
Micro-Motion Parameter Extraction for Ballistic Missile with Wideband Radar Using Improved Ensemble EMD Method


Abstract
:1. Introduction
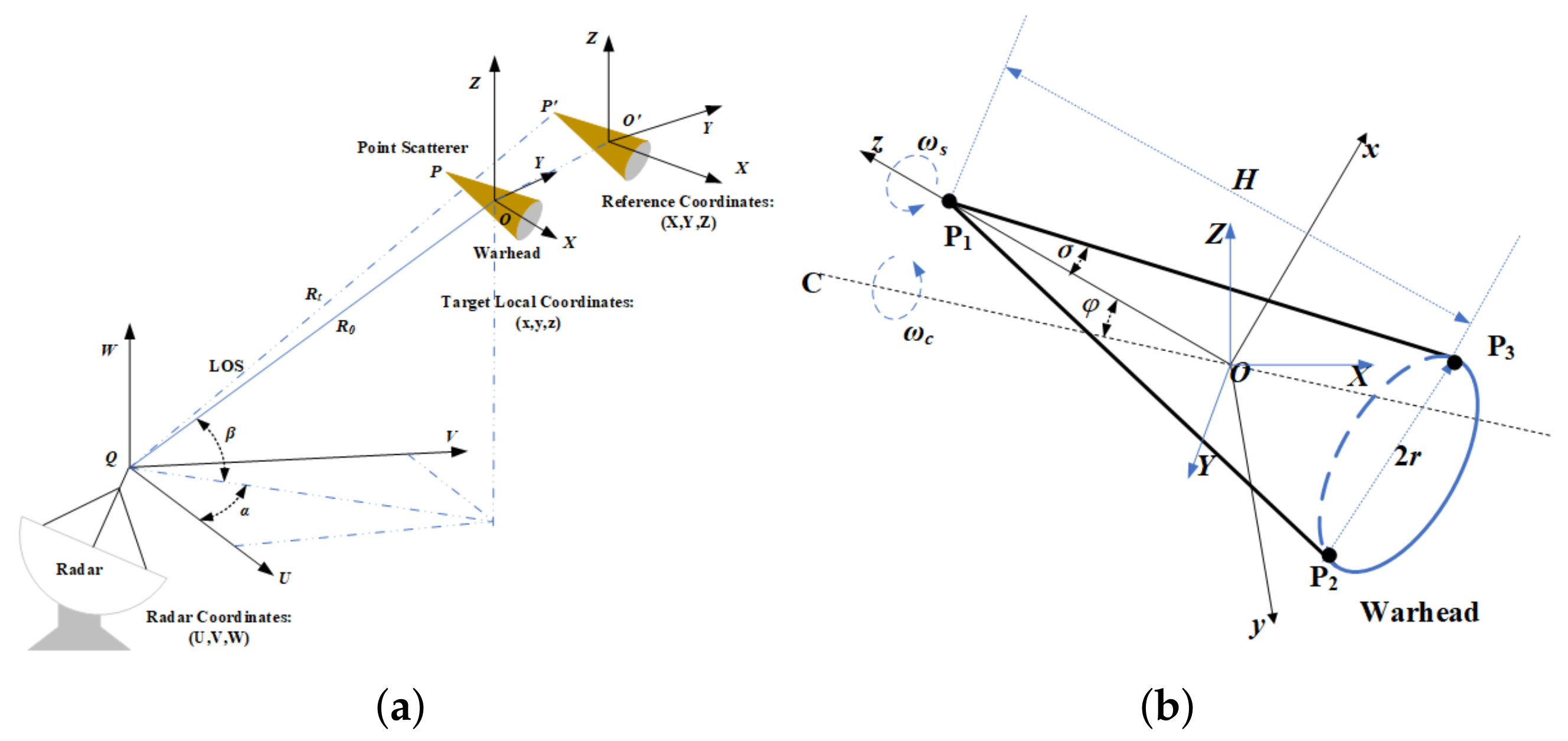
2. Geometry and Signal Model
2.1. Warhead Motion
2.2. Radar Echoes
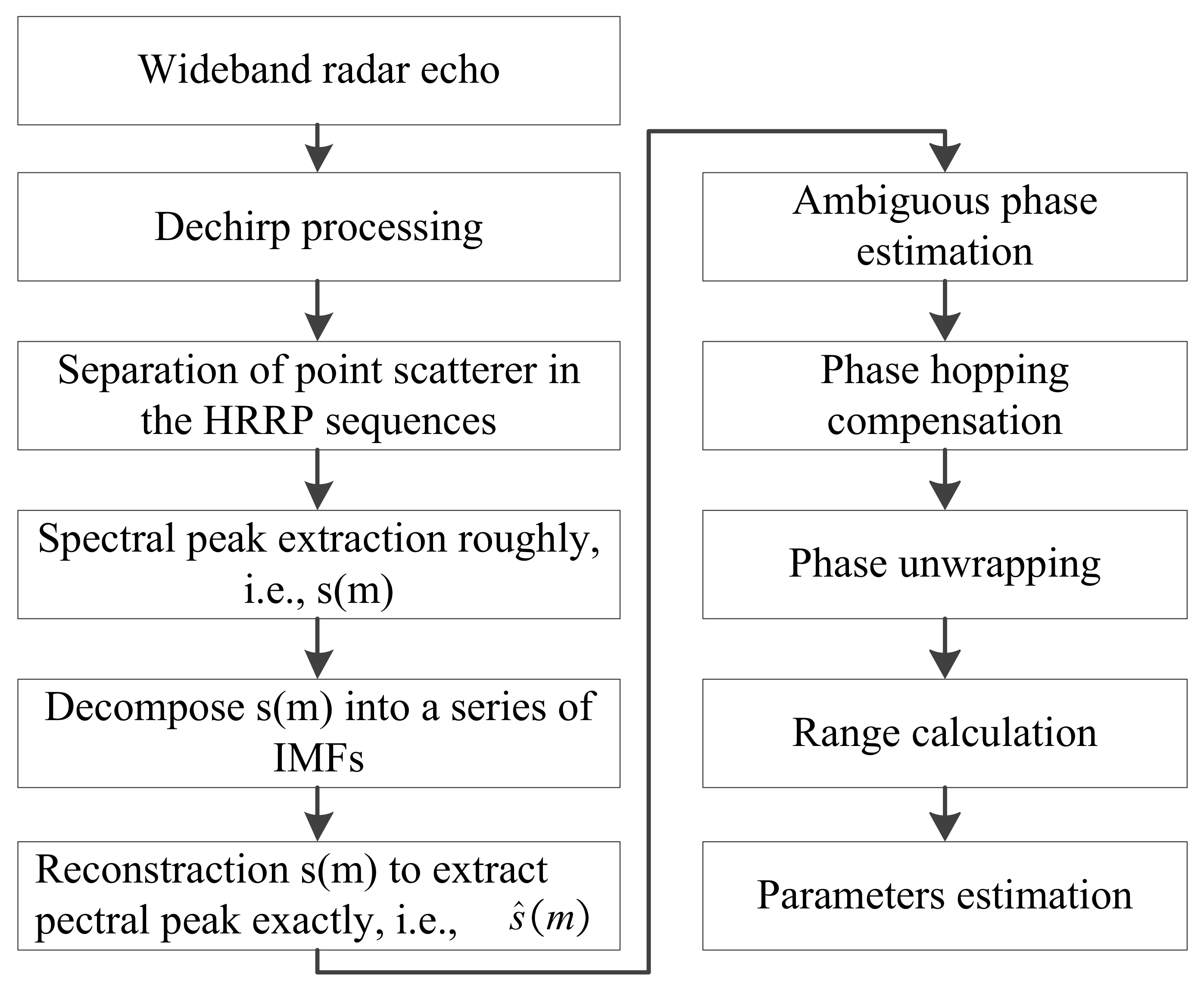
3. Micro-Motion Parameter Estimation
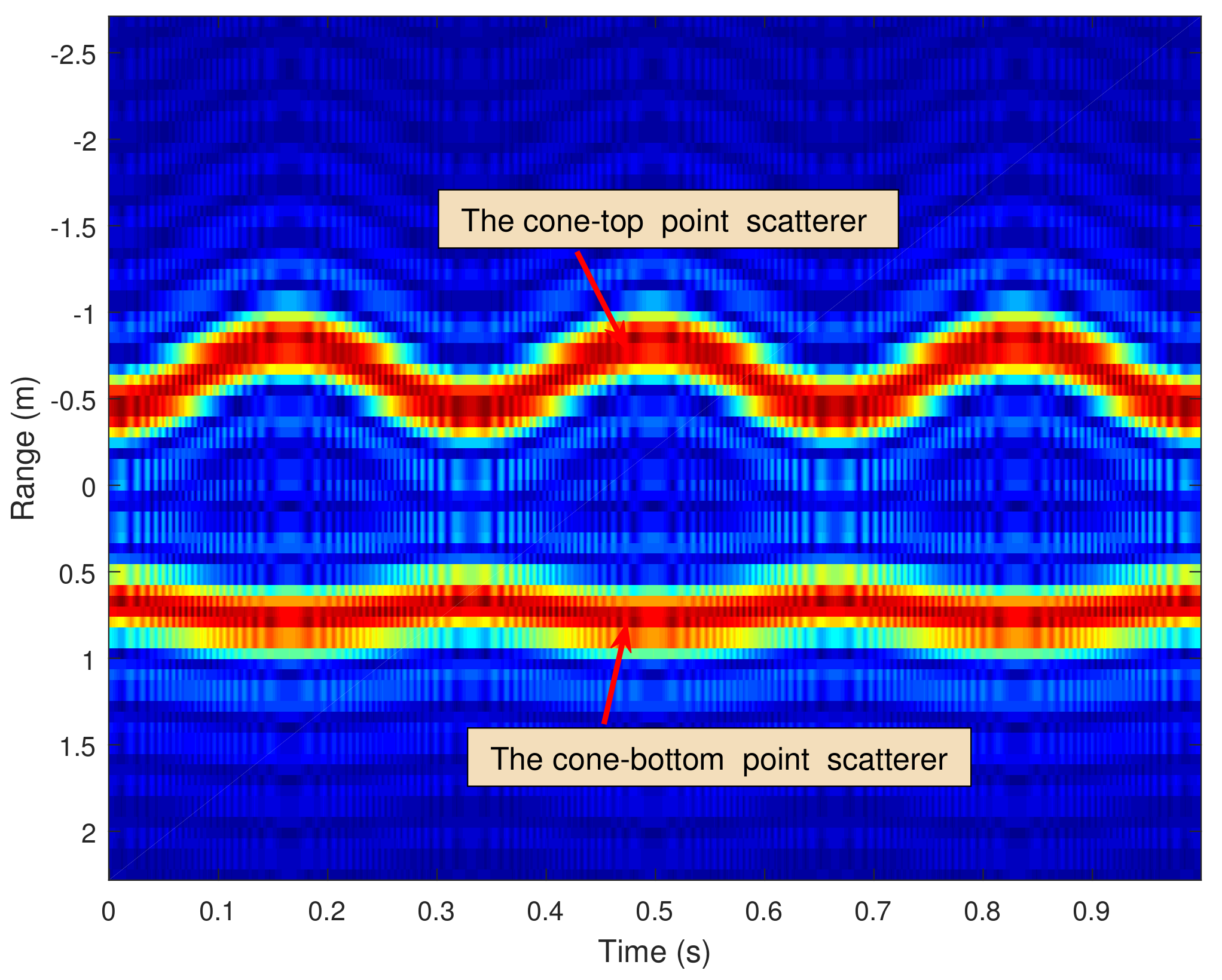
3.1. Scattering Point Separation
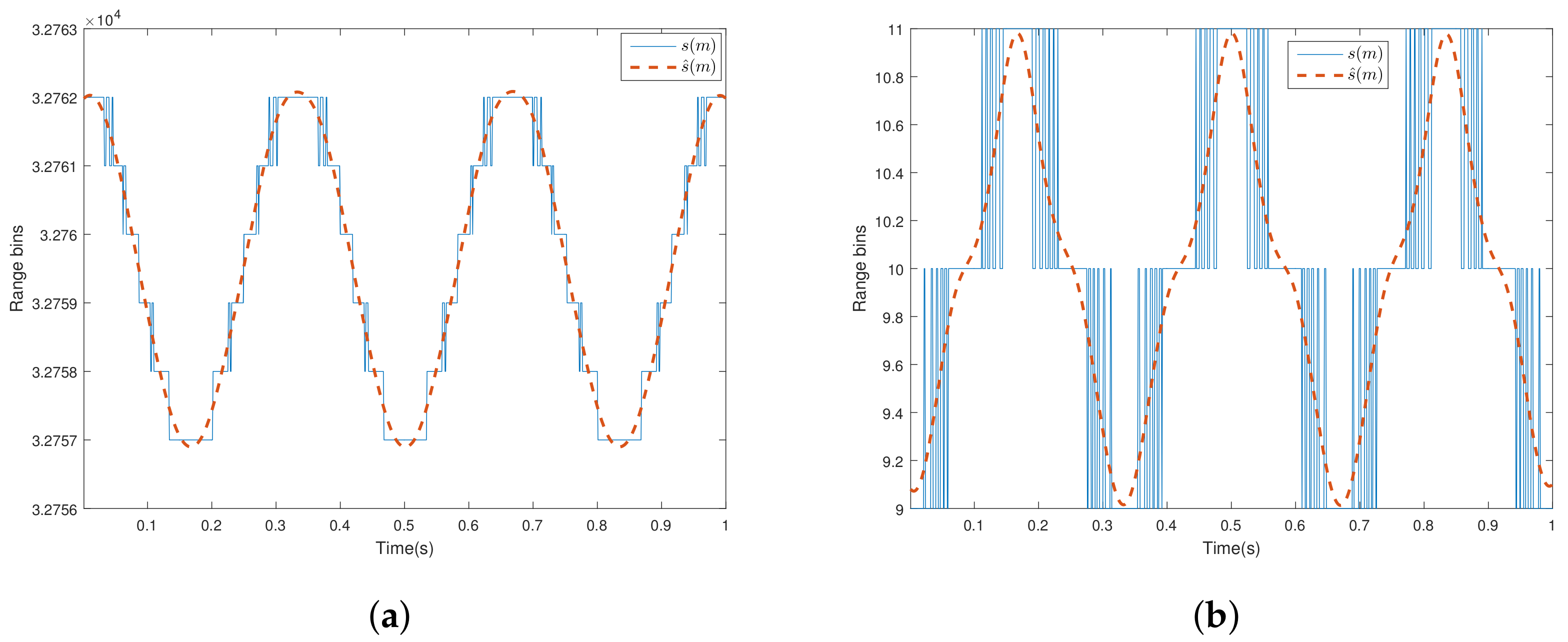
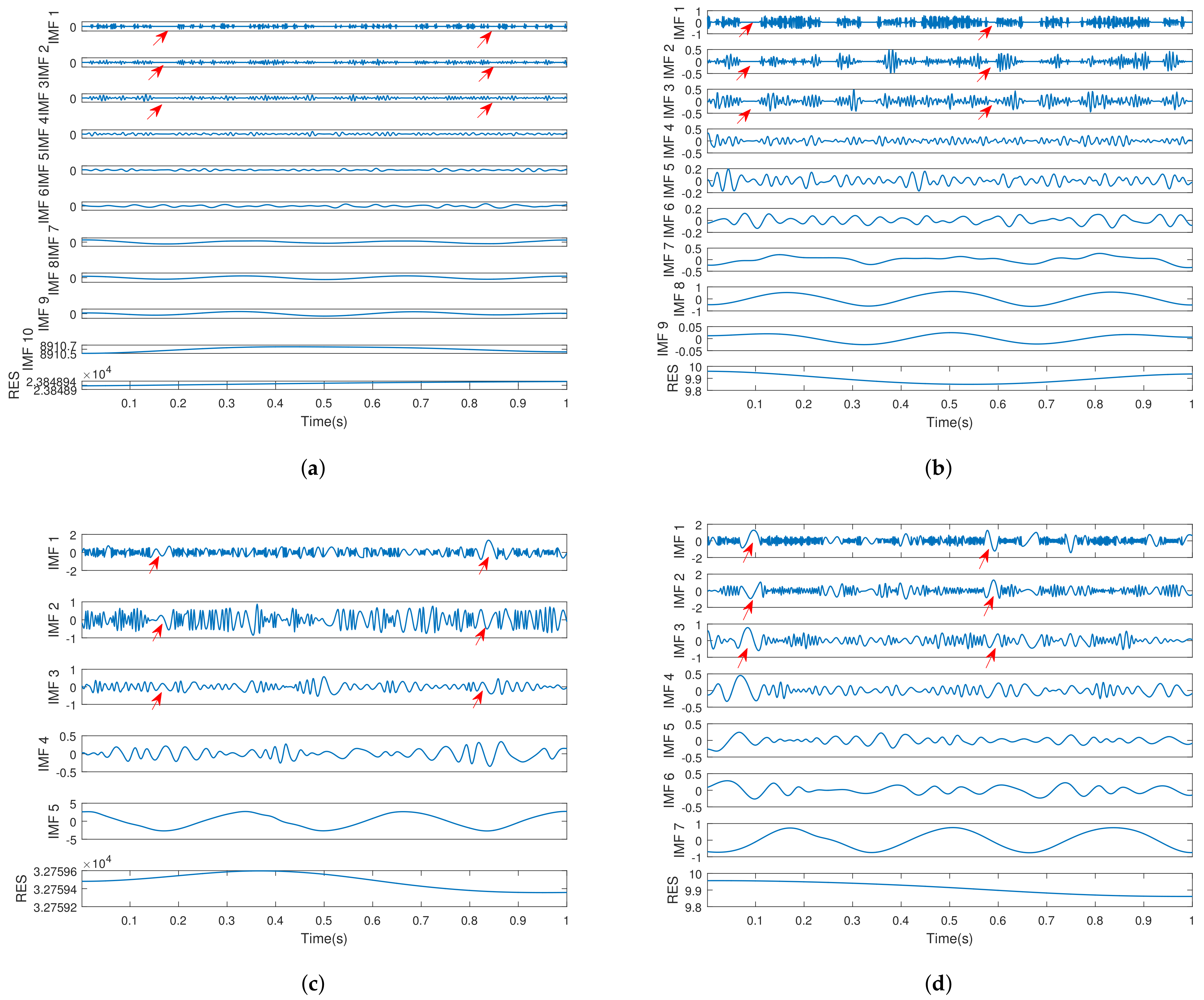
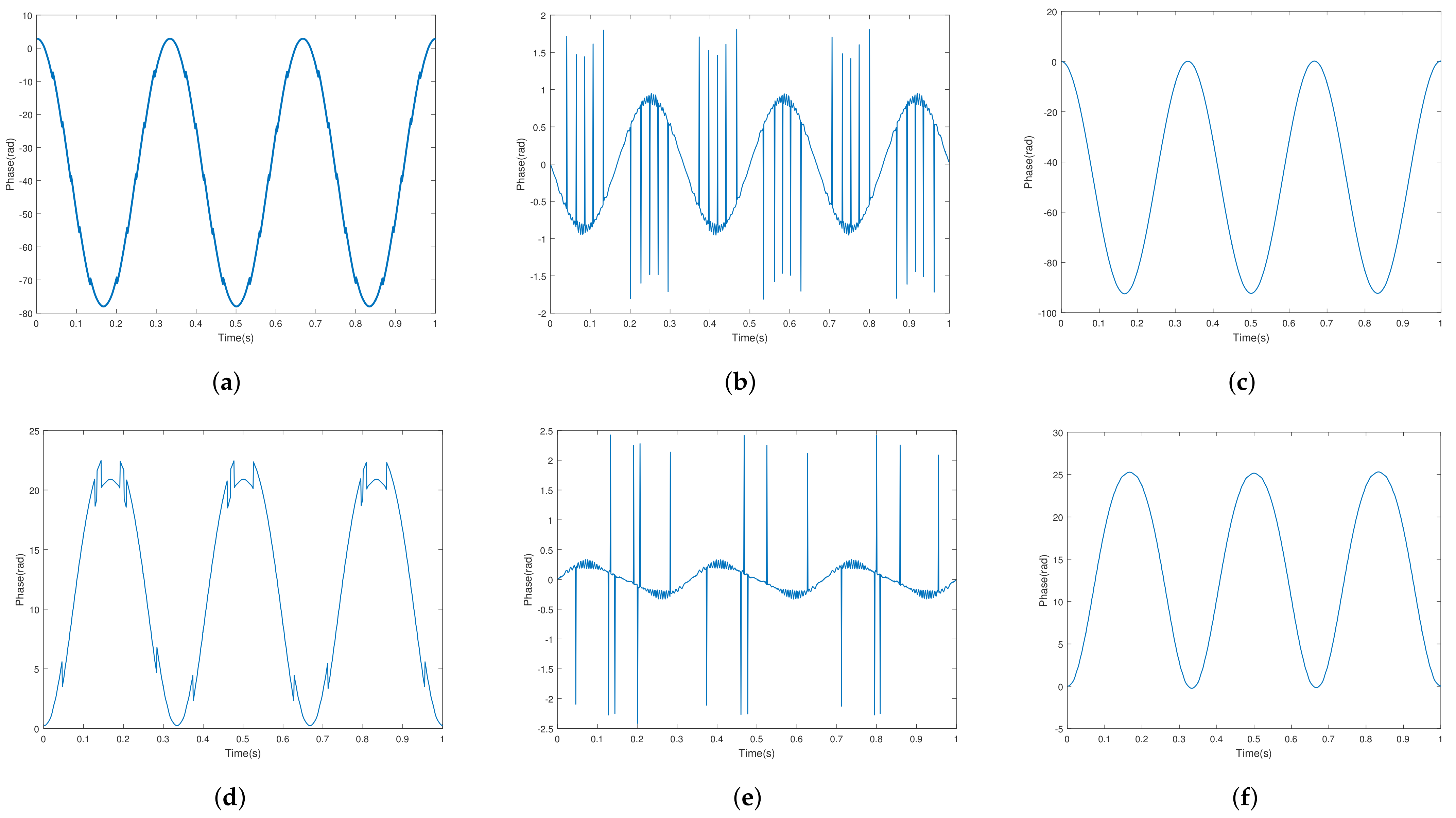
3.2. Micro-Curve Extraction
3.3. Micro-Motion Parameter Estimation
3.3.1. Precession Frequency Estimation
3.3.2. Precession Angle Estimation
3.3.3. Half-Cone Angle and Length of Busbar Estimation
3.3.4. Cone Height and Base Radius Estimation
4. Simulations and Discussion
4.1. Scattering Point Separation
4.2. Micro-Curve Extraction
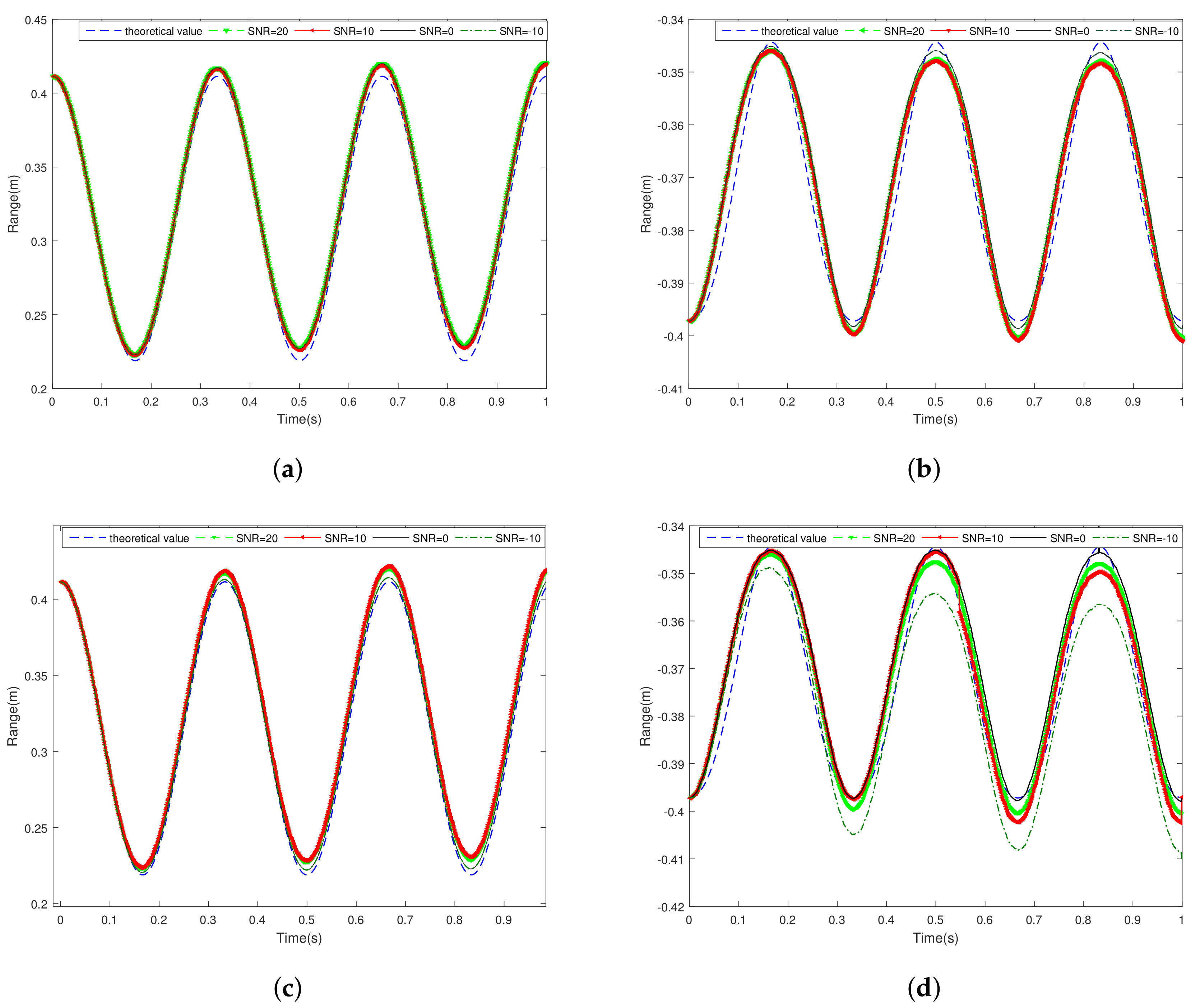
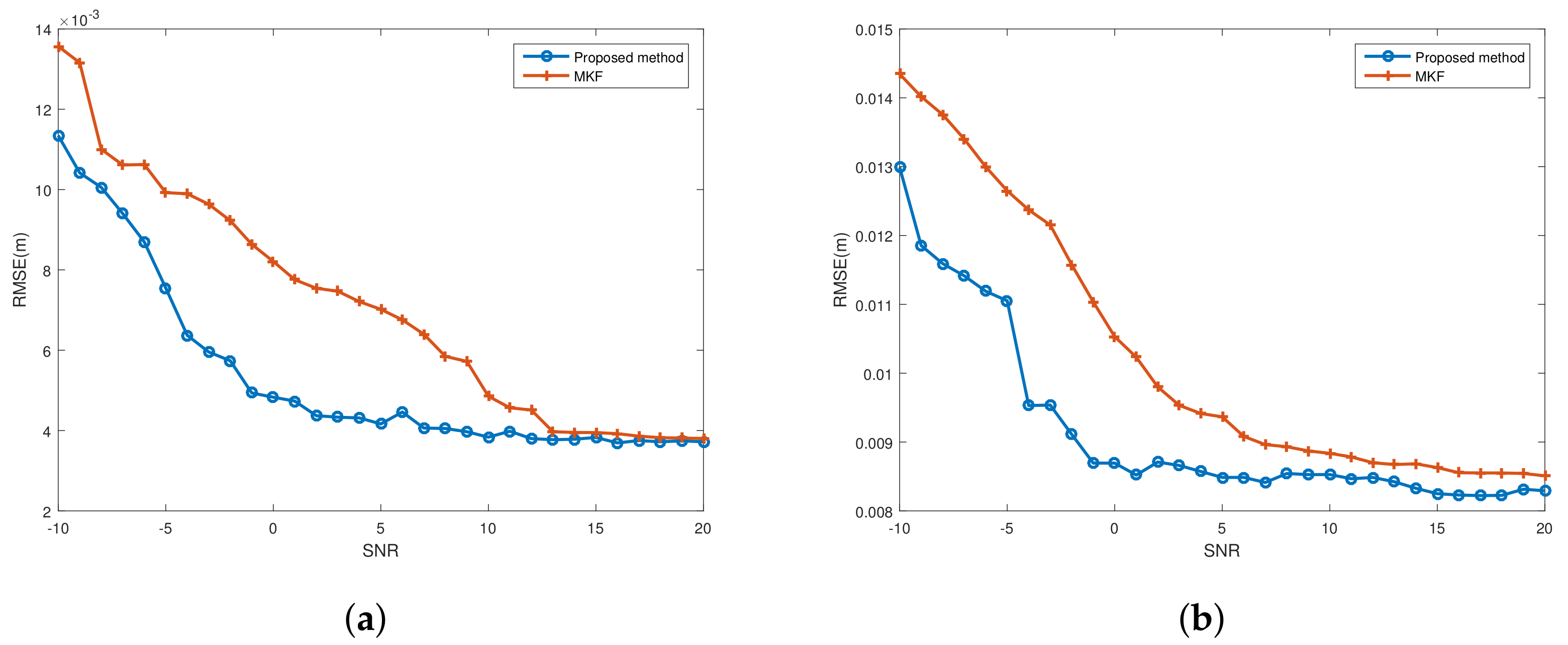
4.3. Parameters Estimation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhuo, Z.Y.; Zhou, Y.; Du, L.; Ren, K.; Li, Y. A Noise Robust Micro-Range Estimation Method for Precession Cone-Shaped Targets. Remote Sens. 2021, 13, 1820. [Google Scholar] [CrossRef]
- Choi, O.; Park, S.H.; Kim, M.; Kang, K.B.; Kim, K.T. Efficient Discrimination of Ballistic Targets with Micromotions. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1243–1261. [Google Scholar] [CrossRef]
- Li, W.J.; Fan, H.Y.; Ren, L.X.; Mao, E.K.; Liu, Q.H. A High-Accuracy Phase-Derived Velocity Measurement Method for High-Speed Spatial Targets Based on Stepped-Frequency Chirp Signals. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1999–2014. [Google Scholar] [CrossRef]
- Ren, K.; Du, L.; Lu, X.F.; Zhuo, Z.Y.; Li, L. Instantaneous Frequency Estimation Based on Modified Kalman Filter for Cone-Shaped Target. Remote Sens. 2020, 12, 2766. [Google Scholar] [CrossRef]
- Zeng, Z.X.; Amin, M.G.; Shan, T. Arm Motion Classification Using Time-Series Analysis of the Spectrogram Frequency Envelopes. Remote Sens. 2020, 12, 454. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Li, X.; Jing, X. A Mutiscale Residual Attention Network for Multitask Learning of Human Activity Using Radar Micro-Doppler Signatures. Remote Sens. 2019, 11, 2584. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.X.; Zhu, D.K.; Li, X.; Zhuang, Z.W. Micromotion Characteristic Acquisition Based on Wideband Radar Phase. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3650–3657. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Liu, L.H.; Zhuang, W.; Hu, W.D. Precession Period Extraction of Ballistic Missile Based on Radar Measurement. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006. [Google Scholar]
- Xiong, X.Y.; Liu, H.; Deng, Z.M.; Fu, M.Z.; Qi, W.; Zhang, Y.J. Micro-Doppler Ambiguity Resolution with Variable Shrinkage Ratio Based on Time-Delayed Cross Correlation Processing for Wideband Radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1906–1917. [Google Scholar] [CrossRef]
- Yang, Q.; Deng, B.; Wang, H.Q.; Qin, Y.L.; Ding, W.X. Doppler aliasing free micro-motion parameter estimation algorithm based on the spliced time-frequency image and inverse Radon transform. In Proceedings of the International Conference on Information and Communications Technologies (ICT), Nanjing, China, 15–17 May 2014; pp. 1–6. [Google Scholar]
- Tan, R.; Lim, H.S.; Smits, A.B.; Harmanny, R.I.A.; Cifola, L. Improved micro-Doppler features extraction using Smoothed-Pseudo Wigner-Ville distribution. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016. [Google Scholar]
- Chen, H.Y.; Liu, Y.X.; Liang, W.D. A New Approach for Synthesizing Range Profile of Moving Target via Stepped-Frequency Waveforms. IEEE Geosci. Remote Sens. Lett. 2006, 3, 406–409. [Google Scholar] [CrossRef]
- Yang, T.; Wang, S.R.; Li, M.M.; Chen, R.S. Electromagnetic Analysis and Micro-motion Parameters Extraction of Moving Targets. In Proceedings of the 2020 Cross Strait Radio Science & Wireless Technology Conference (CSRSWTC), Fuzhou, China, 13–16 December 2020. [Google Scholar]
- He, S.S.; Zhou, J.X.; Zhou, J.X.; Fu, Q. Using HRRP Sequence to Estimate the Precession Parameters of Mid-course Target. Signal Process. 2009, 25, 925–929. [Google Scholar]
- Li, X.C.; Li, B.; Hu, J.; Song, Y. Review for Feature Extraction of Ballistic Targets Based on HRRP. Mod. Def. Technol. 2015, 43, 142–150. [Google Scholar]
- Zhu, D.K.; Liu, Y.X.; Huo, K.; Li, X. A Novel High-Precision Phase-Derived-Range Method for Direct Sampling LFM Radar. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1131–1141. [Google Scholar] [CrossRef]
- Mehrholz, D. Radar Techniques for the Characterization of Meter-Sized Object in Space. Adv. Space Res. 2001, 28, 1259–1268. [Google Scholar] [CrossRef]
- Chen, V.C.; Ling, H. Time-Frequency Transforms for Radar Image and Signal Analysis; Artech House: Boston, MA, USA, 2002; pp. 174–192. [Google Scholar]
- Xiong, X.Y.; Deng, Z.M.; Qi, W.; Ou, H.; Cui, Z.J. A Novel High-Precision Range Estimation Method Based on Phase of Wideband Radar Echo. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3392–3403. [Google Scholar] [CrossRef]
- Camp, W.W.; Mayhan, J.T.; O’Donnell, R.M. Wideband radar for ballistic missile defense and Range-Doppler imaging for satellites. Linc. Lab. J. 2000, 12, 267–280. [Google Scholar]
- Xu, X.G.; Feng, C.Q.; He, S.S. A Method for the Micro-Motion Signal Separation and Micro-Doppler Extraction for the Space Precession Target. IEEE Access 2020, 8, 130392–130404. [Google Scholar] [CrossRef]
- Jin, J.W.; Ruan, H.L.; Sun, B. Micro-Doppler Period Estimation of Ballistic Targets Based on Circular Average Magnitude Difference Coefficients. In Proceedings of the 2020 International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Xi’an, China, 14–16 August 2020. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Math. Phys. Eng. Sci. 1988, 454, 903–995. [Google Scholar] [CrossRef]
- Oh, B.S.; Guo, X.; Wan, F.Y.; Toh, K.A.; Lin, Z.P. Micro-Doppler Mini-UAV Classification Using Empirical-Mode Decomposition Features. IEEE Trans. Geosci. Remote Sens. Lett. 2018, 15, 227–231. [Google Scholar] [CrossRef]
- Li, F.; Xiong, J.J.; Lan, X.H.; Bi, H.K.; Chen, X. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition. J. Syst. Eng. Electron. 2021, 32, 103–117. [Google Scholar]
- Huang, W.W.; Cai, N.; Xie, W.; Ye, Q.; Yang, Z.J. ECG Baseline Wander Correction Based on Ensemble Empirical Mode Decomposition with Complementary Adaptive Noise. J. Med. Imaging Health Inform. 2015, 5, 1796–1799. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. In Proceedings of the IEEE-EURASIP workshop on Nonlinear Signal and Image Processing NSIP-03, Grado, Italy, 8–11 June 2003. [Google Scholar]
- Gao, H.W.; Xie, L.G.; Wen, S.L.; Kuang, Y. Micro-Doppler signature extraction from ballistic target with micro-motion. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1969–1981. [Google Scholar] [CrossRef]
- Bai, X.; Zheng, B. Imaging of rotation-symmetric space targets based on electromagnetic modeling. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1680–1689. [Google Scholar]
- Li, X.L.; Cui, G.L.; Kong, L.J.; Yi, W. Fast non-searching method for maneuvering target detection and motion parameters estimation. IEEE Trans. Signal Process. 2016, 64, 2232–2244. [Google Scholar] [CrossRef]
- Fried, D.L. Least-Square Fitting a Wave-Front Distortion Estimate to an Array of Phase-Difference Measurements. J. Opt. Soc. Am. 1977, 67, 370–375. [Google Scholar] [CrossRef]
- Wei, J.Q.; Zhang, L.; Liu, H.W.; Zhou, Y.J. Micro-motion and gemetric parameters estimation of wide-band radar cone-shaped targets based on phase-derived range. J. Electron. Inf. Technol. 2018, 40, 2227–2234. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| warhead | cone height H | 0.96 m |
| distance between the mass center and the cone top h | 0.64 m | |
| base radius of cone r | 0.25 m | |
| spin frequency | 4 Hz | |
| conic rotation frequency | 2 Hz | |
| precession angle | ||
| radar | carrier Frequency | 10 GHz |
| bandwidth B | 2 GHz | |
| pulse width | 10 us | |
| pulse repetition period | 1 kHz | |
| dwell time T | 1 s |
| SNR (dB) | Methods | P | s | H | r | ||
|---|---|---|---|---|---|---|---|
| 30 | EEMDCAN | 0 | 0.88 | 0.85 | 1.69 | 1.34 | 0.79 |
| EMD | 0 | 2.63 | 3.46 | 2.67 | 2.36 | 2.80 | |
| 25 | EEMDCAN | 0 | 0.90 | 0.86 | 1.69 | 1.75 | 0.84 |
| EMD | 0 | 2.65 | 3.38 | 2.80 | 2.80 | 3.15 | |
| 20 | EEMDCAN | 0 | 0.89 | 0.83 | 1.67 | 1.72 | 0.83 |
| EMD | 0 | 2.64 | 3.71 | 3.74 | 3.18 | 3.23 | |
| 15 | EEMDCAN | 0 | 0.90 | 0.88 | 0.17 | 1.74 | 0.81 |
| EMD | 0 | 5.90 | 5.32 | 3.91 | 4.04 | 3.68 | |
| 10 | EEMDCAN | 0 | 0.91 | 0.79 | 1.64 | 1.34 | 0.84 |
| EMD | 0 | 7.50 | 5.98 | 3.09 | 4.31 | 3.76 | |
| 5 | EEMDCAN | 0 | 1.15 | 3.78 | 0.10 | 0.16 | 3.12 |
| EMD | 0 | 8.23 | 5.87 | 5.45 | 6.45 | 4.84 | |
| 0 | EEMDCAN | 0 | 1.41 | 5.40 | 2.55 | 2.94 | 1.54 |
| EMD | 0 | 10.65 | 12.34 | 9.91 | 9.41 | 11.34 | |
| −5 | EEMDCAN | 0 | 2.81 | 30.76 | 10.62 | 12.76 | 15.39 |
| EMD | 0 | 11.20 | 40.35 | 13.35 | 16.13 | 16.19 | |
| −10 | EEMDCAN | 0 | 2.21 | 33.56 | 8.01 | 10.29 | 21.15 |
| EMD | 0 | 11.34 | 42.46 | 23.28 | 21.11 | 24.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, N.; Hu, J.; Xu, S.; Wu, W.; Zhang, Y.; Chen, Z. Micro-Motion Parameter Extraction for Ballistic Missile with Wideband Radar Using Improved Ensemble EMD Method. Remote Sens. 2021, 13, 3545. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173545
Zhu N, Hu J, Xu S, Wu W, Zhang Y, Chen Z. Micro-Motion Parameter Extraction for Ballistic Missile with Wideband Radar Using Improved Ensemble EMD Method. Remote Sensing. 2021; 13(17):3545. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173545
Chicago/Turabian StyleZhu, Nannan, Jun Hu, Shiyou Xu, Wenzhen Wu, Yunfan Zhang, and Zengping Chen. 2021. "Micro-Motion Parameter Extraction for Ballistic Missile with Wideband Radar Using Improved Ensemble EMD Method" Remote Sensing 13, no. 17: 3545. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173545