
Use of GNSS Tropospheric Delay Measurements for the Parameterization and Validation of WRF High-Resolution Re-Analysis over the Western Gulf of Corinth, Greece: The PaTrop Experiment

 , , , ,
, , , ,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
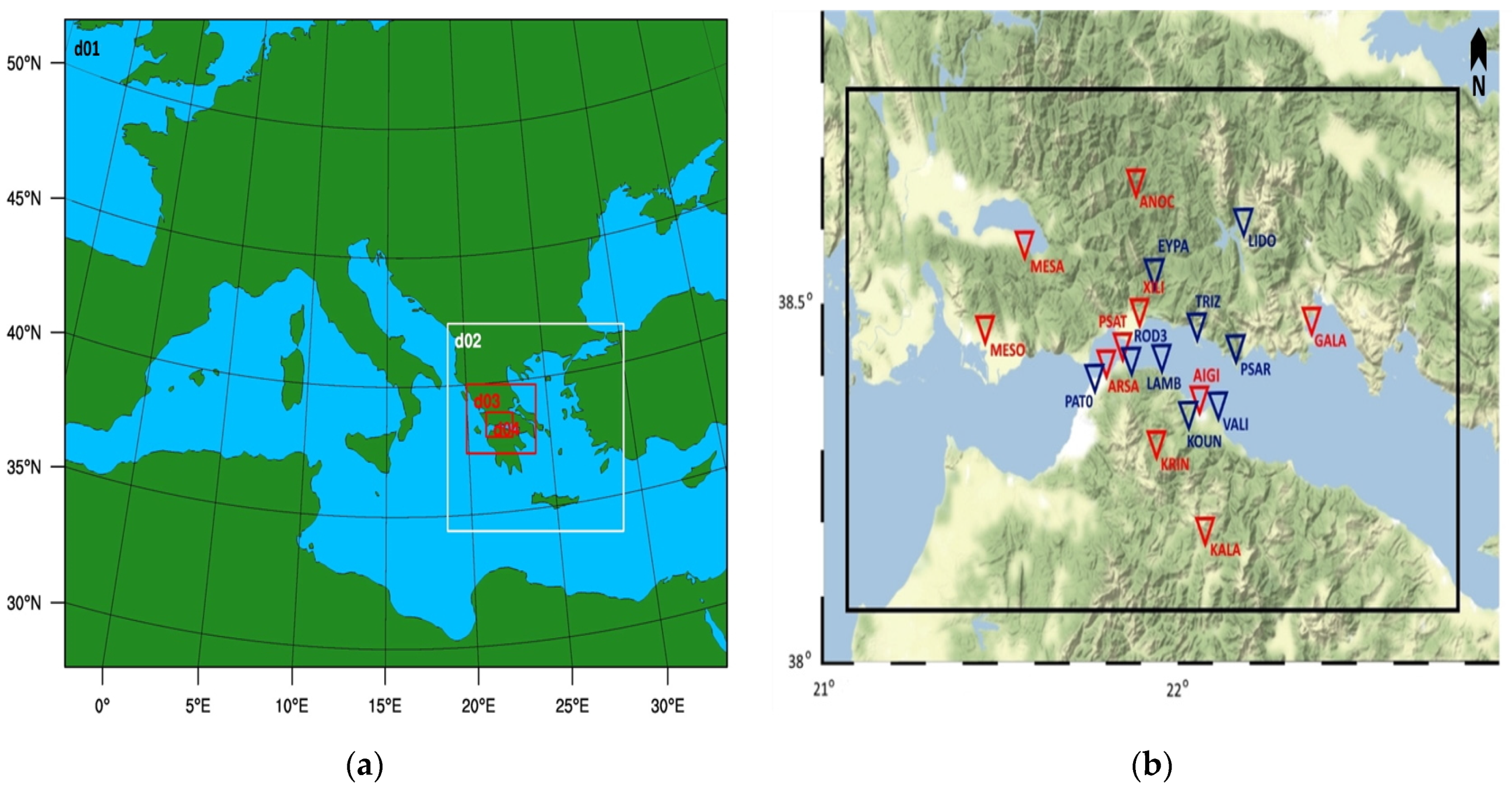
2.1. Description of the Study Area and Experimental Setup
2.2. Data Processing
2.3. Model Configuration and Parameterization of Physical Components
3. Results
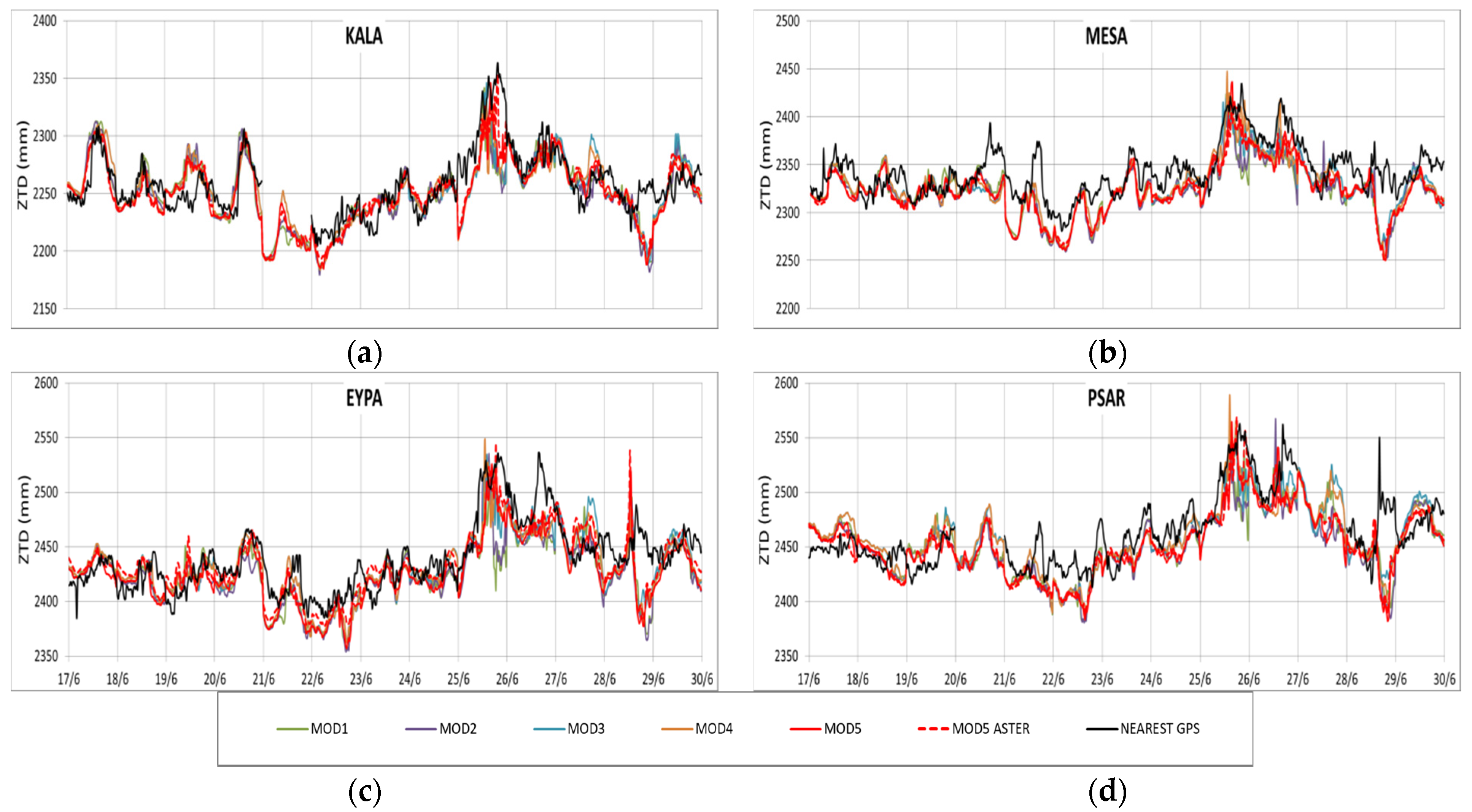
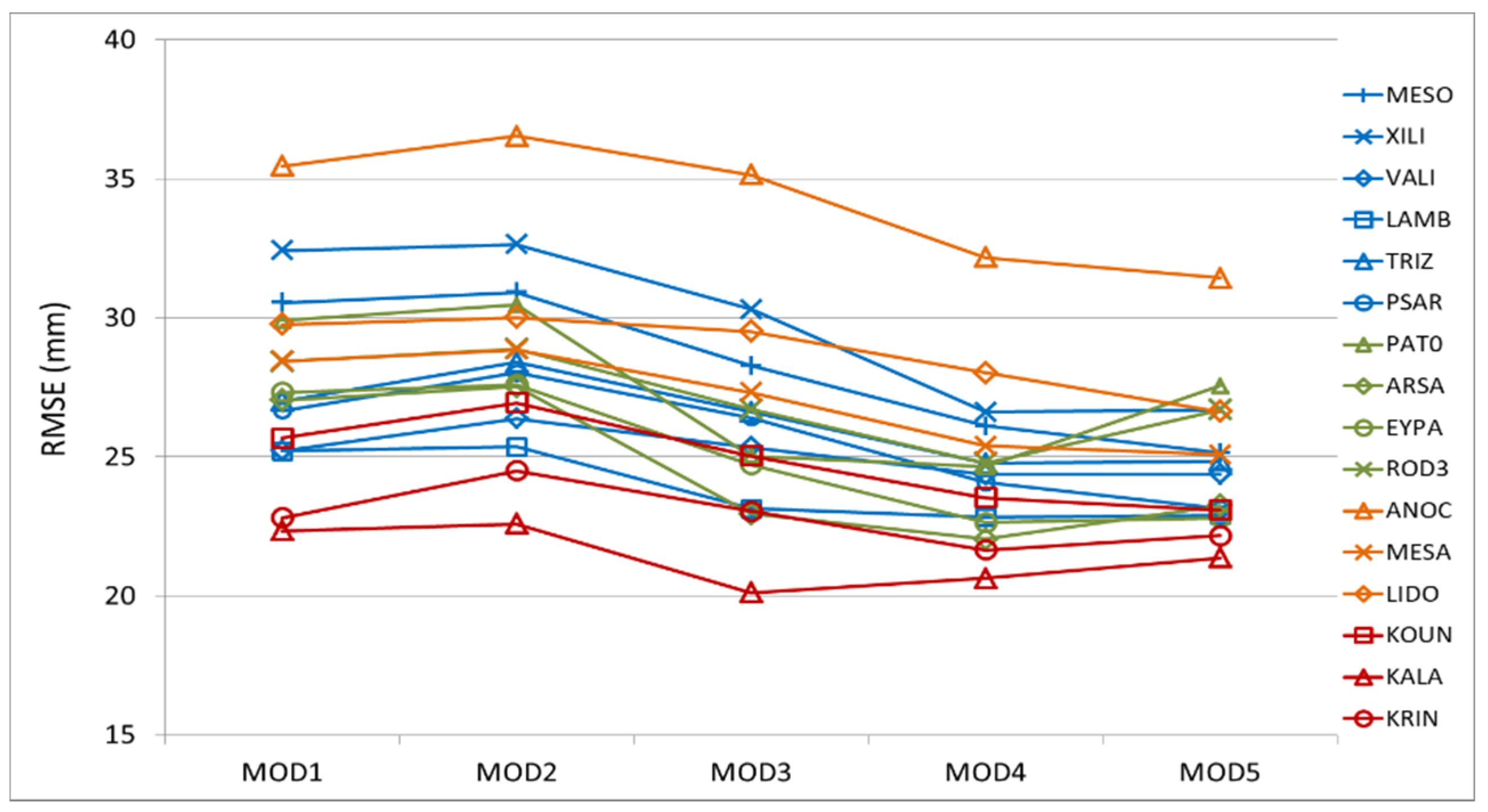
3.1. Parametric Analysis and Evaluation of WRF Schemes with GNSS Data
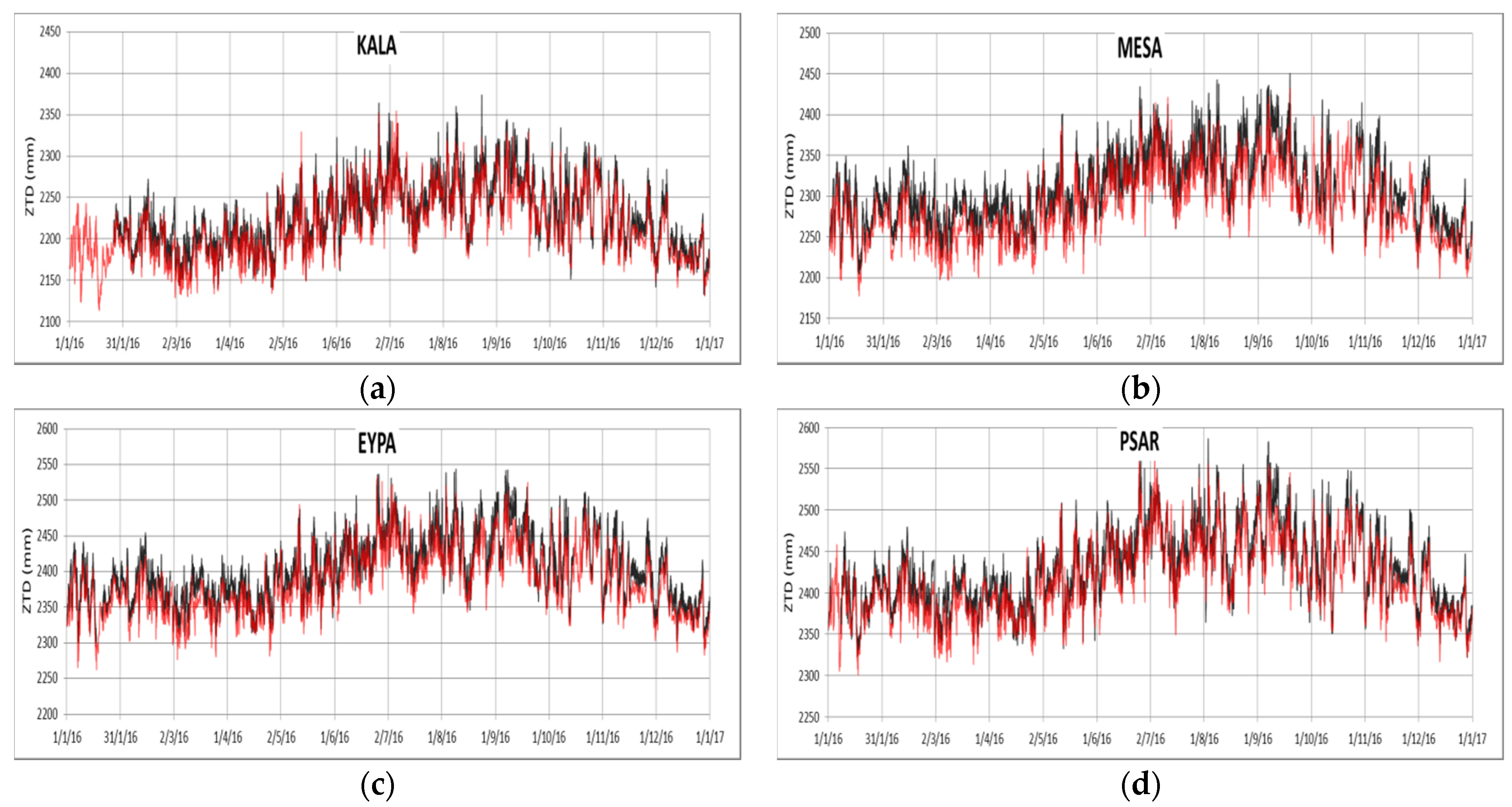
3.2. Validation of WRF Derived Tropospheric Delay Maps with GNSS ZTD Measurements for the PaTrop Period (January–December 2016)
- The Pearson correlation co-efficient R measures the extent to which two variables are linearly related. An R value of 1 means that the two variables are perfectly positively linearly related and that the points in the scatter plot lie exactly on a straight line (y = x). The R at the 19 locations, for the entire annual time series, ranges from 0.91 to 0.93, i.e., it is fairly uniform, indicating that the model’s variability matches the variability of the observed tropospheric delay about 90% of the time.
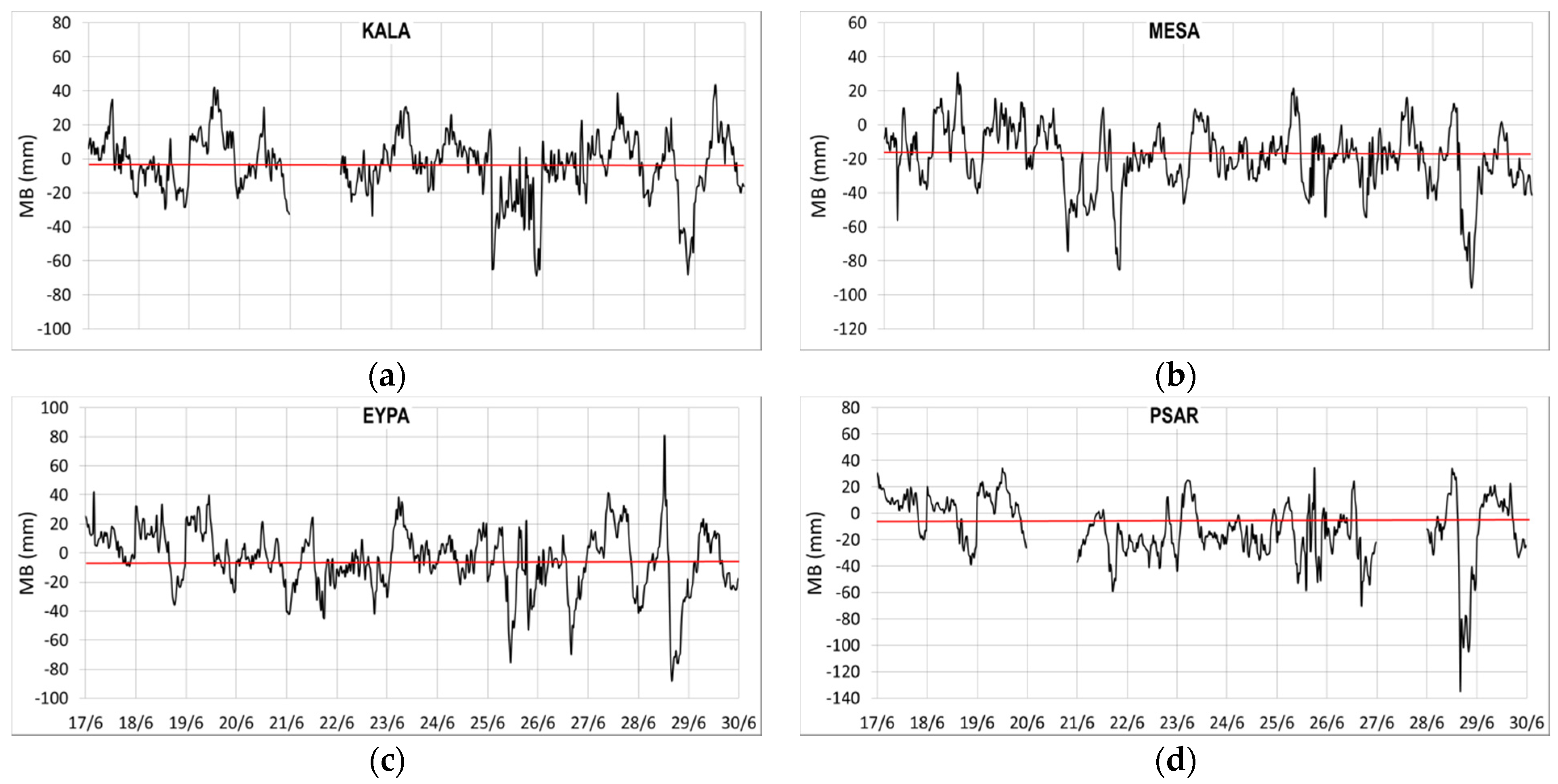
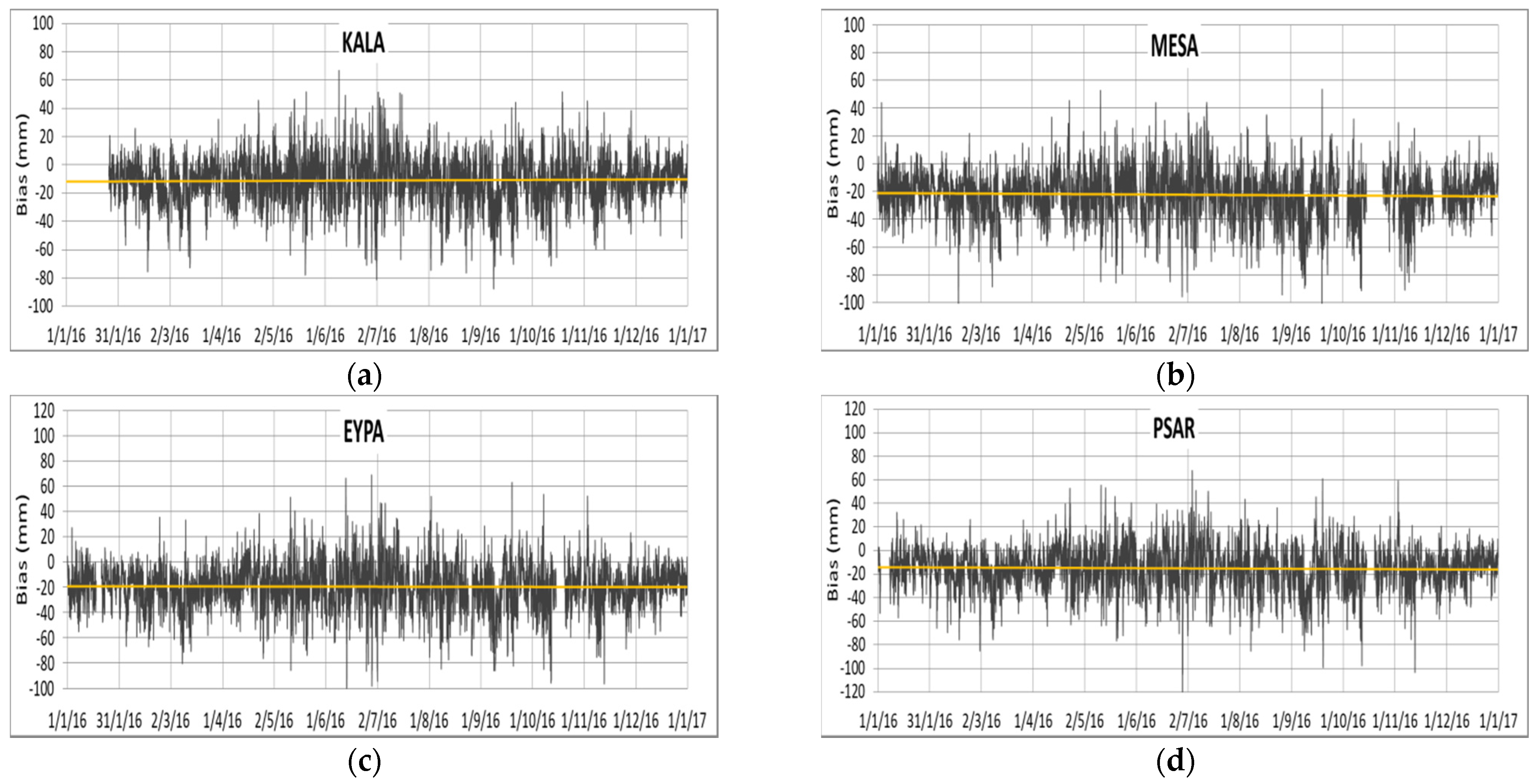
- Mean bias (MB) is a measure of the accuracy of the model’s ZTD output with respect to the observational dataset. Mean bias values for ZTD (GNSS-WRF), range from −11.1 mm (KALA station) to −28.2 mm (PSAT station), and indicate that the model tends to slightly underestimate the tropospheric ZTD as compared to the GNSS derived values. This finding is in-line with similar WRF evaluation studies [27,33] reporting consistently negative differences in relative humidity (a primary physical parameter in calculating the ZTD) with respect to ground observations in high-resolution WRF re-analysis scenarios, which are attributed to differences in vertical mixing strength and entrainment.
- Mean absolute bias (MAB) and root mean square error (RMSE) are both a measure of the absolute error between the two time series and are particularly useful, as the correction of the tropospheric component in InSAR interferograms is dependent on the model’s capability to produce high-resolution differential meteograms of tropospheric delay with the minimum absolute error (of the order of magnitude of one interferometric phase cycle π). Mean absolute bias values at the 19 locations range from 14.9 mm (KALA station) to 29.0 mm (PSAT station), with RMSE values covering a similar range.
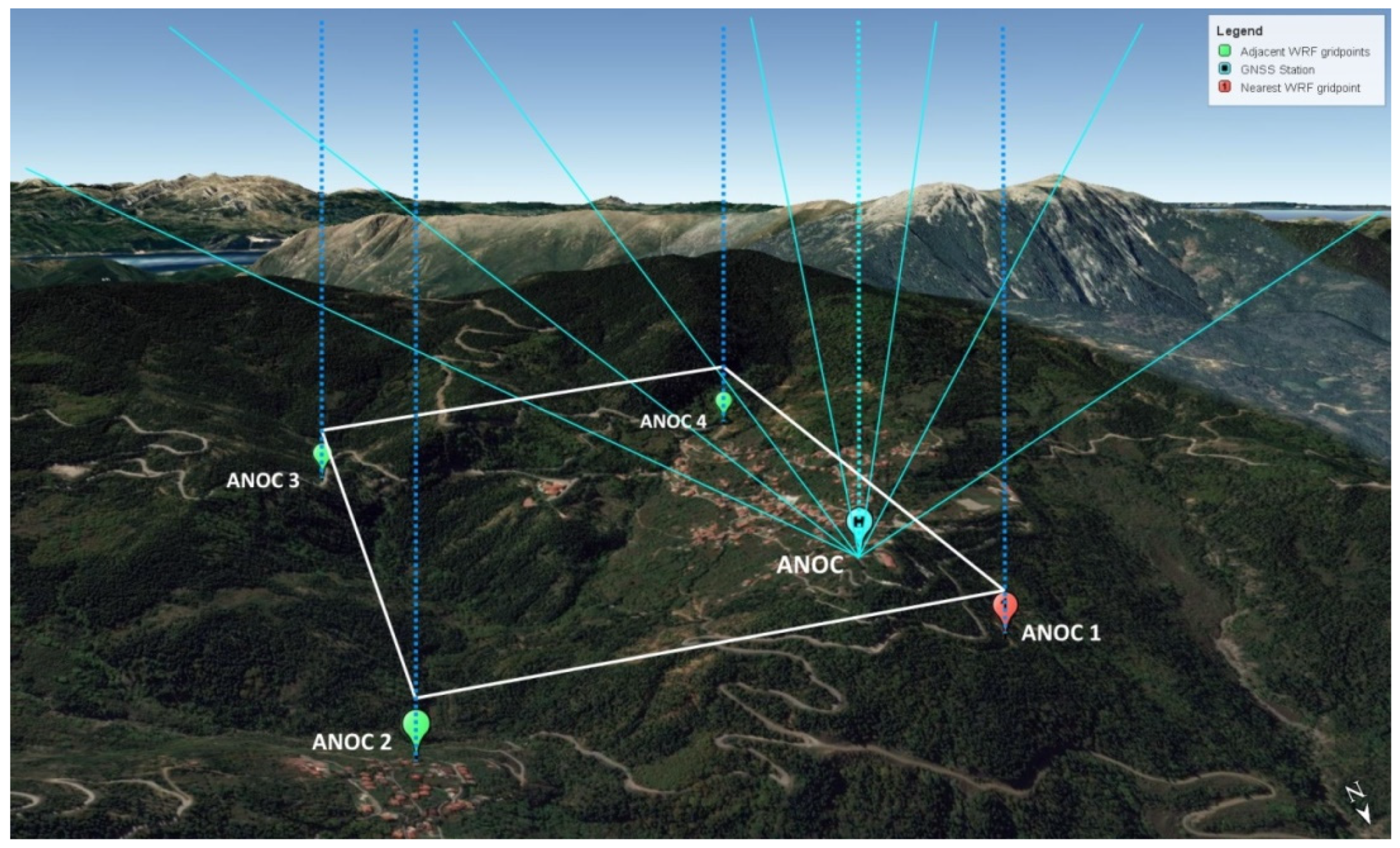
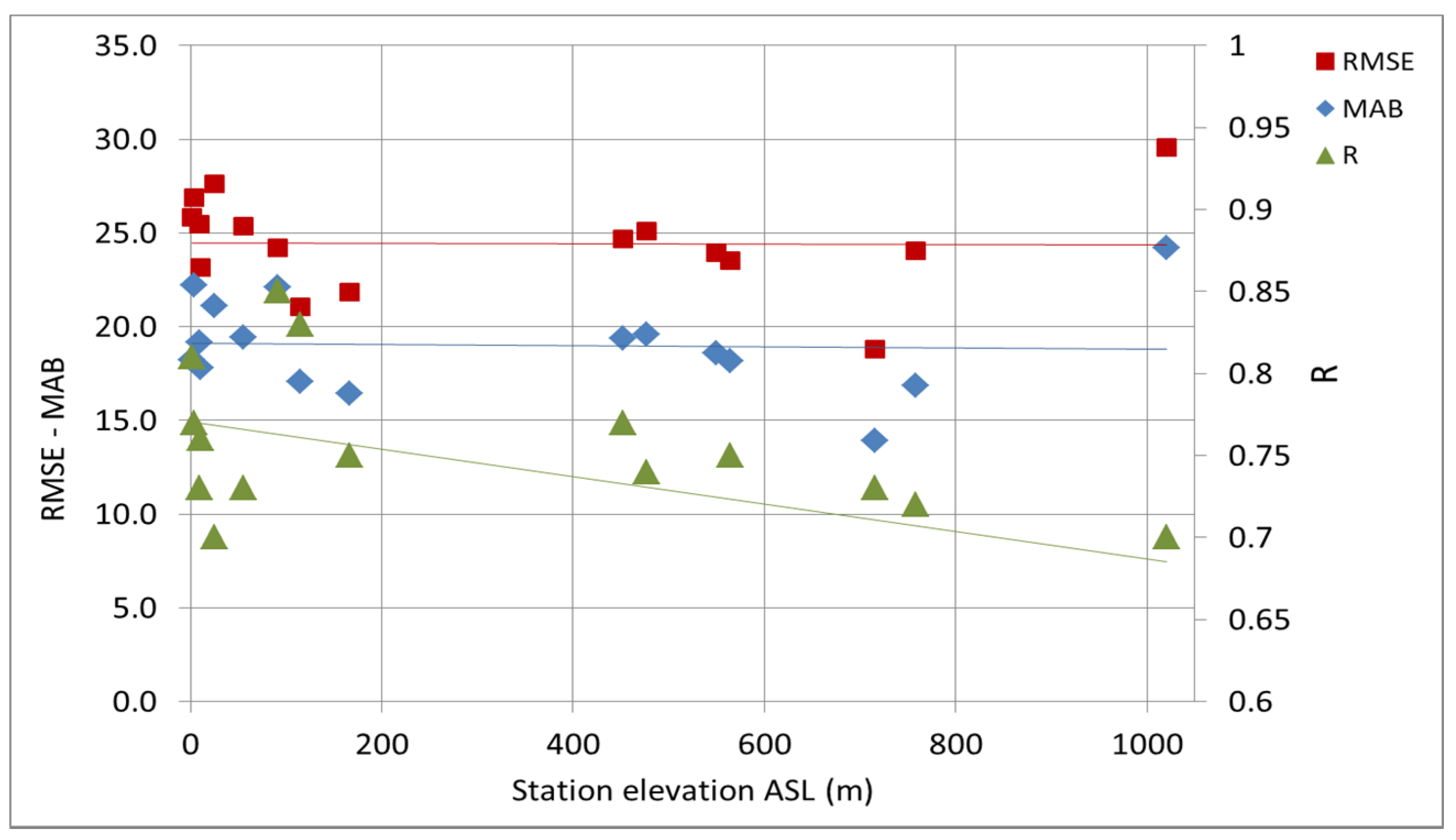
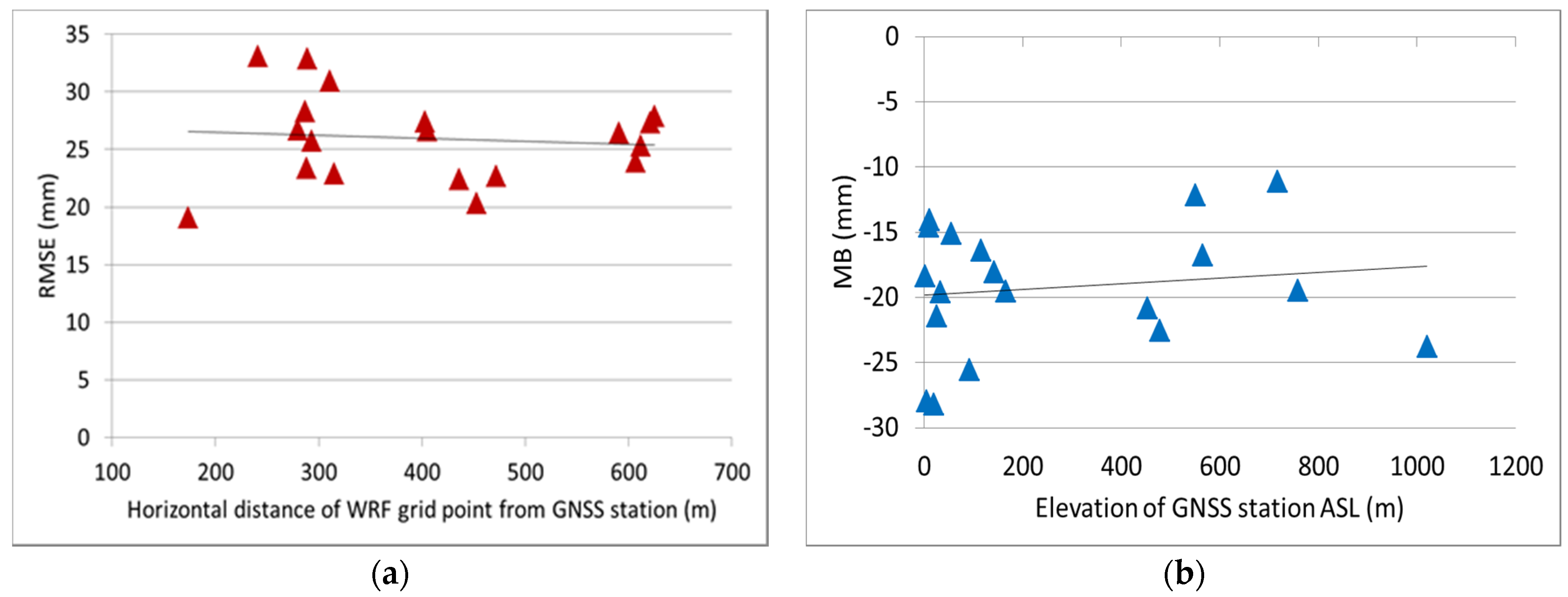
- As shown in Figure 9a, the RMSE seems to be independent of the horizontal distance s between the GNSS station and the nearest WRF grid point where the calculation of the predicted ZTD is performed. Therefore, we can conclude that the horizontal resolution of 1 km used for the WRF simulation is adequate.
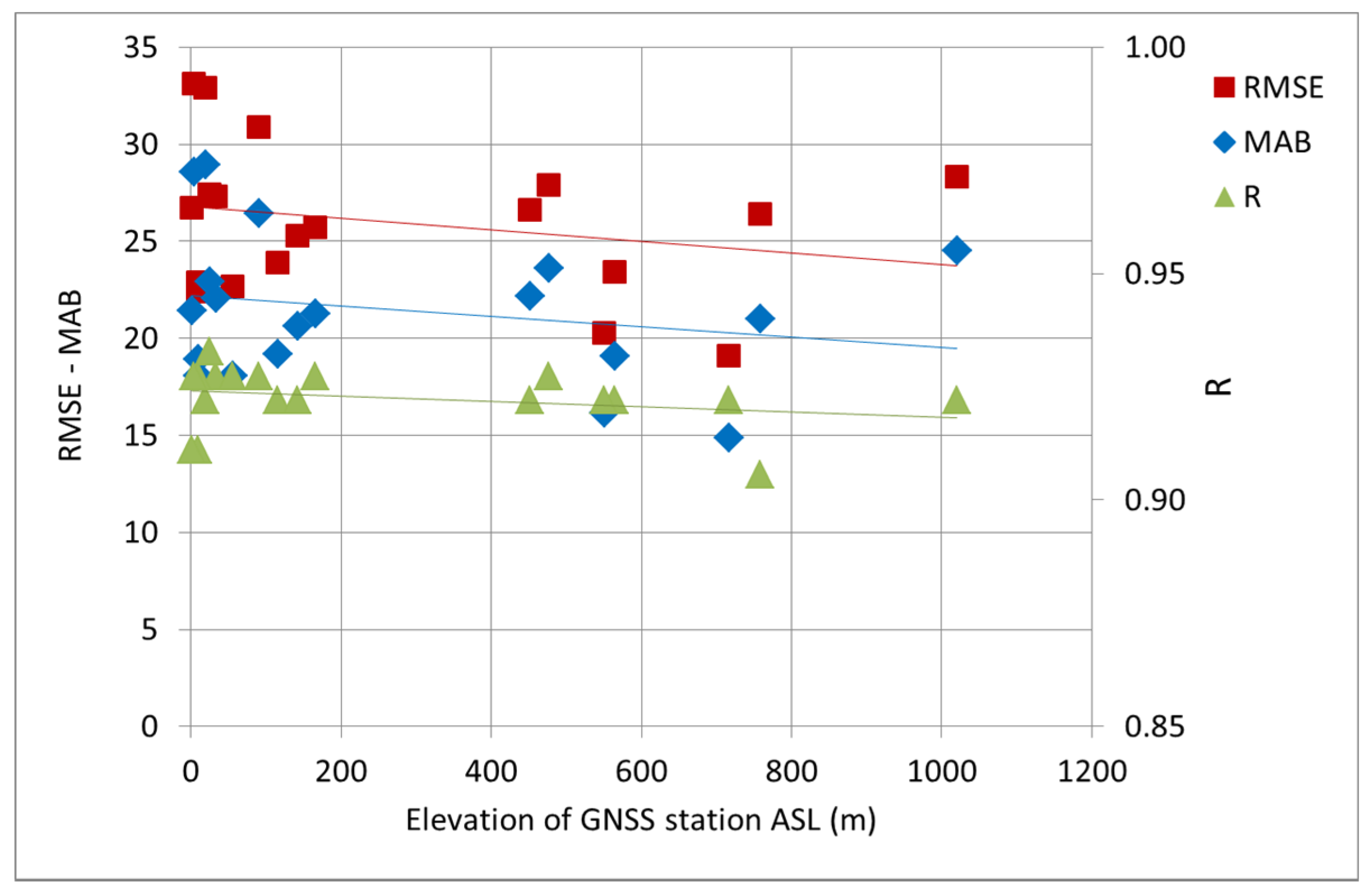
- With respect to station elevation h, a small reduction of MB in terms of its absolute value is evident with increasing h, as expected, due to smaller ZTD values (Figure 9b). Out of the 19 stations, the three highest mean negative biases are in XILI, PSAT and PAT0 (elevations ASL 4, 19 and 91 m), while the two lowest are in LIDO and KALA (550 and 716 m). The graphical summary of validation metrics for the entire period (Figure 10) also reveals that while R is fairly constant with increasing station elevation, MAB and RMSE exhibit a reduction.
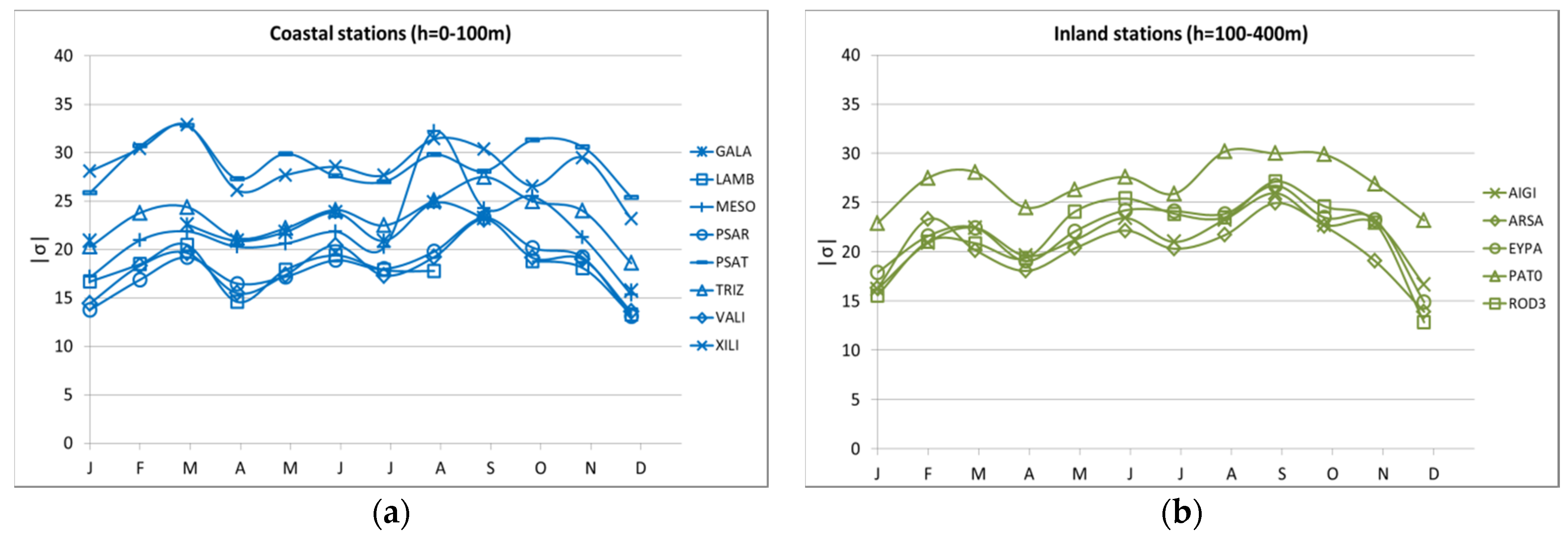
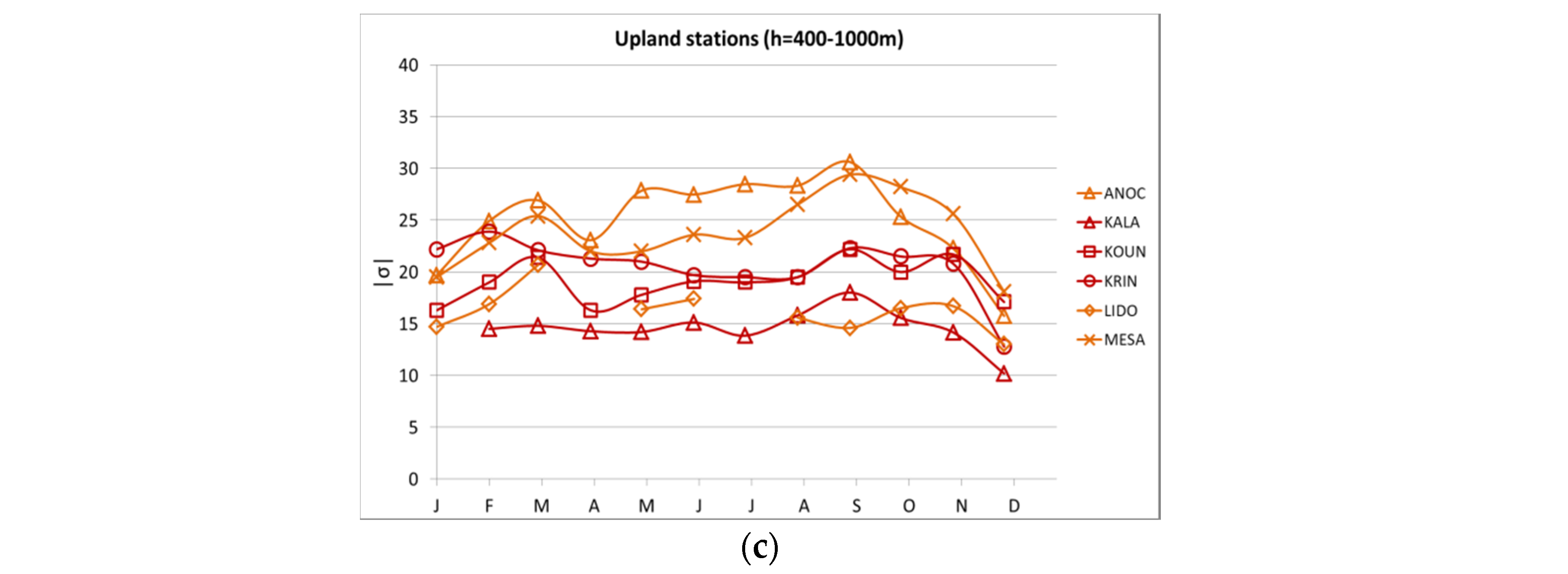
3.3. Seasonal Characteristics of WRF vs. GNSS ZTD and Evaluation of Model Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Skamarock, W.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.; Duda, M.G.; Huang, X.-Y.; Wang, W. A description of the advanced research WRF version 3. In NCAR Technical Note NCAR/TN-475 + STR; University Corporation for Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar] [CrossRef]
- Foster, J.; Brooks, B.; Cherubini, T.; Shacat, C.; Businger, S.; Werner, C.L. Mitigating atmospheric noise for InSAR using a high resolution weather model. Geophys. Res. Lett. 2006, 33, L16304. [Google Scholar] [CrossRef]
- Foster, J.; Kealy, J.; Cherubini, T.; Businger, S.; Lu, Z.; Murphy, M. The utility of atmospheric analyses for the mitigation of artifacts in InSAR. J. Geophys. Res. Solid Earth 2013, 118, 748–758. [Google Scholar] [CrossRef] [Green Version]
- Puysségur, B.; Michel, R.; Avouac, J.P. Tropospheric phase delay in interferometric synthetic aperture radar estimated from meteorological model and multispectral imagery. J. Geophys. Res. 2007, 112, B05419. [Google Scholar] [CrossRef] [Green Version]
- Wadge, G.; Zhu, M.; Holley, R.; James, I.; Clark, P.; Wang, C.; Woodage, M. Correction of Atmospheric Delay Effects in Radar Interferometry Using a Nested Mesoscale Atmospheric Model. J. Appl. Geophys. 2010, 72, 141–149. [Google Scholar] [CrossRef]
- Eff-Darwich, A.; Perez, J.; Fernandez, J.; Garcia-Lorenzo, B. Using a mesoscale meteorological model to reduce the effect of tropospheric water vapour from DInSAR data: A case study for the island of Tenerife. Pure Appl. Geophys. 2012, 169, 1425–1441. [Google Scholar] [CrossRef]
- Kinoshita, Y.; Furuya, M.; Hobiger, T.; Ichikawa, R. Are numerical weather model outputs helpful to reduce tropospheric delay signals in InSAR data? J. Geod. 2013, 87, 267–277. [Google Scholar] [CrossRef] [Green Version]
- Bekaert, D.P.S.; Walters, R.J.; Wright, T.J.; Hooper, A.; Parker, D.J. Statistical comparison of InSAR tropospheric correction techniques. Remote Sens. Environ. 2015, 170, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Delacourt, C.; Briole, P.; Achache, J.A. Tropospheric corrections of SAR interferograms with strong topography. Appl. Etna. Geophys. Res. Lett. 1998, 25, 2849–2852. [Google Scholar] [CrossRef]
- Webley, P.W.; Bingley, R.M.; Dodson, A.H.; Wadge, G.; Waugh, S.J.; James, I.N. Atmospheric water vapour correction to InSAR surface motion measurements on mountains: Results from a dense GPS network on Mount Etna. Phys. Chem. Earth 2002, 27, 363–370. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.; Cross, P.; Fielding, E. Interferometric synthetic aperture radar (InSAR) atmospheric correction: GPS, Moderate Resolution Imaging Spectroradiometer (MODIS), and InSAR integration. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef]
- Löfgren, J.; Björndahl, F.; Moore, A.; Webb, F.; Fielding, E.; Fishbein, E. Tropospheric correction for InSAR using interpolated ECMWF data and GPS Zenith Total Delay from the Southern California Integrated GPS Network. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4503–4506. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Fielding, E.; Cross, P.; Preusker, R. Advanced InSAR atmospheric correction: MERIS/MODIS combination and stacked water vapour models. Int. J. Remote Sens. 2009, 30, 3343–3363. [Google Scholar] [CrossRef]
- Walters, R.; Elliott, J.; Li, Z.; Parsons, B. Rapid strain accumulation on the Ashkabad fault (Turkmenistan) from atmosphere-corrected InSAR. J. Geophys. Res. Atmos. 2013, 118, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Li, Z.; Ding, X.; Feng, G.; Hu, D.; Long, J.; Yin, H.; Yang, E. Correcting atmospheric effects in ASAR interferogram with MERIS integrated water vapor data. Chin. J. Geophys. 2010, 53, 1073–1084. [Google Scholar]
- Elliott, J.; Biggs, J.; Parsons, B.; Wright, T. InSAR slip rate determination on the Altyn Tagh Fault, northen Tibet, in the presence of topographically correlated atmopsheric delays. Geophys. Res. Lett. 2008, 35, L12309. [Google Scholar] [CrossRef] [Green Version]
- Cavalié, O.; Lasserre, C.; Doin, M.; Peltzer, G.; Sun, J.; Xu, X.; Shen, Z. Measurement of interseismic strain across the Haiyuan fault (Gansu, China) by InSAR. Earth and Plan. Sci. Lett. 2008, 275, 246–257. [Google Scholar] [CrossRef]
- Lin, Y.N.; Simons, M.; Hetland, E.A.; Muse, P.; DiCaprio, C.A. Multiscale approach to estimating topographically correlated propagation delays in radar interferograms. Geochem. Geophys. Geosyst. 2010, 11, Q09002. [Google Scholar] [CrossRef]
- Doin, M.P.; Lasserre, C.; Peltzer, G.; Cavali, O.; Doubre, C. Corrections of stratified tropospheric delays in SAR interferometry: Validation with global atmospheric models. J. Appl. Geophys. 2009, 69, 35–50. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic InSAR tropospheric phase delay corrections from global meteorological reanalysis data. Geophys. Res. Lett. 2011, 38, L17311. [Google Scholar] [CrossRef] [Green Version]
- Jolivet, R.; Agram, P.S.; Lin, N.Y.; Simons, M.; Doin, M.P.; Peltzer, G.; Li, Z. Improving InSAR geodesy using Global Atmospheric Models. J. Geophys. Res. Solid Earth 2014, 119, 2324–2341. [Google Scholar] [CrossRef]
- Yun, Y.; Zeng, Q.; Green, B.W.; Zhang, F. Mitigating atmospheric effects in InSAR measurements through high-resolution data assimilation and numerical simulations with a weather prediction model. Int. J. Remote Sens. 2015, 36, 2129–2147. [Google Scholar] [CrossRef]
- Briole, P.; Rigo, A.; Lyon-Caen, H.; Ruegg, J.C.; Papazissi, K.; Mitsakaki, C.; Balodimou, A.; Veis, G.; Hatzfeld, D.; Deschamps, A. Results from repeated Global Positioning System surveys between 1990 and 1995. J. Geophys. Res. 2000, 105, 25605–25625. [Google Scholar] [CrossRef] [Green Version]
- Avallone, A.; Briole, P.; Agatza-Balodimou, A.M.; Billiris, H.; Charade, O.; Mitsakaki, C.; Nercessian, A.; Papazissi, K.; Paradissis, D.; Veis, G. Analysis of eleven years of deformation measured by GPS in the Corinth Rift Laboratory area. C.R. Geosci. 2004, 336, 301–312. [Google Scholar] [CrossRef] [Green Version]
- Kioutsioukis, I.; De Meij, A.; Jakobs, H.; Katragkou, E.; Vinuesa, J.F.; Kazantzidis, A. High resolution WRF ensemble forecasting for irrigation: Multi-variable evaluation. Atmos. Res. 2015, 167, 156–174. [Google Scholar] [CrossRef]
- Garcia-Diez, M.; Fermandez, J.; Vautard, R. An RCM multi-physics ensemble over Europe: Multi-variable evaluation to avoid error compensation. Clim. Dyn. 2015, 45, 3141–3156. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Businger, S.; Herring, T.; Rocken, C.; Anthes, R.; Ware, R. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Elgered, G.; Davis, J.L.; Herring, T.A.; Shapiro, I.I. Geodesy by radio interferometry: Water vapor radiometry for estimation of the wet delay. J. Geophys. Res. 1991, 96, 6541–6555. [Google Scholar] [CrossRef]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Mooney, P.A.; Mulligan, F.J.; Fealy, R. Evaluation of the sensitivity of the weather research and forecasting model to parameterization schemes for regional climates of Europe over the period 1990–95. J. Clim. 2013, 26, 1002–1017. [Google Scholar] [CrossRef] [Green Version]
- Kotlarski, S.; Keuler, K.; Christensen, O.B.; Colette, A.; Déqué, M.; Gobiet, A.; Goergen, K.; Jacob, D.; Lüthi, D.; van Meijgaard, E.; et al. Regional climate modeling on European scales: A joint standard evaluation of the EURO-CORDEX RCM ensemble. Geosci. Model Dev. 2014, 7, 1297–1333. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Diez, M.; Fernandez, J.; Fita, L.; Yague, C. Seasonal dependence of WRF model biases and sensitivity to PBL schemes over Europe. Q. J. R. Meteorol. Soc. 2013, 139, 501–514. [Google Scholar] [CrossRef] [Green Version]
- Kain, J.S.; Fritsch, M. A one-dimensional entraining/detraining plume model and its application in convective parameterization. J. Atmos. Sci. 1990, 47, 2784–2802. [Google Scholar] [CrossRef] [Green Version]
- Kain, J.S. The Kain–Fritsch convective parameterization: An update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Alapaty, K.; Herwehe, J.; Delgenio, A.; Niyogi, D. Improving high-resolution weather forecasts using the weather research and forecasting (WRF) model with an updated Kain–Fritsch scheme. Mon. Weather Rev. 2015, 144, 150528113541009. [Google Scholar] [CrossRef]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmospheres: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. 1997, 102, 16663–16682. [Google Scholar] [CrossRef] [Green Version]
- Dudhia, J. Numerical study of convection observed during the winter monsoon experiment using a mesoscale two-dimensional model. J. Atmos. Sci. 1989, 46, 3077–3107. [Google Scholar] [CrossRef]
- Morrison, H.; Thompson, G.; Tatarskii, V. Impact of cloud microphysics on the development of trailing stratiform precipitation in a simulated squall line: Comparison of one- and two-moment schemes. Mon. Weather Rev. 2009, 137, 991–1007. [Google Scholar] [CrossRef] [Green Version]
- Warrach-Sagi, K.; Schwitalla, T.; Wulfmeyer, V.; Bauer, H. Evaluation of a climate simulation in Europe based on the WRF–NOAH model system: Precipitation in Germany. Clim. Dyn. 2013, 41, 755–774. [Google Scholar] [CrossRef] [Green Version]
- Pleim, J.E.; Xiu, A. Development and testing of a surface flux and planetary boundary layer model for application in mesoscale models. J. Appl. Meteor. 1995, 34, 16–32. [Google Scholar] [CrossRef] [Green Version]
- Xiu, A.; Pleim, J.E. Development of a land surface model part I: Application in a mesoscale meteorology model. J. Appl. Meteor. 2001, 40, 192–209. [Google Scholar] [CrossRef]
- Zhang, C.; Lin, H.; Chen, M.; Yang, L. Scale matching of multiscale digital elevation model (DEM) data and the Weather Research and Forecasting (WRF) model: A case study of meteorological simulation in Hong Kong. Arab J. Geosci. 2014, 7, 2215–2223. [Google Scholar] [CrossRef]
- Lin, Y.; Colle, B.A. A new bulk microphysical scheme that includes riming intensity and temperature-dependent ice characteristics. Mon. Weather Rev. 2011, 139, 1013–1035. [Google Scholar] [CrossRef]
- Fersch, B.; Kunstmann, H. Atmospheric and terrestrial water budgets: Sensitivity and performance of configurations and global driving data for long term continental scale WRF simulations. Clim. Dyn. 2014, 42, 2367–2396. [Google Scholar] [CrossRef] [Green Version]
- Madala, S.; Satyanarayana, A.; Srinivas, C.; Bhishma, T. Performance evaluation of PBL schemes of ARW model in simulating thermo-dynamical structure of pre-monsoon convective episodes over Kharagpur using STORM data sets. Pure Appl. Geophys. 2016, 173, 1803–1827. [Google Scholar] [CrossRef]
- Schwitalla, T.; Bauer, H.-S.; Wulfmeyer, V.; Aoshima, F. High resolution simulation over central Europe: Assimilation experiments during COPS IOP 9c. Q. J. Roy. Meteor. Soc. 2011, 137, 156–175. [Google Scholar] [CrossRef]
- Politi, N.; Nastos, P.T.; Sfetsos, A.; Vlachogiannis, D.; Dalezios, N.R. Evaluation of the AWR-WRF model configuration at high resolution over the domain of Greece. Atmos. Res. 2018, 208, 229–245. [Google Scholar] [CrossRef]
- Guerova, G.; Brockmann, E.; Quiby, J.; Schubiger, F.; Matzler, C. Validation of NWP mesoscale models with Swiss GPS Network AGNES. J. App. Meteorol. 2003, 42, 141–150. [Google Scholar] [CrossRef]
- Guerova, G.; Brockmann, E.; Schubiger, F.; Morland, J.; Matzler, C. An integrated assessment of measured and modeled IWV in Switzerland for the period 2001–2003. J. App. Meteorol. 2005, 44, 1033–1044. [Google Scholar] [CrossRef]
- Haase, J.; Ge, M.; Vedel, H.; Calais, E. Accuracy and variability of GPS tropospheric delay measurements of water vapor in the western Mediterranean. J. App. Meteorol. 2003, 42, 1547–1568. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software | Gipsy 6.4 |
|---|---|
| GNSS | GPS and GLONASS |
| Troposphere estimated parameters | ZTD (5 min) |
| Ionosphere | HOI included |
| Ocean tides | FES2004 |
| ZTD timestamp | hh:00 and hh:30 |
| Elevation cut-off | 5 |
| MOD1 | MOD2 | MOD3 | MOD4 | MOD5 | |
|---|---|---|---|---|---|
| Microphysics (mp) | WSM3 | Morrison | Morrison | Morrison | SBU-YLin |
| Land surface (sf) | NOAH | NOAH | Pleim-Xiu | Pleim-Xiu | NOAH |
| Surface layer physics (sfclay) | Monin-Obukhov | Monin-Obukhov | Pleim-Xiu | Pleim-Xiu | MM5 similarity |
| Radiation physics (sw) | Dudhia | Dudhia | Dudhia | Dudhia | Dudhia |
| Radiation physics (lw) | RRTM | RRTM | RRTM | RRTM | RRTM |
| Planetary boundary layer physics (pbl) | MYJ | MYJ | ACM2 | ACM2 | YSU |
| Cloud physics (cu) | Kain-Fritsch at 27 km | Kain-Fritsch at 27 km | Kain-Fritsch at 27 km | Kain-Fritsch at 27 and 9 km | Kain-Fritsch at 27 and 9 km |
| Station | Elevation (m) | R | RMSE (mm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MOD1 | MOD2 | MOD3 | MOD4 | MOD5 | MOD1 | MOD2 | MOD3 | MOD4 | MOD5 | ||
| MESO | 2 | 0.73 | 0.74 | 0.78 | 0.77 | 0.81 | 30.5 | 30.9 | 28.3 | 26.1 | 25.1 |
| XILI | 4 | 0.70 | 0.71 | 0.76 | 0.78 | 0.77 | 32.4 | 32.6 | 30.3 | 26.6 | 26.7 |
| VALI | 9 | 0.70 | 0.68 | 0.70 | 0.71 | 0.73 | 25.2 | 26.4 | 25.4 | 24.4 | 24.4 |
| LAMB | 10 | 0.70 | 0.71 | 0.74 | 0.75 | 0.76 | 25.2 | 25.4 | 23.1 | 22.8 | 22.9 |
| TRIZ | 25 | 0.63 | 0.61 | 0.70 | 0.70 | 0.70 | 27.0 | 28.4 | 26.6 | 24.8 | 24.9 |
| PSAR | 55 | 0.69 | 0.68 | 0.75 | 0.73 | 0.73 | 26.7 | 28.0 | 26.4 | 24.1 | 23.1 |
| PAT0 | 91 | 0.77 | 0.78 | 0.81 | 0.84 | 0.85 | 29.9 | 30.5 | 25.0 | 24.6 | 27.6 |
| ARSA | 115 | 0.74 | 0.75 | 0.79 | 0.82 | 0.83 | 27.0 | 27.5 | 23.0 | 22.1 | 23.3 |
| EYPA | 166 | 0.67 | 0.68 | 0.74 | 0.75 | 0.75 | 27.3 | 27.6 | 24.7 | 22.8 | 22.8 |
| ROD3 | 452 | 0.71 | 0.71 | 0.74 | 0.76 | 0.77 | 28.4 | 28.9 | 26.7 | 24.8 | 26.7 |
| MESA | 477 | 0.67 | 0.69 | 0.74 | 0.74 | 0.74 | 28.5 | 28.9 | 27.3 | 25.4 | 25.1 |
| LIDO | 550 | 0.60 | 0.60 | 0.67 | 0.60 | 0.57 | 29.8 | 30.0 | 29.5 | 28.0 | 26.6 |
| KOUN | 564 | 0.71 | 0.69 | 0.71 | 0.73 | 0.75 | 25.7 | 27.0 | 25.0 | 23.5 | 23.1 |
| KALA | 716 | 0.66 | 0.66 | 0.69 | 0.70 | 0.73 | 22.3 | 22.6 | 20.1 | 20.6 | 21.4 |
| KRIN | 758 | 0.68 | 0.66 | 0.67 | 0.70 | 0.72 | 22.8 | 24.5 | 23.0 | 21.7 | 22.2 |
| ANOC | 1020 | 0.66 | 0.67 | 0.72 | 0.72 | 0.70 | 35.5 | 36.5 | 35.1 | 32.2 | 31.4 |
| AVG16 | 0.69 | 0.69 | 0.73 | 0.73 | 0.74 | 27.8 | 28.5 | 26.2 | 24.6 | 24.4 | |
| Station | Elevation ASL (m) | ΜΒ | ΜΑΒ | RMSE | R |
|---|---|---|---|---|---|
| ANOC | 1020 | −23.8 | 24.5 | 28.3 | 0.92 |
| ARSA | 115 | −16.4 | 19.2 | 23.9 | 0.92 |
| AIGI | 142 | −18.1 | 20.7 | 25.3 | 0.92 |
| GALA | 33 | −19.6 | 22.1 | 27.3 | 0.93 |
| EYPA | 166 | −19.5 | 21.3 | 25.7 | 0.93 |
| KALA | 716 | −11.1 | 14.9 | 19.1 | 0.92 |
| KOUN | 564 | −16.8 | 19.1 | 23.4 | 0.92 |
| KRIN | 758 | −19.4 | 21.0 | 26.4 | 0.91 |
| LAMB | 10 | −14.0 | 19.0 | 22.4 | 0.91 |
| LIDO | 550 | −12.1 | 16.1 | 20.3 | 0.92 |
| MESA | 477 | −22.5 | 23.7 | 27.9 | 0.93 |
| MESO | 2 | −18.3 | 21.4 | 26.7 | 0.91 |
| PAT0 | 91 | −25.5 | 26.5 | 30.9 | 0.93 |
| PSAR | 55 | −15.1 | 18.1 | 22.7 | 0.93 |
| PSAT | 19 | −28.2 | 29.0 | 32.9 | 0.92 |
| ROD3 | 452 | −20.8 | 22.2 | 26.5 | 0.92 |
| TRIZ | 25 | −21.4 | 22.9 | 27.4 | 0.93 |
| VALI | 9 | −14.5 | 18.1 | 22.9 | 0.93 |
| XILI | 4 | −28.0 | 28.6 | 33.1 | 0.93 |
| AVG19 | −19.2 | 21.5 | 25.9 | 0.92 |
| Season | S1 | S2 | S3 | S4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |σ| | RMSE | R | |σ| | RMSE | R | |σ| | RMSE | R | |σ| | RMSE | R | |
| ANOC | 24.9 | 28.0 | 0.85 | 25.1 | 28.9 | 0.89 | 25.8 | 30.5 | 0.82 | 22.3 | 25.6 | 0.93 |
| ARSA | 19.8 | 24.2 | 0.86 | 18.3 | 22.8 | 0.89 | 20.6 | 25.8 | 0.84 | 18.1 | 22.4 | 0.93 |
| AIGI | 19.6 | 23.5 | 0.81 | 20.4 | 25.2 | 0.89 | 22.2 | 27.6 | 0.84 | 20.8 | 24.6 | 0.93 |
| GALA | 22.1 | 27.1 | 0.84 | 22.3 | 27.4 | 0.87 | 23.1 | 28.6 | 0.86 | - | - | - |
| EYPA | 20.9 | 24.6 | 0.87 | 20.3 | 24.9 | 0.89 | 22.9 | 27.9 | 0.84 | 21.1 | 25.0 | 0.94 |
| KALA | 14.2 | 18.3 | 0.82 | 15.0 | 19.0 | 0.89 | 16.7 | 21.5 | 0.83 | 13.4 | 17.0 | 0.93 |
| KOUN | 18.9 | 22.6 | 0.83 | 17.7 | 22.0 | 0.89 | 20.2 | 25.4 | 0.84 | 19.6 | 23.4 | 0.93 |
| KRIN | 22.7 | 27.9 | 0.75 | 20.7 | 26.6 | 0.87 | 20.4 | 25.7 | 0.82 | 18.3 | 23.3 | 0.91 |
| LAMB | 18.5 | 22.8 | 0.84 | 17.5 | 22.4 | 0.87 | 18.4 | 23.1 | 0.84 | 16.6 | 21.4 | 0.93 |
| LIDO | 16.8 | 20.6 | 0.88 | 16.5 | 20.9 | 0.85 | 16.2 | 21.1 | 0.85 | 15.5 | 19.2 | 0.93 |
| MESA | 22.5 | 26.0 | 0.87 | 22.6 | 26.8 | 0.88 | 26.3 | 31.0 | 0.82 | 23.1 | 27.1 | 0.93 |
| MESO | 20.0 | 23.9 | 0.88 | 20.9 | 25.2 | 0.89 | 25.3 | 32.2 | 0.71 | 20.3 | 24.9 | 0.94 |
| PAT0 | 26.0 | 29.4 | 0.88 | 26.1 | 30.4 | 0.88 | 28.6 | 33.1 | 0.82 | 26.4 | 30.4 | 0.93 |
| PSAR | 16.9 | 21.0 | 0.85 | 17.8 | 22.4 | 0.89 | 20.3 | 25.5 | 0.85 | 17.3 | 21.6 | 0.94 |
| PSAT | 30.1 | 33.2 | 0.86 | 28.2 | 32.6 | 0.87 | 28.0 | 33.1 | 0.84 | 29.1 | 32.8 | 0.94 |
| ROD3 | 19.3 | 23.8 | 0.84 | 23.3 | 27.4 | 0.89 | 24.6 | 29.3 | 0.85 | 21.6 | 26.4 | 0.92 |
| TRIZ | 22.5 | 26.4 | 0.87 | 22.8 | 27.2 | 0.89 | 24.9 | 30.2 | 0.84 | 22.5 | 26.5 | 0.94 |
| VALI | 17.5 | 21.7 | 0.84 | 17.8 | 22.8 | 0.89 | 20.0 | 25.5 | 0.84 | 17.2 | 21.5 | 0.94 |
| XILI | 30.5 | 33.6 | 0.86 | 27.5 | 32.7 | 0.88 | 29.8 | 35.0 | 0.84 | 26.3 | 30.6 | 0.94 |
| AVG19 | 21.2 | 25.2 | 0.85 | 21.1 | 25.7 | 0.88 | 22.8 | 28.0 | 0.83 | 20.5 | 24.6 | 0.93 |
| Season | Ratio of σ above π (23 mm) | Ratio of σ below –π (−23 mm) | Ratio of σ between π and –π |
|---|---|---|---|
| S1 | <0.01 | 0.39 | 0.61 |
| S2 | 0.01 | 0.37 | 0.62 |
| S3 | 0.02 | 0.41 | 0.57 |
| S4 | <0.01 | 0.37 | 0.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roukounakis, N.; Katsanos, D.; Briole, P.; Elias, P.; Kioutsioukis, I.; Argiriou, A.A.; Retalis, A. Use of GNSS Tropospheric Delay Measurements for the Parameterization and Validation of WRF High-Resolution Re-Analysis over the Western Gulf of Corinth, Greece: The PaTrop Experiment. Remote Sens. 2021, 13, 1898. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13101898
Roukounakis N, Katsanos D, Briole P, Elias P, Kioutsioukis I, Argiriou AA, Retalis A. Use of GNSS Tropospheric Delay Measurements for the Parameterization and Validation of WRF High-Resolution Re-Analysis over the Western Gulf of Corinth, Greece: The PaTrop Experiment. Remote Sensing. 2021; 13(10):1898. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13101898
Chicago/Turabian StyleRoukounakis, Nikolaos, Dimitris Katsanos, Pierre Briole, Panagiotis Elias, Ioannis Kioutsioukis, Athanassios A. Argiriou, and Adrianos Retalis. 2021. "Use of GNSS Tropospheric Delay Measurements for the Parameterization and Validation of WRF High-Resolution Re-Analysis over the Western Gulf of Corinth, Greece: The PaTrop Experiment" Remote Sensing 13, no. 10: 1898. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13101898