1. Introduction
Land surface temperature (LST)—like near-surface air temperature—is a key variable in a wide variety of studies, since it is linked to land–atmosphere energy transfer and flux balances [
1,
2]. Thus, it is required for monitoring evapotranspiration and climate change [
3,
4], as well as for providing estimates of fire size and temperature [
5,
6], volcanoes and lava flow [
7,
8], and vegetation health [
9,
10,
11]. According to the Global Climate Observing System [
12], the World Meteorological Organization (WMO) considers LST as one of the essential climate variables (ECVs). The Climate Change Initiative (CCI) was launched by the European Space Agency (ESA) for improving the prediction of climate change trends by means of satellite data [
13]. The CCI considers LST an important variable for monitoring the Earth climate system; therefore, they included it in the list of ECVs required for understanding and predicting the evolution of climate (
http://cci.esa.int/ (accessed on 1 March 2021)). Consequently, the validation of satellite derived LSTs against independent references is crucial for assessing their accuracy and precision. For LST retrieval from satellite data, the GCOS set the recommended thresholds on accuracy (bias, defined as the systematic uncertainty by the Joint Committee for Guides in Metrology [
14], JCGM) and precision (standard deviation, SD, defined as the random uncertainty by the JCGM [
14]) to 1 K [
12].
The Sea and Land Surface Temperature Radiometer (SLSTR) on board the Sentinel-3A and 3B spacecrafts is a follow-on instrument of the Advanced Along-Track Scanning Radiometer (AATSR). The two sensors have similar characteristics, including their thermal channels at 11 and 12 µm, with double view capability, and allow us to apply split-window algorithms (SWAs) and dual-angle algorithms (DAAs). In this paper, the SWA proposed by Niclòs et al. in [
15] and the DAA proposed by Coll et al. in [
16] were adapted to SLSTR’s thermal bands. The SWA proposed by Niclòs et al. in [
15] was developed for the Spinning Enhanced Visible and InfraRed Imager (SEVIRI) onboard Meteosat Second Generation (MSG) and depends explicitly on emissivity and view zenith angle. SLSTR has view zenith angles up to 60° [
17] and, thus, angular anisotropy may have an important impact on LST retrieval, which was noticed when analyzing the angular dependence of the SWA’s regression coefficients. For the SEVIRI sensor, over the rice paddy site, the SWA proposed by Niclòs et al. in [
15] provided an accuracy (bias) and precision (SD) of 0.5 and 0.8 K, respectively. The capability of the AATSR sensor to apply the DAA was previously analyzed in [
16] over full vegetation cover. These authors proposed and validated a SWA and a DAA, obtaining a higher standard deviation for the DAA, with accuracy (precision) of 0.0 K (1.0 K). They concluded that the DAA performed worse than the SWA, mainly due to differences between the nadir and oblique footprints [
16].
The operational LST level 2 (L2) product for the SLSTR sensor is generated with a SWA whose coefficients depend on surface biome, water vapor content (WVC) in the atmosphere, and vegetation fraction cover [
18,
19]. Previous studies validated the Sentinel-3A SLSTR operational LST product over a variety of surfaces, but not over a rice paddy. In the ESA validation report, 11 sites were used to validate the SLSTR LST product over different land covers [
20]: seven were stations of the SURFace RADiance (SURFRAD) network, which uses pyrgeometers (3–50 µm), three were stations of the Karlsruhe Institute Technology (KIT) equipped with narrow band radiometers (9.6–11.5 µm), and one was the U.S. Department of Energy’s Atmospheric Radiation Measurement (ARM) station equipped with narrow band radiometers.
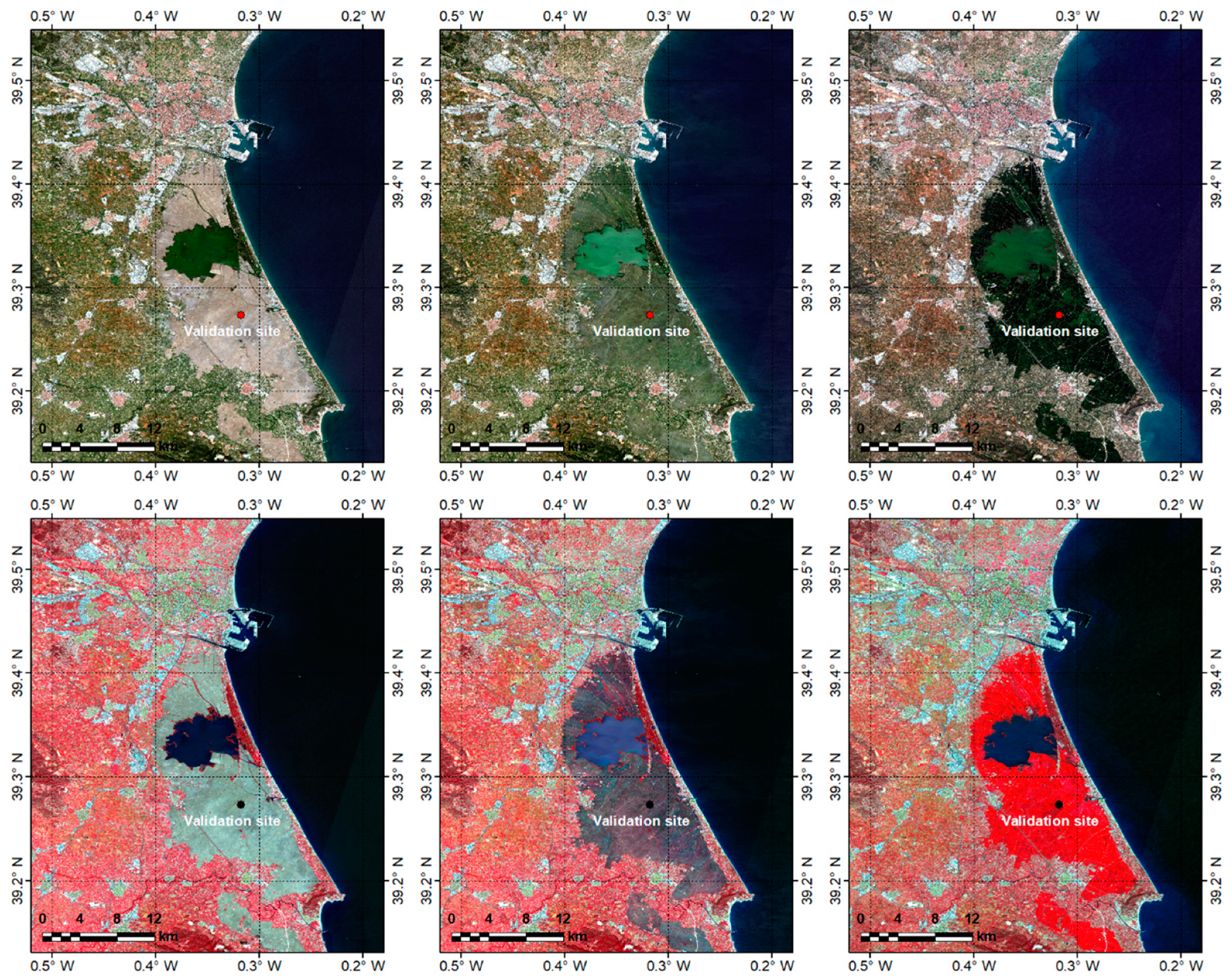
In this paper, phenological changes of a rice paddy during the growing period were used to validate the SLSTR LST product over three different surfaces: bare soil (wet and dry), water (flooded surfaces), and full vegetation cover. A permanent station with a wide band Thermal Infrared (TIR) radiometer continuously recorded ground measurements, which were then compared with concurrent satellite LST values.
The main objective of this paper is to validate the results of the proposed SWAs and the operational SLSTR LST product. Additionally, three explicitly emissivity-dependent SWAs proposed by Sobrino et al. [
21], Zhang et al. [
22], and Zheng et al. [
23] (hereafter called Sobrino16, Zhang19, and Zheng 19 SWAs, respectively) were evaluated under the same conditions. The main goal of proposing an explicitly angular and emissivity-dependent SWA for SLSTR is to provide a better-performing alternative to the biome-dependent (i.e., implicitly emissivity-dependent) SWA used for generating the operational product, but also to Sobrino16, Zhang19 and Zheng 19. Building on these works, this paper presents the adaptation of an SWA with explicit angular dependence, which was previously successfully applied to SEVIRI data, to SLSTR; the validation of the adapted SWA and its comparison with other SWAs with an explicit emissivity dependence; the adaptation of a DAA to SLSTR and its validation. The validation results presented here are based on in-situ LST obtained from wide band radiometers (8–14 µm; more similar to satellite TIR observations and more accurate than pyrgeometers), which are installed at a permanent station located in a rice paddy (i.e., the Valencia LST Validation site). Despite being limited to a single site, the phenological changes over the year allowed us to validate the LST retrieved from Sentinel-3A and Sentinel-3B over three, previously unrepresented, homogeneous land cover types.
Section 2 describes the validation site and the in-situ LST and emissivity data. The SLSTR LST operational product algorithm and the different emissivity-dependent algorithms evaluated in this study are described in
Section 3.
Section 4 presents the validation results for each algorithm, and a discussion is provided in
Section 5. Conclusions are drawn in
Section 6.
5. Discussion
An explicit emissivity and angle dependent SWA and two DAAs for Sentinel-3 SLSTR (using the channels centered at 11 µm and 12 µm) were proposed and validated. The SWA was adapted from the SWA proposed in [
15] for SEVIRI sensor, while the DAAs were adapted from an algorithm developed for AATSR in [
16]. Although [
16] determined a better performance for the AATSR SWA, the double view capability of SLSTR (i.e., its nadir and backward views) for LST retrieval should be analyzed in order to identify possible differences to AATSR. Furthermore, the operational Sentinel-3A and Sentinel-3B SLSTR L2 LST products and three explicit emissivity-dependent SWAs (i.e., Sobrino16 [
21], Zhang19 [
22], and Zheng19 [
23] SWAs) were validated.
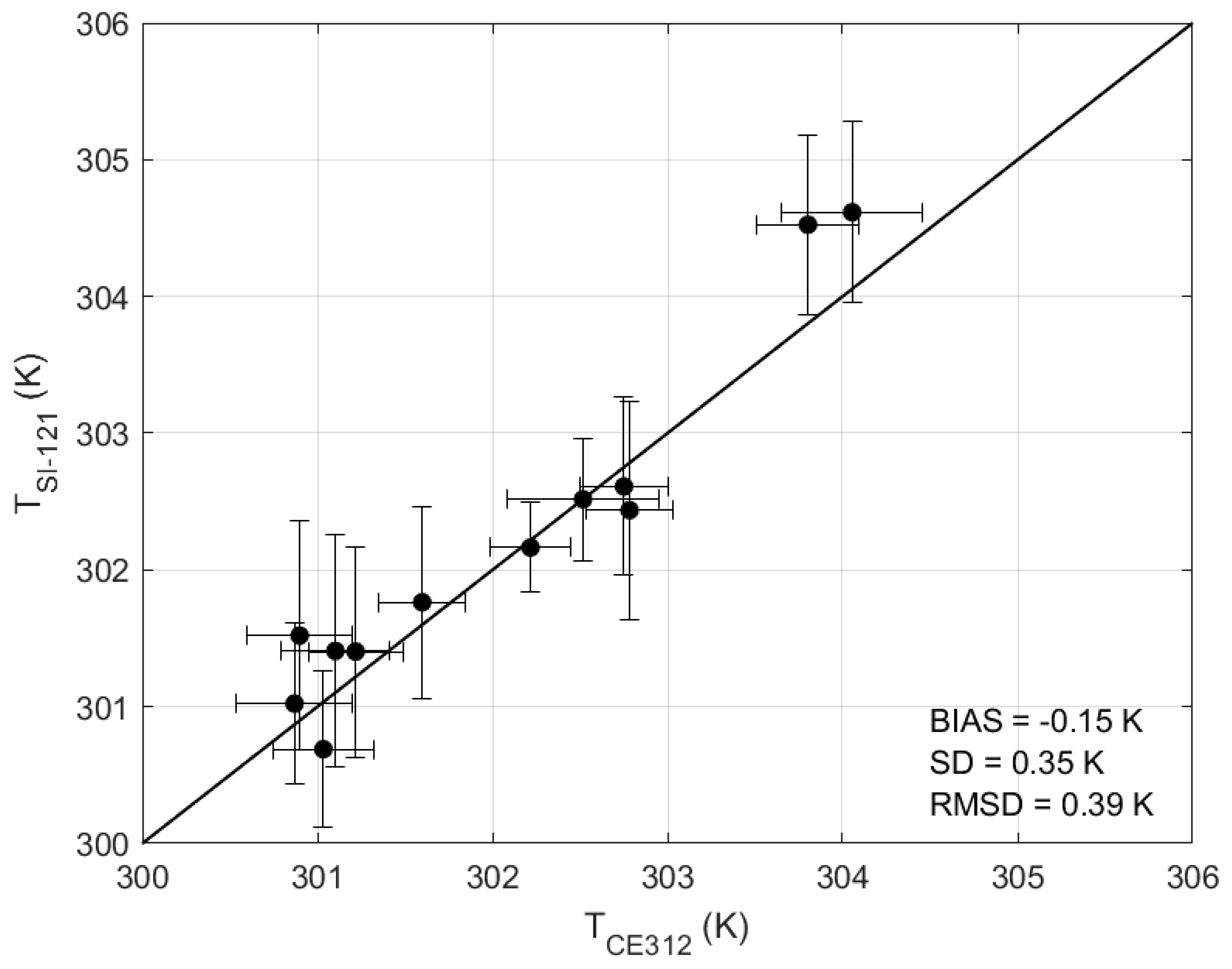
The validation used in-situ LSTs from a rice paddy site close to Valencia, Spain, which represents three seasonal homogeneous land cover types with different spectral features. These in-situ data were collected by two Apogee SI-121 wideband (8–14 µm) radiometers installed on a permanent station at the site. The narrower viewing geometry and spectral range makes TIR radiometers (e.g., Apogee SI-121, Heitronics KT15.85) more suitable for LST validation purposes than broadband hemispherical pyrgeometers (3–50 µm), which are commonly used [
32]. Additionally, the uncertainty of typically used radiometers (e.g., ±0.2 K for Apogee SI-121) is lower than for pyrgeometers, which is around 1 K [
60]. When considering the uncertainties in upwelling and downwelling radiance measurements and emissivity, the uncertainty of in-situ LST obtained with pyrgeometers results in a typical uncertainty of ±1 to ±2 K [
61]. In [
62], compared simultaneous measurements with wideband radiometers and a pyrgeometer over asphalt and four grassland sites. From this comparison, they observed a standard deviation of up to 2 K at the grassland sites and a general underestimation for the pyrgeometer data. This is in agreement with LST validations performed for various satellite sensors, e.g., MODIS [
63], VIIRS [
60], and Landsat-8 [
64], which used pyrgeometer measurements as reference: especially at daytime, these studies obtained similar standard deviations of around 2 K at grassland sites.
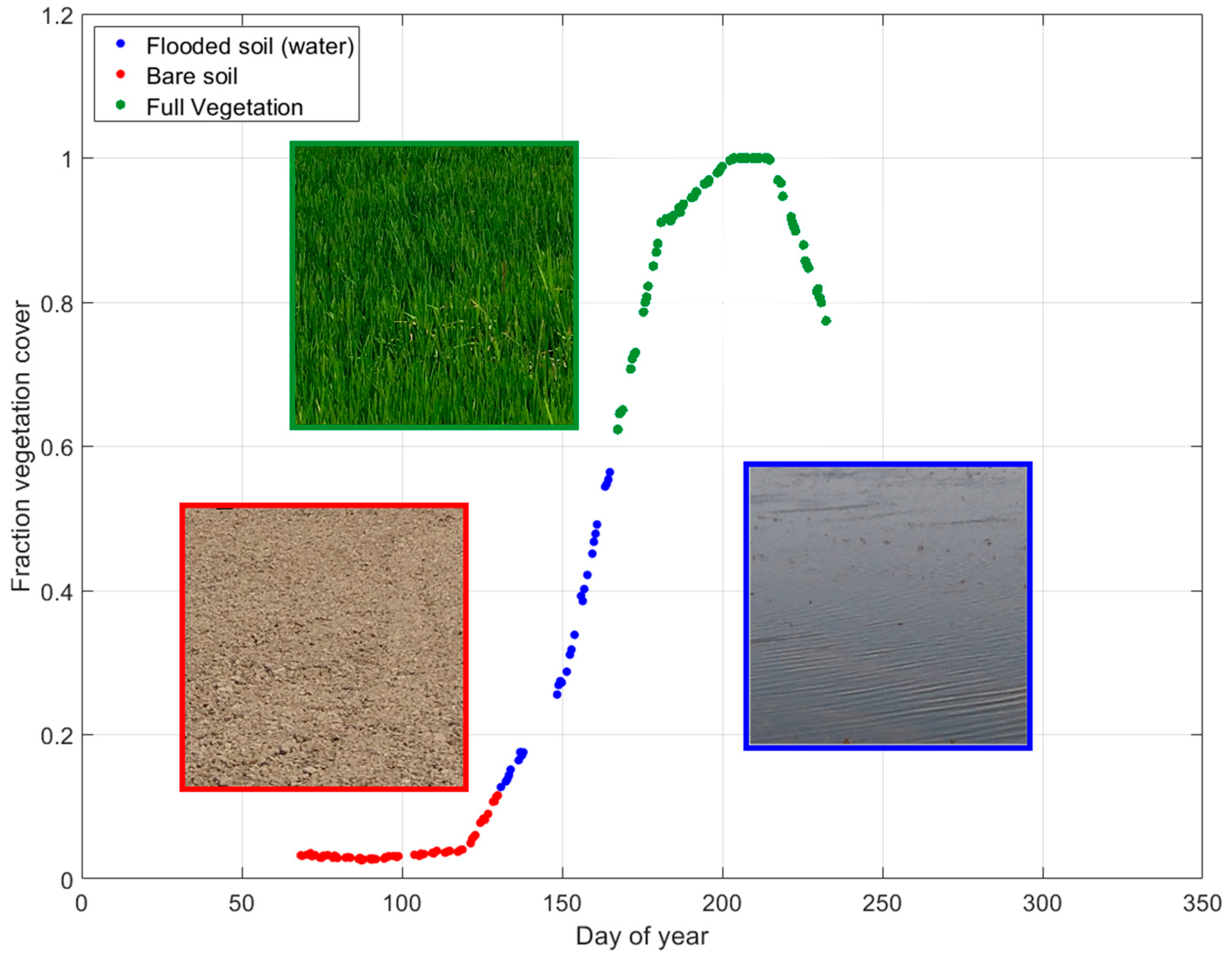
The GlobCover classification map, which is based on a static global classification, is used for generating the SLSTR LST product. In order to consider surface changes due to vegetation, seasonal changes or cropland harvest, each coefficient of the operational SLSTR LST algorithm is obtained as a combination of a vegetation coefficient and a bare soil coefficient, weighted by their cover fractions. However, for flooded soil at the study site, the vegetation fraction is higher than 0.3 (
Figure 2): while this may be plausible for the last few days considered as flooded soil, when the rice starts growing, it is implausible at the beginning of the flooding, when there is only water. According to agricultural laborers, changes on the surface should be more marked, since the site is flooded in a few days and is then covered entirely by water. However, for 15 out of 27 land cover types, the vegetation and bare soil coefficients provided in the SLSTR auxiliary data are the same, as is the case for the biome assigned to the study site (i.e., weighting by cover fraction has no effect).
Different coefficients for daytime and nighttime are provided only for water and flooded surface biomes (i.e., post-flooding or irrigated cropland). However, for most land cover types, e.g., bare soils, non-flooded forests, scrubland or grassland areas, the coefficients are the same for daytime and nighttime.
In the SLSTR LST algorithm, coefficients for irrigated cropland areas were obtained as an average of the coefficients for water, winter wheat, and broadleaf-deciduous trees according to the land cover classification given in [
65]. Since the land cover of the study site changes over the year, only the period of full vegetation matches with the assigned biome. However, the best validation results were obtained for the bare soil cover at daytime (R-RMSD = 1.6 K) and nighttime (R-RMSD = 1.0 K). Similar results were obtained for the SLSTR LST product over arid areas by other authors. In [
20], a RMSD of 1.9 K at the Gobabeb (Namibia) station was obtained, with a bias of 1.8 K and a SD of 0.8 K. In [
23], a bias of 1.1 K and a SD of 0.9 K were obtained, leading to a RMSD of 1.4 K. In these two cases, as well as in this study, SLSTR LST had a good precision, i.e., lower than or equal to 1.0 K, but an accuracy larger than the GCOS threshold (>1 K). Yang et al. in [
49] obtained a systematic uncertainty of 1.6 K and a RMSD of 2.4 K for Sentinel-3 SLSTR LST at the Gobabeb (Namibia) site. It should be noted that the biomes assigned to each validation site differ, so discrepancies due to different coefficients are possible.
For the Valencia rice paddy site, the validation over full vegetation cover shows considerably better results at nighttime, with median and RSD around 1K. However, for the daytime data, the median and RSD increase to 1.7 and 1.5 K, respectively. Due to the higher thermal heterogeneity at daytime, a slight increase in RSD is expected, but not the large increase observed for the median difference, which causes the daytime accuracy to miss the GCOS threshold. It is suspected that the increased median difference is mainly caused by different day and night retrieval coefficients. These results cannot be directly compared with results obtained over other vegetated areas, e.g., the Amazon site [
48] and Evora [
20]. The Amazon site [
48] was classified as closed to open broadleaved evergreen and/or semi-deciduous forest (biome 5) and yielded a SLSTR LST bias of −0.1 and a SD of 0.6 K for daytime and nighttime data. For Evora [
20], the assigned biome was rainfed croplands (biome 2) and the SLSTR LST bias was −0.8 (−0.4) K and SD 0.7 (0.3) K for daytime (nighttime). The biases obtained for these validation sites were relatively small and showed a slight LST underestimation, while an overestimation was found at the Valencia site, which was misclassified as biome 1 (irrigated cropland) with very different characteristics to a rice paddy.
For the evaluation of the operational Sentinel-3B SLSTR product, a total of 107 scenes (43 over flooded soil, 31 over bare soil, and 28 over full vegetation) were used. Compared to the validation results for Sentinel-3A, the obtained accuracy for full vegetation and bare soil was slightly better, while the precision was similar for full vegetation and worse for bare soil. For flooded soil, the validation results for Sentinel-3B were less accurate and more precise than for Sentinel-3A. As for Sentinel-3A, better results were observed for Sentinel-3B nighttime data, mainly because of the higher thermal homogeneity. For both sensors, large systematic uncertainty was observed over flooded soil (around 2 K for both daytime and nighttime). In contrast, over the deep and large water body of Lake Constance (classified as water body, biome 26), Yang et al. in [
49] reported a considerably smaller systematic uncertainty of 0.4 K and a RMSD of 0.7 K for the operational Sentinel-3 SLSTR LST product.
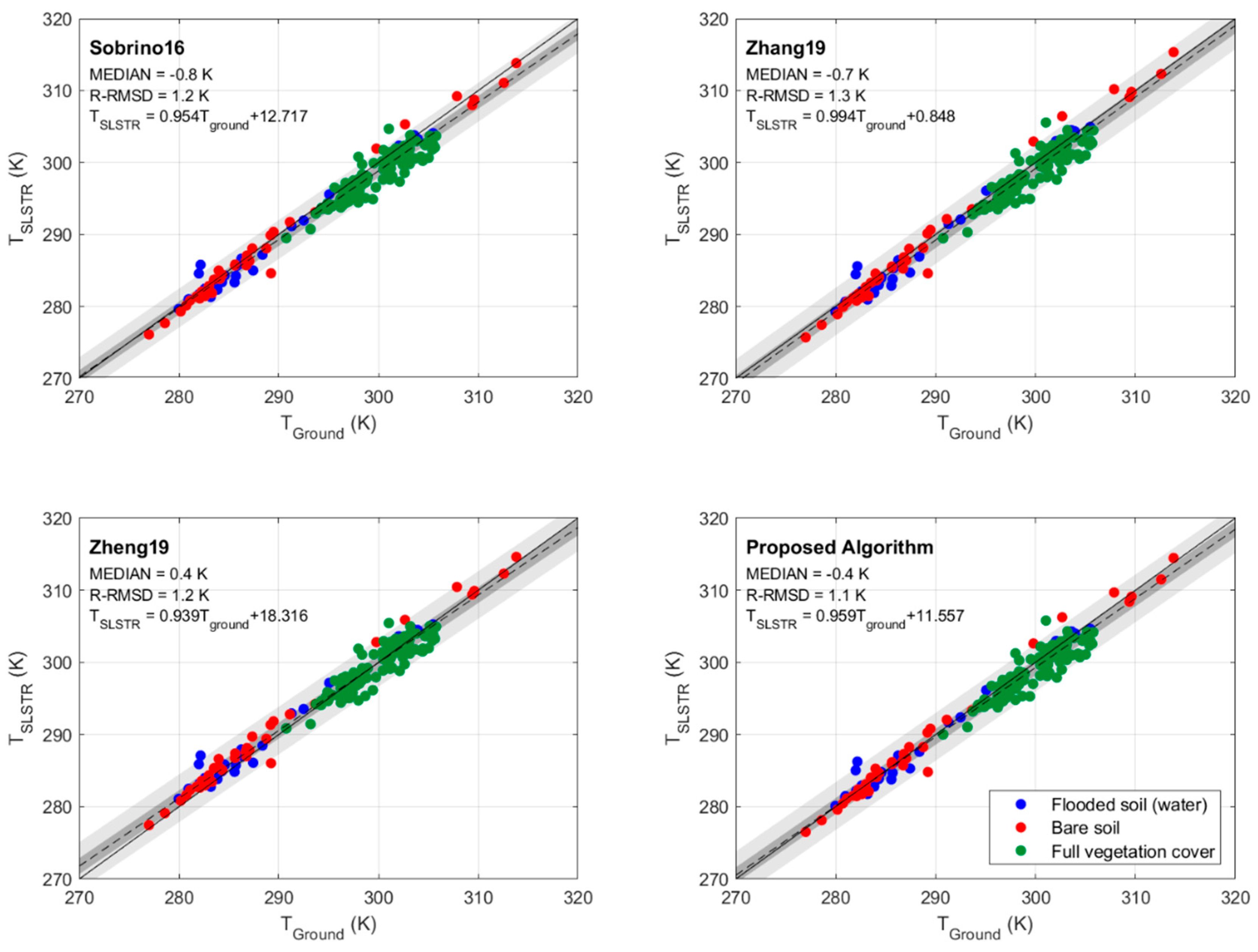
The proposed SWA with explicit emissivity and angular dependence and the three published emissivity-dependent SWAs were validated under identical conditions. Generally, all investigated algorithms performed well, with median and RSD lower than 1.5 K over all surfaces. For all surfaces combined, the proposed algorithm yielded median (RSD) values of −0.4 K (1.1 (K): together with the Zheng19 SWA, it showed the lowest median (best accuracy). However, all SWAs obtained similar RSD values between 0.9 and 1.1 K. The better accuracy of the Zheng19 algorithm is mainly linked to its exceptionally low median over full vegetation cover, which also represented most data; the other SWA proposed here showed more consistently low median values for all three land covers.
The coefficients of the proposed SWA were based on a simulated dataset produced for LST ranging between −6 K and +12 K around the lowest level of air temperature (
T0). These values were determined in [
50] from statistical analysis of MODIS products MOD08 and MOD11 for air temperature and LST values, respectively. This statistical analysis showed that the range of temperatures used for the simulation dataset covers most of the cases found over natural surfaces [
50]. A maximum increment of up to +20 K was used to produce Sobrino16 and Zhang19, although these increments were only for
T0 < 280 K on the latter. The Zheng19 SWA was produced with even larger increments of up to +30 K: this can be interesting for some applications (e.g., urban heat island, analyses of extreme temperatures), but can also cause an overfitting of retrieval coefficients, which in turn can increase retrieval uncertainty, particularly over the most common natural surfaces [
64].
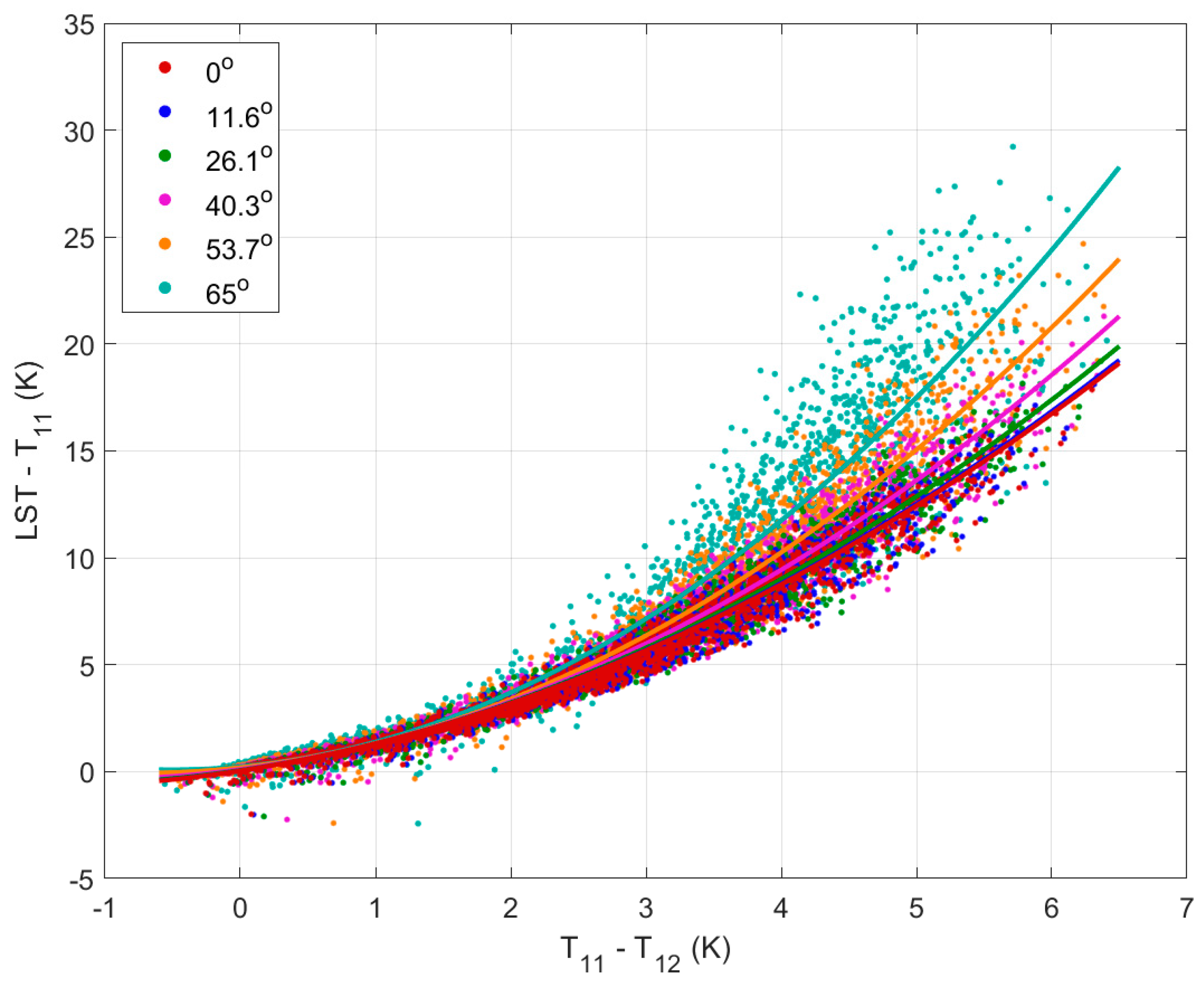
The similarity of the results could be linked to the moderate WVCs at the site (ranging from 0.5 to 4.4 cm, with a mean value of 2.4 ± 0.9 cm and only 3% of data >4 cm), which implies small atmospheric effects and a small dependence on viewing angle. The effect of the differential absorption in the atmosphere in the regression of the proposed SWA per viewing angle was shown in
Figure 4. For low to moderate brightness temperature differences, there is a minor angular dependence of the regression coefficients. However, for high brightness temperature differences, there is considerable angular dependence of the coefficients, corresponding to high WVCs (up to 7 cm) in the CLAR atmospheric database used for the regressions (brightness temperature differences were up to 6.4 K). For comparison, the largest values in the database for the brightness temperature difference in SLSTR channels 8 and 9 were around 4.0 K (with a mean of 1.5 ± 0.8 K). Thus, further validation experiments in tropical atmospheres and over regions with WVCs exceeding 4 cm should be performed to evaluate the algorithms in such extreme cases. Although there is a slight WVC seasonality (i.e., higher in the summer, lower in the winter), no significant differences observed in the results were unrelated to WVC, since no extreme WVC values were found at the site. Moreover, the uncertainty introduced by WVC (~0.1 K) on the SWA is negligible compared to the uncertainty introduced by emissivity (~0.5 K) or the retrieval algorithm (~1.4 K), as shown in
Table 3. The difference in the accuracy obtained with the proposed SWA for viewing angles lower and higher than 40° was 0.3 K, with an associated difference in precision of 0.6 K. Based on the simulations shown in
Figure 4, a decrease of precision with viewing angle was expected, since the atmospheric absorption increases considerably with viewing angle and, thus, also, the regression error. However, the relatively small change in accuracy indicates a good performance of the algorithm also at larger viewing angles.
At nighttime, for the three land covers at the rice paddy site, the algorithms showed good performance with accuracies and precisions better than the GCOS threshold (<1 K). In contrast, at daytime, the larger thermal heterogeneity caused an increase of RSDs for bare soil and full vegetation covers, with values of about 1.5 K. However, generally, similar accuracies were obtained at daytime and nighttime over bare soil and full vegetation cover and most values met the GCOS accuracy threshold.
For all algorithms the results were in agreement with previous validations performed by other authors at different sites: in [
21] obtained a bias of −1.4 K and a SD of 1.2 K for a cropland area in Oklahoma, which is comparable to our site with full vegetation cover. Although they had few data points, their results showed a similar precision to that obtained for the rice paddy site. Similar results were also obtained for SLSTR LST at an Amazon site in [
48], who obtained a bias of −1.3 K and a SD of 0.9 K. Zhang et al. in [
22] obtained a bias of −0.4 K and a SD of 0.9 K for a desert area in Wuhai, which are similar results to those obtained here with the same algorithm for bare soil. Yang et al. in [
49] trained nine SWAs to retrieved SLSTR LST. These SWAs were evaluated over the gravel plains at Gobabeb (Namibia) and Lake Constance (Germany, Switzerland and Austria); a bias from −0.2 K to −0.3 K (from −0.2 K to 0.3 K) and an RMSD of 1.6 K (0.5 K) were obtained at Gobabeb (Lake Constance). Finally, Zheng et al. in [
23] validated their proposed SWA using pyrgeometers and radiometers over cropland and grassland sites. Their overall results showed a bias of 0.6 K and SD of 2.2 K, which is higher than the corresponding values obtained at our study site for all surfaces combined and for full vegetation cover. The underestimation reported for a station at Henan Hebi, China, with daytime data from a radiometer over cropland, was similar to that for vegetation cover at our site, under similar conditions. The bias obtained in [
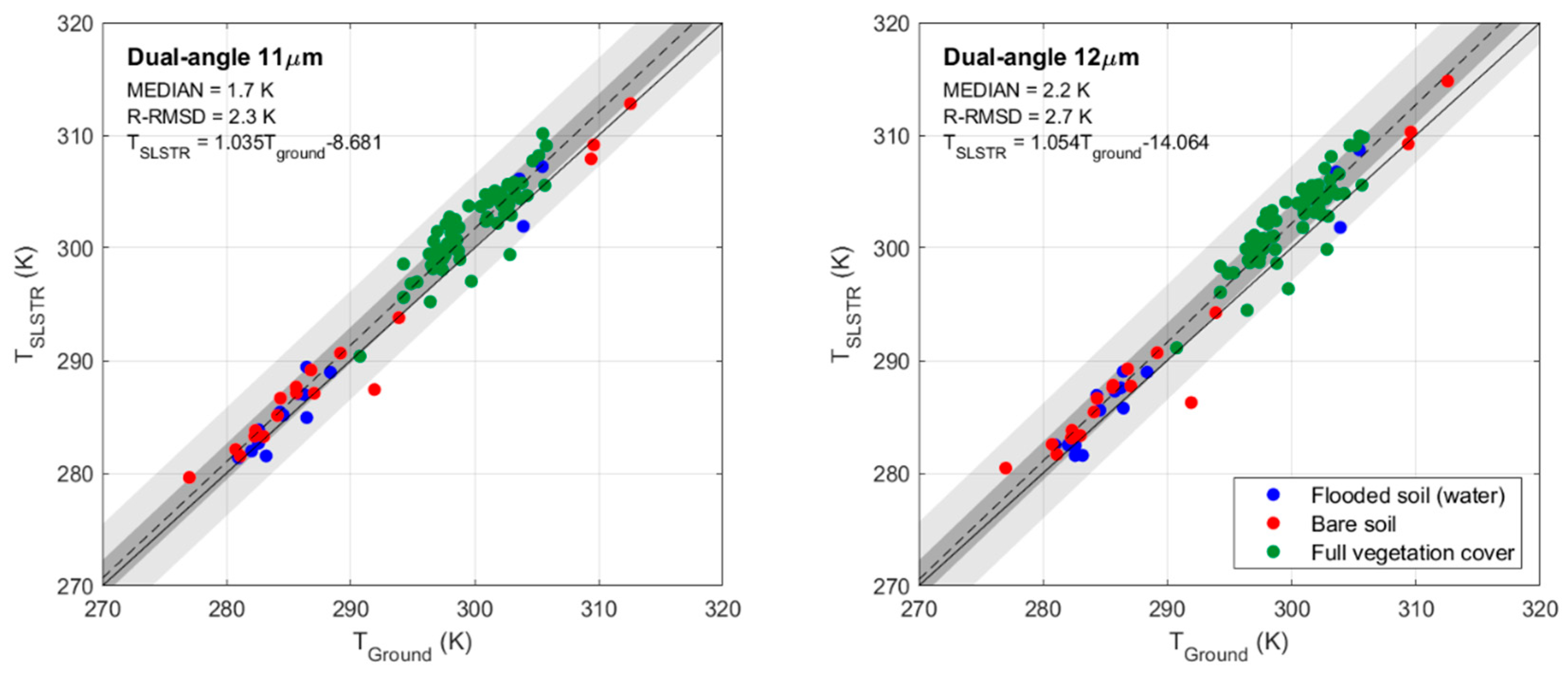
23] was the same as the median obtained here, while SD deviation was 2.4 K at the Henan Hebi site. The RSD found here was 1.3 K and, therefore, the Zheng19 algorithm performed much better at our study site. The proposed DAAs, which use SLSTR’s nadir and backward views, showed better results for the version applied to the 11 µm channel (DAA11), which over flooded soil yielded an accuracy and precision better than the GCOS threshold. For bare soil, the accuracy and precision were also close to the GCOS threshold. However, the accuracy was worse for full vegetation cover. DAA12 yielded R-RMSD values between 1.8 and 3 K for all land covers. These findings are in agreement with results for previous sensors (i.e., AATSR, [
16,
50]), where, regardless of land cover, DAAs also performed worse than SWAs, probably due to differences in sensor footprint between the views and directional effects on radiometric temperatures [
16].
6. Conclusions
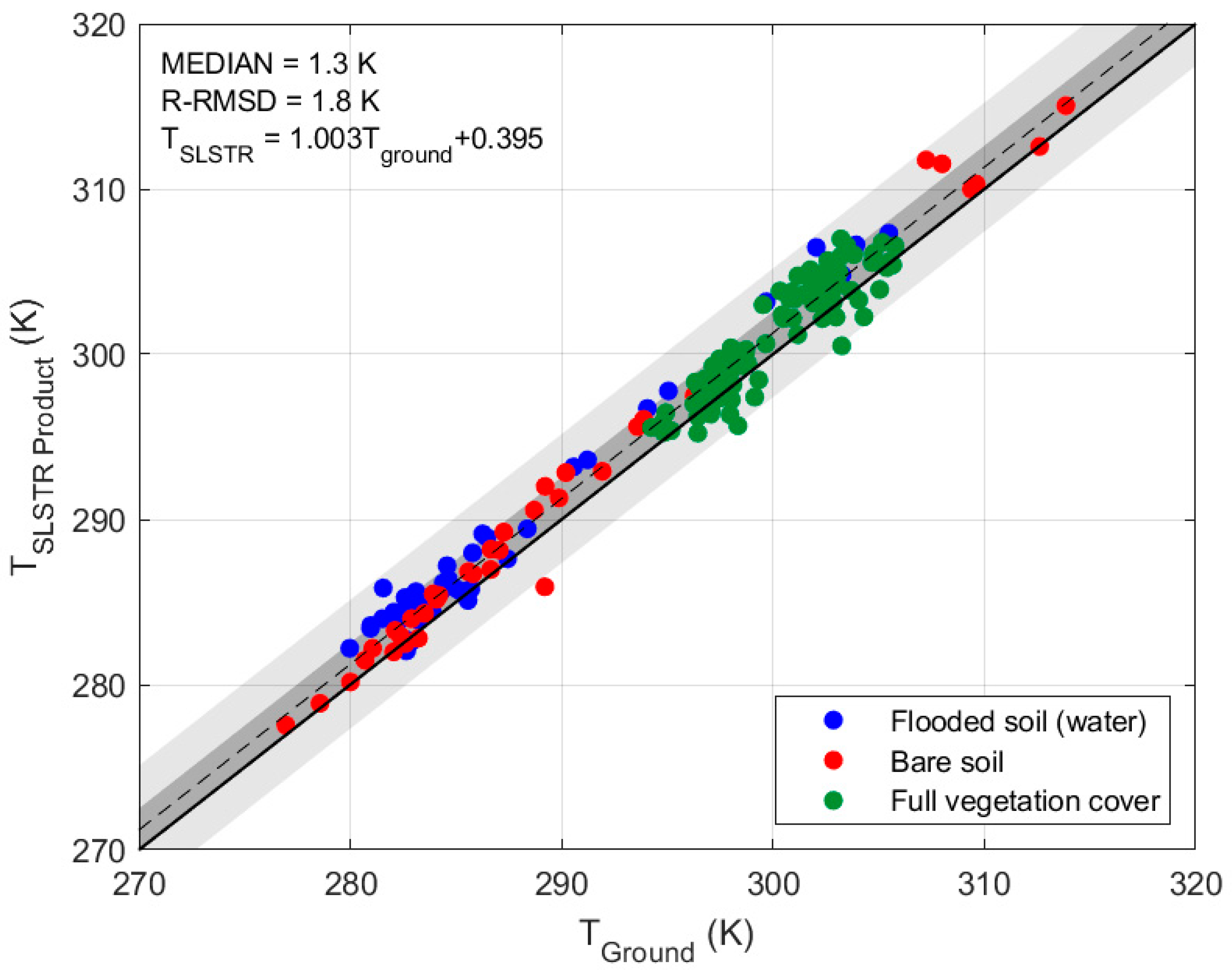
The operational SLSTR LST algorithm depends on biome, day/nighttime, vegetation fraction, and viewing zenith angle. From the validation results it is concluded that the operational Sentinel-3A SLSTR LST product is accurate for nighttime data, with an accuracy (systematic uncertainty, i.e., median) of 1.0 K and a precision (random uncertainty, i.e., RSD) of 1.0 K for the three investigated surfaces combined. In contrast, for daytime data an accuracy of 1.8 K and precision 1.2 K was determined. The increase in daytime RSD is attributed to the typically larger thermal heterogeneity of the land surface. In contrast, the increase in bias is thought to be caused by wrongly assigned biomes, i.e., the same coefficients were used for the three investigated land cover types. Additionally, the validation for the Sentinel-3B SLSTR LST product is of relevance since no robust validations were published for this platform. An accuracy of 1.5 K and a precision of 1.2 K were obtained, yielding to similar results to those obtained for the Sentinel-3A SLSTR LST product for all data combined.
The angular and emissivity-dependent algorithm proposed by Niclòs et al. in [
15] for MSG SEVIRI was adapted to Sentinel-3 SLSTR. The adapted SLSTR SWA was evaluated together with three emissivity-dependent algorithms proposed by Sobrino et al. in [
21], Zhang et al. in [
22] and Zheng et al. in [
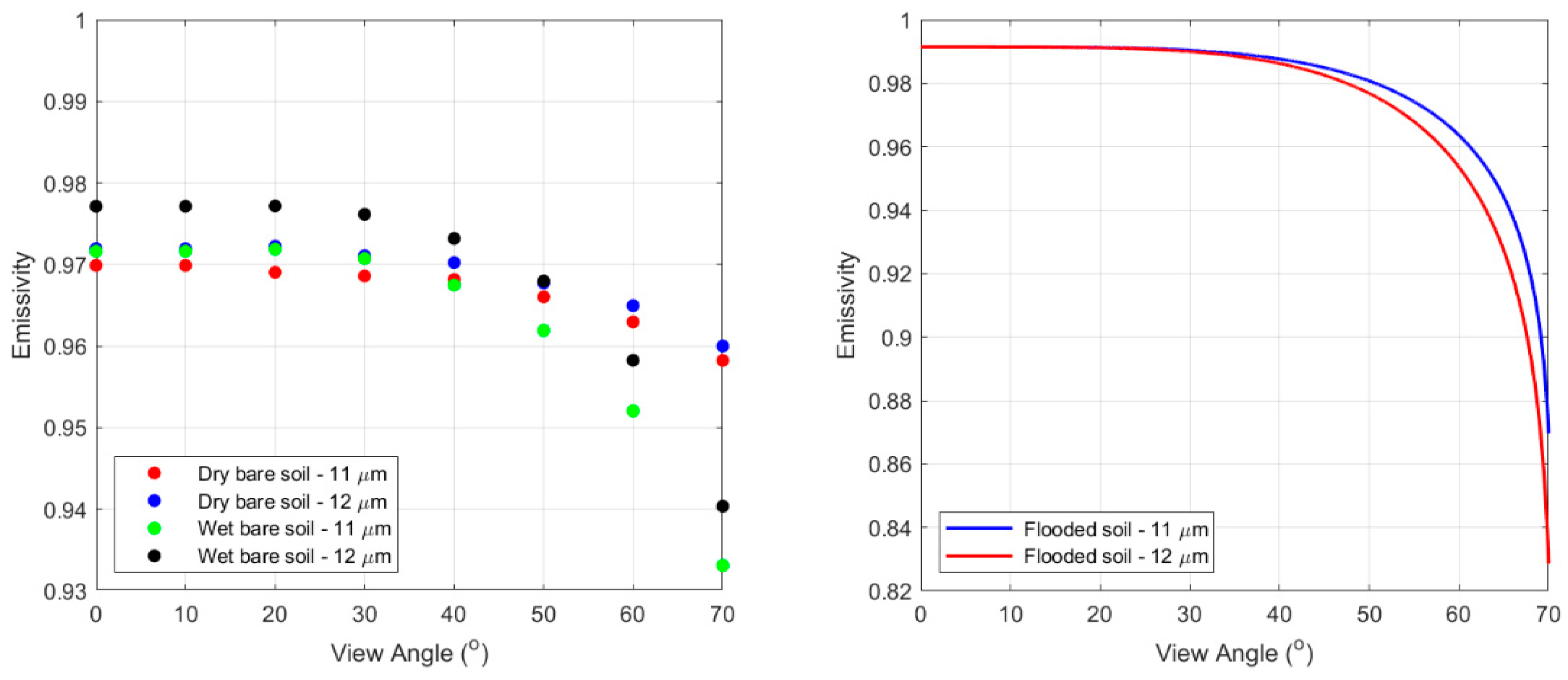
23] using Sentinel-3A SLSTR L1 data. For all data combined (i.e., the three land cover types), the differences between LST obtained with the proposed algorithm and in-situ LST had a median (RSD) of −0.4 K (1.1 K); the respective values were −0.8 K (0.9 K) for Sobrino16, −0.7 K (1.1 K) for Zhang19, and 0.4 K (1.1 K) for Zheng19. While Zheng19 and the SWA proposed here achieved the overall best accuracies, the latter showed a more consistent performance for the three investigated land covers. These cover a wide range of natural surface emissivities, i.e., from low values for dry bare soil, to medium values for wet bare soil, and high emissivity values for vegetation and water surfaces. Additionally, the explicit angular dependence of the proposed SWA will have higher benefits over areas with higher WVC, which is also illustrated by simulation data).
The overall accuracy improvements of the proposed SWA compared to the operational product is of 0.9 K, while it is 0.4 and 0.3 K compared to Sobrino16 and Zhang19 SWAs, respectively. The achieved improvements are highly significant, e.g., for climatological studies: when performing LST trend analyses, a global LST increase of 0.27 K/decade was observed from satellite data [
66], i.e., the observed trends per decade are still smaller than the accuracy improvement achieved by the proposed algorithm.
Furthermore, a DAA was proposed to investigate the usefulness of SLSTR’s dual-view capability for LST retrieval and separate sets of coefficients were determined for the 11 and 12 µm channels. While DAA11 performed better than DAA12, the dual-view algorithms still performed worse than the SWAs. However, an acceptable accuracy and precision of DAA11 was found over flooded soil and bare soil at the Valencia rice paddy site.
Over the rice paddy site, the explicitly emissivity-dependent SWAs were found to perform better than the operational Sentinel-3 SLSTR algorithm with biome-dependent coefficients. Among the emissivity-dependent SWAs, the proposed algorithm with explicit angular dependence showed a slightly better performance at the three land covers. The results of this algorithm are expected to improve for more humid atmospheres (i.e., WCV > 4 cm), where the impact of the angular effect is higher due to the increased atmospheric absorption.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}