Remote Sensing of Ecosystem Structure: Fusing Passive and Active Remotely Sensed Data to Characterize a Deltaic Wetland Landscape


Abstract
:
1. Introduction
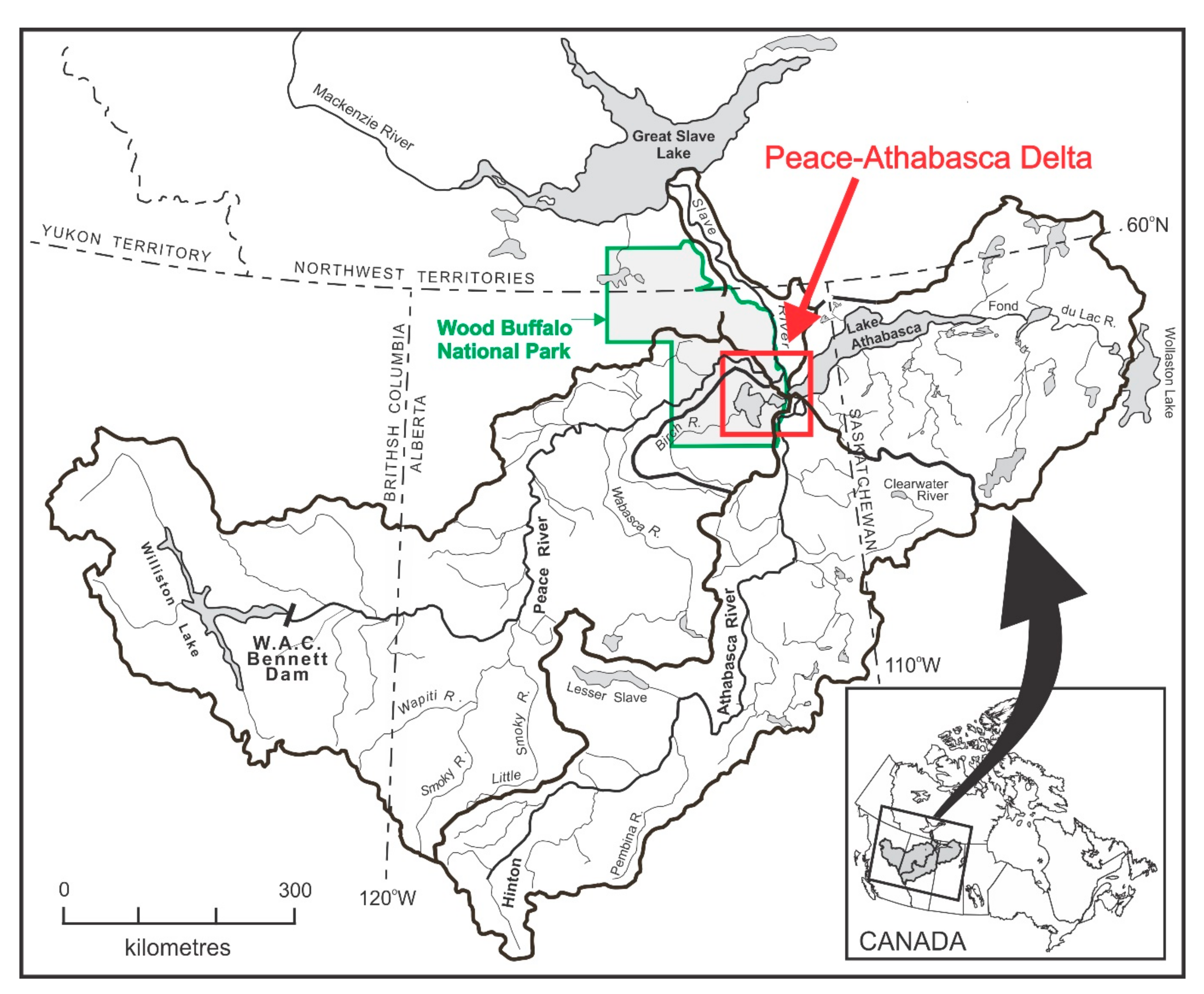
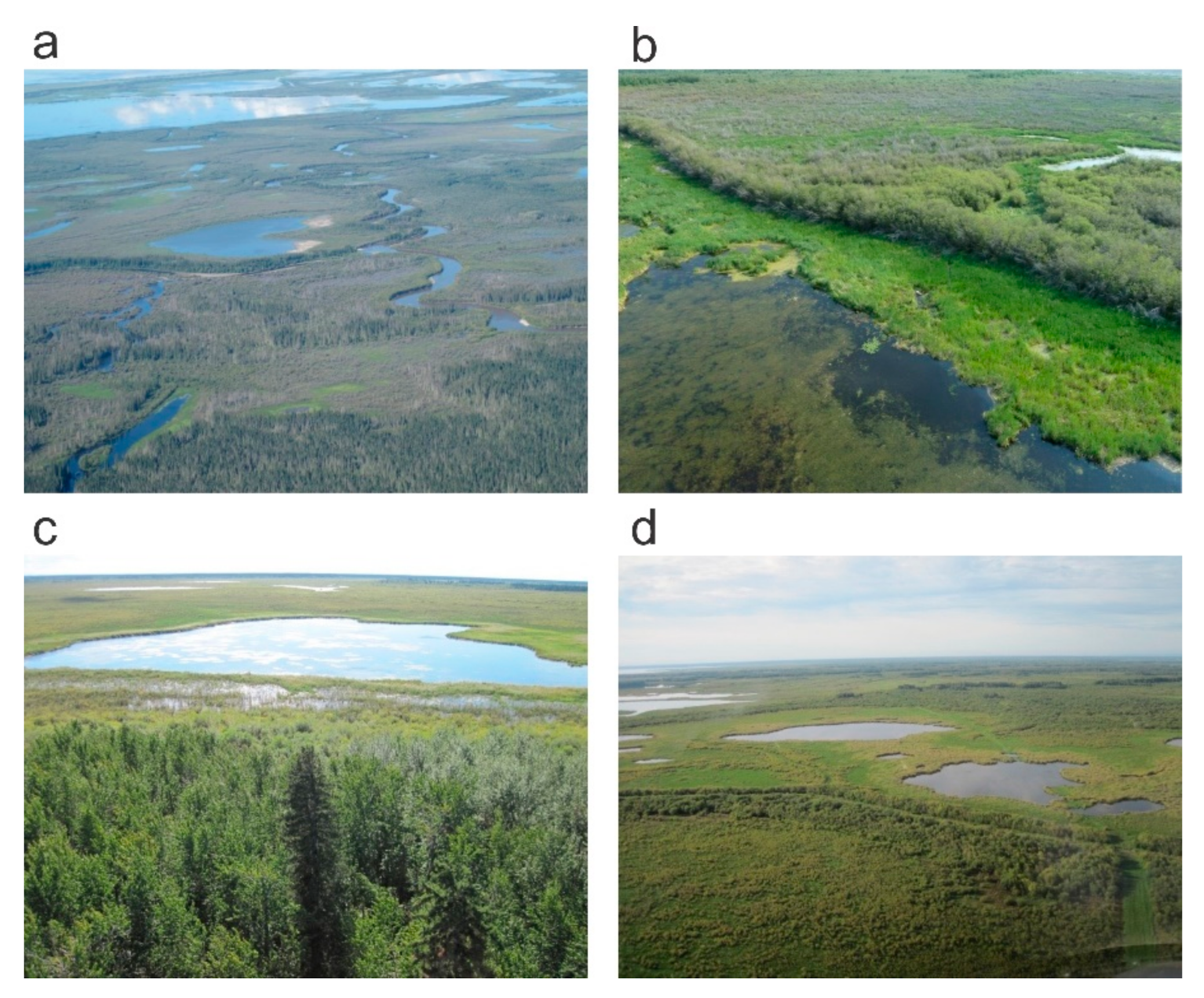
2. Study Site
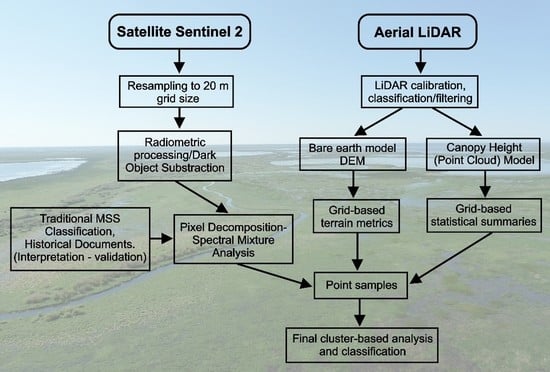
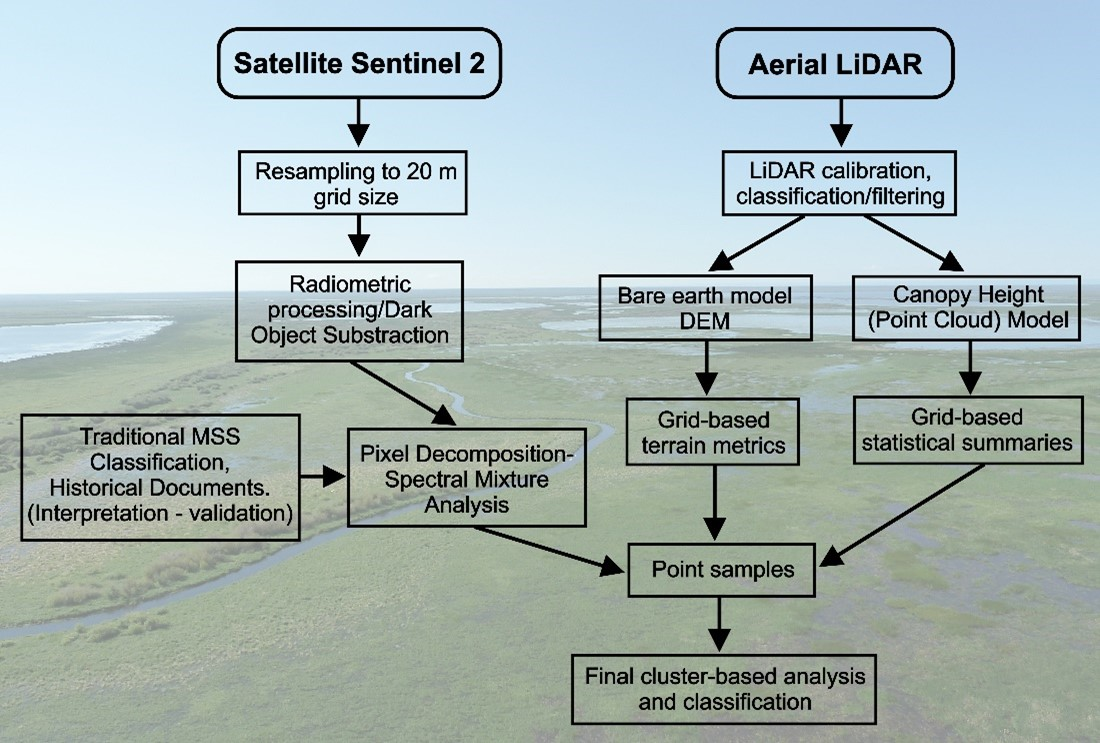
3. Data and Processing
3.1. Sentinel-2 Data
3.2. Sentinel Data Processing
3.3. LiDAR
3.4. LiDAR Data Processing
3.5. Statistical Analysis
4. Results and Discussion
5. Conclusions and Future Considerations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Environmental Protection Agency Wetlands. Available online: https://www.epa.gov/wetlands/why-are-wetlands-important (accessed on 15 September 2020).
- Ducks Unlimited Wetlands. Available online: https://www.ducks.ca/our-work/wetlands/ (accessed on 15 September 2020).
- Nature Conservancy Canada All about Wetlands. Available online: https://www.natureconservancy.ca/en/blog/archive/all-about-wetlands.html#.XaobTEnsaUk (accessed on 15 September 2020).
- Ramsar Homepage. Available online: https://www.ramsar.org/ (accessed on 29 August 2020).
- Malty, E.; Baker, T. The Wetlands Handbook; Blackwell Publishing Ltd.: Hoboken, NJ, USA, 2009; ISBN 978-0-632-05255-4. [Google Scholar]
- National Wetlands Working Group (NWWG). The Canadian Wetland Classification System, 2nd ed.; Warner, B.G., Rubec, C.D.A., Eds.; Wetlands Research Centre, University of Waterloo: Waterloo, ON, Canada, 1997. [Google Scholar]
- Federal Geographic Data Committee Classification of Wetlands and Deepwater Habitats of the United States. Wetlands Subcommittee. Available online: https://www.fgdc.gov/ (accessed on 15 September 2020).
- Schindler, D. Sustaining Aquatic Ecosystems in Boreal Regions. Conserv. Ecol. 1998, 2. [Google Scholar] [CrossRef] [Green Version]
- Lomnicky, G.A.; Herlihy, A.T.; Kaufmann, P.R. Quantifying the extent of human disturbance activities and anthropogenic stressors in wetlands across the conterminous United States: Results from the National Wetland Condition Assessment. Environ. Monit. Assess. 2019, 191, 324. [Google Scholar] [CrossRef] [Green Version]
- Davidson, N.C. Wetland Losses and the Status of Wetland-Dependent Species. In The Wetland Book: II: Distribution, Description and Conservation; Finlayson, C.M., Milton, G.R., Prentice, R.C., Davidson, N.C., Eds.; Springer: Dordrecht, The Netherlands, 2016; pp. 1–14. ISBN 978-94-007-6173-5. [Google Scholar]
- Bergkamp, G.; McCartney, M.; Dugan, P.; McNeely, J.A.; Acreman, M. Dams, Ecosystem Functions and Environmental Restoration: Final Version; World Commission on Dams: Cape Town, South Africa, 2000. [Google Scholar]
- Rooney, R.C.; Bayley, S.E.; Schindler, D.W. Oil sands mining and reclamation cause massive loss of peatland and stored carbon. Proc. Natl. Acad. Sci. USA 2012, 109, 4933–4937. [Google Scholar] [CrossRef] [Green Version]
- Green, A.J.; Alcorlo, P.; Peeters, E.T.; Morris, E.P.; Espinar, J.L.; Bravo-Utrera, M.A.; Bustamante, J.; Díaz-Delgado, R.; Koelmans, A.A.; Mateo, R.; et al. Creating a safe operating space for wetlands in a changing climate. Front. Ecol. Environ. 2017, 15, 99–107. [Google Scholar] [CrossRef] [Green Version]
- Junk, W.J.; An, S.; Finlayson, C.M.; Gopal, B.; Květ, J.; Mitchell, S.A.; Mitsch, W.J.; Robarts, R.D. Current state of knowledge regarding the world’s wetlands and their future under global climate change: A synthesis. Aquat. Sci. 2013, 75, 151–167. [Google Scholar] [CrossRef] [Green Version]
- Spence, C.; Whitfield, P.H.; Pomeroy, J.W.; Pietroniro, A.; Burn, D.H.; Peters, D.L.; St-Hilaire, A. A review of the Prediction in Ungauged Basins (PUB) decade in Canada. Can. Water Resour. J. Rev. Can. Ressour. Hydr. 2013, 38, 253–262. [Google Scholar] [CrossRef]
- Kotze, D.C. The effects of fire on wetland structure and functioning. Afr. J. Aquat. Sci. 2013, 38, 237–247. [Google Scholar] [CrossRef]
- Okruszko, T.; Duel, H.; Acreman, M.; Grygoruk, M.; Flörke, M.; Schneider, C. Broad-scale ecosystem services of European wetlands—Overview of the current situation and future perspectives under different climate and water management scenarios. Hydrol. Sci. J. 2011, 56, 1501–1517. [Google Scholar] [CrossRef]
- Bonsal, B.; Peters, D.L.; Seglenieks, F.; Rivera, A.; Berg, A. Changes in freshwater availability across Canada. In Canada’s Changing Climate Report; Bush, E., Lemmen, D.S., Eds.; Government of Canada: Ottawa, ON, Canada, 2019; pp. 261–342. [Google Scholar]
- Pearce-Higgins, J.W.; Eglington, S.M.; Martay, B.; Chamberlain, D.E. Drivers of climate change impacts on bird communities. J. Anim. Ecol. 2015, 84, 943–954. [Google Scholar] [CrossRef] [PubMed]
- Tagliapietra, D.; Povilanskas, R.; Razinkovas-Baziukas, A.; Taminskas, J. Emerald Growth: A New Framework Concept for Managing Ecological Quality and Ecosystem Services of Transitional Waters. Water 2020, 12, 894. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, H.; Povilanskas, R.; Stybel, N. Transboundary Management of Transitional Waters—Code of Conduct and Good Practice Examples; Coastline Reports 19 (2012); EUCC–Die Küsten Union Deutschland: Rostock, Germany, 2012; ISBN 978-3-939206-04-0. [Google Scholar]
- Wu, Y.; Zhang, G.; Rousseau, A.N. Quantitative assessment on basin-scale hydrological services of wetlands. Sci. China Earth Sci. 2020, 63, 279–291. [Google Scholar] [CrossRef]
- Lavorel, S.; Grigulis, K.; Lamarque, P.; Colace, M.-P.; Garden, D.; Girel, J.; Pellet, G.; Douzet, R. Using plant functional traits to understand the landscape distribution of multiple ecosystem services. J. Ecol. 2011, 99, 135–147. [Google Scholar] [CrossRef]
- Mason, N.W.H.; Mouillot, D.; Lee, W.G.; Wilson, J.B. Functional richness, functional evenness and functional divergence: The primary components of functional diversity. Oikos 2005, 111, 112–118. [Google Scholar] [CrossRef]
- Tilman, D.; Reich, P.B.; Knops, J.; Wedin, D.; Mielke, T.; Lehman, C. Diversity and Productivity in a Long-Term Grassland Experiment. Science 2001, 294, 843–845. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roy, M.-C.; Azeria, E.T.; Locky, D.; Gibson, J.J. Plant functional traits as indicator of the ecological condition of wetlands in the Grassland and Parkland of Alberta, Canada. Ecol. Indic. 2019, 98, 483–491. [Google Scholar] [CrossRef]
- Martínez, O.J.A.; Fremier, A.K.; Günter, S.; Bendaña, Z.R.; Vierling, L.; Galbraith, S.M.; Bosque-Pérez, N.A.; Ordoñez, J.C. Scaling up functional traits for ecosystem services with remote sensing: Concepts and methods. Ecol. Evol. 2016, 6, 4359–4371. [Google Scholar] [CrossRef] [PubMed]
- Díaz, S.; Cabido, M. Vive la différence: Plant functional diversity matters to ecosystem processes. Trends Ecol. Evol. 2001, 16, 646–655. [Google Scholar] [CrossRef]
- Pereira, H.M.; Ferrier, S.; Walters, M.; Geller, G.N.; Jongman, R.H.G.; Scholes, R.J.; Bruford, M.W.; Brummitt, N.; Butchart, S.H.M.; Cardoso, A.C.; et al. Essential Biodiversity Variables. Science 2013, 339, 277–278. [Google Scholar] [CrossRef] [Green Version]
- Jetz, W.; McGeoch, M.A.; Guralnick, R.; Ferrier, S.; Beck, J.; Costello, M.J.; Fernandez, M.; Geller, G.N.; Keil, P.; Merow, C.; et al. Essential biodiversity variables for mapping and monitoring species populations. Nat. Ecol. Evol. 2019, 3, 539–551. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Li, J.; Sheng, C.; Xu, J.; Wu, L. A Review of Wetland Remote Sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef] [Green Version]
- Chasmer, L.; Mahoney, C.; Millard, K.; Nelson, K.; Peters, D.; Merchant, M.; Hopkinson, C.; Brisco, B.; Niemann, O.; Montgomery, J.; et al. Remote Sensing of Boreal Wetlands 2: Methods for Evaluating Boreal Wetland Ecosystem State and Drivers of Change. Remote Sens. 2020, 12, 1321. [Google Scholar] [CrossRef] [Green Version]
- Hill, M.J. Vegetation index suites as indicators of vegetation state in grassland and savanna: An analysis with simulated SENTINEL 2 data for a North American transect. Remote Sens. Environ. 2013, 137, 94–111. [Google Scholar] [CrossRef]
- Song, C.; Dannenberg, M.P.; Hwang, T. Optical remote sensing of terrestrial ecosystem primary productivity. Prog. Phys. Geogr. 2013. [Google Scholar] [CrossRef]
- Morandeira, N.S.; Grings, F.; Facchinetti, C.; Kandus, P. Mapping Plant Functional Types in Floodplain Wetlands: An Analysis of C-Band Polarimetric SAR Data from RADARSAT-2. Remote Sens. 2016, 8, 174. [Google Scholar] [CrossRef] [Green Version]
- Short, N.; Brisco, B.; Couture, N.; Pollard, W.; Murnaghan, K.; Budkewitsch, P. A comparison of TerraSAR-X, RADARSAT-2 and ALOS-PALSAR interferometry for monitoring permafrost environments, case study from Herschel Island, Canada. Remote Sens. Environ. 2011, 115, 3491–3506. [Google Scholar] [CrossRef]
- Gallant, A.L. The Challenges of Remote Monitoring of Wetlands. Remote Sens. 2015, 7, 10938–10950. [Google Scholar] [CrossRef] [Green Version]
- Siles, G.; Trudel, M.; Peters, D.L.; Leconte, R. Hydrological monitoring of high-latitude shallow water bodies from high-resolution space-borne D-InSAR. Remote Sens. Environ. 2020, 236, 111444. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Montgomery, J.; Petrone, R. A Physically Based Terrain Morphology and Vegetation Structural Classification for Wetlands of the Boreal Plains, Alberta, Canada. Can. J. Remote Sens. 2016, 42, 521–540. [Google Scholar] [CrossRef]
- Töyrä, J.; Pietroniro, A. Towards operational monitoring of a northern wetland using geomatics-based techniques. Remote Sens. Environ. 2005, 97, 174–191. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar Remote Sensing of the Canopy Structure and Biophysical Properties of Douglas-Fir Western Hemlock Forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Niemann, O. Evaluation of Emerging Remote Sensing Technologies for the Assessment of Forest Resources; Department of Geography, University of Victoria: Victoria, BC, Canada, 2009. [Google Scholar]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. For. Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E. Spectral and chemical analysis of tropical forests: Scaling from leaf to canopy levels. Remote Sens. Environ. 2008, 112, 3958–3970. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E. Airborne spectranomics: Mapping canopy chemical and taxonomic diversity in tropical forests. Front. Ecol. Environ. 2009, 7, 269–276. [Google Scholar] [CrossRef] [Green Version]
- Asner, G.P.; Martin, R.E. Spectranomics: Emerging science and conservation opportunities at the interface of biodiversity and remote sensing. Glob. Ecol. Conserv. 2016, 8, 212–219. [Google Scholar] [CrossRef] [Green Version]
- Cook, B.D.; Bolstad, P.V.; Næsset, E.; Anderson, R.S.; Garrigues, S.; Morisette, J.T.; Nickeson, J.; Davis, K.J. Using LiDAR and quickbird data to model plant production and quantify uncertainties associated with wetland detection and land cover generalizations. Remote Sens. Environ. 2009, 113, 2366–2379. [Google Scholar] [CrossRef]
- Montgomery, J.; Brisco, B.; Chasmer, L.; Devito, K.; Cobbaert, D.; Hopkinson, C. SAR and Lidar Temporal Data Fusion Approaches to Boreal Wetland Ecosystem Monitoring. Remote Sens. 2019, 11, 161. [Google Scholar] [CrossRef] [Green Version]
- Schneider, F.D.; Morsdorf, F.; Schmid, B.; Petchey, O.L.; Hueni, A.; Schimel, D.S.; Schaepman, M.E. Mapping functional diversity from remotely sensed morphological and physiological forest traits. Nat. Commun. 2017, 8, 1441. [Google Scholar] [CrossRef] [Green Version]
- Timoney, K.P. The Peace-Athabasca Delta: Portrait of a Dynamic Ecosystem; The University of Alberta Press: Edmonton, AB, Canada, 2013; ISBN 978-0-88864-730-6. [Google Scholar]
- Bush, A.; Monk, W.A.; Compson, Z.G.; Peters, D.L.; Porter, T.M.; Shokralla, S.; Wright, M.T.G.; Hajibabaei, M.; Baird, D.J. DNA metabarcoding reveals metacommunity dynamics in a threatened boreal wetland wilderness. PNAS 2020, 117, 8539–8545. [Google Scholar] [CrossRef] [Green Version]
- PAD-PG. Peace-Athabasca Delta Project Group Technical Report: A Report on Low Water Levels in Lake Athabasca and their Effect on the Peace-Athabasca Delta; Governments of Canada: Alberta, SK, Cadada, 1973; p. 176.
- Peters, D.L.; Buttle, J.M. The effects of flow regulation and climatic variability on obstructed drainage and reverse flow contribution in a Northern river-lake-Delta complex, Mackenzie basin headwaters. River Res. Appl. 2010, 26, 1065–1089. [Google Scholar] [CrossRef]
- Peters, D.L.; Prowse, T.D. Regulation effects on the lower Peace River, Canada. Hydrol. Process. 2001, 15, 3181–3194. [Google Scholar] [CrossRef]
- Peters, D.L.; Prowse, T.D. Generation of streamflow to seasonal high waters in a freshwater delta, northwestern Canada. Hydrol. Process. 2006, 20, 4173–4196. [Google Scholar] [CrossRef]
- Peters, D.L.; Prowse, T.D.; Pietroniro, A.; Leconte, R. Flood hydrology of the Peace-Athabasca Delta, northern Canada. Hydrol. Process. 2006, 20, 4073–4096. [Google Scholar] [CrossRef]
- Peters, D.L.; Prowse, T.D.; Marsh, P.; Lafleur, P.M.; Buttle, J.M. Persistence of Water within Perched Basins of the Peace-Athabasca Delta, Northern Canada. Wetl. Ecol. Manag. 2006, 14, 221–243. [Google Scholar] [CrossRef]
- Peters, D.L.; Atkinson, D.; Monk, W.A.; Tenenbaum, D.E.; Baird, D.J. A multi-scale hydroclimatic analysis of runoff generation in the Athabasca River, western Canada. Hydrol. Process. 2013, 27, 1915–1934. [Google Scholar] [CrossRef]
- Alexander, A.C.; Chambers, P.A. Assessment of seven Canadian rivers in relation to stages in oil sands industrial development, 1972–2010. Environ. Rev. 2016, 24, 484–494. [Google Scholar] [CrossRef] [Green Version]
- Jaques, D.R. Topographic Mapping and Drying Trends in the Peace-Athabasca Delta, Alberta Using LANDSAT MSS Imagery; Report Prepared by Ecostat Geobotanical Surveys Inc. for Wood Buffalo National Park; Parks Canada: Fort Smith, NT, Canada, 1989. [Google Scholar]
- Peters, D.L. Multi-Scale Hydroclimatic Controls on the Duration of Water in Perched Wetlands of a Cold Regions Delta, Northwestern Canada; Environment Canada: Saskatoon, SK, Canada, 2013; p. 43. [Google Scholar]
- Sharitz, R.R.; Pennings, S.C. Development of wetland plant communities. In Ecology of Freshwater and Estuarine Wetlands; Baltzer, D.P., Sharitz, R.R., Eds.; University of California Press: Berkeley, CA, USA, 2007; pp. 177–241. [Google Scholar]
- Timoney, K. Landscape cover change in the Peace-Athabasca Delta, 1927–2001. Wetlands 2006, 26, 765–778. [Google Scholar] [CrossRef]
- Wickware, G.M. Wetland classification and environmental monitoring in the Peace-Athabasca Delta using Landsat digital data. Ph.D. Thesis, McMaster University, Windsor, ON, Canada, 1979. [Google Scholar]
- Wickware, G.M.; Howarth, P.J. Change detection in the Peace—Athabasca delta using digital Landsat data. Remote Sens. Environ. 1981, 11, 9–25. [Google Scholar] [CrossRef]
- Timoney, K. A dyin delta? A case study of a wetland paradigm. Wetlands 2002, 22, 282. [Google Scholar] [CrossRef]
- Timoney, K. Factors influencing wetland plant communities during a flood-drawdown cycle in the Peace-Athabasca Delta, Northern Alberta, Canada. Wetlands 2008, 28, 450–463. [Google Scholar] [CrossRef]
- Timoney, K.P.; Argus, G. Willows, water regime, and recent cover change in the Peace—Athabasca Delta. Écoscience 2006, 13, 308–317. [Google Scholar] [CrossRef]
- Natural Resources Canada High-Resolution Digital Elevation Model Generated from LiDAR—New Data. Available online: https://www.nrcan.gc.ca/science-and-data/science-and-research/earth-sciences/geography/topographic-information/whats-new/high-resolution-digital-elevation-model-hrdem-generated-lidar-new-data-available/22350 (accessed on 15 September 2020).
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.W.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The spectral image processing system (SIPS)—Interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology/Un modèle à base physique de zone d’appel variable de l’hydrologie du bassin versant. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Lang, M.; McCarty, G.; Oesterling, R.; Yeo, I.-Y. Topographic Metrics for Improved Mapping of Forested Wetlands. Wetlands 2013, 33, 141–155. [Google Scholar] [CrossRef]
- Parker, G.G.; Russ, M.E. The canopy surface and stand development: Assessing forest canopy structure and complexity with near-surface altimetry. For. Ecol. Manag. 2004, 189, 307–315. [Google Scholar] [CrossRef]
- Hall, S.A.; Burke, I.C.; Box, D.O.; Kaufmann, M.R.; Stoker, J.M. Estimating stand structure using discrete-return lidar: An example from low density, fire prone ponderosa pine forests. For. Ecol. Manag. 2005, 208, 189–209. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Hosking, J.R.M. L-Moments: Analysis and Estimation of Distributions Using Linear Combinations of Order Statistics. J. R. Stat. Soc. Ser. B (Methodol.) 1990, 52, 105–124. [Google Scholar] [CrossRef]
- Vogel, R.M.; Fennessey, N.M. L moment diagrams should replace product moment diagrams. Water Resour. Res. 1993, 29, 1745–1752. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Jaques, D.R. Vegetation habitat types of the Peace-Athabasca Delta, 1976–1989; Report Prepared by Ecostat Geobotanical Surveys Inc. for Wood Buffalo National Park; Parks Canada: Fort Smith, NT, Canada, 1990; p. 46. [Google Scholar]
- Cohen, J. Weighted kappa: Nominal scale agreement provision for scaled disagreement or partial credit. Psychol. Bull. 1968, 70, 213–220. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band # | Band Centre (nm) | Band Width (nm) | Spatial Resolution (m) | Purpose |
|---|---|---|---|---|
| 1 | 443 | 21 | 60 | Coastal aerosols |
| 2 | 492 | 66 | 10 | Blue |
| 3 | 560 | 36 | 10 | Green |
| 4 | 665 | 31 | 10 | Red |
| 5 | 704 | 15 | 20 | Red edge |
| 6 | 740 | 15 | 20 | Red edge |
| 7 | 783 | 20 | 20 | Red edge |
| 8 | 842 | 106 | 10 | NIR |
| 8a | 865 | 21 | 20 | Narrow NIR |
| 9 | 945 | 20 | 60 | Water vapour |
| 10 | 1380 | 30 | 60 | Shortwave IR-Cloud |
| 11 | 1910 | 90 | 20 | SWIR |
| 12 | 2190 | 180 | 20 | SWIR |
| Photointerpreted (Truth) | |||||
|---|---|---|---|---|---|
| Grass/Emergent | Deciduous | Coniferous | Total (Users Accuracy) | ||
| Spectral Angle Mapper (SAM) | Grass/Emergent | 174 | 4 | 14 | 192 (0.91) |
| Deciduous | 19 | 65 | 17 | 101 (0.64) | |
| Coniferous | 8 | 8 | 83 | 99 (0/84) | |
| Total (Producers Accuracy) | 201 (0.86) | 77 (0.84) | 11 (0.73) | 392 (0.82) | |
| Spectral Angle Mapper (SAM) | ||||||
|---|---|---|---|---|---|---|
| Deciduous | Coniferous | Grass/Emergent | Water | Total (Users Accuracy) | ||
| Spectral Mixture Analysis (SMA) | Deciduous | 200 | 16 | 13 | 3 | 232 (0.86) |
| Coniferous | 23 | 84 | 3 | 0 | 110 (0.76) | |
| Grass/Emergent | 91 | 5 | 90 | 0 | 186 (0.40) | |
| Water | 0 | 0 | 3 | 43 | 46 (0.93) | |
| Total (Producers Accuracy) | 314 (0.64) | 105 (0.80) | 109 (0.83) | 46 (0.93) | 1252 (0.73) | |
| Cluster | Cluster | H | p | Adjusted p | Significance |
|---|---|---|---|---|---|
| 1 | 2 | 3.52 | 4.27e−4 | 4.27e−3 | |
| 1 | 4 | −1.61 | 1.07e−1 | 1.00e+0 | |
| 1 | 6 | 9.61 | 7.1e−22 | 7.1e−21 | |
| 1 | 7 | −5.07 | 4.04e−7 | 4.04e−6 | |
| 2 | 4 | −8.06 | 7.63e−16 | 7.63e−15 | |
| 2 | 6 | 8.60 | 7.84e−18 | 7.84e−17 | |
| 2 | 7 | −14.5 | 1.02e−47 | 1.02e−46 | |
| 4 | 6 | 13.6 | 3.48e−42 | 3.48e−41 | |
| 4 | 7 | −5.63 | 1.77e−8 | 1.77e−7 | |
| 6 | 7 | −17.4 | 7.46e−68 | 7.46e−67 | |
| Differences are significant | Differences are not significant | ||||
| (a) Rugosity | |||||
| Cluster | Cluster | H | p | Adjusted p | Significance |
| 1 | 2 | −2.71 | 6.74e−3 | 6.74e−2 | |
| 1 | 4 | 3.37 | 7.57e−4 | 7.57e−03 | |
| 1 | 6 | −5.89 | 3.82e−9 | 3.82e−08 | |
| 1 | 7 | 3.73 | 1.93e−4 | 1.93e−03 | |
| 2 | 4 | 9.54 | 1.37e−21 | 1.37e−02 | |
| 2 | 6 | −4.73 | 2.20e−6 | 2.20e−05 | |
| 2 | 7 | 10.9 | 1.42e−27 | 1.42e−02 | |
| 4 | 6 | −10.7 | 1.38e−26 | 1.38e−02 | |
| 4 | 7 | 0.393 | 6.95e−1 | 1.00e+0 | |
| 6 | 7 | 11.3 | 1.7e−29 | 1.7e−02 | |
| Differences are significant | Differences are not significant | ||||
| (b) Gap | |||||
| Cluster | Cluster | H | p | Adjusted p | Significance |
| 1 | 2 | 4.20 | 2.67e−5 | 2.67e−4 | |
| 1 | 4 | −1.26 | 2.07e−1 | 1.00e+0 | |
| 1 | 6 | 9.84 | 7.71e−23 | 7.71e−22 | |
| 1 | 7 | −4.51 | 6.55e−6 | 6.55e−5 | |
| 2 | 4 | −8.58 | 9.83e−18 | 9.83e−17 | |
| 2 | 6 | 8.22 | 2e−16 | 2e−15 | |
| 2 | 7 | −14.7 | 3.13e−49 | 3.13e−48 | |
| 4 | 6 | 13.6 | 7.67e−42 | 7.67e−41 | |
| 4 | 7 | −5.30 | 1.13e−7 | 1.13e−6 | |
| 6 | 7 | −17.2 | 6.06e−66 | 6.06e−65 | |
| 6 | 7 | −17.2 | 6.06e−66 | 6.06e−65 | |
| Differences are significant | Differences are not significant | ||||
| (c) H85 | |||||
| Cluster | Cluster | H | p | Adjusted p | Significance |
| 1 | 2 | −6.69 | 2.22e−11 | 2.22e−10 | |
| 1 | 4 | −2.62 | 8.87e−3 | 8.87e−2 | |
| 1 | 6 | 0.465 | 6.42e−1 | 1.00e+0 | |
| 1 | 7 | −1.35 | 1.78e−1 | 1.00e+0 | |
| 2 | 4 | 6.39 | 1.69e−10 | 1.69e−9 | |
| 2 | 6 | 7.13 | 1e−12 | 1e−11 | |
| 2 | 7 | 9.29 | 1.5e−20 | 1.5e−19 | |
| 4 | 6 | 3.14 | 1.67e−3 | 1.67e−2 | |
| 4 | 7 | 2.27 | 2.35e−2 | 2.35e−1 | |
| 6 | 7 | −1.92 | 5.51e−2 | 5.51e−1 | |
| Differences are significant | Differences are not significant | ||||
| (d) Skewness | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peters, D.L.; Niemann, K.O.; Skelly, R. Remote Sensing of Ecosystem Structure: Fusing Passive and Active Remotely Sensed Data to Characterize a Deltaic Wetland Landscape. Remote Sens. 2020, 12, 3819. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12223819
Peters DL, Niemann KO, Skelly R. Remote Sensing of Ecosystem Structure: Fusing Passive and Active Remotely Sensed Data to Characterize a Deltaic Wetland Landscape. Remote Sensing. 2020; 12(22):3819. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12223819
Chicago/Turabian StylePeters, Daniel L., K. Olaf Niemann, and Robert Skelly. 2020. "Remote Sensing of Ecosystem Structure: Fusing Passive and Active Remotely Sensed Data to Characterize a Deltaic Wetland Landscape" Remote Sensing 12, no. 22: 3819. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12223819