
Neural Network-Based Active Fault-Tolerant Control Design for Unmanned Helicopter with Additive Faults


Abstract
:1. Introduction
- (1)
- Introducing a novel design to detect and isolate possible faults and false data injected attacks in a nonlinear six DoF model of the helicopter’s navigation sensors.
- (2)
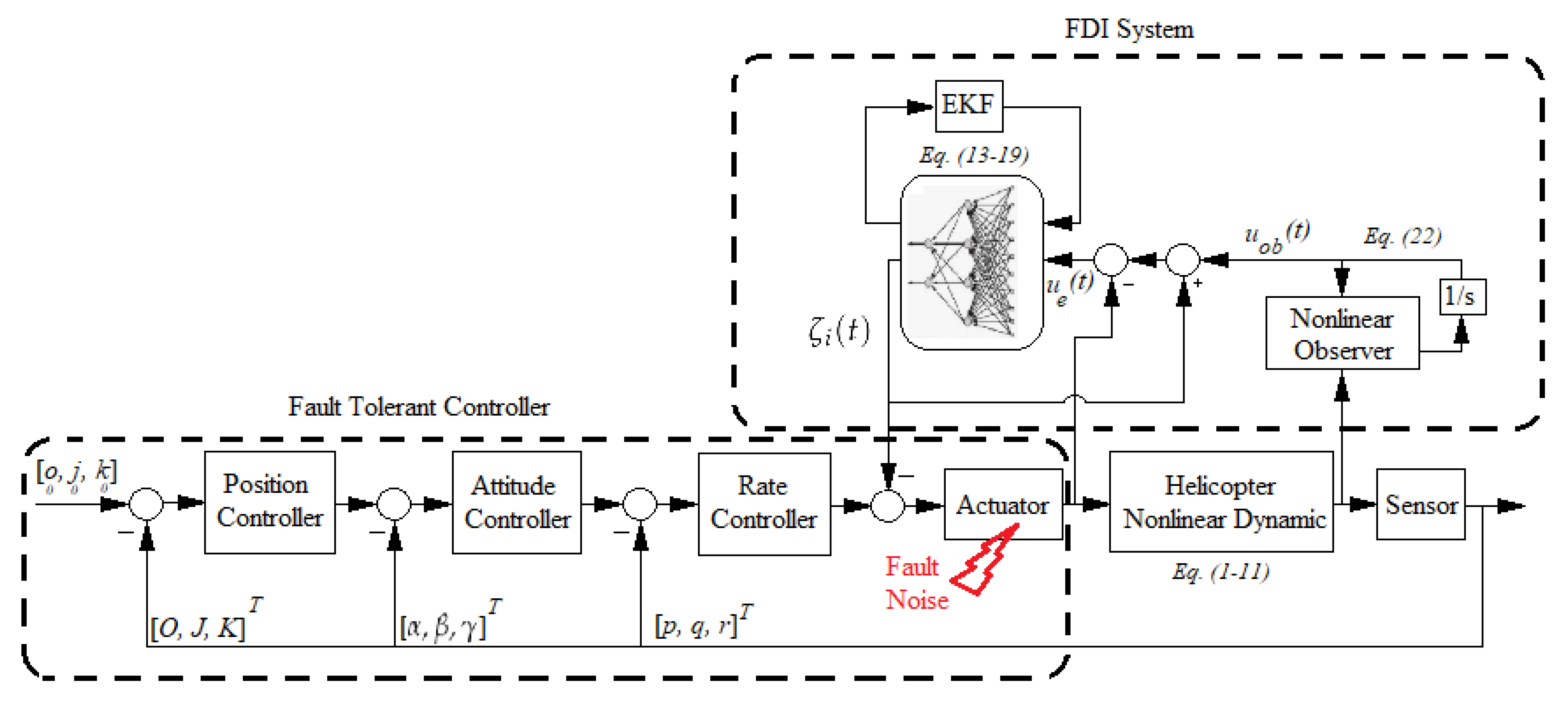
- Designing a new AFTC system based on a three-loop NDI to compensate for the occurred faults/false data in real time.
- (3)
- Using six DoF models to design the FDI and AFTC system, which makes the controller performance robust against nonlinearities and uncertainties in simplified and linear models.
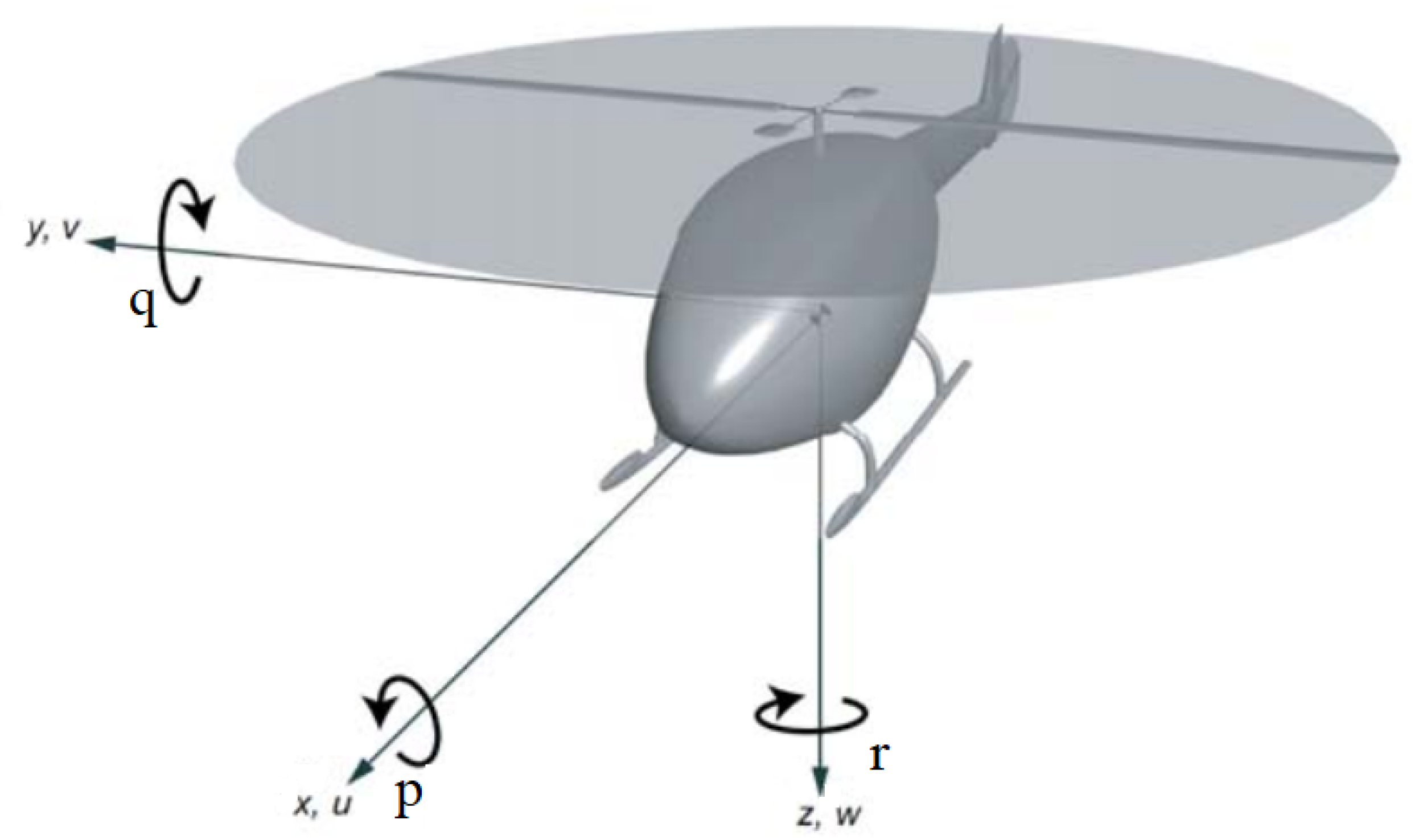
2. Helicopter Nonlinear Dynamic Model
3. Neural Network, EKF Adaptive Approach
3.1. Neural Network Adaptive Structure
3.2. EKF and Neural Network Weight Update
3.3. Fault Detection and Diagnostic Design for Actuator
4. Active Fault Tolerant Control Strategy
4.1. First Feedback Controller: Nonlinear Dynamic Inversion
4.1.1. Inner Control Loop
4.1.2. Outer Control Loop
4.2. Adaptive Fault Compensator Design
5. Implementation of the Proposed Method on Helicopter
5.1. Faults Description
5.1.1. Abrupt Faults
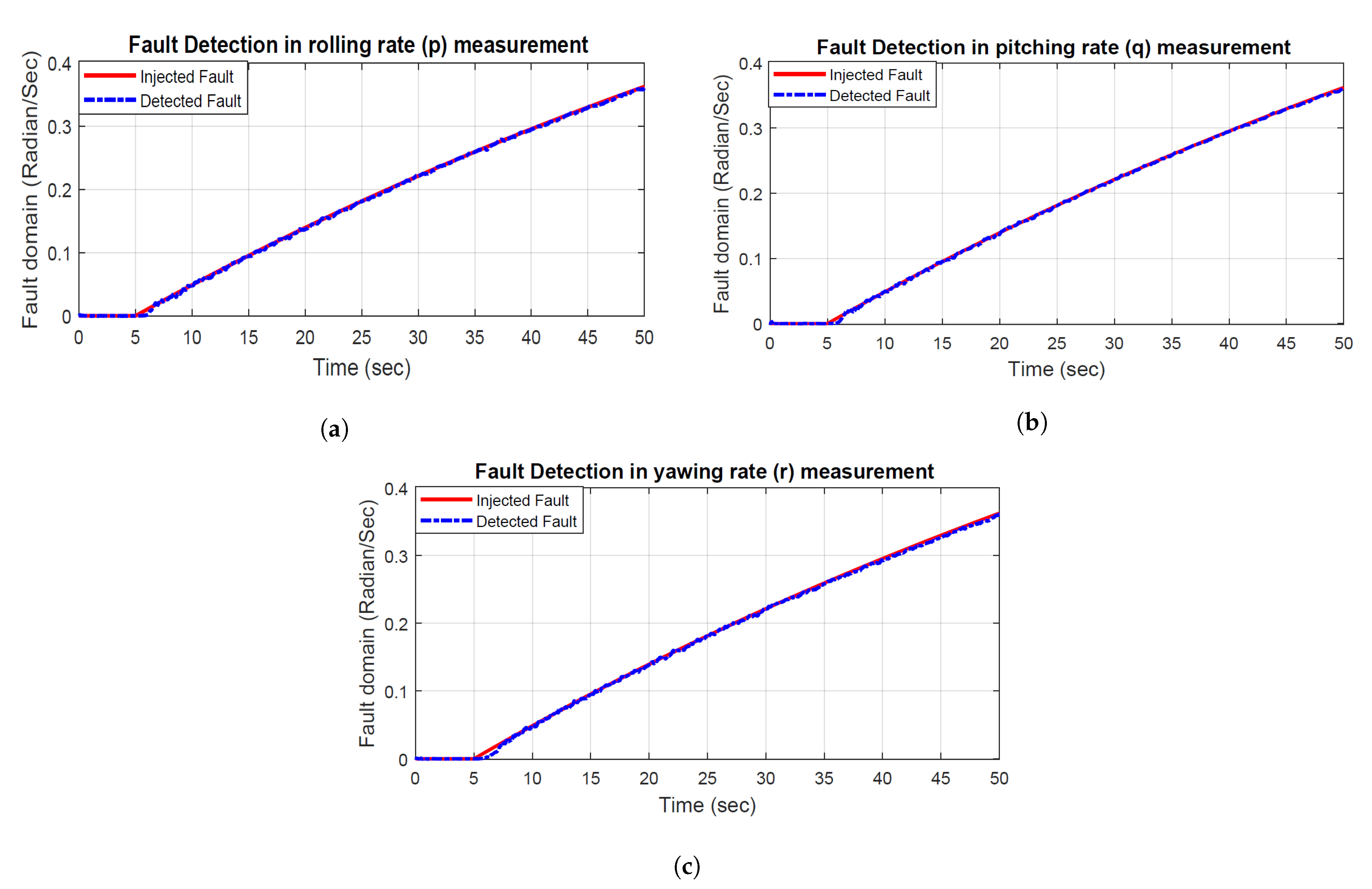
5.1.2. Incipient Faults
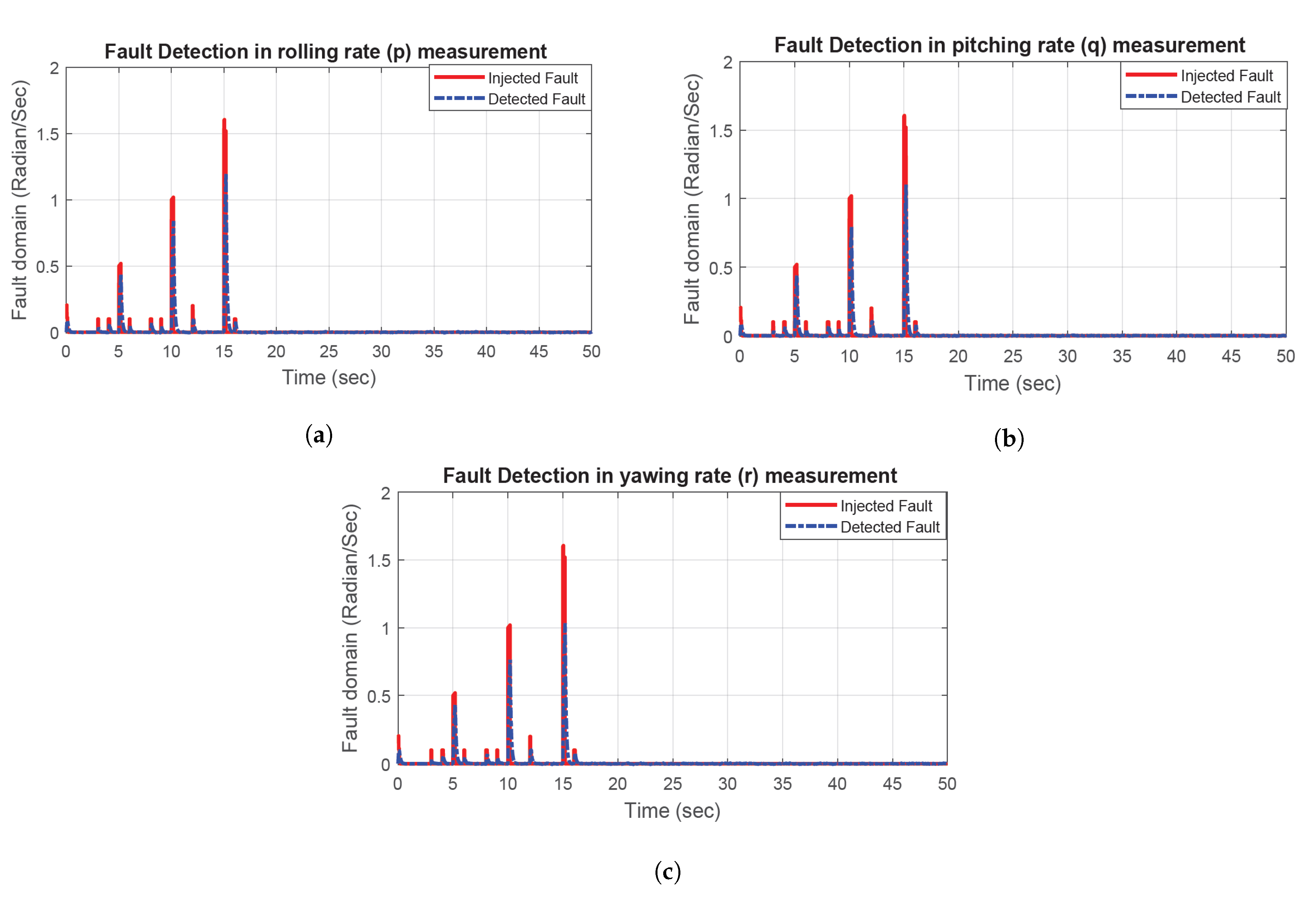
5.1.3. Intermittent Faults
5.2. Numerical Simulation
- (1)
- The helicopter blade is twisted along the length of the blade due to the unbalanced lift compensation.
- (2)
- The helicopter rotors are assumed as teetering rotors. This means the blades flap without any curve.
- (3)
- Since the wind speed is presumed to be zero and the air density is constant, there is no external force on the helicopter body.
- (4)
- Table 2 shows the used parameters for the rotor aerodynamics in the helicopter model simulation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Chen, M.; Shi, P.; Lim, C.C. Adaptive neural fault-tolerant control of a 3-DOF model helicopter system. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 260–270. [Google Scholar] [CrossRef] [Green Version]
- Gustafsson, F. Statistical Sensor Fusion, 1st ed.; Studentlitteratur: Lund, Sweden, 2010. [Google Scholar]
- Arafat, M.; Nafis, S.R.; Sadeghvaziri, E.; Tousif, F. A data-driven approach to calibrate microsimulation models based on the degree of saturation at signalized intersections. Transp. Res. Interdiscip. Perspect. 2020, 8, 100231. [Google Scholar] [CrossRef]
- Hadi, M.; Iqbal, M.S.; Wang, T.; Xiao, Y.; Arafat, M.; Afreen, S. Connected Vehicle Vehicle-to-Infrastructure Support of Active Traffic Management; National Transportation Library: Washington, DC, USA, 2019. [Google Scholar]
- Zhu, H.; Peng, X.; Chandrasekhar, V.; Li, L.; Lim, J.H. DehazeGAN: When Image Dehazing Meets Differential Programming. In Proceedings of the International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; pp. 1234–1240. [Google Scholar]
- Zhou, J.T.; Di, K.; Du, J.; Peng, X.; Yang, H.; Pan, S.J.; Tsang, I.; Liu, Y.; Qin, Z.; Goh, R.S.M. Sc2net: Sparse lstms for sparse coding. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Liu, Y.J.; Li, J.; Tong, S.; Chen, C.P. Neural network control-based adaptive learning design for nonlinear systems with full-state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1562–1571. [Google Scholar] [CrossRef]
- Abaspour, A.; Sadati, S.H.; Sadeghi, M. Nonlinear optimized adaptive trajectory control of helicopter. Control. Theory Technol. 2015, 13, 297–310. [Google Scholar] [CrossRef]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. Nonlinear model predictive control with neural network optimization for autonomous autorotation of small unmanned helicopters. IEEE Trans. Control. Syst. Technol. 2010, 19, 818–831. [Google Scholar] [CrossRef]
- Kadmiry, B.; Driankov, D. A fuzzy gain-scheduler for the attitude control of an unmanned helicopter. IEEE Trans. Fuzzy Syst. 2004, 12, 502–515. [Google Scholar] [CrossRef]
- Afshar, S.; Wasti, S.; Disfani, V. Coordinated EV Aggregation Management via Alternating Direction Method of Multipliers. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 882–887. [Google Scholar]
- Abbaspour, A.; Yen, K.K.; Forouzannezhad, P.; Sargolzaei, A. A neural adaptive approach for active fault-tolerant control design in uav. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3401–3411. [Google Scholar] [CrossRef]
- Mokhtari, S.; Yen, K.K. A Novel Bilateral Fuzzy Adaptive Unscented Kalman Filter and its Implementation to Nonlinear Systems with Additive Noise. In Proceedings of the 2020 IEEE Industry Applications Society Annual Meeting, Detroit, MI, USA, 10–16 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A Survey on Active Fault-Tolerant Control Systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Park, P.; Khadilkar, H.; Balakrishnan, H.; Tomlin, C.J. High Confidence Networked Control for Next Generation Air Transportation Systems. IEEE Trans. Autom. Control. 2014, 59, 3357–3372. [Google Scholar] [CrossRef] [Green Version]
- Rudin, K.; Ducard, G.J.; Siegwart, R.Y. Active Fault Tolerant Control with Imperfect Fault Detection Information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2792–2805. [Google Scholar] [CrossRef]
- Zeng, S.; Zhu, J. Adaptive compensated dynamic inversion control for a helicopter with approximate mathematical model. In Proceedings of the 2006 International Conference on Computational Inteligence for Modelling Control and Automation and International Conference on Intelligent Agents Web Technologies and International Commerce (CIMCA’06), Sydney, Australia, 28 November–1 December 2006; p. 208. [Google Scholar]
- Ren, B.; Ge, S.S.; Chen, C.; Fua, C.H.; Lee, T.H. Modeling, Control and Coordination of Helicopter Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Sreedhar, R.; Fernandez, B.; Masada, G.Y. Robust fault detection in nonlinear systems using sliding mode observers. In Proceedings of the IEEE International Conference on Control and Applications, Vancouver, BC, Canada, 13–16 September 1993; pp. 715–721. [Google Scholar]
- Mokhtari, S.; Abbaspour, A.; Yen, K.K.; Sargolzaei, A. A Machine Learning Approach for Anomaly Detection in Industrial Control Systems Based on Measurement Data. Electronics 2021, 10, 407. [Google Scholar] [CrossRef]
- Li, L.; Ding, S.X.; Yang, Y.; Peng, K.; Qiu, J. A fault detection approach for nonlinear systems based on data-driven realizations of fuzzy kernel representations. IEEE Trans. Fuzzy Syst. 2017, 26, 1800–1812. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Zhang, H. Neural network-based model-free adaptive fault-tolerant control for discrete-time nonlinear systems with sensor fault. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2351–2362. [Google Scholar] [CrossRef]
- Liu, X.; Han, J.; Zhang, H.; Sun, S.; Hu, X. Adaptive Fault Estimation and Fault-Tolerant Control for Nonlinear System With Unknown Nonlinear Dynamic. IEEE Access 2019, 7, 136720–136728. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Gastli, A.; Ben-Brahim, L.; Al-Emadi, N.; Gabbouj, M. Real-time fault detection and identification for MMC using 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2018, 66, 8760–8771. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Shi, P.; Lim, C.C. Novel neural networks-based fault tolerant control scheme with fault alarm. IEEE Trans. Cybern. 2014, 44, 2190–2201. [Google Scholar] [CrossRef]
- Guo, M.F.; Zeng, X.D.; Chen, D.Y.; Yang, N.C. Deep-learning-based earth fault detection using continuous wavelet transform and convolutional neural network in resonant grounding distribution systems. IEEE Sens. J. 2017, 18, 1291–1300. [Google Scholar] [CrossRef]
- Kamalasadan, S.; Swann, G.D.; Yousefian, R. A Novel System-Centric Intelligent Adaptive Control Architecture for Power System Stabilizer Based on Adaptive Neural Networks. IEEE Syst. J. 2014, 8, 1074–1085. [Google Scholar] [CrossRef]
- Abbaspour, A.; Aboutalebi, P.; Yen, K.K.; Sargolzaei, A. Neural adaptive observer-based sensor and actuator fault detection in nonlinear systems: Application in UAV. ISA Trans. 2017, 67, 317–329. [Google Scholar] [CrossRef]
- Liu, T.; Dai, Y.; Hong, G. Flight dynamic simulation of helicopter forward flight through microburst wind field. Adv. Mech. Eng. 2017, 9, 1687814017691212. [Google Scholar] [CrossRef] [Green Version]
- Ljung, L.; Söderström, T. Theory and Practice of Recursive Identification; MIT Press: Cambridge, MA, USA, 1983. [Google Scholar]
- Reiner, J.; Balas, G.J.; Garrard, W.L. Robust dynamic inversion for control of highly maneuverable aircraft. J. Guid. Control. Dyn. 1995, 18, 18–24. [Google Scholar] [CrossRef]
- Jiang, F.; Pourpanah, F.; Hao, Q. Design, Implementation, and Evaluation of a Neural-Network-Based Quadcopter UAV System. IEEE Trans. Ind. Electron. 2019, 67, 2076–2085. [Google Scholar] [CrossRef]
- Schumacher, C.; Khargonekar, P.; McClamroch, N. Stability analysis of dynamic inversion controllers using time-scale separation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Boston, MA, USA, 10 August–12 August 1998; p. 4322. [Google Scholar]
- Heredia, G.; Ollero, A. Detection of sensor faults in small helicopter UAVs using observer/Kalman filter identification. Math. Probl. Eng. 2011, 2011, 174618. [Google Scholar] [CrossRef]
- Naderi, M.S.; Gharehpetian, G.B.; Abedi, M.; Blackburn, T.R. Modeling and detection of transformer internal incipient fault during impulse test. Dielectr. Electr. Insul. IEEE Trans. 2008, 15, 284–291. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Yan, X.G.; Mao, Z. Sliding mode observer based incipient sensor fault detection with application to high-speed railway traction device. ISA Trans. 2016, 63, 49–59. [Google Scholar] [CrossRef]
- Johnson, E.N.; Kannan, S.K. Adaptive trajectory control for autonomous helicopters. J. Guid. Control. Dyn. 2005, 28, 524–538. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Roll, pitch, and yaw rates [rad/s] | |
| Roll, pitch, and yaw angles [rad] | |
| Lateral, and longitudinal flapping angle [rad] | |
| O, J, K | Rolling, pitching, and yawing moments [rad] |
| n | Blade lock number |
| m | Rotational speed of rotor |
| v | Remote controller commands vector |
| Lateral cyclic inputs [rad] | |
| Longitudinal cyclic inputs [rad] | |
| Pedal collective inputs of tail rotor [rad] | |
| Collective inputs of tail rotor [rad] | |
| , , | Lateral moment to |
| , , | Longitudinal moment to |
| , , | Pedal collective moment to |
| , , | Initial momentum values |
| Moments of inertia [kg.m] | |
| moment of inertia around plane |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 39.51 | −8.54 | 0.0013 | |||
| 8.54 | 39.51 | 0.0013 | |||
| 0.73 | −0.064 | −9.24 | |||
| 0.044 | −0.47 | 0.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mokhtari, S.; Abbaspour, A.; Yen, K.K.; Sargolzaei, A. Neural Network-Based Active Fault-Tolerant Control Design for Unmanned Helicopter with Additive Faults. Remote Sens. 2021, 13, 2396. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122396
Mokhtari S, Abbaspour A, Yen KK, Sargolzaei A. Neural Network-Based Active Fault-Tolerant Control Design for Unmanned Helicopter with Additive Faults. Remote Sensing. 2021; 13(12):2396. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122396
Chicago/Turabian StyleMokhtari, Sohrab, Alireza Abbaspour, Kang K. Yen, and Arman Sargolzaei. 2021. "Neural Network-Based Active Fault-Tolerant Control Design for Unmanned Helicopter with Additive Faults" Remote Sensing 13, no. 12: 2396. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122396