
Deep Learning for Polarimetric Radar Quantitative Precipitation Estimation during Landfalling Typhoons in South China

 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Data
2.1. Dual-Polarization Radar Data
2.2. Automatic Weather Station (AWS) Data
3. Methods
3.1. Model Inputs
3.2. Model Architecture
3.3. Training Strategies
3.4. Evaluation Method
4. Results
4.1. Performance of the QPENet Algorithm
4.2. Effect of Input Data on the Performance of the QPENet Algorithms
5. Performance Comparisons between the QPEDSD and QPENetV2 Algorithms
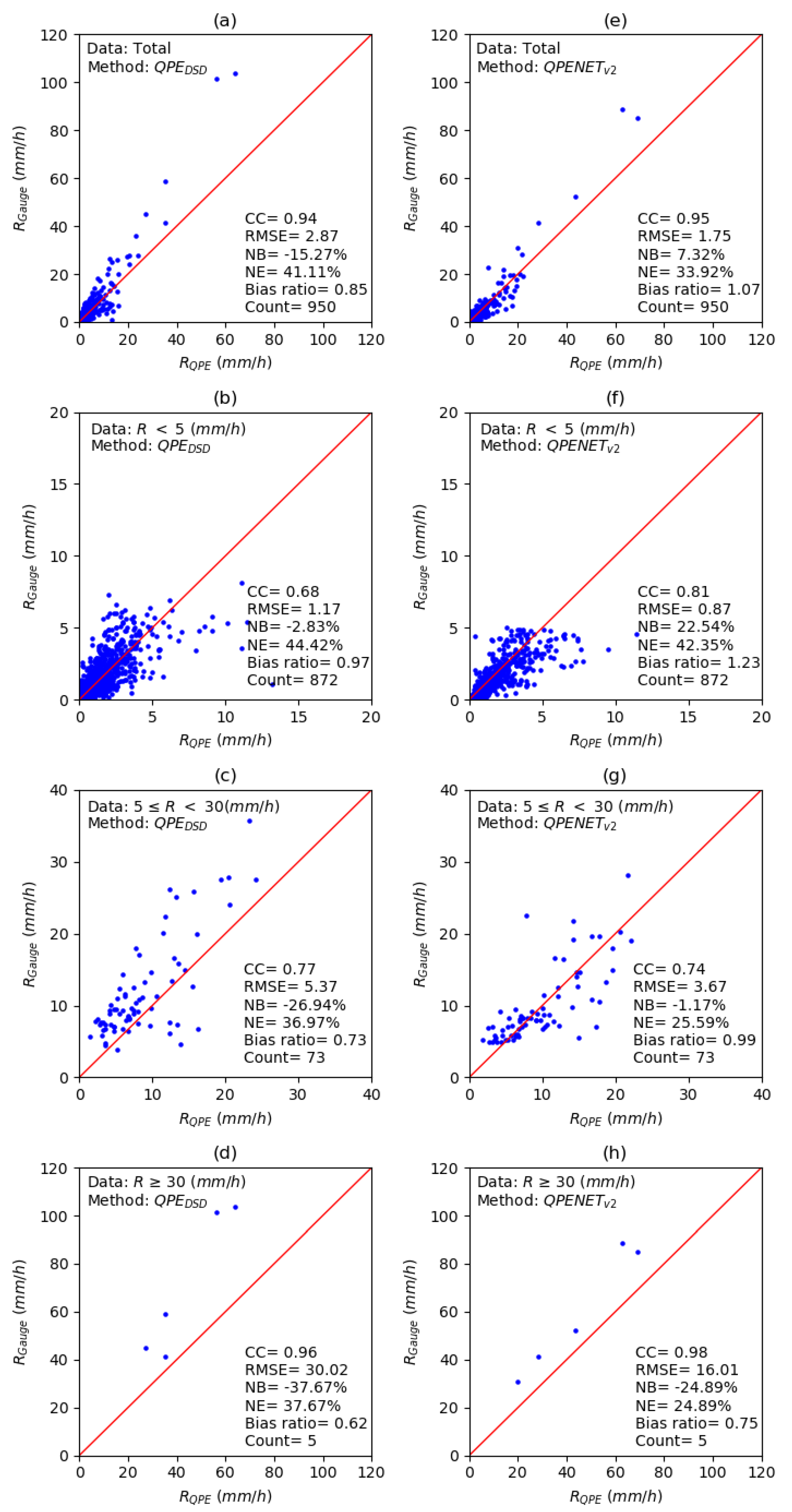
5.1. Performance of QPEDSD and QPENetV2 under Different Rainfall Intensities
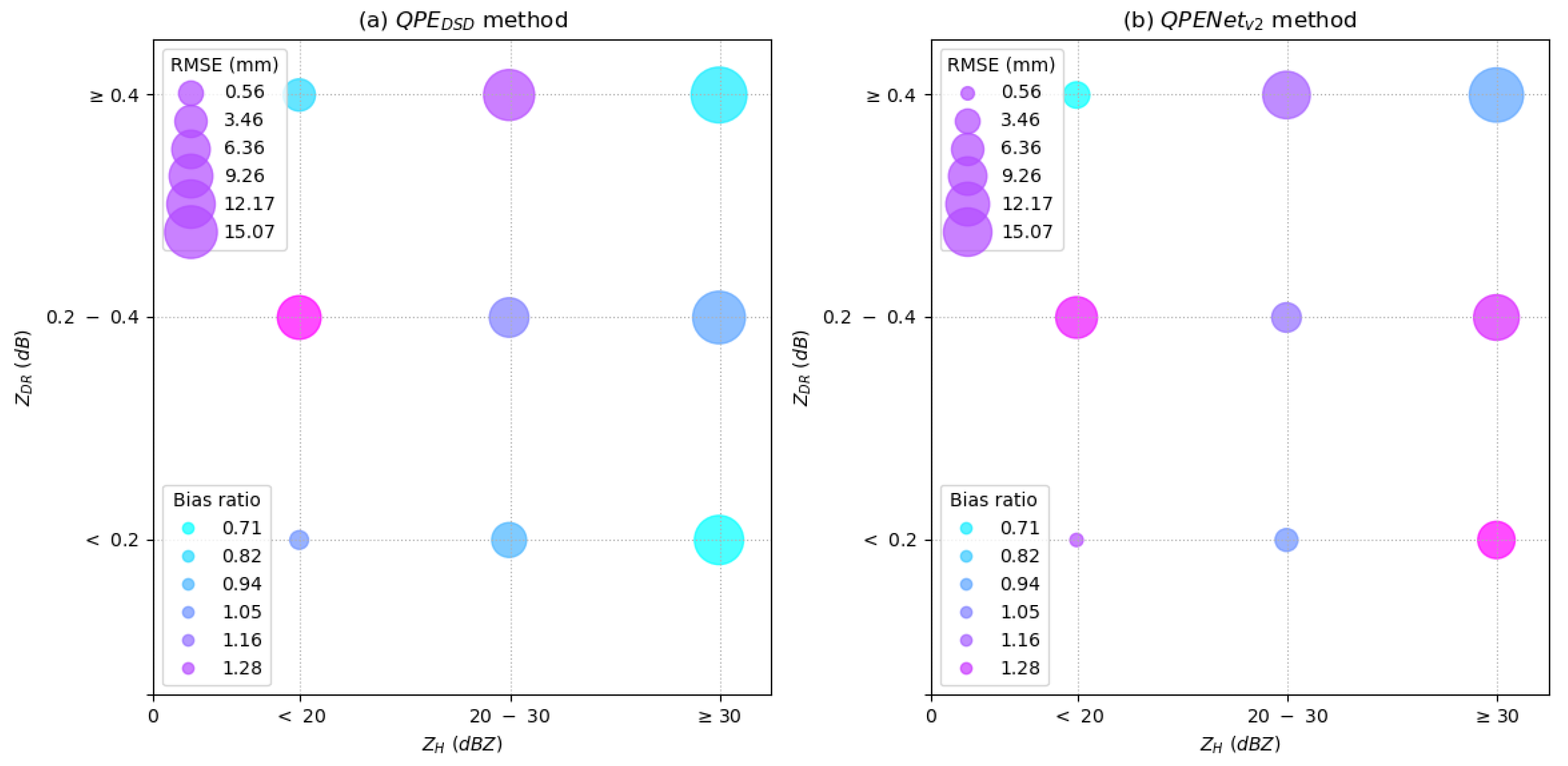
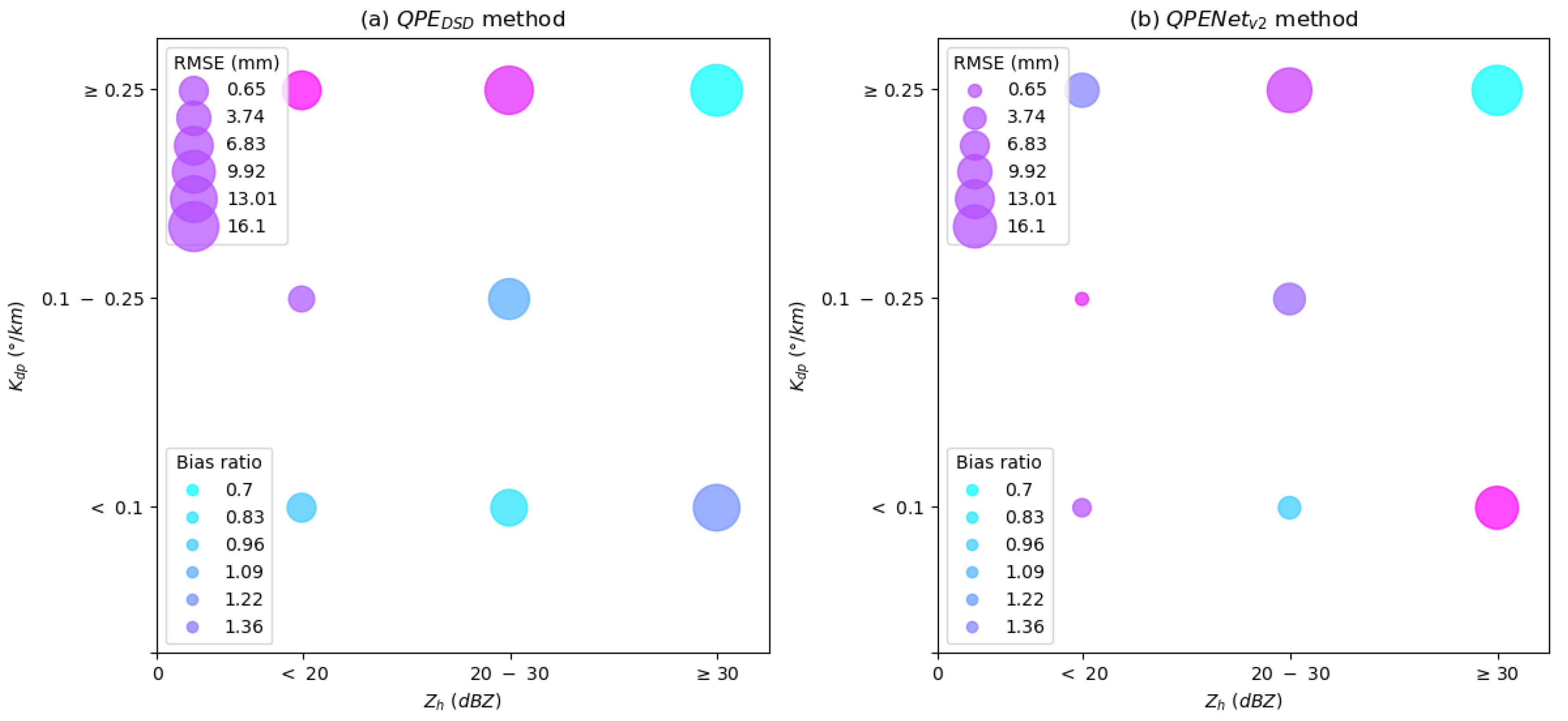
5.2. Performance of QPEDSD and QPENetV2 on Different Segments of ZH, ZDR, and KDP
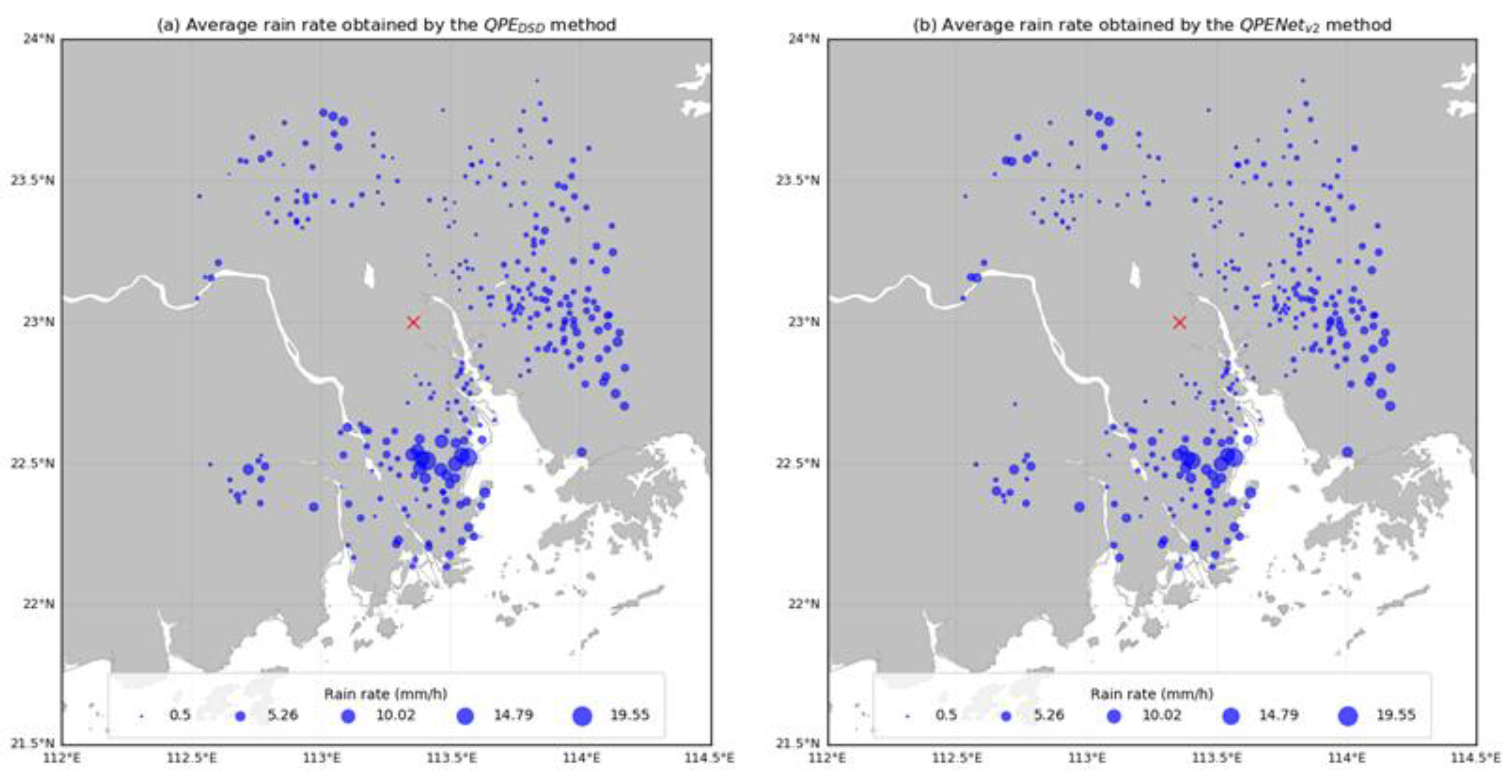
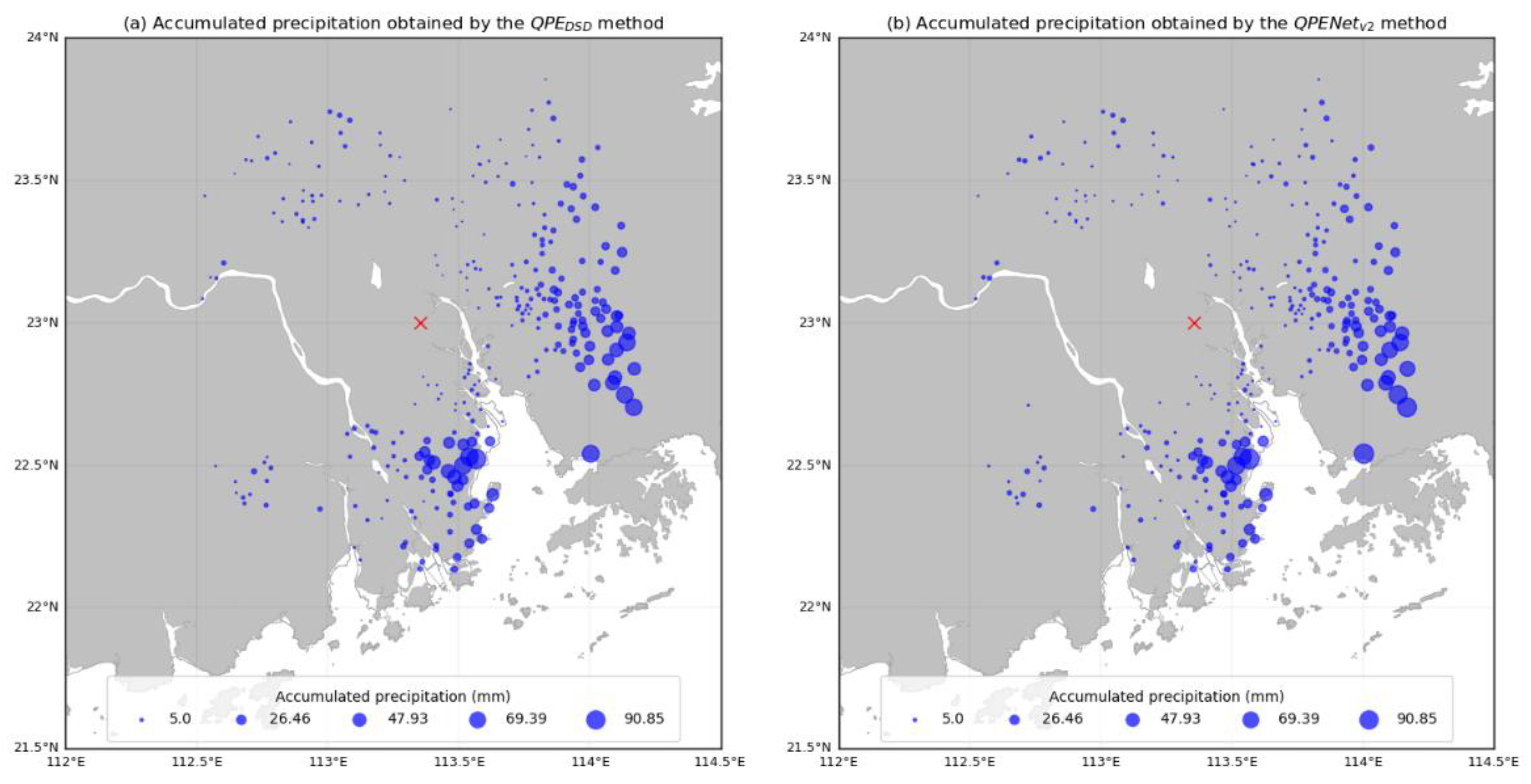
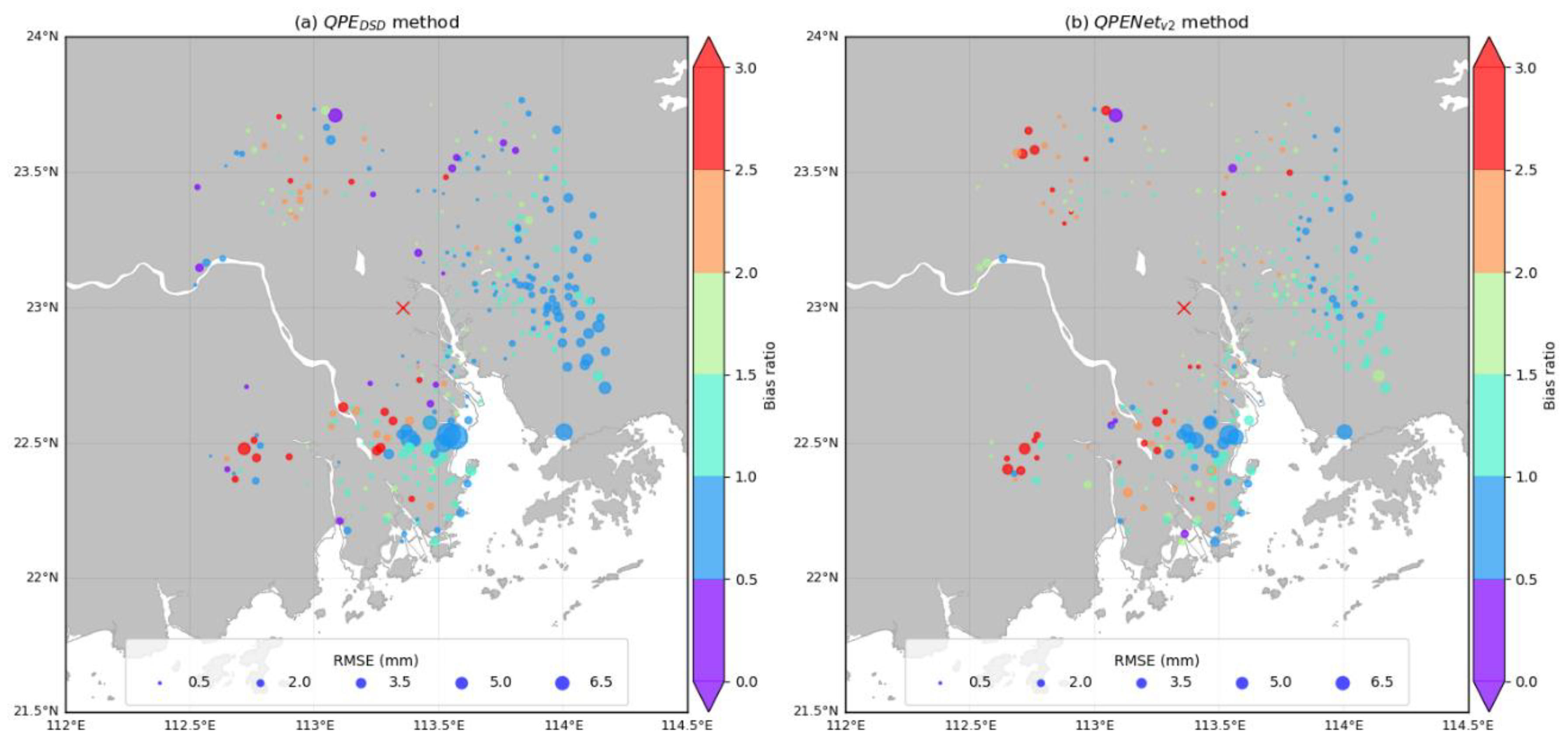
5.3. Spatial Distribution of the Errors Associated with QPEDSD and QPENetV2
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yin, J.; Yin, Z.; Xu, S. Composite risk assessment of typhoon-induced disaster for China’s coastal area. Nat. Hazards 2013, 69, 1423–1434. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar: Principles and Applications; Cambridge University Press: Cambridge, UK, 2001; pp. 635–636. [Google Scholar]
- Chen, H.; Chandrasekar, V.; Tan, H.; Cifelli, R. Rainfall Estimation From Ground Radar and TRMM Precipitation Radar Using Hybrid Deep Neural Networks. Geophys. Res. Lett. 2019, 46, 10669–10678. [Google Scholar] [CrossRef]
- Cifelli, R.; Chandrasekar, V.; Chen, H.; Johnson, L.E. High Resolution Radar Quantitative Precipitation Estimation in the San Francisco Bay Area: Rainfall Monitoring for the Urban Environment. J. Meteorol. Soc. Jpn. 2018, 96, 141–155. [Google Scholar] [CrossRef] [Green Version]
- Gou, Y.; Ma, Y.; Chen, H.; Wen, Y. Radar-derived quantitative precipitation estimation in complex terrain over the eastern Tibetan Plateau. Atmos. Res. 2018, 203, 286–297. [Google Scholar] [CrossRef]
- Xia, Q.; Zhang, W.; Chen, H.; Lee, W.-C.; Han, L.; Ma, Y.; Liu, X. Quantification of Precipitation Using Polarimetric Radar Measurements during Several Typhoon Events in Southern China. Remote Sens. 2020, 12, 2058. [Google Scholar] [CrossRef]
- Ryzhkov, A.V.; Schuur, T.J.; Burgess, D.W.; Heinselman, P.L.; Giangrande, S.E.; Zrnic, D.S. The joint polarization experiment: Polarimetric rainfall measurements and hydrometeor classification. Bull. Am. Meteorol. Soc. 2005, 86, 809–824. [Google Scholar] [CrossRef] [Green Version]
- Xiao, R.; Chandrasekar, V. Development of neural network based algorithm for rainfall estimation based on radar measurements. IEEE Trans. Geosci. Remote Sens. 1997, 35, 160–171. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Chandrasekar, V.; Cifelli, R. A Deep Learning Approach to Dual-Polarization Radar Rainfall Estimation. In Proceedings of the 2019 URSI Asia-Pacific Radio Science Conference (AP-RASC), New Delhi, India, 9–15 March 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Xu, G.; Chandrasekar, V. Operational Feasibility of Neural-Network-Based Radar Rainfall Estimation. IEEE Geosci. Remote Sens. Lett. 2005, 2, 13–17. [Google Scholar] [CrossRef]
- Vulpiani, G.; Giangrande, S.; Marzano, F.S. Rainfall estimation from polarimetric S-band radar measurements: Validation of a neutral netwrok approach. J. Appl. Meteorol. Climatol. 2009, 48, 2022–2036. [Google Scholar] [CrossRef]
- Dolan, B.; Fuchs, B.; Rutledge, S.A.; Barnes, E.; Thompson, E.J. Primary Modes of Global Drop Size Distributions. J. Atmos. Sci. 2018, 75, 1453–1476. [Google Scholar] [CrossRef]
- Wen, G.; Chen, H.; Zhang, G.; Sun, J. An Inverse Model for Raindrop Size Distribution Retrieval with Polarimetric Variables. Remote Sens. 2018, 10, 1179. [Google Scholar] [CrossRef] [Green Version]
- Kitchen, M.; Brown, R.; Davies, A.G. Real-time correction of weather radar data for the effects of bright band, range and orographic growth in widespread precipitation. Q. J. R. Meteorol. Soc. 1994, 120, 1231–1254. [Google Scholar] [CrossRef]
- Steiner, M.; Smith, J.A. Reflectivity, Rain Rate, and Kinetic Energy Flux Relationships Based on Raindrop Spectra. J. Appl. Meteorol. 2000, 39, 1923–1940. [Google Scholar] [CrossRef]
- Kirstetter, P.-E.; Gourley, J.J.; Hong, Y.; Zhang, J.; Moazamigoodarzi, S.; Langston, C.; Arthur, A. Probabilistic precipitation rate estimates with ground-based radar networks. Water Resour. Res. 2015, 51, 1422–1442. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Bechini, R. An Improved Dual-Polarization Radar Rainfall Algorithm (DROPS2.0): Application in NASA IFloodS Field Campaign. J. Hydrometeorol. 2017, 18, 917–937. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Han, L.; Zhao, Y.; Chen, H.; Chandrasekar, V. Advancing Radar Nowcasting Through Deep Transfer Learning. IEEE Trans. Geosci. Remote Sens. 2021, in press. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Cifelli, R.; Xie, P. A Machine Learning System for Precipitation Estimation Using Satellite and Ground Radar Network Observations. IEEE Trans. Geosci. Remote Sens. 2019, 58, 982–994. [Google Scholar] [CrossRef]
- Tan, H.; Chandra, C.V.; Chen, H. A Deep Neural Network Model for Rainfall Estimation Using Polarimetric WSR-88DP Radar Observations. American Geophysical Union, Fall Meeting, 2016, abstract #IN11B-1622. Available online: https://agu.confex.com/agu/fm16/meetingapp.cgi/Paper/196830 (accessed on 1 June 2021).
- Tan, H.; Chandrasekar, V.; Chen, H. A Machine Learning Model for Radar Rainfall Estimation Based on Gauge Observations. In Proceedings of the 2017 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Montreal, QC, Canada, 19–26 August 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Cifelli, R.; Xie, P.; Tan, H. A data fusion system for accurate precipitation estimation using satellite and ground radar observations: Urban scale application in Dallas-Fort Worth Metroplex. In Proceedings of the 2017 XXXIInd General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Montreal, QC, Canada, 19–26 August 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Chandrasekar, V.; Tan, H.; Chen, H. A machine learning system for rainfall estimation from spaceborne and ground radars. In Proceedings of the 2017 XXXIInd General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Montreal, QC, Canada, 19–26 August 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Moraux, A.; Dewitte, S.; Cornelis, B.; Munteanu, A. Deep Learning for Precipitation Estimation from Satellite and Rain Gauges Measurements. Remote Sens. 2019, 11, 2463. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Liu, L.; Wei, M.; Xi, B.; Yu, M. Statistics-based optimization of the polarimetric radar hydrometeor classification algorithm and its application for a squall line in South China. Adv. Atmos. Sci. 2018, 35, 296–316. [Google Scholar] [CrossRef]
- Wang, Y.; Chandrasekar, V. Algorithm for Estimation of the Specific Differential Phase. J. Atmos. Ocean. Technol. 2009, 26, 2565–2578. [Google Scholar] [CrossRef]
- Gou, Y.; Liu, L.; Yang, J.; Wu, C. Operational application and evaluation of the quantitative precipitation estimates algorithm based on the multi–radar mosaic. Acta Meteorol. Sin. 2014, 72, 731–748. (In Chinese) [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deep-er with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Minh Nguyen, D.; Deligiannis, N.; Ding, W.; Munteanu, A. Hourglass-shapenetwork based semantic segmentation for high resolution aerial imagery. Remote Sens. 2017, 9, 522. [Google Scholar] [CrossRef] [Green Version]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010; pp. 249–256. [Google Scholar]
- Zhang, Y.; Liu, L.; Bi, S.; Wu, Z.; Shen, P.; Ao, Z.; Chen, C.; Zhang, Y. Analysis of Dual-Polarimetric Radar Variables and Quantitative Precipitation Estimators for Landfall Typhoons and Squall Lines Based on Disdrometer Data in Southern China. Atmosphere 2019, 10, 30. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Liu, L.; Wen, H.; Wu, C.; Zhang, Y. Evaluation of the Polarimetric-Radar Quantitative Precipitation Estimates of an Extremely Heavy Rainfall Event and Nine Common Rainfall Events in Guangzhou. Atmosphere 2018, 9, 330. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Name (No.) | Date (UTC) | Total Time (h) | No. of Valued gauges | No. of Radar Volumes | Mean Gauge Accumulation (mm) | Maximum Gauge Accumulation (mm) |
|---|---|---|---|---|---|---|---|
| 1 | Merbok (1702) | June 12–13, 2017 | 19 | 544 | 190 | 18.32 | 144.4 |
| 2 | Hato (1713) | August 23, 2017 | 12 | 775 | 120 | 25.22 | 54 |
| 3 | Pakhar (1714) | August 26–27, 2017 | 9 | 763 | 90 | 44.54 | 71 |
| 4 | Mawar (1716) | September 02–04, 2017 | 28 | 720 | 280 | 31.67 | 211.3 |
| 5 | Khanun (1720) | October 15–16, 2017 | 18 | 765 | 180 | 27.33 | 85.2 |
| 6 | Ewiniar (1804) | June 07–08, 2018 | 37 | 793 | 370 | 212.46 | 311.2 |
| 7 | Bebinca (1816) | August 10–15, 2018 | 119 | 804 | 1190 | 100.48 | 255.6 |
| 8 | Mangkhut (1822) | September 16, 2018 | 9 | 797 | 90 | 77.44 | 148.4 |
| 9 | Barijat (1823) | September 12–13, 2018 | 21 | 613 | 210 | 2.98 | 14 |
| 10 | Wipha (1907) | August 01–02, 2019 | 20 | 806 | 200 | 44.62 | 170.4 |
| 11 | Bailu (1911) | August 24–25, 2019 | 23 | 798 | 230 | 45.49 | 99.1 |
| # | Name (No.) | No. of Samples in Dataset V1 | No. of Samples in Dataset V2 | No. of Samples in Dataset V3 |
|---|---|---|---|---|
| 1 | Merbok (1702) | 4500 | 4502 | 4510 |
| 2 | Hato (1713) | 19,196 | 19,188 | 19,198 |
| 3 | Pakhar (1714) | 30,398 | 30,401 | 30,405 |
| 4 | Mawar (1716) | 8995 | 8992 | 8993 |
| 5 | Khanun (1720) | 11,892 | 11,880 | 11,884 |
| 6 | Ewiniar (1804) | 115,703 | 115,737 | 115,726 |
| 7 | Bebinca (1816) | 63,818 | 63,874 | 63,877 |
| 8 | Mangkhut (1822) | 47,230 | 47,220 | 47,229 |
| 9 | Barijat (1823) | 1412 | 1412 | 1414 |
| 10 | Wipha (1907) | 32,097 | 32,099 | 32,089 |
| 11 | Bailu (1911) | 39,932 | 39,935 | 39,942 |
| Total | 375,173 | 375,240 | 375,267 | |
| Total # (Filter Output) | # 1 × 1 | # 3 × 3 Reduce | # 3 × 3 | # 5 × 5 Reduce | # 5 × 5 | # 1 × 1 |
|---|---|---|---|---|---|---|
| 256 | 64 | 128 | 128 | 64 | 32 | 32 |
| 512 | 65 | 256 | 384 | 64 | 32 | 32 |
| Dataset Version | Batch Size | Convergence Epochs | Learning Rate | Time per Epoch (s) | Weight Decay |
|---|---|---|---|---|---|
| V1 | 512 | 2 | 0.001 | 114.5 | 0.0001 |
| V2 | 512 | 12 | 0.001 | 231.2 | 0.0001 |
| V3 | 256 | 26 | 0.001 | 615.4 | 0.0001 |
| QPE Algorithm | CC | RMSE | NB (%) | NE (%) | Bias Ratio |
|---|---|---|---|---|---|
| QPENetV1 | 0.93 | 2.15 | 4.14 | 38.05 | 1.04 |
| QPENeV2 | 0.95 | 1.75 | 7.32 | 33.92 | 1.07 |
| QPENetV3 | 0.96 | 1.97 | −19.42 | 36.72 | 0.81 |
| QPEDSD | 0.94 | 2.87 | −15.27 | 41.11 | 0.85 |
| QPE Algorithm | CC | RMSE | NB (%) | NE (%) | Bias Ratio |
|---|---|---|---|---|---|
| QPENetV1 | 0.78 | 0.96 | 22.25 | 45.10 | 1.22 |
| QPENetV2 | 0.81 | 0.87 | 22.54 | 42.35 | 1.23 |
| QPENetV3 | 0.74 | 0.84 | −14.14 | 41.58 | 0.86 |
| QPEDSD | 0.68 | 1.17 | −2.83 | 44.42 | 0.97 |
| QPE Algorithm | CC | RMSE | NB (%) | NE (%) | Bias Ratio |
|---|---|---|---|---|---|
| QPENetV1 | 0.70 | 3.92 | −5.22 | 29.05 | 0.95 |
| QPENeV2 | 0.74 | 3.67 | −1.17 | 25.59 | 0.99 |
| QPENetV3 | 0.76 | 4.10 | −22.74 | 32.70 | 0.77 |
| QPEDSD | 0.77 | 5.37 | −26.94 | 36.97 | 0.73 |
| QPE Algorithm | CC | RMSE | NB (%) | NE (%) | Bias Ratio |
|---|---|---|---|---|---|
| QPENetV1 | 1.00 | 22.03 | −35.88 | 35.88 | 0.64 |
| QPENeV2 | 0.98 | 16.01 | −24.89 | 24.89 | 0.75 |
| QPENetV3 | 0.98 | 19.24 | −29.63 | 29.63 | 0.70 |
| QPEDSD | 0.96 | 30.02 | −37.67 | 37.67 | 0.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Bi, S.; Liu, L.; Chen, H.; Zhang, Y.; Shen, P.; Yang, F.; Wang, Y.; Zhang, Y.; Yao, S. Deep Learning for Polarimetric Radar Quantitative Precipitation Estimation during Landfalling Typhoons in South China. Remote Sens. 2021, 13, 3157. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163157
Zhang Y, Bi S, Liu L, Chen H, Zhang Y, Shen P, Yang F, Wang Y, Zhang Y, Yao S. Deep Learning for Polarimetric Radar Quantitative Precipitation Estimation during Landfalling Typhoons in South China. Remote Sensing. 2021; 13(16):3157. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163157
Chicago/Turabian StyleZhang, Yonghua, Shuoben Bi, Liping Liu, Haonan Chen, Yi Zhang, Ping Shen, Fan Yang, Yaqiang Wang, Yang Zhang, and Shun Yao. 2021. "Deep Learning for Polarimetric Radar Quantitative Precipitation Estimation during Landfalling Typhoons in South China" Remote Sensing 13, no. 16: 3157. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13163157