1. Introduction
During the recently completed Priority Program of the German Science Foundation “Harbors from the Roman Period to the Middle Ages” [
1], a large number of possible ancient harbor sites with different subsurface properties were geophysically investigated. The investigation and identification of such sites often includes the shallow water area close to the shore, where common depth resolving geophysical prospection methods (i.e., electrical resistivity tomography, ground penetrating radar) are limited in depth penetration and resolution due to high signal attenuation caused by high salinity. Nevertheless, there are a few shallow water applications of these methods. Magnetic investigations have been applied in several studies, e.g., [
2] used a magnetic survey to investigate a sunken military vessel and [
3] conducted a marine magnetic survey to map the buried structure of a harbor. Examples of a successful application of ERT are shown in [
2,
4,
5,
6]. Ref. [
5] showed that ERT provides a robust method for mapping submerged archaeological structures like walls, buildings, and roads of a submerged archaeological site in Greece, and [
6] investigate the applicability of offshore geoelectrical profiling using field data and synthetic resistivity models. Successful applications of GPR in shallow water are rare and can be found in [
7], who applied GPR to detect detonated and unexploded bombs within the sediment in a lake and in [
8], who use GPR to locate lumber both in the water column and below the lake bottom within the sediment. In contrast to these methods, reflection seismic methods provide a resolution in the decimeter range and penetration depths of several meters, which is needed for high accuracy archaeological investigations. Examples for the application of high-resolution seismic measurements in shallow water archaeological investigation are found in [
9,
10], where Medieval remnants as well as shallow stratigraphic layers were investigated. Therefore, seismic methods move into the focus of interest, although for the very shallow water depths of less than 5.0 m, required in ancient harbor research as well as in studies of coastal evolution, coastal changes, and coastal protection, multiple reflections of the seismic signal in the water layer pose a major problem in data processing as they interfere with possible reflections from structures of interest.
Multiple reflections have been a well-known problem in marine seismic reflection imaging for the past seventy-odd years. In general, multiples are considered as noise, as they have significant energy and can be misinterpreted as or mask primary reflections. Especially in shallow water areas multiples can interfere with weak primary signals reflected by structures of interest. Multiple events are defined as events that have experienced more than one upward reflection along their travel paths. Based on the location of their downward reflection, multiples are classified into several categories [
11]: if all downward reflections occur below the surface, we speak of internal multiples, whereas if one or more downward reflections occur at the free surface, the multiple is called a free-surface multiple. In marine seismic data, multiple reflections from the water surface and reverberations of the seismic signal in the water column are quite common; therefore, these types of multiple events are termed water-layer multiples in the following. In exploration seismics, the removal of multiple energy from the data is a longstanding issue; therefore, the development and improvement of effective removal methods is still of important interest in industry and research [
12]. To overcome the problem of water-layer multiples, many removal methods have been developed, which can be divided into three basic approaches [
13]: (1) processes which distinguish and separate multiples from primaries (e.g., predictive deconvolution, Radon, tau-p, and dip filtering), (2) methods that predict multiples and subtract them from the data (wavefield extrapolation, surface-related multiple elimination (SRME)), and (3) techniques, that include multiples in processing algorithms (e.g., Full-Wavefield Migration).
Classical multiple attenuation techniques seek for a property that differentiates primary from multiple energy. The oldest way of attenuating multiples is done by predictive deconvolution, where the periodic character of multiples is exploited, and a filter is designed to remove the repetition effect. Ref. [
14] first used an inverse filter convolved with the seismic traces to remove water-layer multiples. Refs. [
15,
16,
17] further developed the inverse filter concept, and [
18] extended the deconvolution approach to situations where multiples are not periodic by a multi-channel predictive deconvolution. Attenuation methods of the second basic category are based on the wave equation, which describes the behavior of a wave field in time and space. By assuming knowledge of the water layer depth and its seismic velocity, the measured wave field at the surface is used to predict water-layer multiples, which then can be subtracted from the recorded data. This approach has been first introduced by [
19]. Many contributions were made over the years by [
20,
21,
22,
23]. This approach is nowadays known as “Surface-related multiple elimination” and defines today’s industry’s standard. In recent years, the third basic category of multiple removal methods has evolved, where multiples are treated as signal rather than noise. A general scheme for migrating all surface-related multiples in a data set has been described by [
24]. A migration scheme that uses all types of events based on a full two-way scalar wave equation has been proposed by [
25].
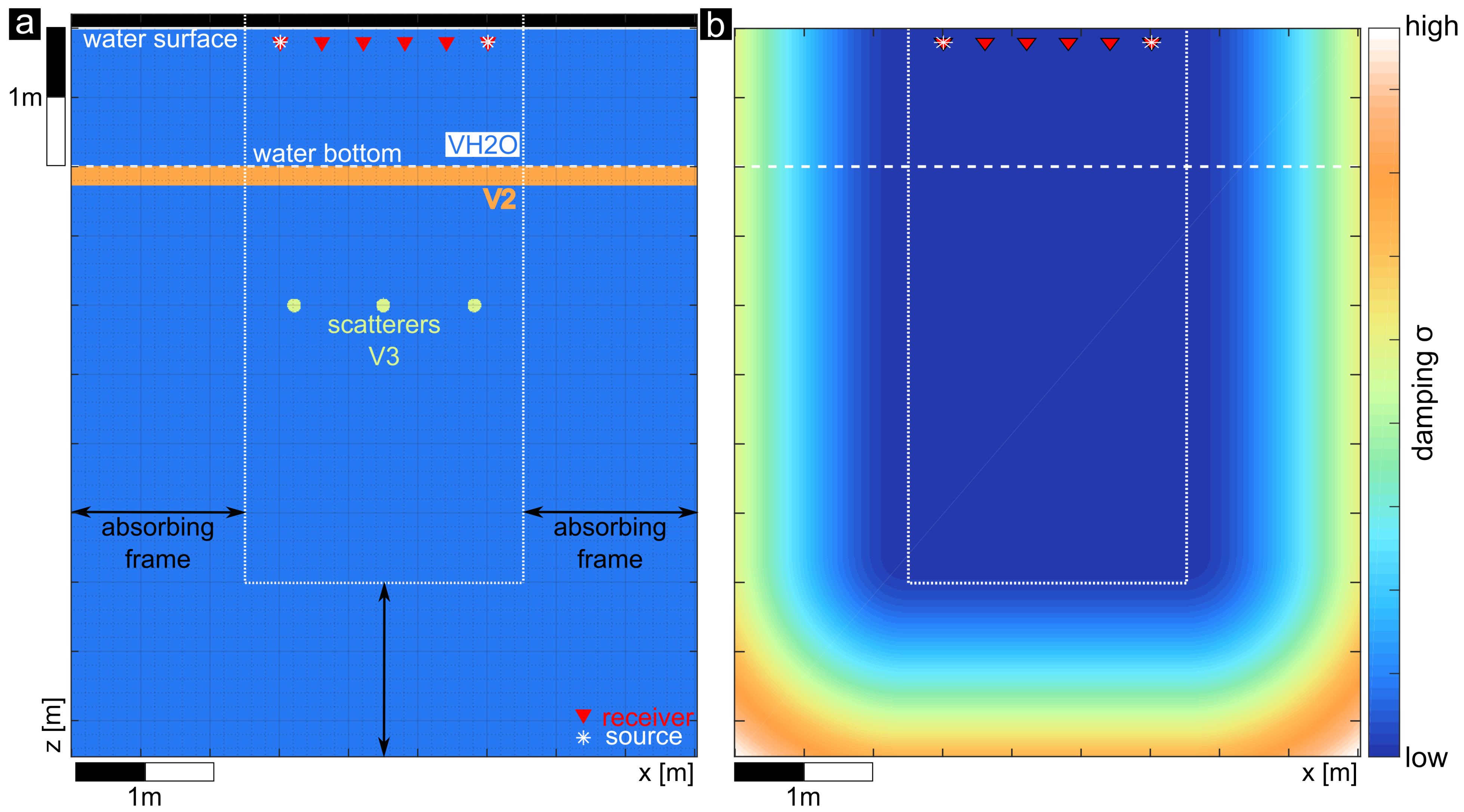
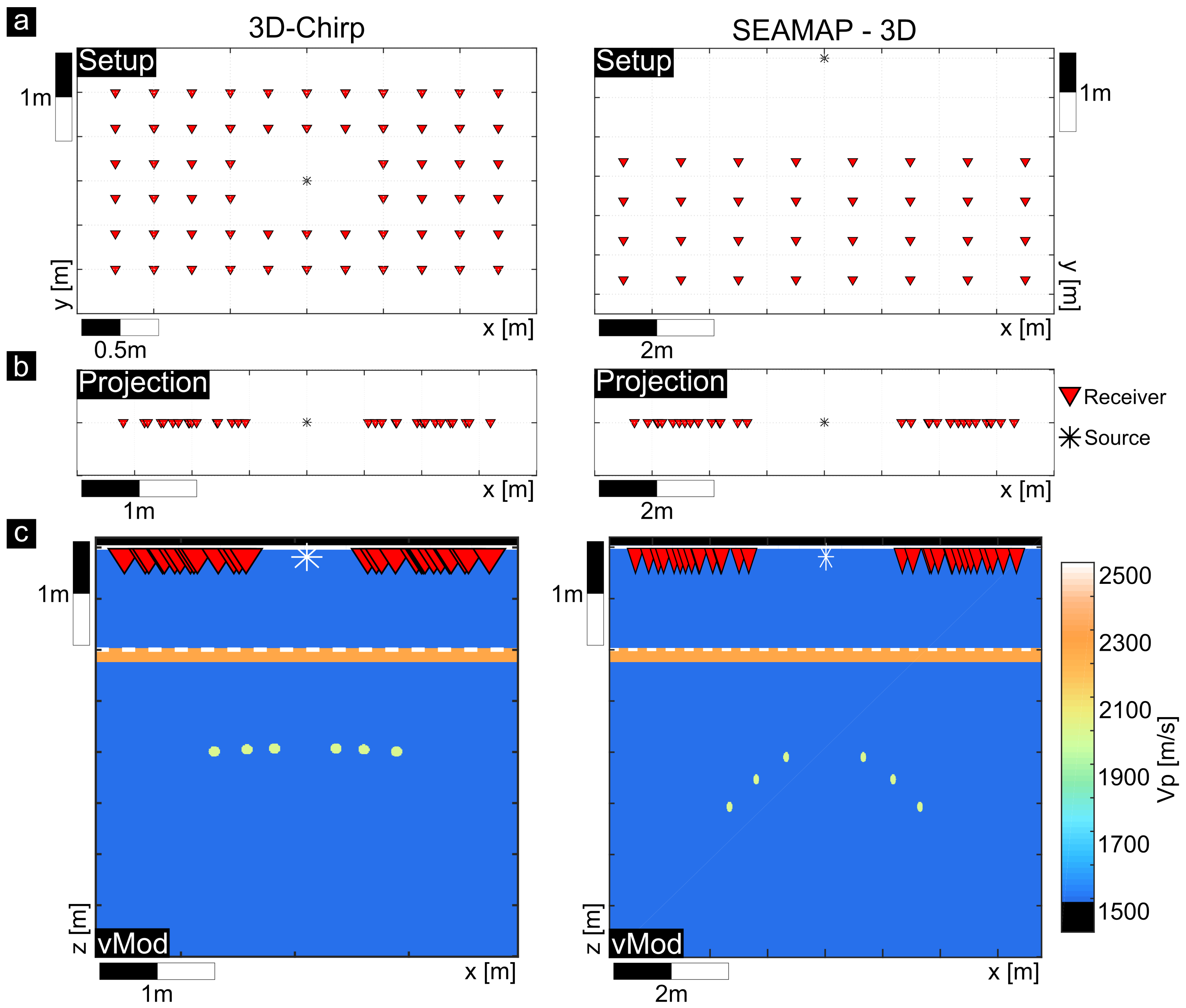
However, special difficulties arise for the application of the above-mentioned multiple suppression algorithms from the very shallow water depths investigated in geophysical and archaeological studies of the near-shore area on the one hand and from the applied reflection seismic system which differs from the systems commonly used in large scale seismic acquisition on the other hand. The usage of the newly developed marine seismic acquisition system by [
26] consisting of two pinger sources and six hydrophones, allows for an acquisition with efficient area coverage of the target sites with a 1.5 m wide swath of seismic data in a single run (
Figure 1a). For profile-wise acquisition a constant-offset configuration consisting of one pinger source and one hydrophone is used (
Figure 1b). Both configurations can be operated in water depth as shallow as 0.3 m and are representative for marine seismic archaeological prospection in terms of high-resolution few-meters-3D systems (e.g., 3D-chirp [
27,
28], SEAMAP-3D [
29,
30], SES quattro [
10]) and single beam sediment echo sounders e.g., [
31,
32]. In contrast to large scale seismic acquisition systems, the system allows only for single coverage of the subsurface. Furthermore, solely near, but no large offsets can be acquired, this means that in the case of typical water depths minimum offsets correspond to about
and maximum offsets to
times the water depth. In contrast to this, the data acquired by large scale seismic investigations usually contain large offsets as well as a multi-fold coverage of the subsurface reflection points. Not only the offset range and the water depth, but also the frequency ranges of high-resolution marine seismic few-meters-3D systems are different from large scale seismic acquisition systems. The ratios between water depth and frequency, as well as maximum offset and frequency is typically less than 1 for systems applied in marine seismic archaeological prospection, whereas they are greater than 1 for typical setups in large scale seismic acquisition. The ratio between maximum offset and water depth is smaller than 5 for systems applied in marine seismic archaeological prospection and greater than 5 for large scale seismic acquisition systems (see
Appendix A). Archaeology is usually buried only a few meters below the water bottom and the water depths for harbor research in the near-shore area are usually shallow leading to multiples interfering with primaries reflected from archaeology or layer boundaries associated with early landscape stratigraphy. Apart from the acquired offsets and coverage, the effectiveness of classical multiple removal methods is reduced as simple assumptions made be these methods are violated. These include the periodicity of multiples, roughness of the water bottom, horizontal stratification of subsurface reflectors, sufficient move-out along with possible separation of primaries and multiples, as well as the source-receiver offset in relation to the water depth.
As all these factors limit the applicability of classical methods, we evaluate two model-driven approaches to remove water-layer multiples for pre-defined constant-offset as well as multi-offset synthetic test scenarios of shallow water archaeological prospection as accessible by the above-mentioned systems in the present study. In order to place these approaches in context, the results are compared with those of common multiple attenuation methods, that are usually applied in large scale seismic acquisition. In particular the following aspects and questions will be addressed:
Applicability of both approaches to data acquired using our multi- as well as constant-offset systems tested with synthetic data sets.
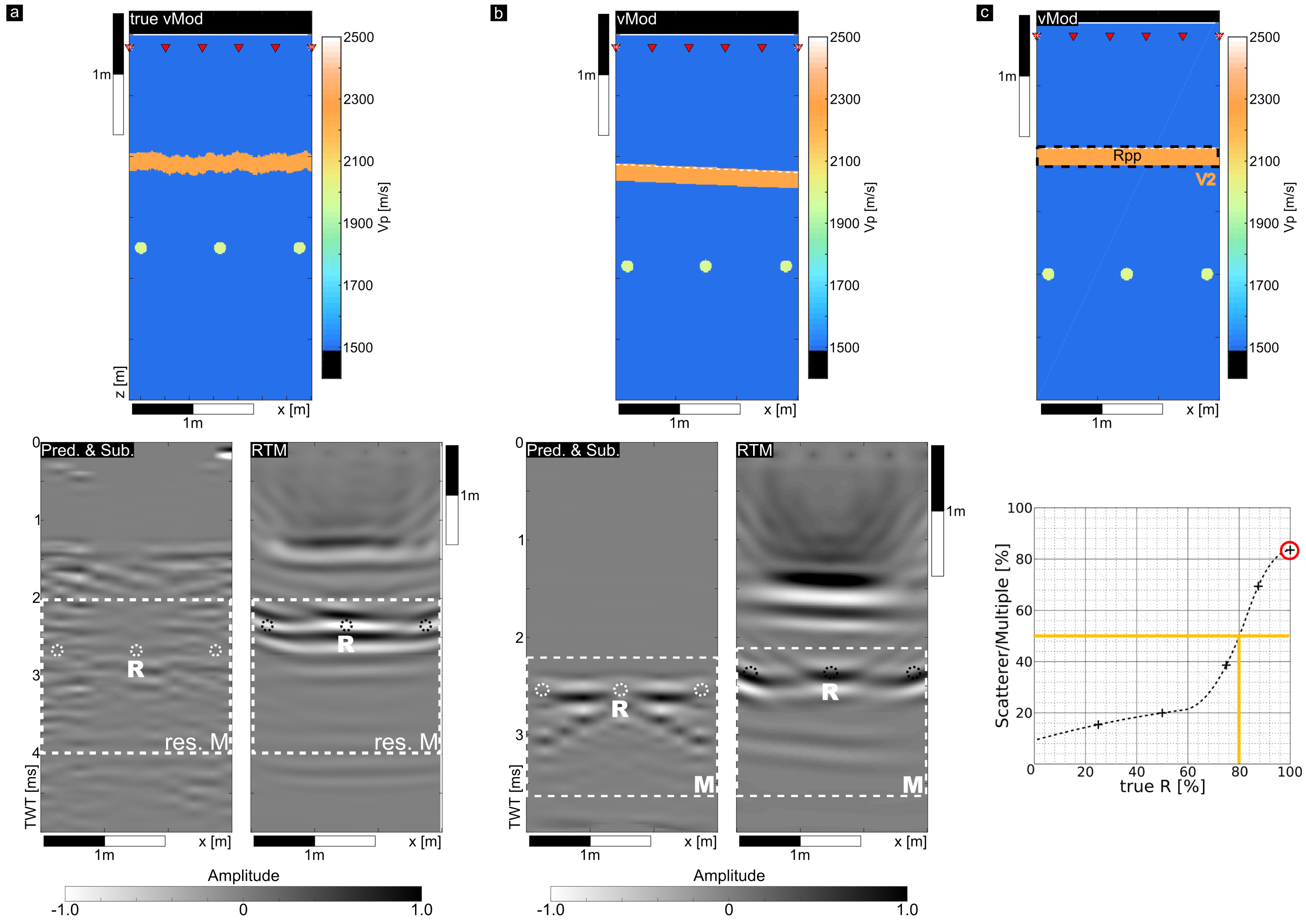
How do uncertainties in the determination of models, e.g., water depth and seafloor reflection coefficients influence multiple attenuation?
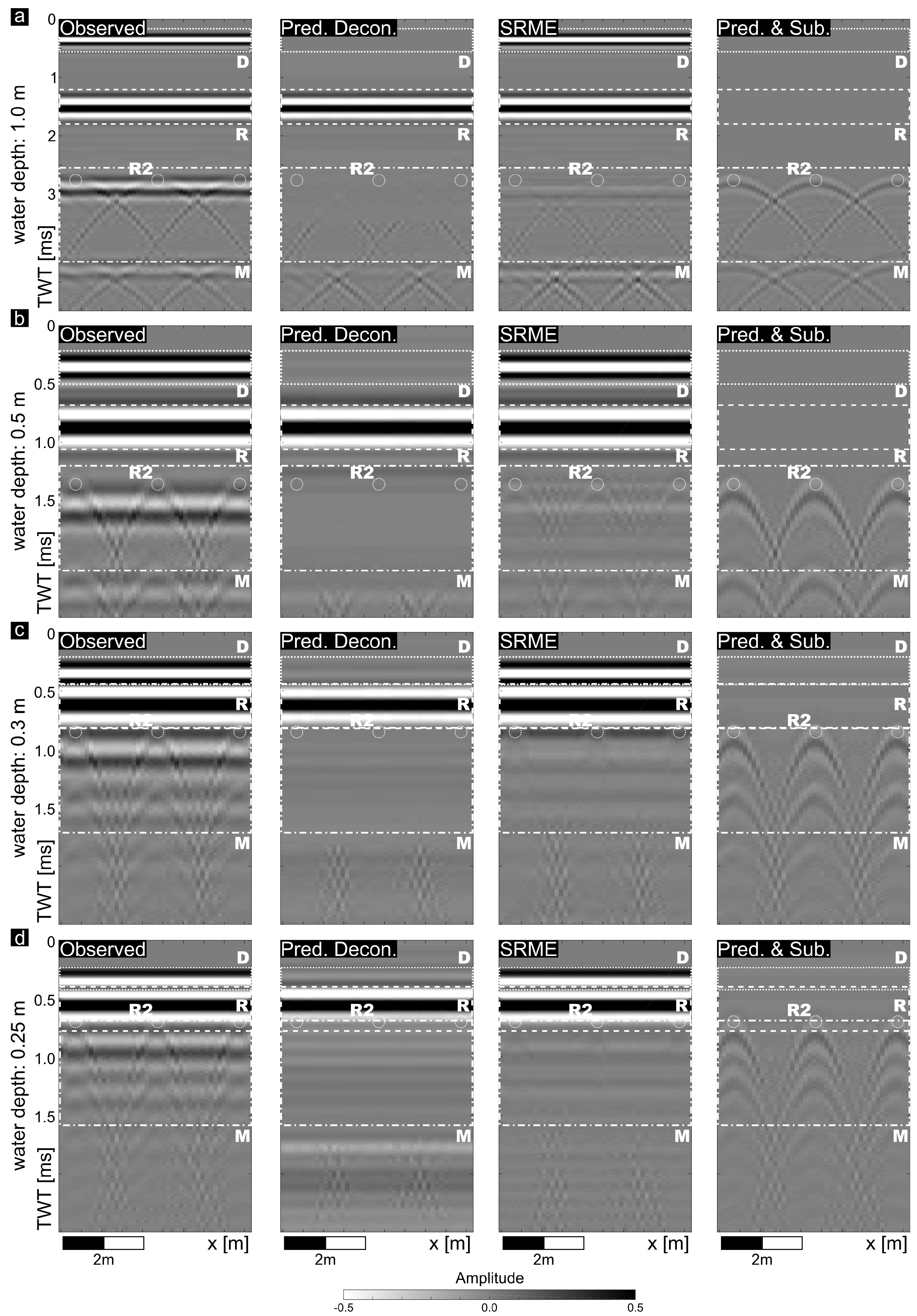
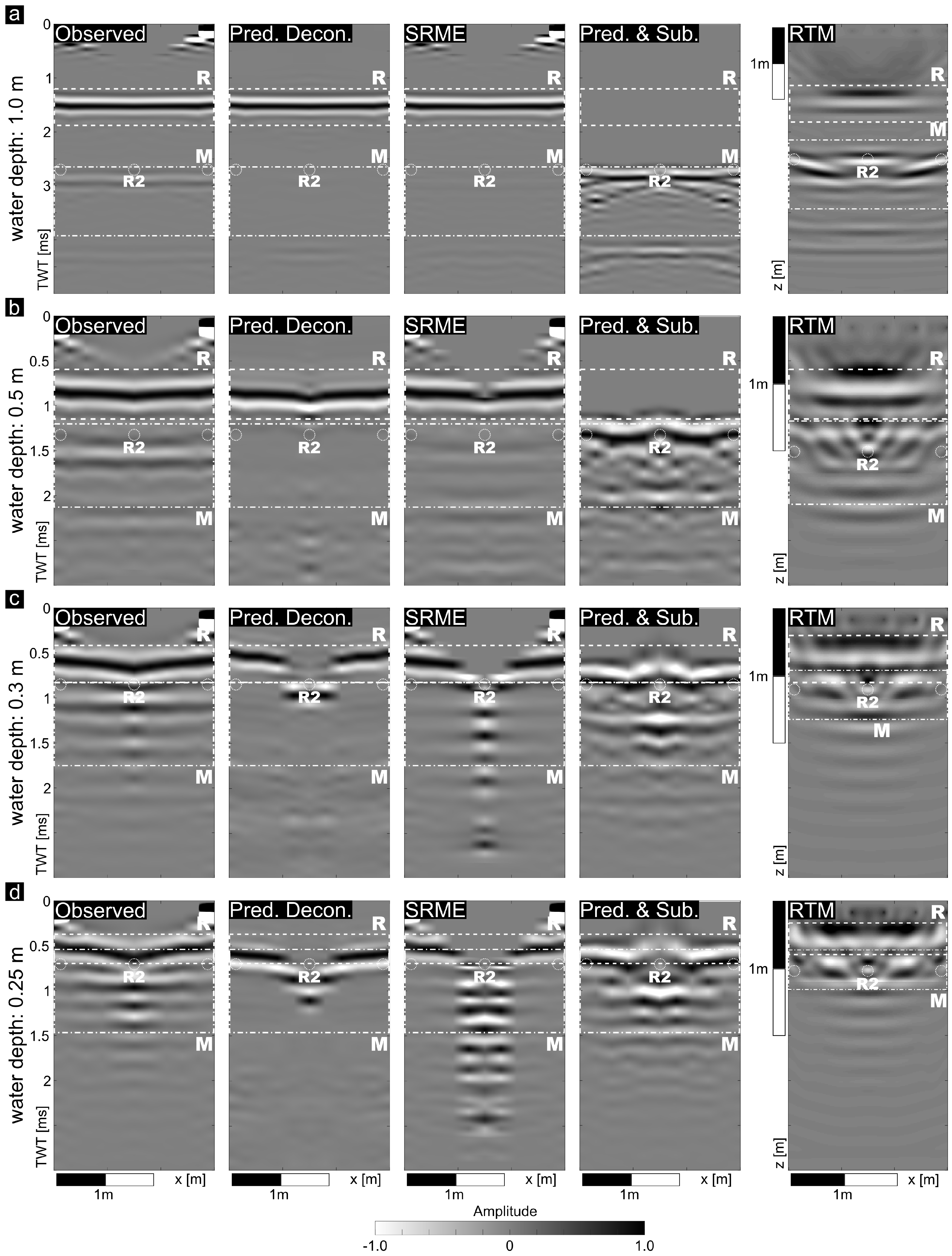
How do these approaches perform compared to common methods such as Predictive Deconvolution and SRME concerning multiple removal efficiency, preparation and computation time as well as applicability in shallow water with available system setups?
The applicability of both approaches and common methods are further tested and compared for synthetic data with the 3D-Chirp and SEAMAP-3D setups. Last, the suggested approaches are applied to two field data sets recorded using the acquisition system PingPong and a constant-offset single channel setup system.
5. Conclusions
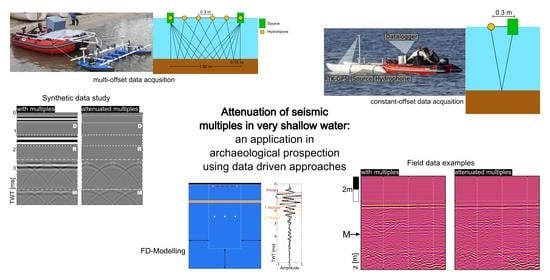
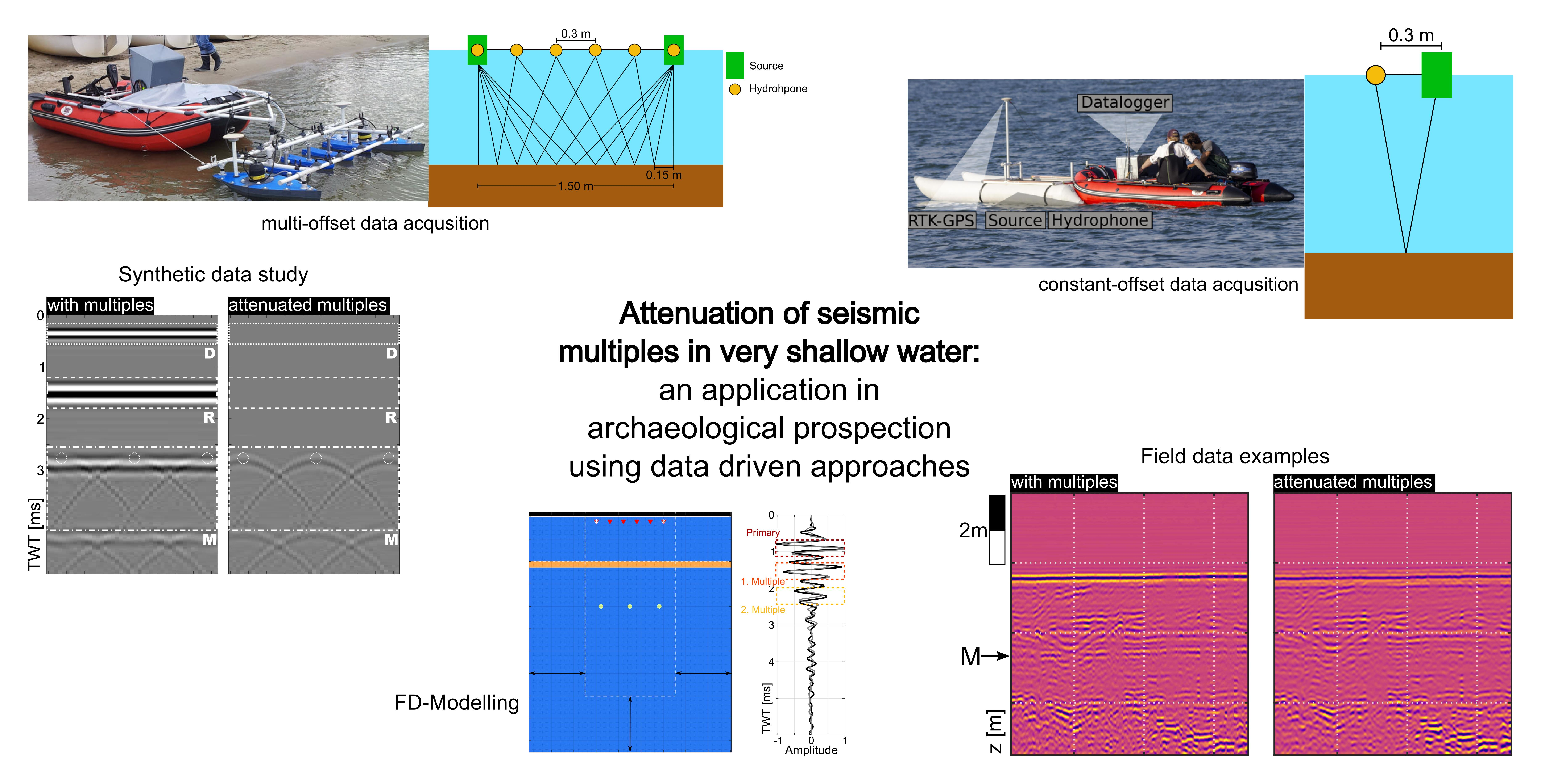
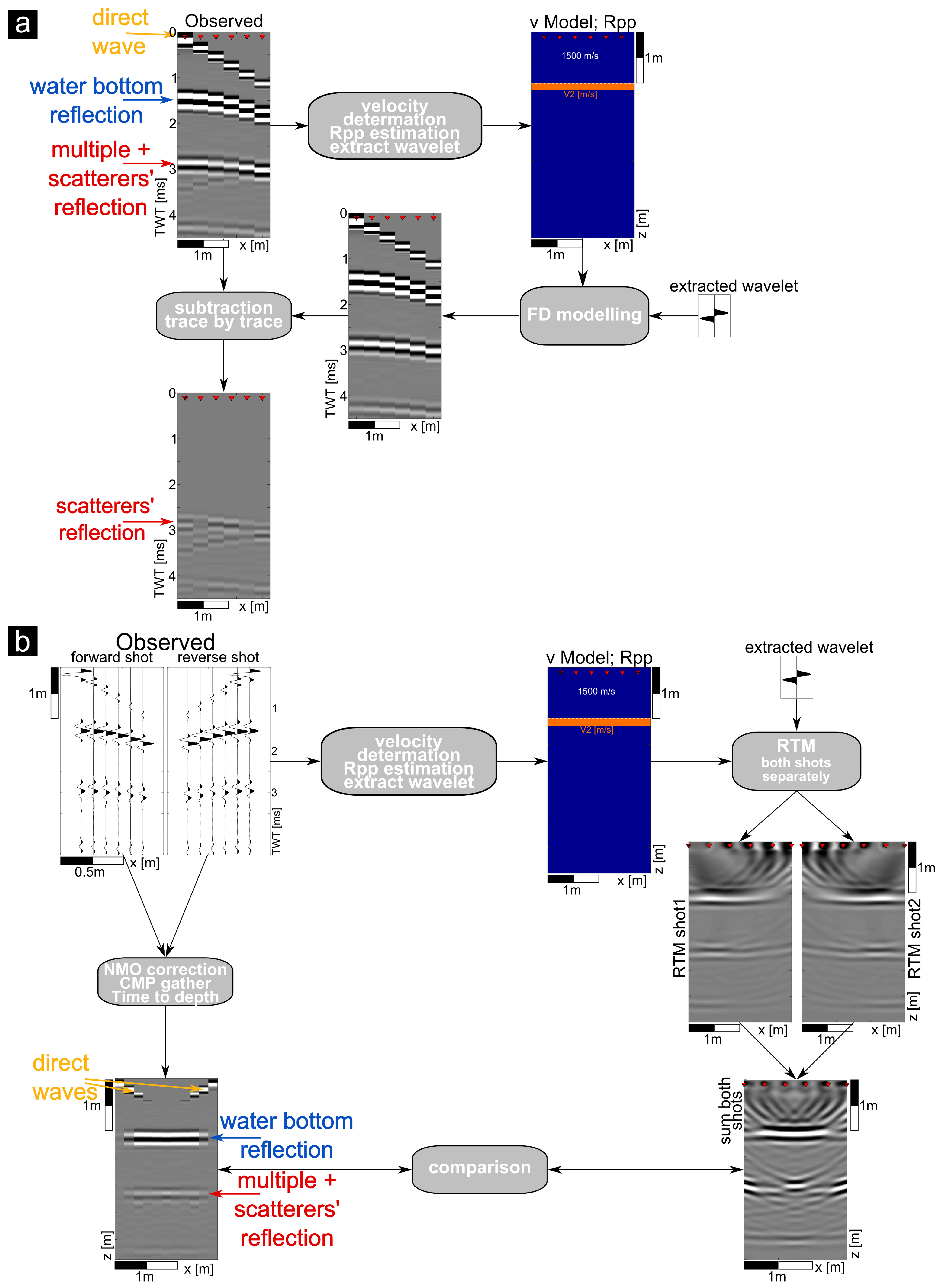
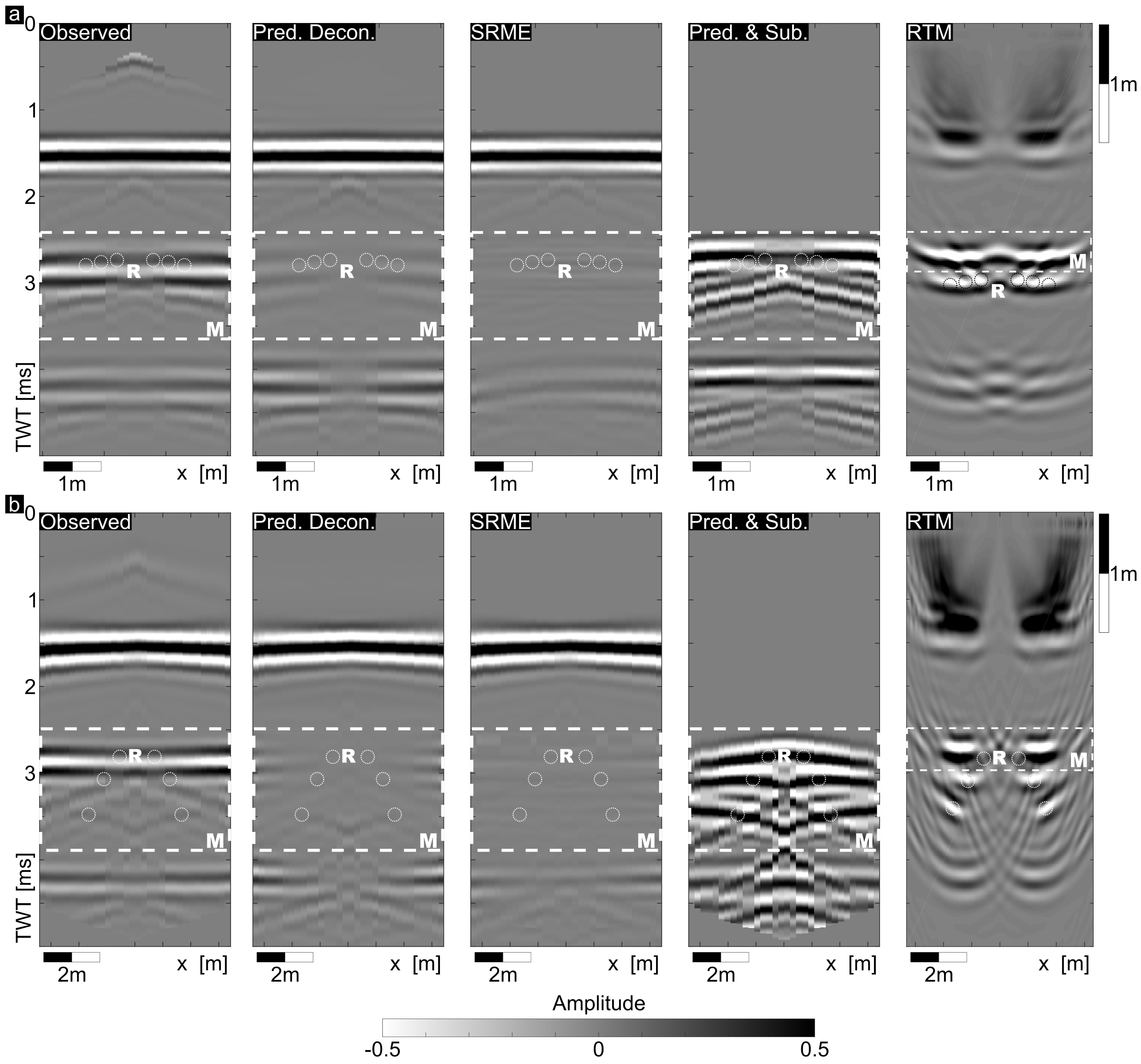
We evaluated two data driven methods using FD modeling of the acoustic wave equation for the attenuation of shallow water-layer multiples for multi- and constant-offset seismic data as recorded for archaeological prospection purposes. In particular, we analyzed the methods with respect to (1) their general applicability, (2) the influence of small uncertainties on the result, (3) traditional methods, and (4) the application to field data sets.
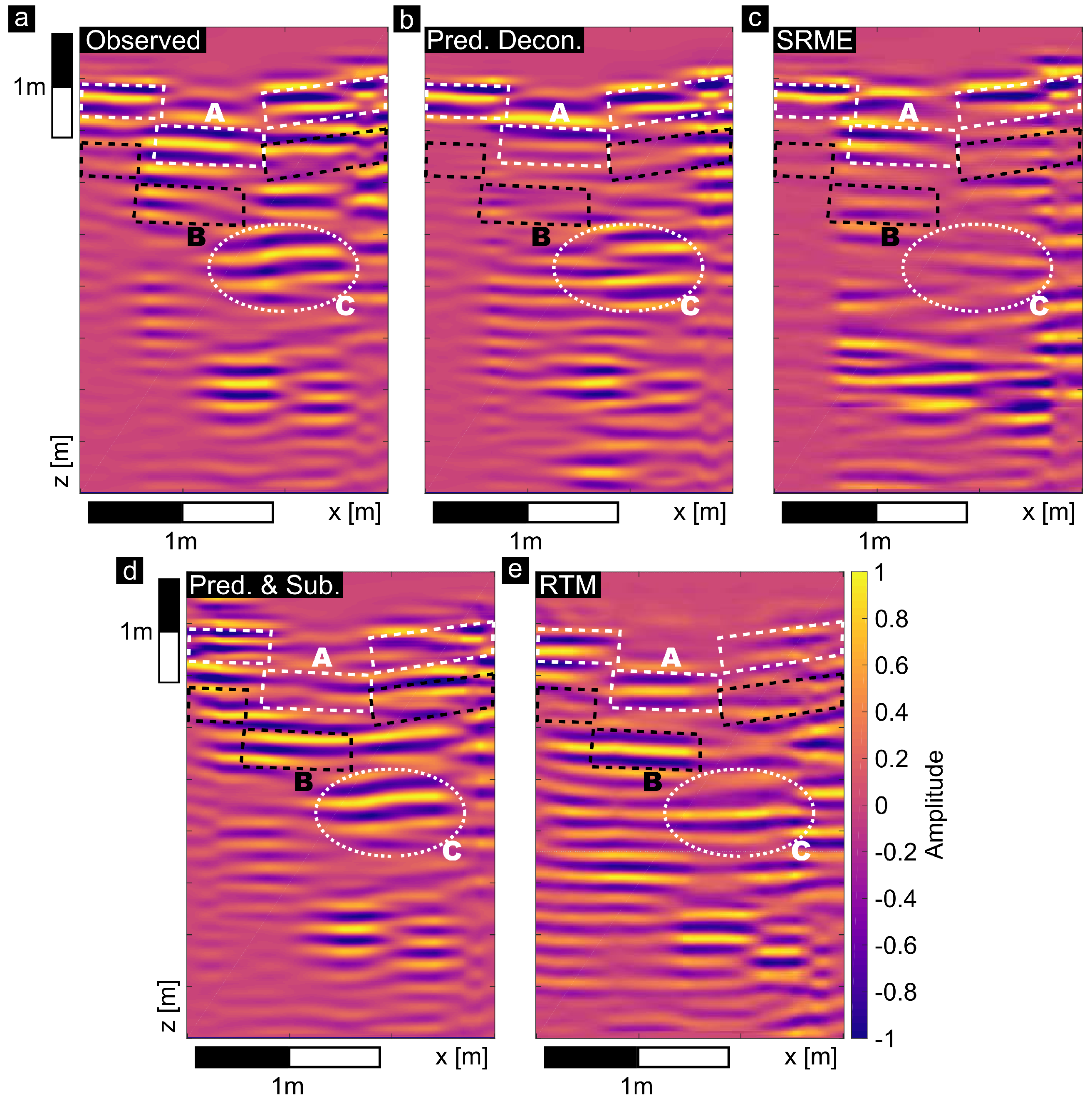
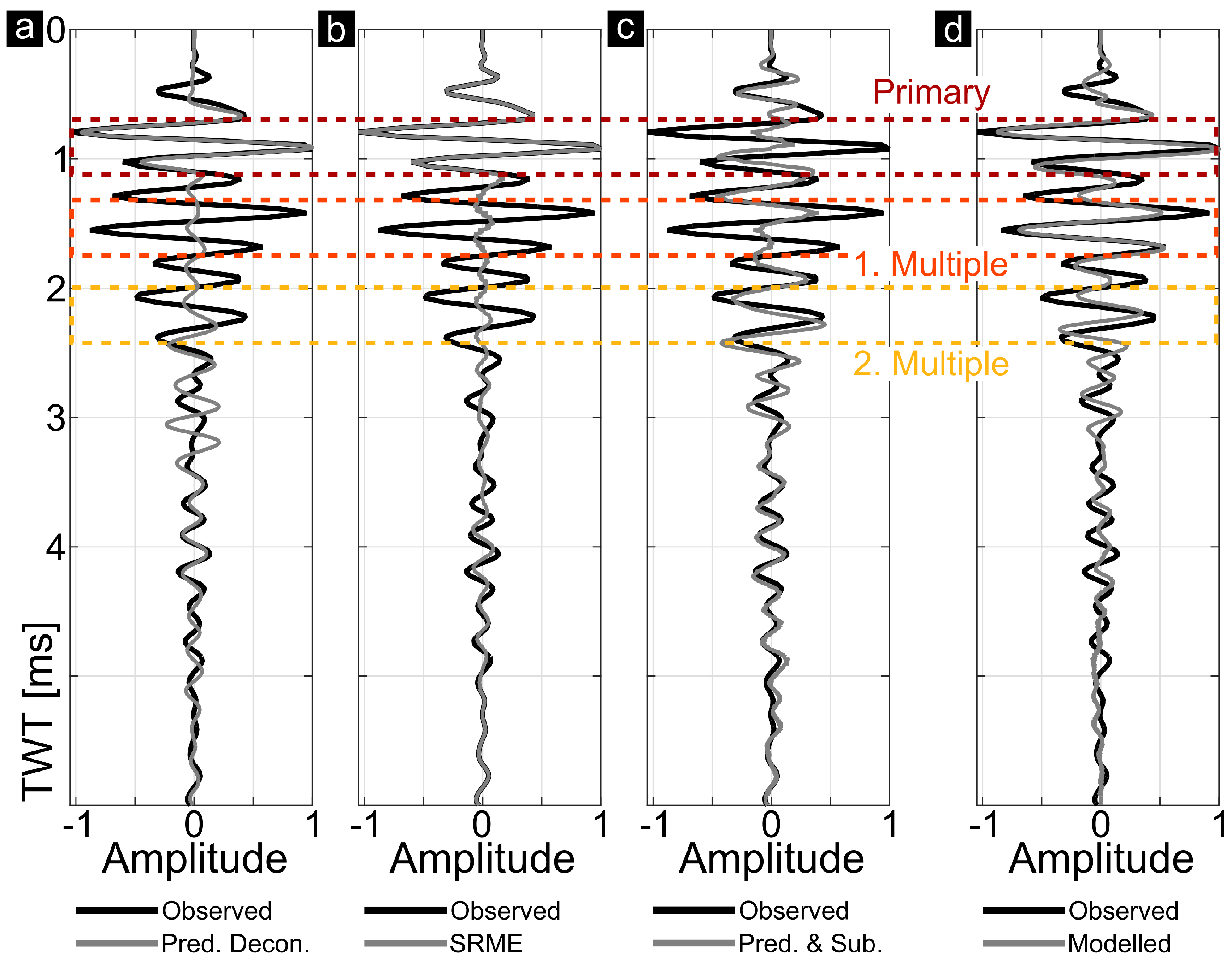
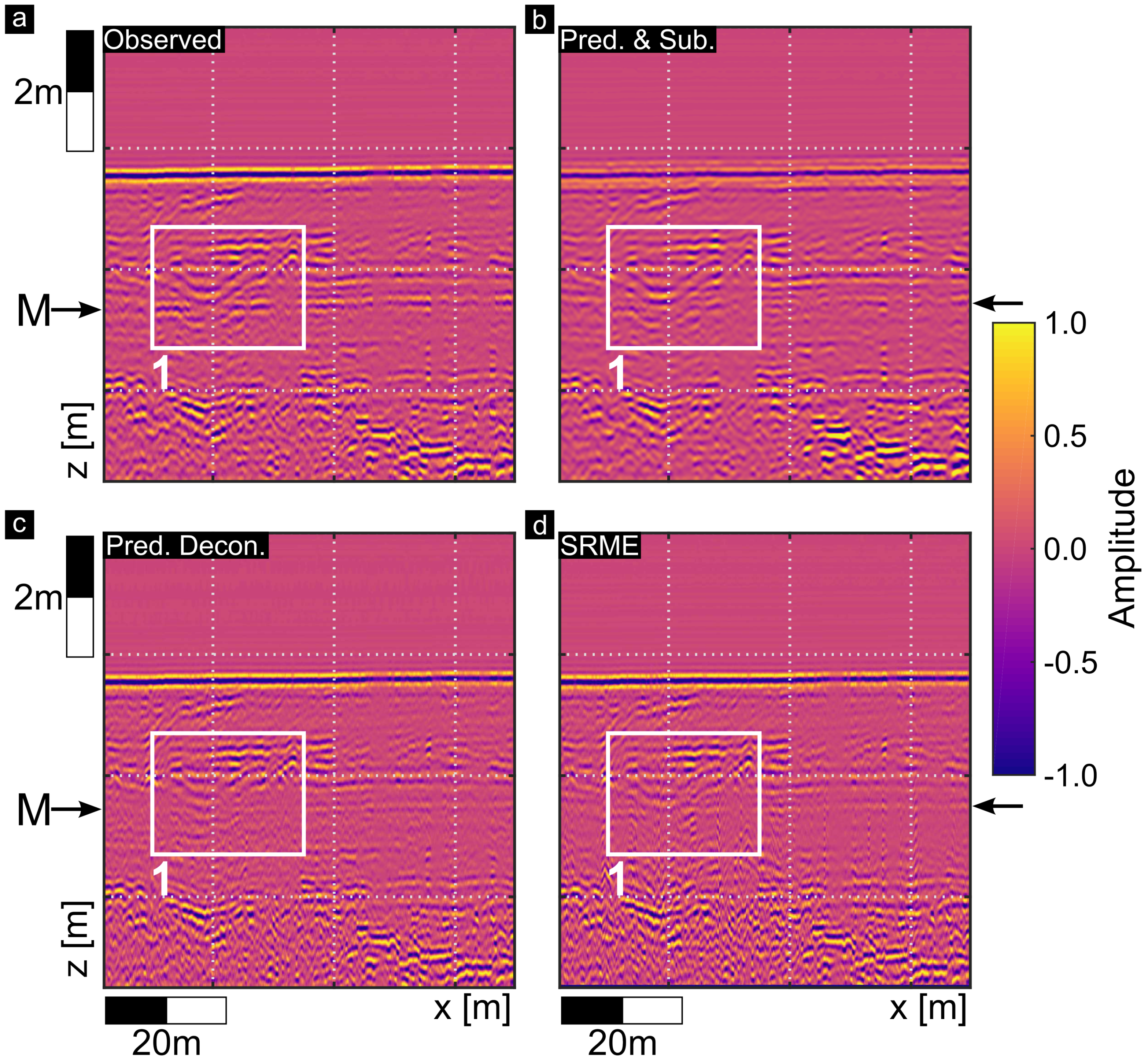
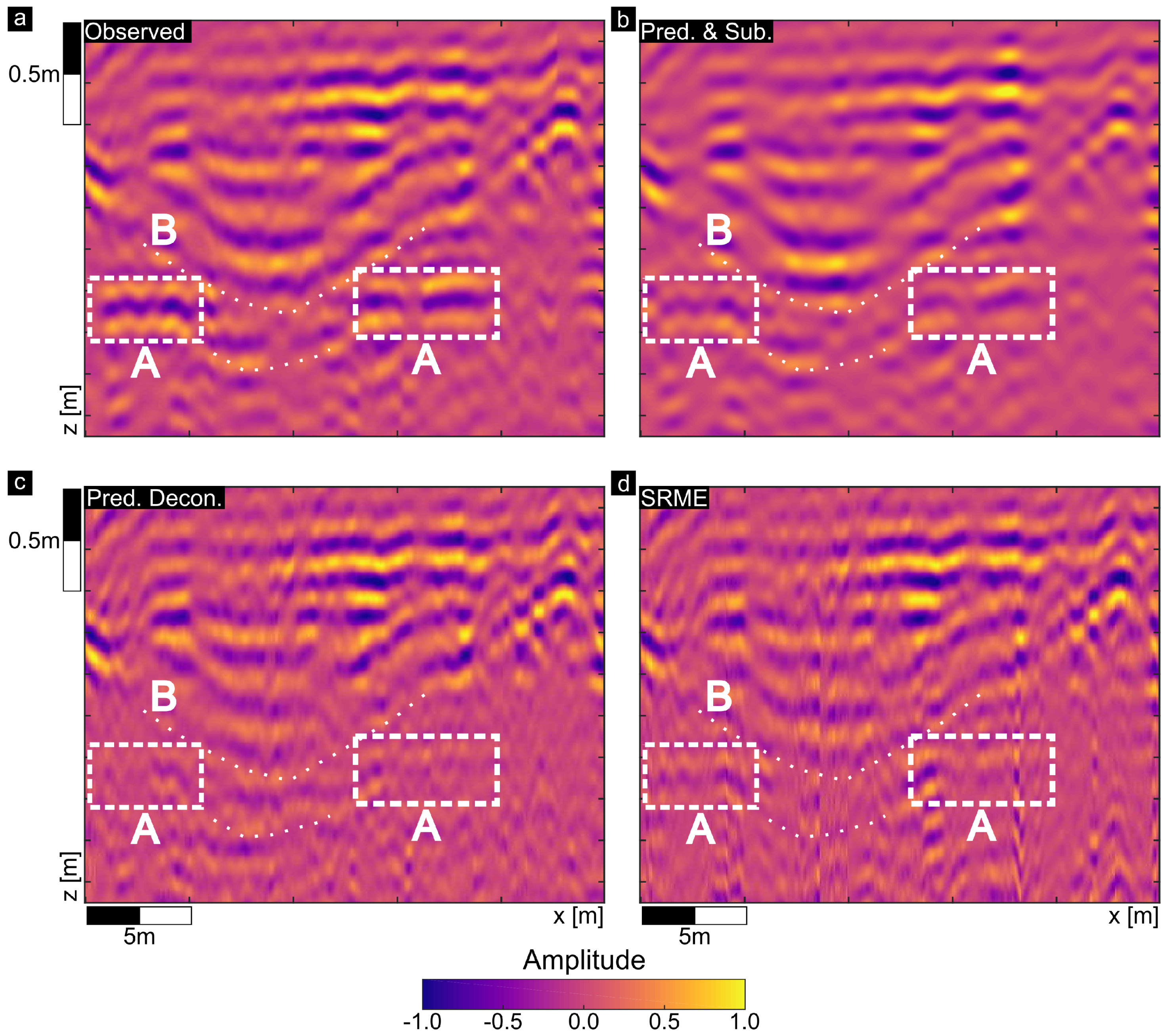
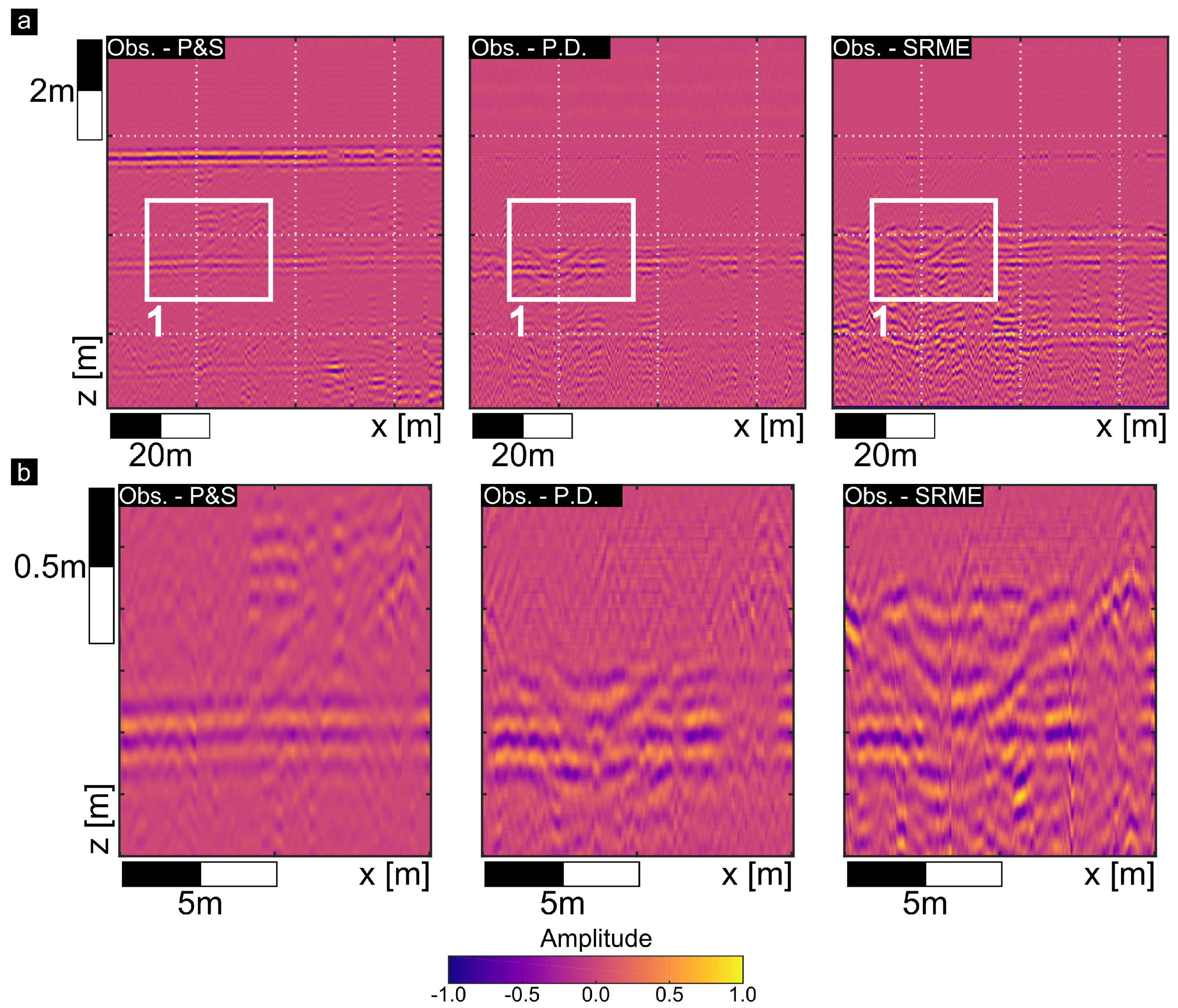
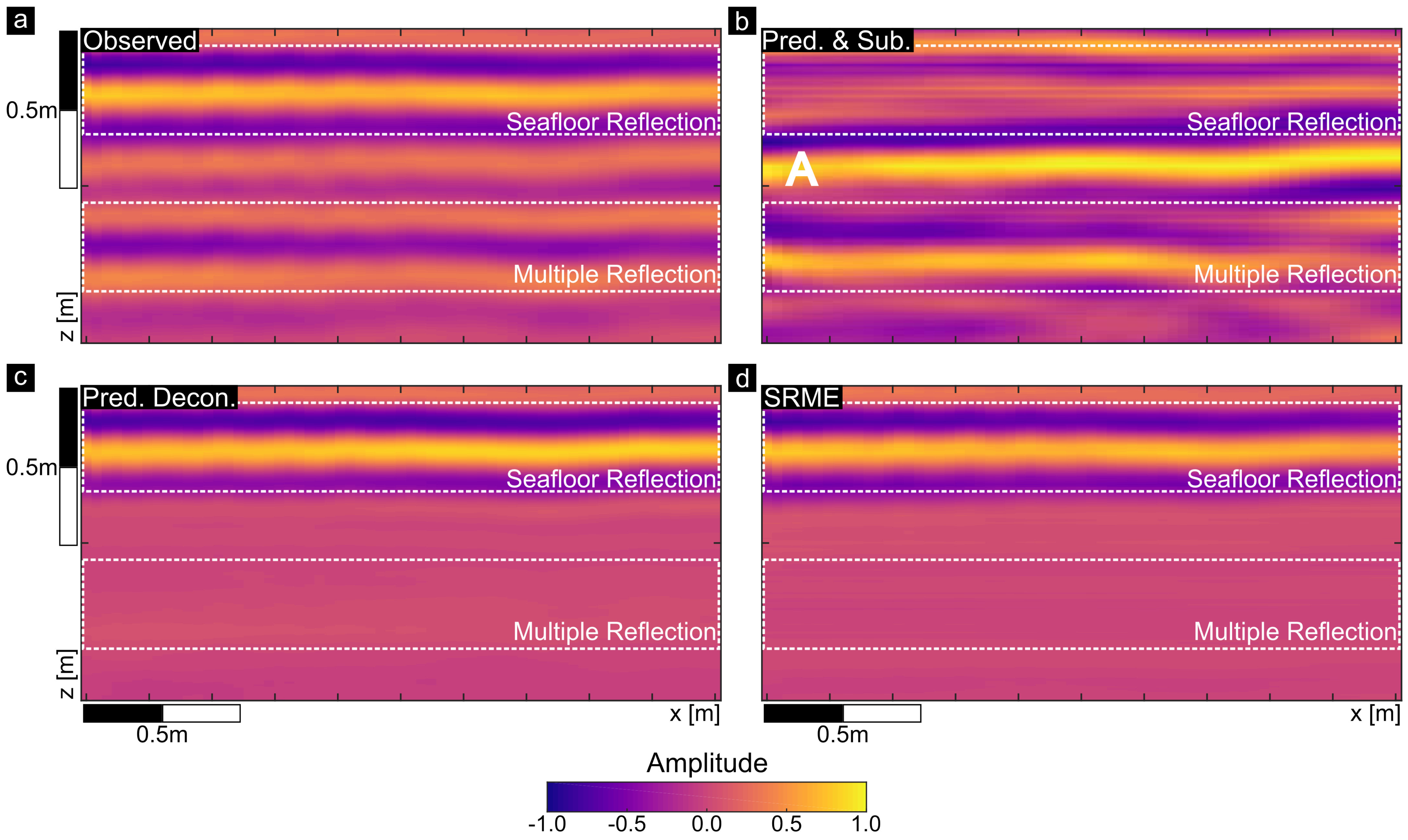
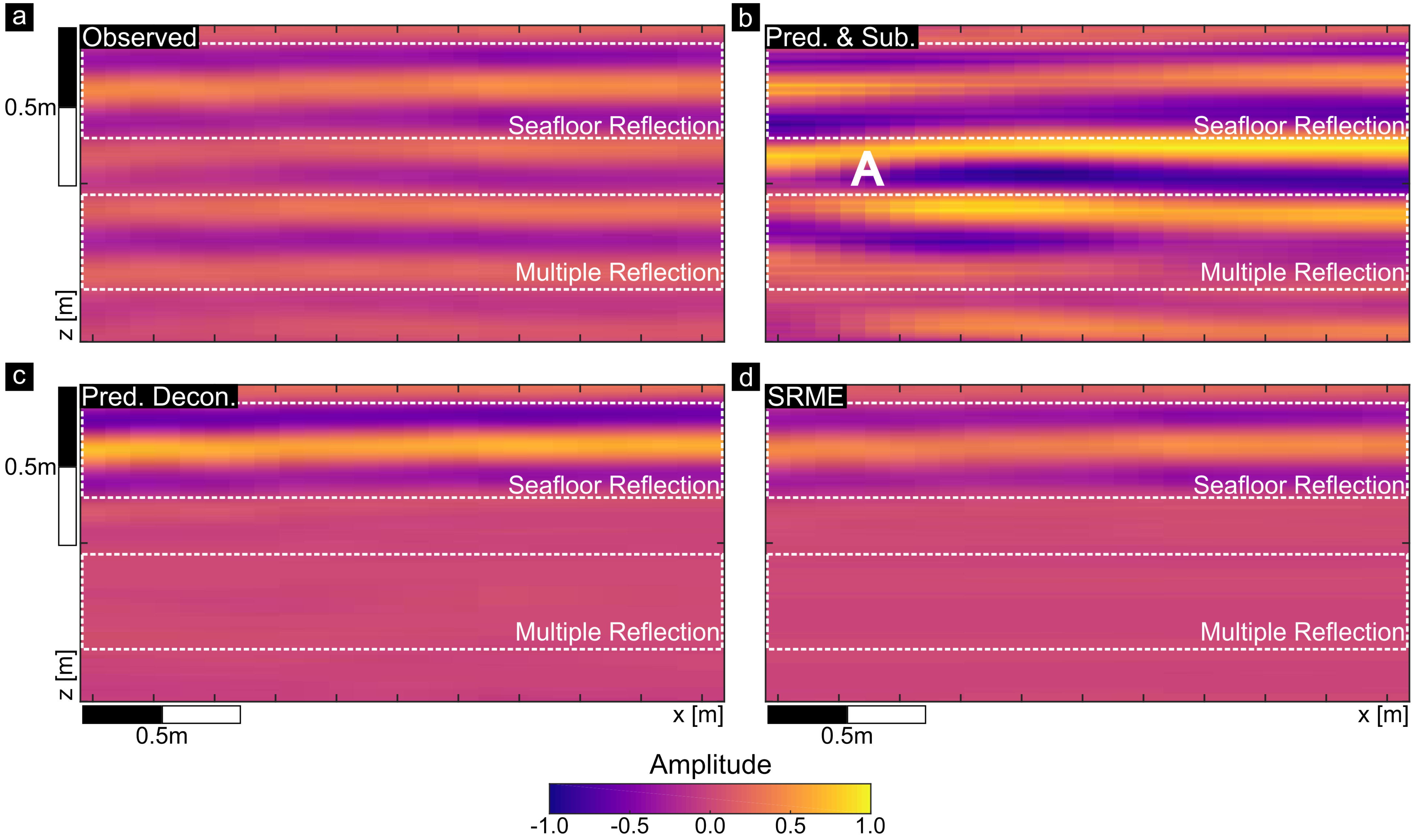
Concerning aspects (1) and (2), both evaluated methods yield satisfactory results concerning the enhancement of primary energy and the attenuation of multiple energy with a reduction of multiple energy of at least 60% and 80%, respectively, for the synthetic test cases by method A and B. Uncertainties in model determination lead to a poorer attenuation of multiple energy, but with an enhancement of primaries of more than 50%, the results are still satisfactory. Furthermore, small differences between the true and the estimated model can be corrected by post-processing of the modeled traces such as time shifts and amplitude adaption. Regarding questions (3) and (4), the evaluated methods A and B achieve comparable results concerning the multiple removal efficiency compared to common methods such as Predictive Deconvolution and SRME, which makes them an attractive tool to be applied in very shallow water demultiple processing. Concerning the enhancement of masked primary reflections, the traditional methods do not perform well as primary signal is attenuated and especially method A is able to achieve better results as the primary is not affected by the processing as it is in Predictive Deconvolution or SRME. This becomes particularly evident in the application to field data examples. The preparation time is approximately equivalent for all methods, but significant differences are given concerning the computational time of the multiple attenuation step. The higher computational costs in the application of method B can be justified by the resulting depth migrated section, which is of further advantage in archaeological investigations.
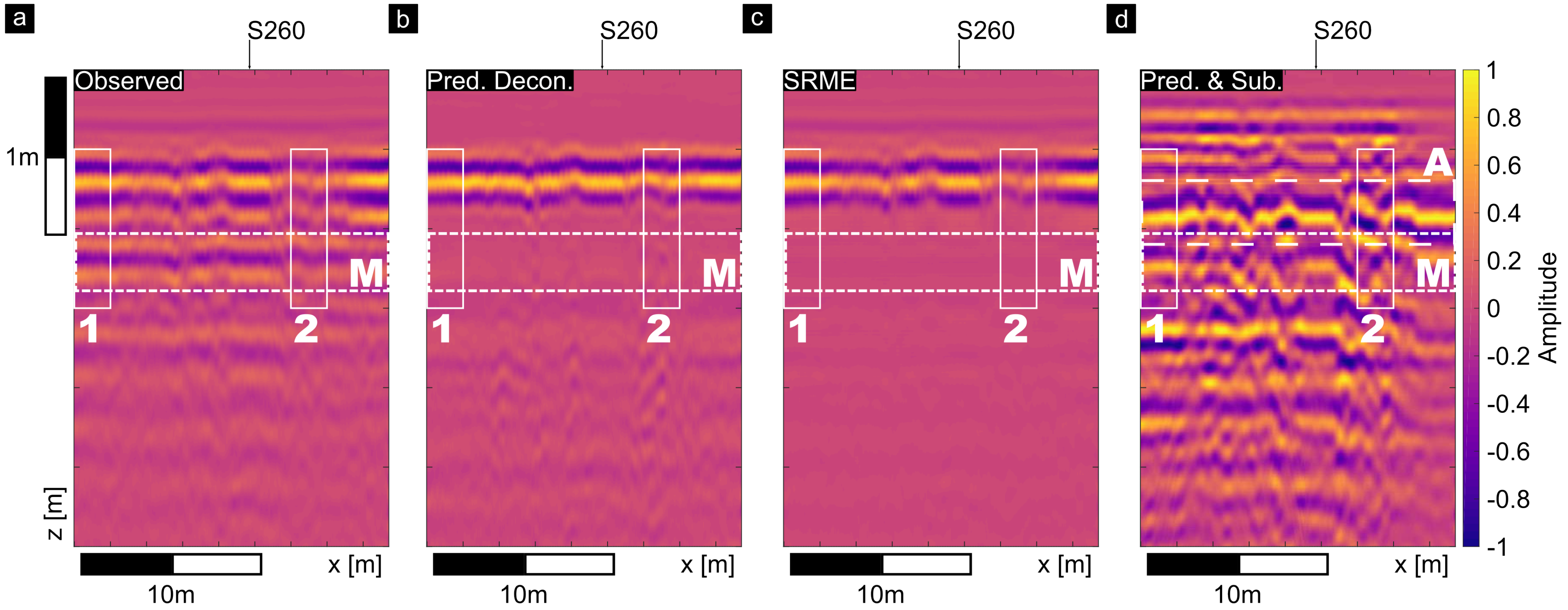
We conclude that the evaluated approaches, especially the “Prediction and Subtraction” approach, achieve very good multiple attenuation along with an enhancement of primaries when applied to data acquired in very shallow water using either the multi-offset or the constant-offset configuration. Both methods can be transferred to other marine seismic systems and achieve good results in circumstances where the traditional methods fail such as missing near-offsets in shallow water. The field data examples should be emphasized, where tested method A works significantly better than the traditional ones. Although not the ideal conditions are given, the multiples are effectively predicted and attenuated while primary signals are highlighted. In conclusion, this shows that the method is particularly suitable in shallow water applications.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















