
Data-Driven Interpolation of Sea Surface Suspended Concentrations Derived from Ocean Colour Remote Sensing Data


 ,
,  and
and
Abstract
:1. Introduction
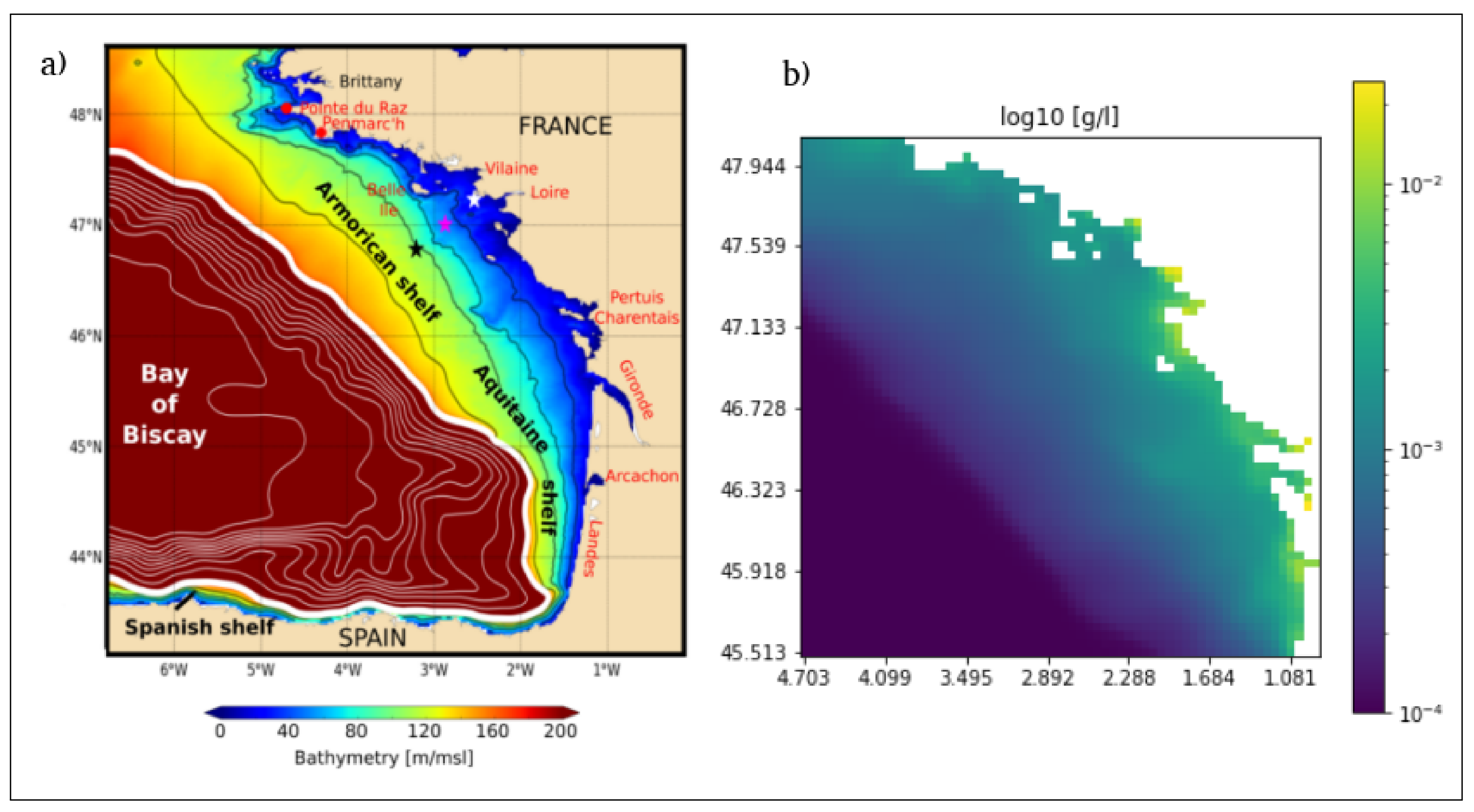
2. Case Study and Data
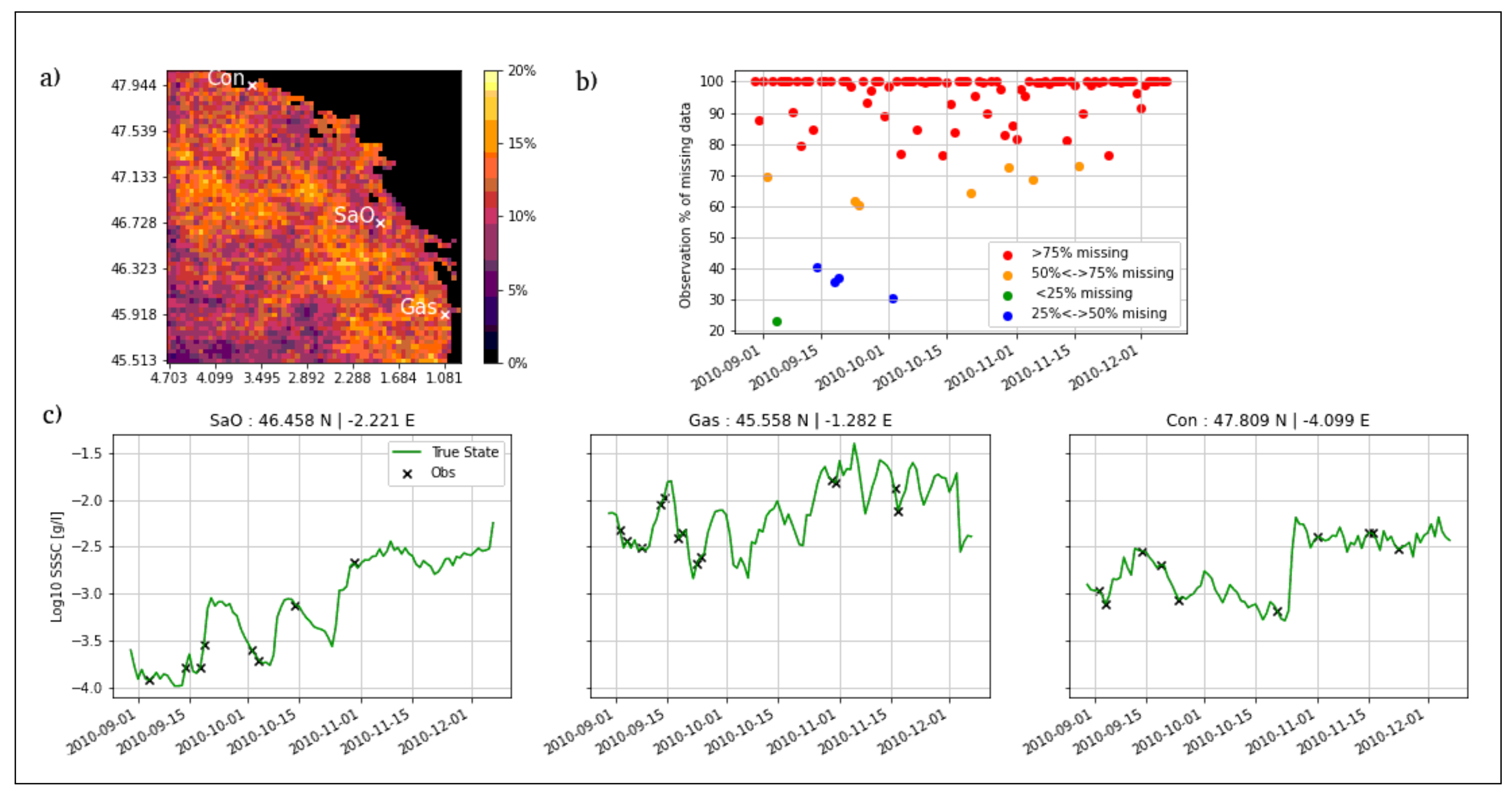
2.1. Data
- With in situ data (Reference [28], Section 4): In situ data were collected at one station of latitude 4715.592N and longitude 232.972W, located near the coast of southern Brittany and close to the city of “Le Croisic”. There, in situ Suspended Sediment Concentration (SSC) were measured from 25 November 2007 to 31 January 2008 with an upward looking 1 MHz Acoustic Wave And Current (AWAC) Nortek profiler put, with a turbidimeter, on a bottom mooring at a depth of 23 m. The SSC has been measured in the whole water column of more than 20 m by the AWAC profiler, calibrated with the turbidimeter, itself calibrated with SSC results obtained through water samples (Reference [28], Section 2.2). Model results show good agreement with in situ data. Quantitatively, an RMSE of 10.5 mg/L between model and in situ data has been obtained for SSC (from the AWAC profiler) ranging between 10 and 80 mg/L over the whole water column.
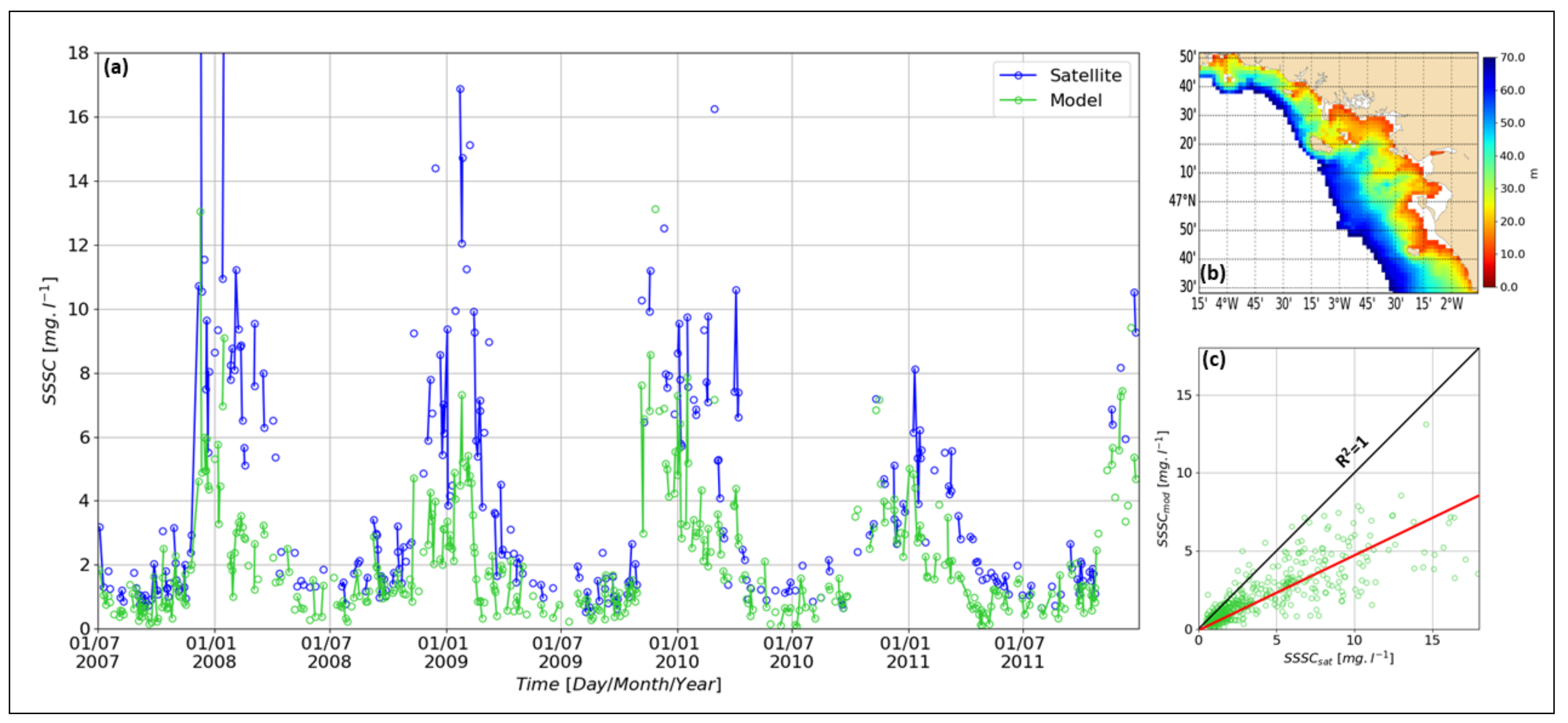
- With satellite data; see Figure 2: The satellite data are derived from the Non Algal Particles (NAP) algorithm from [29] applied to the MERIS satellite sensor dataset available from 2007 to 2011 and daily sampled. Figure 2a,c show that MARS-MUSTANG model fit barely well with the dynamics of the turbidity observed by the satellite, but with a mean intensity in concentration that is half the mean of satellite concentrations observed through its NAP algorithm.
2.2. Osse and Benchmarking Framework
3. Methods
3.1. Optimal Interpolation
3.2. DINEOF
3.3. AnDA
3.4. 4DVarNet
- AE-4DVarNet: this architecture exploits a convolutional auto-encoder (AE) architecture for operator . The AE first encodes the input field x into a low-dimensional feature vector and then applies a decoder to map this feature vector to a reconstructed field . The detailed specification of the AE architecture for operator is provided in Appendix A.1.
- GE-4DVarNet: this architecture exploits a two-scale U-net-like architecture for operator according to Reference [41]. Contrary to the AE-based setting, it does not involve a dimension reduction step. The resulting energy may be interpreted in terms of Markovian prior as detailed in Reference [41]. The detailed specification of the considered U-Net-like architecture is reported in Appendix A.2.
4. Results
4.1. Metrics and Evaluation
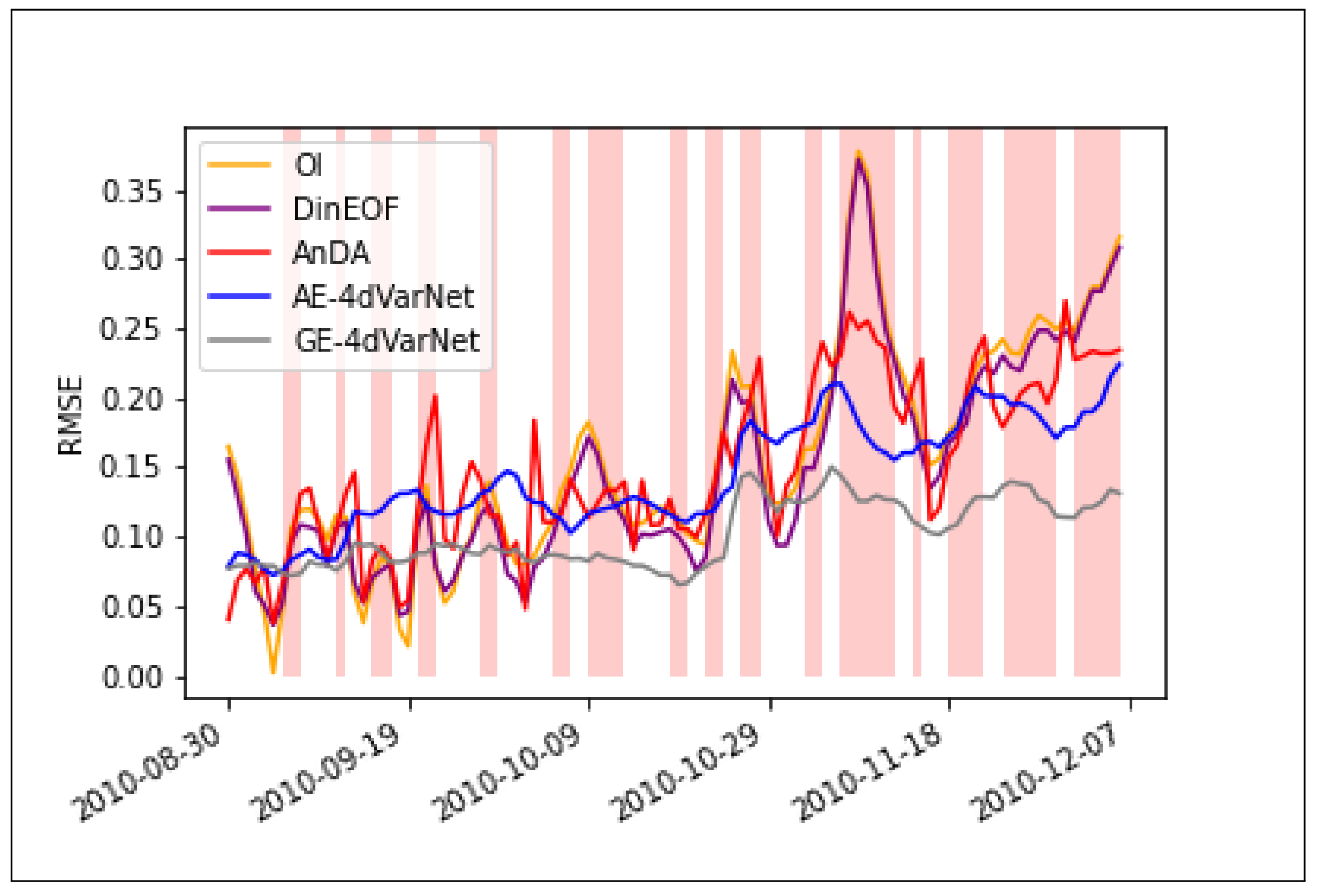
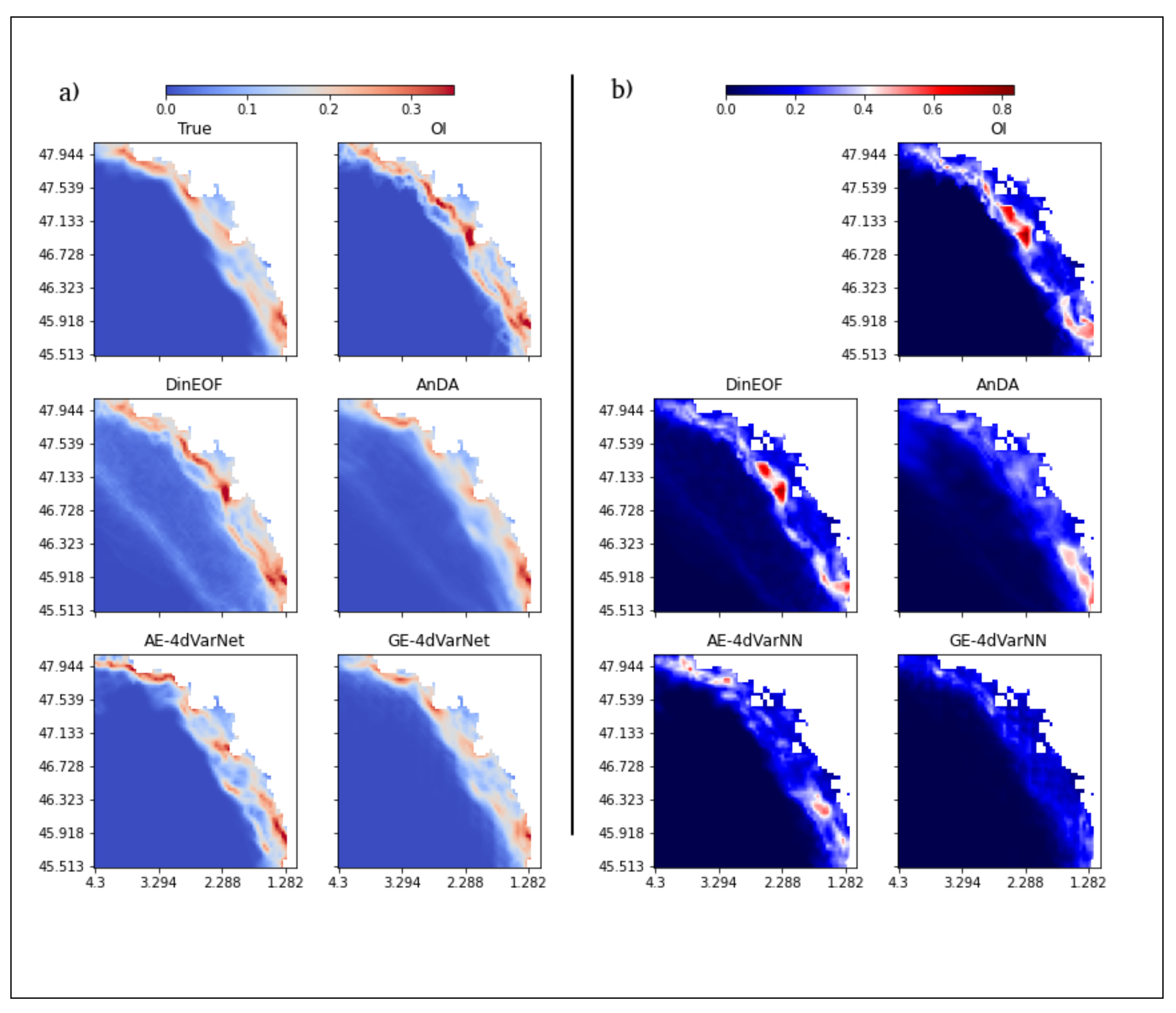
4.2. Global Performance
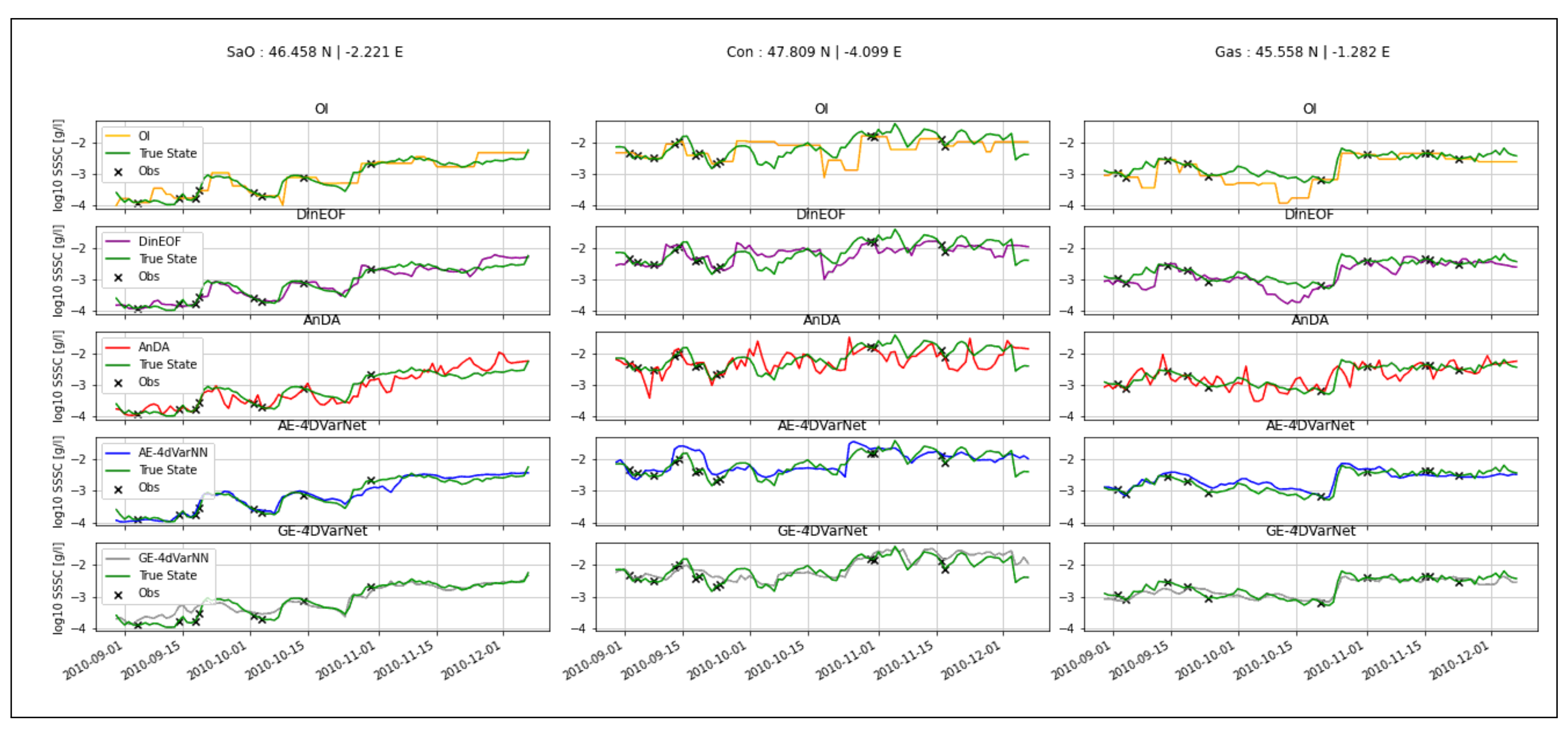
4.3. Reconstruction of Time Patterns
5. Discussion
6. Conclusions
7. Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Architecture of the Autoencoder Operator ϕ (AE-NN)
- Conv2D (Relu activation, 30 filters, 3 × 3 kernels, average pooling layer);
- Conv2D (Relu activation, 60 filters, 3 × 3 kernels, average pooling layer);
- Conv2D (Relu activation, 120 filters, 3 × 3 kernels, average pooling layer);
- Conv2D (Relu activation, 240 filters, 6 × 6 kernels, average pooling layer);
- Conv2D (Linear activation, 30 filters, 3 × 3 kernels).
- Conv2DTranspose (Relu activation, 256 filters, 8 × 8 kernels);
- Conv2DTranspose (Relu activation, 128 filters, 3 × 3 kernels);
- Conv2DTranspose (Relu activation, 64 filters, 3 × 3 kernels);
- Conv2DTranspose (Relu activation, 20 filters, 3 × 3 kernels);
- Conv2D (Relu activation, 40 filters, 3 × 3 kernels, average pooling layer);
- Conv2D (Linear activation, 64 filters, 3 × 3 kernels).
Appendix A.2. Architecture of the Gibbs-Energy Operator ϕ (GE-NN)
- AveragePolinglayer (4 × 4);
- Conv2D (Relu activation, 40 filters, 3 × 3 kernels) with a null-weight constraint for the center of the convolution window;
- Conv2D (Relu activation, 40 filters, 1 × 1 kernels);
- a residual network [51] with the following residual block: Conv2D (Relu activation, 240 filters, 200 × 200 × (5 × 40) kernels, average pooling layer);Conv2D ( Relu activation, 40 filters, 1 × 1 kernel);
- Upsampling to the original input shape is processed by a Conv2DTranspose (Linear activation, 4 × 4 kernels).
References
- Owens, P.N. Soil erosion and sediment dynamics in the Anthropocene: A review of human impacts during a period of rapid global environmental change. J. Soils Sediments 2020, 20, 4115–4143. [Google Scholar] [CrossRef]
- Irabien, M.J.; Cearreta, A.; Gómez-Arozamena, J.; Gardoki, J.; Martín-Consuegra, A.F. Recent coastal anthropogenic impact recorded in the Basque mud patch (southern Bay of Biscay shelf). Quat. Int. 2020, 566–567, 357–367. [Google Scholar] [CrossRef]
- Brand, E.; Chen, M.; Montreuil, A.L. Optimizing measurements of sediment transport in the intertidal zone. Earth-Sci. Rev. 2020, 200. [Google Scholar] [CrossRef]
- Vercruysse, K.; Grabowski, R.C.; Rickson, R.J. Suspended sediment transport dynamics in rivers: Multi-scale drivers of temporal variation. Earth-Sci. Rev. 2017, 166, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Haalboom, S.; de Stigter, H.; Duineveld, G.; van Haren, H.; Reichart, G.J.; Mienis, F. Suspended particulate matter in a submarine canyon (Whittard Canyon, Bay of Biscay, NE Atlantic Ocean): Assessment of commonly used instruments to record turbidity. Mar. Geol. 2021, 434, 10639. [Google Scholar] [CrossRef]
- Le Hir, P.; Monbet, Y.; Orvain, F. Sediment erodability in sediment transport modelling: Can we account for biota effects? Cont. Shelf Res. 2007, 27, 1116–1142. [Google Scholar] [CrossRef]
- Wang, Y.P.; Voulgaris, G.; Li, Y.; Yang, Y.; Gao, J.; Chen, J.; Gao, S. Sediment resuspension, flocculation, and settling in a macrotidal estuary. J. Geophys. Res. Ocean. 2013. [Google Scholar] [CrossRef]
- Allard, R.; Barron, C.; Blain, C.A.; Hogan, P.; Keen, T.; Smedstad, L.; Wallcraft, A.; Berger, C.; Howington, S.; Smith, J.; et al. High Fidelity Simulations of Littoral Environments; Office of Naval Research, Stennis Space Center: Hancock County, MS, USA, 2003; p. 16. [Google Scholar]
- Renosh, P.R.; Jourdin, F.; Charantonis, A.A.; Yala, K.; Rivier, A.; Badran, F.; Thiria, S.; Guillou, N.; Leckler, F.; Gohin, F.; et al. Construction of multi-year time-series profiles of suspended particulate inorganic matter concentrations using machine learning approach. Remote Sens. 2017, 9, 1320. [Google Scholar] [CrossRef] [Green Version]
- Moore, A.M.; Martin, M.J.; Akella, S.; Arango, H.G.; Balmaseda, M.; Bertino, L.; Ciavatta, S.; Cornuelle, B.; Cummings, J.; Frolov, S.; et al. Synthesis of ocean observations using data assimilation for operational, real-time and reanalysis systems: A more complete picture of the state of the ocean. Front. Mar. Sci. 2019, 6, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Nazeer, M.; Bilal, M.; Alsahli, M.; Shahzad, M.; Waqas, A. Evaluation of Empirical and Machine Learning Algorithms for Estimation of Coastal Water Quality Parameters. ISPRS Int. J. Geo-Inf. 2017, 6, 360. [Google Scholar] [CrossRef] [Green Version]
- Jin, D.; Lee, E.; Kwon, K.; Kim, T. A Deep Learning Model Using Satellite Ocean Color and Hydrodynamic Model to Estimate Chlorophyll- a Concentration. Remote Sens. 2021, 13, 2003. [Google Scholar] [CrossRef]
- Sanchez-Arcilla, A.; Staneva, J.; Cavaleri, L.; Badger, M.; Bidlot, J.; Sorensen, J.T.; Hansen, L.B.; Martin, A.; Saulter, A.; Espino, M.; et al. CMEMS-Based Coastal Analyses: Conditioning, Coupling and Limits for Applications. Front. Mar. Sci. 2021, 8. [Google Scholar] [CrossRef]
- He, X.; Bai, Y.; Pan, D.; Huang, N.; Dong, X.; Chen, J.; Chen, C.T.A.; Cui, Q. Using Geostationary Satellite Ocean Color Data to Map the Diurnal Dynamics of Suspended Particulate Matter in Coastal Waters. Remote Sens. Environ. 2013, 133, 225–239. [Google Scholar] [CrossRef]
- Ping, B.; Su, F.; Meng, Y. An improved DINEOF algorithm for filling missing values in spatio-temporal sea surface temperature data. PLoS ONE 2016, 11, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Tandeo, P.; Ailliot, P.; Ruiz, J.; Hannart, A.; Chapron, B.; Cuzol, A.; Monbet, V.; Easton, R.; Fablet, R. Combining Analog Method and Ensemble Data Assimilation: Application to the Lorenz-63 Chaotic System. Mach. Learn. Data Min. Approaches Clim. Sci. 2015, 3–12. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.H.; Im, J.; Ha, H.K.; Choi, J.K.; Ha, S. Machine learning approaches to coastal water quality monitoring using GOCI satellite data. GIScience Remote Sens. 2014. [Google Scholar] [CrossRef]
- Ouala, S.; Herzet, C.; Fablet, R. Sea surface temperature prediction and reconstruction using patch-level neural network representations. arXiv 2018, arXiv:1806.00144. [Google Scholar]
- Liu, X.; Wang, M. Super-Resolution of VIIRS-Measured Ocean Color Products Using Deep Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 114–127. [Google Scholar] [CrossRef]
- Fablet, R.; Drumetz, L.; Rousseau, F. End-to-end learning of energy-based representations for irregularly-sampled signals and images. arXiv 2019, arXiv:1910.00556. [Google Scholar]
- Barth, A.; Alvera-Azcárate, A.; Licer, M.; Beckers, J.M. DINCAE 1.0: A convolutional neural network with error estimates to reconstruct sea surface temperature satellite observations. Geosci. Model Dev. 2020, 13, 1609–1622. [Google Scholar] [CrossRef] [Green Version]
- Alvera-Azcárate, A.; Vanhellemont, Q.; Ruddick, K.; Barth, A.; Beckers, J.M. Analysis of high frequency geostationary ocean colour data using DINEOF. Estuar. Coast. Shelf Sci. 2015. [Google Scholar] [CrossRef] [Green Version]
- Beauchamp, M.; Fablet, R.; Ubelmann, C.; Ballarotta, M.; Chapron, B. Intercomparison of data-driven and learning-based interpolations of along-track nadir and wide-swath swot altimetry observations. Remote Sens. 2020, 12, 3806. [Google Scholar] [CrossRef]
- Tew-Kai, E.; Quilfen, V.; Cachera, M.; Boutet, M. Dynamic coastal-shelf seascapes to support marine policies using operational coastal oceanography: The french example. J. Mar. Sci. Eng. 2020, 8, 585. [Google Scholar] [CrossRef]
- Doray, M.; Petitgas, P.; Romagnan, J.B.; Huret, M.; Duhamel, E.; Dupuy, C.; Spitz, J.; Authier, M.; Sanchez, F.; Berger, L.; et al. The PELGAS survey: Ship-based integrated monitoring of the Bay of Biscay pelagic ecosystem. Prog. Oceanogr. 2018, 166, 15–29. [Google Scholar] [CrossRef] [Green Version]
- Mengual, B.; Le Hir, P.; Cayocca, F.; Garlan, T. Bottom trawling contribution to the spatio-temporal variability of sediment fluxes on the continental shelf of the Bay of Biscay (France). Mar. Geol. 2019, 414, 77–91. [Google Scholar] [CrossRef]
- Mengual, B. Spatio-Temporal Variability of Sediment Fluxes in the Bay of Biscay: Relative Contributions of Climate Forcings and Trawling Activities; Technical Report; Earth Sciences; Universite de Bretagne Occidentale-Brest: Brest, France, 2016. [Google Scholar]
- Mengual, B.; Hir, P.L.; Cayocca, F.; Garlan, T. Modelling fine sediment dynamics: Towards a common erosion law for fine sand, mud and mixtures. Water 2017, 9, 564. [Google Scholar] [CrossRef] [Green Version]
- Gohin, F. Annual cycles of chlorophyll-a, non-algal suspended particulate matter, and turbidity observed from space and in-situ in coastal waters. Ocean. Sci. 2011, 7, 705–732. [Google Scholar] [CrossRef] [Green Version]
- Hoffman, R.N.; Atlas, R. Future observing system simulation experiments. Bull. Am. Meteorol. Soc. 2016, 97, 1601–1616. [Google Scholar] [CrossRef]
- Leidner, S.M.; Annane, B.; McNoldy, B.; Hoffman, R.; Atlas, R. Variational analysis of simulated ocean surface winds from the cyclone Global Navigation Satellite System (CYGNSS) and evaluation using a regional OSSE. J. Atmos. Ocean. Technol. 2018, 35, 1571–1584. [Google Scholar] [CrossRef]
- Halliwell, G.R.; Mehari, M.F.; Le Hénaff, M.; Kourafalou, V.H.; Androulidakis, I.S.; Kang, H.S.; Atlas, R. North Atlantic Ocean OSSE system: Evaluation of operational ocean observing system components and supplemental seasonal observations for potentially improving tropical cyclone prediction in coupled systems. J. Oper. Oceanogr. 2017, 10, 154–175. [Google Scholar] [CrossRef]
- Morel, A.; Bélanger, S. Improved detection of turbid waters from ocean color sensors information. Remote Sens. Environ. 2006, 102, 237–249. [Google Scholar] [CrossRef]
- Cressie, N.A.C.; Wikle, C.K. Statistics for Spatio-Temporal Data; Wiley John Wiley and Sons: Hoboken, NJ, USA, 2011; p. 588. [Google Scholar]
- Høyer, J.L.; She, J. Optimal interpolation of sea surface temperature for the North Sea and Baltic Sea. J. Mar. Syst. 2007. [Google Scholar] [CrossRef]
- Daley, R. Atmospheric data Assimilation. J. Meterological Soc. Jpn. 1997, 75, 319–329. [Google Scholar] [CrossRef] [Green Version]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 2007, 4, 313–332. [Google Scholar] [CrossRef]
- Beckers, J.M.; Rixen, M.; Beckers, J.M.; Rixen, M. EOF Calculations and Data Filling from Incomplete Oceanographic Datasets*. J. Atmos. Ocean. Technol. 2003, 20, 1839–1856. [Google Scholar] [CrossRef]
- Lguensat, R.; Tandeo, P.; Ailliot, P.; Pulido, M.; Fablet, R. The Analog Data Assimilation. Mon. Weather. Rev. 2017. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote. Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Fablet, R.; Amar, M.M.; Febvre, Q.; Beauchamp, M.; Chapron, B. End-To-End Physics-Informed Representation Learning for Satellite Ocean Remote Sensing Data: Applications To Satellite Altimetry and Sea Surface Currents. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 3, 295–302. [Google Scholar] [CrossRef]
- Fablet, R.; Chapron, B.; Drumetz, L.; Memin, E.; Pannekoucke, O.; Rousseau, F. Learning variational data assimilation models and solvers. arXiv 2020, arXiv:2007.12941. [Google Scholar]
- Fablet, R.; Beauchamp, M.; Drumetz, L.; Rousseau, F. Joint Interpolation and Representation Learning for Irregularly Sampled. Front. Appl. Math. Stat. 2021, 7, 1–13. [Google Scholar] [CrossRef]
- Tomas-Burguera, M.; Beguería, S.; Vicente-Serrano, S.; Maneta, M. Optimal Interpolation scheme to generate reference crop evapotranspiration. J. Hydrol. 2018, 560, 202–219. [Google Scholar] [CrossRef]
- Lorenzo, A.T.; Morzfeld, M.; Holmgren, W.F.; Cronin, A.D. Optimal interpolation of satellite and ground data for irradiance nowcasting at city scales. Sol. Energy 2017, 144, 466–474. [Google Scholar] [CrossRef] [Green Version]
- Zhen, Y.; Tandeo, P.; Leroux, S.; Metref, S.; Penduff, T.; Le Sommer, J. An adaptive optimal interpolation based on analog forecasting: Application to ssh in the gulf of Mexico. J. Atmos. Ocean. Technol. 2020, 37, 1697–1711. [Google Scholar] [CrossRef]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D.D. A Survey of Transfer Learning; Springer International Publishing: London, UK, 2016; Volume 3. [Google Scholar] [CrossRef] [Green Version]
- Orenstein, E.C.; Beijbom, O. Transfer learning and deep feature extraction for planktonic image data sets. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision, WACV 2017, Santa Rosa, CA, USA, 24–31 March 2017; pp. 1082–1088. [Google Scholar] [CrossRef]
- Sidén, P.; Lindsten, F. Deep Gaussian markov random fields. In Proceedings of the 37th International Conference on Machine Learning, ICML 2020, Virtual, 13–18 July 2020; PartF16814. pp. 8875–8885. [Google Scholar]
- Barth, A.; Azcárate, A.A.; Joassin, P.; Beckers, J.M.; Troupin, C. Statistical Analysis of Biological data and Times-Series Introduction to Optimal Interpolation and Variational Analysis Theory of optimal interpolation and variational analysis Contents. In Statistical Analysis of Biological Data and Times-Series; GeoHydrodynamics and Environment Research; University of Liege: Liege, Belgium, 2008; Chapter 1. [Google Scholar]
- Li, Y.; Allen-Zhu, Z. What can resnet learn efficiently, going beyond kernels? arXiv 2019, arXiv:1905.10337. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Unit | Data Domain | OI | DinEOF | AnDA | AE-4DVarNet | GE-4DVarNet |
|---|---|---|---|---|---|---|---|
| RMSE | [g/L] | All | 0.176 | 0.167 | 0.162 | 0.142 | 0.104 |
| R-score | % | All | 90.4 | 91.3 | 91.9 | 93.7 | 96.6 |
| RMSE | [g/L] | Observed | 0.056 | 0.038 | 0.049 | 0.095 | 0.094 |
| R-score | % | Observed | 98.5 | 99.4 | 99.3 | 92.8 | 96.4 |
| RMSE | [g/L] | Unobserved | 0.187 | 0.177 | 0.171 | 0.151 | 0.106 |
| R-score | % | Unobserved | 89.5 | 90.5 | 91.2 | 93.2 | 96.6 |
| Global | Unit | OI | DinEOF | AnDA | AE-4DVarNet | GE-4DVarNet |
|---|---|---|---|---|---|---|
| RMSE | [g/L]/m | 0.110 | 0.093 | 0.079 | 0.084 | 0.073 |
| R-score | % | 16.0 | 40.6 | 57.1 | 51.1 | 63.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vient, J.-M.; Jourdin, F.; Fablet, R.; Mengual, B.; Lafosse, L.; Delacourt, C. Data-Driven Interpolation of Sea Surface Suspended Concentrations Derived from Ocean Colour Remote Sensing Data. Remote Sens. 2021, 13, 3537. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173537
Vient J-M, Jourdin F, Fablet R, Mengual B, Lafosse L, Delacourt C. Data-Driven Interpolation of Sea Surface Suspended Concentrations Derived from Ocean Colour Remote Sensing Data. Remote Sensing. 2021; 13(17):3537. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173537
Chicago/Turabian StyleVient, Jean-Marie, Frederic Jourdin, Ronan Fablet, Baptiste Mengual, Ludivine Lafosse, and Christophe Delacourt. 2021. "Data-Driven Interpolation of Sea Surface Suspended Concentrations Derived from Ocean Colour Remote Sensing Data" Remote Sensing 13, no. 17: 3537. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173537