
The Potential of Multispectral Imagery and 3D Point Clouds from Unoccupied Aerial Systems (UAS) for Monitoring Forest Structure and the Impacts of Wildfire in Mediterranean-Climate Forests

 ,
,
Abstract
:
1. Introduction
- Evaluate the accuracy, as compared with ALS, of multispectral UAS-SfM in estimating ground elevation, a fundamental component of estimating accurate forest heights.
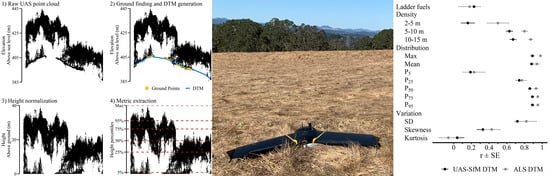
- Determine the ability, as compared with ALS, of UAS-SfM to measure different metrics of canopy structure.
- Demonstrate the utility of multispectral UAS-SfM in assessing the impact of wildfire on changes in photosynthetic productivity (greenness) and canopy height relative to ALS baseline conditions.
2. Materials and Methods
2.1. Study Site
2.2. Data Sources
2.2.1. Unoccupied Aerial System (UAS) Structure from Motion (SfM) Multispectral Data Collection and Processing
2.2.2. Airborne Laser Scanner (ALS) Data
2.2.3. Vegetation Distribution Data
2.2.4. 2017 Tubbs Fire Burn Severity Data
2.3. Data Analysis
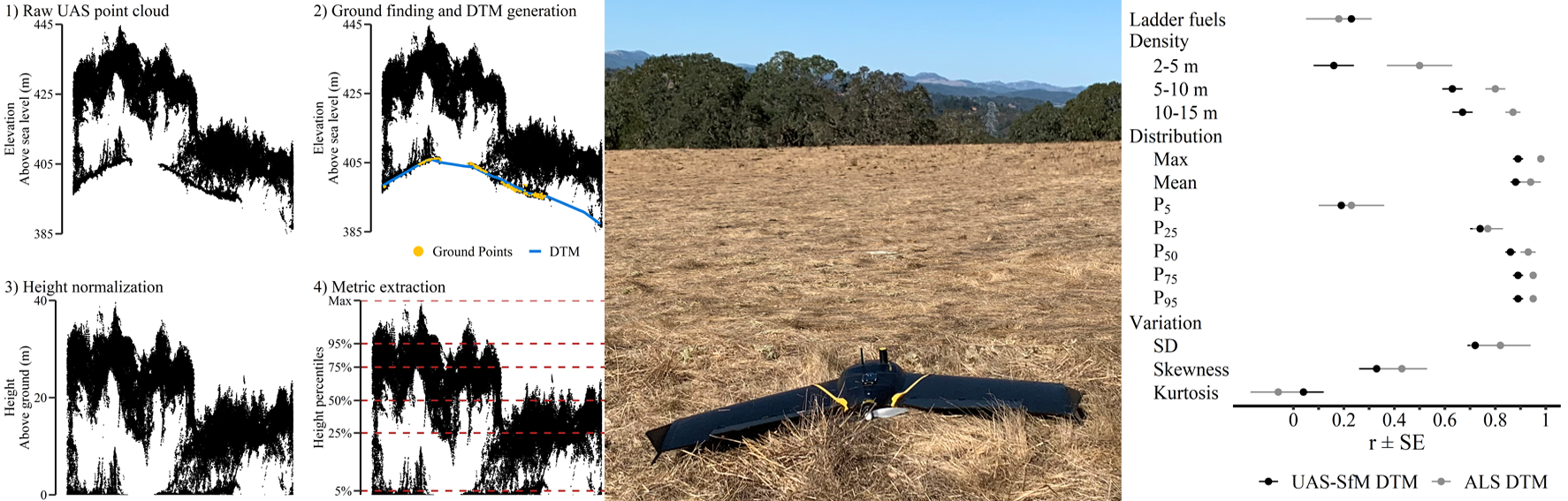
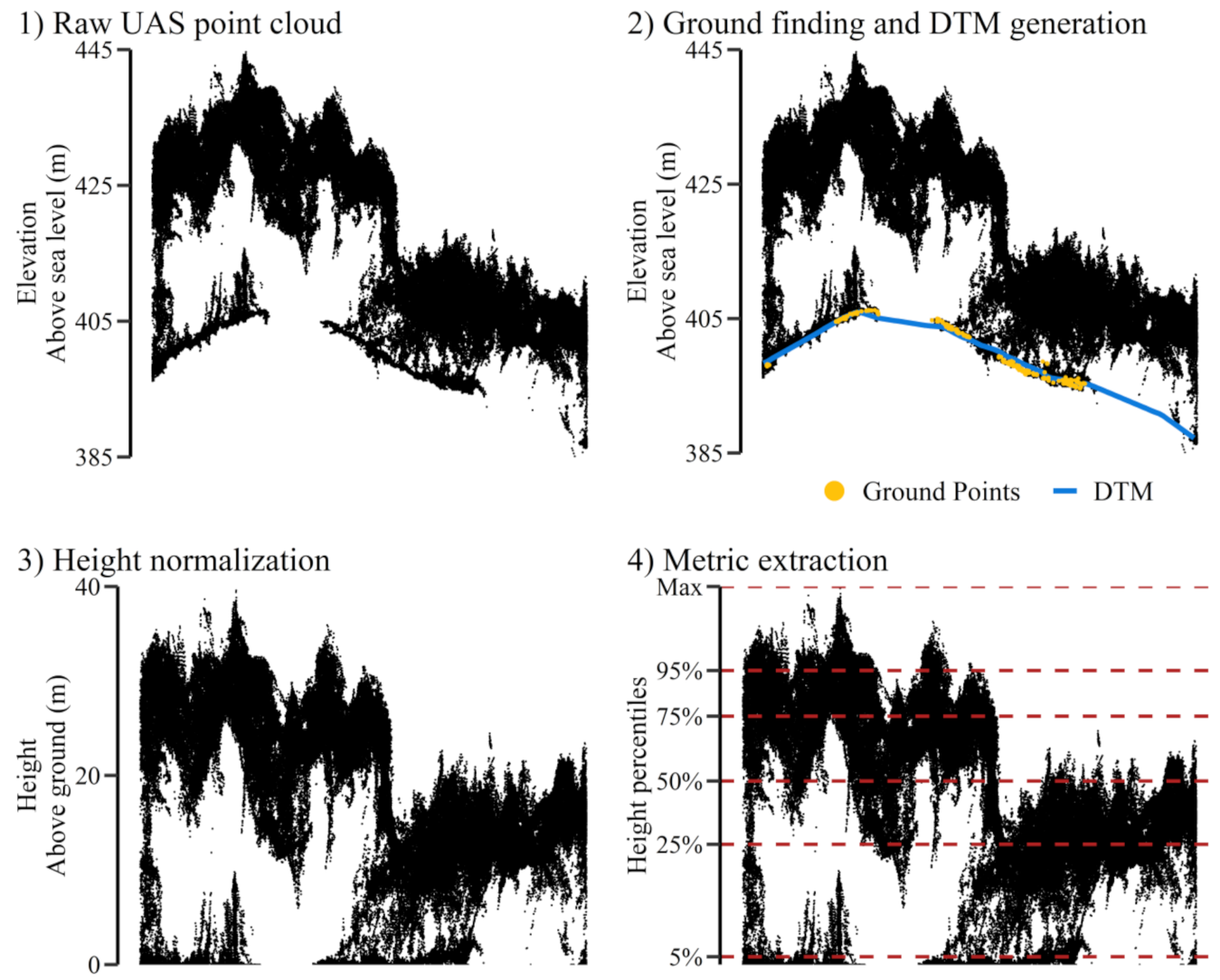
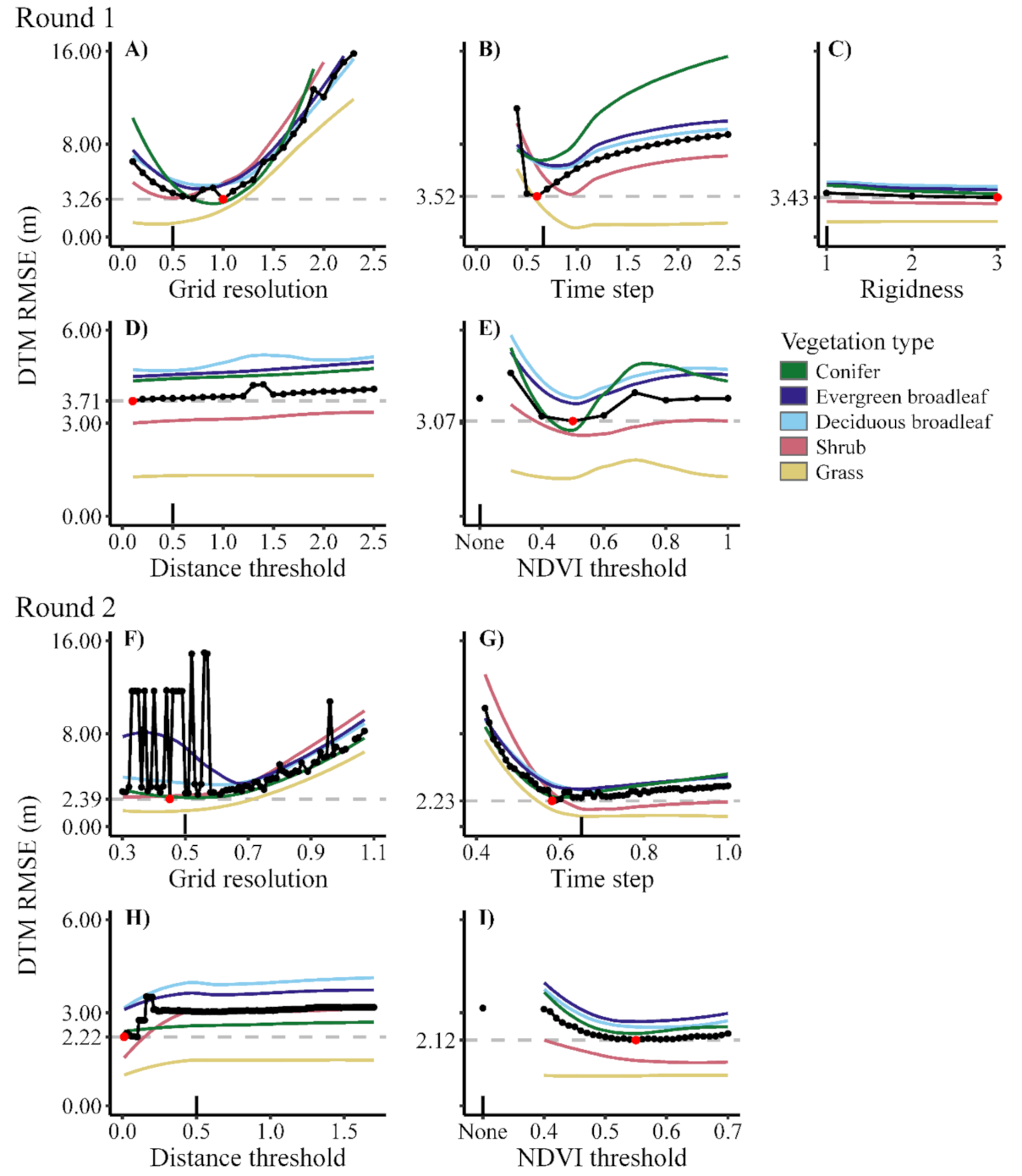
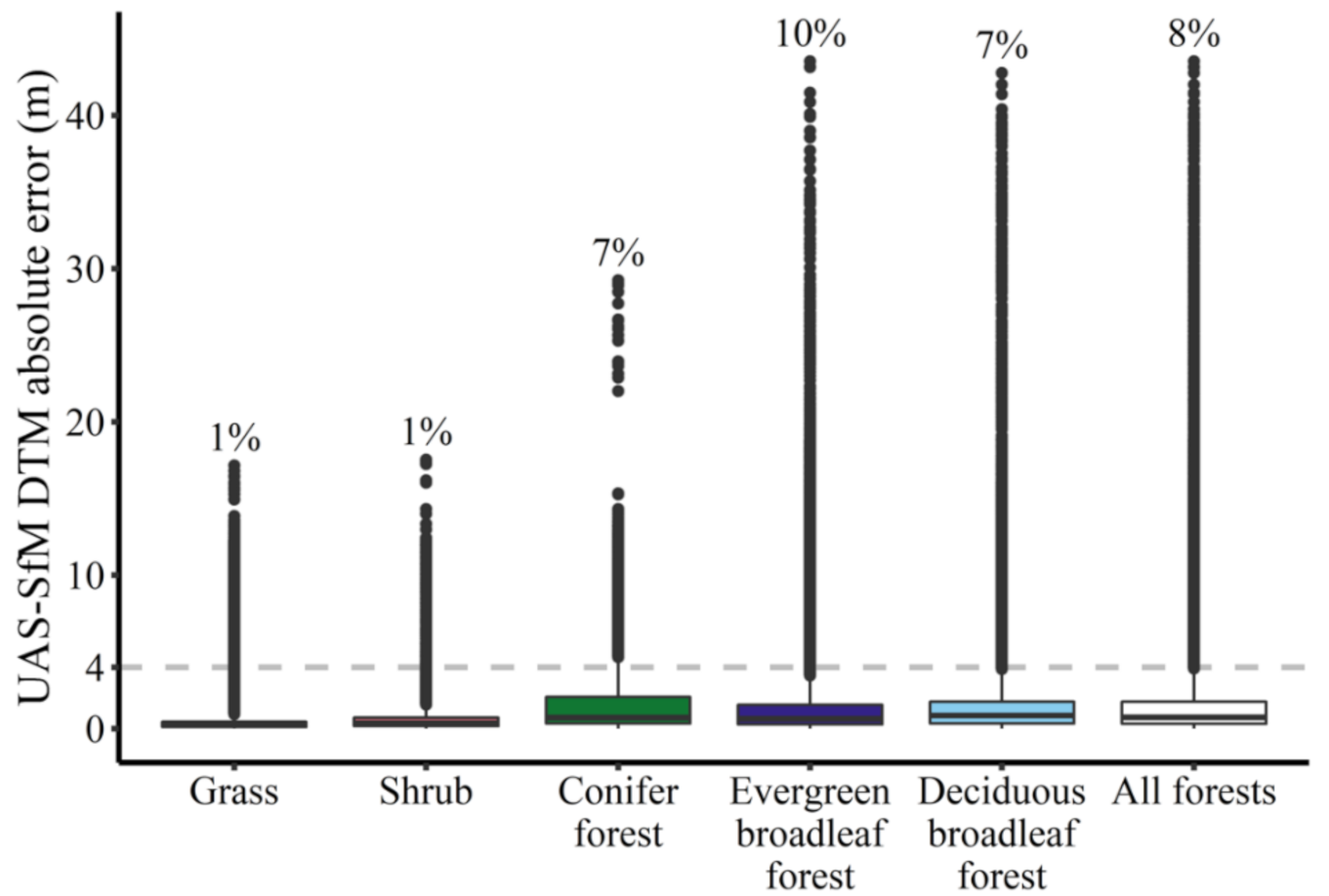
2.3.1. Digital Terrain Model (DTM) Generation Capability Analysis
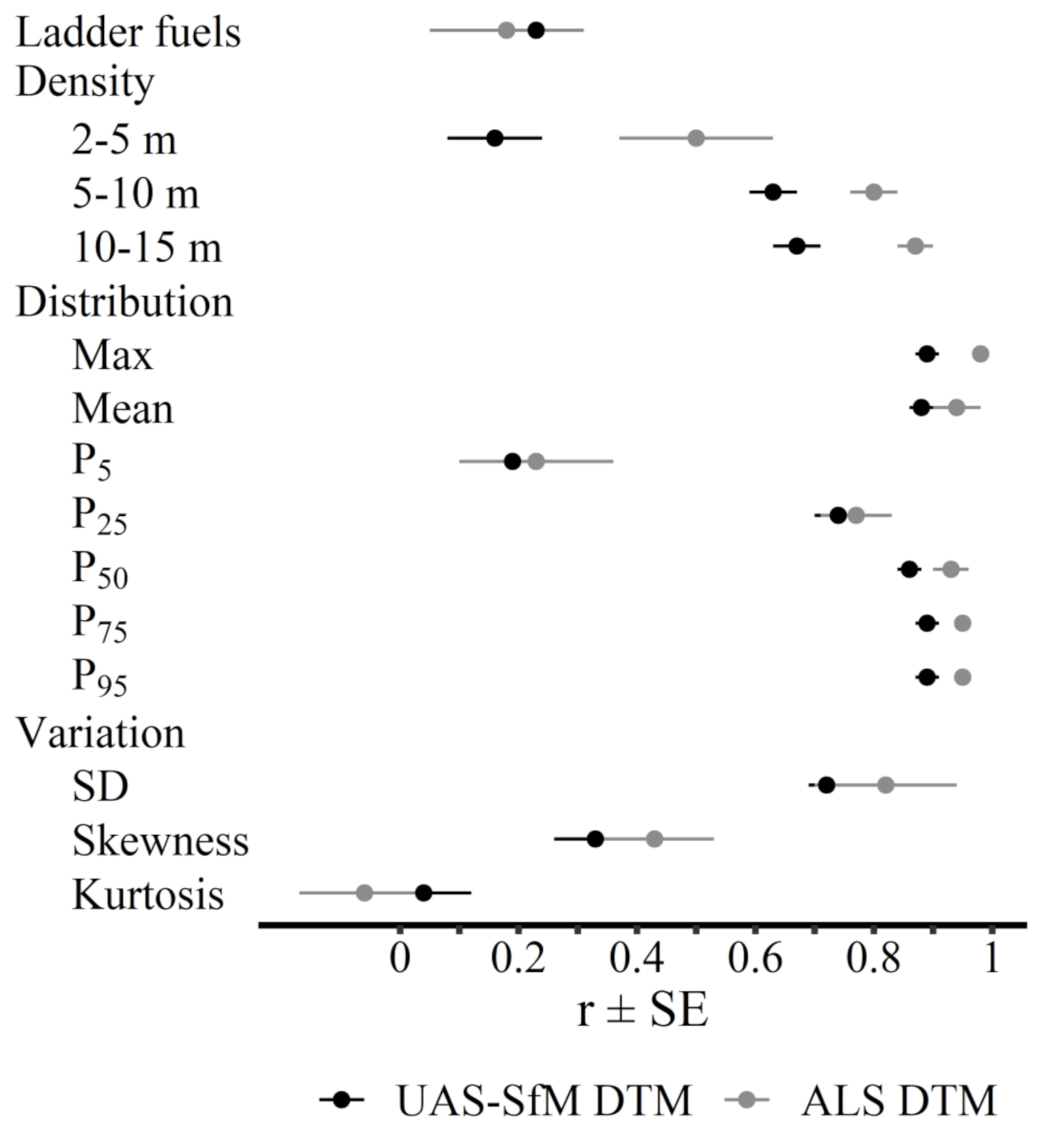
2.3.2. Comparison of Forest Structure from UAS-SfM and ALS Point Clouds
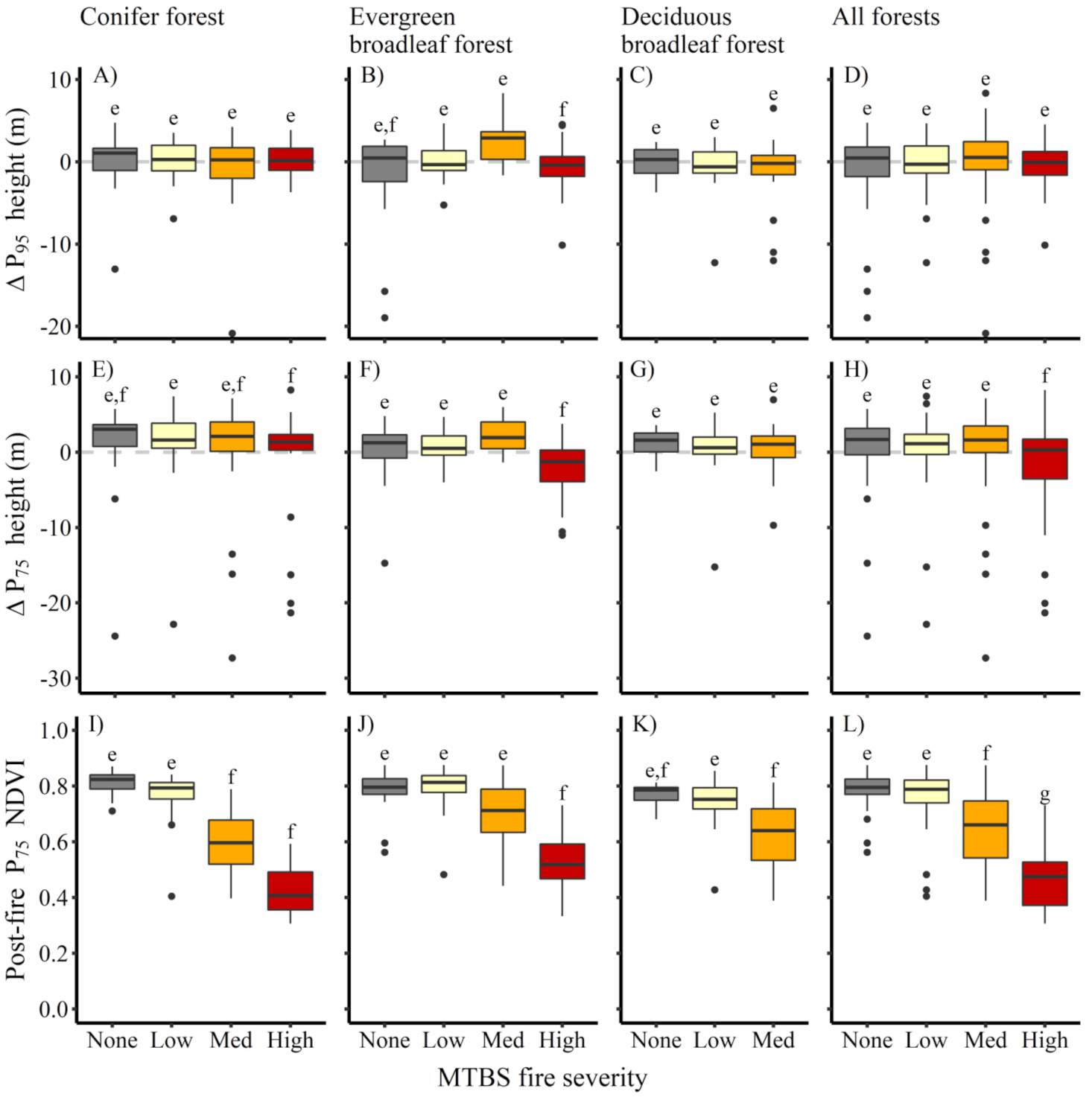
2.3.3. Utility of UAS-SfM for Detecting Post-Fire Forest Change
3. Results
3.1. DTM and CHM Generation Capability Comparisons
3.2. Comparison of Forest Structure from UAS-SfM and ALS Point Clouds
3.3. Utility of UAS-SfM for Detecting Post-Fire Forest Change
4. Discussion
4.1. DTM and CHM Generation Capability Comparisons
4.2. Comparison of Forest Structure from UAS-SfM and ALS Point Clouds
4.3. Utility of UAS-SfM for Detecting Post-Fire Forest Change
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rundel, P.W.; Arroyo, M.T.K.; Cowling, R.M.; Keeley, J.E.; Lamont, B.B.; Vargas, P. Mediterranean Biomes: Evolution of Their Vegetation, Floras, and Climate. Annu. Rev. Ecol. Evol. Syst. 2016, 47, 383–407. [Google Scholar] [CrossRef]
- Beaty, R.M.; Taylor, A.H. Fire History and the Structure and Dynamics of a Mixed Conifer Forest Landscape in the Northern Sierra Nevada, Lake Tahoe Basin, California, USA. For. Ecol. Manag. 2008, 255, 707–719. [Google Scholar] [CrossRef]
- Cowling, R.; Rundel, P.; Lamont, B.; Arroyo, M.; Arianoutsou, M. Plant Diversity in Mediterranean-Climate Regions. Trends Ecol. Evol. 1996, 11, 362–366. [Google Scholar] [CrossRef]
- Odion, D.C.; Moritz, M.A.; DellaSala, D.A. Alternative Community States Maintained by Fire in the Klamath Mountains, USA: Fire and Alternative Community States. J. Ecol. 2010, 98, 96–105. [Google Scholar] [CrossRef]
- Westerling, A. Wildfire Simulations for California’s Fourth Climate Change Assessment: Projecting Changes in Extreme Wildfire Events with a Warming Climate; California’s Fourth Climate Change Assessment; California Energy Commission: Sacramento, CA, USA, 2018; p. 57.
- Miller, J.D.; Safford, H.D.; Crimmins, M.; Thode, A.E. Quantitative Evidence for Increasing Forest Fire Severity in the Sierra Nevada and Southern Cascade Mountains, California and Nevada, USA. Ecosystems 2009, 12, 16–32. [Google Scholar] [CrossRef]
- Dennison, P.E.; Brewer, S.C.; Arnold, J.D.; Moritz, M.A. Large Wildfire Trends in the Western United States, 1984-2011. Geophys. Res. Lett. 2014, 41, 2928–2933. [Google Scholar] [CrossRef]
- Filippelli, S.K.; Lefsky, M.A.; Rocca, M.E. Comparison and Integration of Lidar and Photogrammetric Point Clouds for Mapping Pre-Fire Forest Structure. Remote Sens. Environ. 2019, 224, 154–166. [Google Scholar] [CrossRef]
- Flannigan, M.D.; Krawchuk, M.A.; de Groot, W.J.; Wotton, B.M.; Gowman, L.M. Implications of Changing Climate for Global Wildland Fire. Int. J. Wildland Fire 2009, 18, 483–507. [Google Scholar] [CrossRef]
- Westerling, A.L.; Bryant, B.P. Climate Change and Wildfire in California. Clim. Chang. 2008, 87, 231–249. [Google Scholar] [CrossRef]
- Alonzo, M.; Andersen, H.-E.; Morton, D.; Cook, B. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Berra, E.F.; Gaulton, R.; Barr, S. Assessing Spring Phenology of a Temperate Woodland: A Multiscale Comparison of Ground, Unmanned Aerial Vehicle and Landsat Satellite Observations. Remote Sens. Environ. 2019, 223, 229–242. [Google Scholar] [CrossRef]
- Arroyo, L.A.; Pascual, C.; Manzanera, J.A. Fire Models and Methods to Map Fuel Types: The Role of Remote Sensing. For. Ecol. Manag. 2008, 256, 1239–1252. [Google Scholar] [CrossRef] [Green Version]
- Stefanidou, A.; Gitas, I.Z.; Katagis, T. A National Fuel Type Mapping Method Improvement Using Sentinel-2 Satellite Data. Geocarto Int. 2020, 1–21. [Google Scholar] [CrossRef]
- Andersen, H.-E.; McGaughey, R.J.; Reutebuch, S.E. Estimating Forest Canopy Fuel Parameters Using LIDAR Data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Marino, E.; Montes, F.; Tomé, J.L.; Navarro, J.A.; Hernando, C. Vertical Forest Structure Analysis for Wildfire Prevention: Comparing Airborne Laser Scanning Data and Stereoscopic Hemispherical Images. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 438–449. [Google Scholar] [CrossRef]
- Kramer, H.A.; Collins, B.M.; Kelly, M.; Stephens, S.L. Quantifying Ladder Fuels: A New Approach Using LiDAR. Forests 2014, 5, 1432–1453. [Google Scholar] [CrossRef]
- Menning, K.M.; Stephens, S.L. Fire Climbing in the Forest: A Semiqualitative, Semiquantitative Approach to Assessing Ladder Fuel Hazards. West. J. Appl. For. 2007, 22, 88–93. [Google Scholar] [CrossRef] [Green Version]
- Donnellan, A.; Harding, D.; Lundgren, P.; Wessels, K.; Gardner, A.; Simard, M.; Parrish, C.; Jones, C.; Lou, Y.; Stoker, J.; et al. Observing Earth’s Changing Surface Topography and Vegetation Structure: A Framework for the Decade; NASA Surface Topography and Vegetation Incubation Study; NASA: Washington, DC, USA, 2021; p. 210.
- Chuvieco, E.; Aguado, I.; Salas, J.; García, M.; Yebra, M.; Oliva, P. Satellite Remote Sensing Contributions to Wildland Fire Science and Management. Curr. For. Rep. 2020, 6, 81–96. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Dial, R.J.; Schulz, B.K.; Andersen, H.-E.; Lewis-Clark, E.; Cook, B.D.; Morton, D.C. Mapping Tall Shrub Biomass in Alaska at Landscape Scale Using Structure-from-Motion Photogrammetry and Lidar. Remote Sens. Environ. 2020, 245, 111841. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High Spatial Resolution Three-Dimensional Mapping of Vegetation Spectral Dynamics Using Computer Vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef] [Green Version]
- Tompalski, P.; White, J.C.; Coops, N.C.; Wulder, M.A. Quantifying the Contribution of Spectral Metrics Derived from Digital Aerial Photogrammetry to Area-Based Models of Forest Inventory Attributes. Remote Sens. Environ. 2019, 234, 111434. [Google Scholar] [CrossRef]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sens. 2020, 13, 77. [Google Scholar] [CrossRef]
- Campbell, M.J.; Dennison, P.E.; Tune, J.W.; Kannenberg, S.A.; Kerr, K.L.; Codding, B.F.; Anderegg, W.R.L. A Multi-Sensor, Multi-Scale Approach to Mapping Tree Mortality in Woodland Ecosystems. Remote Sens. Environ. 2020, 245, 111853. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-Fine Grain Landscape-Scale Quantification of Dryland Vegetation Structure with Drone-Acquired Structure-from-Motion Photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef] [Green Version]
- White, J.C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparison of Airborne Laser Scanning and Digital Stereo Imagery for Characterizing Forest Canopy Gaps in Coastal Temperate Rainforests. Remote Sens. Environ. 2018, 208, 1–14. [Google Scholar] [CrossRef]
- Ackerly, D.D.; Kling, M.M.; Clark, M.L.; Papper, P.; Oldfather, M.F.; Flint, A.L.; Flint, L.E. Topoclimates, Refugia, and Biotic Responses to Climate Change. Front. Ecol. Environ. 2020, 18, 288–297. [Google Scholar] [CrossRef]
- Evett, R.R.; Dawson, A.; Bartolome, J.W. Estimating Vegetation Reference Conditions by Combining Historical Source Analysis and Soil Phytolith Analysis at Pepperwood Preserve, Northern California Coast Ranges, U.S.A: Estimating Vegetation Reference Conditions. Restor. Ecol. 2013, 21, 464–473. [Google Scholar] [CrossRef]
- Nauslar, N.; Abatzoglou, J.; Marsh, P. The 2017 North Bay and Southern California Fires: A Case Study. Fire 2018, 1, 18. [Google Scholar] [CrossRef] [Green Version]
- Pepperwood Preserve. What Does Resilience Look like after Two Fires in Two Years? In Pepperwood Field Notes; Pepperwood Preserve: Santa Rosa, CA, USA, 2019. [Google Scholar]
- CalFire. Top 20 Deadliest California Wildfires; CalFire: Sacramento, CA, USA, 2019.
- CalFire. Top 20 Most Destructive California Wildfires; CalFire: Sacramento, CA, USA, 2019.
- Roussel, J.-R.; Auty, D.; De Boissieu, F.; Sánchez Meador, A.; Jean-François, B. LidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Hijmans, R.J.; van Etten, J.; Sumner, M.; Cheng, J.; Bevan, A.; Bivand, R.; Busetto, L.; Canty, M.; Forrest, D.; Ghosh, A.; et al. Raster: Geographic Data Analysis and Modeling, R Foundation for Statistical Computing: Vienna, Austria, 2019.
- Watershed Sciences. Sonoma County Vegetation Mapping and Lidar Program: Technical Data Report; Watershed Sciences: Portland, OR, USA, 2016. [Google Scholar]
- Eidenshink, J.; Schwind, B.; Brewer, K.; Zhu, Z.-L.; Quayle, B.; Howard, S. A Project for Monitoring Trends in Burn Severity. Fire Ecol. 2007, 3, 3–21. [Google Scholar] [CrossRef]
- Picotte, J.J.; Bhattarai, K.; Howard, D.; Lecker, J.; Epting, J.; Quayle, B.; Benson, N.; Nelson, K. Changes to the Monitoring Trends in Burn Severity Program Mapping Production Procedures and Data Products. Fire Ecol. 2020, 16, 16. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying Burn Severity in a Heterogeneous Landscape with a Relative Version of the Delta Normalized Burn Ratio (DNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Bigdeli, B.; Amini Amirkolaee, H.; Pahlavani, P. DTM Extraction under Forest Canopy Using LiDAR Data and a Modified Invasive Weed Optimization Algorithm. Remote. Sens. Environ. 2018, 216, 289–300. [Google Scholar] [CrossRef]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity Analysis of Parameters and Contrasting Performance of Ground Filtering Algorithms with UAV Photogrammetry-Based and LiDAR Point Clouds. Int. J. Digit. Earth 2020, 13, 1–23. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Green, K.; Tukman, M.; Loudon, D.; Schichtel, A.; Gaffney, K.; Clark, M. Sonoma County Complex Fires of 2017: Remote Sensing Data and Modeling to Support Ecosystem and Community Resiliency. Calif. Fish Wildl. J. 2020, Fire Special Issue, 14–45. Available online: https://nrm.dfg.ca.gov/FileHandler.ashx?DocumentID=184827&inline (accessed on 29 July 2021).
- Adjidjonu, D.; Burgett, J. Assessing the Accuracy of Unmanned Aerial Vehicles Photogrammetric Survey. Int. J. Constr. Educ. Res. 2021, 17, 85–96. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Pelletier, G. Vegetation Phenology Driving Error Variation in Digital Aerial Photogrammetrically Derived Terrain Models. Remote Sens. 2018, 10, 1554. [Google Scholar] [CrossRef] [Green Version]
- Graham, A.; Coops, N.C.; Wilcox, M.; Plowright, A. Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest. Remote Sens. 2019, 11, 84. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Bellman, C.; Hally, B.; Hernandez, J.; Jones, S.; Hillman, S. Assessing the Ability of Image Based Point Clouds Captured from a UAV to Measure the Terrain in the Presence of Canopy Cover. Forests 2019, 10, 284. [Google Scholar] [CrossRef] [Green Version]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. Evaluating the Performance of Photogrammetric Products Using Fixed-Wing UAV Imagery over a Mixed Conifer–Broadleaf Forest: Comparison with Airborne Laser Scanning. Remote Sens. 2018, 10, 187. [Google Scholar] [CrossRef] [Green Version]
- Prata, G.A.; Broadbent, E.N.; de Almeida, D.R.A.; St. Peter, J.; Drake, J.; Medley, P.; Corte, A.P.D.; Vogel, J.; Sharma, A.; Silva, C.A.; et al. Single-Pass UAV-Borne GatorEye LiDAR Sampling as a Rapid Assessment Method for Surveying Forest Structure. Remote Sens. 2020, 12, 4111. [Google Scholar] [CrossRef]
- Giannetti, F.; Chirici, G.; Gobakken, T.; Næsset, E.; Travaglini, D.; Puliti, S. A New Approach with DTM-Independent Metrics for Forest Growing Stock Prediction Using UAV Photogrammetric Data. Remote Sens. Environ. 2018, 213, 195–205. [Google Scholar] [CrossRef]
- Carvajal-Ramírez, F.; Serrano, J.M.P.R.; Agüera-Vega, F.; Martínez-Carricondo, P. A Comparative Analysis of Phytovolume Estimation Methods Based on UAV-Photogrammetry and Multispectral Imagery in a Mediterranean Forest. Remote Sens. 2019, 11, 2579. [Google Scholar] [CrossRef] [Green Version]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Yan, G.; Shao, J. Filtering Airborne LiDAR Data through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef] [Green Version]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, H. Airborne Laser Scanning and Digital Stereo Imagery Measures of Forest Structure: Comparative Results and Implications to Forest Mapping and Inventory Update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Dash, J.P.; Pearse, G.D.; Watt, M.S. UAV Multispectral Imagery Can Complement Satellite Data for Monitoring Forest Health. Remote Sens. 2018, 10, 1216. [Google Scholar] [CrossRef] [Green Version]
- Carvajal-Ramírez, F.; Marques da Silva, J.R.; Agüera-Vega, F.; Martínez-Carricondo, P.; Serrano, J.; Moral, F.J. Evaluation of Fire Severity Indices Based on Pre- and Post-Fire Multispectral Imagery Sensed from UAV. Remote Sens. 2019, 11, 993. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Delgado, R.; Lloret, F.; Pons, X. Influence of Fire Severity on Plant Regeneration by Means of Remote Sensing Imagery. Int. J. Remote Sens. 2003, 24, 1751–1763. [Google Scholar] [CrossRef]
- Larrinaga, A.R.; Brotons, L. Greenness Indices from a Low-Cost UAV Imagery as Tools for Monitoring Post-Fire Forest Recovery. Drones 2019, 3, 6. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Guimarães, N.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Effectiveness of Sentinel-2 in Multi-Temporal Post-Fire Monitoring When Compared with UAV Imagery. IJGI 2020, 9, 225. [Google Scholar] [CrossRef] [Green Version]
- Keeley, J.E.; Syphard, A.D. Twenty-First Century California, USA, Wildfires: Fuel-Dominated vs. Wind-Dominated Fires. Fire Ecol. 2019, 15, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Hillman, S.; Wallace, L.; Lucieer, A.; Reinke, K.; Turner, D.; Jones, S. A Comparison of Terrestrial and UAS Sensors for Measuring Fuel Hazard in a Dry Sclerophyll Forest. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102261. [Google Scholar] [CrossRef]
- Collins, B.M.; Kramer, H.A.; Menning, K.; Dillingham, C.; Saah, D.; Stine, P.A.; Stephens, S.L. Modeling Hazardous Fire Potential within a Completed Fuel Treatment Network in the Northern Sierra Nevada. For. Ecol. Manag. 2013, 310, 156–166. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Tompalski, P.; Crawford, P. Assessing the Status of Forest Regeneration Using Digital Aerial Photogrammetry and Unmanned Aerial Systems. Int. J. Remote Sens. 2018, 39, 5246–5264. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Round One | Round Two | Final | ||||
|---|---|---|---|---|---|---|---|
| Constant | Range | Step | Constant | Range | Step | Constant | |
| Rigidness | 1 | 1–3 | 1 | 3 | 3 | ||
| Grid resolution | 0.5 | 0.1–2.5 | 0.1 | 1 | 0.5–1.1 | 0.01 | 0.45 |
| Distance threshold | 0.5 | 0.1–2.5 | 0.1 | 0.1 | 0–0.2 | 0.01 | 0.01 |
| Time step | 0.65 | 0.1–2.5 | 0.1 | 0.6 | 0.5–1 | 0.01 | 0.58 |
| NDVI threshold | off | 0.1–1 | 0.1 | 0.5 | 0.4–0.6 | 0.01 | 0.55 |
| Conifer | Evergreen Broadleaf | Deciduous Broadleaf | All Forest Types | |||||
|---|---|---|---|---|---|---|---|---|
| Height Metric | Coefficient | r | Coefficient | r | Coefficient | r | Coefficient | r |
| Ladder fuels | +0.09 (0.07) | +0.13 (0.10) | +0.05 (0.09) | +0.08 (0.13) | +0.16 (0.04) | +0.39 (0.07) | +0.16 (0.04) | +0.23 (0.06) |
| Density | ||||||||
| 2–5 m | +0.12 (0.18) | +0.07 (0.08) | +0.09 (0.05) | +0.24 (0.11) | +0.07 (0.06) | +0.18 (0.12) | +0.08 (0.04) | +0.16 (0.08) |
| 5–10 m | +0.36 (0.13) | +0.45 (0.13) | +0.21 (0.05) | +0.39 (0.09) | +0.25 (0.04) | +0.61 (0.09) | +0.33 (0.03) | +0.63 (0.04) |
| 10–15 m | +0.38 (0.08) | +0.64 (0.10) | +0.22 (0.05) | +0.47 (0.10) | +0.21 (0.04) | +0.53 (0.09) | +0.32 (0.02) | +0.67 (0.04) |
| Distribution | ||||||||
| Max | +0.52 (0.12) | +0.67 (0.07) | +0.64 (0.08) | +0.76 (0.07) | +0.62 (0.11) | +0.69 (0.11) | +0.81 (0.03) | +0.89 (0.02) |
| Mean | +0.52 (0.06) | +0.80 (0.05) | +0.38 (0.08) | +0.60 (0.10) | +0.35 (0.09) | +0.56 (0.11) | +0.66 (0.02) | +0.88 (0.02) |
| P5 | +0.01 (0.01) | +0.17 (0.12) | −0.00 (0.02) | +0.00 (0.13) | +0.00 (0.00) | +0.07 (0.10) | +0.01 (0.01) | +0.19 (0.08) |
| P25 | +0.44 (0.06) | +0.66 (0.07) | +0.12 (0.11) | +0.17 (0.15) | +0.03 (0.04) | +0.09 (0.12) | +0.53 (0.04) | +0.74 (0.04) |
| P50 | +0.62 (0.08) | +0.80 (0.05) | +0.39 (0.08) | +0.58 (0.10) | +0.41 (0.12) | +0.41 (0.12) | +0.73 (0.03) | +0.86 (0.02) |
| P75 | +0.61 (0.09) | +0.77 (0.05) | +0.44 (0.07) | +0.68 (0.09) | +0.47 (0.11) | +0.59 (0.12) | +0.75 (0.03) | +0.89 (0.02) |
| P95 | +0.56 (0.10) | +0.73 (0.06) | +0.55 (0.07) | +0.75 (0.07) | +0.55 (0.11) | +0.67 (0.11) | +0.78 (0.03) | +0.89 (0.02) |
| Variation | ||||||||
| SD | +0.24 (0.08) | +0.29 (0.09) | +0.47 (0.05) | +0.72 (0.07) | +0.28 (0.12) | +0.33 (0.15) | +0.71 (0.04) | +0.72 (0.03) |
| Skewness | +0.29 (0.04) | +0.63 (0.08) | +0.16 (0.09) | +0.28 (0.11) | +0.05 (0.04) | +0.15 (0.11) | +0.15 (0.04) | +0.33 (0.07) |
| Kurtosis | +0.05 (0.02) | +0.42 (0.12) | −0.02 (0.04) | −0.05 (0.08) | −0.03 (0.01) | −0.33 (0.08) | +0.01 (0.01) | +0.04 (0.08) |
| Conifer | Evergreen Broadleaf | Deciduous Broadleaf | All Forest Types | |||||
|---|---|---|---|---|---|---|---|---|
| Height Metric | Coefficient | r | Coefficient | r | Coefficient | r | Coefficient | r |
| Ladder fuels | +0.16 (0.06) | +0.26 (0.10) | +0.02 (0.10) | +0.04 (0.14) | +0.08 (0.04) | +0.19 (0.10) | +0.08 (0.04) | +0.13 (0.07) |
| Density | ||||||||
| 2–5 m | +0.40 (0.13) | +0.35 (0.10) | +0.16 (0.08) | +0.33 (0.14) | +0.18 (0.07) | +0.43 (0.10) | +0.20 (0.05) | +0.40 (0.08) |
| 5–10 m | +0.54 (0.08) | +0.74 (0.07) | +0.35 (0.05) | +0.61 (0.07) | +0.23 (0.04) | +0.61 (0.07) | +0.36 (0.03) | +0.70 (0.03) |
| 10–15 m | +0.62 (0.06) | +0.83 (0.04) | +0.35 (0.04) | +0.72 (0.07) | +0.26 (0.03) | +0.68 (0.07) | +0.39 (0.02) | +0.80 (0.03) |
| Distribution | ||||||||
| Max | +0.72 (0.18) | +0.81 (0.09) | +0.71 (0.10) | +0.79 (0.08) | +0.73 (0.11) | +0.85 (0.12) | +0.92 (0.04) | +0.93 (0.02) |
| Mean | +0.65 (0.09) | +0.84 (0.07) | +0.41 (0.10) | +0.60 (0.15) | +0.49 (0.06) | +0.81 (0.06) | +0.75 (0.03) | +0.91 (0.03) |
| P5 | +0.01 (0.01) | +0.23 (0.05) | −0.01 (0.03) | −0.03 (0.15) | −0.00 (0.01) | −0.03 (0.11) | +0.01 (0.01) | +0.17 (0.10) |
| P25 | +0.57 (0.10) | +0.67 (0.08) | +0.13 (0.12) | +0.17 (0.15) | +0.02 (0.02) | +0.11 (0.10) | +0.60 (0.05) | +0.75 (0.04) |
| P50 | +0.76 (0.12) | +0.82 (0.07) | +0.41 (0.10) | +0.57 (0.13) | +0.66 (0.09) | +0.70 (0.07) | +0.83 (0.04) | +0.89 (0.03) |
| P75 | +0.78 (0.14) | +0.83 (0.07) | +0.49 (0.10) | +0.69 (0.12) | +0.64 (0.08) | +0.82 (0.08) | +0.86 (0.03) | +0.92 (0.02) |
| P95 | +0.75(0.16) | +0.84(0.08) | +0.61(0.10) | +0.77(0.09) | +0.69(0.10) | +0.85(0.10) | +0.89(0.03) | +0.93(0.02) |
| Variation | ||||||||
| SD | +0.22(0.10) | +0.21(0.10) | +0.50(0.06) | +0.69(0.07) | +0.26(0.10) | +0.35(0.14) | +0.80(0.05) | +0.67(0.03) |
| Skewness | +0.30(0.07) | +0.48(0.09) | +0.25(0.05) | +0.45(0.07) | +0.12(0.04) | +0.35(0.11) | +0.18(0.03) | +0.34(0.05) |
| Kurtosis | +0.06(0.02) | +0.28(0.10) | −0.01(0.03) | −0.04(0.08) | −0.02(0.01) | −0.25(0.15) | −0.01(0.01) | −0.03(0.06) |
| Metric and Sample | χ2 | p | df | N |
|---|---|---|---|---|
| Pre-fire ladder fuel | ||||
| All forests | 18.99 | <0.001 | 3 | 220 |
| Conifer | 2.59 | 0.46 | 3 | 80 |
| Evergreen broadleaf | 13.68 | 0.003 | 3 | 80 |
| Deciduous broadleaf | 0.41 | 0.82 | 2 | 60 |
| ∆P95 | ||||
| All forests | 7.16 | 0.06 | 3 | 220 |
| Conifer | 0.79 | 0.85 | 3 | 80 |
| Evergreen broadleaf | 10.82 | 0.01 | 3 | 80 |
| Deciduous broadleaf | 0.73 | 0.69 | 2 | 60 |
| ∆P75 | ||||
| All forests | 35.01 | <0.001 | 3 | 220 |
| Conifer | 10.98 | 0.01 | 3 | 80 |
| Evergreen broadleaf | 30.41 | <0.001 | 3 | 80 |
| Deciduous broadleaf | 1.17 | 0.56 | 2 | 60 |
| P75 NDVI | ||||
| All forests | 89.81 | <0.001 | 3 | 220 |
| Conifer | 54.49 | <0.001 | 3 | 80 |
| Evergreen broadleaf | 35.31 | <0.001 | 3 | 80 |
| Deciduous broadleaf | 9.21 | 0.01 | 2 | 60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reilly, S.; Clark, M.L.; Bentley, L.P.; Matley, C.; Piazza, E.; Oliveras Menor, I. The Potential of Multispectral Imagery and 3D Point Clouds from Unoccupied Aerial Systems (UAS) for Monitoring Forest Structure and the Impacts of Wildfire in Mediterranean-Climate Forests. Remote Sens. 2021, 13, 3810. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13193810
Reilly S, Clark ML, Bentley LP, Matley C, Piazza E, Oliveras Menor I. The Potential of Multispectral Imagery and 3D Point Clouds from Unoccupied Aerial Systems (UAS) for Monitoring Forest Structure and the Impacts of Wildfire in Mediterranean-Climate Forests. Remote Sensing. 2021; 13(19):3810. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13193810
Chicago/Turabian StyleReilly, Sean, Matthew L. Clark, Lisa Patrick Bentley, Corbin Matley, Elise Piazza, and Imma Oliveras Menor. 2021. "The Potential of Multispectral Imagery and 3D Point Clouds from Unoccupied Aerial Systems (UAS) for Monitoring Forest Structure and the Impacts of Wildfire in Mediterranean-Climate Forests" Remote Sensing 13, no. 19: 3810. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13193810