Enhanced Delaunay Triangulation Sea Ice Tracking Algorithm with Combining Feature Tracking and Pattern Matching


Abstract
:
1. Introduction
2. Study Area and Data
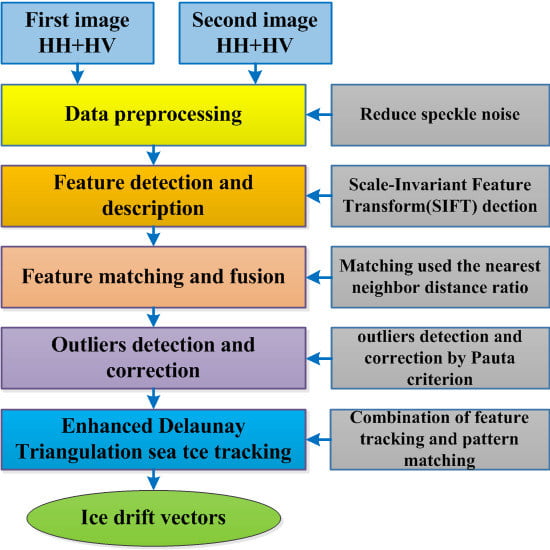
3. Methods
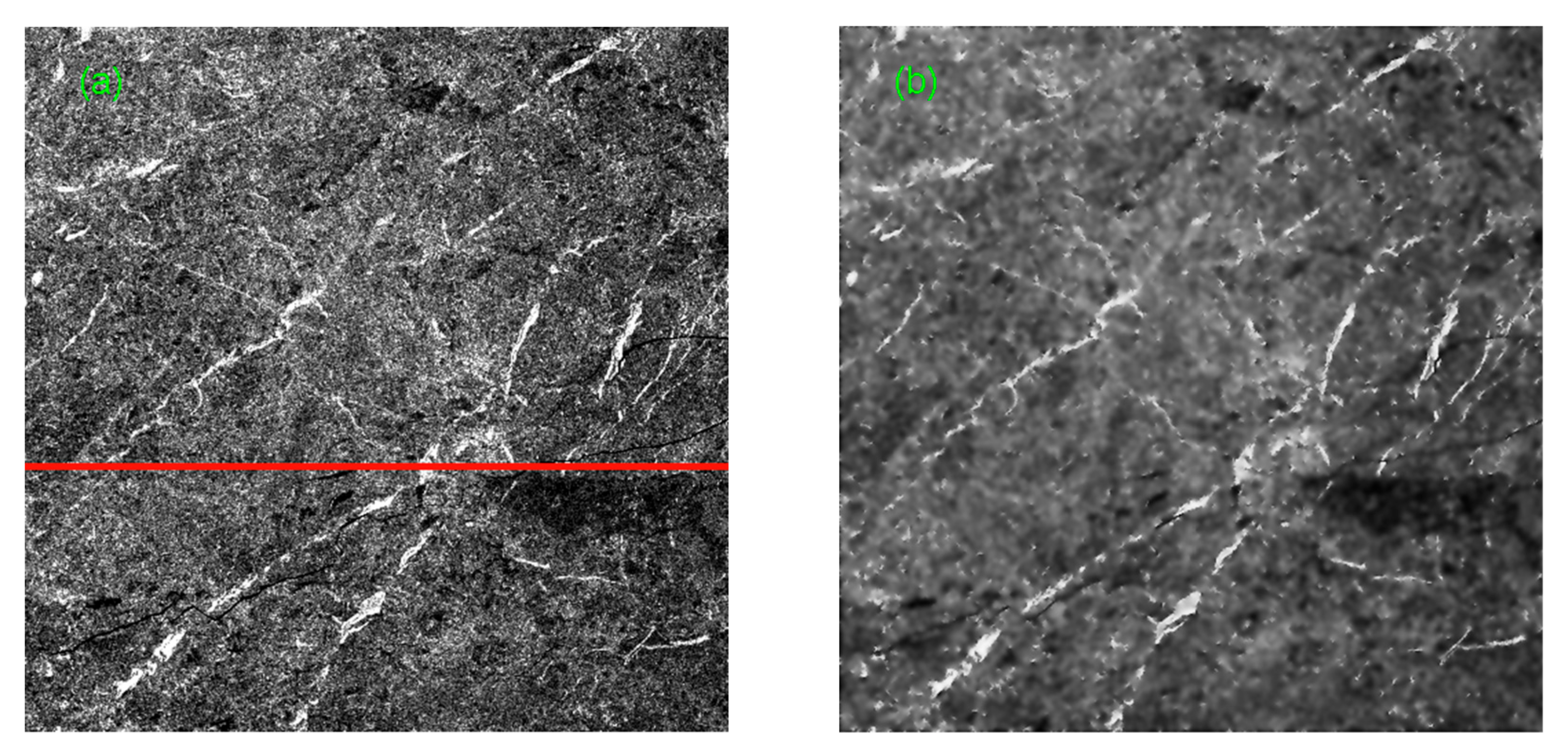
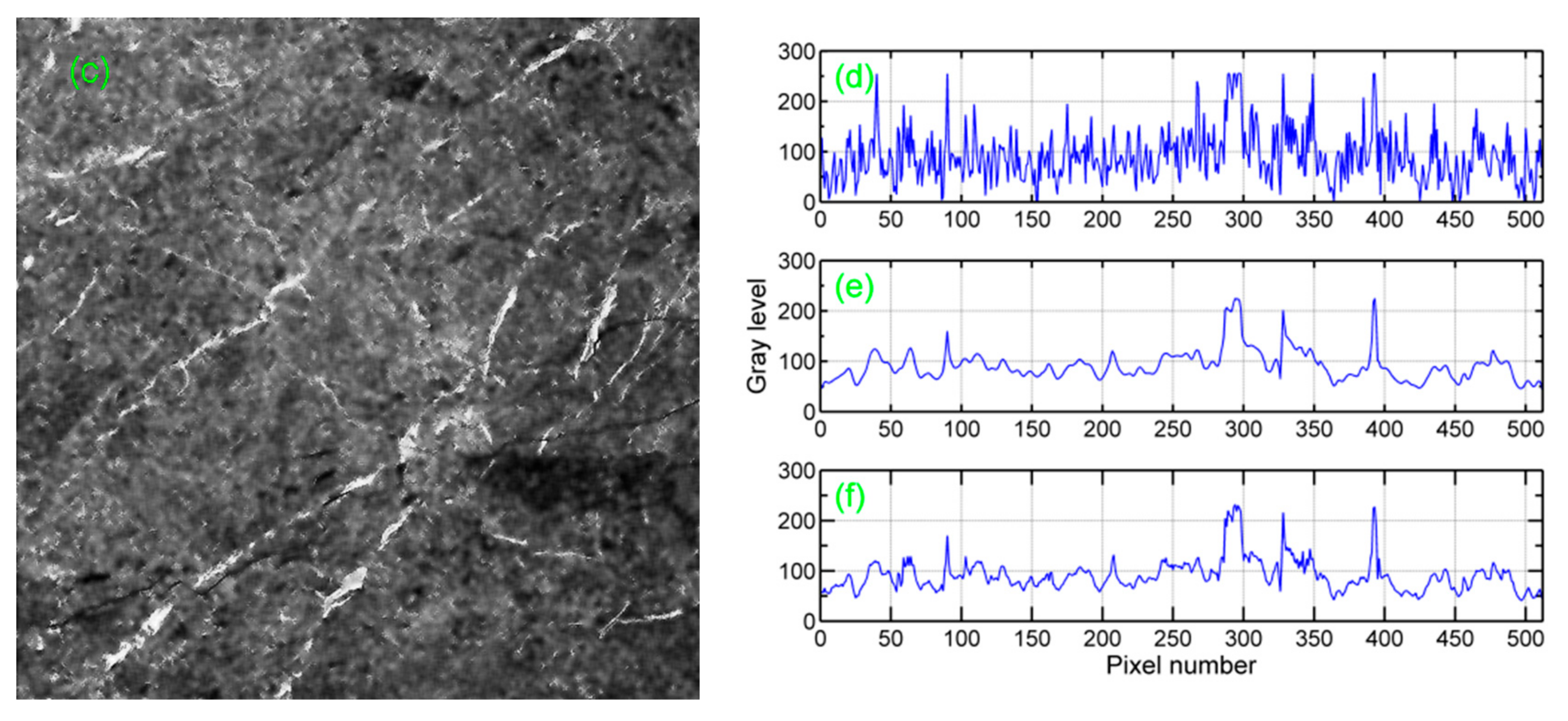
3.1. Data Preprocessing
3.2. Feature Detection and Description
3.3. Feature Matching and Fusion
3.4. Outliers Detection and Correction
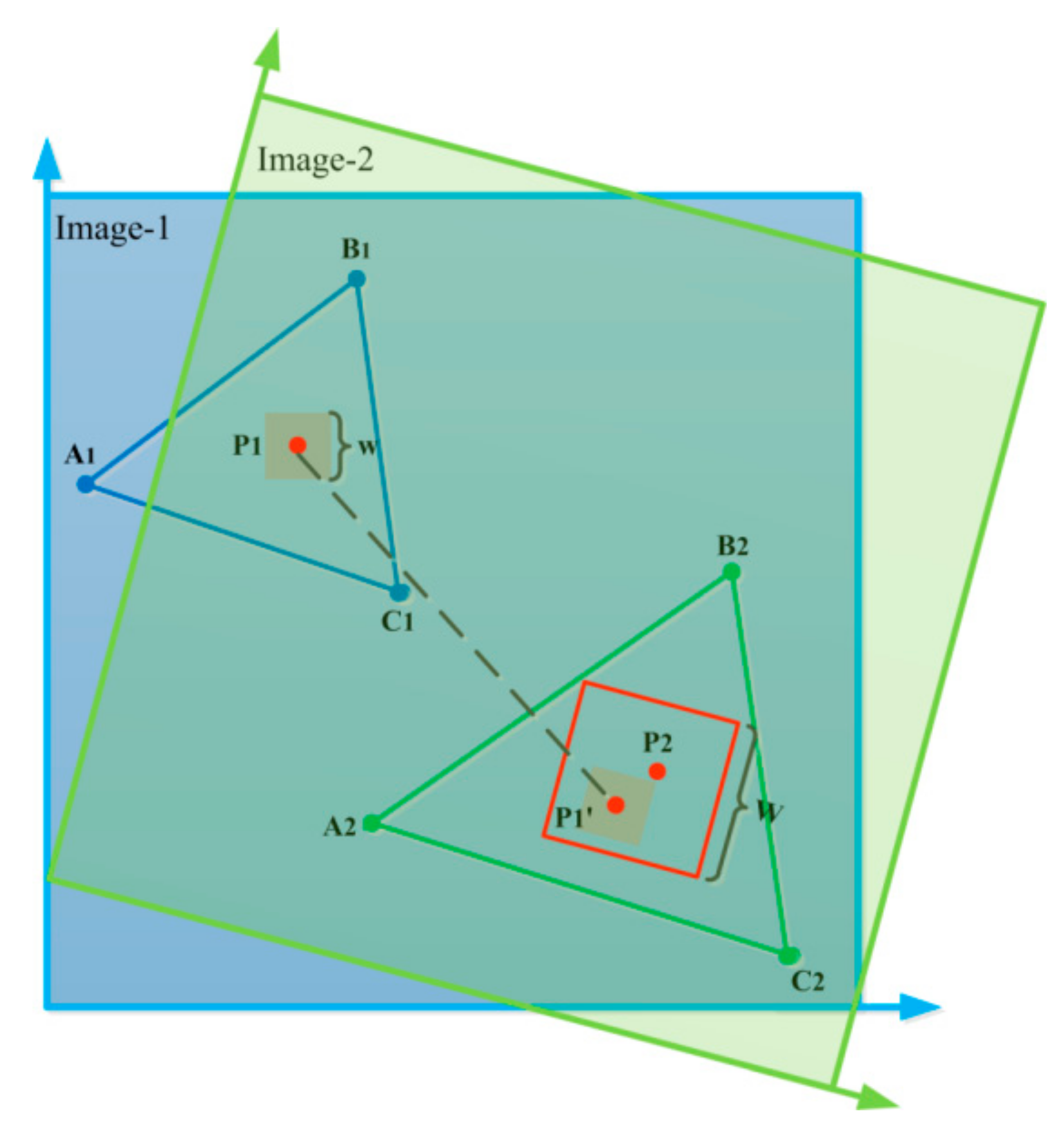
3.5. Enhanced Delaunay Triangulation Sea Ice Tracking Algorithm
4. Experimental Results and Discussion
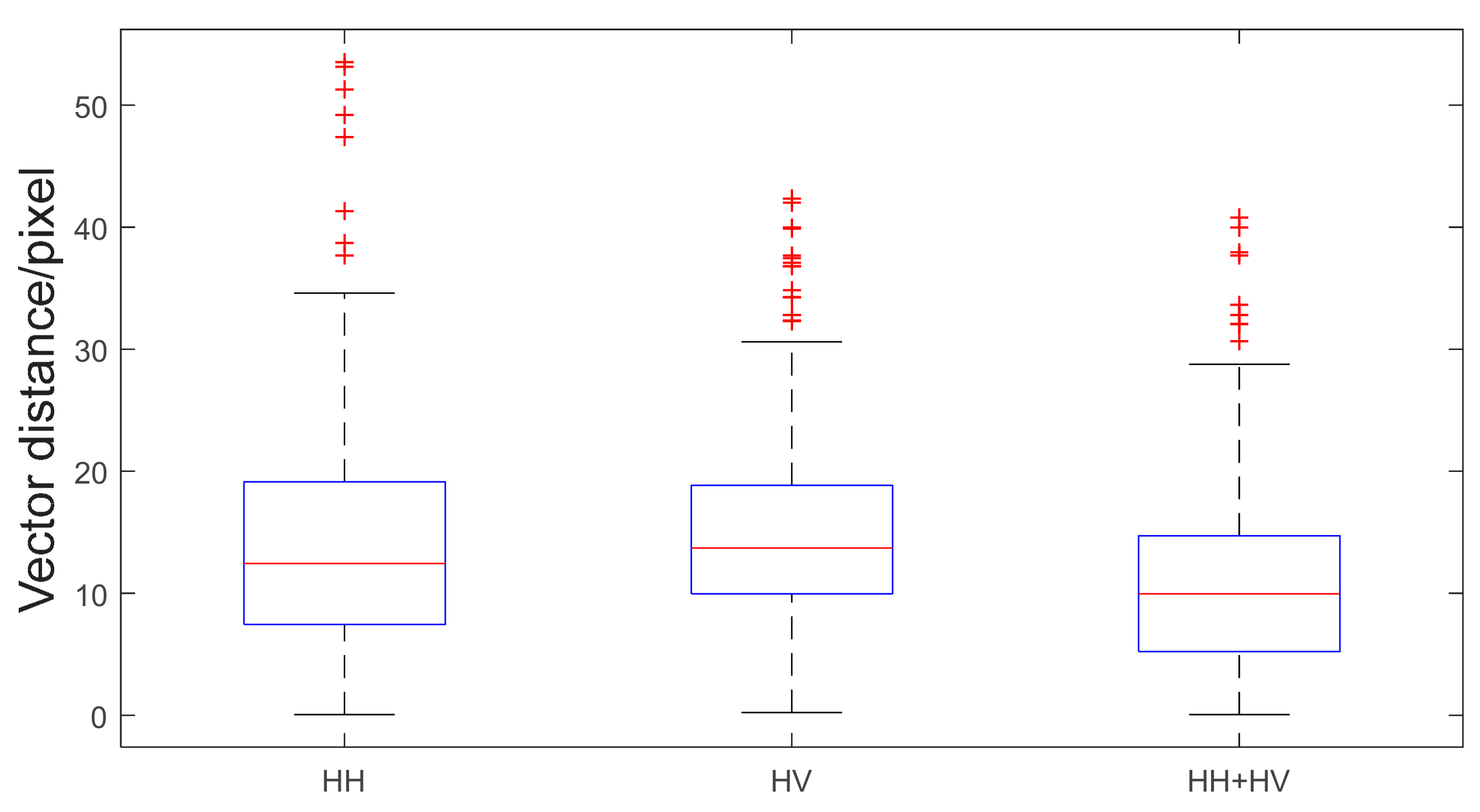
4.1. Compared the Performance of Feature Extraction
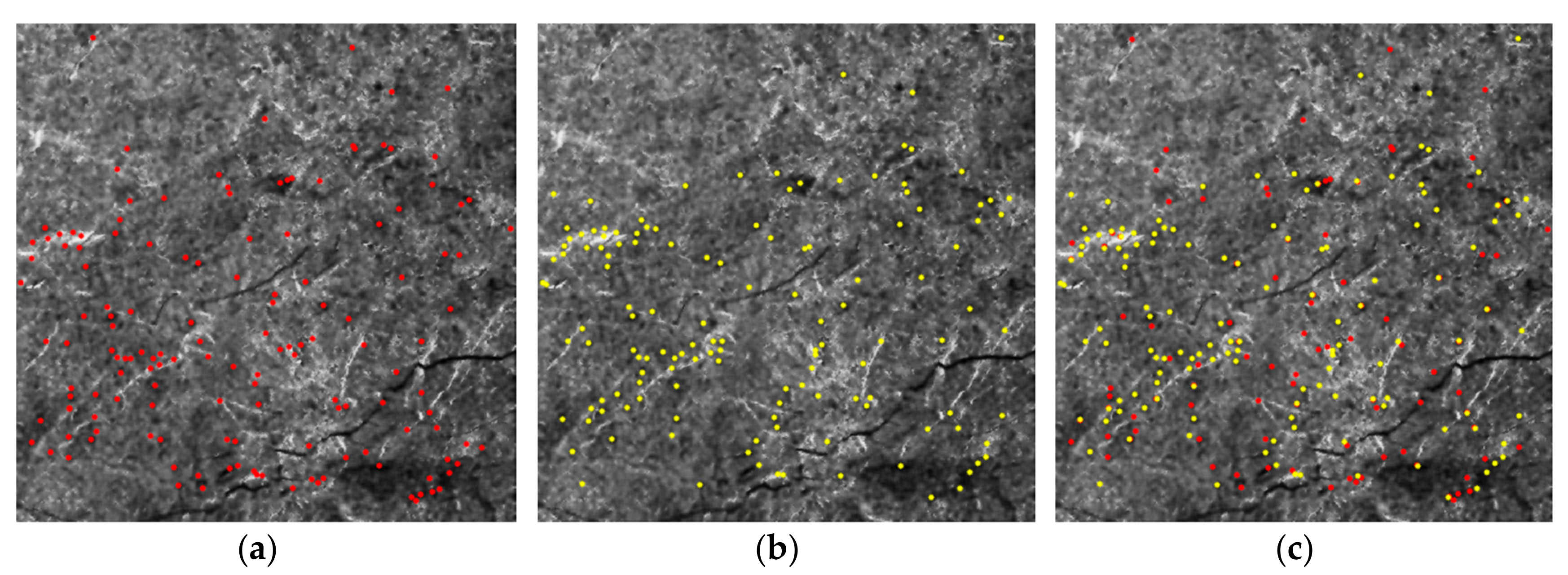
4.2. Compared the Performance of the Outliers Removing
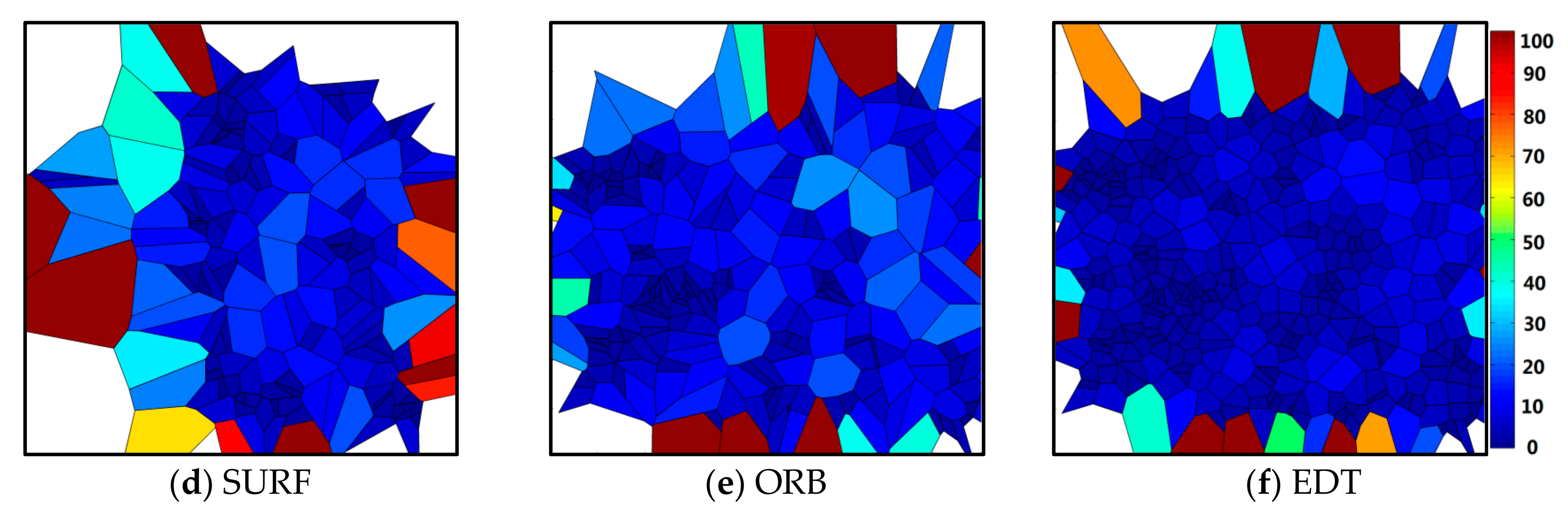
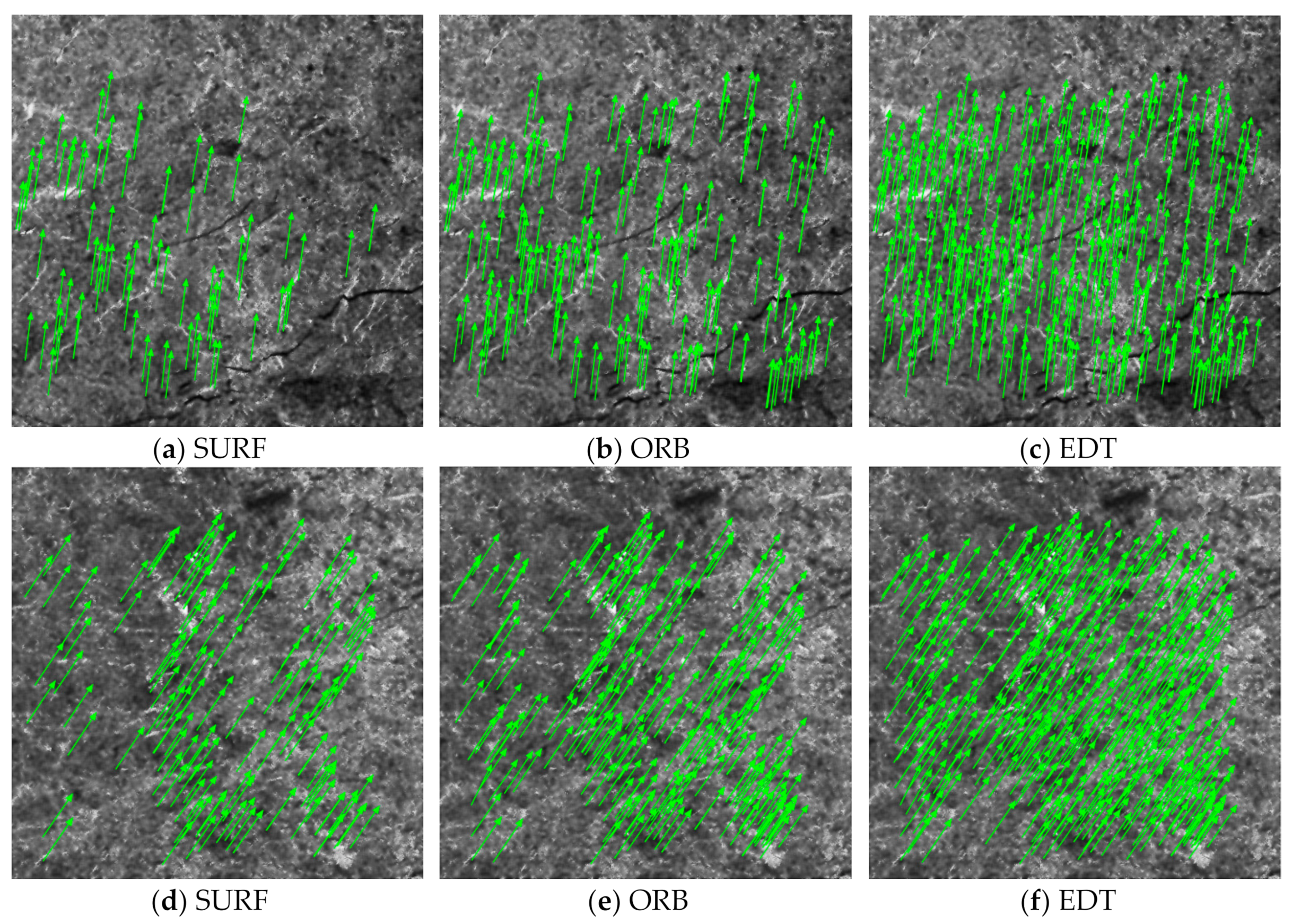
4.3. Comparison with SURF and ORB Method
4.4. Comparison with Adjacent Buoys
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Darby, D.A.; Ortiz, J.D.; Grosch, C.E.; Lund, S.P. 1500-year cycle in the arctic oscillation identified in holocene arctic sea-ice drift. Nat. Geosci. 2012, 5, 897–900. [Google Scholar] [CrossRef]
- Girard-Ardhuin, F.; Ezraty, R. Enhanced arctic sea ice drift estimation merging radiometer and scatterometer data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2639–2648. [Google Scholar] [CrossRef] [Green Version]
- Meier, W.N.; Dai, M. High-resolution sea-ice motions from amsr-e imagery. Ann. Glaciol. 2006, 44, 352–356. [Google Scholar] [CrossRef] [Green Version]
- Korosov, A.A.; Rampal, P. A combination of feature tracking and pattern matching with optimal parametrization for sea ice drift retrieval from sar data. Remote Sens. 2017, 9, 258. [Google Scholar] [CrossRef] [Green Version]
- Griebel, J.; Dierking, W. A method to improve high-resolution sea ice drift retrievals in the presence of deformation zones. Remote Sens. 2017, 9, 718. [Google Scholar] [CrossRef] [Green Version]
- Kræmer, T.; Johnsen, H.; Brekke, C. Emulating sentinel-1 doppler radial ice drift measurements using envisat asar data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6407–6418. [Google Scholar] [CrossRef] [Green Version]
- Barth, A.; Canter, M.; Schaeybroeck, B.V.; Vannitsem, S.; Massonnet, F.; Zunz, V.; Mathiot, P.; Alvera-Azcárate, A.; Beckers, J.M. Assimilation of sea surface temperature, sea ice concentration and sea ice drift in a model of the southern ocean. Ocean Model. 2015, 93, 22–39. [Google Scholar] [CrossRef] [Green Version]
- Ninnis, R.; Emery, W.; Collins, M. Automated extraction of pack ice motion from advanced very high resolution radiometer imagery. J. Geophys. Res. Ocean. 1986, 91, 10725–10734. [Google Scholar] [CrossRef]
- Emery, W.; Fowler, C.; Hawkins, J.; Preller, R. Fram strait satellite image-derived ice motions. J. Geophys. Res. Oceans 1991, 96, 4751–4768. [Google Scholar] [CrossRef]
- Haarpaintner, J. Arctic-wide operational sea ice drift from enhanced-resolution quikscat/seawinds scatterometry and its validation. IEEE Trans. Geosci. Remote Sens. 2005, 44, 102–107. [Google Scholar] [CrossRef]
- Kaleschke, L.; Lüpkes, C.; Vihma, T.; Haarpaintner, J.; Bochert, A.; Hartmann, J.; Heygster, G. Ssm/i sea ice remote sensing for mesoscale ocean-atmosphere interaction analysis. Can. J. Remote Sens. 2001, 27, 526–537. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, A.K.; Long, D.G. Validation of sea ice motion from quikscat with those from ssm/i and buoy. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1241–1246. [Google Scholar] [CrossRef]
- Gutiérrez, S.; Long, D.G. Optical flow and scale-space theory applied to sea-ice motion estimation in antarctica. In Proceedings of the IGARSS 2003—2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477). Toulouse, France, 21–25 July 2003; pp. 2805–2807. [Google Scholar]
- Thomas, M.; Geiger, C.A.; Kambhamettu, C. High resolution (400 m) motion characterization of sea ice using ers-1 sar imagery. Cold Reg. Sci. Technol. 2008, 52, 207–223. [Google Scholar] [CrossRef]
- Linow, S.; Hollands, T.; Dierking, W. An assessment of the reliability of sea-ice motion and deformation retrieval using sar images. Ann. Glaciol. 2015, 56, 229–234. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Yang, Y.; Liu, A.K.; Zhao, Y. Analysis of sea ice motion and deformation in the marginal ice zone of the bering sea using sar data. Int. J. Remote Sens. 2009, 30, 3603–3611. [Google Scholar] [CrossRef]
- Liu, H.; Li, X.-M.; Guo, H. The dynamic processes of sea ice on the east coast of antarctica—a case study based on spaceborne synthetic aperture radar data from terrasar-x. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 1187–1198. [Google Scholar] [CrossRef]
- Johansson, A.M.; Berg, A. Agreement and complementarity of sea ice drift products. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 9, 369–380. [Google Scholar] [CrossRef]
- Fowler, C.; Emery, W.J.; Maslanik, J. Satellite-derived evolution of arctic sea ice age: October 1978 to march 2003. IEEE Geosci. Remote Sens. Lett. 2004, 1, 71–74. [Google Scholar] [CrossRef]
- Fowler, C.; Emery, W.; Tschudi, M. Polar Pathfinder Daily 25 km Ease-Grid Sea Ice Motion Vectors, Version 2; National Snow and Ice Data Cent: Boulder, CO, USA, 2013. [Google Scholar]
- Lee, S.M.; Sohn, B.J.; Kim, S.J. Differentiating between first-year and multiyear sea ice in the arctic using microwave-retrieved ice emissivities. J. Geophys. Res. Atmos. 2017, 122, 5097–5112. [Google Scholar] [CrossRef]
- Petrou, Z.I.; Tian, Y. High-resolution sea ice motion estimation with optical flow using satellite spectroradiometer data. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1339–1350. [Google Scholar] [CrossRef]
- Gao, J.; Lythe, M. The maximum cross-correlation approach to detecting translational motions from sequential remote-sensing images. Comput. Geosci. 1996, 22, 525–534. [Google Scholar] [CrossRef]
- Berg, A.; Eriksson, L.E. Investigation of a hybrid algorithm for sea ice drift measurements using synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5023–5033. [Google Scholar] [CrossRef] [Green Version]
- Reddy, B.S.; Chatterji, B.N. An fft-based technique for translation, rotation, and scale-invariant image registration. IEEE Trans. Image Process. 1996, 5, 1266–1271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Komarov, A.S.; Barber, D.G. Sea ice motion tracking from sequential dual-polarization radarsat-2 images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 121–136. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L.V. Speeded-up robust features (surf). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Muckenhuber, S.; Korosov, A.A.; Sandven, S. Open-source feature-tracking algorithm for sea ice drift retrieval from sentinel-1 sar imagery. Cryosphere 2016, 10, 913–925. [Google Scholar] [CrossRef] [Green Version]
- Daida, J.; Samadani, R.; Vesecky, J.F. Object-oriented feature-tracking algorithms for sar image of the marginal ice zone. IEEE Trans. Geosci. Remote Sens. 1990, 28, 573–589. [Google Scholar] [CrossRef]
- Giles, A.B.; Massom, R.A.; Heil, P.; Hyland, G. Semi-automated feature-tracking of east antarctic sea ice from envisat asar imagery. Remote Sens. Environ. 2011, 115, 2267–2276. [Google Scholar] [CrossRef]
- Mcconnell, R.; Kwok, R.; Curlander, J.C.; Kober, W.; Pang, S.S. Ψ-s correlation and dynamic time warping: Two methods for tracking ice floes in sar images. IEEE Trans. Geosci. Remote Sens. 1991, 29, 1004–1012. [Google Scholar] [CrossRef] [Green Version]
- Demchev, D.; Volkov, V.; Kazakov, E.; Alcantarilla, P.F.; Sandven, S.; Khmeleva, V. Sea ice drift tracking from sequential sar images using accelerated-kaze features. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5174–5184. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, H.; Patel, V.M. Sar image despeckling using a convolutional neural network. IEEE Signal Process. Lett. 2017, 24, 1763–1767. [Google Scholar] [CrossRef] [Green Version]
- Parrilli, S.; Poderico, M.; Angelino, C.V.; Verdoliva, L. A nonlocal sar image denoising algorithm based on llmmse wavelet shrinkage. IEEE Trans. Geosci. Remote Sens. 2012, 50, 606–616. [Google Scholar] [CrossRef]
- Rebay, S. Efficient unstructured mesh generation by means of delaunay triangulation and bowyer-watson algorithm. J. Comput. Phys. 1993, 106, 125–138. [Google Scholar] [CrossRef]
- Lee, D.-T.; Lin, A.K. Generalized delaunay triangulation for planar graphs. Discret. Comput. Geom. 1986, 1, 201–217. [Google Scholar] [CrossRef] [Green Version]
- Lertrattanapanich, S.; Bose, N.K. High resolution image formation from low resolution frames using delaunay triangulation. IEEE Trans. Image Process. 2002, 11, 1427–1441. [Google Scholar] [CrossRef]
- Shen, C.; Bao, X.; Tan, J.; Liu, S.; Liu, Z. Two noise-robust axial scanning multi-image phase retrieval algorithms based on pauta criterion and smoothness constraint. Opt. Express 2017, 25, 16235–16249. [Google Scholar] [CrossRef]
- Muckenhuber, S.; Sandven, S. Open-source sea ice drift algorithm for sentinel-1 sar imagery using a combination of feature-tracking and pattern-matching. Cryosphere Discuss. 2017, 11, 1835–1850. [Google Scholar] [CrossRef] [Green Version]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1987, 24, 726–740. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. Orb: An efficient alternative to sift or surf. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Start Time | End Time | Geographic Extent | Dual Polarization |
|---|---|---|---|---|
| 1 | 2017-10-10 17:11:42 | 2017-10-12 16:55:20 | 79°01′—81°45′N 119°42′—134°25′W | HH + HV |
| 2 | 2017-10-16 16:23:34 | 2017-10-18 16:07:14 | 76°52′—78°15′N 140°49′—157°06′W | HH + HV |
| Unfiltered Feature | RANSAC | (μ − 3σ, μ + 3σ) | (μ − 2σ, μ + 2σ) | (μ − σ, μ + σ) | |
|---|---|---|---|---|---|
| Feature points | 296 | 118 | 276 | 270 | 267 |
| Bad matches | 29 | 0 | 9 | 3 | 0 |
| Error removes | - | 149 | 0 | 0 | 0 |
| Case | Buoy Speed | SURF | ORB | EDT |
|---|---|---|---|---|
| 1 | 0.299 | 0.336 | 0.325 | 0.318 |
| 2 | 0.286 | 0.328 | 0.316 | 0.298 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; An, J.; Zhang, J.; Yu, D.; Wang, J.; Lv, X. Enhanced Delaunay Triangulation Sea Ice Tracking Algorithm with Combining Feature Tracking and Pattern Matching. Remote Sens. 2020, 12, 581. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030581
Zhang M, An J, Zhang J, Yu D, Wang J, Lv X. Enhanced Delaunay Triangulation Sea Ice Tracking Algorithm with Combining Feature Tracking and Pattern Matching. Remote Sensing. 2020; 12(3):581. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030581
Chicago/Turabian StyleZhang, Ming, Jubai An, Jie Zhang, Dahua Yu, Junkai Wang, and Xiaoqi Lv. 2020. "Enhanced Delaunay Triangulation Sea Ice Tracking Algorithm with Combining Feature Tracking and Pattern Matching" Remote Sensing 12, no. 3: 581. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030581