Assessing the Behavioural Responses of Small Cetaceans to Unmanned Aerial Vehicles
by
 , , and
, , and
Joana Castro
1,2,* ,
,
Francisco O. Borges
2,
André Cid
1,
Marina I. Laborde
1,2,
Rui Rosa
2 and
and
Heidi C. Pearson
3 1
AIMM—Associação para a Investigação do Meio Marinho, 1500-399 Lisboa, Portugal
2
MARE—Marine and Environmental Sciences Centre, Faculdade de Ciências da Universidade de Lisboa, Campo Grande, 1749-016 Lisboa, Portugal
3
University of Alaska Southeast, Juneau, AK 99801, USA
*
Author to whom correspondence should be addressed.
Remote Sens. 2021, 13(1), 156; https://0-doi-org.brum.beds.ac.uk/10.3390/rs13010156
Submission received: 2 December 2020
/
Revised: 28 December 2020
/
Accepted: 2 January 2021
/
Published: 5 January 2021
Abstract
:Unmanned Aerial Vehicles (UAVs), or drones, have recently emerged as a relatively affordable and accessible method for studying wildlife. Vertical Take-off and Landing (VTOL) UAVs are appropriate for morphometric, behavioural, abundance and demographic studies of marine mammals, providing a stable, nonintrusive and highly manoeuvrable platform. Previous studies using VTOL UAVs have been conducted on various marine mammal species, but specific studies regarding behavioural responses to these devices are limited and scarce. The aim of this study was to evaluate the immediate behavioural responses of common (Delphinus delphis) and bottlenose (Tursiops truncatus) dolphins to a VTOL UAV flown at different altitudes. A multirotor (quadcopter) UAV with an attached GoPro camera was used. Once a dolphin group was located, the UAV was flown at a starting height of 50 m directly above the group, subsequently descending 5 m every 30 s until reaching 5 m. We assessed three behavioural responses to a VTOL UAV at different heights: (i) direction changes, (ii) swimming speed and (iii) diving. Responses by D. delphis (n = 15) and T. truncatus (n = 10) groups were analysed separately. There were no significant responses of T. truncatus to any of the studied variables. For D. delphis, however, there were statistically significant changes in direction when the UAV was flown at a height of 5 m. Our results indicate that UAVs do not induce immediate behavioural responses in common or bottlenose dolphins when flown at heights > 5 m, demonstrating that the use of VTOL UAVs to study dolphins has minimal impact on the animals. However, we advise the use of the precautionary principle when interpreting these results as characteristics of this study site (e.g., high whale-watching activity) may have habituated dolphins to anthropogenic disturbance.

1. Introduction
Unmanned Aerial Systems (UASs) have recently emerged as a relatively inexpensive and accessible method for studying wildlife [1,2,3]. These systems consist of an Unmanned Aerial Vehicle (UAV or drone), a launch and recovery system, a video camera payload mounted to the UAV and a ground control system [4]. These devices constitute an alternative to manned aerial surveys, having both improved manoeuvrability and less intrusion than manned aircraft, while also providing high-resolution video with lower risk to human life and at a potentially reduced financial cost [1,5,6,7]. Vertical Take-off and Landing (VTOL) UAVs are a category of UAS that are usually smaller and have the ability to hover in flight and take-off and land without a runway [1]. This provides a stable, nonintrusive and highly manoeuvrable platform for the detailed study of an individual or small groups of animals [1,2]. Nonetheless, in comparison to boats, manned aerial surveys and fixed-wing UASs, some limitations of VTOL UAVs include limited battery life, rarely exceeding 20 min in commercial off-the-shelf variants, and reduced payloads [1,5,6].
Notwithstanding, VTOL UAVs are an excellent platform for aerial studies of marine mammals, having been used in studies of morphometrics, behaviour, demographics and relative abundance [6,7,8,9,10,11,12]. While many of these studies have focused on pinnipeds [2,10,11], others have also focused on cetaceans including humpback whales (Megaptera novaeangliae) [13,14]; grey whales (Eschrichtius robustus) [15]; southern right whales (Eubalaena australis) [16]; blue (Balaenoptera musculus), fin (B. physalus) and sperm (Physeter macrocephalus) whales [17]; killer whales (Orcinus orca) [12]; bottlenose dolphins (Tursiops truncatus) [18]; dusky dolphins (Lagenorhynchus obscurus) [7] and finless porpoise (Neophocaena asiaeorientalis) [19].
According to Smith et al. [2], two main factors can cause disturbance to marine mammals from UAVs: acoustic and visual cues. However, research regarding behavioural responses of marine mammals to VTOL UAVs has been relatively scarce and limited to a few species [1,2,4,18,20]. Pinnipeds such as harbour seals (Phoca vitulina), spotted seals (P. largha), ribbon seals (Histriophoca fasciata) and grey seals (Halichoerus grypus) have been recorded exhibiting stress or avoidance behaviours when confronted by either visual or acoustic effects from VTOL UAVs [2,10,11]. This may be due to association with avian predators that cast a shadow of similar size to the UAVs when at certain altitudes [2].
However, visual and acoustic effects from VTOL UAVs may have little impact on cetaceans. First, VTOL UAVs have a relatively small acoustic signature [2,5,21]. For example, Christiansen et al. [3] used underwater microphones to conclude that small UAVs flown at altitudes > 10 m are virtually inaudible to both mysticetes and odontocetes at depths of 1 m in coastal areas. Unlike pinnipeds, the cetacean ear is no longer adapted for hearing in air thus potentially reducing the perceived auditory impact of UAVs on cetaceans, even at the surface [22]. Second, the relatively small size of VTOL UAVs provides a visual signature that, even if perceived at all, could potentially be discarded as nonthreatening due to the lack of cetaceans’ natural aerial predators [23]. In fact, there is anecdotal evidence for bottlenose dolphins playing with the shadow cast by one of these devices [2,20]. The few existing studies on the behavioural responses of cetaceans to UAVs indicate that some cetaceans appear to be relatively undisturbed by them [1,2]. However, restriction of these studies to cetaceans of relatively large size (> 6 m) [2] leads to limitations in the generalisability of these findings to smaller cetacean species such as bottlenose [18,20] and common (Delphinus delphis) dolphins.
The aim of the present study was to evaluate the immediate behavioural responses of common and bottlenose dolphins to a VTOL UAV. To test the null hypothesis of no response, we measured changes in direction, swimming speed and diving behaviour of dolphin groups to a VTOL UAV flown at different heights.
2. Materials and Methods
A multirotor (quadcopter) VTOL UAV (DJI Phantom 2; 35 cm diameter, 1 kg, plastic propellers, http://www.dji.com) with an attached GoPro HERO4 camera was used. A radio antenna system installed on the UAV allowed live-streaming of video during flight. The study site was located in the Algarve region in the south coast of Portugal, between Cape St. Vicente (37°1.35′N, 8°59.81′W) and Olhão (37°1.56′N, 7°50.54′W) at a maximum distance of 25 nautical miles (nm) from shore. In this region, several species of cetaceans occur year-round, posing a potential hotspot for species such as common and bottlenose dolphins [24,25]. It is also a region where both dolphin species are the focus of commercial whale-watching tours [26,27]. This study was conducted under the authorisation of the Portuguese Conservation Institute (ICNF–AOC/17/2016).
During the summer months of 2017, random surveys were conducted to locate common and bottlenose dolphin groups. Once a group was sighted, the research vessel (a 7 m RHIB with 4-stroke 135 hp outboard engine) approached at a distance of approximately 30 m, unless the animals approached the vessel more closely. In an effort to habituate the group of dolphins and minimise possible impacts of the research vessel, the group was followed for ≥ 15 min prior to launching the UAV. During sampling, the research vessel maintained a distance of 30–100 m from the group. These distances were intended to be a compromise between the capability of observing the group closely and minimising the impact of the vessel on the behaviours of the animals. The 30 m distance is also the approach limit to an individual or group of cetaceans, according to the Portuguese Law (Decreto-Lei n.º 9/2006). All sampling was conducted with no other boats present within a 1 nm radius, Beaufort Sea state of ≤ 3, swell of < 0.5 m and visibility ≥ 5 km. These sampling criteria were established to control for the effect of environmental conditions (since they can largely determine the acoustic effects of the UAV on dolphins [2]) and to ensure suitable conditions for observing the group and accurately determining changes in the variables being tested.
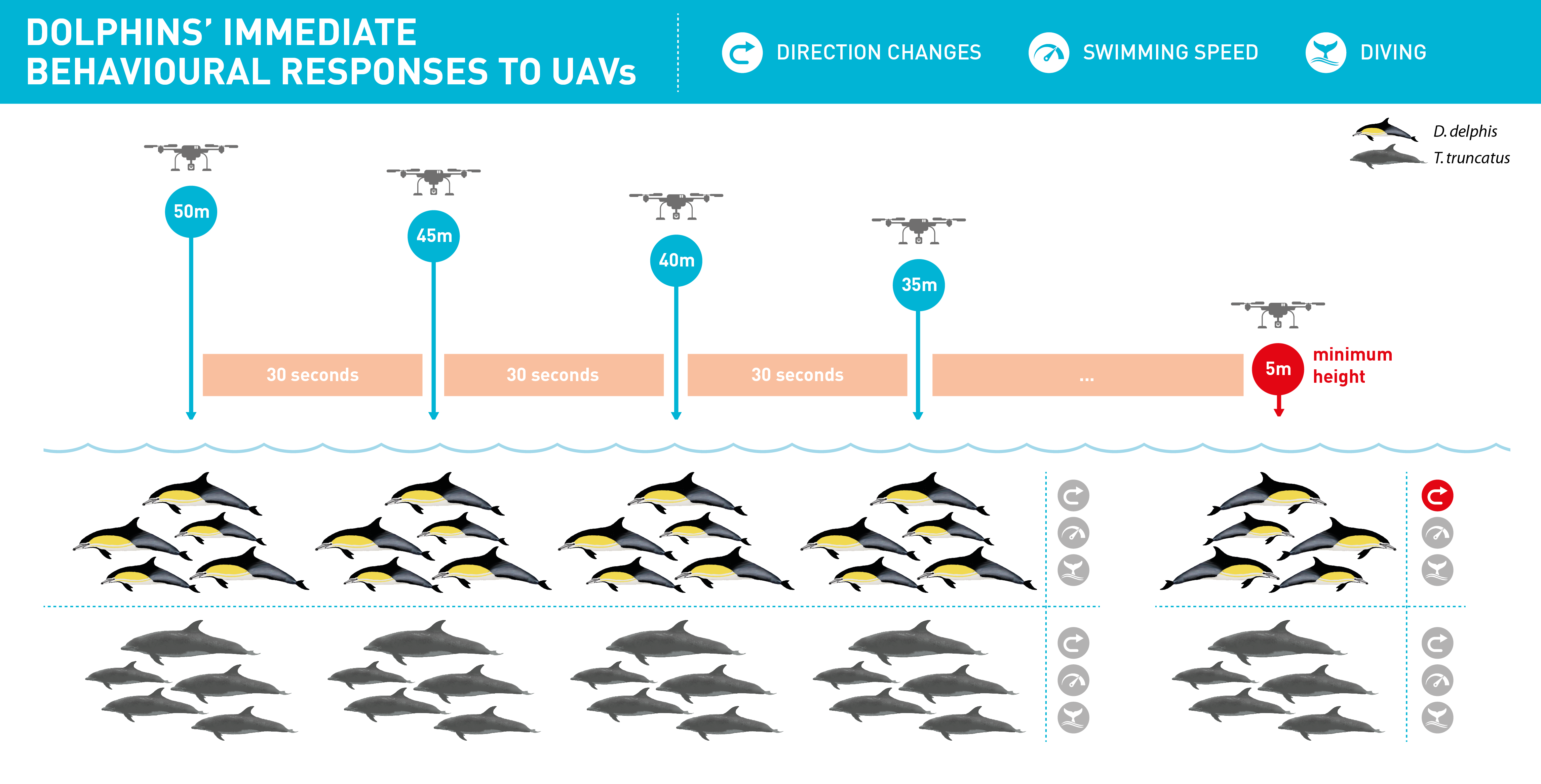
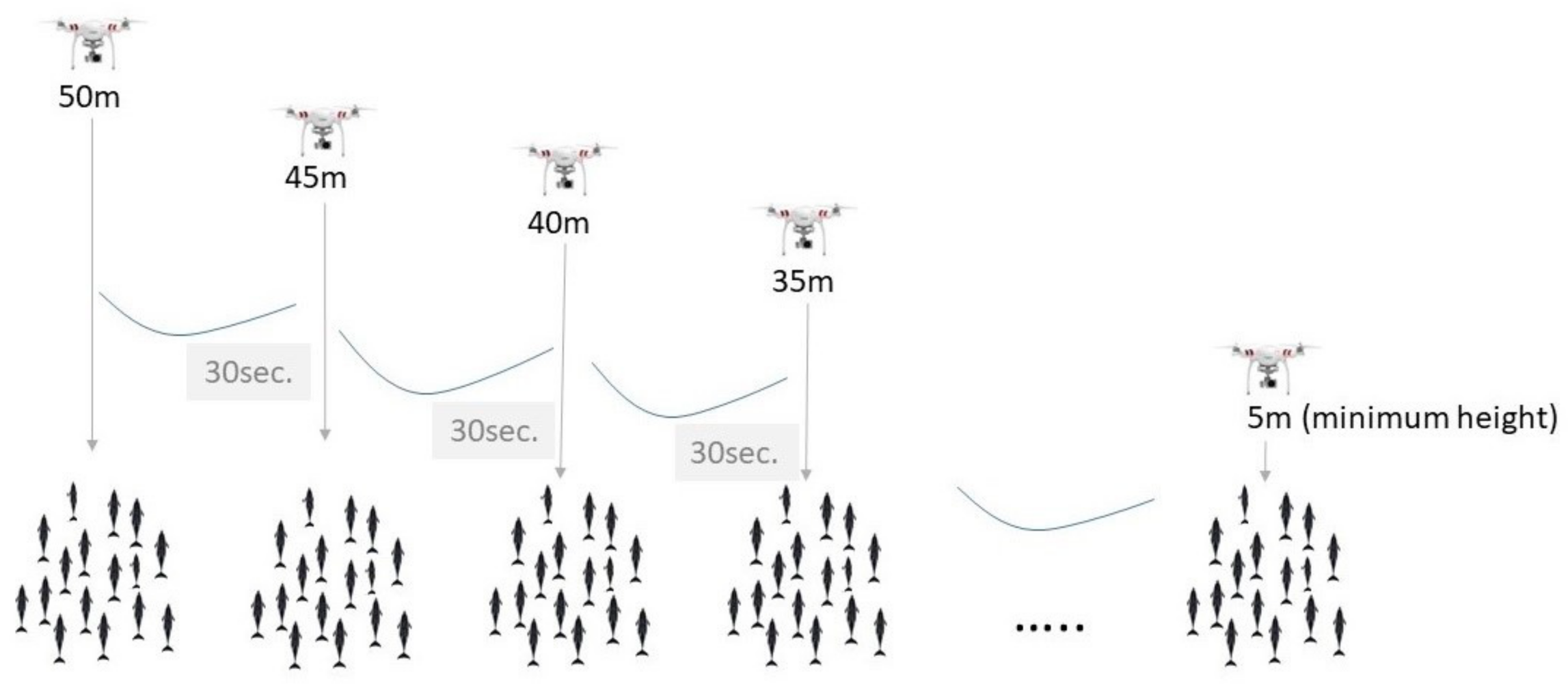
The research team consisted of a boat driver, UAV pilot and dolphin observer(s). Once the UAV was aloft, it was flown towards the dolphin group at an initial height of 70–100 m. When the group was inside the UAV’s field of view, it was slowly lowered to a height of 50 m directly above the dolphin group. The UAV subsequently descended 5 m every 30 s until reaching 5 m above sea level (Figure 1), resulting in 10 sampling periods. The time span of 30 s was chosen because: (i) we wanted to limit the amount of potential disturbance to the animals and (ii) we considered this an appropriate time interval to measure the animals’ immediate responses to the VTOL UAV [18]. Trials were performed once a day, with three exceptions when a total of two trials occurred on the same day. However, to prevent group resampling and thus pseudoreplication, in these cases the second trial was conducted ≥ 1 h after having navigated ≥ 1 nm in the opposite direction of the previously sampled group.
Before the start of each flight, the species, group size and behavioural state (Table 1) of the group were recorded. A “group” was defined following the 10 m chain rule and coordinated activity [28,29]. To examine the immediate behavioural responses of dolphins to the UAV, the following behavioural changes were considered: (i) direction—a change was considered to have occurred when the majority of the group exhibited a direction change of ≥45° with respect to the previous heading; (ii) swimming speed—a change was considered to have occurred when the speed of the group exceeded that of the vessel travelling at the same speed of the group and (iii) diving—when the majority of the group dove (i.e., individuals arched their back at the surface and increased their angle of re-entrance, diving vertically) synchronously for longer intervals than was previously observed. These variables were chosen because wild animals, including cetaceans, often perceive human activities as a predation threat and may consequently respond to anthropogenic disturbance by engaging in antipredation behaviours such as fleeing, increasing vigilance or altering habitat use [30,31,32]. Specifically, cetacean antipredation behaviours include changes in movement patterns [33,34,35], increases in swimming speed [33,34,35,36] and longer interbreath intervals [37].
All data were collected in real-time through visual observation from the research vessel (i.e., not through post hoc analysis of the UAV video). This method was used because optimal video recording can be affected by environmental variables (e.g., sun glare), which preclude the UAV from being flown directly above the dolphins. Each behavioural change was recorded as a binary measurement (i.e., “yes” or “no”) during each sampling interval. To avoid bias, the same person flew the UAV (A. Cid), and the same observer recorded behavioural data (J. Castro) throughout the study.
Statistical analysis was conducted using SPSS Statistics v. 25 (IBM, Armonk, NY). Heterogeneity between trials was assessed for each response variable (i.e., direction, speed, diving) to ensure assumptions of the statistical test were met. A Cochran’s Q test was performed to determine if dolphins exhibited immediate behavioural changes according to UAV height. Both species were tested separately, and the two-tailed significance level was set at α = 0.05. When significant, the Cochran’s Q test was followed by a Dunn’s post hoc test to determine at which heights the differences occurred.
3. Results
Data were collected on 15 and 10 groups of D. delphis and T. truncatus, respectively, from May to September 2017. For common dolphins, the majority (53%) of groups exhibited an initial behavioural state of travelling slow prior to each flight (Table 2). In contrast, the most common initial behavioural states of bottlenose dolphins were travelling average and socialising (both 40%). Average group sizes for common and bottlenose dolphins were 20.6 ± 19.3 SD and 13 ± 12.5 SD, respectively.
Common dolphins did not exhibit changes in diving behaviour or swimming speed with decreasing UAV height (Table 3). However, common dolphins did exhibit significant changes in direction. Specifically, D. delphis were observed performing significantly more direction changes when the UAV was at a height of 5 m (Z = 2.791, p = 0.005) compared to other heights, with the exception of 20 and 30 m. No other significant differences were observed for any of the other pairwise comparisons for D. delphis. T. truncatus showed no significant behavioural responses to the UAV; direction changes were not analysed since there was no response variation in this variable across all 10 observations (Table 3).
4. Discussion
The present study evaluated the immediate behavioural responses of common and bottlenose dolphins to a UAV flown at different heights. While previous research examined the impact of UAVs on bottlenose dolphins [18,20], to our knowledge, this is the first study to assess the impact of VTOL UAVs on common dolphins. The UAV did not cause a significant change in diving behaviour or swimming speed for either species.
For common dolphins (but not bottlenose dolphins), however, there were significant changes in direction when the UAV was flown at a height of 5 m. This suggests that common dolphins may be more sensitive than bottlenose dolphins to the effects of a UAV flown at very low heights. Our results indicated that common dolphins also responded to the UAV at heights of 20 and 30 m. One potential explanation is that the dolphins detected some level of risk or disturbance from the UAV at these heights and responded briefly by changing direction before developing a short-term habituation to the UAV. Overall, however, these results indicate that UAVs do not induce immediate behavioural responses when flown at heights of ≥ 10 m for common dolphins or ≥ 5 m for bottlenose dolphins.
These results demonstrate the feasibility of using UAVs as a non-invasive research tool in dolphin research. Using a UAV for behavioural studies can, for example, potentially reduce the impacts of the research vessel on the dolphins and reduce biased observations. It also allows the possibility of gathering high-quality videos, allowing a more detailed behavioural analysis and the opportunity to review the footage several times [7,20]. These devices also present a different and possibly more advantageous perspective on cetacean behaviour, with the possibility of observing subsurface behaviours [7,20]. In fact, Weir et al. [7] concluded that UAVs are better platforms than small research vessels for behavioural data collection on dusky dolphins, particularly when determining group spacing and interindividual interactions. In this same study, a UAV was used to quantify mother–calf behaviour (e.g., calf respiration and suckling rates), data that would be challenging to obtain via other methods. UAVs can also aid in assessing cetacean morphology and size [12,38], collecting biological samples such as respiratory blow [17] and measuring group composition, size and cohesion [7,14,20].
Fettermann et al. [20] reported that resting bottlenose dolphins reacted to the presence of a VTOL UAV when flown at a height of 10 m. Specifically, these individuals increased the number of reorientation and tail slap events at this height but exhibited no significant behavioural response at UAV heights ≥ 25 m. Similarly, Würsig et al. [39] found that small delphinids tend to be more sensitive to aerial disturbances of small research aircraft when milling or resting. In the present study, however, none of the sampled bottlenose dolphin groups displayed resting behaviour. This could explain the lack of any significant response to the UAV even at lower heights for this species.
Although bottlenose dolphins were not observed to change their behaviour with respect to UAV height, they were observed several times exhibiting an apparent visual interest (i.e., side swimming and side floating) under the UAV during sampling. Unfortunately, this was not recorded consistently and is based on anecdotal observations. Fettermann et al. [20] also reported observation of an individual bottlenose dolphin performing side floating behaviour just after the UAV’s shadow passed over its body, although they could not confirm this was a response to the UAV itself. However, a study conducted by Ramos et al. [18] identified that side floating/side roll events were the main responses exhibited by bottlenose dolphins towards the UAV, suggesting that measuring the incidence of side turning behaviours may be a useful way to detect responses to UAVs in some cetacean species.
Dolphin reactions may vary according to the behavioural state, size and composition of the dolphin group at the time of exposure to the UAV. For example, groups that are socialising or foraging may change direction, speed and diving behaviour more frequently than groups that are resting or travelling, making behavioural responses to the UAV difficult to discern. Further, groups that are smaller (vs. larger) or contain calves (vs. lack calves) may be more reactive, as observed in previous studies when cetaceans were exposed to aircraft [8]. Unfortunately, due to the small sample size in the present study, it was not possible to include these factors as independent variables in the model. However, these and other potentially confounding factors such as age, sex and biological state [11] should be considered in future studies.
The results reported in this study are based on observations of visible changes to dolphin behaviour in response to the UAV. It is also important to examine other potentially relevant indicators of disturbance (e.g., changes in the type and frequency of vocalisations, stress hormone levels) with respect to UAVs. Future research on the impact of UAVs on cetaceans should consider such traits as have been studied in other vertebrate species (e.g., black bears (Ursus americanus) [40], African elephants (Loxodonta africana) [41] and orangutans (Pongo abelii) [42]).
5. Conclusions
The results of this study indicate that UAVs are a powerful tool for cetacean research. While both D. delphis and T. truncatus exhibited few immediate behavioural responses to the UAV, the significant response by common dolphins should not be neglected. Caution should be taken when extrapolating these results to other regions since the high level of whale-watching activity at our study site may have habituated the dolphins to anthropogenic disturbance making it possible that they are less reactive compared to more secluded populations, which inhabit more remote areas [43]. In addition, the UAV used in this study was a small VTOL platform, and variation in size and power of other VTOLs could elicit different responses [2,11,20]. Further, it is possible that UAVs may induce unwanted and yet-to-be-determined impacts. As there could be species-specific responses [18], a “one-size-fits-all” approach may not be applicable [2]. Therefore, until further research reveals if and how UAVs affect the species of interest [3,44], the precautionary principle should be employed. Finally, it is imperative to develop and implement guidelines to minimise the potential impact of UAVs [44]. The present study intends to contribute towards this goal.
Author Contributions
Conceptualisation, J.C. and H.C.P.; methodology, J.C. and H.C.P.; software, A.C., M.I.L. and F.O.B.; validation, J.C., H.C.P. and R.R.; formal analysis, M.I.L., F.O.B. and H.C.P.; investigation, J.C., A.C. and H.C.P.; resources, J.C. and A.C.; data curation, J.C., M.I.L. and F.O.B.; writing—original draft preparation, J.C. and F.O.B.; writing—review and editing, H.C.P. and R.R.; visualisation, J.C., M.I.L. and F.O.B.; supervision, H.C.P. and R.R.; project administration, J.C and A.C.; funding acquisition, J.C., A.C., M.I.L., F.O.B., H.C.P. and R.R. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by Associação para a Investigação do Meio Marinho (AIMM) and by Fundação para a Ciência e a Tecnologia (FCT), through Programa Investigador FCT 2013 granted to R.R. FCT also supported this study through (i) the strategic project UID/MAR/04292/2019 granted to MARE and (ii) PhD grant to J.C. (SFRH/BD/134156/2017), M.I.L. (SFRH/BD/84297/2012) and F.O.B. (SFRH/BD/147294/2019). H.C.P. was also supported by the University of Alaska Southeast.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available on request.
Acknowledgments
The authors would like to thank all AIMM volunteers who participated in the data collection and particularly to the research assistants Selma Bajraktarevic, Laura van Zonneveld, Henry Harper and Alicia Quirin. This work was conducted under the authorisation of the Portuguese Conservation Institute (ICNF: AOC/17/2016).
Conflicts of Interest
The authors have no conflicts of interest to declare.
References
- Fiori, L.; Doshi, A.; Martinez, E.; Orams, M.B.; Bollard-Breen, B. The Use of Unmanned Aerial Systems in Marine Mammal Research. Remote Sens. 2017, 9, 543. [Google Scholar] [CrossRef] [Green Version]
- Smith, C.E.; Sykora-Bodie, S.T.; Bloodworth, B.; Pack, S.M.; Spradlin, T.R.; LeBoeuf, N.R. Assessment of known impacts of unmanned aerial systems (UAS) on marine mammals: Data gaps and recommendations for researchers in the United States. J. Unmanned Veh. Syst. 2016, 4, 31–44. [Google Scholar] [CrossRef] [Green Version]
- Christiansen, F.; Rojano-Doñate, L.; Madsen, P.T.; Bejder, L. Noise Levels of Multi-Rotor Unmanned Aerial Vehicles with Implications for Potential Underwater Impacts on Marine Mammals. Front. Mar. Sci. 2016, 3, 277. [Google Scholar] [CrossRef] [Green Version]
- Koski, W.R.; Allen, T.; Ireland, D.; Buck, G.; Smith, P.R.; Macrander, A.M.; Halick, M.A.; Rushing, C.; Sliwa, D.J.; McDonald, T.L. Evaluation of an Unmanned Airborne System for Monitoring Marine Mammals. Aquat. Mamm. 2009, 35, 347–357. [Google Scholar] [CrossRef]
- Christie, K.S.; Gilbert, S.L.; Brown, C.L.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 241–251. [Google Scholar] [CrossRef]
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned Aerial Vehicles (UAVs) for Surveying Marine Fauna: A Dugong Case Study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [Green Version]
- Weir, J.S.; Fiori, L.; Orbach, D.N.; Piwetz, S.; Protheroe, C.; Würsig, B. Dusky Dolphin (Lagenorhynchus obscurus) Mother–Calf Pairs: An Aerial Perspective. Aquat. Mamm. 2018, 44, 603–607. [Google Scholar] [CrossRef]
- Luksenburg, J.; Parsons, E.C.M. The effects of aircraft on cetaceans: Implications for aerial whalewatching. In Proceedings of the 61st Meeting of the International Whaling Commission, IWC, Madeira, Portugal, 31 May–12 June 2009. [Google Scholar]
- Patenaude, N.J.; Richardson, W.J.; Smultea, M.A.; Koski, W.R.; Miller, G.W.; Wursig, B.; Greene, C.R. Aircraft sound and disturbance to bowhead and beluga whales during spring migration in the Alaskan Beaufort Sea. Mar. Mammal Sci. 2002, 18, 309–335. [Google Scholar] [CrossRef]
- Moreland, E.E.; Cameron, M.F.; Angliss, R.P.; Boveng, P.L. Evaluation of a ship-based unoccupied aircraft system (UAS) for surveys of spotted and ribbon seals in the Bering Sea pack ice. J. Unmanned Veh. Syst. 2015, 3, 114–122. [Google Scholar] [CrossRef] [Green Version]
- Pomeroy, P.; O’Connor, L.; Davies, P. Assessing use of and reaction to unmanned aerial systems in gray and harbor seals during breeding and molt in the UK. J. Unmanned Veh. Syst. 2015, 3, 102–113. [Google Scholar] [CrossRef] [Green Version]
- Durban, J.W.; Fearnbach, H.; Barrett-Lennard, L.G.; Perryman, W.L.; Leroi, D.J. Photogrammetry of killer whales using a small hexacopter launched at sea. J. Unmanned Veh. Syst. 2015, 3, 131–135. [Google Scholar] [CrossRef]
- Fiori, L.; Martinez, E.; Bader, M.K.-F.; Orams, M.B.; Bollard, B. Insights into the use of an unmanned aerial vehicle (UAV) to investigate the behavior of humpback whales (Megaptera novaeangliae) in Vava’u, Kingdom of Tonga. Mar. Mammal Sci. 2019, 36, 209–223. [Google Scholar] [CrossRef]
- Hodgson, A.; Peel, D.; Kelly, N. Unmanned aerial vehicles for surveying marine fauna: Assessing detection probability. Ecol. Appl. 2017, 27, 1253–1267. [Google Scholar] [CrossRef] [PubMed]
- Torres, L.G.; Nieukirk, S.L.; Lemos, L.; Chandler, T.E. Drone Up! Quantifying Whale Behavior From a New Perspective Improves Observational Capacity. Front. Mar. Sci. 2018, 5, 319. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, M.L.K.; Sprogis, K.R.; Bejder, L.; Madsen, P.T.; Christiansen, F. Behavioural development in southern right whale calves. Mar. Ecol. Prog. Ser. 2019, 629, 219–234. [Google Scholar] [CrossRef]
- Acevedo-Whitehouse, K.; Rocha-Gosselin, A.; Gendron, D. A novel non-invasive tool for disease surveillance of free-ranging whales and its relevance to conservation programs. Anim. Conserv. 2010, 13, 217–225. [Google Scholar] [CrossRef]
- Ramos, E.A.; Maloney, B.; Magnasco, M.O.; Reiss, D. Bottlenose Dolphins and Antillean Manatees Respond to Small Multi-Rotor Unmanned Aerial Systems. Front. Mar. Sci. 2018, 5, 316. [Google Scholar] [CrossRef]
- Morimura, N.; Mori, Y. Social responses of travelling finless porpoises to boat traffic risk in Misumi West Port, Ariake Sound, Japan. PLoS ONE 2019. [Google Scholar] [CrossRef]
- Fettermann, T.; Fiori, L.; Bader, M.; Doshi, A.; Breen, D.; Stockin, K.A.; Bollard, B. Behaviour reactions of bottlenose dolphins (Tursiops truncatus) to multirotor Unmanned Aerial Vehicles (UAVs). Sci. Rep. 2019, 9, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Sardà-Palomera, F.; Bota, G.; Viñolo, C.; Pallarés, O.; Sazatornil, V.; Brotons, L.; Gomáriz, S.; Sardà, F. Fine-scale bird monitoring from light unmanned aircraft systems. IBIS 2012, 154, 177–183. [Google Scholar]
- Nummela, S.; Thewissen, J.G.M.; Bajpai, S.; Hussain, T.; Kumar, K. Sound transmission in archaic and modern whales: Anatomical adaptations for underwater hearing. Anat. Rec. 2007, 290, 716–733. [Google Scholar] [CrossRef] [PubMed]
- Weller, D.W. Predation on Marine Mammals. In Encyclopedia of Marine Mammals, 3rd ed.; Würsig, B.G., Thewissen, J.G.M., Kovacs, K.M., Eds.; Academic Press: London, UK; San Diego, CA, USA, 2018; pp. 772–780. ISBN 978-0-12-804327-1. [Google Scholar]
- Moura, A.E.; Sillero, N.; Rodrigues, A. Common dolphin (Delphinus delphis) habitat preferences using data from two platforms of opportunity. Acta oecologica 2012, 38, 24–32. [Google Scholar] [CrossRef]
- Castro, J.; Couto, A.; Borges, F.O.; Cid, A.; Laborde, M.I.; Pearson, H.C.; Rosa, R. Oceanographic Determinants of the Abundance of Common Dolphins (Delphinus delphis) in the South of Portugal. Oceans 2020, 1, 165–173. [Google Scholar] [CrossRef]
- Ely, C.P. Analysis of Bottlenose (Tursiops truncatus) and Common (Delphinus delphis) Dolphin Behaviour in the Presence of Whale-Watching Vessels in Albufeira, Portugal. Master’s Thesis, University of Southampton, Southampton, UK, 2018. [Google Scholar]
- Castro, J.M.C. Characterization of Cetaceans in the South Coast of Portugal between Lagos and Cape São Vicente. Master’s Thesis, Universidade de Lisboa, Lisboa, Portugal, 2010. [Google Scholar]
- Pearson, H.C. Influences on dusky dolphin (Lagenorhynchus obscurus) fission-fusion dynamics in Admiralty Bay, New Zealand. Behav. Ecol. Sociobiol. 2009, 63, 1437–1446. [Google Scholar] [CrossRef]
- Smolker, R.A.; Richards, A.F.; Connor, R.C.; Pepper, J.W. Sex Differences in Patterns of Association among Indian Ocean Bottlenose Dolphins. Behaviour 1992, 123, 38–69. [Google Scholar] [CrossRef]
- Frid, A.; Dill, L.M. Human-caused disturbance stimuli as a form of predation risk. Conserv. Ecol. 2020, 6, 11. [Google Scholar] [CrossRef]
- Howland, H.C. Optimal strategies for predator avoidance: The relative importance of speed and manoeuvrability. J. Theor. Biol. 1974, 47, 333–350. [Google Scholar] [CrossRef]
- Weihs, D.; Webb, P.W. Optimal avoidance and evasion tactics in predator-prey interactions. J. Theor. Biol. 1984, 106, 189–206. [Google Scholar] [CrossRef] [Green Version]
- Baker, C.S.; Herman, L.M. Behavioural Responses of Summering Humpback Whales to Vessel Traffic: Experimental and Opportunistic Observations; Final Report to the National Park Service; Alaska Regional Office: Anchorage, AK, USA, 1989. [Google Scholar]
- Nowacek, S.M.; Wells, R.S.; Solow, A.R. Short-term effects of boat traffic on bottlenose dolphins, Tursiops truncatus, in Sarasota Bay, Florida. Mar. Mammal Sci. 2001, 17, 673–688. [Google Scholar] [CrossRef]
- Williams, R.; Trites, A.W.; Bain, D.E. Behavioural responses of killer whales (Orcinus orca) to whale-watching boats: Opportunistic observations and experimental approaches. J. Zool. 2002, 256, 255–270. [Google Scholar] [CrossRef]
- Blane, J.; Jaakson, R. The Impact of Ecotourism Boats on the St Lawrence Beluga Whales. Environ. Cons. 1994, 21, 267–269. [Google Scholar] [CrossRef]
- Lusseau, D. Male and female bottlenose dolphins Tursiops spp. have different strategies to avoid interactions with tour boats in Doubtful Sound, New Zealand. Mar. Ecol. Prog. Ser. 2003, 257, 267–274. [Google Scholar] [CrossRef]
- Christiansen, F.; Dujon, A.M.; Sprogis, K.R.; Arnould, J.P.Y.; Bejder, L. Noninvasive unmanned aerial vehicle provides estimates of the energetic cost of reproduction in humpback whales. Ecosphere 2016, 7, e01468. [Google Scholar] [CrossRef]
- Würsig, B.; Lynn, S.K.; Jefferson, T.A.; Mullin, K.D. Behaviour of cetaceans in the northern Gulf of Mexico relative to survey ships and aircraft. Aquat. Mamm. 1998, 24, 41–50. [Google Scholar]
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears Show a Physiological but Limited Behavioral Response to Unmanned Aerial Vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef] [Green Version]
- Vermeulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouché, P. Unmanned Aerial Survey of Elephants. PLoS ONE 2013, 8, e54700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koh, L.P.; Wich, S.A. Dawn of drone ecology: Low-cost autonomous aerial vehicles for conservation. Trop. Conserv. Sci. 2012, 5, 121–132. [Google Scholar] [CrossRef] [Green Version]
- Bejder, L.; Samuels, A.; Whitehead, H.; Finn, H.; Allen, S. Impact assessment research: Use and misuse of habituation, sensitisation and tolerance in describing wildlife responses to anthropogenic stimuli. Mar. Ecol. Prog. Ser. 2009, 395, 177–185. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, R404–R405. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Experimental design used to test the immediate behavioural responses of Delphinus delphis and Tursiops truncatus to a Vertical Take-off and Landing Unmanned Aerial Vehicle.
Figure 1.
Experimental design used to test the immediate behavioural responses of Delphinus delphis and Tursiops truncatus to a Vertical Take-off and Landing Unmanned Aerial Vehicle.


{kind=link}
{kind=link}
Table 1.
Definitions of behavioural states for Delphinus delphis and Tursiops truncatus.
| Behavioural State | Definition |
|---|---|
| Foraging | Searching for or consuming prey, as indicated by long, deep dives followed by loud forceful exhalations (“chuffs”) and directionless movement; may include coordinated “burst swims” (rapid bursts of speed), “clean” noiseless headfirst re-entry leaps, coordinated clean leaps and tail slaps |
| Resting | Slow directionless movement at speeds of < 3 knots close to the surface with low activity level; often includes slow surfacing and floating near the surface |
| Socialising | Interacting with each other or inanimate objects; usually directionless movement and may include body and pectoral fin rubbing, rolling, belly-up swimming, spyhops, splashing at the surface, chasing, leaping, mating and playing with seaweed |
| Travelling slow | Steady movement in one direction at speeds of < 3 knots |
| Travelling average | Steady movement in one direction at speeds of 3 to 5 knots |
| Travelling fast | Steady movement in one direction at speeds of > 5 knots |
Table 2.
Initial behavioural state for Delphinus delphis (n = 15) and Tursiops truncatus (n = 10) groups prior to the start of each Vertical Take-off and Landing Unmanned Aerial Vehicle flight.
Table 2.
Initial behavioural state for Delphinus delphis (n = 15) and Tursiops truncatus (n = 10) groups prior to the start of each Vertical Take-off and Landing Unmanned Aerial Vehicle flight.
| Species | Travelling Slow (%) | Travelling Average (%) | Travelling Fast (%) | Socialising (%) | Feeding (%) |
|---|---|---|---|---|---|
| Delphinus delphis | 53.3 | 13.3 | 20.0 | 6.7 | 6.7 |
| Tursiops truncatus | 20.0 | 40.0 | 0 | 40.0 | 0 |
Table 3.
Results of Cochran’s Q tests performed to determine behavioural responses of Delphinus delphis and Tursiops truncatus to the vertical approach of a Vertical Take-off and Landing Unmanned Aerial Vehicle (significant values shown in bold).
Table 3.
Results of Cochran’s Q tests performed to determine behavioural responses of Delphinus delphis and Tursiops truncatus to the vertical approach of a Vertical Take-off and Landing Unmanned Aerial Vehicle (significant values shown in bold).
| Species | Behavioural Response | N | Cochran’s Q | df | p-Value |
|---|---|---|---|---|---|
| Delphinus delphis | Diving | 15 | 14.27 | 9 | 0.113 |
| Direction change | 15 | 18.00 | 9 | 0.035 | |
| Swimming speed | 15 | 13.09 | 9 | 0.159 | |
| Tursiops truncatus | Diving | 10 | 13.05 | 9 | 0.161 |
| Swimming speed | 10 | 9.00 | 9 | 0.437 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Castro, J.; Borges, F.O.; Cid, A.; Laborde, M.I.; Rosa, R.; Pearson, H.C. Assessing the Behavioural Responses of Small Cetaceans to Unmanned Aerial Vehicles. Remote Sens. 2021, 13, 156. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13010156
AMA Style
Castro J, Borges FO, Cid A, Laborde MI, Rosa R, Pearson HC. Assessing the Behavioural Responses of Small Cetaceans to Unmanned Aerial Vehicles. Remote Sensing. 2021; 13(1):156. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13010156
Chicago/Turabian StyleCastro, Joana, Francisco O. Borges, André Cid, Marina I. Laborde, Rui Rosa, and Heidi C. Pearson. 2021. "Assessing the Behavioural Responses of Small Cetaceans to Unmanned Aerial Vehicles" Remote Sensing 13, no. 1: 156. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13010156
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.