
Performance of Multi-GNSS Real-Time UTC(NTSC) Time and Frequency Transfer Service Using Carrier Phase Observations


Abstract
:1. Introduction
2. Model of Real-Time GNSS Time and Frequency Transfer in Prototype System
2.1. SSR Products of Satellite Orbits and Clocks
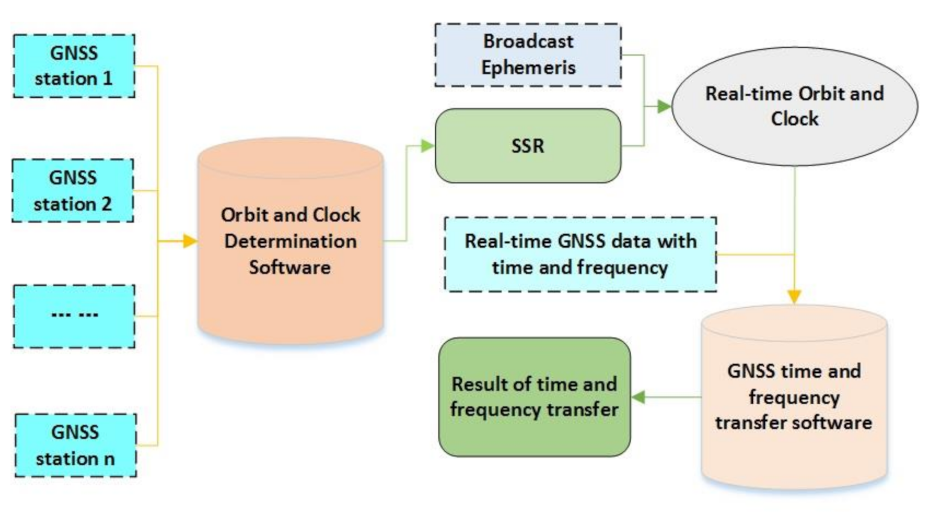
2.2. Structure of Real-Time Prototype System
3. Results
3.1. Multi-GNSS SSR Products in Prototype System
3.2. Evaluation of Real-Time GNSS Time Transfer
3.2.1. GPS
3.2.2. BDS
3.2.3. GLONASS
3.2.4. Galileo
4. Discussion
5. Conclusions
- (1)
- Regarding the satellite orbit products, GPS solution in prototype system performed the best in the averaged RMS values in the three directions when compared to the BDS, GLONASS, and Galileo systems. For the available satellites, the mean values were 5.07 cm for GPS, 212 cm for the GEO constellation of BDS, 9.39 cm for the IGSO and MEO constellations of BDS, 9.57 cm for GLONASS, and 10.35 cm for Galileo.
- (2)
- For the clock products in the prototype system, the mean RMS values for all the satellites were 2.74 ns for GPS, 6.74 ns for the GEO constellation of BDS, 3.24 ns for IGSO, and 1.39 ns for MEO. The mean value for GLONASS was 4.34 ns, whereas that of Galileo was 1.32 ns.
- (3)
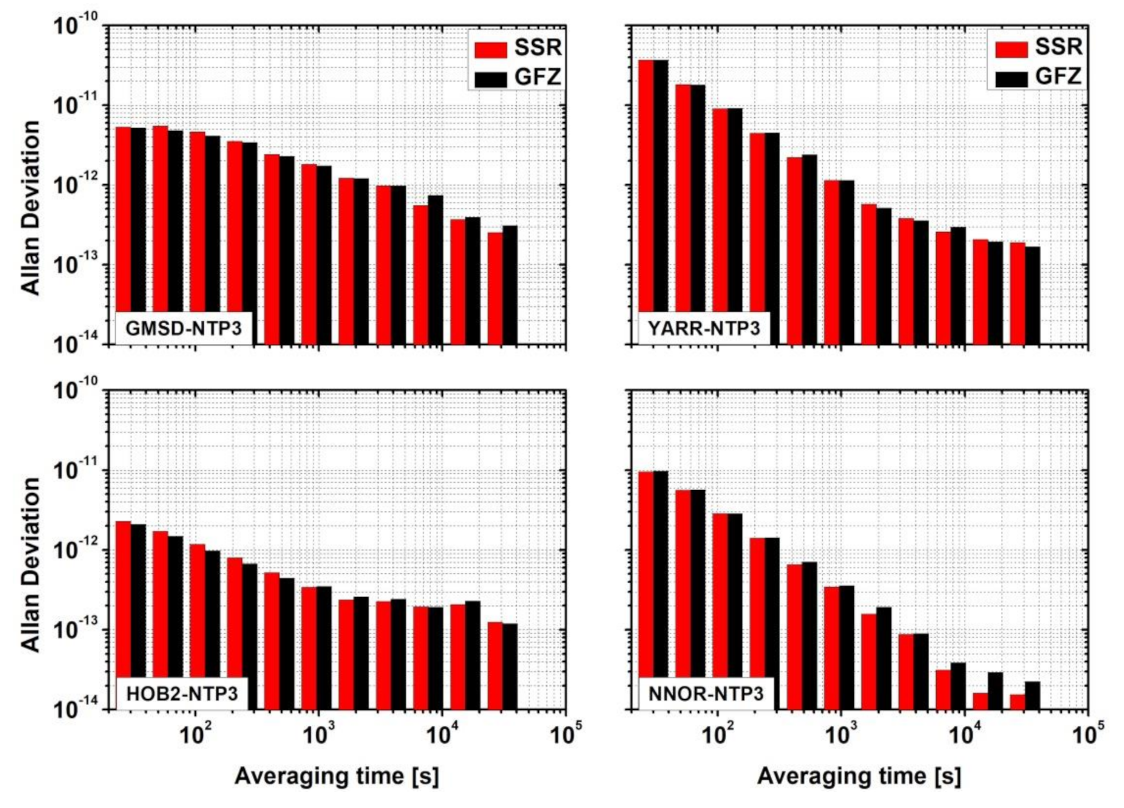
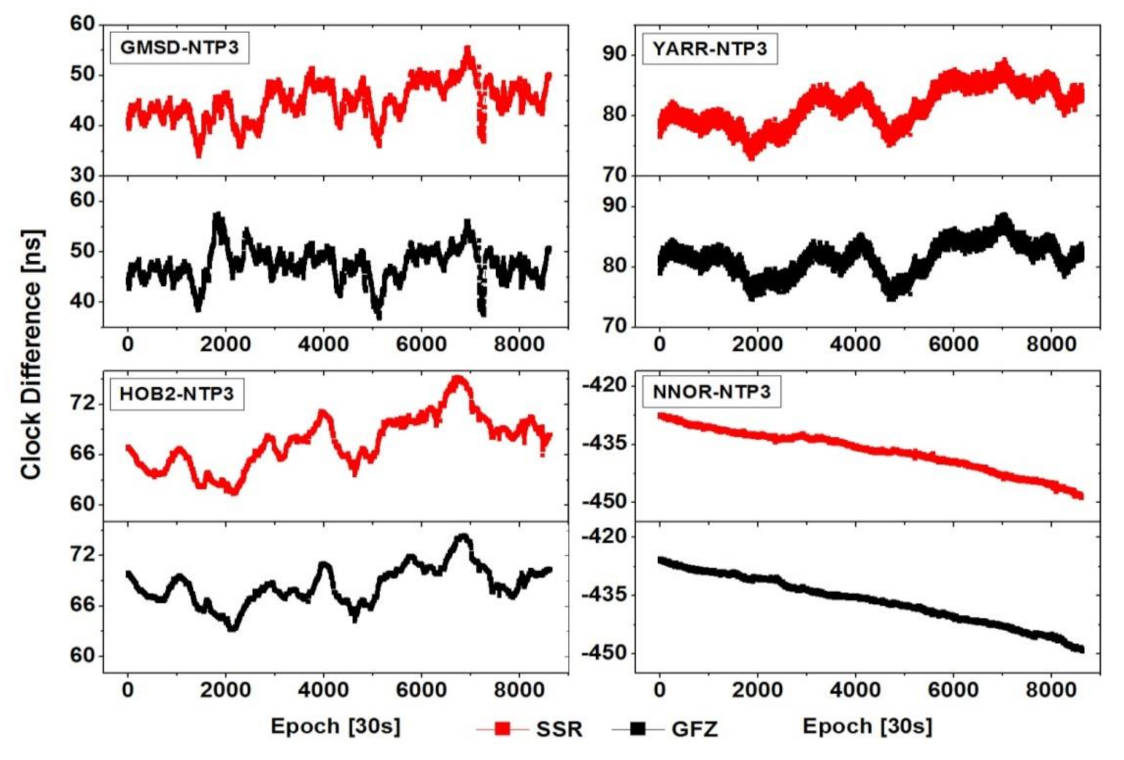
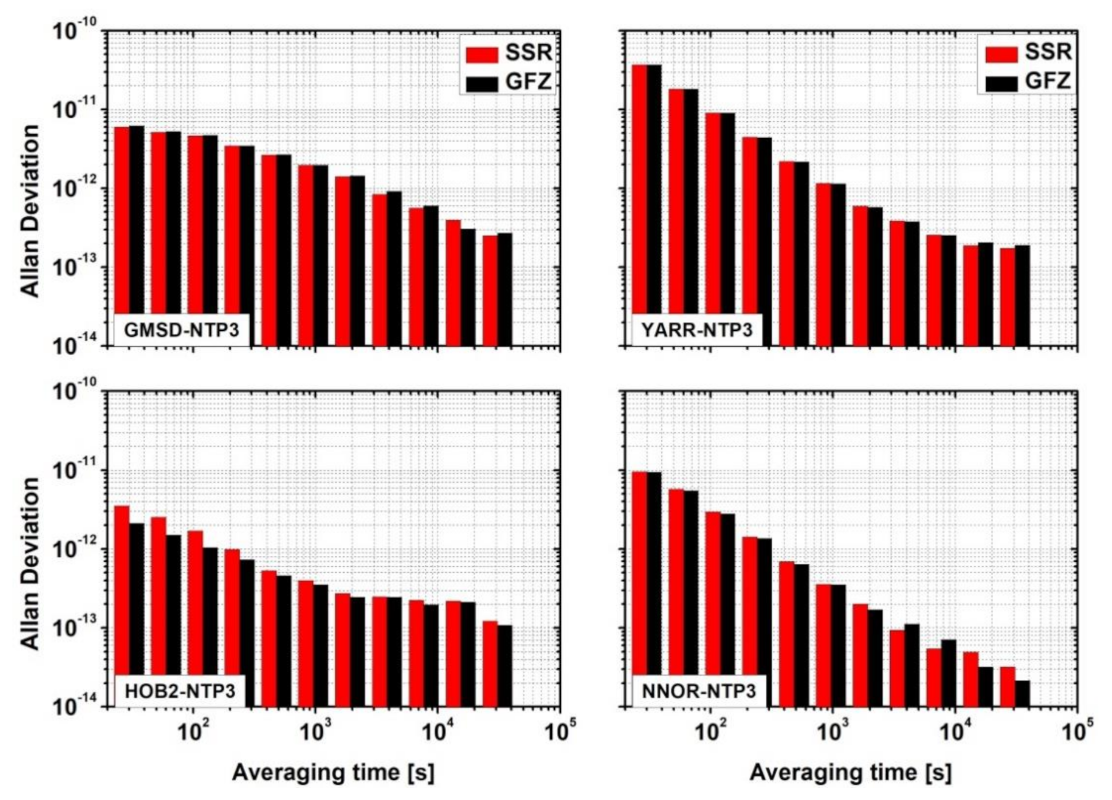
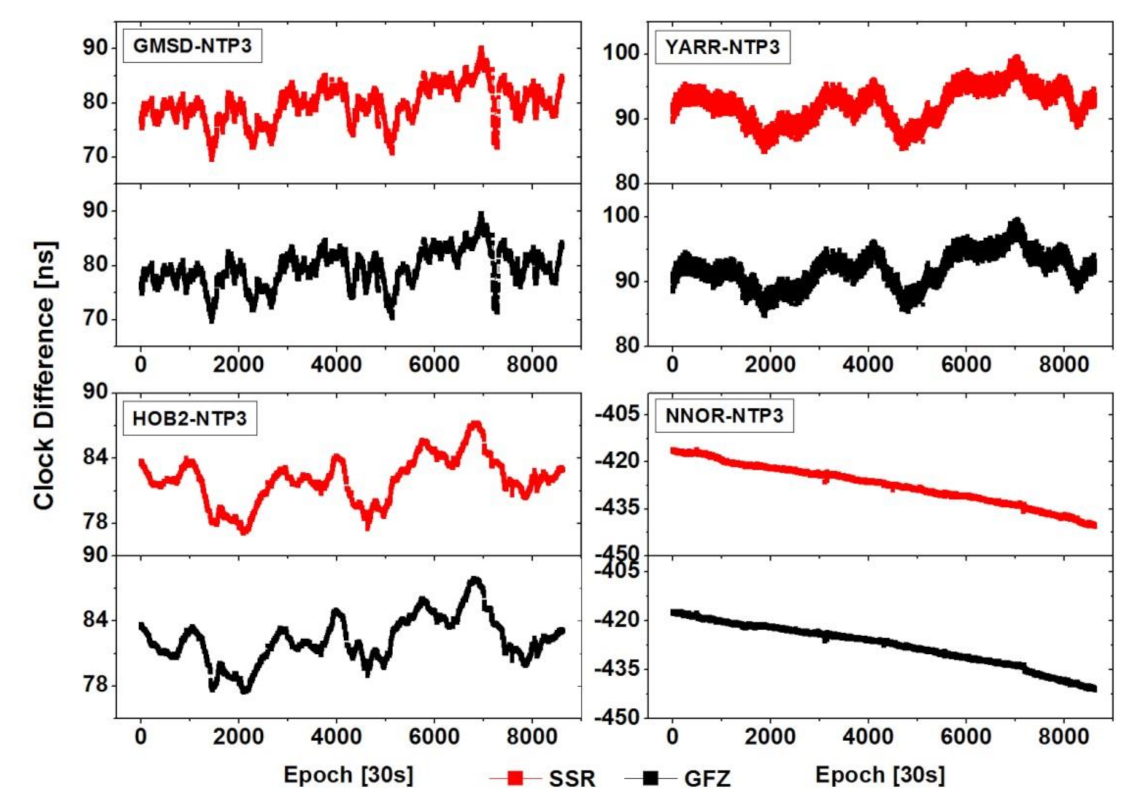
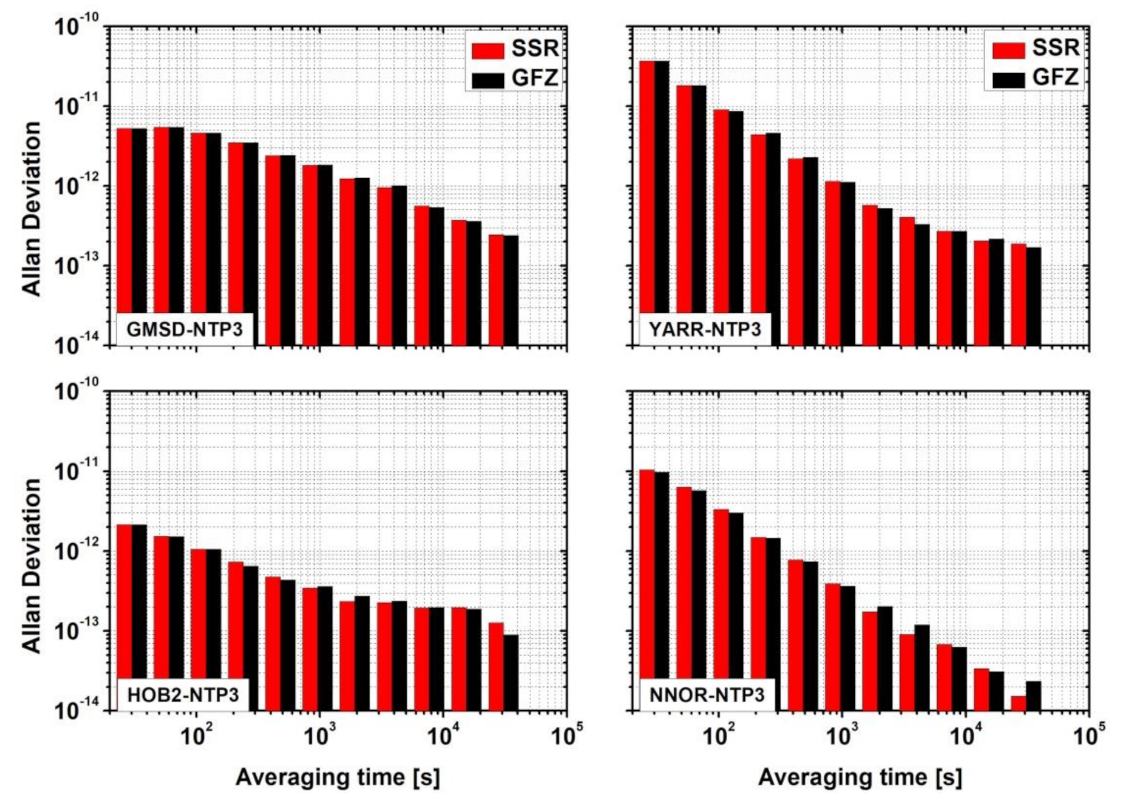
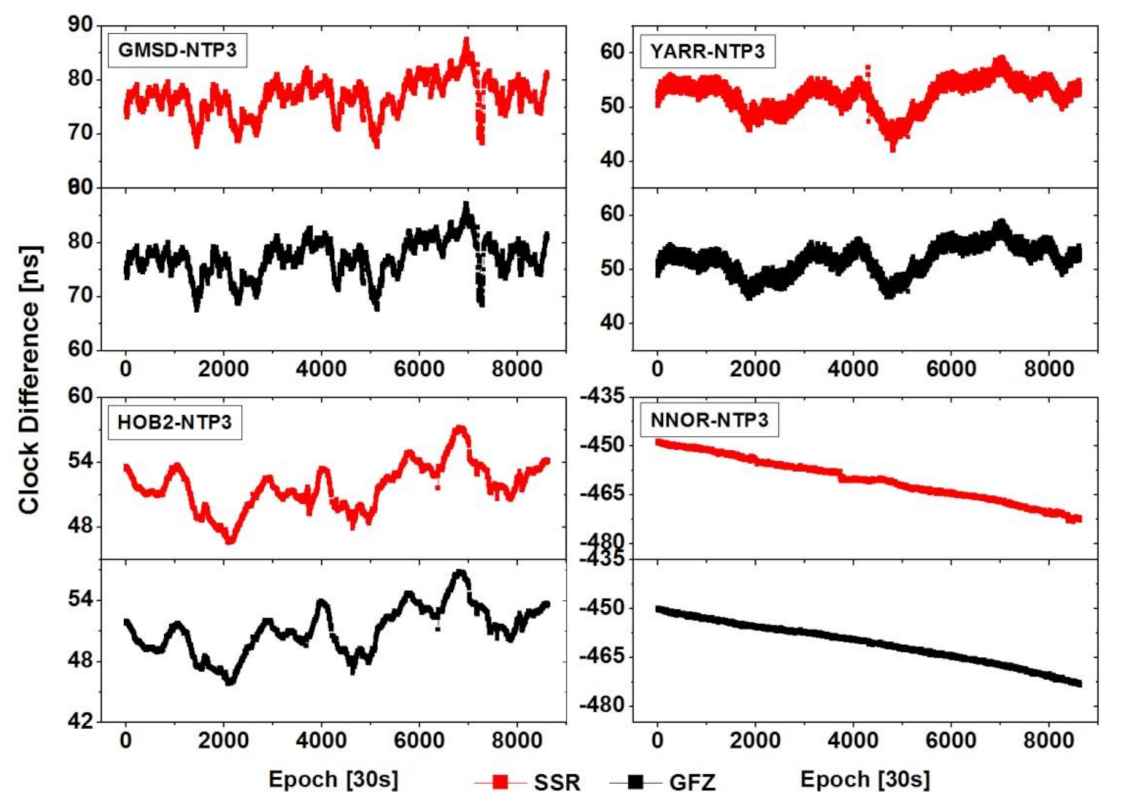
- With respect to the time transfer service, the RMS values of the smoothed residuals at all time links could reach the sub-nanosecond accuracy level, regardless of whether the prototype system or GFZ solution was used, in GPS, BDS, GLONASS, and Galileo. Overall, the prototype system solutions are similar to that of GFZ regarding the noise level of the time link. For the ADEV of the time links, the characters of the prototype system solution are also equivalent to that of GFZ at different time intervals for the four time links. The frequency stability within 10,000 s was 3.52 × 10−12 for SSR and 3.47 × 10−12 for GFZ and GPS. For the four time links, it was 3.63 × 10−12 for SSR and 3.53 × 10−12 for GFZ for BDS, 3.57 × 10−12 for SSR and 3.52 × 10−12 for GFZ for GLONASS, and 3.56 × 10−12 for SSR and 3.48 × 10−12 for GFZ for Galileo.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Allan, D.W.; Thomas, C. Technical directives for standardization of GPS time receiver software. Metrologia 1994, 31, 69–79. [Google Scholar] [CrossRef]
- Allan, D.W.; Weiss, M. Accurate time and frequency transfer during common-view of a GPS satellite. In Proceedings of the 1980 IEEE Frequency Control Symposium, Philadelphia, PA, USA, 28–30 May 1980; pp. 334–356. [Google Scholar]
- Petit, G.; Jiang, Z. GPS All in View time transfer for TAI computation. Metrologia 2008, 45, 35–45. [Google Scholar] [CrossRef]
- Jiang, Z.; Lewandowski, W. Use of GLONASS for UTC time transfer. Metrologia 2012, 49, 57–61. [Google Scholar] [CrossRef]
- Defraigne, P.; Bruyninx, C.; Guyennon, N. PPP and phase only GPS frequency transfer. In Proceedings of the IEEE International Frequency Control Symposium Jointly with the 21st European Frequency and Time Forum (EFTF’ 07), Geneva, Switzerland, 29 May–1 June 2007; pp. 904–908. [Google Scholar]
- Defraigne, P.; Baire, Q. Combining GPS and GLONASS for time and frequency transfer. Adv. Space Res. 2011, 47, 265–275. [Google Scholar] [CrossRef]
- Defraigne, P.; Bruyninx, C. On the link between GPS pseudorange noise and day-boundary discontinuities in geodetic time transfer solutions. GPS Solut. 2007, 11, 239–249. [Google Scholar] [CrossRef]
- Delporte, J.; Mercier, F.; Laurichesse, D.; Galy, O. GPS carrier phase time transfer using single difference integer ambiguity resolution. Int. J. Navig. Obs. 2008, 2008, 273785. [Google Scholar] [CrossRef] [Green Version]
- Guang, W.; Dong, S.; Wu, J.; Zhang, Y.; Yuan, S. Progress of BeiDou time transfer at NTSC. Metrologia 2018, 55, 175–187. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Cai, H. Day-Boundary Discontinuity in GPS Carrier-Phase Time Transfer Using a Geodetic Data Solution Strategy. J. Surv. Eng. 2019, 145, 04018013. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, P.; Zhang, R.; Liu, J.; Lu, X. Modeling and Assessment of Precise Time Transfer by Using BeiDou Navigation Satellite System Triple-Frequency Signals. Sensors 2018, 18, 1017. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)–Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D.; Angrisano, A.; Gaglione, S.; Fortuny-Guasch, J. A Galileo IOV assessment: Measurement and position domain. GPS Solut. 2015, 19, 187–199. [Google Scholar] [CrossRef] [Green Version]
- Uhlemann, M.; Gendt, G.; Ramatsch, M.; Deng, Z. GFZ Global Multi-GNSS Network and Data Processing Results. In IAG 150 Years. International Association of Geodesy Symposia; Rizos, C., Willis, P., Eds.; Springer: Cham, Switzerland, 2015; Volume 143, pp. 673–679. [Google Scholar]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Petit, G.; Arias, F.; Harmegnies, A.; Panfilo, G.; Tisserand, L. UTCr: A rapid realization of UTC. Metrologia 2013, 51, 33–39. [Google Scholar] [CrossRef]
- Defraigne, P.; Aerts, W.; Pottiaux, E. Monitoring of UTC(k)’s using PPP and IGS real-time products. GPS Solut. 2015, 19, 165–172. [Google Scholar] [CrossRef]
- Teunissen. GNSS Precise Point Positioning. Chapter 20 in Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; Jade Morton, Y., Ed.; John Wiley & Son: Hoboken, NJ, USA, 2021. [Google Scholar]
- An, X.D.; Meng, X.L.; Jiang, W.P. Multi-constellation GNSS precise point positioning with multi-frequency raw observations and dual-frequency observations of ionospheric-free linear combination. Satell. Navig. 2020, 1, 7. [Google Scholar] [CrossRef]
- Tavella, P.; Petit, G. Precise time scales and navigation systems: Mutual benefits of timekeeping and positioning. Satell. Navig. 2020, 1, 10. [Google Scholar] [CrossRef]
- Petit, G.; Defraigne, P. The performance of GPS time and frequency transfer: Comment on ‘A detailed comparison of two continuous GPS carrier phase time transfer techniques’. Metrologia 2016, 53, 1003–1008. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. Performance Analysis of Several GPS/Galileo Precise Point Positioning Models. Sensors 2015, 15, 14701–14726. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, P.; Tu, R.; Zhang, R.; Gao, Y.; Cai, H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sens. 2018, 10, 324. [Google Scholar] [CrossRef] [Green Version]
- Rovera, G.D.; Torre, J.M.; Sherwood, R.; Abgrall, M.; Courde, C.; Laas-Bourez, M.; Uhrich, P. Link calibration against receiver calibration: An assessment of GPS time transfer uncertainties. Metrologia 2014, 51, 476–490. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Guang, W.; Zhang, R.; Cai, H. Study of time link calibration based on GPS carrier phase observation. IET Radar Sonar Navig. 2018, 12, 1330–1335. [Google Scholar] [CrossRef]
- Nicolini, L.; Caporali, A. Investigation on Reference Frames and Time Systems in Multi-GNSS. Remote Sens. 2018, 10, 80. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, Z.; Yuan, H. Validation and Assessment of Multi-GNSS Real-Time Precise Point Positioning in Simulated Kinematic Mode Using IGS Real-Time Service. Remote Sens. 2018, 10, 337. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, J. Realization and analysis of real-time precise point positioning based on SSR broadcast ephemeris corrections. Sci. Surv. Mapp. 2014, 39, 15–19. [Google Scholar]
- Janicka, J.; Tomaszewski, D.; Rapinski, J.; Jagoda, M.; Rutkowska, M. The Prediction of Geocentric Corrections during Communication Link Outages in PPP. Sensors 2020, 20, 602. [Google Scholar] [CrossRef] [Green Version]
- Pelc-Mieczkowska, R.; Tomaszewski, D. Space State Representation Product Evaluation in Satellite Position and Receiver Position Domain. Sensors 2020, 20, 3791. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Liu, N.; Zhang, R. Evaluation of carrier-phase precise time and frequency transfer using different analysis centre products for GNSSs. Meas. Sci. Technol. 2019, 30, 065003. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Zhang, R.; Han, J. Performance of Galileo precise time and frequency transfer models using quad-frequency carrier phase observations. GPS Solut. 2020, 24, 40. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Wu, W.; Liu, J.; Wang, X.; Zhang, R. Initial accuracy and reliability of current BDS-3 precise positioning, velocity estimation, and time transfer (PVT). Adv. Space Res. 2020, 65, 1225–1234. [Google Scholar] [CrossRef]
- Lin, P.; Li, X.; Zhang, X.; Li, X.; Lu, C.; Zhao, Q.; Liu, J. Considering Inter-Frequency Clock Bias for BDS Triple-Frequency Precise Point Positioning. Remote Sens. 2017, 9, 734. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Huang, G.; Zhang, Q.; Gao, Y.; Gao, Y.; Luo, Y. GPS/BDS-2/Galileo Precise Point Positioning Ambiguity Resolution Based on the Uncombined Model. Remote Sens. 2020, 12, 1853. [Google Scholar] [CrossRef]
- Wang, A.; Chen, J.; Zhang, Y.; Meng, L.; Wang, J. Performance of Selected Ionospheric Models in Multi-Global Navigation Satellite System Single-Frequency Positioning over China. Remote Sens. 2019, 11, 2070. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.; Zhang, X.; Liu, J.; Li, X.; Li, X. Performance evaluation of single-frequency precise point positioning with GPS, GLONASS, BeiDou and Galileo. J. Navig. 2017, 70, 465–482. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Hong, J.; Han, J.; Lu, X. Comparison of Multi-GNSS Time and Frequency Transfer Performance Using Overlap-Frequency Observations. Remote Sens. 2021, 13, 3130. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, R.; Zhang, P.; Han, J.; Fan, L.; Lu, X. Recover the abnormal positioning, velocity and timing services caused by BDS satellite orbital maneuvers. Satell. Navig. 2021, 2, 16. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Models/Strategies |
|---|---|
| Observations | Pseudorange and carrier phase observation |
| Constellations and Frequency | BDS(B1/B2), GPS(L1/L2), Galileo(E1/E5a),GLONASS(L1/L2) |
| Satellite orbit and clock | Real-time GNSS products derived from NTSC |
| Cycle slip of carrier phase | Geometry-free (GF) + Hatch–Melbourne–Wübbena (HMW) |
| Tropospheric delay | Initial model(Saastamoinen) + random-walk process [36] |
| Priori standard deviation | 0.3 m (Pseudorange), 0.003 m(Carrier phase) [37,38,39] |
| Phase wind-up | Model-corrected |
| Receiver clock offset | Estimated as white noise [40] |
| Tidal effects | Solid tide, pole tide, ocean loading |
| Phase ambiguities | Float solution [41] |
| Estimator | Least square estimation in sequential mode |
| GNSS | Orbit | Clock | |
|---|---|---|---|
| RMS (cm) | RMS (ns) | STD (ns) | |
| GPS | 5.07 | 2.74 | 0.35 |
| BDS(GEO) | 212.20 | 6.74 | 0.55 |
| BDS(IGSO) | 10.27 | 3.24 | 0.31 |
| BDS(MEO) | 8.50 | 1.39 | 0.24 |
| GLONASS | 9.57 | 4.34 | 0.42 |
| Galileo | 10.35 | 1.32 | 0.30 |
| Name | Receiver | Antenna | Frequency Standard | Location |
|---|---|---|---|---|
| NPT3 | Sept Polarx4TR | SEPCHOKE_MC | UTC(NTSC) | 34.37°N, 109.22°E |
| GMSD | Trimble NetR9 | TRM59800 | Cesium | 30.56°N, 131.02°E |
| YARR | Sept Polarx5 | LEIATT504 | Cesium | 29.05°S, 115.35°E |
| HOB2 | Sept Polarx5 | AOAD | H-maser | 42.80°S, 147.44°E |
| NNOR | Sept Polarx5TR | SEPCHOKE_B3E6 | Slaved Crystal | 31.05°S, 116.19°E |
| GPS Solutions | GMSD–NTP3 | YARR–NTP3 | HOB2–NTP3 | NNOR–NTP3 |
|---|---|---|---|---|
| SSR (ns) | 0.939 | 0.638 | 0.224 | 0.200 |
| GFZ (ns) | 0.908 | 0.634 | 0.221 | 0.200 |
| BDS Solutions | GMSD–NTP3 | YARR–NTP3 | HOB2–NTP3 | NNOR–NTP3 |
|---|---|---|---|---|
| SSR (ns) | 0.955 | 0.639 | 0.260 | 0.205 |
| GFZ (ns) | 0.963 | 0.636 | 0.228 | 0.203 |
| GLONASS Solutions | GMSD–NTP3 | YARR–NTP3 | HOB2–NTP3 | NNOR–NTP3 |
|---|---|---|---|---|
| SSR (ns) | 0.934 | 0.643 | 0.222 | 0.216 |
| GFZ (ns) | 0.913 | 0.633 | 0.226 | 0.204 |
| Galileo Solutions | GMSD–NTP3 | YARR–NTP3 | HOB2–NTP3 | NNOR–NTP3 |
|---|---|---|---|---|
| SSR (ns) | 0.945 | 0.648 | 0.231 | 0.217 |
| GFZ (ns) | 0.936 | 0.636 | 0.223 | 0.194 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Tu, R.; Lu, X.; Fan, L.; Zhang, R. Performance of Multi-GNSS Real-Time UTC(NTSC) Time and Frequency Transfer Service Using Carrier Phase Observations. Remote Sens. 2021, 13, 4184. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13204184
Zhang P, Tu R, Lu X, Fan L, Zhang R. Performance of Multi-GNSS Real-Time UTC(NTSC) Time and Frequency Transfer Service Using Carrier Phase Observations. Remote Sensing. 2021; 13(20):4184. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13204184
Chicago/Turabian StyleZhang, Pengfei, Rui Tu, Xiaochun Lu, Lihong Fan, and Rui Zhang. 2021. "Performance of Multi-GNSS Real-Time UTC(NTSC) Time and Frequency Transfer Service Using Carrier Phase Observations" Remote Sensing 13, no. 20: 4184. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13204184