4.1. Comparison of Different Stochastic Models
Numeric values for variances of the instrumental errors were obtained from two sources. Firstly, the TLS manufacturer specifications gave information about the scanner’s performance in different ways. These could be noise, repeatability, RMS or precision at a certain range. Secondly, a calibration certificate from the manufacturer could contain information about special CPs. However, numeric values were not available in most cases. Therefore, the user had to determine them by means of a calibration procedure in special calibration fields. Despite the recommendation of an in situ calibration [
34], very few measurement scenarios permit such a procedure. As mentioned in
Section 3.1, the HDS 7000 was not calibrated before the measurement; therefore, the actual values of the CPs and their variances at that time remain unknown. Nevertheless, numeric values for the CPs as well as their variances were available from a later calibration (cf. [
30]) of the same scanner conducted in a calibration hall in Bonn. These values were used as starting values for the CPs in the SVCM.
Table 2 shows the values of the standard deviations (implicitly the variances) used for the functional correlating errors:
In order to obtain appropriate values for the non-correlating errors,
,
and the range noise
were varied for all of the four TLS station points, starting from the TLS manufacturer’s specifications [
35] as initial parameters. These specifications assumed
as well as
between 0.4 and 3.8 mm for 37% reflectance (gray) and values depending on range. In contrast to how range noise was defined by the manufacturers, the value of
as a non-correlating elementary error was adopted as a constant value depicting the internal noise of the range measurement unit and, therefore, was constant for all ranges. These assumptions were too pessimistic for all four TLS station points in terms of the evaluation criterion 1. Thus, the adaption of the aforementioned parameters was needed and was conducted as seen in
Table 3 with lower values for the angles and a value at the lower boundary for the distance. The values given in
Table 2 remained unchanged for the newly defined six SVCMs. In each version, only the non-correlating errors were modified; therefore, only the main diagonal of the SVCM changed
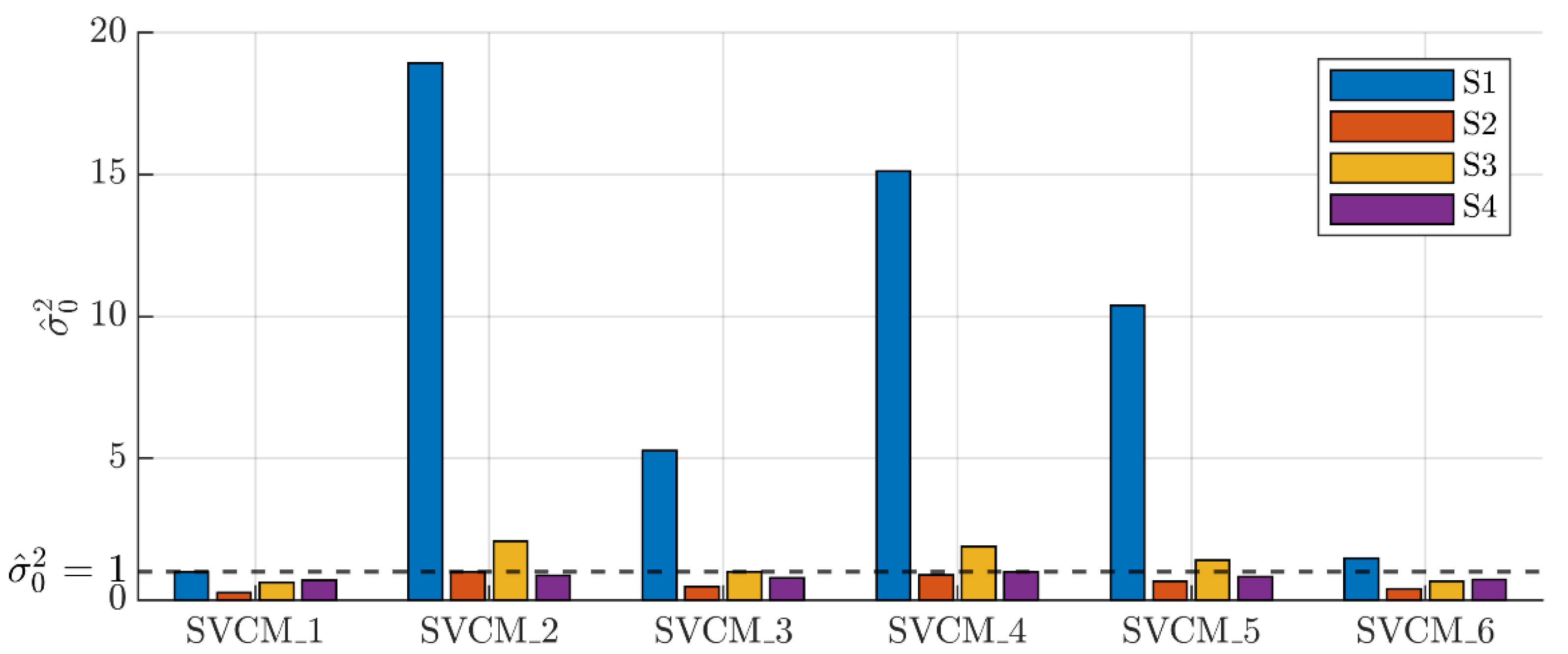
.It should be noted that these six SVCMs represent a selection and were justified below. The standard deviations of the non-correlating errors were gradually adjusted so that the first evaluation criterion could be accepted.
Figure 6 shows that for each of the four TLS station points (S1-S4) it was necessary to modify the standard deviations of the non-correlating errors in order to prevent rejecting the null hypothesis of the global adjustment test. The first four SVCMs were chosen so that they led to an exact match of the two variance factors at one TLS station point. The values of
for S1 at SVCM_2-5 were strikingly high and could be explained by the increasing influence of the variances and covariances in the SVCM at shorter distances. According to Equations (9) and (10), some variances of functional-correlating errors had the squared distance as the denominator. Thus, adopting the constant variances of the elementary errors, the values in the SVCM were larger at short distances compared with longer ones. Hence, for TLS station point S1, the relative contribution of functional correlating errors and non-correlating errors had to be adapted so that the evaluation criterion one was fulfilled. The standard deviations of the non-correlating errors were set in SVCM_5 so that
approached one as close as possible simultaneously for the three TLS station points S2-S4. This joint consideration of
was extended to all four stations when fixing SVCM_6 and was the attempt to specify a consensus dataset which gave an acceptable result for all four TLS station points in terms of the evaluation criterion 1. Finally, it must be mentioned that different constellations of the non-correlating errors were possible and similar results as shown in
Figure 6 were obtained. Since the parameters always had to be adjusted step by step, this required a lot of computing effort and time. Therefore, this work was limited to the six SVCMs specified.
Table 4 serves to compare the three different stochastic models (I, D, SVCM) on the basis of the comparison criterion 1. Obviously, the identity matrix used as cofactor matrix was a too pessimistic assumption for the stochastic model. In general, it could be seen that the a posteriori variance factors
obtained for the identity matrix as well as for the diagonal matrix were always smaller than the a posteriori variance factor of the corresponding SVCM. Since only the main diagonal was populated in the stochastic models of the identity matrix and the diagonal matrix, it could be assumed that the increase in
was due to the covariances.
In three out of four cases, where the ideal SVCM was found for each station point, the difference between a fully populated matrix and a diagonal matrix was small (less than 0.2), which showed that the diagonal matrix could be accepted as a pessimistic assumption for the stochastic model. However, the most dominant difference occurred at SVCM_2 for S2 where it can be concluded that considering the covariances significantly improved the stochastic model.
For approach (a) the standard deviations of the three coordinates of a control point were identical, which was due to the used functional model (refer to
Section 2.1). Beyond investigating the impact of the three types of stochastic models, the influence on the estimated parameter’s precision due to a station-wise adapted stochastic model (SVCM_1 to SVCM_4, respectively) and an overarching adapted stochastic model (SVCM_6) was analyzed.
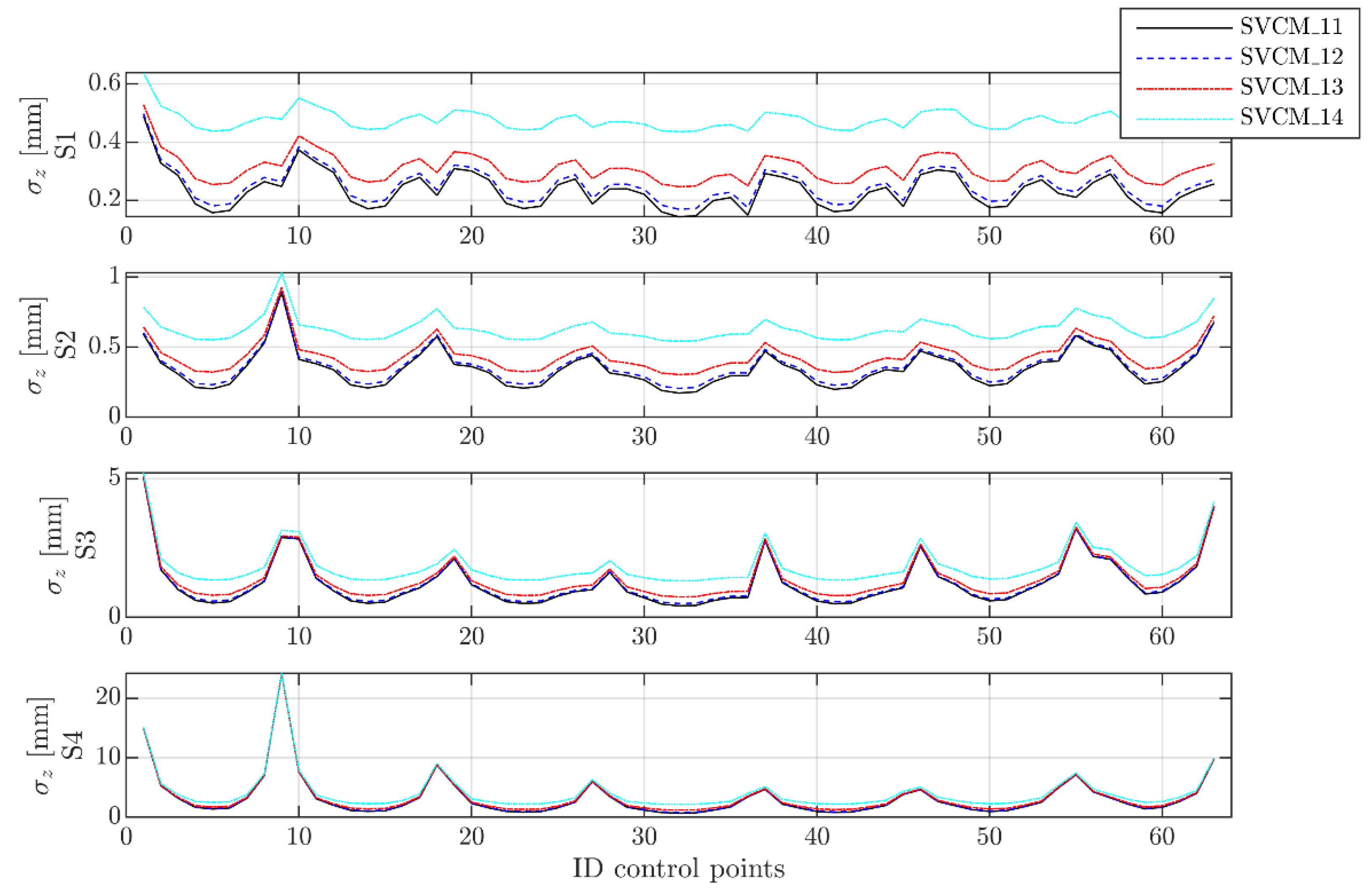
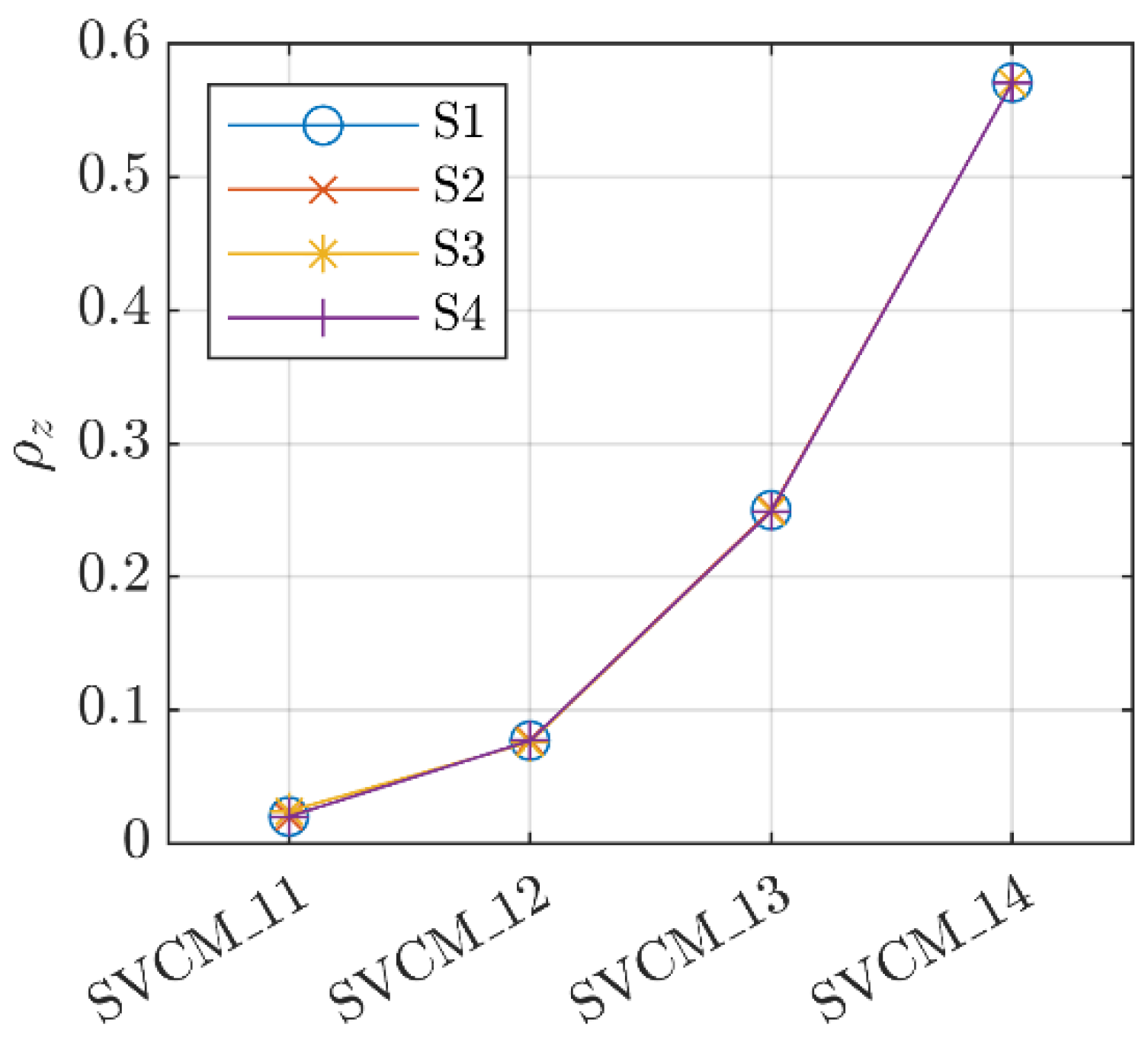
The stochastic influence of SVCM_3 and SVCM_6 for S3 are shown representatively for all TLS station points based on the a posteriori standard deviations (see
Section 3.2) in
Figure 7a,b. For all TLS station points, the behavior of the a posteriori precision was similar.
The comparison of the precision measures obtained for the station-wise adapted and overarching-wise adapted stochastic models showed that for each station the precision of the estimated parameters decayed for the latter one. This effect occurred independently from
lying over or below one and emphasized the added value of applying a comprehensive stochastic model. This conclusion complied with the conclusions drawn from the simulation study in
Section 2.3.
Noticeable in
Figure 7 are the peaks that occurred, which are also seen in the following Figures with regard to precision measures. The main reason for their occurrence was the control points’ geometric configuration. The peaks correspond to control points being located at the surface’s corners. Thus, their appearance was a configuration issue, reflecting that parameter estimation results at the borders were less precise than the ones in the middle.
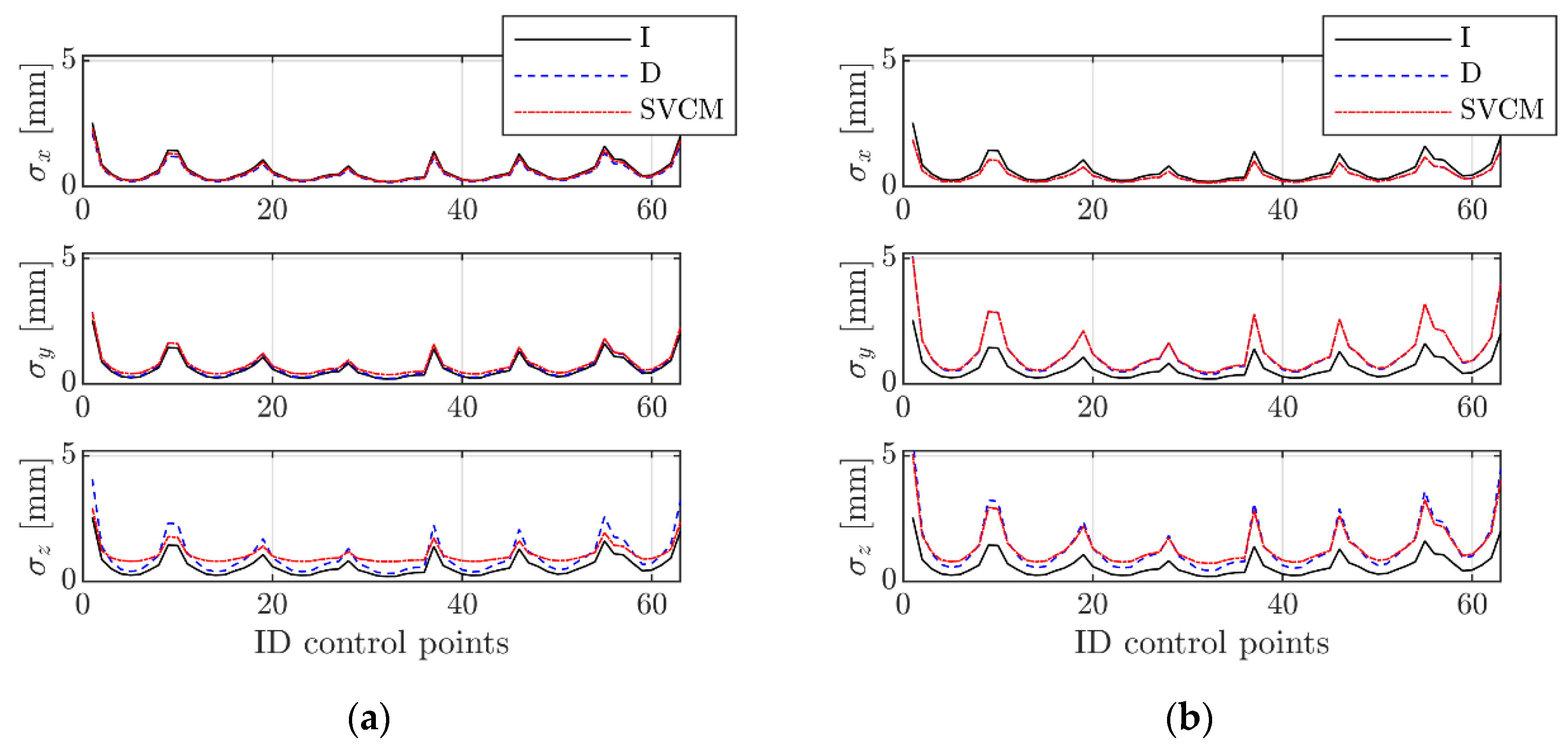
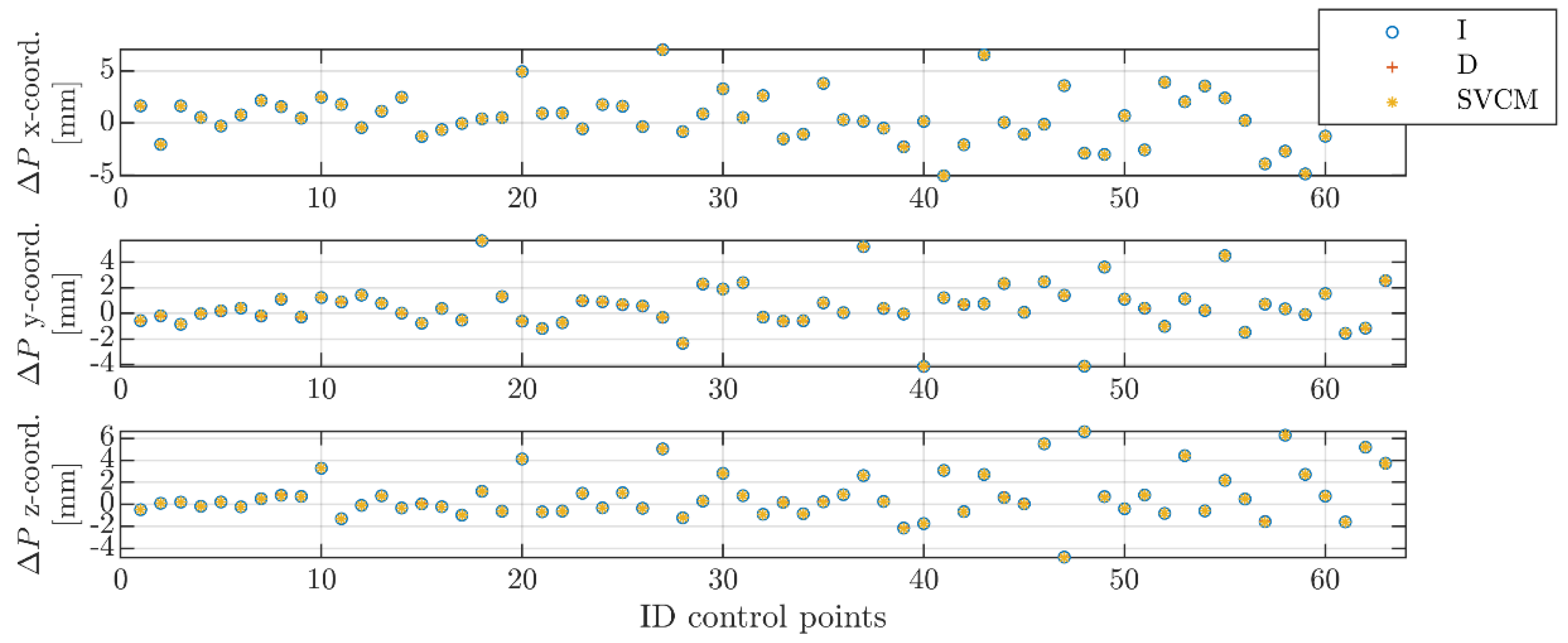
The evaluation according to the third evaluation criterion implied analyzing the differences of the nominal control points and estimated ones.
Figure 8 shows an example of differences between the nominal and estimated control points obtained for the three stochastic models (I, D, SVCM) in case of S1 and using SVCM_1. For all three coordinate directions, the differences between estimated control points of the three stochastic models (I, D, SVCM) (see
Figure 8) behaved approximately the same and lied in the range of a few tenths of millimeters. With regard to the nominal control points, differences were in the range of a few millimeters. This behavior could also be shown for all other TLS station points and was not presented further in this paper. It could be concluded from
Figure 8 that the choice of a particular stochastic model among the three ones had no significant functional influence on the estimated control points.
In this section, the investigation was on the influence of the variance of the non-correlating elementary errors on the functional as well as on the stochastic components of the B-spline approximation results (influence of the first summands in Equation (4)). It turned out that in the varied range, these variances had practically no impact on the estimated control points. On the other hand, their estimated precision was certainly influenced by the chosen variance level of the non-correlating errors. Selecting an adequate variance level for these errors was mandatory to increase the estimation precision. This followed from the comparison of results obtained with station-wise and overarching-wise adapted stochastic models.
4.2. Investigation of Individual Errors and Their Impact
Changing the variance level of an elementary error led to different values of the points’ errors of position and as well as to different values of the covariances. The aim of this section was to investigate how the values chosen for each individual parameter influenced the SVCM and, finally, the estimation results. Additionally, a better understanding of the TLS model presented in
Section 2.2 and its influences was pursued.
In the upcoming section, the individual impact of several errors’ variances on the estimated surface were analyze. Three functional correlating errors were selected based on their influence on the SVCM. Each one led to different effects on the estimated surface along the three coordinate axes defined as explained in
Section 3.1. An increase in the variance of the chosen CPs led to a decrease in the surface quality only in the specific direction. To be more specific, the precision of estimated control points would be lower in some directions if some of these errors dominated. Not only did these errors have an impact on the main diagonal of the SVCM, but also on the covariances. This was why they were interesting in contrast to non-correlating errors that only filled up the main diagonal. Results were evaluated using the same three criteria from
Section 3.2. Additionally, spatial correlations were extracted out of the SVCM and analyzed for each of the functional correlating errors.
The chosen CPs were the zero point error
and its influence along the
x-direction, the vertical index error
along the
z-direction and horizontal beam offset
mainly along the
y-direction. At a closer look at Equations (6)–(8), it was seen that after linearization, the influencing coefficients that filled the
matrix (see Equation (10)) were one for the corresponding quantities in the case of
(on distances) and
(on vertical angles). Regarding
, the influencing coefficients were more complex and had an impact on the horizontal and vertical angles as well as on their covariances. For a relevant inspection, only the selected parameters of the functional correlating group were assigned a value, while all other errors of the same group were set to zero. It was, however, impossible to study the functional correlating errors isolated from the non-correlating errors. This was due to the matrix’ nature, which became singular when solely considering functional correlating errors and did not have an inverse. Therefore, the optimal set of non-correlating errors (SVCM_6 see
Table 3) obtained from
Section 4.1 were kept constant for all calculated SVCMs, and only the variances of the aforementioned three functional correlating errors were varied.
4.2.1. Zero Point Error
The zero point error only affected the distances. This became clear by looking at the SVCM in observation space where the range noise was simply added to . Apart from the main diagonal, the resulting covariances after matrix multiplication were given by .
The variance of
was changed from realistic values in the range of tens of µm up to tens of millimeters. The chosen values were based on the starting value of 0.06 mm and then multiplied with a factor (see
Table 5).
According to the first evaluation criterion,
of the fully populated matrix was analyzed after the surface was estimated with each of the SVCMs from
Table 5. Within this variance level,
did not change significantly, but remained as presented in
Table 4 at SVCM_6 for all station points. Differences were only noticeable after six digits.
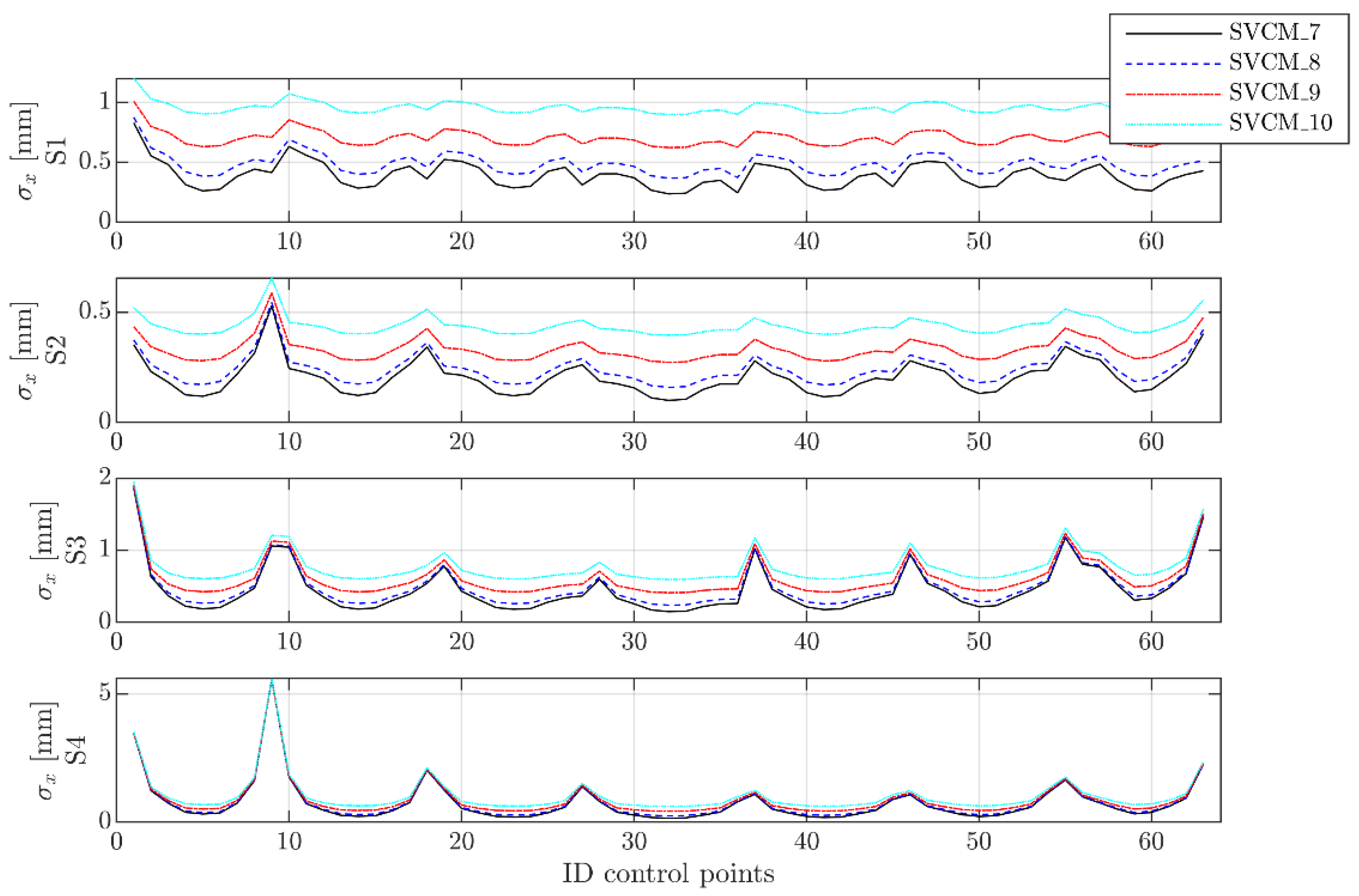
Judging by the second criterion, the accuracy of the estimated control points changed for each station point and for each SVCM. As in the previous case, precisions were lower at close range. This was especially noticeable at S1 and S2 (see
Figure 9). In the case of S2, the precisions were slightly lower than at S1; a fact that could be explained with the slightly better transformation of S2 in the LT coordinate system (0.2 mm average residuals for S2, 0.4 mm average residuals for S1). For the other station points (S3 and S4), the graphics follow a similar profile at closer inspection.
Striking in
Figure 9 are the increased values of the peaks from S1 to S4. This was mainly due to the configuration of the measurements, leading to corresponding entries in the design matrix
. At the edges of the test specimen, the observations were sparser and, thus, control points in that area were estimated with a lower precision for the different station points. A reference based on network measurements can be found in [
33]. Related to the B-spline estimation, a similar behavior of the precision measures was provided in [
15,
21].
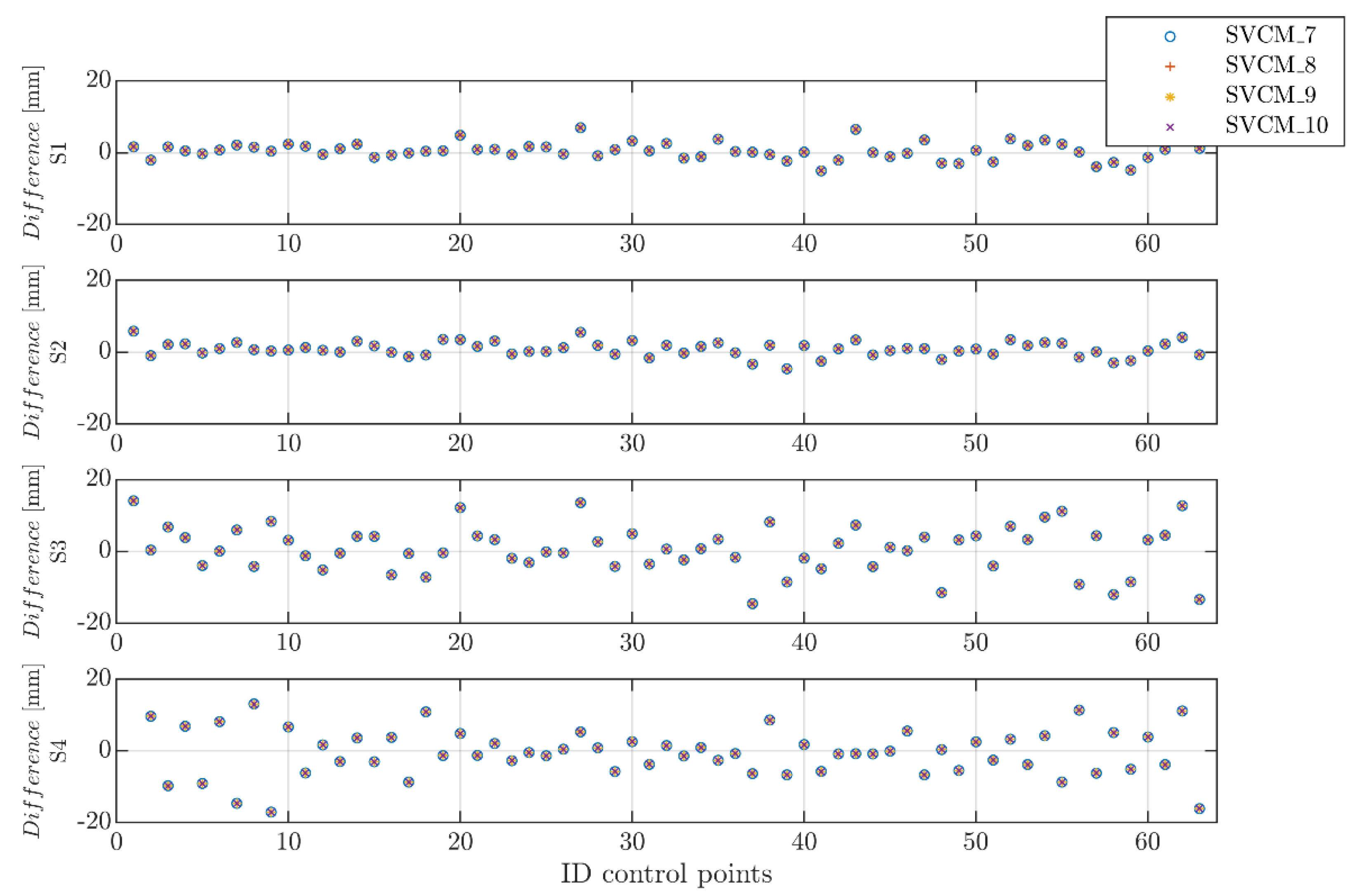
Finally, the third criterion implied analyzing the differences of the nominal control points and estimated ones. Because this error only affected the x coordinates, only this dimension was presented for the comparison. For each station point, all versions of SVCMs were used for the estimation. Results are presented in
Figure 10.
As can be seen, there were no noticeable differences in the x-direction for the matrices SVCM_7 to SVCM_10.
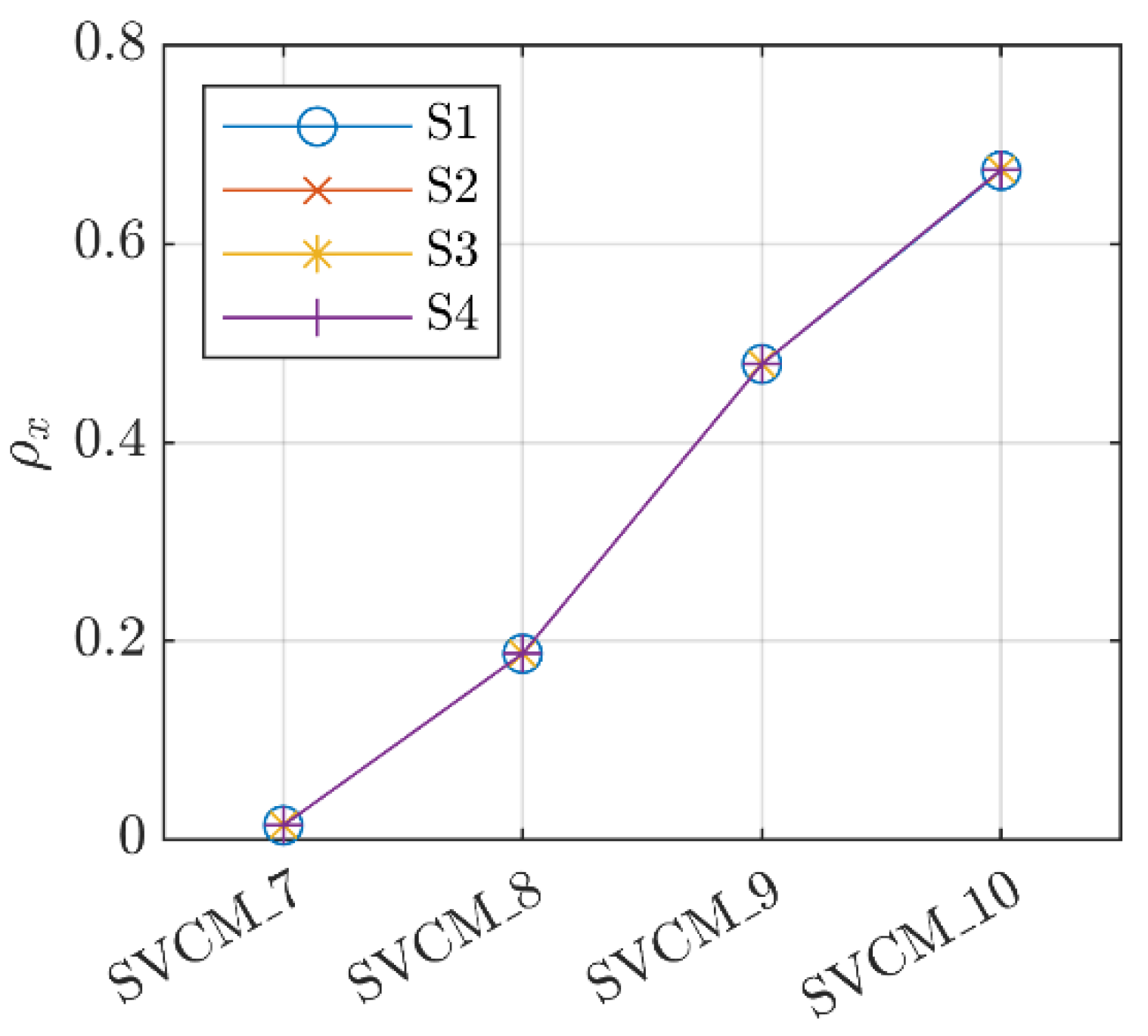
Another aspect that was studied was the average spatial correlation coefficient between the points in the point cloud. A correlation matrix was computed based on different versions of the SVCM and afterwards, coefficients were extracted for all elements along one axis (here x).
Figure 11 shows how the spatial correlation coefficient increased in all four versions of the SVCM and for all station points with an increasing variance of
. If this was analyzed together with the numerical value for the range noise variance
, then the correlation coefficient
was exactly 0.5 when
=
. When this threshold was exceeded,
started to dominate the variances.
Comparable results were found for the vertical index error
. The corresponding results and figures can be found in
Appendix A.
4.2.2. Horizontal Beam Offset
In contrast to other functional correlating errors, differently influenced horizontal and vertical angles, as well as the covariances between these. In all cases, the influence on the SVCMs was proportional with the scanning distance. As seen in Equation (10), the influencing factors were the range R as the denominator, meaning that at close ranges the same variance had a higher impact than at longer ranges.
Further on, the standard deviation of the horizontal beam offset
was scaled starting from realistic values of 0.14 mm up to 1.12 mm (
Table 6).
As in the previous cases, the global quality indicator did not change.
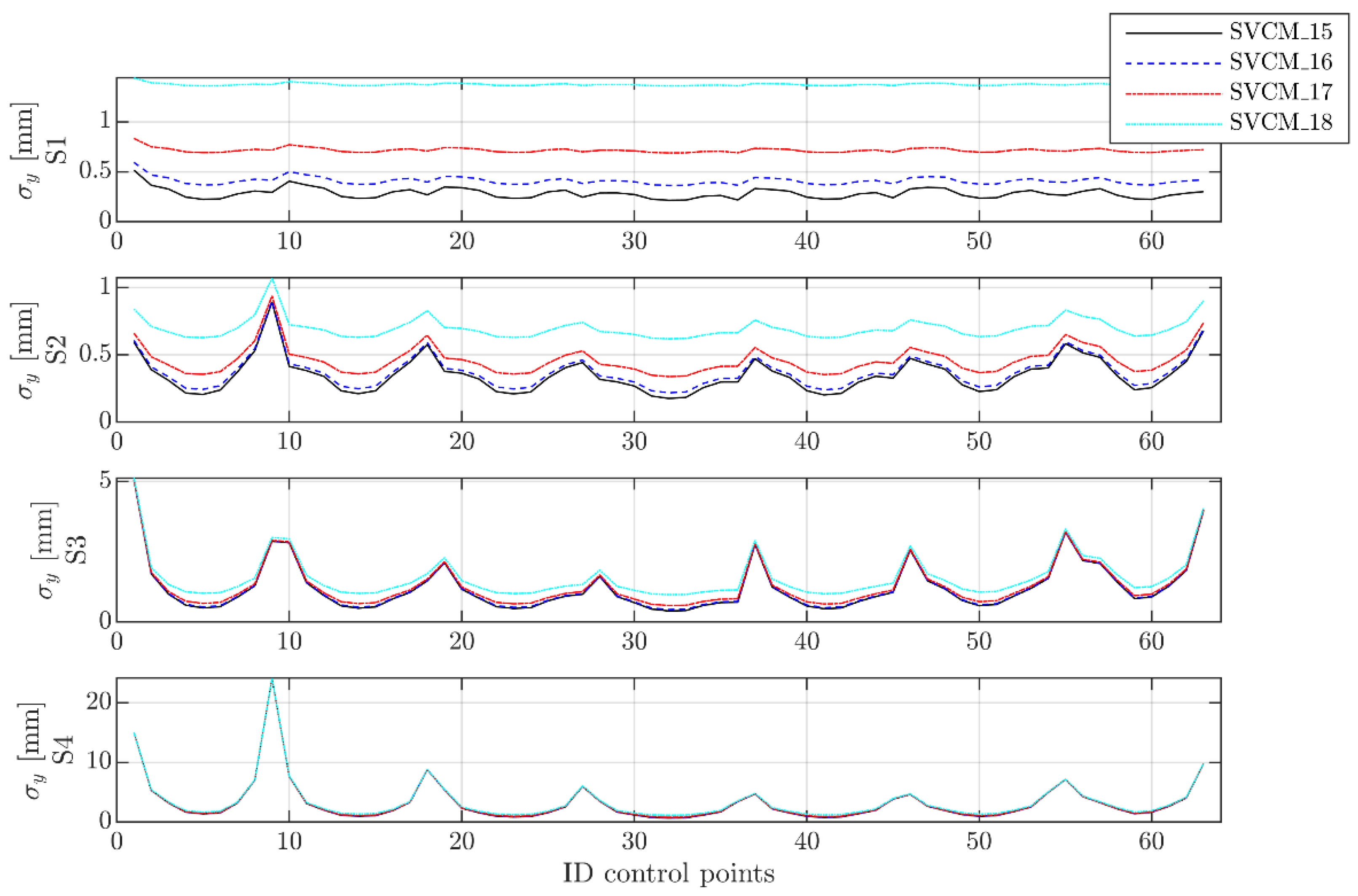
Considering the second criterion, accuracies of the estimated control points were better at close range for reduced variance levels. This was especially noticeable at the first two station points (see
Figure 12). The small differences that occurred between S1 and S2 were explainable by the better transformation residuals of S2 in the LT system. The estimation with the best precisions was obtained with SVCM_15 in this case where the variance level was the one determined by the TLS calibration. When compared with the precisions of the estimated control points for the other two individual errors, it was seen that at a close range (S1), the precisions remained approximately constant at the same level. All other station points showed a similar spike profile (saw profile), indicating that the position of control points played an important role especially at longer ranges.
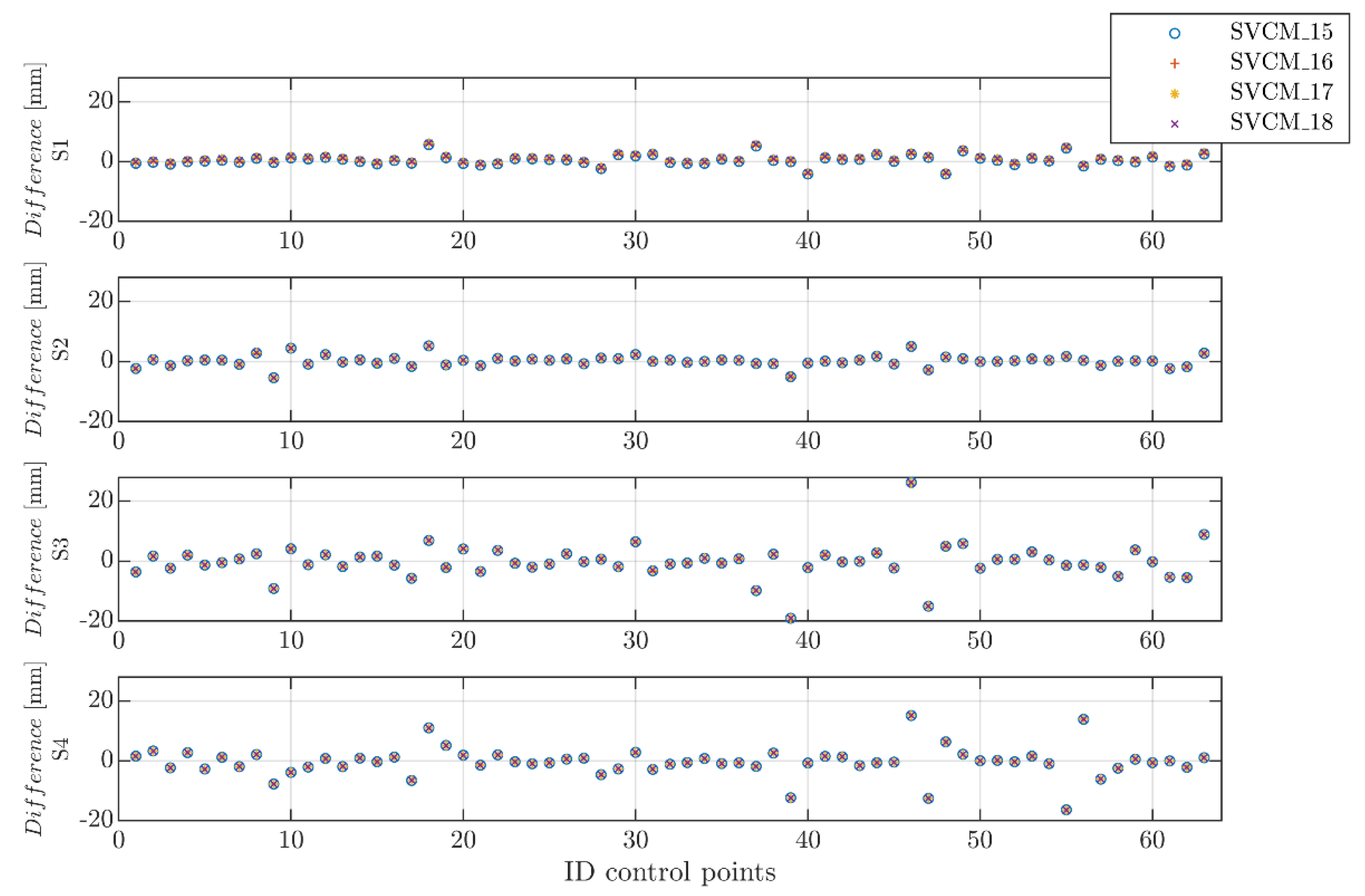
The differences of the nominal control points and the estimated ones in
y-direction were the same in three out of four cases for all versions of the SVCM (
Figure 13). Only in the case of S1, differences in a few tenths of mm occurred and this fact was directly related with the above-mentioned denominator. Just to give an example, the same value of
was denominated at S1 with 6² m whilst at S4 with 44² m; therefore, having a considerable effect at close ranges.
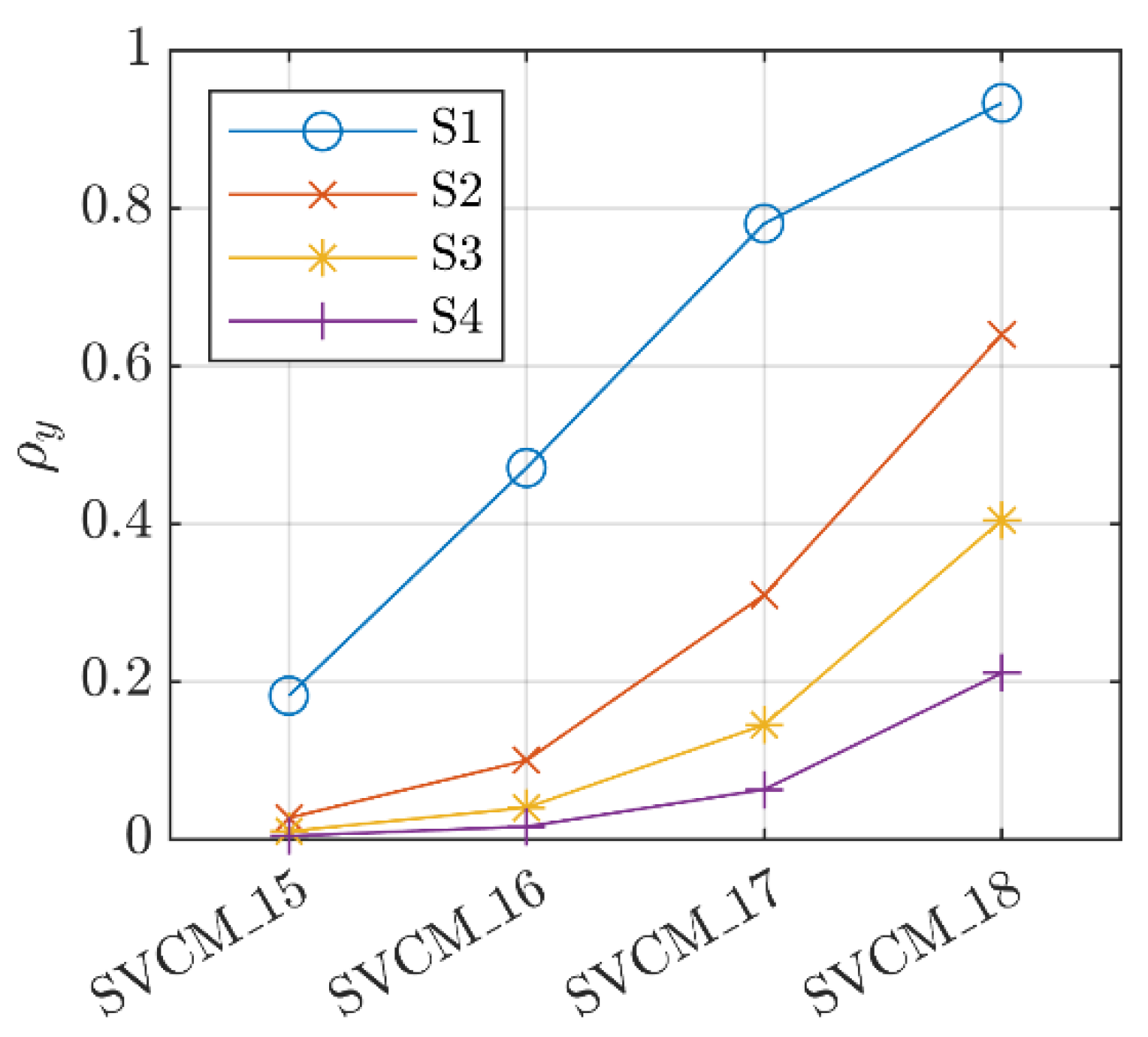
When inspecting the spatial correlations, it was obvious that these were different for all versions of the SVCM as well as for each station point (
Figure 14). Firstly, this showed the more complex impact of the horizontal beam offset on the SVCM and pointed out that the scanning configuration (distance from scanner to object) together with the variance level was decisive for the spatial correlations. The reason for this was, as explained before, a normalization by R² of the covariances that affected the
y-direction.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















