
Towards Sustainable Management of Mussel Farming through High-Resolution Images and Open Source Software—The Taranto Case Study

 ,
,  ,
, 
 and
and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
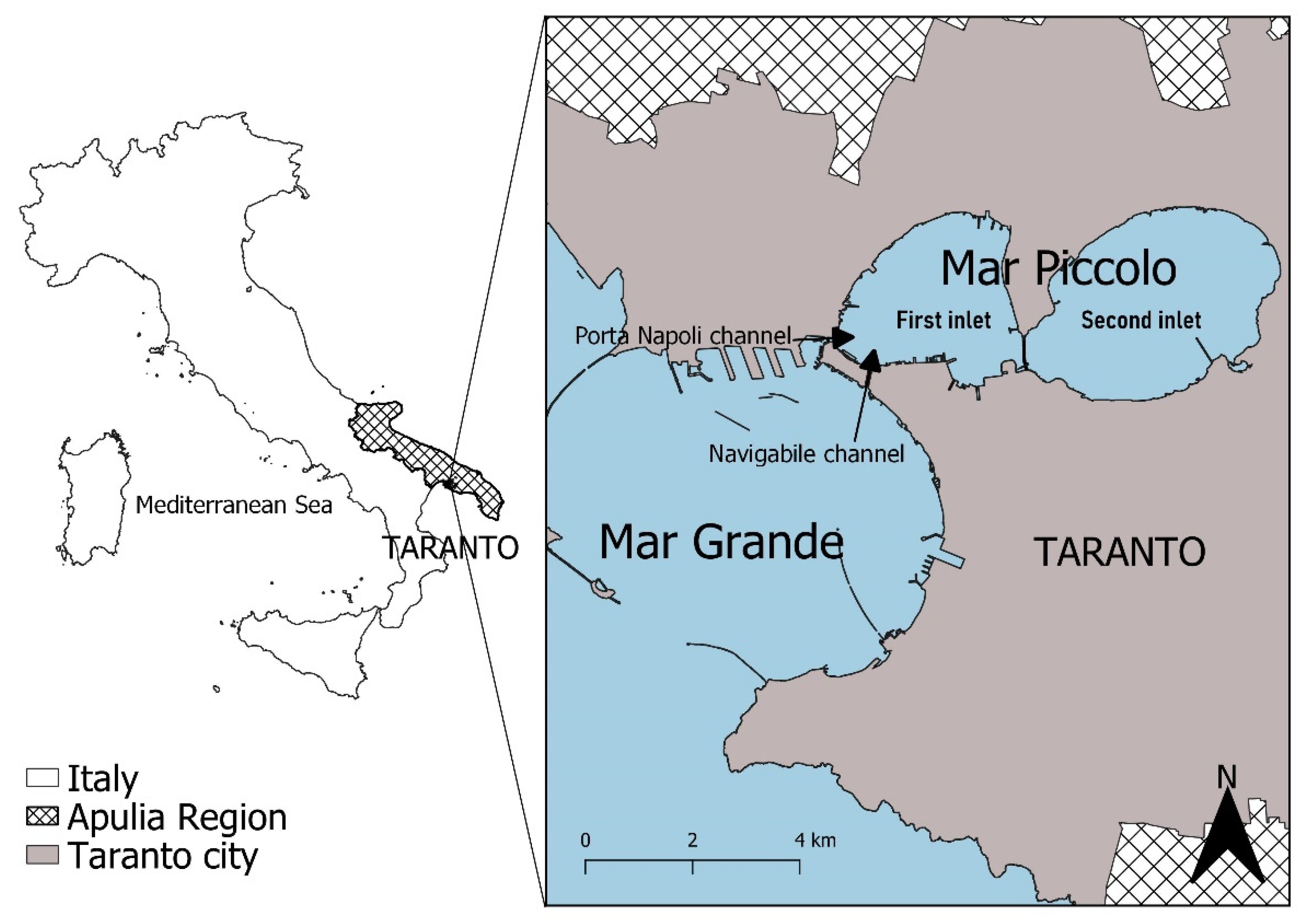
1.1. Framework and Criticalities of the Study Area
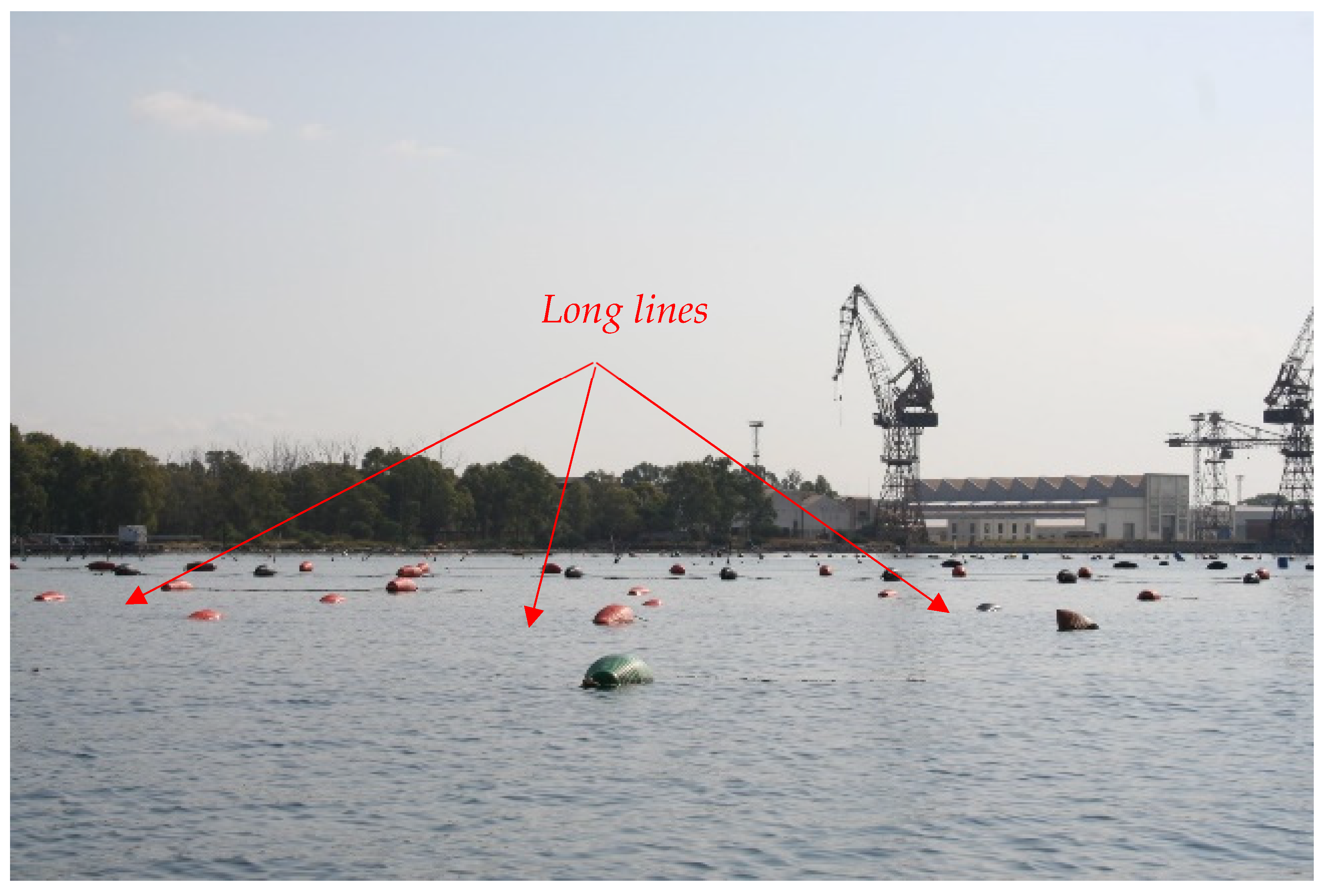
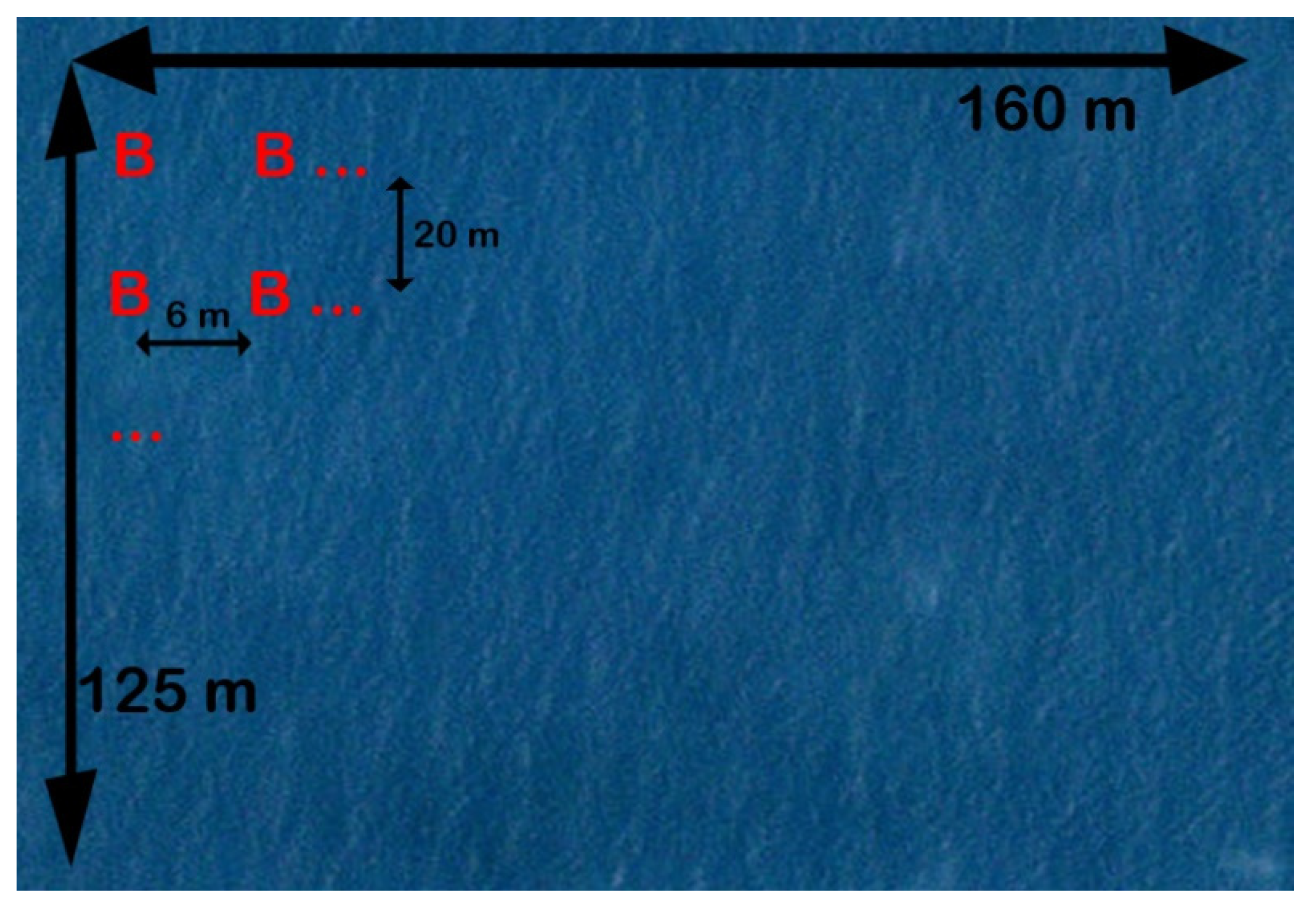
1.2. Mussel Farms of Mar Piccolo
1.3. Objectives of the Work
- realise a census of all the mussels farms in the first and second inlet of the Mar Piccolo providing accurate information on the number of units, the precise location through georeferentiation, the area, perimeter and density of mussel farms;
- identify and georeferencing abandoned cultivation fields for which navigation can be dangerous;
- identify illegal installations and provide details necessary to local port authorities to define the appropriate management interventions of the area
- detect any unauthorised anthropogenic action and environmental pressures that may alter the profile of the marine ecosystem in terms of overfishing
- plan strategies for the surveillance, remediation and restoration of the Mar Piccolo area
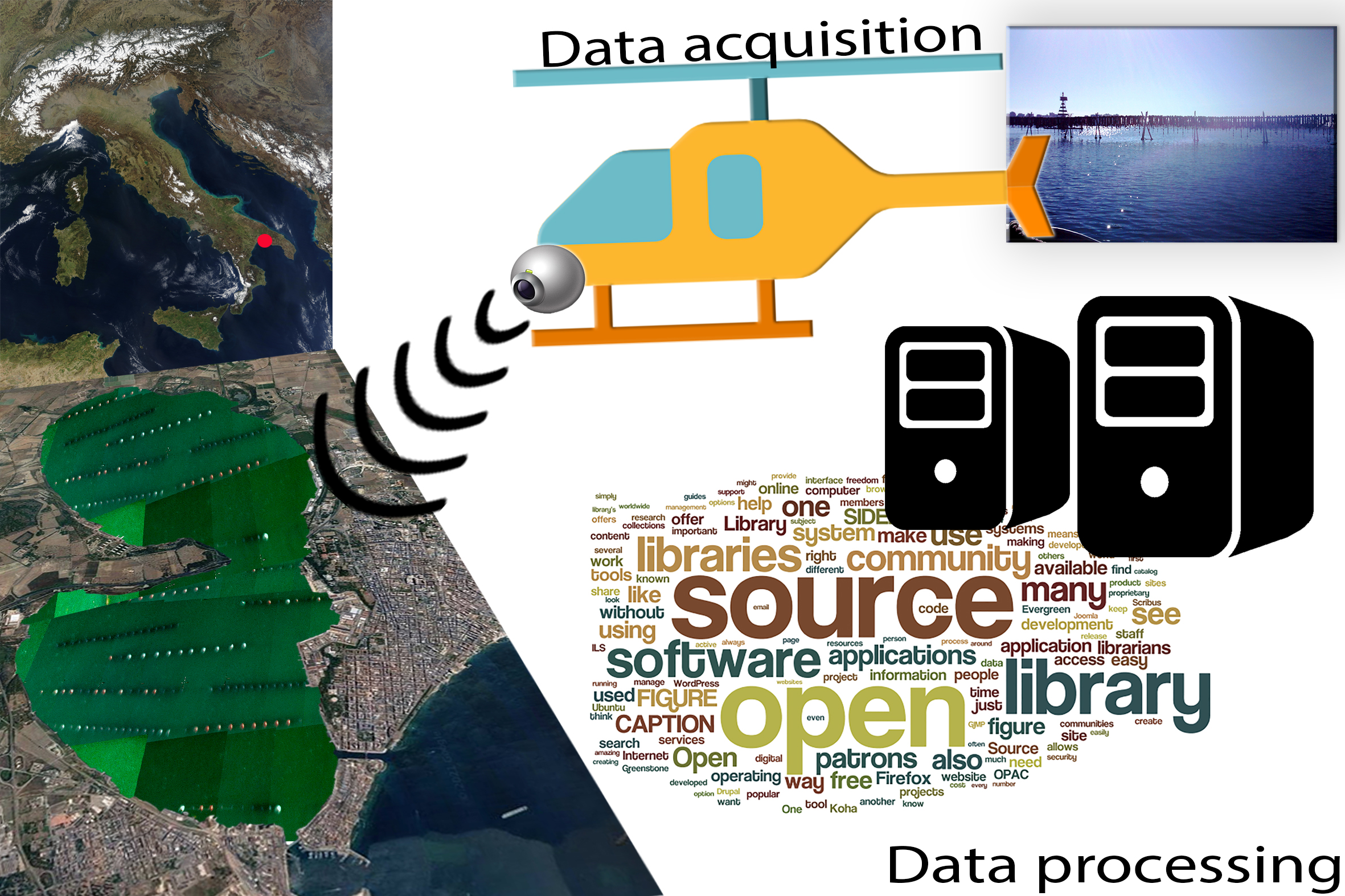
2. Materials and Methods
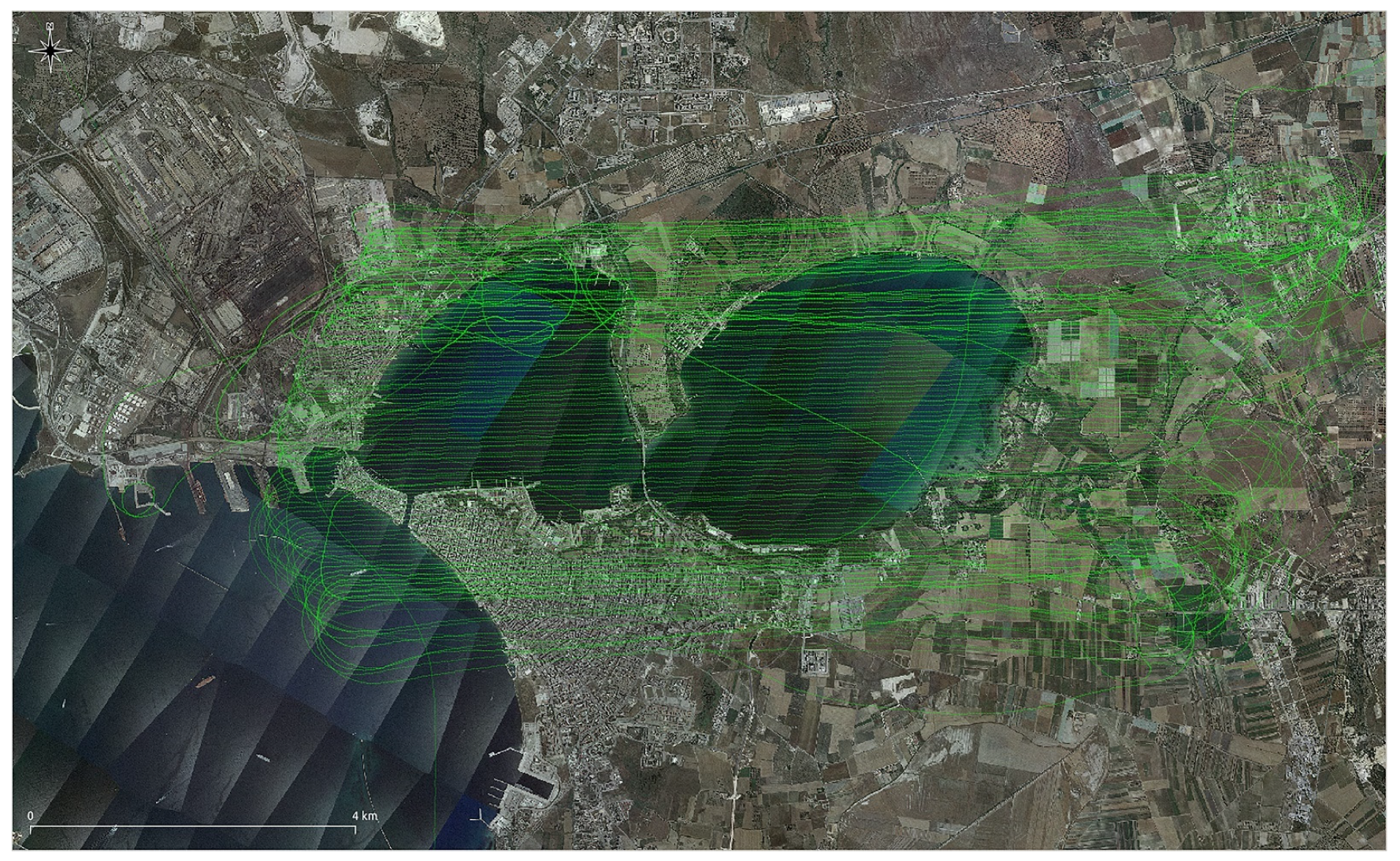
2.1. Data Acquisition
2.1.1. Sensor Characteristics
2.1.2. Planning of Flight
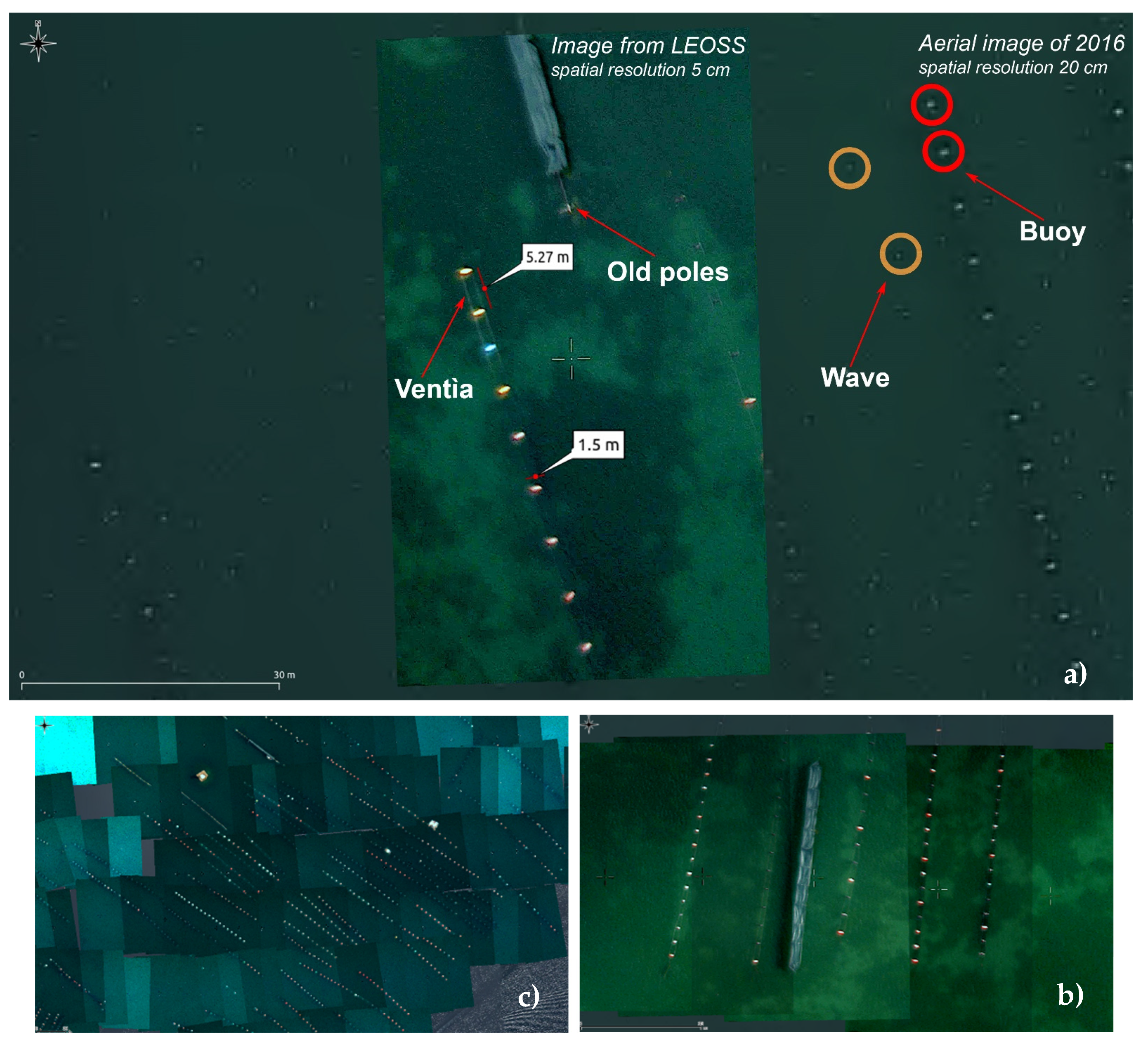
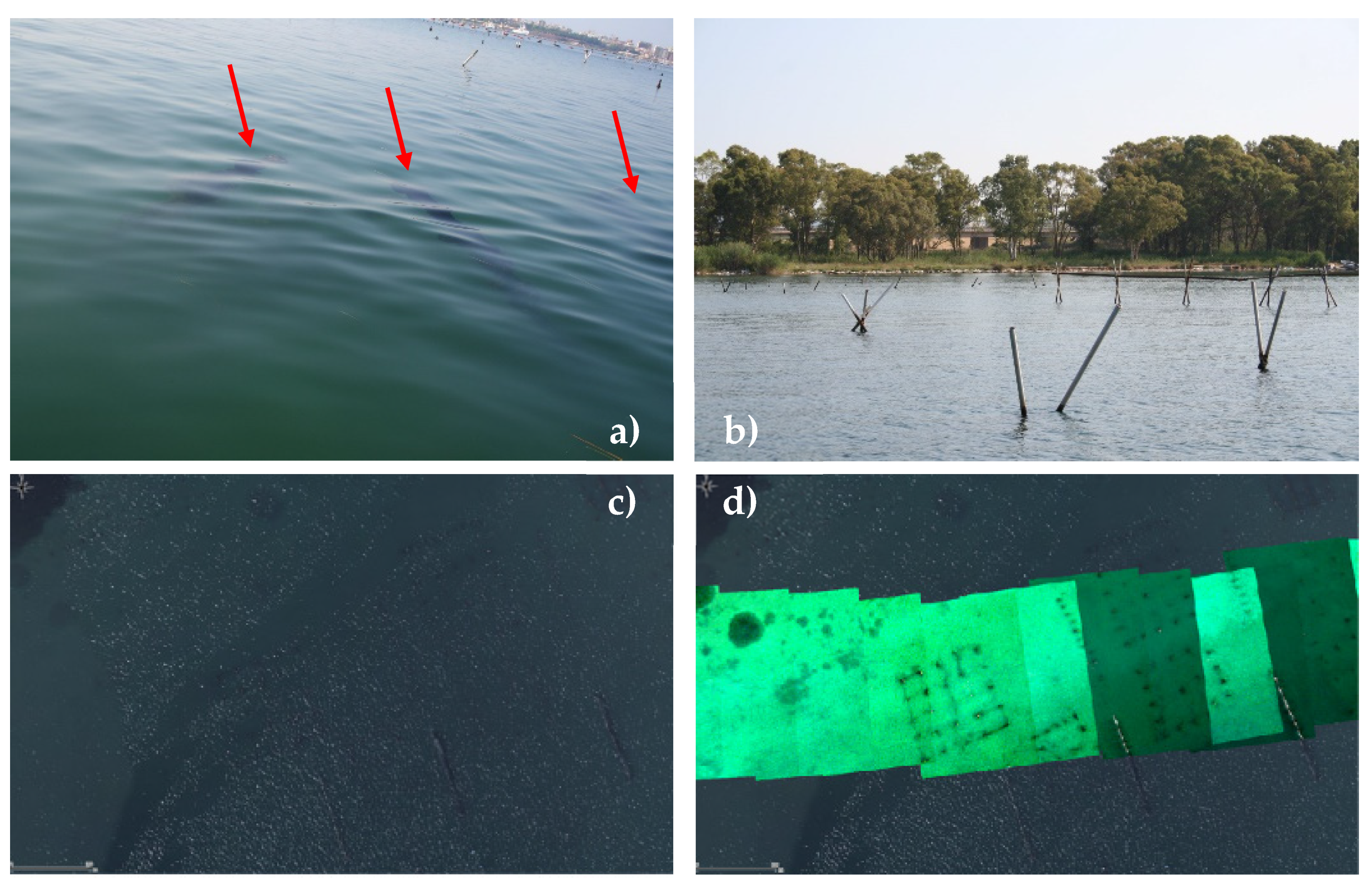
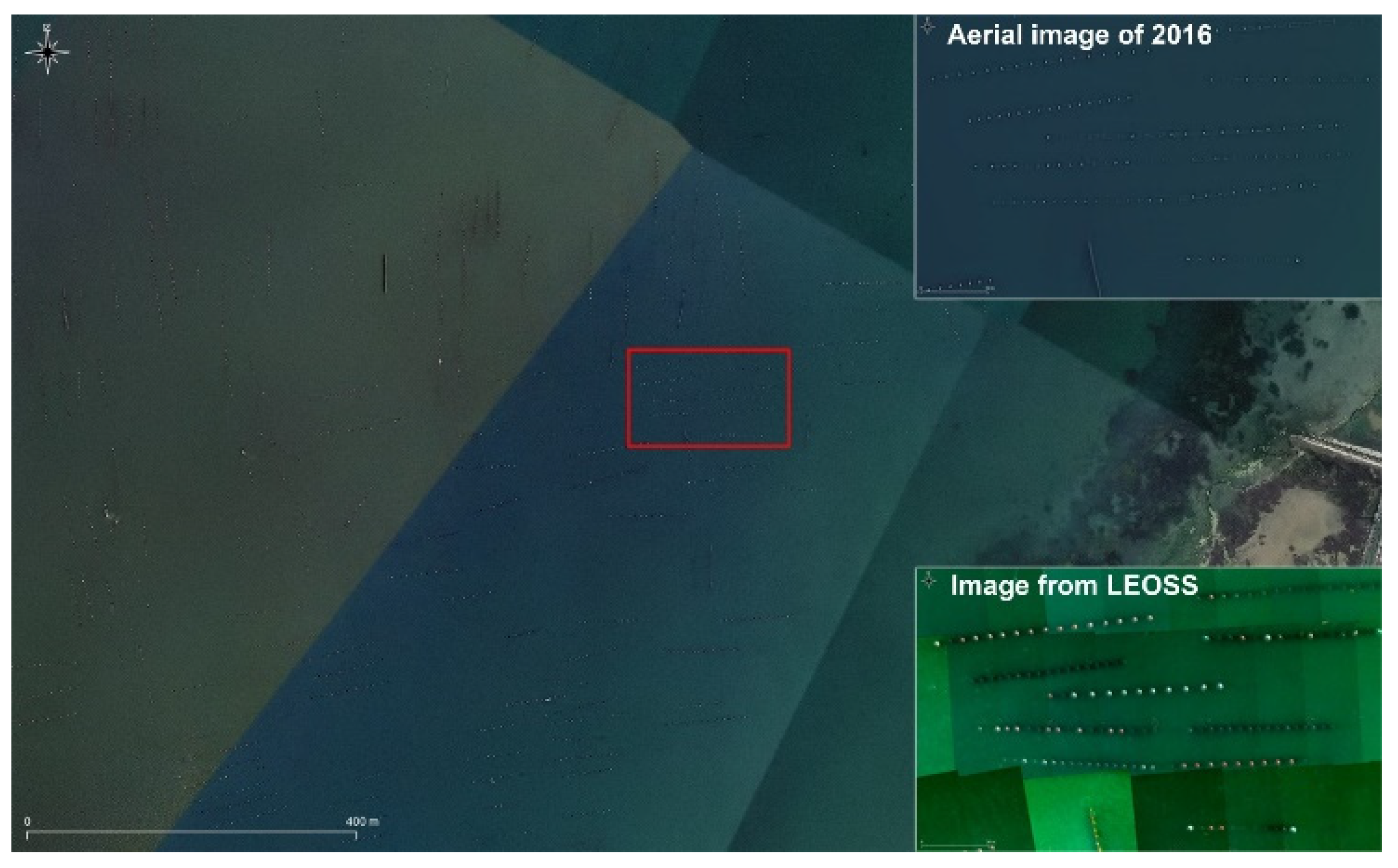
2.1.3. Field Inspections
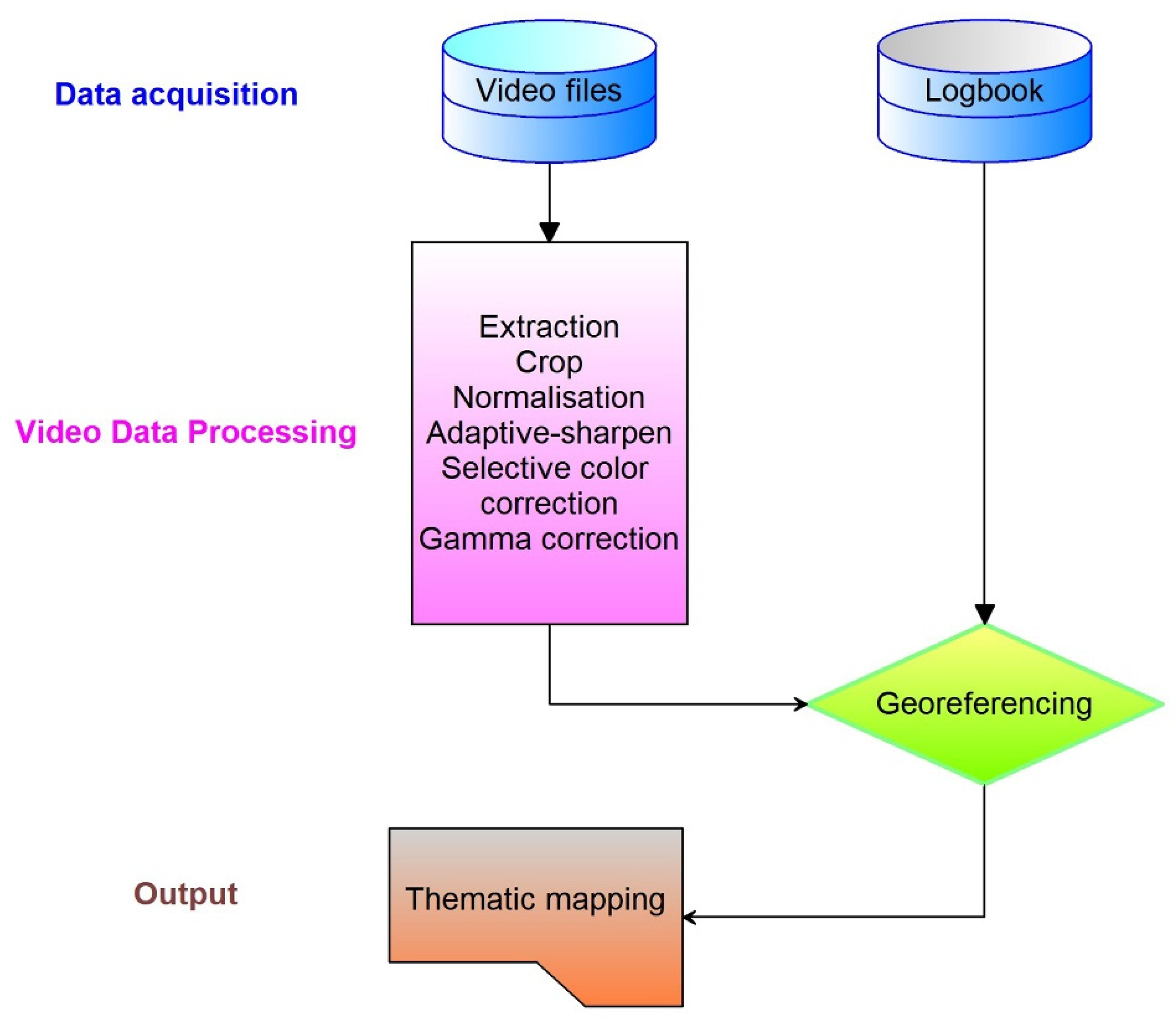
2.2. Image Processing
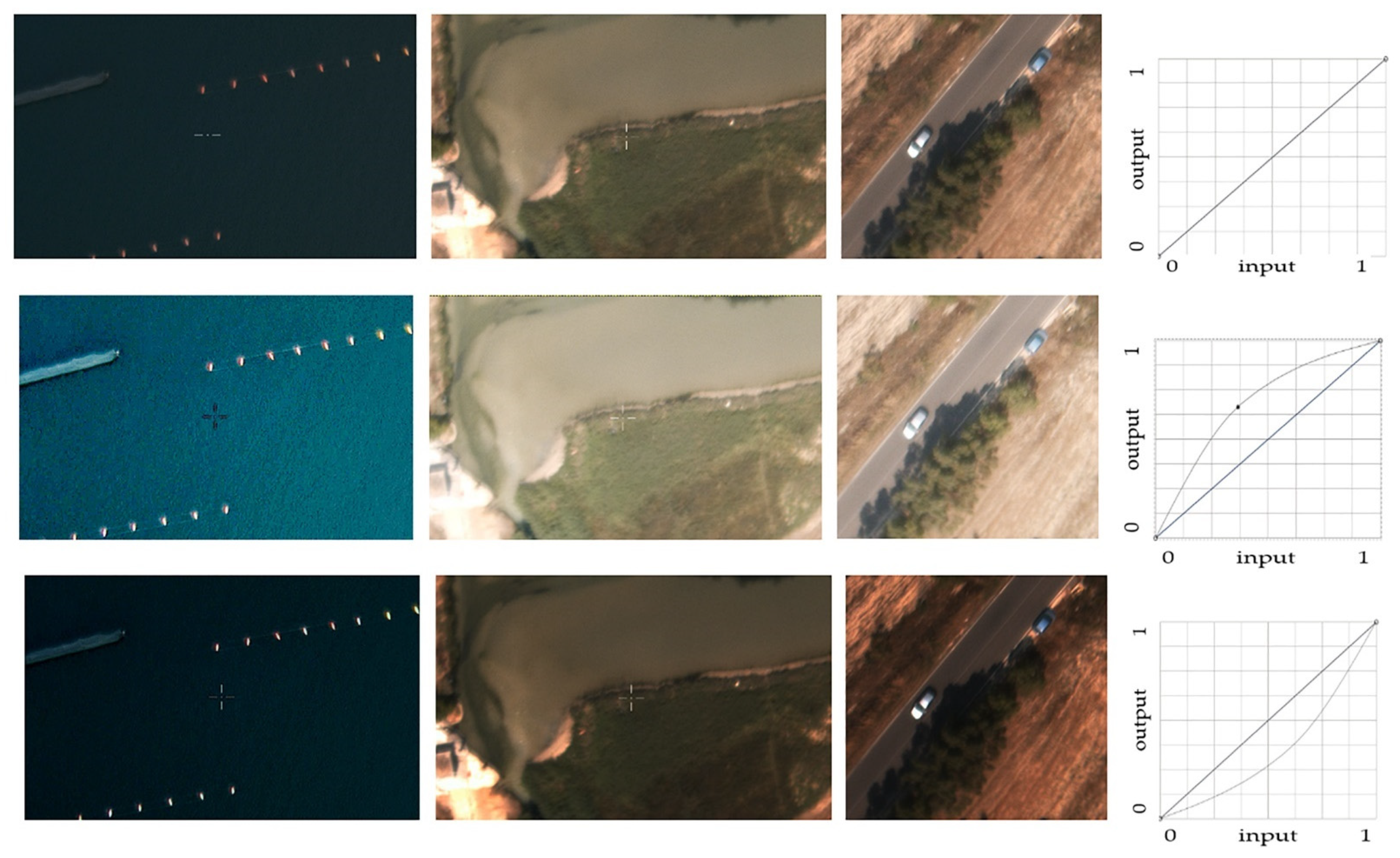
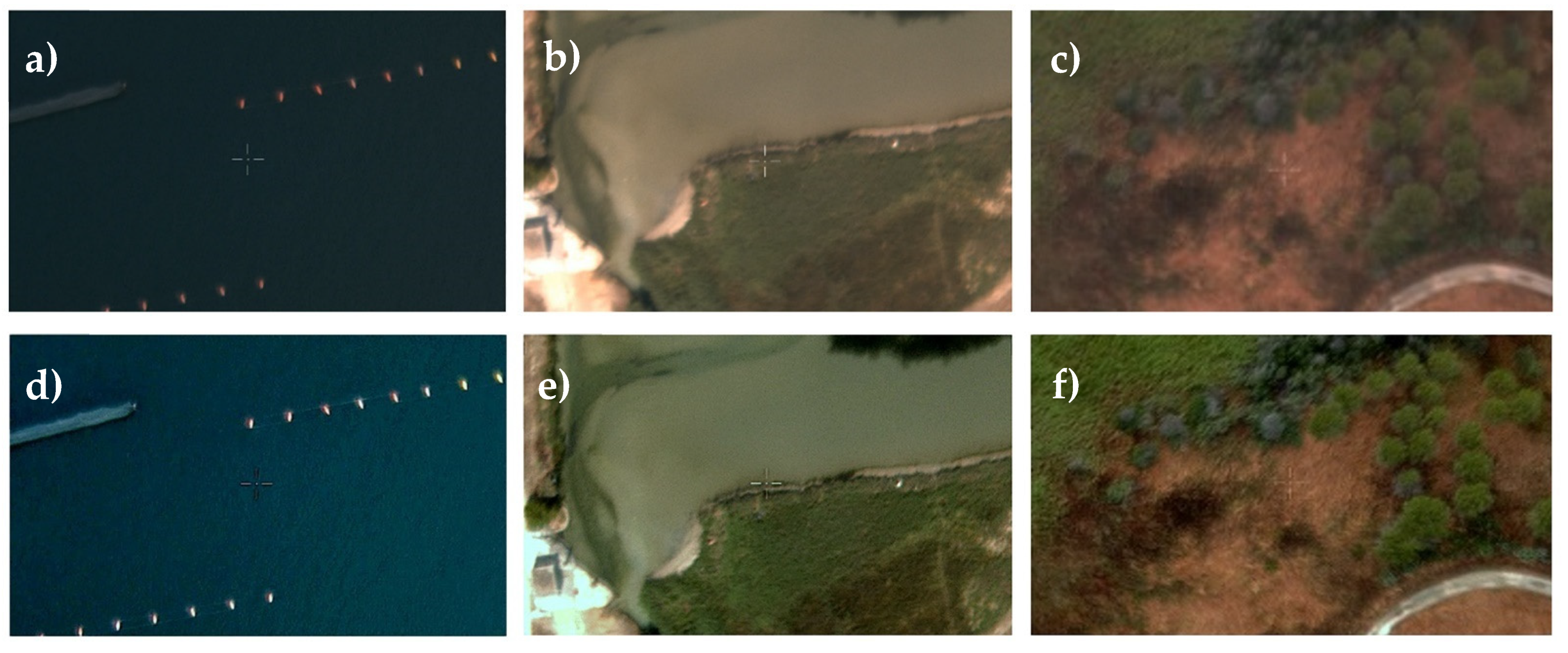
2.2.1. Video Data Processing
- IN new pixel value;
- I old pixel value;
- Min and Max are the minimum and maximum pixel value measured;
- newMin and newMax are the new minimum and maximum desired pixel values.
- γ gamma value;
- d log(Vout) logarithmic value of the digital signal in output;
- d log(Vin) logarithmic value of the digital signal in input.
2.2.2. Frames Georeferencing
- rotations (linear transformation), if we think to the sensor;
- translations (vector addition) if we think to the shift due to wind shifts;
- scale operations (linear transformation), introduced because the wide-angle lens created a difference in surfaces re-covered by the pixels, i.e. the central pixels cover less surface than the lateral ones.
- total framed width as a function of the shooting height;
- average coverage area of the pixel recorded on the monitor;
- calculation of the upper left corner upwards in degrees for final translation;
- semi-diagonal frame calculation;
- calculation of the number of base map pixels involved;
- calculation of the scale parameter between the two maps;
- correction factors for the above reasons.
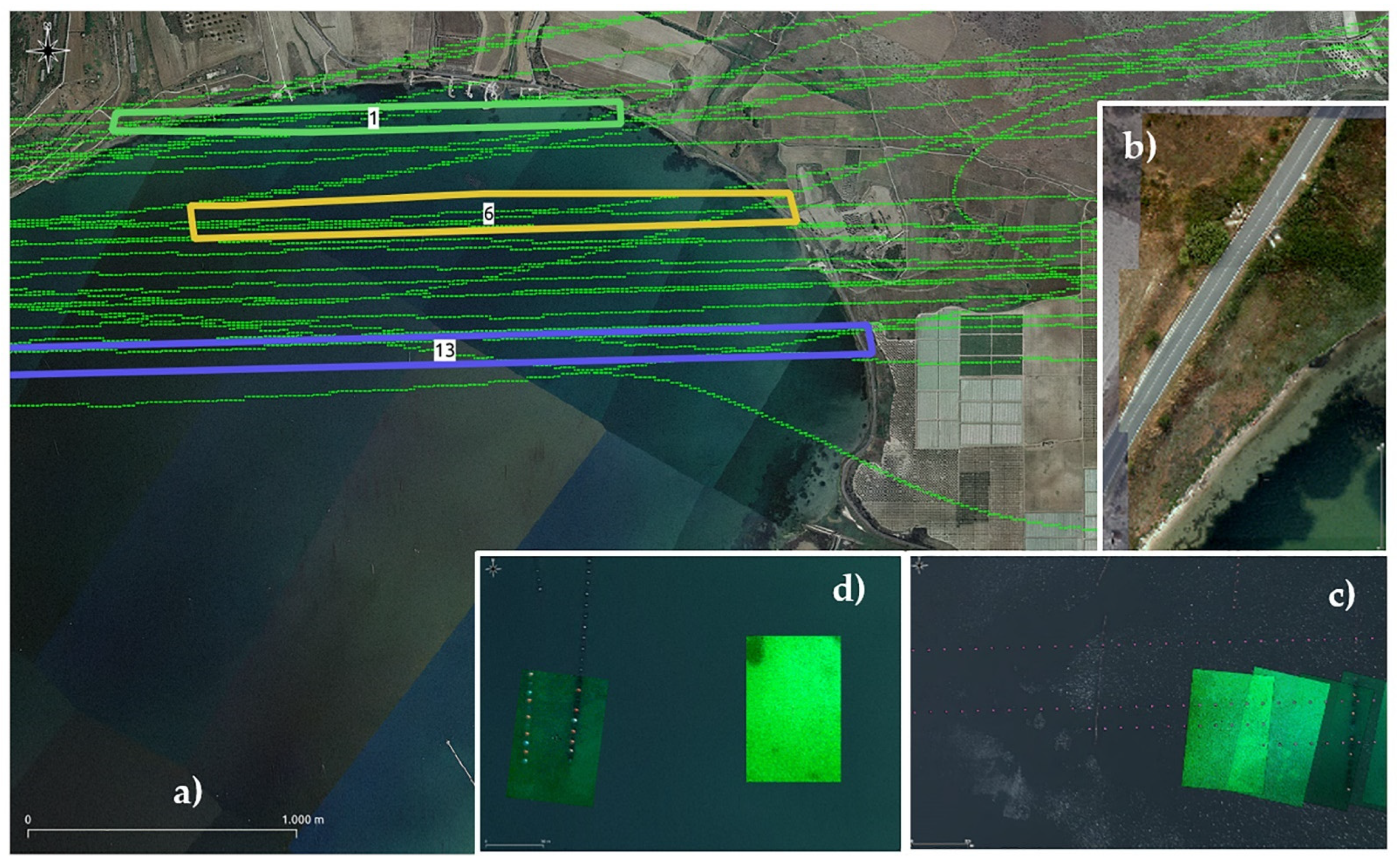
3. Results
4. Discussion
- Mapping of mussel crops (Figure 10) for a comparison with the authorised areas in the entire study area;
5. Conclusions
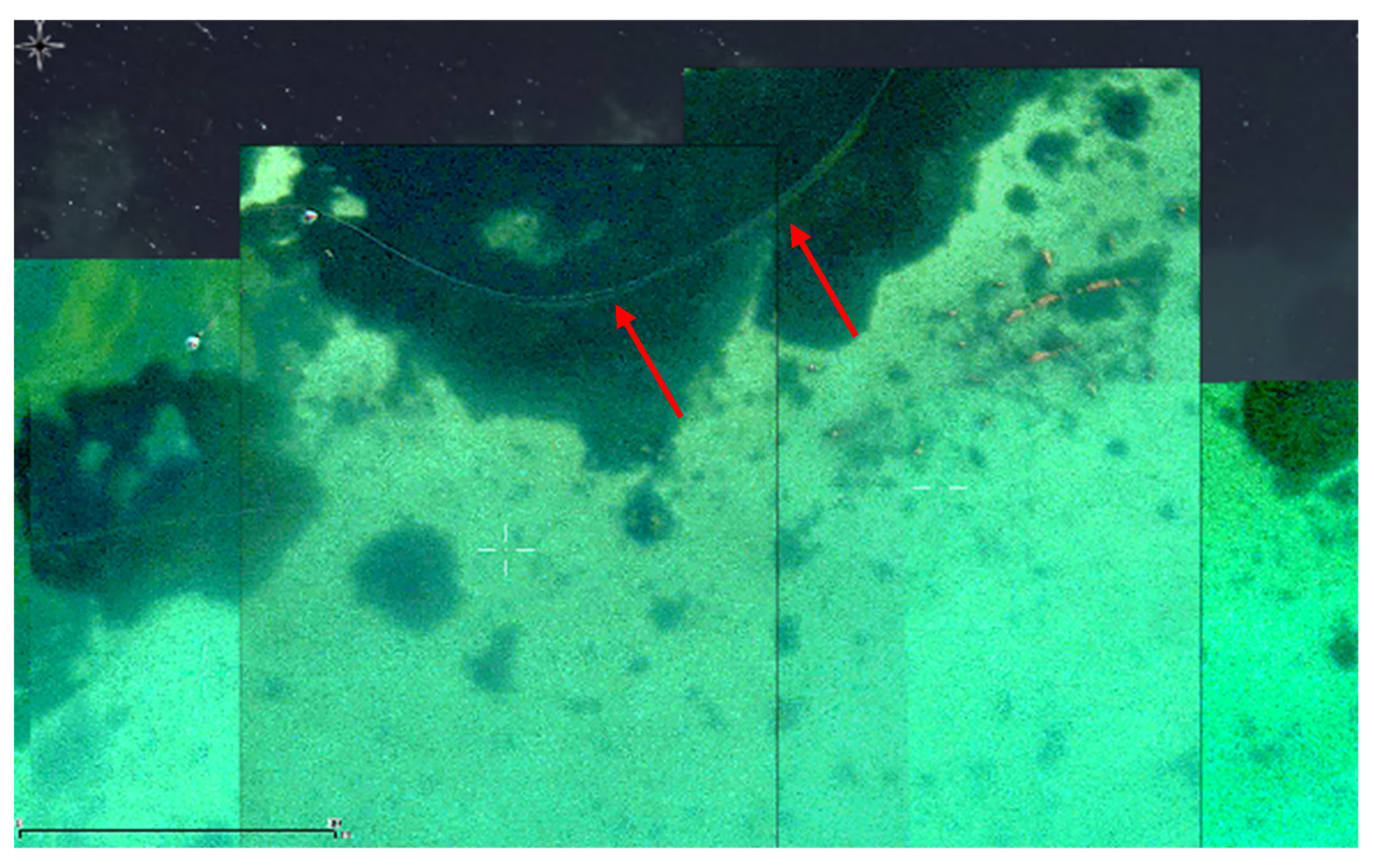
- identification of any illegal activities as the presence of the fishing net Figure 15;
- algal blooms and species of high ecological interest (phanerogams, biocenosis) that have been registered in the study area on the days of image acquisition;
- identification of unfavourable locations for mussel farm sites due to turbidity or potential development of harmful algal blooms (we could perform this also using historical series of satellite maps);
- identification and mapping of marine biocoenosis and phanerogams of high ecological interest
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, W.; Fu, B. Remote sensing for coastal area management in China. Coast. Manag. 2002, 30, 271–276. [Google Scholar] [CrossRef]
- Mumby, P.J.; Green, E.P.; Edwards, A.J.; Clark, C.D. The cost-effectiveness of remote sensing for tropical coastal resources assessment and management. J. Environ. Manag. 1999, 55, 157–166. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Colna, K.E.; El-Mezayen, M.M.; Laureano-Rosario, A.E.; Méndez-Lázaro, P.; Otis, D.B.; Toro-Farmer, G.; Vega-Rodriguez, M.; Muller-Karger, F.E. Satellite Remote Sensing for Coastal Management: A Review of Successful Applications. Environ. Manag. 2017, 60, 323–339. [Google Scholar] [CrossRef] [PubMed]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [Green Version]
- Transon, J.; d’Andrimont, R.; Maugnard, A.; Defourny, P. Survey of hyperspectral Earth Observation applications from space in the Sentinel-2 context. Remote Sens. 2018, 10, 157. [Google Scholar] [CrossRef] [Green Version]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent advances of hyperspectral imaging technology and applications in agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Fu, W.; Ma, J.; Chen, P.; Chen, F. Remote Sensing Satellites for Digital Earth. In Manual of Digital Earth; Springer: Singapore, 2020. [Google Scholar]
- Gholizadeh, A.; Kopačková, V. Detecting vegetation stress as a soil contamination proxy: A review of optical proximal and remote sensing techniques. Int. J. Environ. Sci. Technol. 2019, 16. [Google Scholar] [CrossRef]
- Chang, J.; Clay, E.D. Matching ReMatching Remote Sensing to Problems-Remote Sensing to Problems November 2016. In iGrow Corn: Best Management Practices; Clay, E.D., Clay, S.A., Carlson, C.G., Byamukama, E., Eds.; South Dakota State University: Brookings, South Dakota, 2016. [Google Scholar]
- Haji Gholizadeh, M.; Melesse, A.M.; Reddi, L. Spaceborne and airborne sensors in water quality assessment. Int. J. Remote Sens. 2016, 37, 3143–3180. [Google Scholar] [CrossRef]
- Grant, J.; Bacher, C.; Ferreira, J.G.; Groom, S.; Morales, J.; Rodriguez-Benito, C.; Saitoh, S.-I.; Sathyendranath, S.; Stuart, V. Remote Sensing Applications in Marine Aquaculture-Remote Sensing in Fisheries and Aquaculture—Chapter 6 Remote Sensing Applications in Marine Aquaculture; Forget, M.-H., Stuart, V., Platt, T., Eds.; IOCCG: Dartmouth, NS, Canada, 2009. [Google Scholar]
- Suplicy, F.M. A review of the multiple benefits of mussel farming. Rev. Aquac. 2020, 12, 204–223. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Aquaculture: Relevance, distribution, impacts and spatial assessments-A review. Ocean. Coast. Manag. 2016, 119, 244–266. [Google Scholar] [CrossRef]
- Nikolaidis, G.; Koukaras, K.; Aligizaki, K.; Heracleous, A.; Kalopesa, E.; Moschandreou, K.; Tsolaki, E.; Mantoudis, A. Harmful microalgal episodes in Greek coastal waters. J. Biol. Res. 2005, 3, 77–85. [Google Scholar]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. A review of remote sensing for the assessment and management of tropical coastal resources. Coast. Manag. 1996, 24, 1–40. [Google Scholar] [CrossRef]
- Cerruti, A. Le sorgenti sottomarine (Citri) del Mar Grande e Mar Piccolo di Taranto. Ann. Ist. Super. Nav. Di Napoli 1938, 7, 171–196. [Google Scholar]
- Spizzico, M.; Tinelli, R. Hydrogeology of Galese spring, Mar Piccolo of Taranto (South Italy). In Proceedings of the 9th Salt Water Intrusion Meet, Delft, The Netherlands, 12–16 May 1986. Water Manag. Group Delft Univ. Technol.: Delft, The Netherlands, 1986; pp. 85–97. [Google Scholar]
- Massarelli, C.; Matarrese, R.; Uricchio, V.F.; Vurro, M. GRASS GIS processing to detect thermal anomalies with TABI sensor. Conf. FOSS4G Eur. Como 2015, 1, 477–482. [Google Scholar]
- Zuffianò, L.E.; Basso, A.; Casarano, D.; Dragone, V.; Limoni, P.P.; Romanazzi, A.; Santaloia, F.; Polemio, M. Integrated Environmental Characterization of the Contaminated Marine Coastal Area of Taranto, Ionian Sea (Southern Italy)-The RITMARE Project. Environ. Sci. Pollut. Res. 2016, 12491–12494. [Google Scholar] [CrossRef]
- Valenzano, E.; D’Onghia, M.; De Giosa, F.; Demonte, P. Morfologia Delle Sorgenti Sottomarine Dell’area di Taranto (Mar Ionio). Mem. Descr. Carta Geol. d’It. 2020, 105, 65–69. [Google Scholar]
- ARPA-Puglia. Approfondimento Tecnico-Scientifico Sulle Interazioni tra il Sistema Ambientale ed i Flussi di Contaminanti da Fonti Primarie e Secondarie. Elaborazione di un Modello Concettuale Sito-Specifico; Ecomondo—ReclaimEXPO: Rimini, Italy, 2014. [Google Scholar]
- Cardellicchio, N.; Buccolieri, A.; Giandomenico, S.; Lopez, L.; Pizzulli, F.; Spada, L. Organic pollutants (PAHs, PCBs) in sediments from the Mar Piccolo in Taranto (Ionian Sea, Southern Italy). Mar. Pollut. Bull. 2007, 55, 451–458. [Google Scholar] [CrossRef]
- Parenzan, P. Parenzan Il Mar Piccolo e il Mar Grande di Taranto. Thalass. Salentina 1969, 3. [Google Scholar] [CrossRef]
- Caroppo, C.; Giordano, L.; Palmieri, N.; Bellio, G.; Bisci, A.P.; Portacci, G.; Sclafani, P.; Hopkins, T.S. Progress toward sustainable mussel aquaculture in Mar Piccolo, Italy. Ecol. Soc. 2012, 17. [Google Scholar] [CrossRef] [Green Version]
- Giordano, L.; Portacci, G.; Caroppo, C. Multidisciplinary tools for sustainable management of an ecosystem service: The case study of mussel farming in the Mar Piccolo of Taranto (Mediterranean, Ionian Sea). Ocean. Coast. Manag. 2019, 176, 11–23. [Google Scholar] [CrossRef]
- Portacci, G. Contabilizzazione Dei Servizi Ecosistemici: Il Caso Della Molluschicoltura Environmental-Accounting of the Ecosystem Services; 48° Congresso della Societá Italiana di Biologia Marina: Rome, Italy, 2017. [Google Scholar]
- Guardia Costiera Taranto. Capitaneria di Porto di Taranto. 2005. Available online: https://www.guardiacostiera.gov.it/Taranto/Pages/ordinanze.aspx (accessed on 20 June 2021).
- Regione Pugia. Ordinanza del Presidente Della Giunta Regionale, n. 532: Misure Sanitarie Straordinarie di Controllo del Rischio Per Diossina e PCB Nelle Produzioni di Mitili di Taranto. BURP: Regione Pugia, Italy, 2018.
- European Parliament and Council of Europe. Corrigendum to Regulation (EC) No 854/2004 of the European Parliament and of the Council of 29 April 2004 Laying Down Specific Rules for the Organisation of Official Controls on Products of Animal Origin Intended for Human Consumption. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2004:226:0083:0127:EN:PDF (accessed on 20 June 2021).
- Spirkovski, Z.; Ilik-Boeva, D.; Ritterbusch, D.; Peveling, R.; Pietrock, M. Ghost net removal in ancient Lake Ohrid: A pilot study. Fish. Res. 2019, 211, 46–50. [Google Scholar] [CrossRef]
- Tecniche, A.N.D.I.; Giuseppe, O.A.; Lobasso, V.; Melucci, R.; Fabrizio Manzulli, I. DI NTA PCC. 2020. Available online: https://www.comune.taranto.it/attachments/article/3378/RELAZIONE%20%20PCC%20TARANTO_DIC_2020.pdf (accessed on 3 June 2021).
- Mali, M.; Dell’Anna, M.M.; Notarnicola, M.; Damiani, L.; Mastrorilli, P. Combining chemometric tools for assessing hazard sources and factors acting simultaneously in contaminated areas. Case study: “Mar Piccolo” Taranto (South Italy). Chemosphere 2017, 184, 784–794. [Google Scholar] [CrossRef] [PubMed]
- Di Leo, A.; Cardellicchio, N.; Giandomenico, S.; Spada, L. Mercury and methylmercury contamination in Mytilus galloprovincialis from Taranto Gulf (Ionian Sea, Southern Italy): Risk evaluation for consumers. Food Chem. Toxicol. 2010, 48, 3131–3136. [Google Scholar] [CrossRef]
- Cardellicchio, N.; Buccolieri, A.; Di Leo, A.; Giandomenico, S.; Spada, L. Levels of metals in reared mussels from Taranto Gulf (Ionian Sea, Southern Italy). Food Chem. 2008, 107, 890–896. [Google Scholar] [CrossRef]
- Republic Italian National Law n. 426/1998. In Nuovi Interventi in Campo Ambientale; Gazzetta Ufficiale n. 291del 14 dicembre 1998; 1998. Available online: https://www.mite.gov.it/sites/default/files/archivio/normativa/legge_09121998_426.pdf (accessed on 3 June 2021).
- Cotecchia, F.; Vitone, C.; Sollecito, F.; Mali, M.; Miccoli, D.; Petti, R.; Milella, D.; Ruggieri, G.; Bottiglieri, O.; Santaloia, F.; et al. A geo-chemo-mechanical study of a highly polluted marine system (Taranto, Italy) for the enhancement of the conceptual site model. Sci. Rep. 2021, 11. [Google Scholar] [CrossRef] [PubMed]
- Labianca, C.; De Gisi, S.; Todaro, F.; Notarnicola, M. DPSIR Model Applied to the Remediation of Contaminated Sites. A Case Study: Mar Piccolo Taranto. Appl. Sci. 2020, 10, 5080. [Google Scholar] [CrossRef]
- Garen, P.; Robert, S.; Bougrier, S. Comparison of growth of mussel, Mytilus edulis, on longline, pole and bottom culture sites in the Pertuis Breton, France. Aquaculture 2004, 232, 511–524. [Google Scholar] [CrossRef] [Green Version]
- Konstantinou, Z.I.; Kombiadou, K. Rethinking suspended mussel-farming modelling: Combining hydrodynamic and bio-economic models to support integrated aquaculture management. Aquaculture 2020, 523, 735179. [Google Scholar] [CrossRef]
- Welcome to the Python GDAL/OGR Cookbook!—Python GDAL/OGR Cookbook 1.0 Documentation. Available online: http://pcjericks.github.io/py-gdalogr-cookbook/index.html# (accessed on 3 June 2021).
- GDAL—GDAL Documentation. Available online: https://gdal.org/index.html (accessed on 3 June 2021).
- FFmpeg License and Legal Considerations. Available online: https://ffmpeg.org/legal.html (accessed on 3 June 2021).
- GNU licenses. Available online: https://www.gnu.org/licenses/lgpl-3.0.txt (accessed on 1 June 2021).
- Ubuntu Server-for Scale Out Workloads | Ubuntu. Available online: https://ubuntu.com/server (accessed on 3 June 2021).
- Shi, Y.; Yang, H.; Gong, M.; Liu, X.; Xia, Y. A Fast and Robust Key Frame Extraction Method for Video Copyright Protection. J. Electr. Comput. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- FFmpeg Filters Documentation. Available online: https://ffmpeg.org/ffmpeg-filters.html#crop (accessed on 8 June 2021).
- The ImageMagick Development Team. Available online: https://imagemagick.org (accessed on 8 June 2021).
- Apache Licenses. Available online: https://www.apache.org/licenses/ (accessed on 3 June 2021).
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Pearson: London, UK, 2008; ISBN 978-0-13-168728-8. [Google Scholar]
- Al-Ameen, Z. Sharpness Improvement for Medical Images Using a New Nimble Filter. 3D Res. 2018, 9, 1–12. [Google Scholar] [CrossRef]
- Bull, D.R. Digital Picture Formats and Representations. In Communicating Pictures; Elsevier: Amsterdam, The Netherlands, 2014; pp. 99–132. [Google Scholar]
- Barnsley, M.F. Fractals Everywhere; Elsevier: Amsterdam, The Netherlands, 1993; ISBN 978-0-12-079061-6. [Google Scholar]
- Szeliski, R. Computer Vision; Texts in Computer Science; Springer: London, UK, 2011; ISBN 978-1-84882-934-3. [Google Scholar]
- Apulia Region Territorial Information System. Available online: http://www.sit.puglia.it/portal/portale_cartografie_tecniche_tematiche/WMS (accessed on 3 June 2021).
- GitHub-Gvellut/FreehandRasterGeoreferencer: QGIS Plugin for the Interactive Georeferencing of Rasters. Available online: https://github.com/gvellut/FreehandRasterGeoreferencer (accessed on 3 June 2021).
- Alexandridis, T.K.; Topaloglou, C.A.; Lazaridou, E.; Zalidis, G.C. The performance of satellite images in mapping aquacultures. Ocean Coast. Manag. 2008, 51, 638–644. [Google Scholar] [CrossRef]
- Corbelli, V.; Capasso, G.; Velardo, R. Talassografico “A. Cerruti”. In AUSL Taranto-Dipartimento di Prevenzione Disciplinare d’uso e Gestione Delle Aree Concesse per Attività di Mitilicoltura nel Mar Piccolo e Mar Grande di Taranto; BURP: Puglia Region, Italy, 2019. [Google Scholar]
- Guardia Costiera Taranto. Orders nn. 222/2009 and 107/2005; Guardia Costiera Taranto: Taranto, Italy, 2009. [Google Scholar]
- Konstantinou, Z.I.; Kombiadou, K.; Krestenitis, Y.N. Effective mussel-farming governance in Greece: Testing the guidelines through models, to evaluate sustainable management alternatives. Ocean Coast. Manag. 2015, 118, 247–258. [Google Scholar] [CrossRef]
- Regione autonoma della Sardegna. Acquacoltura in Sardegna. Tradizioni, Innovazione e ambiente; Laore Sardegna: Cagliari, Italy, 2016. [Google Scholar]
- Da Ros, L. LIFE-GHOST Project. Final Report; ISMAR Istituto di Scienze Marine: Venice, Italy, 2016. [Google Scholar]
- Retine in Bioplastica per la Mitilicoltura, Firmato un Protocollo D’intesa tra Comune di Taranto e Novamont. Available online: https://www.comune.taranto.it/index.php/elenco-news/3121-retine-in-bioplastica-per-la-mitilicoltura-firmato-un-protocollo-d-intesa-tra-comune-di-taranto-e-novamont (accessed on 14 June 2021).
- Heasman, K.G.; Scott, N.; Smeaton, M.; Goseberg, N.; Hildebrandt, A.; Vitasovich, P.; Elliot, A.; Mandeno, M.; Buck, B.H. New system design for the cultivation of extractive species at exposed sites-Part 1: System design, deployment and first response to high-energy environments. Appl. Ocean Res. 2021, 110, 102603. [Google Scholar] [CrossRef]
- Landmann, J.; Fröhling, L.; Gieschen, R.; Buck, B.H.; Heasman, K.; Scott, N.; Smeaton, M.; Goseberg, N.; Hildebrandt, A. New system design for the cultivation of extractive species at exposed sites-Part 2: Experimental modelling in waves and currents. Appl. Ocean Res. 2021, 113, 102749. [Google Scholar] [CrossRef]
- Dalton, G.; Bardócz, T.; Blanch, M.; Campbell, D.; Johnson, K.; Lawrence, G.; Lilas, T.; Friis-Madsen, E.; Neumann, F.; Nikitas, N.; et al. Feasibility of investment in Blue Growth multiple-use of space and multi-use platform projects; results of a novel assessment approach and case studies. Renew. Sustain. Energy Rev. 2019, 107, 338–359. [Google Scholar] [CrossRef]
- Montaudouin, X.; de Sandra, E. (Eds.) Shellfish aquaculture and the environment. Environ. Sci. Pollut. Res. 2014, 21, 7781–7783. [Google Scholar] [CrossRef]
- Jansen, H.M.; Van Den Burg, S.; Bolman, B.; Jak, R.G.; Kamermans, P.; Poelman, M.; Stuiver, M. The feasibility of offshore aquaculture and its potential for multi-use in the North Sea. Aquac. Int. 2016, 24, 735–756. [Google Scholar] [CrossRef] [Green Version]
- The National Recovery and Resilience Plan (NRRP)-Ministry of Economy and Finance. Available online: https://www.mef.gov.it/en/focus/The-National-Recovery-and-Resilience-Plan-NRRP/ (accessed on 22 July 2021).
- Tamburini, E.; Turolla, E.; Fano, E.A.; Castaldelli, G. Sustainability of Mussel (Mytilus Galloprovincialis) Farming in the Po River Delta, Northern Italy, Based on a Life Cycle Assessment Approach. Sustainability 2020, 12, 3814. [Google Scholar] [CrossRef]
- Comune di Taranto Avviso Pubblico Adozione Piano Comunale Delle Coste. Available online: https://www.comune.taranto.it/index.php/41-avvisi/3378-avviso-adozione-piano-comunale-delle-coste (accessed on 19 June 2021).
- Tadonki, C.; Lacassagne, L.; Dadi, E.; El Daoudi, M. Accelerator-based implementation of the Harris algorithm. In Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin, Heidelberg, 2012; Volume 7340, pp. 485–492. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massarelli, C.; Galeone, C.; Savino, I.; Campanale, C.; Uricchio, V.F. Towards Sustainable Management of Mussel Farming through High-Resolution Images and Open Source Software—The Taranto Case Study. Remote Sens. 2021, 13, 2985. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13152985
Massarelli C, Galeone C, Savino I, Campanale C, Uricchio VF. Towards Sustainable Management of Mussel Farming through High-Resolution Images and Open Source Software—The Taranto Case Study. Remote Sensing. 2021; 13(15):2985. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13152985
Chicago/Turabian StyleMassarelli, Carmine, Ciro Galeone, Ilaria Savino, Claudia Campanale, and Vito Felice Uricchio. 2021. "Towards Sustainable Management of Mussel Farming through High-Resolution Images and Open Source Software—The Taranto Case Study" Remote Sensing 13, no. 15: 2985. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13152985