Experimental Calibration of the Overlap Factor for the Pulsed Atmospheric Lidar by Employing a Collocated Scheimpflug Lidar


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
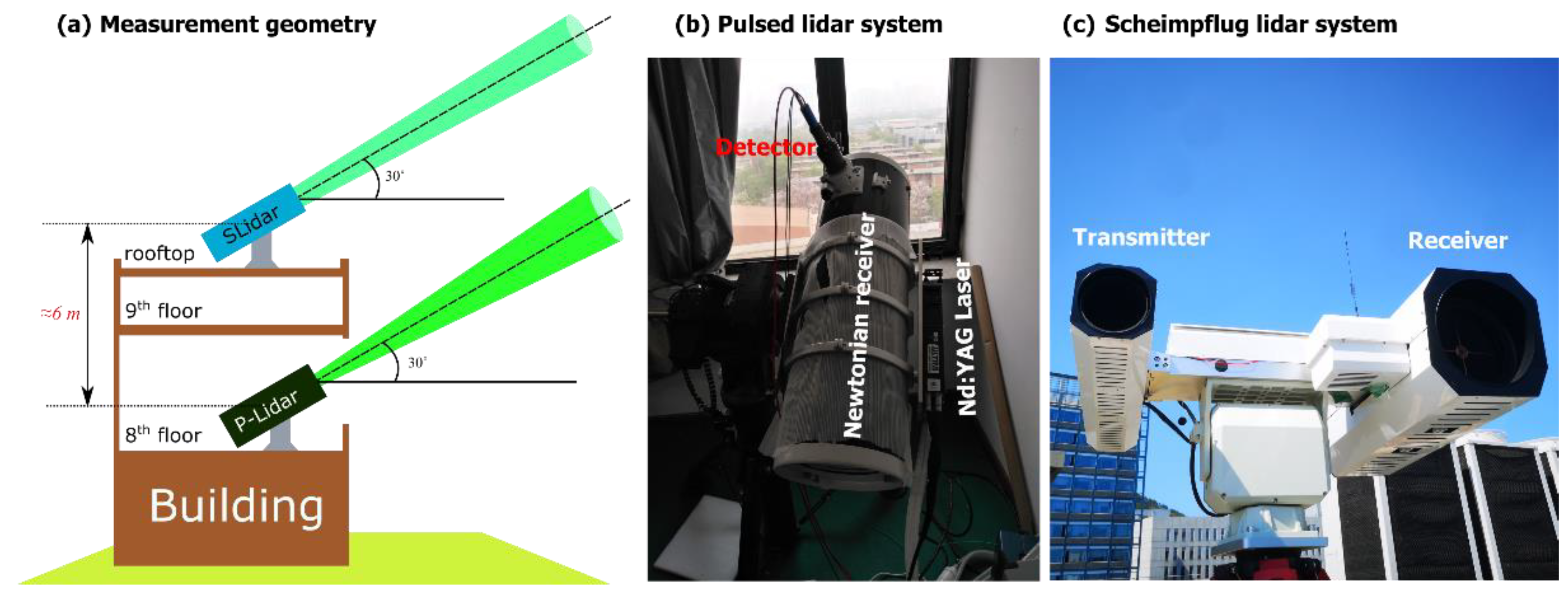
2.1. The Pulsed lidar System
2.2. The Scheimpflug Lidar System
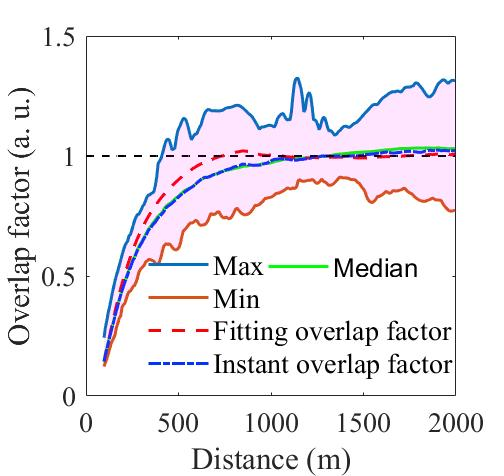
2.3. Calibration Method of the Overlap Factor
3. Results
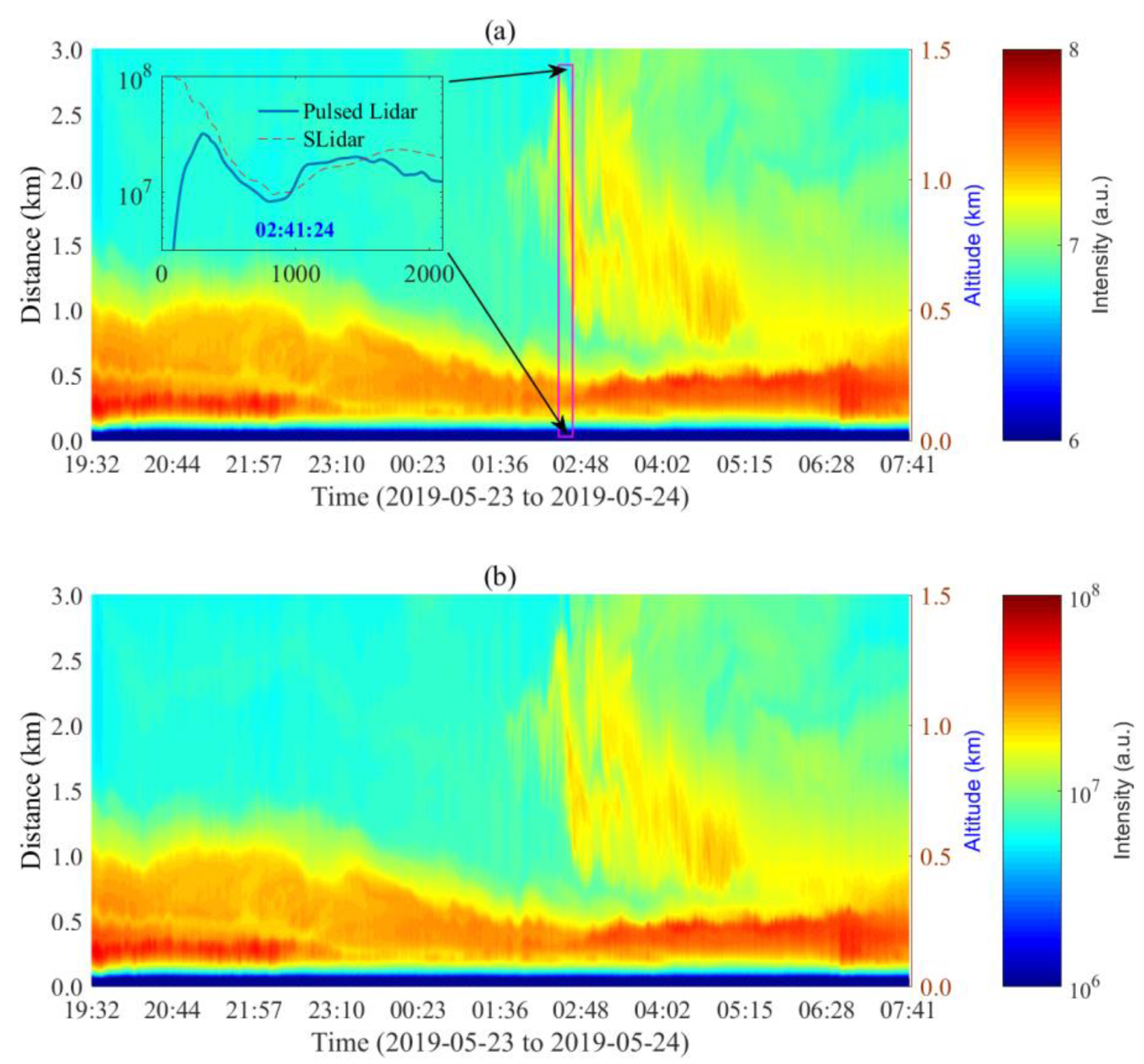
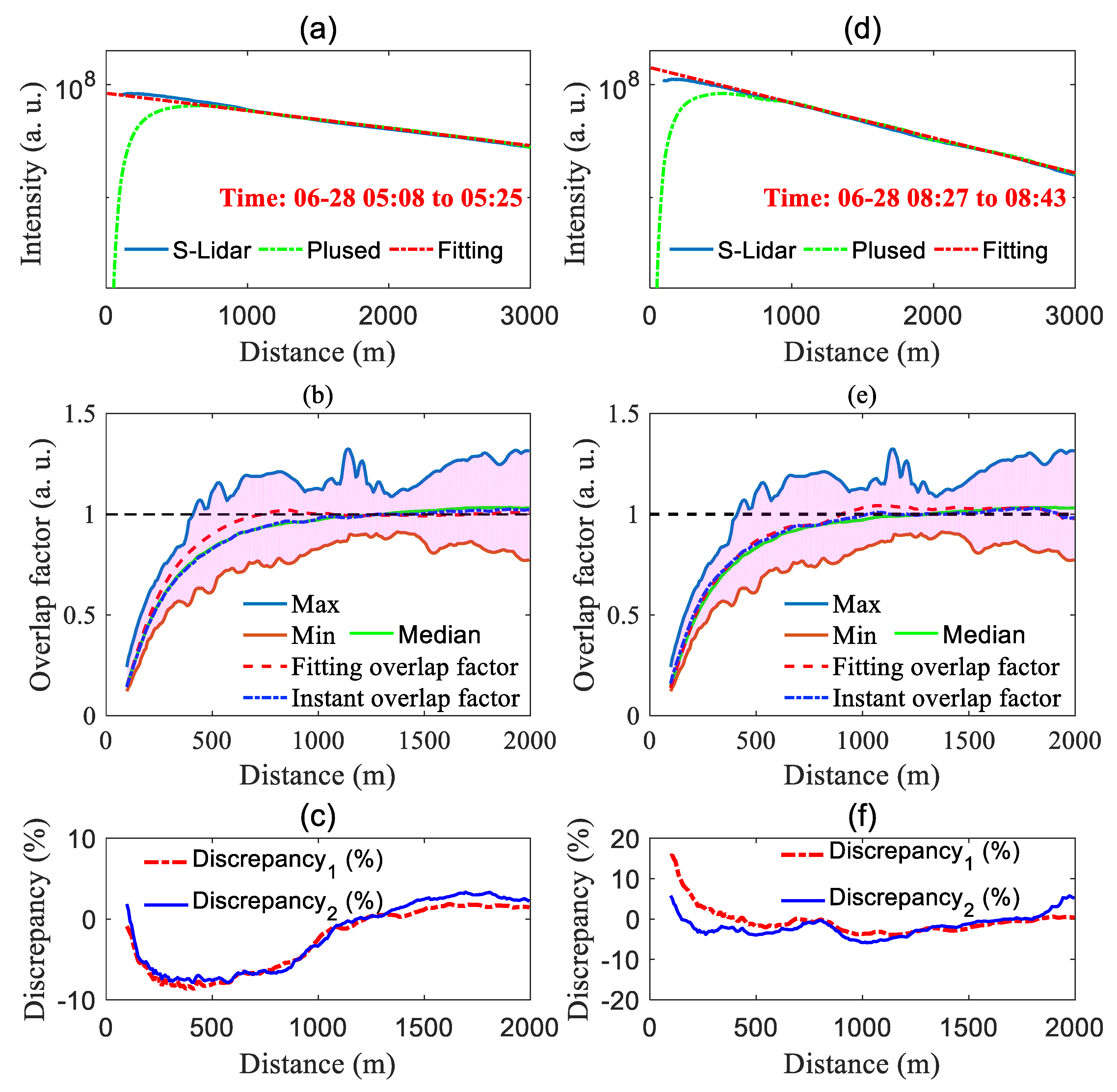
3.1. Atmospheric Slant Measurements for the Overlap Factor Calibration
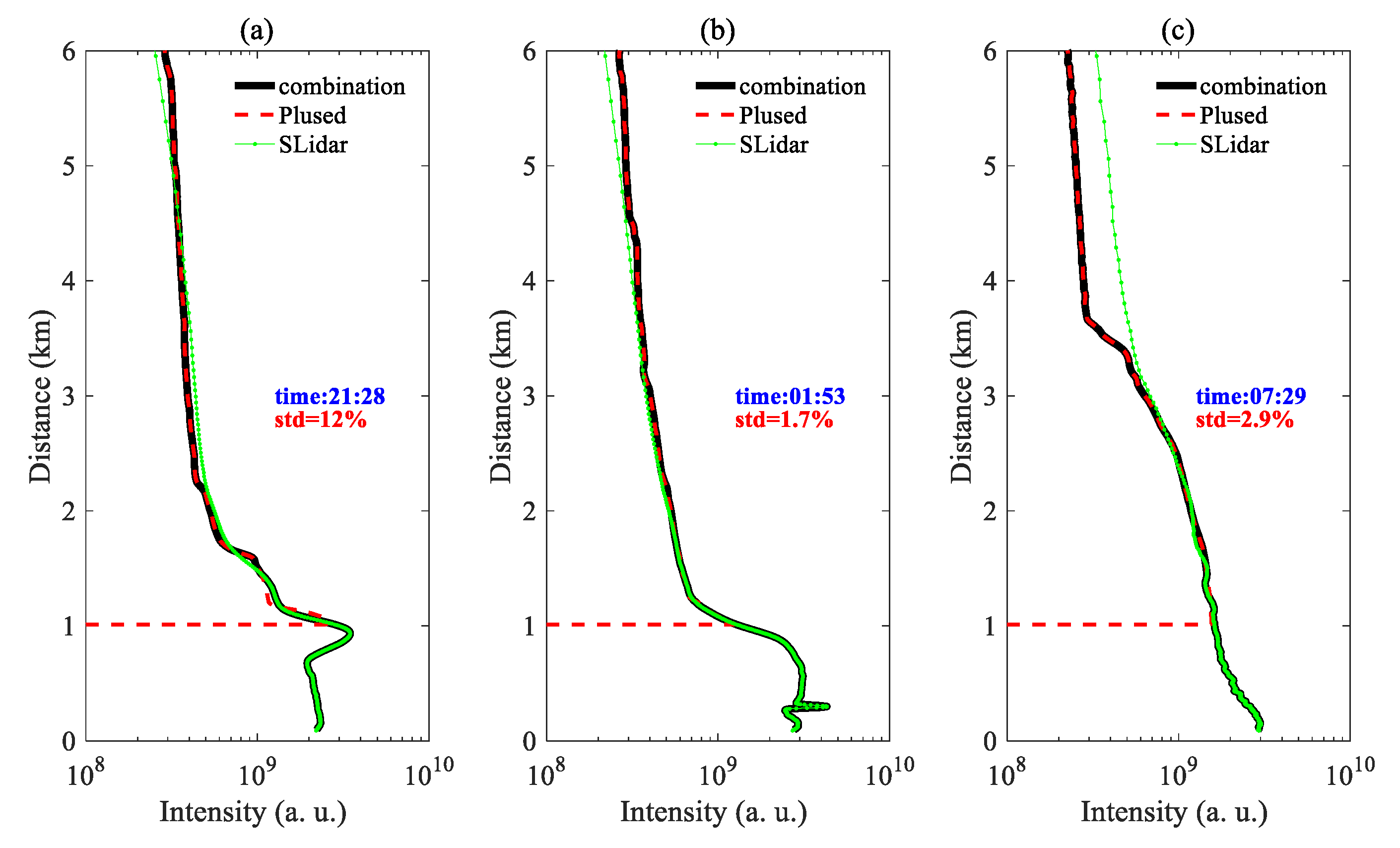
3.2. Horizontal Atmospheric Measurements under Homogeneous Atmospheric Conditions
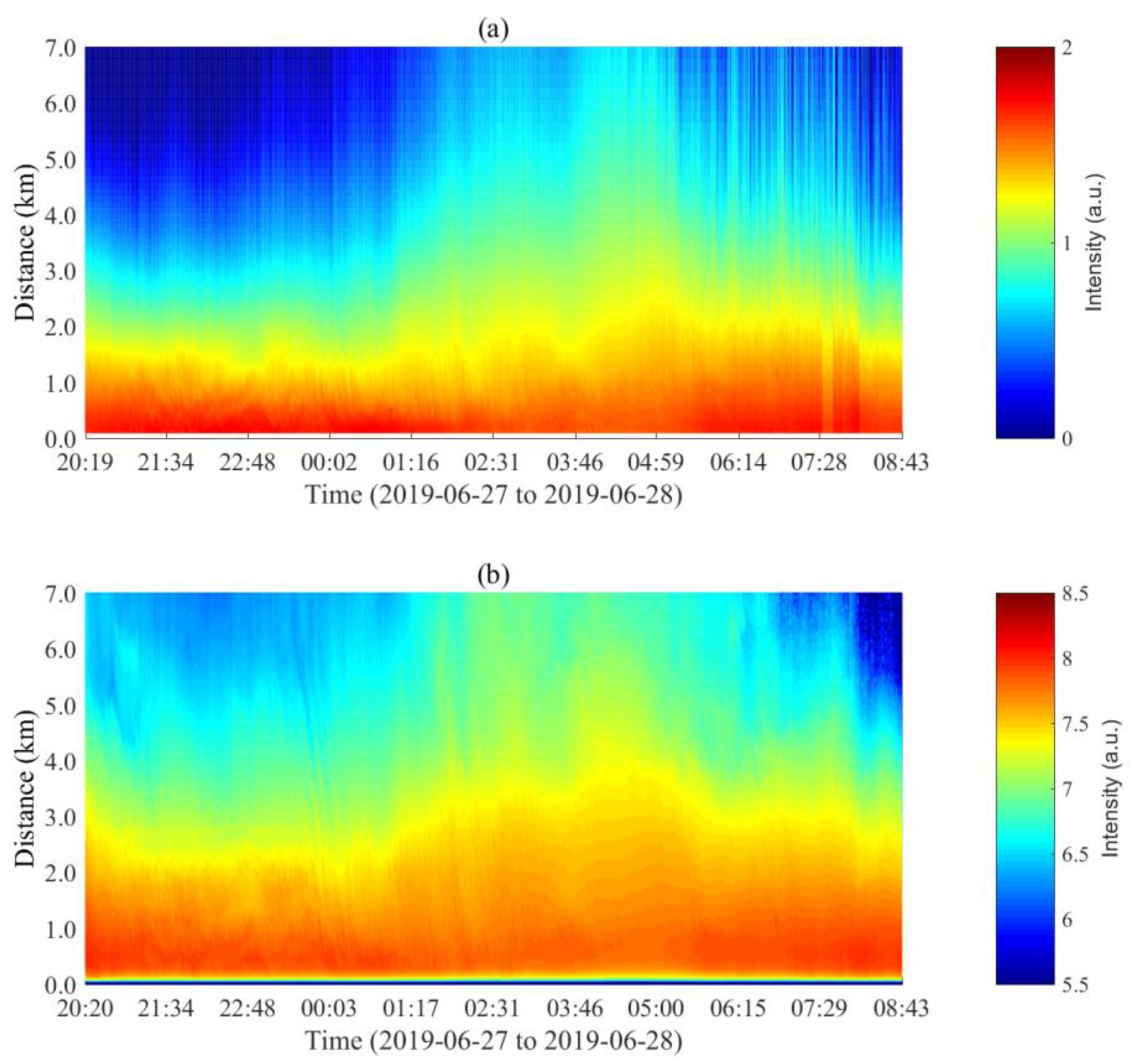
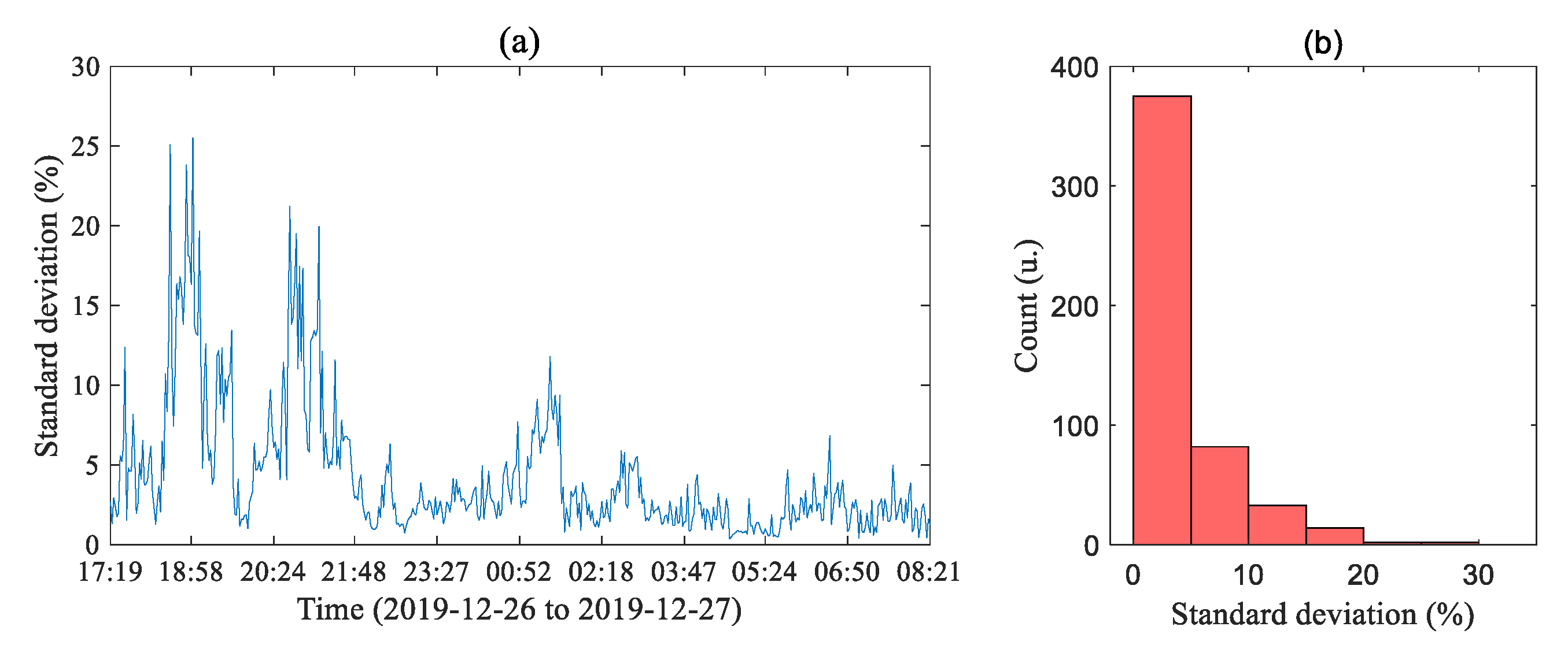
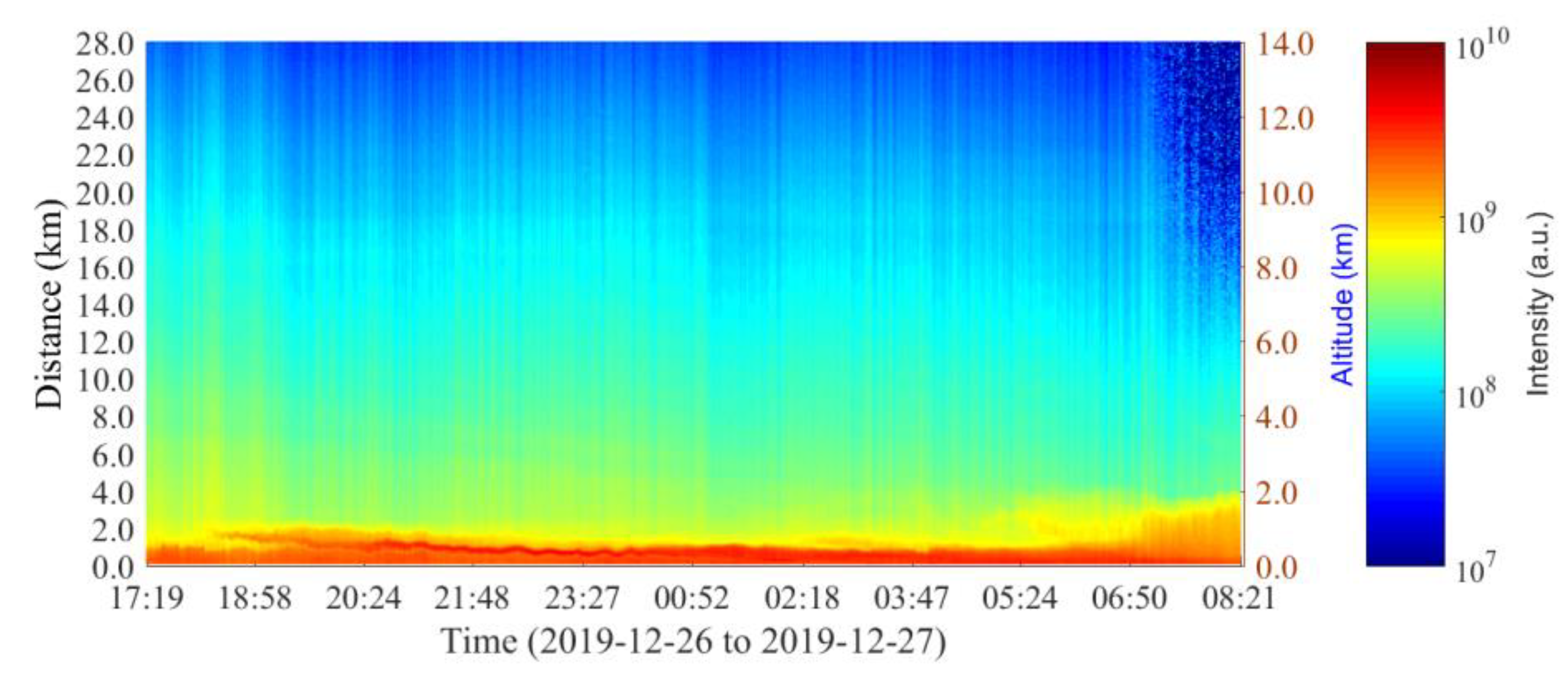
3.3. Far-Range Atmospheric Measurements
4. Discussion
4.1. Studies on the Overlap Factor
4.2. Atmospheric Remote Sensing with a Large Measurement Range
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mamouri, R.E.; Papayannis, A.; Amiridis, V.; Muller, D.; Kokkalis, P.; Rapsomanikis, S.; Karageorgos, E.T.; Tsaknakis, G.; Nenes, A.; Kazadzis, S.; et al. Multi-wavelength Raman lidar, sun photometric and aircraft measurements in combination with inversion models for the estimation of the aerosol optical and physico-chemical properties over Athens, Greece. Atmos. Meas. Tech. 2012, 5, 1793–1808. [Google Scholar] [CrossRef]
- Marchant, C.C.; Wilkerson, T.D.; Bingham, G.E.; Zavyalov, V.V.; Andersen, J.M.; Wright, C.B.; Cornelsen, S.S.; Martin, R.S.; Silva, P.J.; Hatfield, J.L. Aglite lidar: A portable elastic lidar system for investigating aerosol and wind motions at or around agricultural production facilities. J. Appl. Remote Sens. 2009, 3, 033511. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodeo, A.; Apituley, A.; Comeron, A.; Freudenthaler, V.; Linne, H.; Ansmann, A.; Bosenberg, J.; D’Amico, G.; Mattis, I.; et al. EARLINET: Towards an advanced sustainable European aerosol lidar network. Atmos. Meas. Tech. 2014, 7, 2389–2409. [Google Scholar] [CrossRef] [Green Version]
- Kulla, B.S.; Ritter, C. Water vapor calibration: Using a Raman lidar and radiosoundings to obtain highly resolved water vapor profiles. Remote Sens. 2019, 11, 616. [Google Scholar] [CrossRef] [Green Version]
- Shiina, T. LED mini lidar for atmospheric application. Sensors 2019, 19, 569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Banakh, V.A.; Smalikho, I.N. Lidar studies of wind turbulence in the stable atmospheric boundary layer. Remote Sens. 2018, 10, 1219. [Google Scholar] [CrossRef] [Green Version]
- Hildebrand, J.; Baumgarten, G.; Fiedler, J.; Lubken, F.J. Winds and temperatures of the Arctic middle atmosphere during January measured by Doppler lidar. Atmos. Chem. Phys. 2017, 17, 13345–13359. [Google Scholar] [CrossRef] [Green Version]
- Caicedo, V.; Rappengluck, B.; Lefer, B.; Morris, G.; Toledo, D.; Delgado, R. Comparison of aerosol lidar retrieval methods for boundary layer height detection using ceilometer aerosol backscatter data. Atmos. Meas. Tech. 2017, 10, 1609–1622. [Google Scholar] [CrossRef] [Green Version]
- Baars, H.; Seifert, P.; Engelmann, R.; Wandinger, U. Target categorization of aerosol and clouds by continuous multiwavelength-polarization lidar measurements. Atmos. Meas. Tech. 2017, 10, 3175–3201. [Google Scholar] [CrossRef] [Green Version]
- Parracino, S.; Richetta, M.; Gelfusa, M.; Malizia, A.; Bellecci, C.; De Leo, L.; Perrimezzi, C.; Fin, A.; Forin, M.; Giappicucci, F.; et al. Real-time vehicle emissions monitoring using a compact LiDAR system and conventional instruments: First results of an experimental campaign in a suburban area in southern Italy. Opt. Eng. 2016, 55, 103107. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Huang, J.P.; Cao, X.J.; Liu, R.J.; Zhou, B.; Wang, H.B.; Huang, Z.W.; Bi, J.R.; Zhou, T.; et al. Macrophysical and optical properties of mid-latitude cirrus clouds over a semi-arid area observed by micro-pulse lidar. J. Quant. Spectrosc. Rad. Transf. 2013, 122, 3–12. [Google Scholar] [CrossRef]
- Sakai, T.; Nagai, T.; Izumi, T.; Yoshida, S.; Shoji, Y. Automated compact mobile Raman lidar for water vapor measurement: Instrument description and validation by comparison with radiosonde, GNSS, and high-resolution objective analysis. Atmos. Meas. Tech. 2019, 12, 313–326. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.P.; Ruan, Z.; Zheng, J.F.; Gao, W.H. Comparing and merging observation data from Ka-band cloud radar, C-Band frequency-modulated continuous wave radar and Ceilometer systems. Remote Sens. 2017, 9, 1282. [Google Scholar] [CrossRef] [Green Version]
- Papayannis, A.; Chourdakis, G. The EOLE Project: A multiwavelength laser remote sensing (lidar) system for ozone and aerosol measurements in the troposphere and the lower stratosphere. Part II: Aerosol measurements over Athens, Greece. Int. J. Remote Sens. 2002, 23, 179–196. [Google Scholar] [CrossRef]
- Baars, H.; Kanitz, T.; Engelmann, R.; Althausen, D.; Heese, B.; Komppula, M.; Preissler, J.; Tesche, M.; Ansmann, A.; Wandinger, U.; et al. An overview of the first decade of Polly(NET): An emerging network of automated Raman-polarization lidars for continuous aerosol profiling. Atmos. Chem. Phys. 2016, 16, 5111–5137. [Google Scholar] [CrossRef] [Green Version]
- Sicard, M.; Molero, F.; Guerrero-Rascado, J.L.; Pedros, R.; Exposito, F.J.; Cordoba-Jabonero, C.; Bolarin, J.M.; Comeron, A.; Rocadenbosch, F.; Pujadas, M.; et al. Aerosol lidar intercomparison in the framework of SPALINET-The Spanish lidar network:methodology and results. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3547–3559. [Google Scholar] [CrossRef] [Green Version]
- Wandinger, U.; Freudenthaler, V.; Baars, H.; Amodeo, A.; Engelmann, R.; Mattis, I.; Gross, S.; Pappalardo, G.; Giunta, A.; D’Amico, G.; et al. EARLINET instrument intercomparison campaigns: Overview on strategy and results. Atmos. Meas. Tech. 2016, 9, 1001–1023. [Google Scholar] [CrossRef] [Green Version]
- Adam, M.; Turp, M.; Horseman, A.; Ordonez, C.; Buxmann, J.; Sugier, J. From operational ceilometer network to operational lidar network. EPJ Web Conf. 2016, 119, 27007. [Google Scholar] [CrossRef] [Green Version]
- Nishizawa, T.; Sugimoto, N.; Matsui, I.; Shimizu, A.; Higurashi, A.; Jin, Y. The Asian dust and aerosol lidar observation network (Ad-Net): Strategy and progress. EPJ Web Conf. 2016, 119, 19001. [Google Scholar] [CrossRef] [Green Version]
- Halldorsson, T.; Langerholc, J. Geometrical form factors for the lidar function. Appl. Opt. 1978, 17, 240–244. [Google Scholar] [CrossRef]
- Sassen, K.; Dodd, G.C. Lidar crossover function and misalignment effects. Appl. Opt. 1982, 21, 3162–3165. [Google Scholar] [CrossRef] [PubMed]
- Ancellet, G.M.; Kavaya, M.J.; Menzies, R.T.; Brothers, A.M. Lidar telescope overlap function and effects of misalignment for unstable resonator transmitter and coherent receiver. Appl. Opt. 1986, 25, 2886. [Google Scholar] [CrossRef]
- Pal, S. Monitoring depth of shallow atmospheric boundary layer to complement LiDAR measurements affected by partial overlap. Remote Sens. 2014, 6, 8468–8493. [Google Scholar] [CrossRef] [Green Version]
- Stelmaszczyk, K.; Dell’Aglio, M.; Chudzynski, S.; Stacewicz, T.; Woste, L. Analytical function for lidar geometrical compression form-factor calculations. Appl. Opt. 2005, 44, 1323–1331. [Google Scholar] [CrossRef] [PubMed]
- Berezhnyy, I. A combined diffraction and geometrical optics approach for lidar overlap function computation. Opt. Laser Eng. 2009, 47, 855–859. [Google Scholar] [CrossRef]
- Gong, W.; Mao, F.Y.; Li, J. OFLID: Simple method of overlap factor calculation with laser intensity distribution for biaxial lidar. Opt. Commun. 2011, 284, 2966–2971. [Google Scholar] [CrossRef]
- Kuze, H.; Kinjo, H.; Sakurada, Y.; Takeuchi, N. Field-of-view dependence of lidar signals by use of Newtonian and Cassegrainian telescopes. Appl. Opt. 1998, 37, 3128–3132. [Google Scholar] [CrossRef]
- Povey, A.C.; Grainger, R.G.; Peters, D.M.; Agnew, J.L.; Rees, D. Estimation of a lidar’s overlap function and its calibration by nonlinear regression. Appl. Opt. 2012, 51, 5130–5143. [Google Scholar] [CrossRef]
- Mao, F.; Gong, W.; Li, J. Geometrical form factor calculation using Monte Carlo integration for lidar. Opt. Laser Technol. 2012, 44, 907–912. [Google Scholar] [CrossRef]
- Li, J.; Li, C.C.; Zhao, Y.M.; Li, J.; Chu, Y.Q. Geometrical constraint experimental determination of Raman lidar overlap profile. Appl. Opt. 2016, 55, 4924–4928. [Google Scholar] [CrossRef]
- Sasano, Y.; Shimizu, H.; Takeuchi, N.; Okuda, M. Geometrical form-factor in the laser-radar equation—Experimental-determination. Appl. Opt. 1979, 18, 3908–3910. [Google Scholar] [CrossRef] [PubMed]
- Dho, S.W.; Park, Y.J.; Kong, H.J. Experimental determination of a geometric form factor in a lidar equation for an inhomogeneous atmosphere. Appl. Opt. 1997, 36, 6009–6010. [Google Scholar] [CrossRef] [PubMed]
- Wandinger, U.; Ansmann, A. Experimental determination of the lidar overlap profile with Raman lidar. Appl. Opt. 2002, 41, 511–514. [Google Scholar] [CrossRef]
- Hu, S.X.; Wang, X.B.; Wu, Y.H.; Li, C.; Hu, H.L. Geometrical form factor determination with Raman backscattering signals. Opt. Lett. 2005, 30, 1879–1881. [Google Scholar] [CrossRef] [PubMed]
- Hey, J.V.; Coupland, J.; Foo, M.H.; Richards, J.; Sandford, A. Determination of overlap in lidar systems. Appl. Opt. 2011, 50, 5791–5797. [Google Scholar]
- Guerrero-Rascado, J.L.; Costa, M.J.; Bortoli, D.; Silva, A.M.; Lyamani, H.; Alados-Arboledas, L. Infrared lidar overlap function: An experimental determination. Opt. Express 2010, 18, 20350–20359. [Google Scholar] [CrossRef]
- Hervo, M.; Poltera, Y.; Haefele, A. An empirical method to correct for temperature-dependent variations in the overlap function of CHM15k ceilometers. Atmos. Meas. Tech. 2016, 9, 2947–2959. [Google Scholar] [CrossRef] [Green Version]
- Tsaknakis, G.; Papayannis, A.; Kokkalis, P.; Amiridis, V.; Kambezidis, H.D.; Mamouri, R.E.; Georgoussis, G.; Avdikos, G. Inter-comparison of lidar and ceilometer retrievals for aerosol and Planetary Boundary Layer profiling over Athens, Greece. Atmos. Meas. Tech. 2011, 4, 1261–1273. [Google Scholar] [CrossRef] [Green Version]
- Meki, K.; Yamaguchi, K.; Li, X.; Saito, Y.; Kawahara, T.D.; Nomura, A. Range-resolved bistatic imaging lidar for the measurement of the lower atmosphere. Opt. Lett. 1996, 21, 1318–1320. [Google Scholar] [CrossRef]
- Barnes, J.E.; Bronner, S.; Beck, R.; Parikh, N.C. Boundary layer scattering measurements with a charge-coupled device camera lidar. Appl. Opt. 2003, 42, 2647–2652. [Google Scholar] [CrossRef]
- Tao, Z.M.; Liu, D.; Wang, Z.Z.; Ma, X.M.; Zhang, Q.Z.; Xie, C.B.; Bo, G.Y.; Hu, S.X.; Wang, Y.J. Measurements of aerosol phase function and vertical backscattering coefficient using a charge-coupled device side-scatter lidar. Opt. Express 2014, 22, 1127–1134. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mei, L.; Brydegaard, M. Atmospheric aerosol monitoring by an elastic Scheimpflug lidar system. Opt. Express 2015, 23, 247841. [Google Scholar] [CrossRef] [PubMed]
- Mei, L.; Brydegaard, M. Continuous-wave differential absorption lidar. Laser Photon. Rev. 2015, 9, 629–636. [Google Scholar] [CrossRef]
- Brydegaard, M.; Gebru, A.; Svanberg, S. Super resolution laser radar with blinking atmospheric particles—Application to interacting flying insects. PIER 2014, 147, 141–151. [Google Scholar] [CrossRef] [Green Version]
- Mei, L.; Guan, P.; Yang, Y.; Kong, Z. Atmospheric extinction coefficient retrieval and validation for the single-band Mie-scattering Scheimpflug lidar technique. Opt. Express 2017, 25, A628–A638. [Google Scholar] [CrossRef]
- Mei, L.; Guan, P. Development of an atmospheric polarization Scheimpflug lidar system based on a time-division multiplexing scheme. Opt. Lett. 2017, 42, 3562–3565. [Google Scholar] [CrossRef]
- Zhao, G.; Malmqvist, E.; Torok, S.; Bengtsson, P.E.; Svanberg, S.; Bood, J.; Brydegaard, M. Particle profiling and classification by a dual-band continuous-wave lidar system. Appl. Opt. 2018, 57, 10164–10171. [Google Scholar] [CrossRef]
- Lian, S.; Bian, Y.; Zhao, G.; Li, W.; Zhao, C. Dual CCD detection method to retrieve aerosol extinction coefficient profile. Opt. Express 2019, 27, A1529–A1543. [Google Scholar] [CrossRef]
- Liu, Z.; Li, L.; Li, H.; Mei, L. Preliminary studies on atmospheric monitoring by employing a portable unmanned Mie-scattering Scheimpflug lidar system. Remote Sens. 2019, 11, 937. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.Z.; Tao, Z.M.; Liu, D.; Wu, D.C.; Xie, C.B.; Wang, Y.J. New experimental method for lidar overlap factor using a CCD side-scatter technique. Opt. Lett. 2015, 40, 1749–1752. [Google Scholar] [CrossRef]
- Matthais, V.; Freudenthaler, V.; Amodeo, A.; Balin, I.; Balis, D.; Bosenberg, J.; Chaikovsky, A.; Chourdakis, G.; Comeron, A.; Delaval, A.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 1. Instruments. Appl. Opt. 2004, 43, 961–976. [Google Scholar] [CrossRef] [PubMed]
- Strawbridge, K.B. Developing a portable, autonomous aerosol backscatter lidar for network or remote operations. Atmos. Meas. Tech. 2013, 6, 801–816. [Google Scholar] [CrossRef] [Green Version]
- Mei, L.; Zhang, L.; Kong, Z.; Li, H. Noise modeling, evaluation and reduction for the atmospheric lidar technique employing an image sensor. Opt. Commun. 2018, 426, 463–470. [Google Scholar] [CrossRef]
- Simeonov, V.; Larcheveque, G.; Quaglia, P.; van den Bergh, H.; Calpini, B. Influence of the photomultiplier tube spatial uniformity on lidar signals. Appl. Opt. 1999, 38, 5186–5190. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, L.; Chen, L. Retrieval and analysis of aerosol lidar ratio at several typical regions in China. Chin. J. Lasers 2013, 40, 0513002. [Google Scholar] [CrossRef]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some Comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef]
- Böckmann, C.; Wandinger, U.; Ansmann, A.; Bösenberg, J.; Amiridis, V.; Boselli, A.; Delaval, A.; De Tomasi, F.; Frioud, M.; Grigorov, I.V.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 2. Aerosol backscatter algorithms. Appl. Opt. 2004, 43, 977–989. [Google Scholar] [CrossRef]
- Ebisch, K. A correction to the Douglas–Peucker line generalization algorithm. Comput. Geosci. 2002, 8, 995–997. [Google Scholar] [CrossRef]
- Kong, K.; Guan, G.; Mei, L. A green-band Scheimpflug lidar system: Feasibility studies for atmospheric remote sensing. Opt. Sens. Imaging Technol. Appl. 2018, 10846, 108460P. [Google Scholar]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, L.; Ma, T.; Zhang, Z.; Fei, R.; Liu, K.; Gong, Z.; Li, H. Experimental Calibration of the Overlap Factor for the Pulsed Atmospheric Lidar by Employing a Collocated Scheimpflug Lidar. Remote Sens. 2020, 12, 1227. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071227
Mei L, Ma T, Zhang Z, Fei R, Liu K, Gong Z, Li H. Experimental Calibration of the Overlap Factor for the Pulsed Atmospheric Lidar by Employing a Collocated Scheimpflug Lidar. Remote Sensing. 2020; 12(7):1227. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071227
Chicago/Turabian StyleMei, Liang, Teng Ma, Zhen Zhang, Ruonan Fei, Kun Liu, Zhenfeng Gong, and Hui Li. 2020. "Experimental Calibration of the Overlap Factor for the Pulsed Atmospheric Lidar by Employing a Collocated Scheimpflug Lidar" Remote Sensing 12, no. 7: 1227. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071227