
A New Method for Automated Measurement of Sand Dune Migration Based on Multi-Temporal LiDAR-Derived Digital Elevation Models


Abstract
:
1. Introduction
2. Study Area and Data
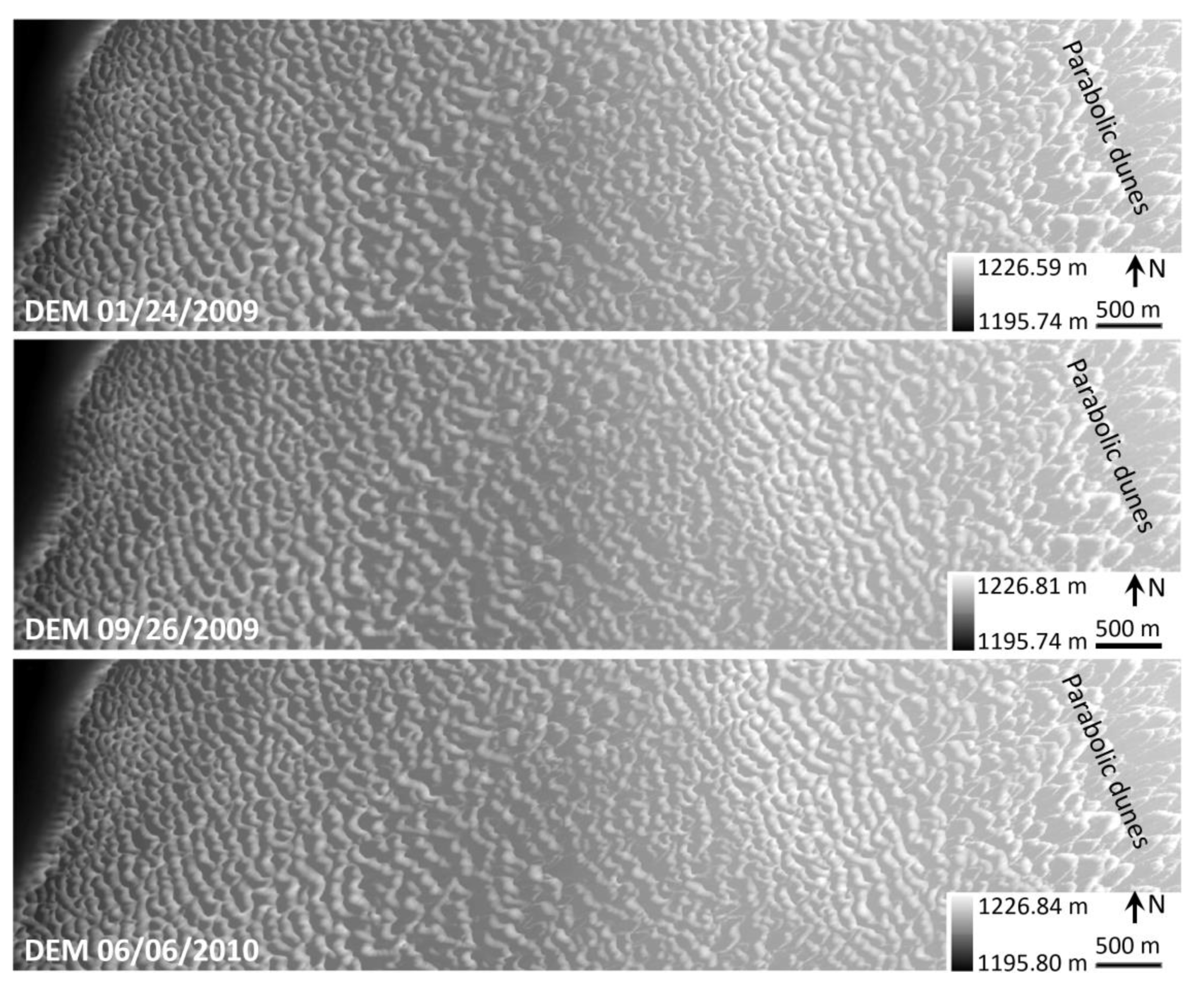
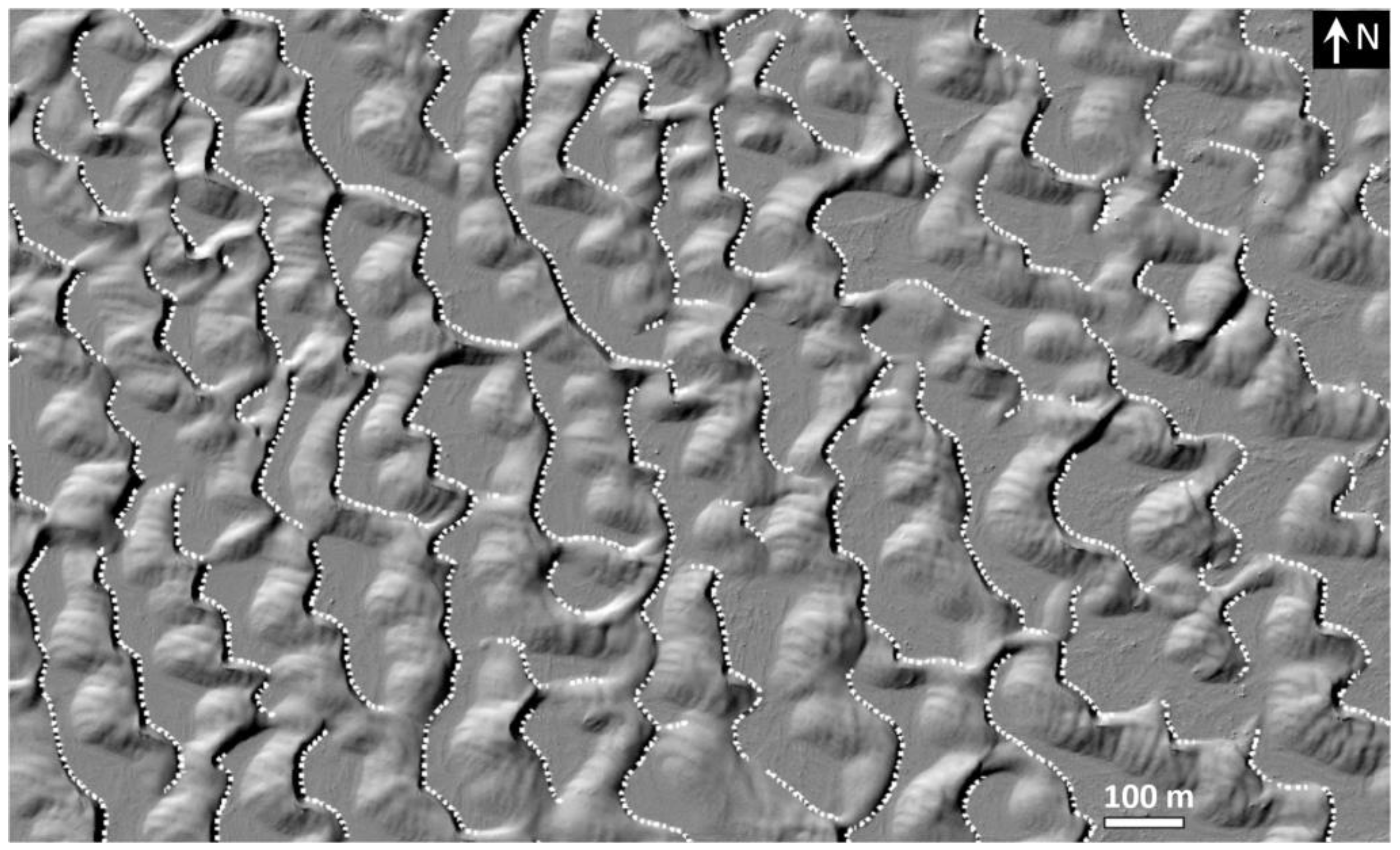
2.1. Study Area
2.2. Data
3. Methods
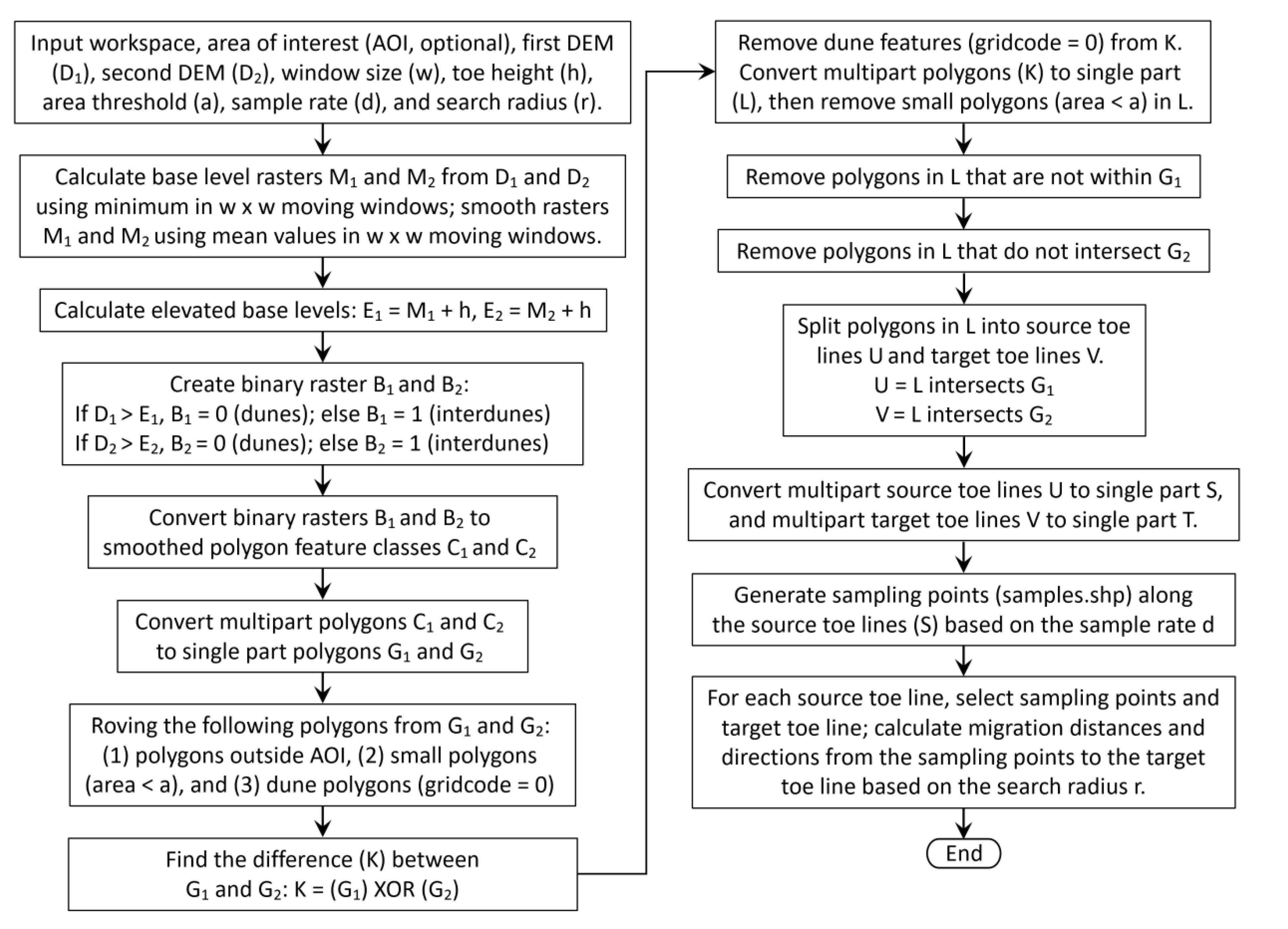
3.1. Methodology Flowchart
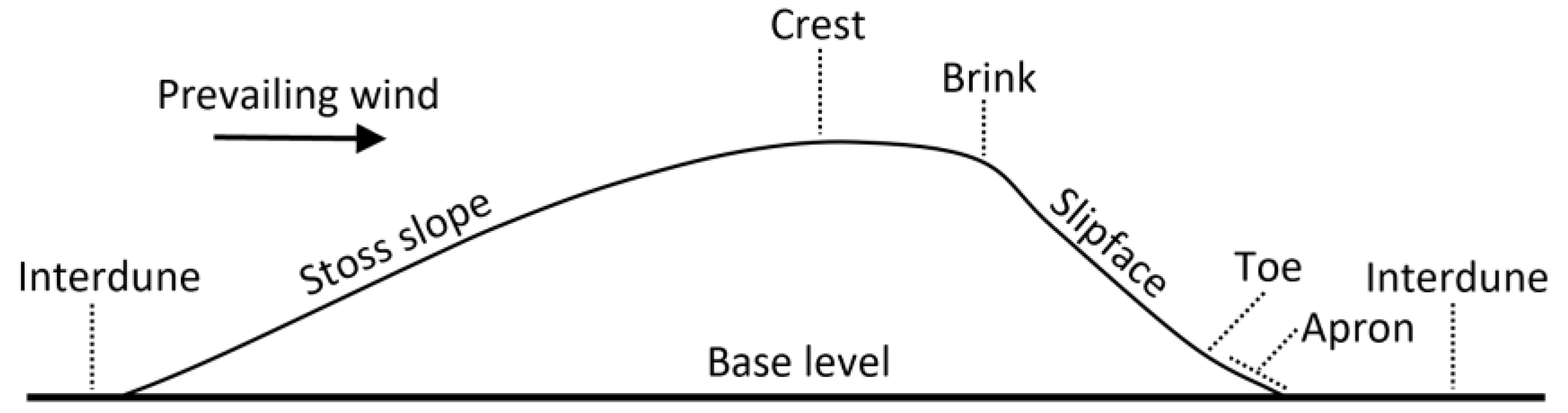
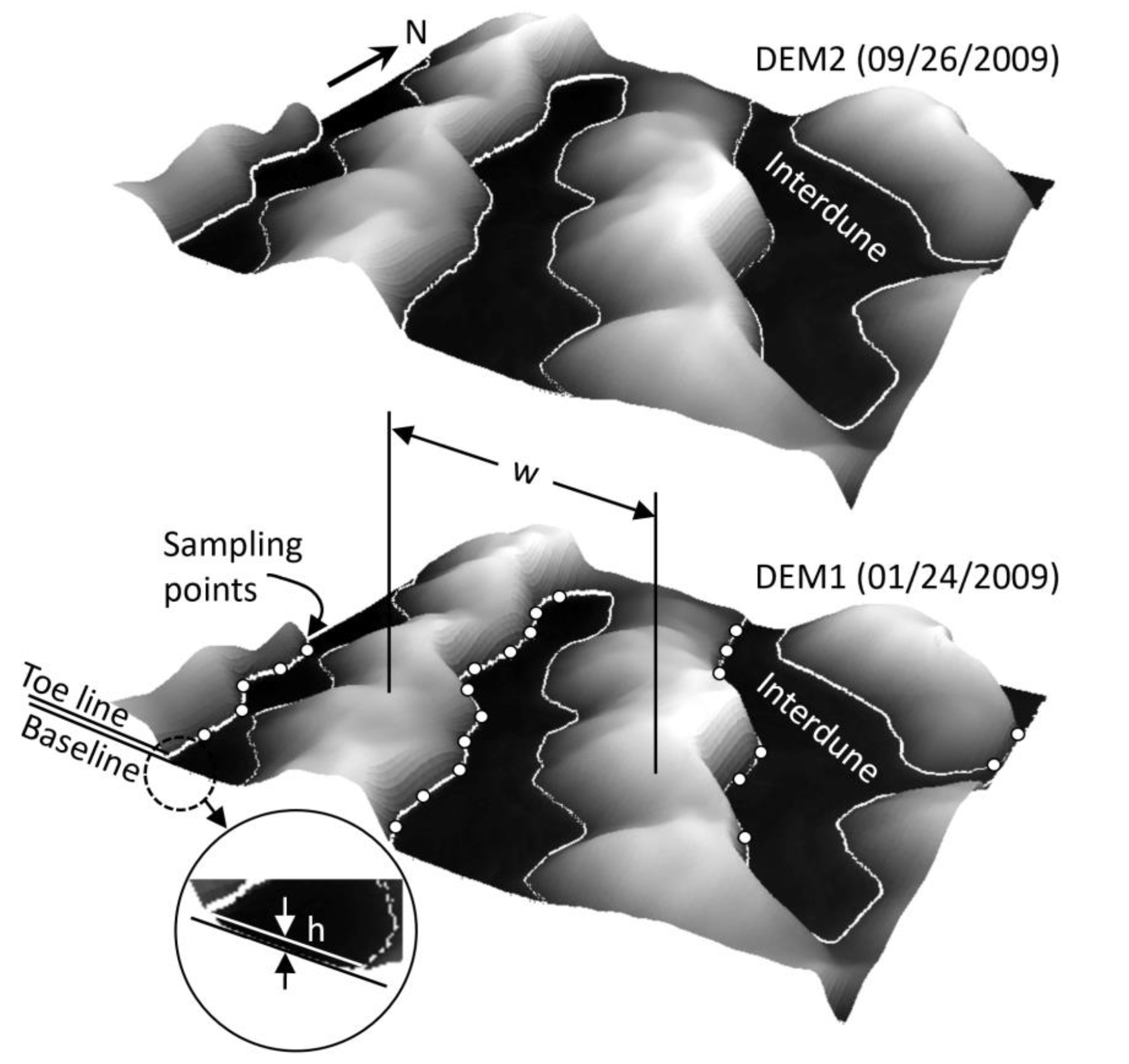
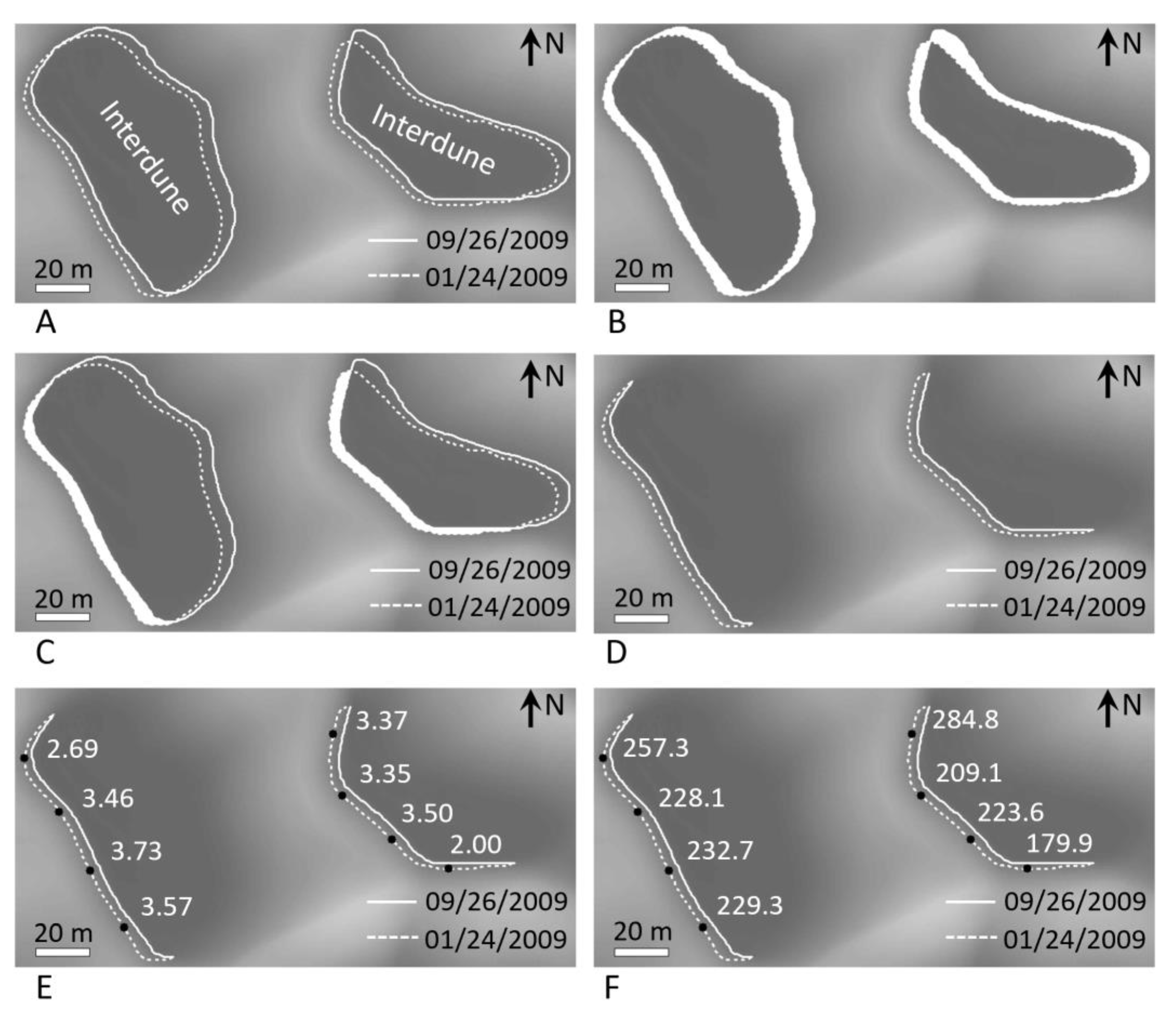
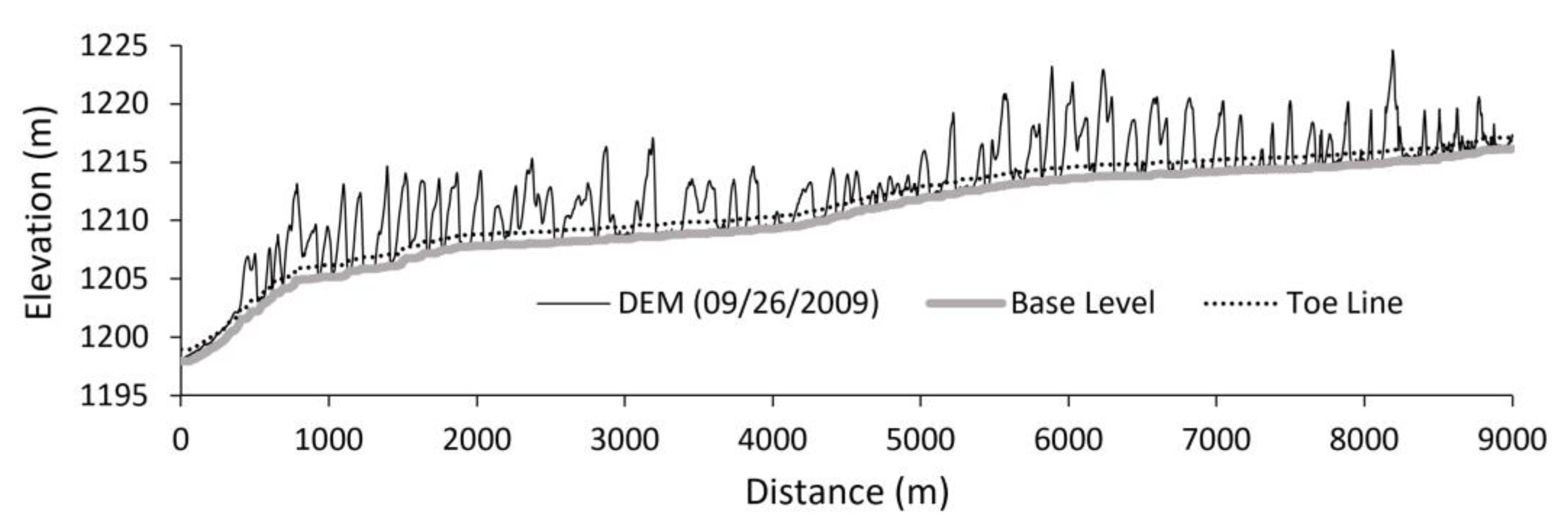
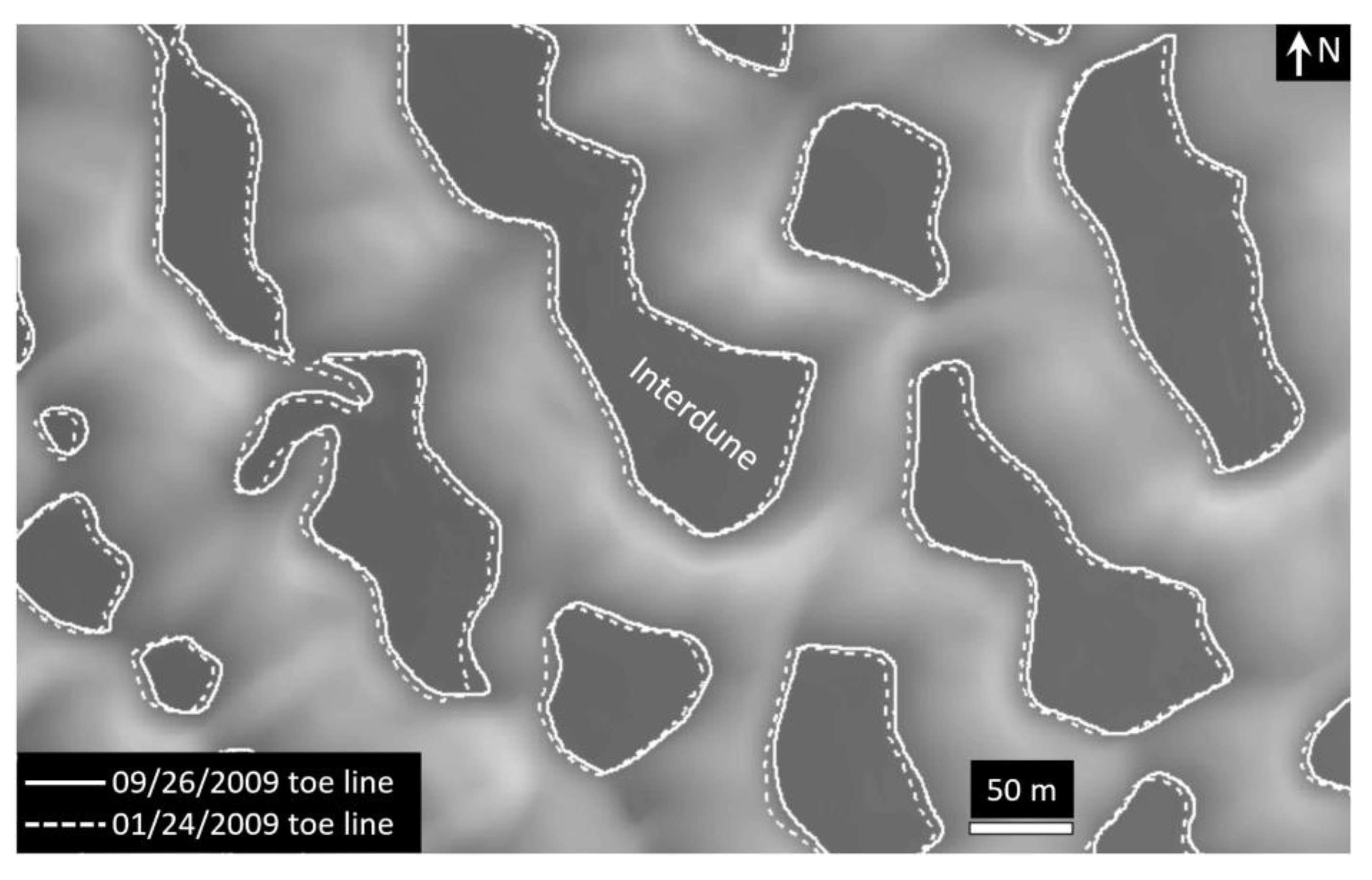
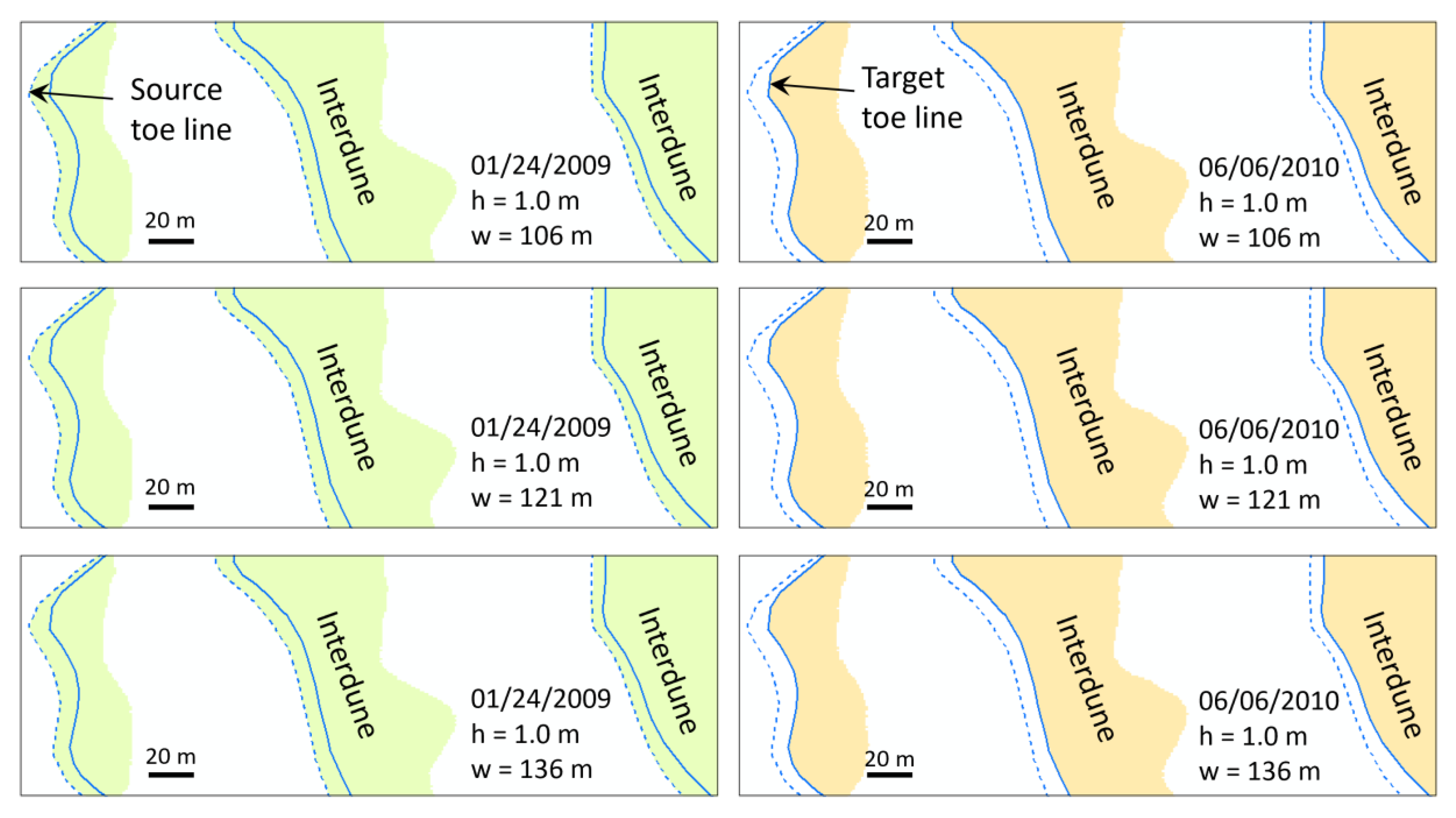
3.2. Extraction of Base Level and Toe Lines
3.3. Calculation of Migration Distance and Direction
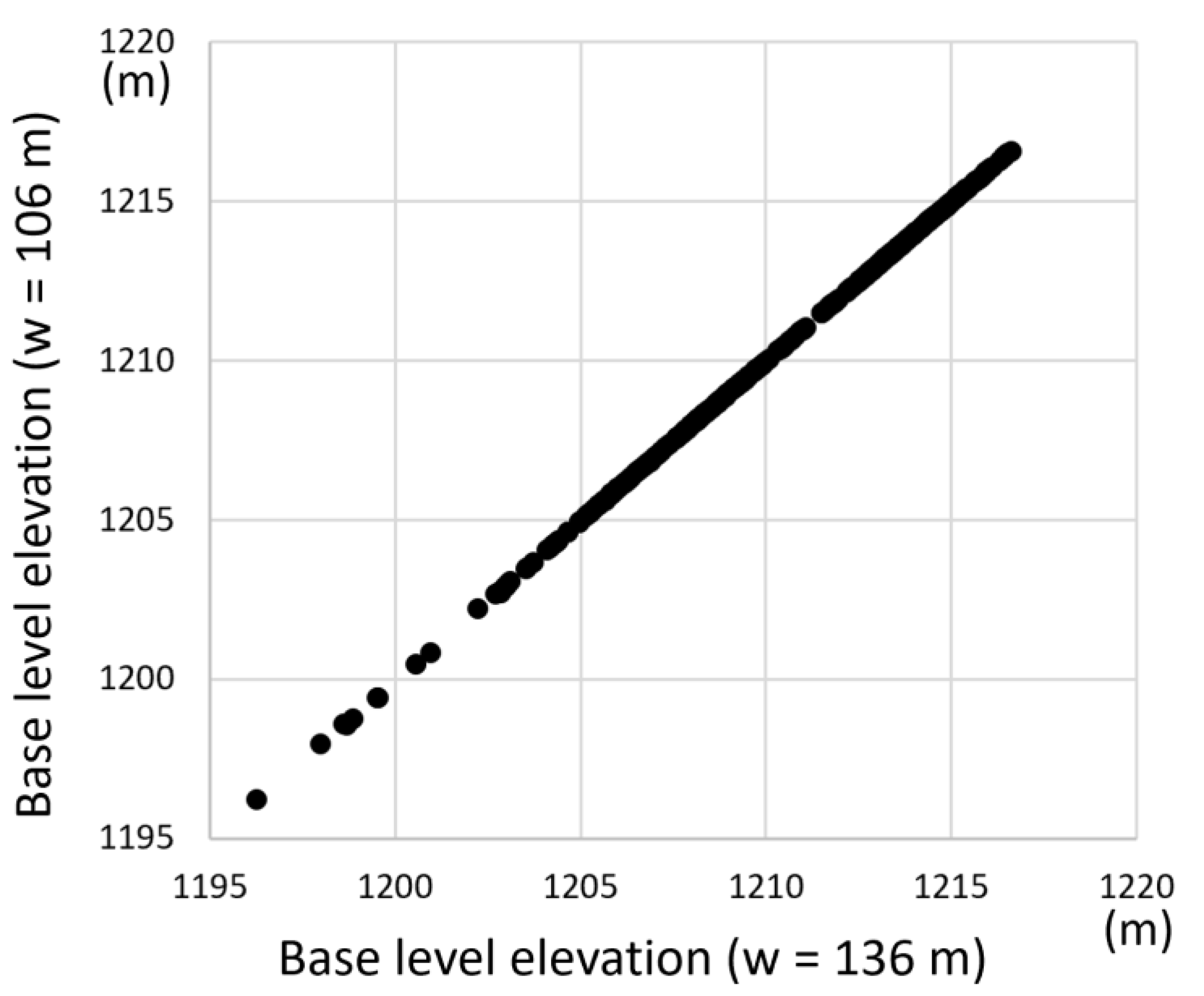
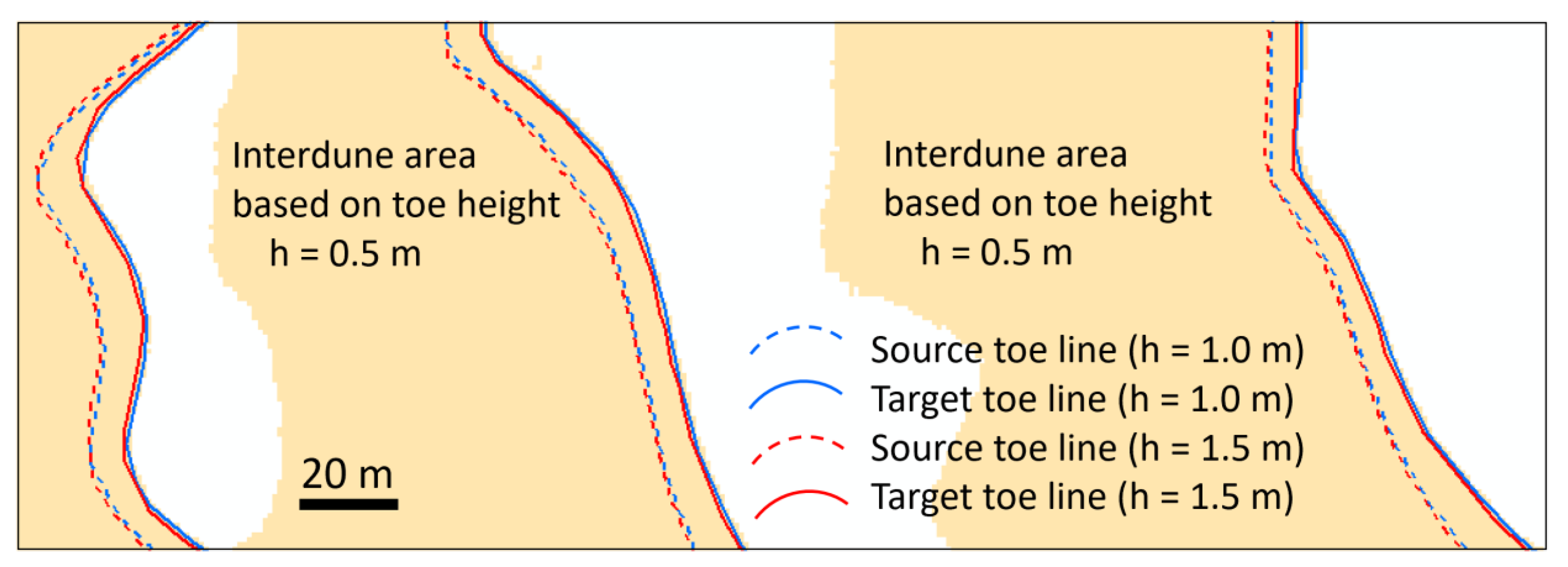
3.4. Sensitivity Analysis
4. Results
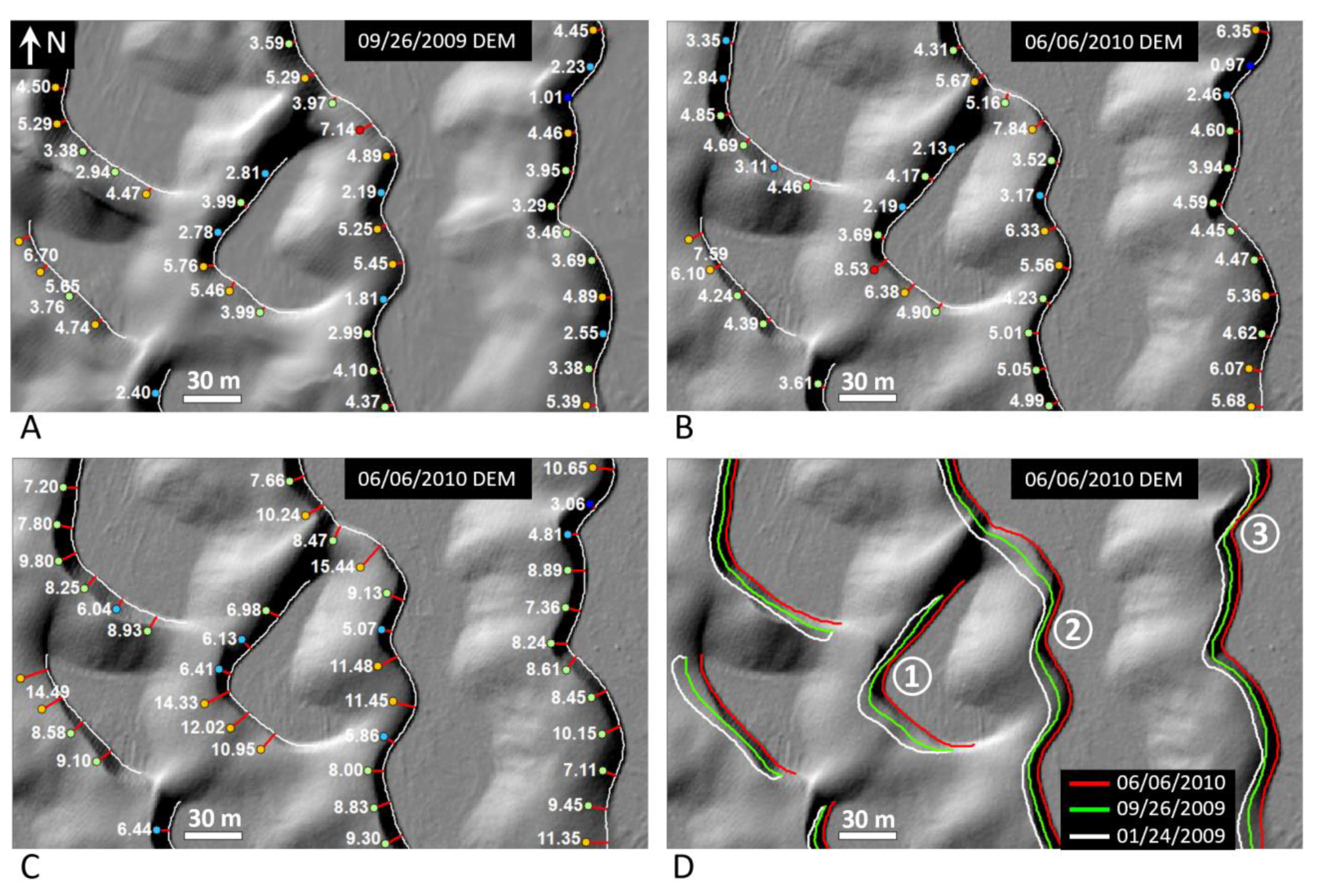
4.1. Base Level and Toe Lines
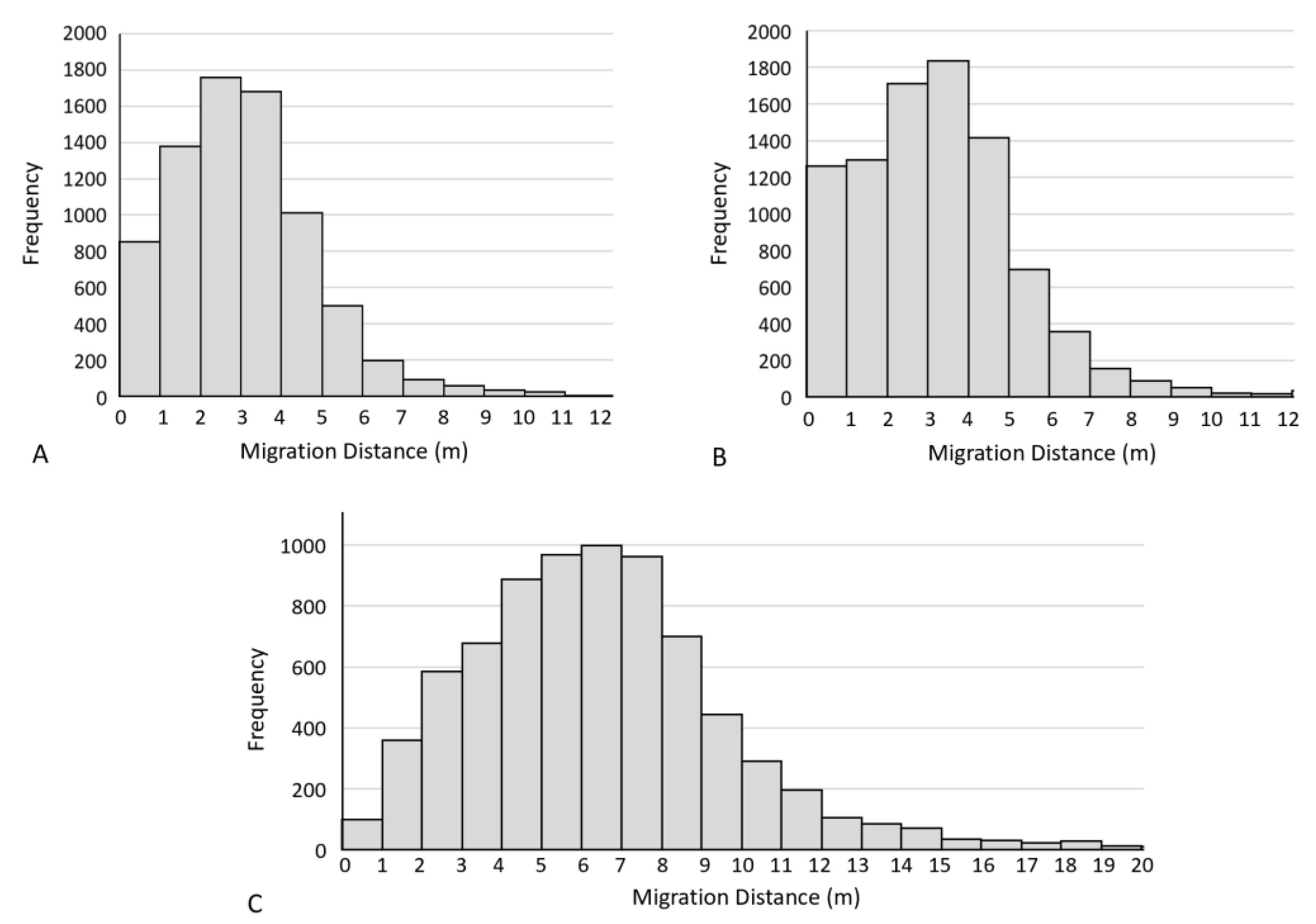
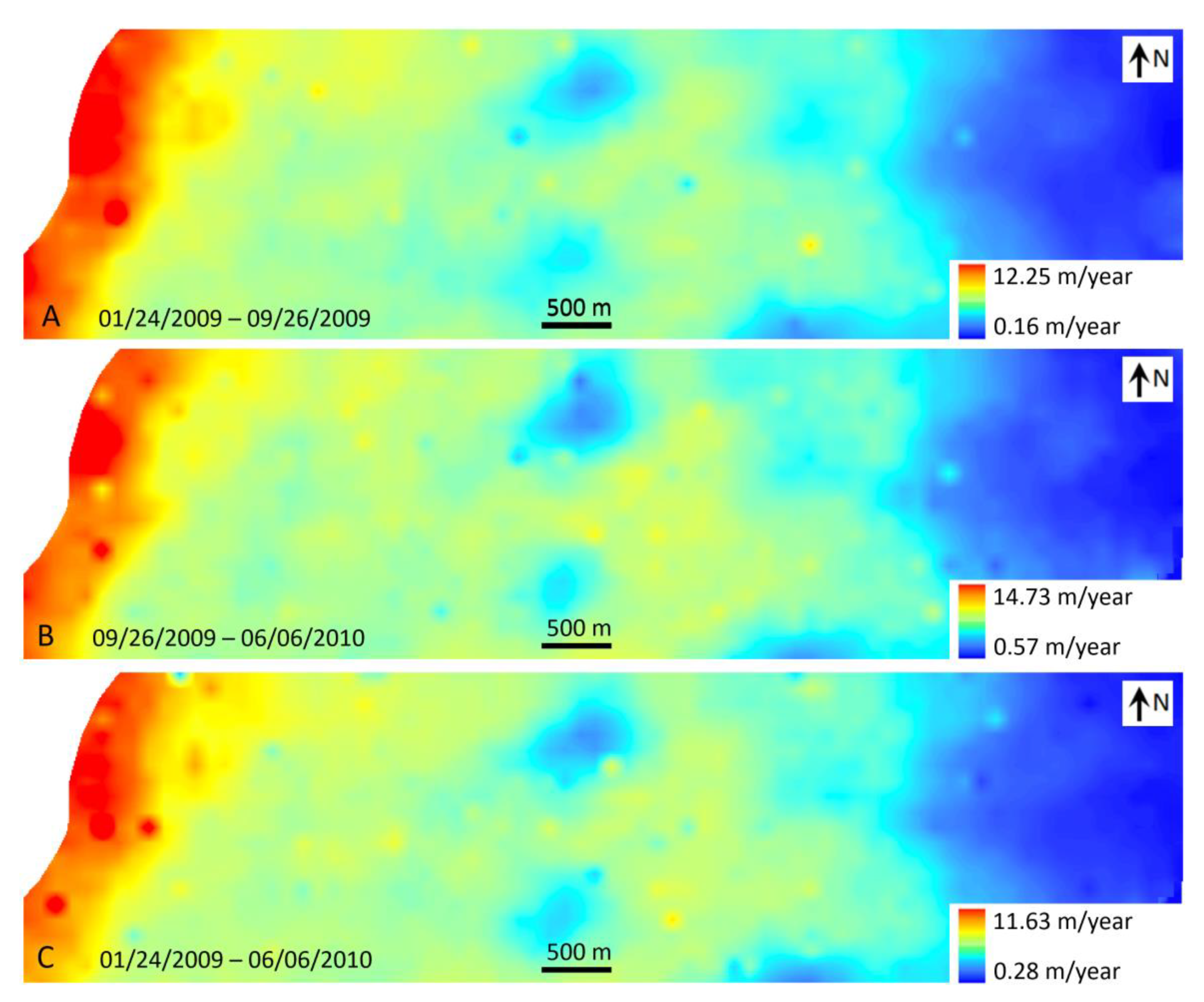
4.2. Migration Distance/Rate
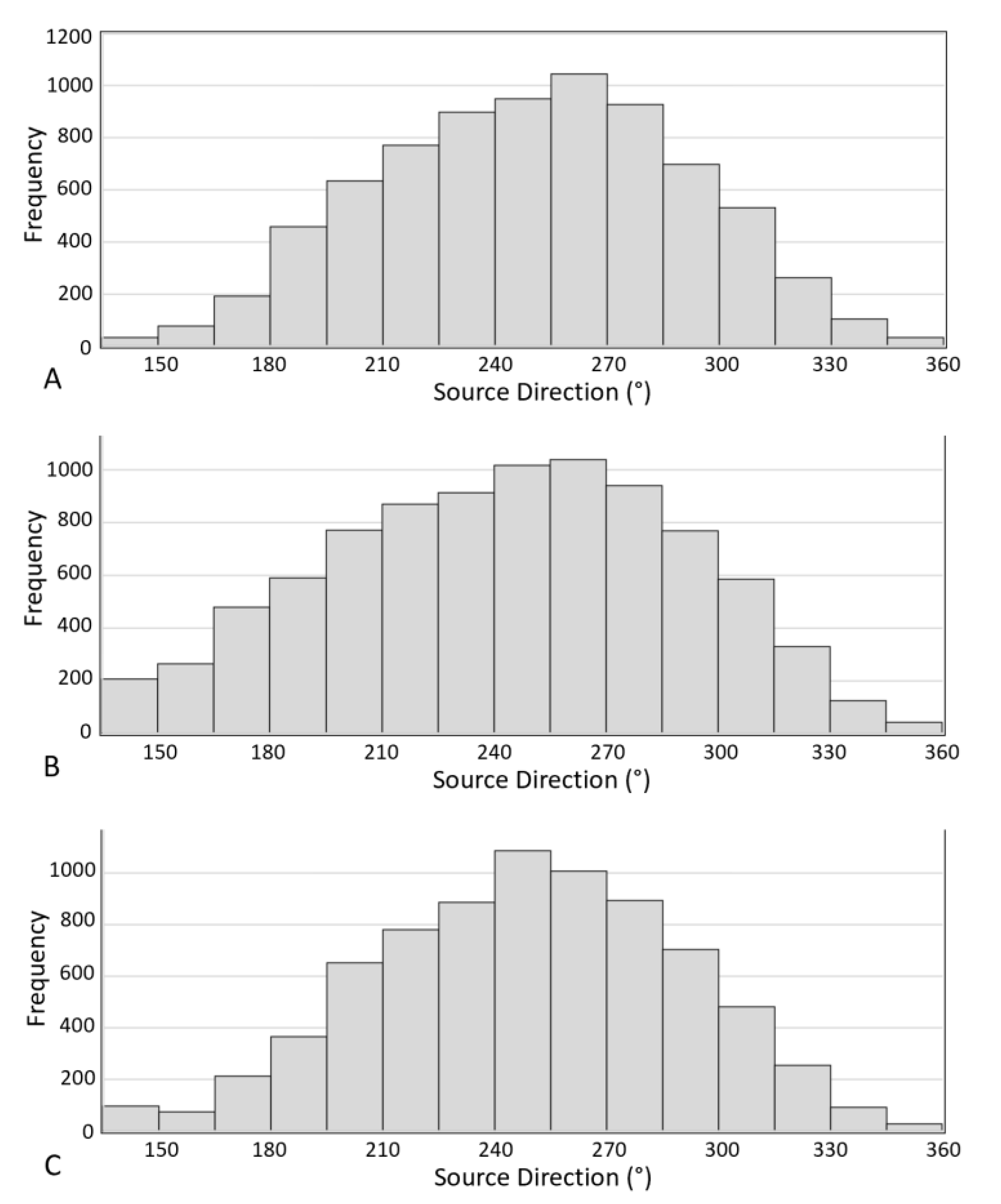
4.3. Migration Direction
5. Discussion
5.1. Sensitivity Analysis
5.2. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bagnold, R.A. The Physics of Blown Sand and Desert Dunes; Chapman and Hall: London, UK, 1941; p. 265. [Google Scholar]
- Wasson, R.; Hyde, R. Factors determining desert dune type. Nature 1983, 304, 337–339. [Google Scholar] [CrossRef]
- Lancaster, N. Geomorphology of Desert Dunes; Routledge: London, UK, 1995; p. 312. [Google Scholar]
- Fenton, L.K. Dune migration and slip face advancement in the Rabe Crater dune field, Mars. Geophys. Res. Lett. 2006, 33, L20201. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Wolfe, S.A.; Moorman, B.J. Sand-water flows on cold-climate eolian dunes: Environmental analogs for the eolian rock record and Martian sand dunes. J. Sediment. Res. 2007, 77, 1–8. [Google Scholar] [CrossRef]
- Rubin, D.; Hesp, P.A. Multiple origins of linear dunes on Earth and Titan. Nat. Geosci. 2009, 2, 653–658. [Google Scholar] [CrossRef]
- Bourke, M.C.; Lancaster, N.; Fenton, L.K.; Parteli, E.J.R.; Zimbelman, J.R.; Radebaugh, J. Extraterrestrial dunes: An introduction to the special issue on planetary dune systems. Geomorphology 2010, 121, 1–14. [Google Scholar] [CrossRef]
- Bridges, N.T.; Ayoub, F.; Avouac, J.-P.; Leprince, S.; Lucas, A.; Mattson, S. Earth-like sand fluxes on Mars. Nature 2012, 485, 339–342. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Livingstone, I.; Wiggs, G.F.S.; Weaver, C.M. Geomorphology of desert sand dunes: A review of recent progress. Earth Sci. Rev. 2007, 80, 239–257. [Google Scholar] [CrossRef]
- Rubin, D.M. Lateral migration of linear dunes in the Strzelecki Desert, Australia. Earth Surf. Process. Landf. 1990, 15, 11–14. [Google Scholar] [CrossRef]
- Ha, S.; Dong, G.; Wang, G. Morphodynamic study of reticulate dunes at southeastern fringe of the Tengger Desert. Sci. China 1999, 42, 207–215. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, X.; Chen, G. Monitoring sand dune advance in the Taklimakan Desert. Geomorphology 2000, 35, 219–231. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, T.; Wang, X. Geomorphology of the megadunes in the Badain Jaran Desert. Geomorphology 2004, 60, 191–203. [Google Scholar] [CrossRef]
- Elbelrhiti, H.; Claudin, P.; Andreotti, B. Field evidence for surface-wave-induced instability of sand dunes. Nature 2005, 437, 720–723. [Google Scholar] [CrossRef]
- Ewing, R.C.; Kocurek, G. Aeolian dune-field pattern boundary conditions. Geomorphology 2010, 114, 175–187. [Google Scholar] [CrossRef]
- Narteau, C.; Zhang, D.; Rozier, O.; Claudin, P. Setting the length and timescales of a cellular automaton dune model from the analysis of superimposed bed forms. J. Geophys. Res. 2009, 114, F03006. [Google Scholar]
- Zhang, D.; Narteau, C.; Rozier, O. Morphodynamics of barchan and transverse dunes using a cellular automaton model. J. Geophys. Res. 2010, 115, F03041. [Google Scholar] [CrossRef]
- Barrio-Parra, F.; Rodríguez-Santalla, I. A free cellular model of dune dynamics: Application to El Fangar spit dune system (Ebro Delta, Spain). Comput. Geosci. 2014, 62, 187–197. [Google Scholar] [CrossRef]
- Alhajraf, S. Computational fluid dynamic modeling of drifting particles at porous fences. Environ. Model. Softw. 2004, 19, 163–170. [Google Scholar] [CrossRef]
- Hersen, P. On the crescentic shape of barchans dunes. Eur. Phys. J. B 2004, 37, 507–514. [Google Scholar] [CrossRef] [Green Version]
- Araújo, A.D.; Parteli, E.J.R.; Pöschel, T.; Andrade, J.S.; Herrmann, H.J. Numerical modeling of the wind flow over a transverse dune. Sci. Rep. 2013, 3, 2858. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gay, S.P. Observations regarding the movement of barchan sand dunes in the Nazca to Tanaca area of southern Peru. Geomorphology 1999, 27, 279–293. [Google Scholar]
- Jimenez, J.A.; Maia, L.P.; Serra, J.; Morias, J. Aeolian dune migration along the Ceara coast, north-eastern Brazil. Sedimentology 1999, 46, 689–701. [Google Scholar] [CrossRef]
- Bailey, S.D.; Bristow, C.S. Migration of parabolic dunes at Abberffraw, Anglesey, north Wales. Geomorphology 2004, 59, 165–174. [Google Scholar] [CrossRef]
- Levin, N.; Ben-Dor, E.; Karnieli, A. Topographic information of sand dunes as extracted from shading effects using Landsat images. Remote. Sens. Environ. 2004, 90, 190–209. [Google Scholar] [CrossRef]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J. Automatic and precise orthorectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef] [Green Version]
- Yao, Z.Y.; Wang, T.; Han, Z.W.; Zhang, W.M.; Zhao, A.G. Migration of sand dunes on the northern Alxa Plateau, Inner Mongolia, China. J. Arid Environ. 2007, 70, 80–93. [Google Scholar] [CrossRef]
- Vermeesch, P.; Drake, N. Remotely sensed dune celerity and sand flux measurements of the world’s fastest barchans (Bodélé, Chad). Geophys. Res. Lett. 2008, 35, L24404. [Google Scholar] [CrossRef] [Green Version]
- Necsoiu, M.; Leprince, S.; Hooper, D.M.; Dinwiddie, C.L.; McGinnis, R.N.; Walter, G.R. Monitoring migration rates of an active subarctic dune field using optical imagery. Remote Sens. Environ. 2009, 113, 2441–2447. [Google Scholar] [CrossRef]
- Mohamed, I.N.L.; Verstraeten, G. Analyzing dune dynamics at the dune-field scale based on multi-temporal analysis of Landsat-TM images. Remote Sens. Environ. 2012, 119, 105–117. [Google Scholar] [CrossRef]
- Mitasova, H.; Hardin, E.; Starek, M.J.; Harmon, R.S.; Overton, M.F. Landscape dynamics from LiDAR data time series. In Geomorphometry; Hengl, T., Evans, I.S., Wilson, J.P., Gould, M., Eds.; Geomorphometry.org: Redlands, CA, USA, 2011; pp. 3–6. [Google Scholar]
- Solazzo, D.; Sankey, J.B.; Sankey, T.T.; Munson, S.M. Mapping and measuring aeolian sand dunes with photogrammetry and LiDAR from unmanned aerial vehicles (UAV) and multispectral satellite imagery on the Paria Plateau, AZ, USA. Geomorphology 2018, 319, 174–185. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Garcia, G.P.B.; Affonoso, A.A.; Albuquerque, R.W. Dune migration and volume change from airborne LiDAR, terrestrial LiDAR and Structure from Motion-Multi View Stereo. Comput. Geosci. 2020, 143, 1–13. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, L.; Liao, M.; Feng, G.; Dong, J.; Ao, M.; Yu, Y. Quantifying the spatio-temporal patterns of dune migration near Minqin Oasis in northwestern China with time series of Landsat-8 and Sentinel-2 observations. Remote Sens. Environ. 2020, 236, 1–24. [Google Scholar] [CrossRef]
- Ali, E.; Xu, W.; Ding, X. Improved optical image matching time series inversion approach for monitoring dune migration in North Sinai Sand Sea: Algorithm procedure, application, and validation. ISPRS J. Photogramm. Remote Sens. 2020, 164, 106–124. [Google Scholar] [CrossRef]
- Goudie, A. Geomorphological Techniques, 2nd ed.; Routledge: London, UK, 1994; p. 570. [Google Scholar]
- Woolard, J.W.; Colby, J.D. Spatial characterization, resolution, and volumetric change of coastal dunes using airborne LIDAR: Cape Hatteras, North Carolina. Geomorphology 2002, 48, 269–287. [Google Scholar] [CrossRef] [Green Version]
- Hardin, E.; Mitasova, H.; Tateosian, L.G.; Overton, M. GIS-Based Analysis of Coastal Lidar Time-Series, Springer Briefs in Computer Science. Available online: https://0-link-springer-com.brum.beds.ac.uk/book/10.1007/978-1-4939-1835-5 (accessed on 28 June 2021).
- Saye, S.E.; van der Wal, D.; Pye, K.; Blott, S.J. Beach–dune morphological relationships and erosion/accretion: An investigation at five sites in England and Wales using LIDAR data. Geomorphology 2005, 72, 128–155. [Google Scholar] [CrossRef]
- Reitz, M.D.; Jerolmack, D.J.; Ewing, R.C.; Martin, R.L. Barchan-parabolic dune pattern transition from vegetation stability threshold. Geophys. Res. Lett. 2010, 37, L19402. [Google Scholar] [CrossRef] [Green Version]
- Ewing, R.C.; Kocurek, G.A. Aeolian dune interactions and dune-field pattern formation: White Sands Dune Field, New Mexico. Sedimentology 2010, 57, 1199–1219. [Google Scholar] [CrossRef]
- Baitis, E.; Kocurek, G.; Smith, V.; Mohrig, D.; Ewing, R.C.; Peyret, A.-P.B. Definition and origin of the dune-field pattern at White Sands, New Mexico. Aeolian Res. 2014, 15, 269–287. [Google Scholar] [CrossRef]
- Ewing, R.C.; McDonald, G.D.; Hayes, A.G. Multi-spatial analysis of aeolian dune-field patterns. Geomorphology 2015, 240, 44–53. [Google Scholar] [CrossRef]
- Dong, P. Automated measurement of sand dune migration using multi-temporal LiDAR data and GIS. Int. J. Remote Sens. 2015, 36, 5526–5547. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Levin, N.; Barchyn, T.E.; Baddock, M. Remote sensing and spatial analysis of aeolian sand dunes: A review and outlook. Earth Sci. Rev. 2012, 111, 319–334. [Google Scholar] [CrossRef]
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne lidar change detection: An overview of Earth sciences applications. Earth Sci. Rev. 2019, 198, 1–25. [Google Scholar] [CrossRef]
- Xia, J.; Dong, P. A GIS add-in for automated measurement of sand dune migration using LiDAR-derived multi-temporal and high-resolution digital elevation models. Geosphere 2016, 12, 1316–1322. [Google Scholar] [CrossRef]
- Kocurek, G.; Carr, M.; Ewing, R.; Havholm, K.G.; Nagar, Y.C.; Singhvi, A.K. White Sands Dune Field, New Mexico: Age, dune dynamics and recent accumulations. Sediment. Geol. 2007, 197, 313–331. [Google Scholar] [CrossRef]
- McKee, E. Structures of dunes at White Sands National Monument, New Mexico (and a comparison with structures of dunes from other selected areas). Sedimentology 1966, 7, 1–69. [Google Scholar] [CrossRef]
- Langford, R.P. The Holocene history of the White Sands dune field and influences on eolian deflation and playa lakes. Quat. Int. 2003, 104, 31–39. [Google Scholar] [CrossRef]
- Ewing, R.C.; Kocurek, G.; Lake, L.W. Pattern analysis of dune-field parameters. Earth Surf. Process. Landf. 2006, 31, 1176–1191. [Google Scholar] [CrossRef]
- Tsoar, H.; Blumberg, D.G.; Stoler, Y. Elongation and migration of sand dunes. Geomorphology 2004, 57, 293–302. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Distance (m) | Standard Deviation (m) | No. of Distances within 1.0 m | No. of Distances within 2.0 m | |
|---|---|---|---|---|
| DIST1 | 1.11 | 0.5885 | 1612/2670 (60.4%) | 2379/2670 (89.1%) |
| DIST2 | 1.10 | 0.5909 | 1439/2297 (62.6%) | 2048/2297 (89.2%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, P.; Xia, J.; Zhong, R.; Zhao, Z.; Tan, S. A New Method for Automated Measurement of Sand Dune Migration Based on Multi-Temporal LiDAR-Derived Digital Elevation Models. Remote Sens. 2021, 13, 3084. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163084
Dong P, Xia J, Zhong R, Zhao Z, Tan S. A New Method for Automated Measurement of Sand Dune Migration Based on Multi-Temporal LiDAR-Derived Digital Elevation Models. Remote Sensing. 2021; 13(16):3084. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163084
Chicago/Turabian StyleDong, Pinliang, Jisheng Xia, Ruofei Zhong, Zhifang Zhao, and Shucheng Tan. 2021. "A New Method for Automated Measurement of Sand Dune Migration Based on Multi-Temporal LiDAR-Derived Digital Elevation Models" Remote Sensing 13, no. 16: 3084. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163084