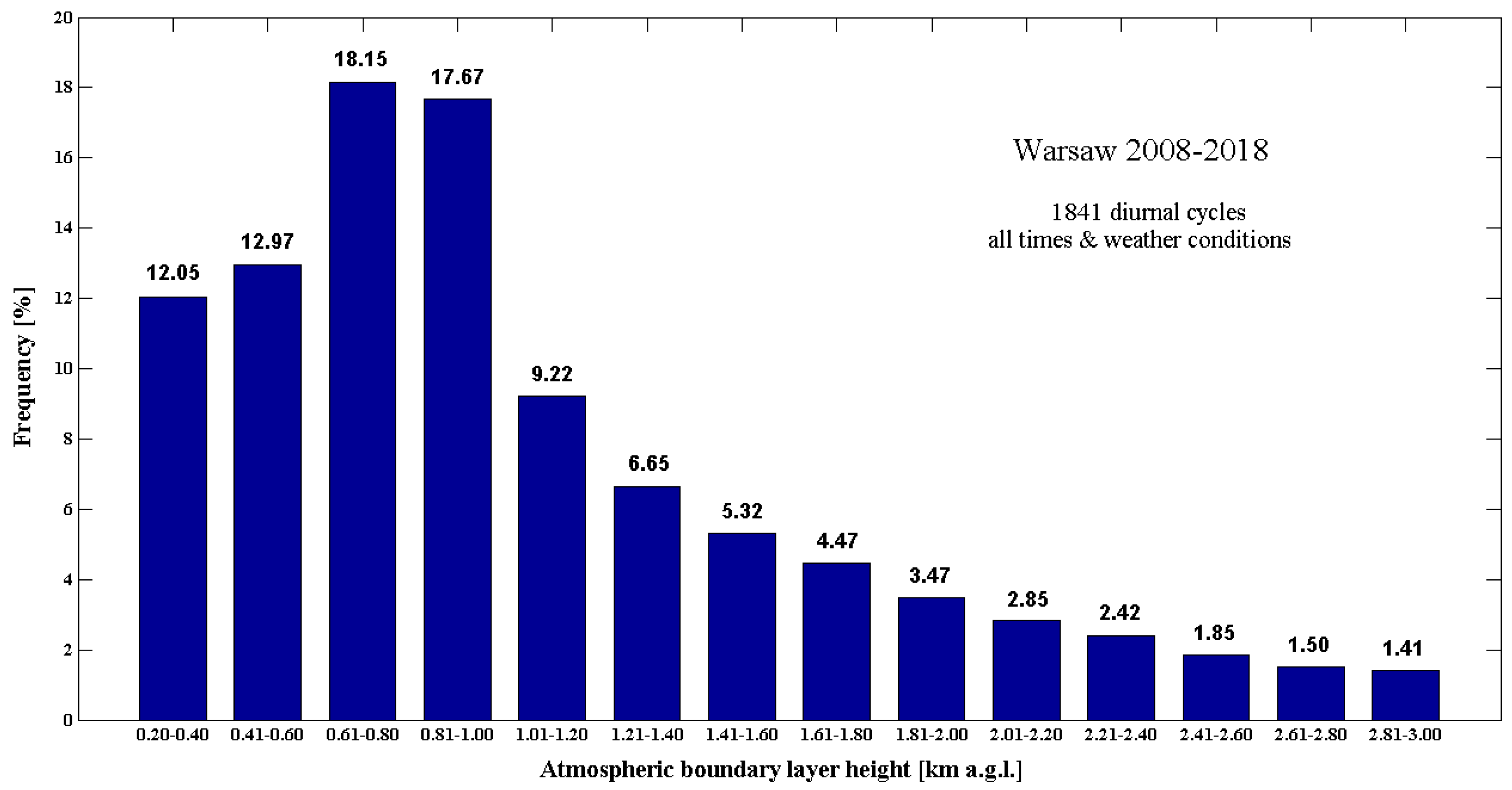
In order to indicate on the total distribution of ABLH within 2008–2018 over Warsaw, the histogram of the frequency distribution of the ABLH derived for the 1841 diurnal cycles is depicted in
Figure 12. All hours were used, hence there is no bias for any particular time of day.
The asymmetric positive skew distribution with the right tail significantly longer and with the mean value higher than the median was obtained. The ABLH values up to 1 km had a frequency of more than 60% of the entire data sample. The ABLH distribution was dominated with the values between 0.6 and 1 km (the class 0.6–0.8 km was the most frequent, with the percentage of 18.15%, followed by the class 0.8–1 km, with a frequency of 17.67%). Then, the values between 0.2 and 0.6 km were significantly frequent (class 0.4–0.6 km (12.07%), followed by the class 0.2–0.4 km (12.05%).
For higher altitudes (>1 km), as the ABLH increased, their occurrence gradually decreased. Rarely, the ABLH values reached altitudes of 2.4 to 3 km, which accounts for only 4.76% of the whole data sample. The obtained frequency distribution can be used as a reference for comparison with other measurement sites, e.g., as in [
74], whereby a distinction can be made between, e.g., the daytime and nighttime distributions.
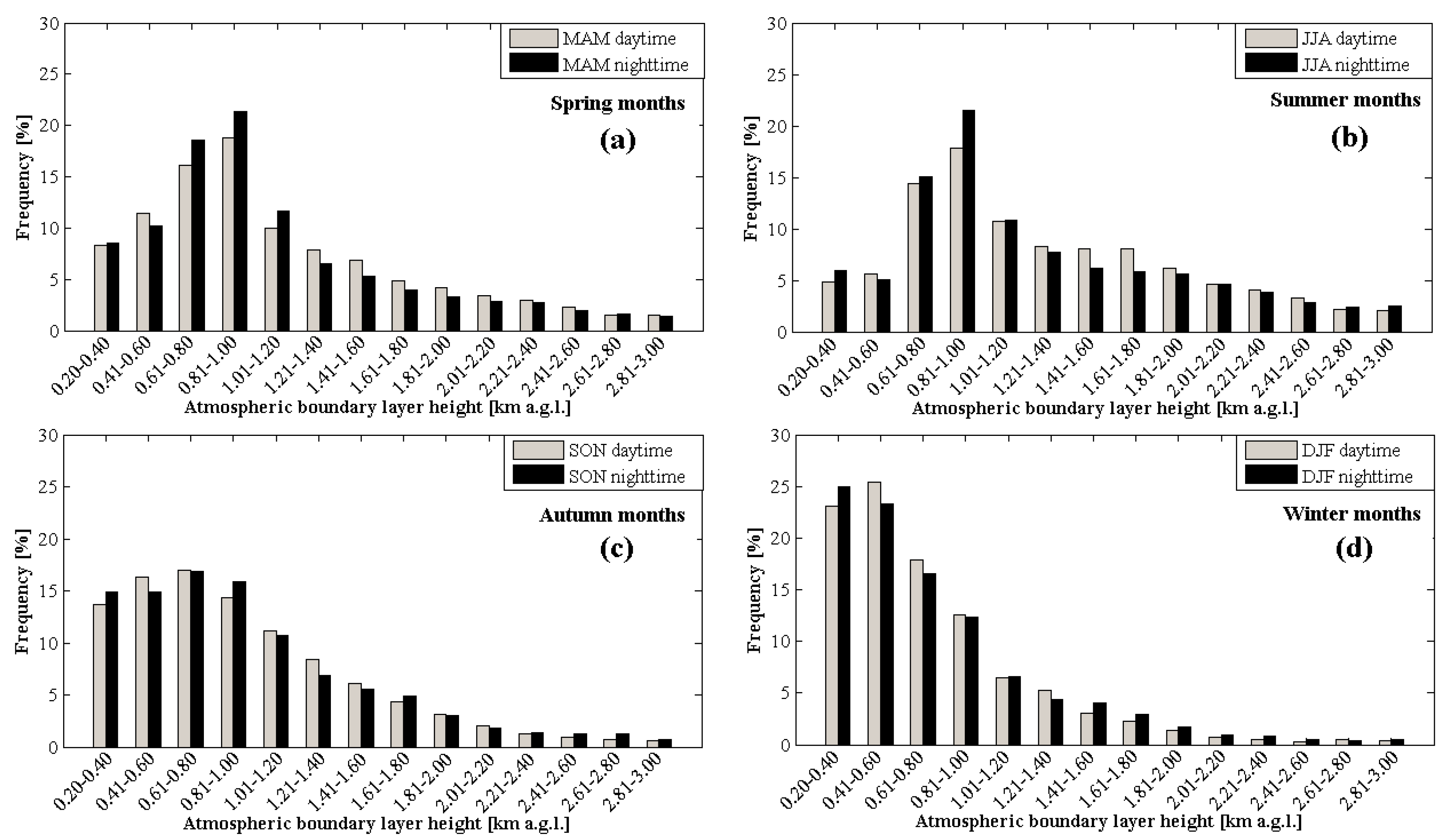
Additionally, a detailed investigation of the ABLH frequency distribution was performed with respect to the time of day and for the different seasons of the year. The frequency distribution histograms are plotted in
Figure 13, where the daytime frequencies are given in grey and nighttime in black.
In spring and summer (
Figure 13a,b), the ABLHs were most often within the range of 0.6 to 1 km; this being a distinct maximum of the occurrence frequency of 30% to 40%. In general, at the ranges up to 1.2 km, the ABLH occurrence at nighttime was practically always slightly higher than at daytime (expect for winter); above this height, an opposite trend occurred. For winter and autumn, no such trends are observed. In the summer months (
Figure 13b), a visibly higher frequency of ABLHs over 1.4 km was observed, as compared to the other seasons. This is consistent with the fact that in summer, more solar radiation is expected to be absorbed by both land and atmosphere, which is then attributed to a stronger variation of the heat flux, turbulence, and more active energy exchange. Consequently, this leads to a lofted ABLH during the summer months. On the contrary, most of the ABLH values during the winter season (
Figure 13d) occurred within the range between 0.2 and 0.6 km (~50%, at both, day and night). In winter, the occurrence of ABLH above 1.8 km is negligible (<5%). During the autumn months (
Figure 13c), the distribution of the ABLH values within 0.2 and 1 km was well balanced, with frequencies between 14% to 16% (in total ~60%), at both, day and night.
Notably, a few ABLHs above 2.8 km were found in all four seasons, regardless of during the daytime or nighttime. A reasonable explanation for such observations at daytime may be stronger turbulent mixing and exchange processes between the surface and the free troposphere, which contribute to a relatively high ABLH between noon and the late afternoon (e.g., [
52,
75]). As for an ABLH above 2.8 km during the night, it may be attributed to at least to two reasons. Either there were aerosols remaining after sunset, which developed a residual layer when the temperatures declined during the course of the night (e.g., an extremely high boundary layer (up to 3 km), driven by a severe heat wave conditions, discussed in detail in [
11]). Or the tested boundary layer retrieval methods (GDT, STD, and WCT) were, to some extent, influenced by the atmospheric stratification (particularly in complex advection-pronounced conditions), as these algorithms always find the largest signal change. These factors, each alone or in interplay, may have led to a higher ABLH during the nighttime. The ABLH values found above 2.8 km in autumn and winter are considered as limitations of the applied methodology. Note that no passing clouds appeared for the ABLHs found at the range 2.8–3 km.
As expected for an urban continental site in Central–East Europe, a strong seasonal variability of the ABLH distribution (in height and shape) was observed. The spring distribution (
Figure 13a) clearly dominated the total distribution (
Figure 12). The ABLH distribution peak and shape varied strongly with the seasons. The peak of ABLHs between 0.6 and 1 km was observed in spring, then it became sharper (0.8–1 km) in summer, just to flatten in autumn as an equal spread between 0.2 and 1 km, and finally to peak in winter at 0.2 to 0.6 km. The study of the boundary layer height over Europe, derived based on the bulk-Ri number from the rawinsondes, revealed that 50% of all ABLH values at daytime are generally <1 km and at nighttime <0.5 km [
51]. The seasonal patterns for the daytime and nighttime can significantly differ; daytime heights larger in summer than in winter, but the nighttime heights larger in winter, were reported by [
45]. These variability trends obtained over Europe are similar to the results for Warsaw. The differences are therefore due to the physical basis for instruments’/algorithms’ working principles as well as the specific weather or air quality-related episodes.
7. Conclusions
Measurements conducted at the same wavelength (1064 nm) using the CHM15k ceilometer (2008 to 2013) and the PollyXT lidar (2013 to 2018) were homogenized, combined, and deployed to determine the atmospheric boundary layer characteristics. The height, structure, and evolution of ABLH were obtained for 1841 observations of diurnal cycles over the city center of Warsaw, Poland. For comparative study, 4 months of collocated ceilometer and lidar measurements (July–October 2013) were chosen. For this period, the ABLH was determined also from the WMO rawinsondes launched at noon and midnight in Legionowo (25 km, North).
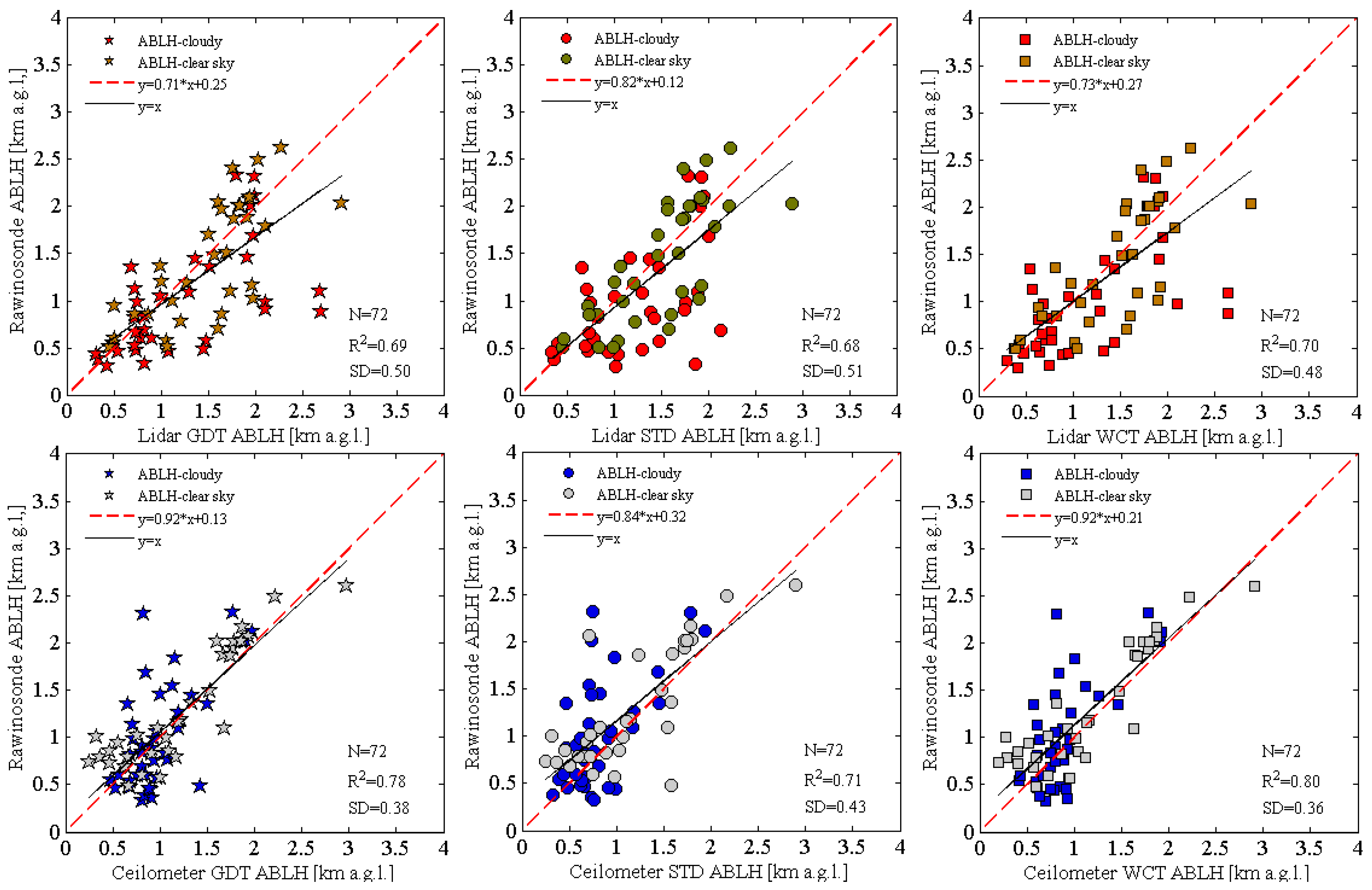
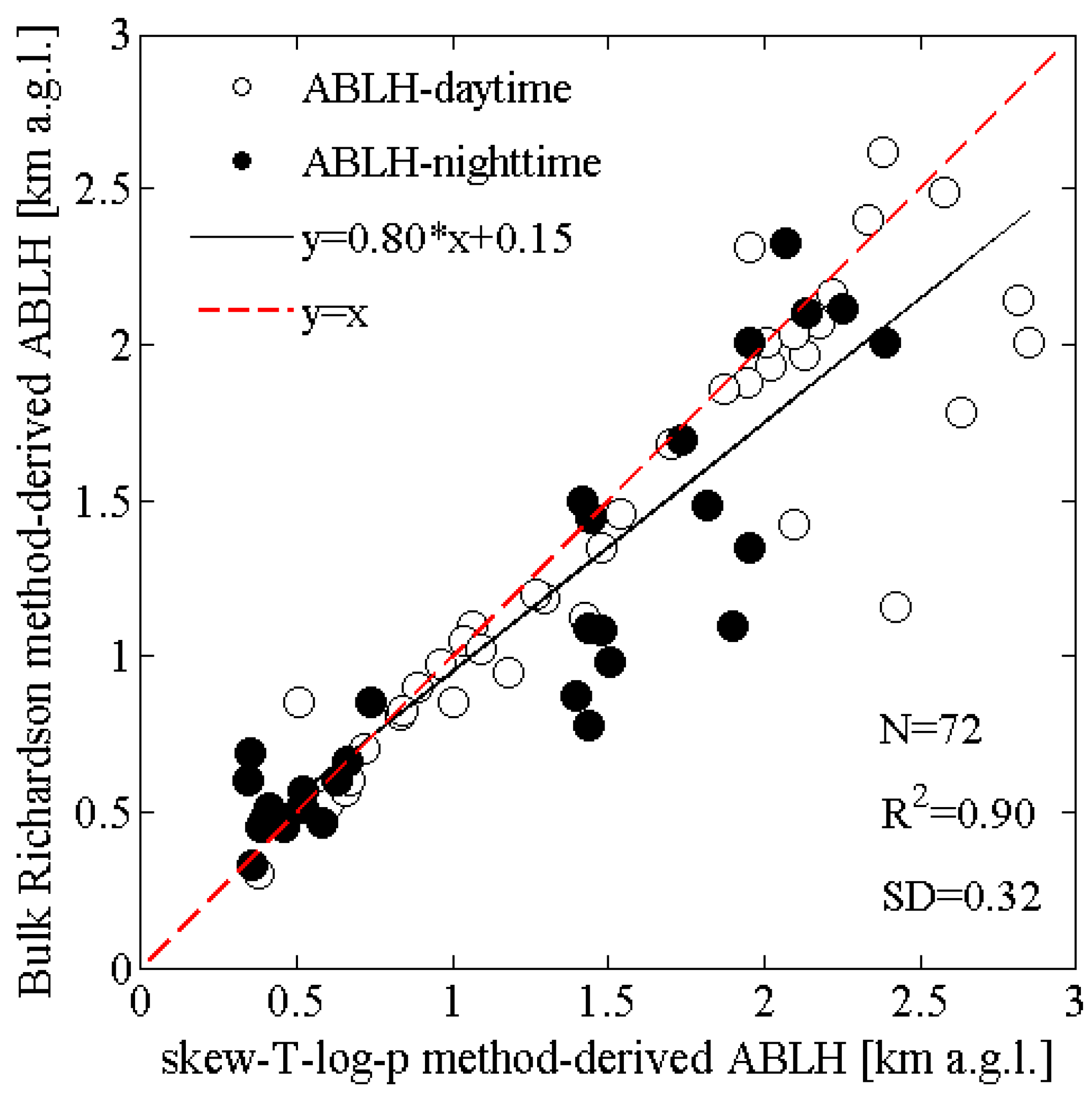
The bulk Richardson (bulk-Ri) method was found more favorable than the skew-T-log-P for ABLH detection from rawinsondes. The lidar and ceilometer ABLHs in Warsaw, obtained with the gradient method (GDT), standard deviation method (STD), and wavelet covariance transform method (WCT), exhibited relatively high correlations (R2 of 0.68–0.80 with SD of 360–510 m), in comparison with the rawinsondes ABLHs obtained by using the bulk-Ri method. The WCT results indicated an ability to detect ABLHs more accurately than the GDT and the STD methods. The ceilometer-derived ABLHs were assessed as more reliable (more similar to the rawinsondes’ retrievals).
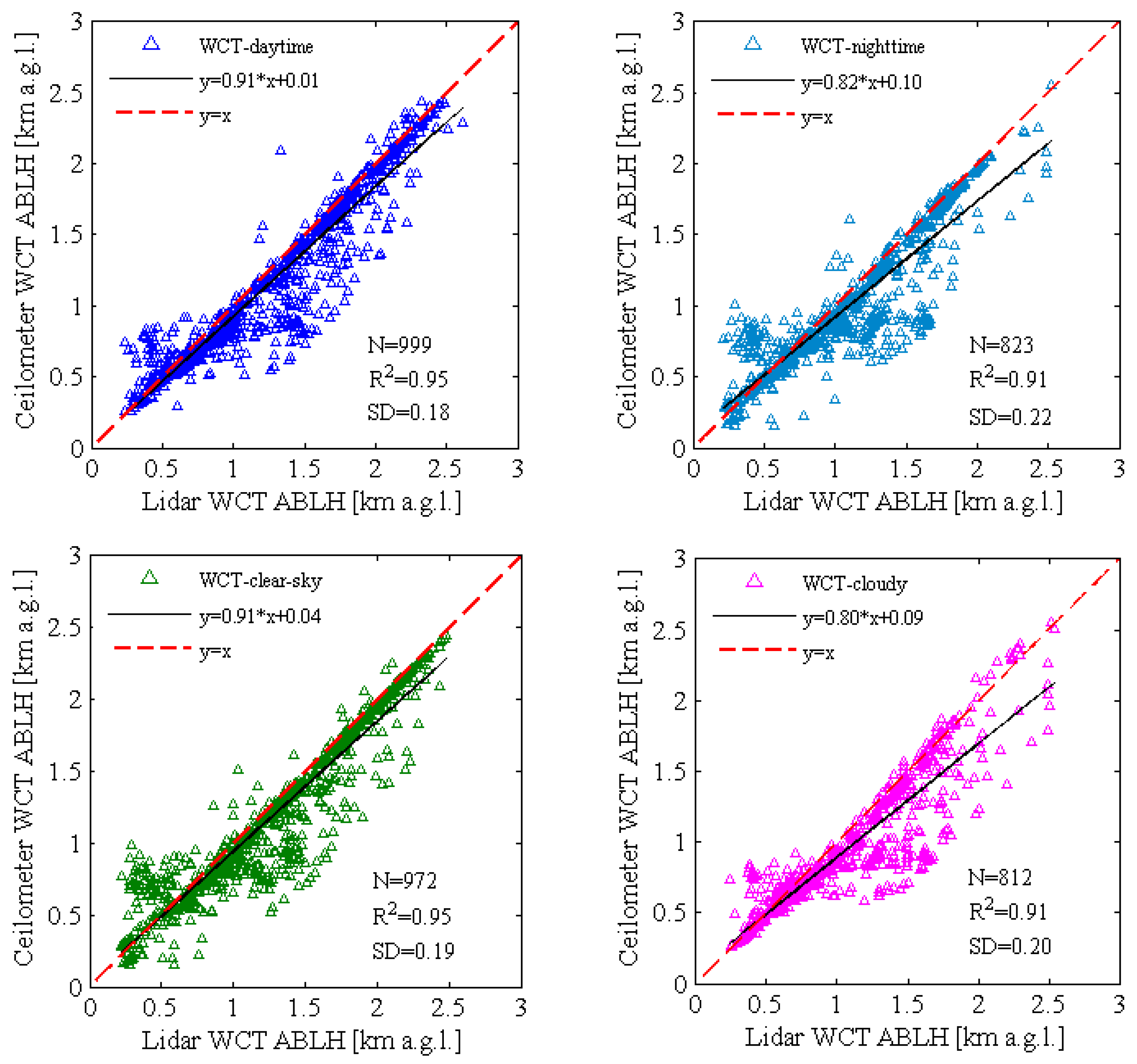
The lidar–ceilometer direct comparisons revealed significantly higher correlations (R2 of 0.93–0.94 with SD of 190–200 m). The algorithms developed for homogenization of the ceilometer and lidar datasets reduced this bias to only 110 m. The WCT method performed well at day and nighttime in different conditions. The bias of ABLH retrieval in the clear-sky to the cloudy-conditions was <230 m for ceilometer and <70 m for lidar. Currently, this bias cannot be corrected.
The statistical analysis of the long-term datasets (2008–2018, 1841 diurnal cycles) revealed that the annual cycles of the monthly mean ABLHs (calculated for all days; clear sky and with boundary layer clouds) in Warsaw ranged from approximately 0.6 to 1.8 km, throughout the years. The lowest monthly mean ABLHs were derived for the winters of 2016 and 2018, and the highest for the springs and summers of 2014, 2015, and 2016.
The average monthly diurnal cycles of ABLH derived for clear-sky data showed pronounced changes: (i) A gradual transition from spring months (0.7–1.2 km) to summer months (0.9–1.7 km) with maximum values in August; (ii) the cycle for September (autumn) strongly resembled the cycles of June and July, indicating prolongation of the summer season; (iii) a decline of mean monthly ABLHs in mid-autumn (0.6–0.9 km) and a smooth transition to winter; (iv) the lowest mean values (below 0.6 km) in the winter months with spectacular flattening of the January cycle shape; and v) the abrupt change between the winter and spring season due to the regional climate change.
The annual mean ABLH in clear-sky conditions over Warsaw was obtained for the years from 2008 to 2018, except for 2014 and 2015 (significant absence of measurements in autumn and winter months). The annual mean ABLHs were maintained between 0.77 and 1.16 km, whereby the annual mean well-mixed boundary height ranged from 0.98 to 1.29 km, the annual mean residual layer from 1.13 to 1.39 km, and the annual mean nocturnal layer from 0.62 to 0.81 km. The seasonal mean ABLH was 1.16 ± 0.16 km in spring, 1.34 ± 0.15 km in summer, 0.99 ± 0.11 km in autumn, and 0.73 ± 0.08 km in winter.
The frequency distribution revealed ABLHs occurring below 1 km as constituting more than 60% of the total data. A strong seasonal variability of the ABLH distribution was observed (the spring distribution clearly dominated the total distribution). ABLHs between 0.6 and 1 km were most frequent during spring and summer (>35% and >30% of all data, respectively). In autumn, the distribution flattened (60% of data equally spread between 0.2 and 1 km). In winter, the distribution peak was between 0.2 and 0.8 km (~70% of data) to fall quasi-exponentially above 0.8 km.
The nighttime and daytime ABLH distribution revealed significant differences; heights reaching beyond 1.2 km were more often observed at daytime in all seasons (except winter). An opposite trend was observed below 1.2 km. Regardless of the time of day, the ABLHs above 1.2 km are more frequent in summer than during the other seasons while the ABLHs below 0.6 km account for the main part of the observations during the winter and autumn months. Due to the occurrence of residual lofted aerosols, the ABLHs exceeding 2.8 km were observed sporadically regardless of the season (<5% summer, <1% winter).
Recently, available methods for the ABLH retrieval from the lidar and ceilometer observations were summarized in a review paper [
18], which concludes that although many techniques have been proposed in the literature, it is still impossible to recommend a technique that is suitable in all atmospheric scenarios. In the current paper, an approach of scaling the lidar-derived ABLH to homogenize them with the ceilometer-derived ABLH was proposed and was applied with success, providing comparable products from both instruments.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}