1. Introduction
The agricultural management of extended crops, on its day-by-day evolution, requires extensive and comprehensive tools that allow a full knowledge of the plants’ status [
1,
2]. Plant activity can be analyzed through a number of variables, all strictly linked to one another through the energy and water mass balances in the surface–atmosphere layer [
3,
4,
5].
The characterization of the main driving forces allows modelling the water mass exchanges [
6]. Evapotranspiration (ET), the sum of the water freely evaporated from the soil (and the leaves surface) and transpired through the leaf stomata in plants, is often considered a proxy for plant growth rate [
7,
8]. The water mass balance and the energy balance are coupled through the ET-Latent Heat relation [
9,
10].
The simplest models are lumped: fluxes are computed vertically, for a single point in space, and they are assumed as representative of the entire reference area [
11]. In distributed models, the interest area is subdivided as more or less extended
The cells, each with their own local characteristics, and the fluxes are computed for all cells in an attempt to capture their spatial heterogeneity [
12]. The improved accuracy comes at the cost of a more extensive data collection and at the risk of worsening model errors through overparameterization [
11,
13].
In this framework, the galloping progress [
14,
15] of Remote Sensing (RS) has allowed a boost in distributed modelling: data can be obtained with a relatively high temporal frequency (up to a daily basis) and with varying spatial resolutions (up to 10 m for freely available satellite data with continuous data coverage). Field campaigns with flight-borne tools and Unmanned Aerial Vehicles (UAVs), although money- and time-consuming, can improve these resolutions to 1 m and 1 cm, respectively [
16,
17]. Thus, the joint use of flux modelling and RS can help determine, with varying time frequencies and spatial accuracies, the crop ET in order to optimize the irrigation water use [
18,
19,
20,
21,
22].
According to their energy partition principles, energy balance models can be classified as One-Source (1S) or Two-Source (2S). The former assumes complete cell homogeneity in the energy exchanges [
23]; the latter identifies a vegetated and a non-vegetated sub-area within the given cell and differentiates the energy exchange dynamics of the two [
24,
25]. By construction, 1S models are more appropriate for homogeneous crops, like maize and cotton [
26,
27]; 2S models can better interpret heterogeneous ones, such as arboreal crops [
28].
Spatial resolution is a key parameter in the surface energy flux modelling [
29]. Pixel homogeneity can be identified as the main issue [
13,
30]. Ershadi et al. [
31] affirm that many models may struggle with aggregation since pixel homogeneity is commonly assumed in terms of meteorological conditions (true for field-scale problems) and land surface characteristics (true only for some crops). For what concerns vegetation, a field-size resolution would be ideal according to Anderson et al. [
32], since they showed that vegetation indices heterogeneity within a field can be assumed to be linear, whereas the same cannot be said for intra-field heterogeneity. On the other hand, some crops such as vineyards are “typically characterized by natural spatial variability […] not only among different vineyards but also at smaller scales within the same vineyard” [
33]. Liang [
34] found linearity in the 30 m–1 km range for the aggregation of leaf area index and albedo, although doubting the efficacy of satellite-retrieved leaf area index in land surface models over heterogeneous regions. Moran et al. [
35] found that high relative errors on aggregating land surface temperature (>50%) were due to the non-linearity of the relations between sensors and models. Ershadi et al. [
31] focused on the dependency of roughness lengths (used to compute aerodynamic resistances) on spatial resolution.
A number of ET-focused studies have tested the influence of spatial resolution. Kustas et al. [
36] employed histograms to investigate the effect of low-resolution input data in latent and sensible heat fluxes modelled with TSEB. Their case study was homogeneous in terms of overall land cover, with a duality in terms of crop type between corn and soybean. The analysis focused mainly on the histogram shapes across scales, trying to identify the two ET peaks corresponding to the two crops, progressively less visible until the 960 m resolution. In their study, Ershadi et al. [
31] operated a dual aggregation approach: at a series of resolutions, energy fluxes were computed both as aggregations of high-resolution products (“calculate, then aggregate”) and as model results of aggregated model inputs (“aggregate, then calculate”). In the case of input aggregation, they found major relative errors for the latent heat (>40%), in particular at the coarsest resolution (960 m), attributing them to the land surface heterogeneity and its incompatibility with the low-resolution roughness height parameterization. A similar approach was taken by Sharma et al. [
37]. They obtained surface energy fluxes from the SEBS model, employing high resolution (60 m) Landsat temperature data. Using the simple averaging aggregating method, they found that ET data were better preserved with output upscaling than with input upscaling, as in the former case the coarser-scale ET relative error reached, at most, 28%, whereas in the latter it stretched just above 40%.
In this work, scale effects on a distributed hydrological model, FEST-EWB [
38] are analyzed. The model closes, for every pixel, the energy and water mass balances employing the Representative Equilibrium Temperature (RET), the model equivalent of the Land Surface Temperature (LST), as an internal variable. By construction, the model is a hybrid between the 1S and 2S models, partitioning the turbulent fluxes (Latent and Sensible Heat) among the vegetated and non-vegetated components of each cell [
38]. The test site is a vineyard in Sicily, for which high-resolution (1.7 m) temperature and vegetation data have been gathered in summer 2008 by airborne proximal sensing [
39,
40]. A high-resolution run of the model is employed as a reference for a comparison between lower-resolution results: on the one hand, model outputs are aggregated to coarser scales; on the other, model inputs are upscaled before independent model runs produce the same outputs directly at the coarser resolutions.
The main objective is to determine the model sensitivity to spatial resolution, in particular providing a more operative and practical perspective by focusing on the ET, frequently used in support of irrigation. As the scales chosen for the analysis are related to those of commonly available RS data (such as reflectance from Sentinel-2 or thermal data from Landsat and MODIS), ranging from 10 to 1000 m, this study aims to evaluate the performance of the model with different input data over a complex and heterogeneous area such as a vineyard.
The main investigation points are:
Are high-resolution data strictly necessary to accurately model an area as heterogeneous as a vineyard?
Can a high-resolution calibration help the model to interpret low-resolution data?
Does the low-resolution model run provide worse results than the upscaled results of a high-resolution run?
2. Materials and Methods
The first part of this work consists of a preliminary step that establishes the calibration and validation of the FEST-EWB distributed hydrological model over the vineyard test-case (
Section 3.1). Model inputs include meteorological data from an eddy covariance station in the middle of the test field (
Section 2.3.3) and radiometric measurements obtained from five flights conducted in the summer of 2008 (
Section 2.3). The model ET results are employed in the validation step and also compared with the other energy balance models, SEBAL Mountain (hereinafter “SEBAL”) and TSEB, detailed by Ciraolo et al. [
39] (
Section 3.1.2 and
Section 3.1.3).
The second step is the scale analysis proper. Both model inputs and outputs are upscaled to four coarser resolutions associated with some common RS products. In
Section 3.3, model inputs have been employed to perform new model calibrations at each scale, all independent among themselves and from the original calibration. Finally, the results of these calibrations are contrasted with the upscaled outputs and the native-resolution results in
Section 3.4.
2.1. FEST-EWB
The FEST-EWB (Flash-flood Event-based Spatially-distributed rainfall-runoff Transformation Energy–Water Balance) model is a distributed hydrological energy–water balance model [
38]. It represents the step forward from the FEST model [
41,
42]. FEST-EWB has produced valuable ET estimates across all sorts of scales: from field to agricultural district [
43,
44,
45] and river basin scale [
46].
FEST-EWB solves, at the same time, the energy and water mass balance equations for each pixel in its distributed pattern. The solution to this system of equations is found iteratively by employing the Representative Equilibrium Temperature (RET) as an internal variable. This is identified as the surface temperature that regulates the energy partition and the water mass fluxes. It can be seen as the model counterpart of the radiometric surface temperature. For applications in RS, it has been assumed that the aerodynamic temperature equals the land surface temperature [
47].
The core of the FEST-EWB equations system is described in Equation (1):
where the first equation refers to the water mass balance:
SM is the soil moisture (m
3 m
−3),
z is the relative soil depth (m) and the water mass fluxes (mm h
−1) are
P for the precipitation rate,
R for the runoff flux,
PE for the drainage flux and
ET as the evapotranspiration rate. The second equation relates the energy balance, with
W (J m
−2) enclosing the energy storage terms, and the energy fluxes (W m
−2):
Rn as the net radiation,
G as the soil heat flux,
H as the sensible heat and
L for the latent heat. The “
s” and “
c” subscripts that follow the sensible and latent heats refer to the “soil” and “canopy” components of the fluxes, respectively. All these terms of the system are functions of the input soil and vegetation parameters.
Although the FEST-EWB is capable of performing long-running hydrological simulations, the analysis performed in this study is composed of separate daily simulations for the flight overpass dates, as the necessary meteorological data are available only on the flight overpass dates. FEST-EWB input data include both stationary and time-varying information. Soil and terrain parameters belong to the former, and include descriptors of the soil water motion (e.g., hydraulic conductivity, pore-size index, bubbling pressure, residual and saturation water contents, active soil depth) and geo-morphological characteristic of the basin (e.g., aspect, elevation, slope). Vegetation (e.g., plant height, vegetation fraction and leaf area index) and meteorological (e.g., rainfall, incoming shortwave radiation, air temperature and relative humidity) parameters, on the other hand, mostly belong to the “time-varying” category. Minimum stomatal resistance (depending on the specific plant) and soil resistance to evaporation (depending on the soil type) are considered to be fixed with time. Finally, all input data can be provided either as single-valued or with their own spatial distribution, depending on data availability.
Calibration and Validation Procedure
The traditional calibration procedure for hydrological models features point-wise measurements of the calibration variable, like river discharge (e.g., for flood management purposes) or soil moisture (e.g., for agricultural applications) collected at specific points, which are limited in number and only represent a part of the basin response to the hydrological cycle. The FEST-EWB hydrological model, on the other hand, allows a pixel-by-pixel calibration, particularizing the calibration parameters with a spatial heterogeneity derived from the calibration variable patterns [
46,
48,
49].
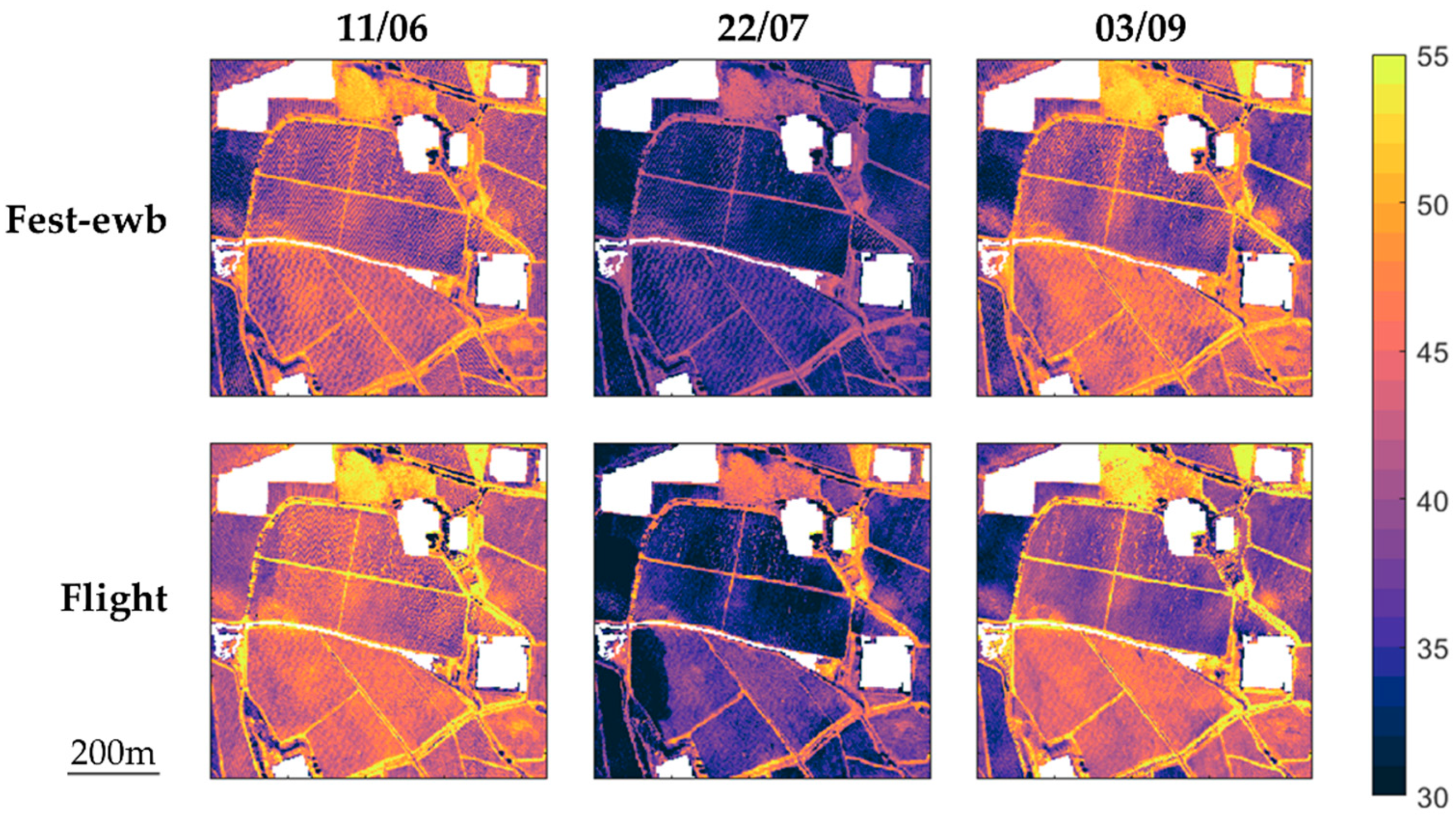
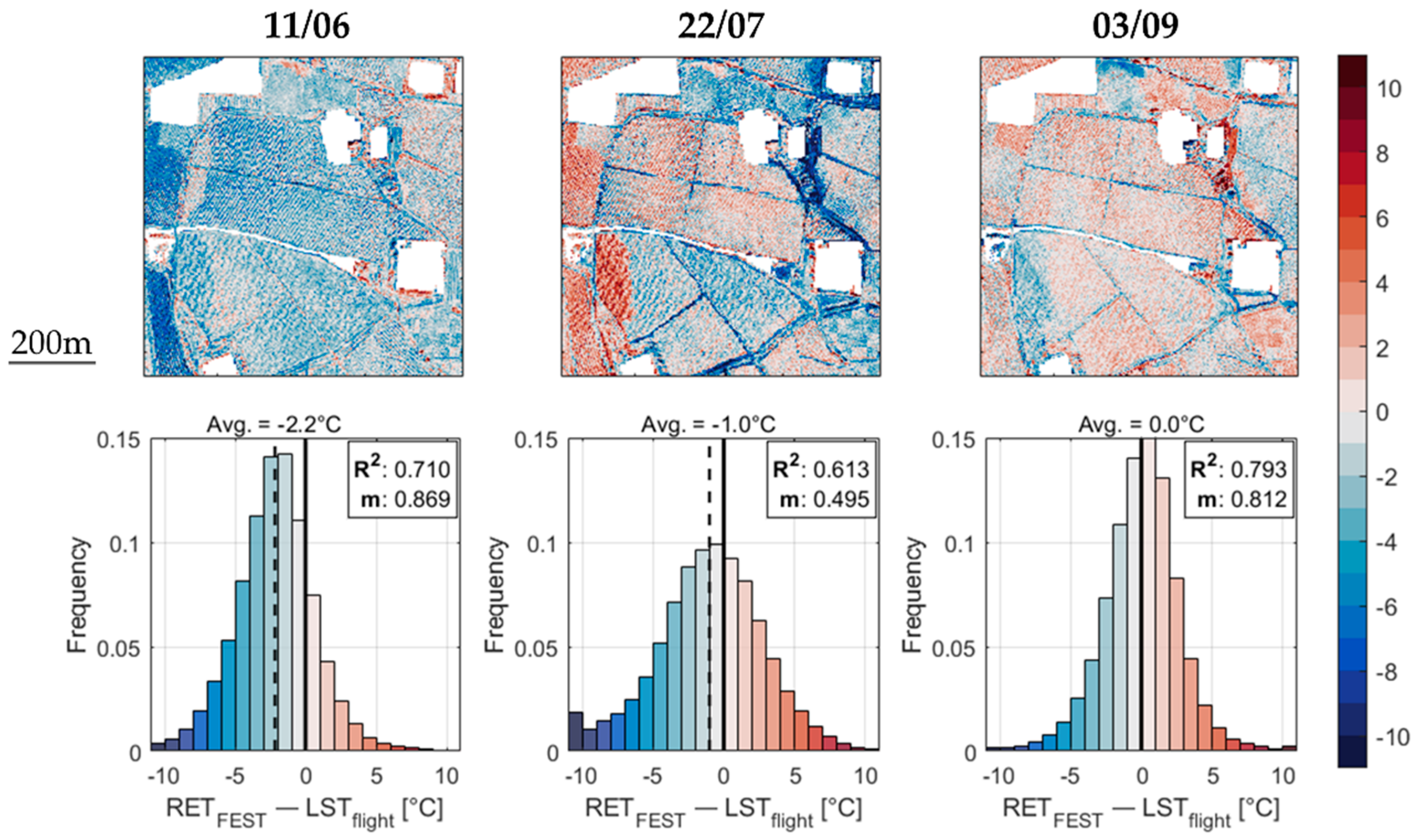
The calibration of the FEST-EWB distributed hydrological model has been performed by means of a pixel-by-pixel comparison between the modelled Representative Equilibrium Temperature (RET) and the remotely-sensed Land Surface Temperature (LST). The calibration process is regulated by the pixel-by-pixel minimization of the average model error, defined as the objective function O (Equation (2)).
where
n stands for the total number of calibration dates selected. The pixel-by-pixel approach of the calibration process allows to refine the spatial heterogeneity of the calibration parameters involved.
In previous applications of the model [
48], four main parameters have been found to be critical for the calibration process: the Brooks–Corey (or pore-size distribution) index, the saturated hydraulic conductivity, the soil depth and the minimum stomatal resistance. Of these, the first three are mainly related to water geodynamics, while the latter is more closely connected to the ET process. As the daily simulations are performed in summer days with no precipitation or irrigation, offering a restricted time window, they are not enough to capture the water dynamics influenced by the former three parameters detailed above, thus decreasing their relative influence in the model performance for this particular application. Hence, it has been decided to calibrate the model working only on the minimum stomatal resistance, given its strong link to the energy partition mechanisms.
Furthermore, some preliminary analyses have shown that also the soil surface resistance (employed in the computation of the soil latent heat) needs to be considered in the calibration. This decision is motivated by the fact that highly heterogeneous canopy structures, like a vineyard’s, create complex air and heat patterns in the zone between the soil surface and canopy roof. These complexities are strongly influenced by the unvegetated areas between the vine rows, which are clearly visible to the model thanks to the high data resolution (1.70 m against the inter-row space of 2.40 m). Thus, the role of the non-vegetated areas among the vine rows needs to be properly addressed by its own soil resistance term in the energy balance equation.
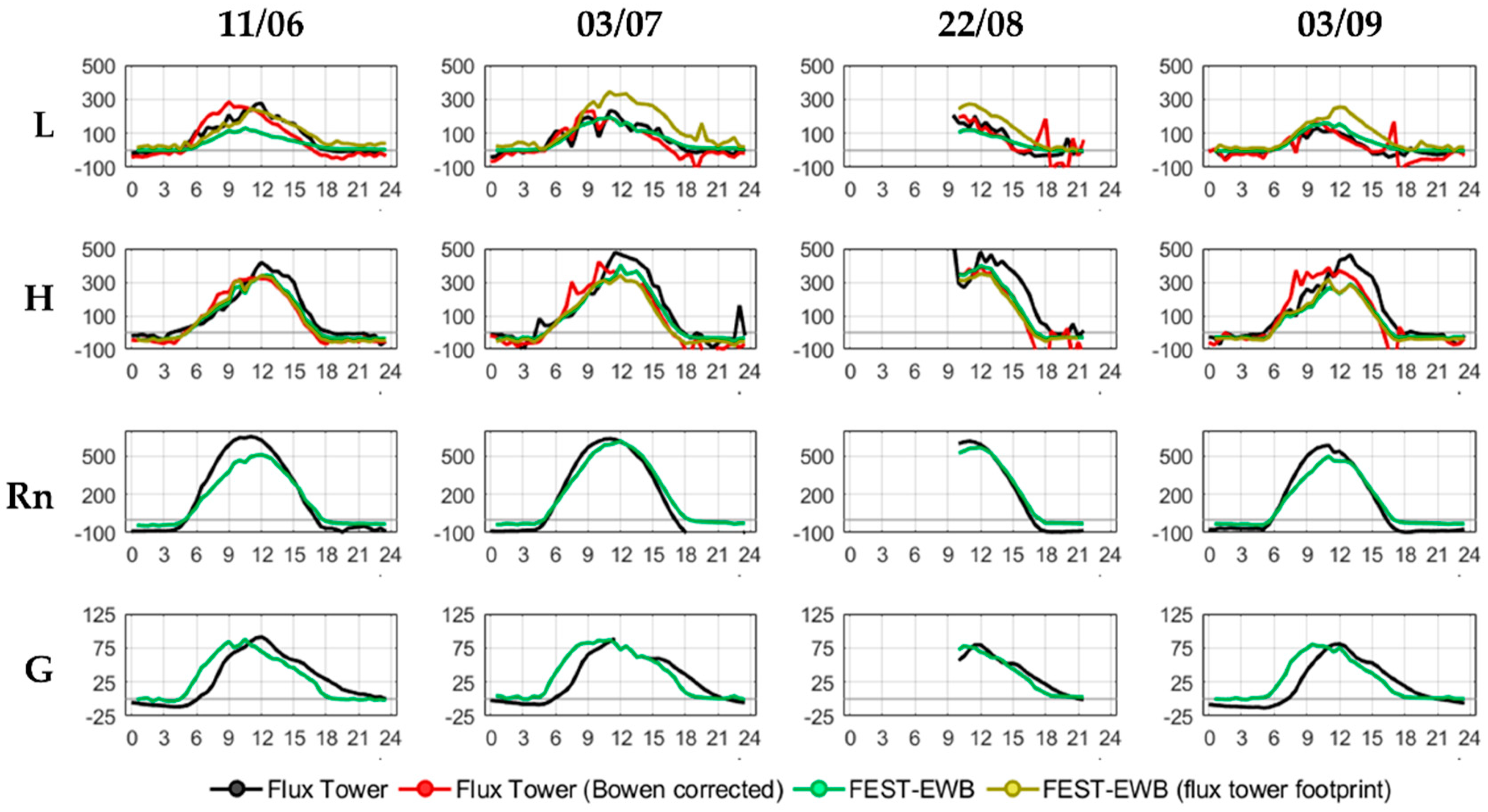
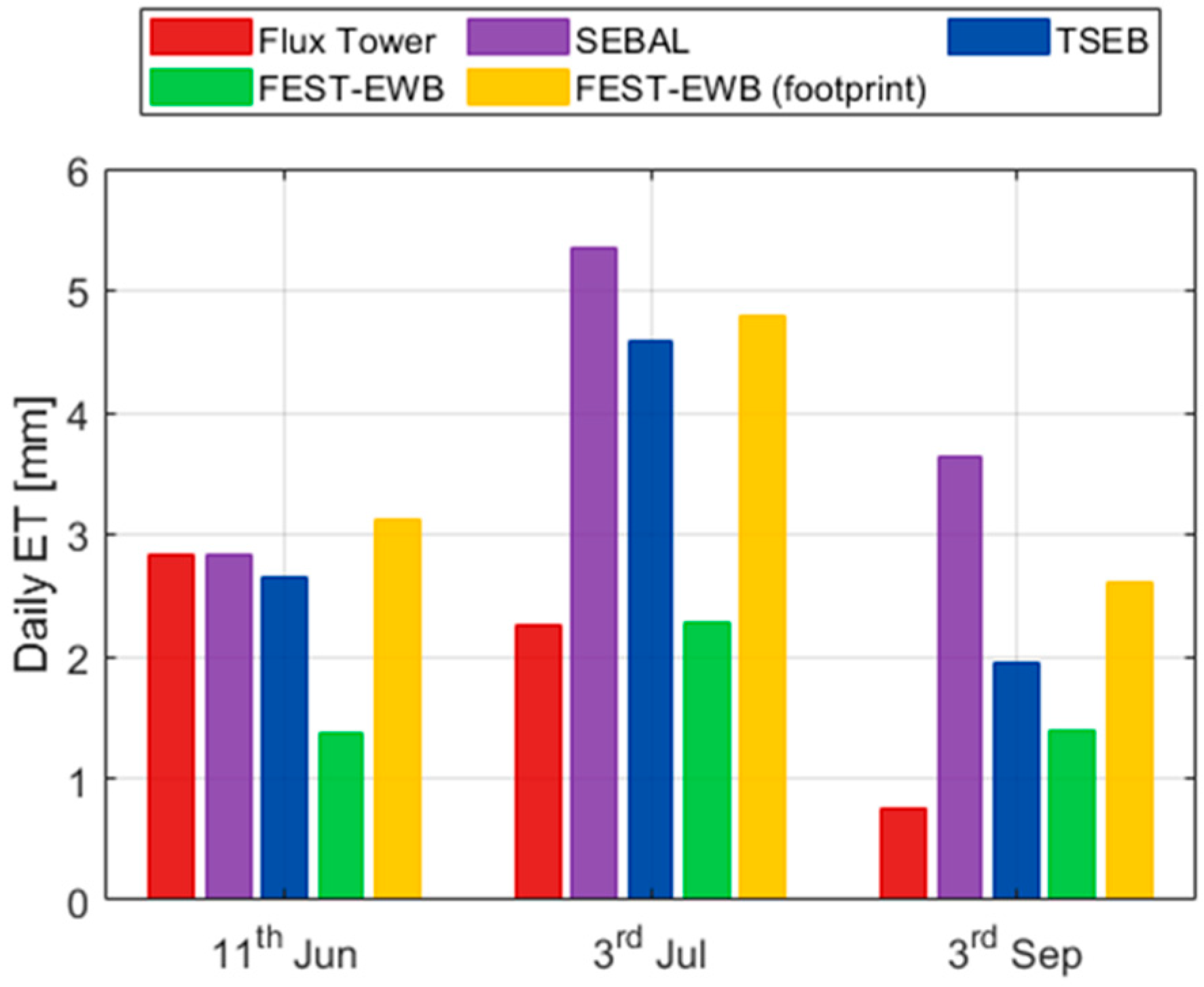
The possibility to calibrate the model using LST and validate it using energy fluxes obtained from an independent source allows a synchronous calibration/validation process. All energy fluxes are involved in the validation process: Net Radiation, Soil Thermal Flux, Sensible Heat and Latent Heat.
In the validation process are also included, as a reference, two widely-used and established energy models: SEBAL [
23] and TSEB [
10]. They belong to two distinct categories of energy balance models: single-source and two-source, respectively [
50]. The former portrays each pixel as a homogeneous area, with a single energy balance equation (Equation (3a)) where the Latent Heat can be obtained residually after obtaining the Sensible Heat as a function of the radiometric/aerodynamic temperature T
OH [K] and the aerodynamic resistance R
AH [s m
−1] (Equation (3b)).
The two-source models, such as TSEB, partition the energy balance into two distinct equations, one referring to the non-vegetated (Equation (4a)) and the other to the vegetated fraction (Equation (5a)) of the given area. Sensible Heat exchanges are differentiated through a transition zone at air canopy temperature
TAC [K], before being summed to gather the overall flux from the pixel. Latent Heat from the canopy (
LC, W m
−2) is obtained from potential-state formulations, such as Priestley-Taylor’s [
51], while its bare-soil counterpart (
LS, W m
−2) is obtained residually.
Being the FEST-EWB structure somewhere in between these opposite approaches, these models have been considered in the analysis in order to provide a well-established reference for the FEST-EWB performance. The results used for the comparison are provided by [
39], working on the same input data as those employed for the FEST-EWB runs.
2.2. Scale Analysis
The original data employed in this study are obtained by airplane flight and are characterized by a spatial resolution of 1.7 m, relatively high in the field of agricultural applications of remote sensing [
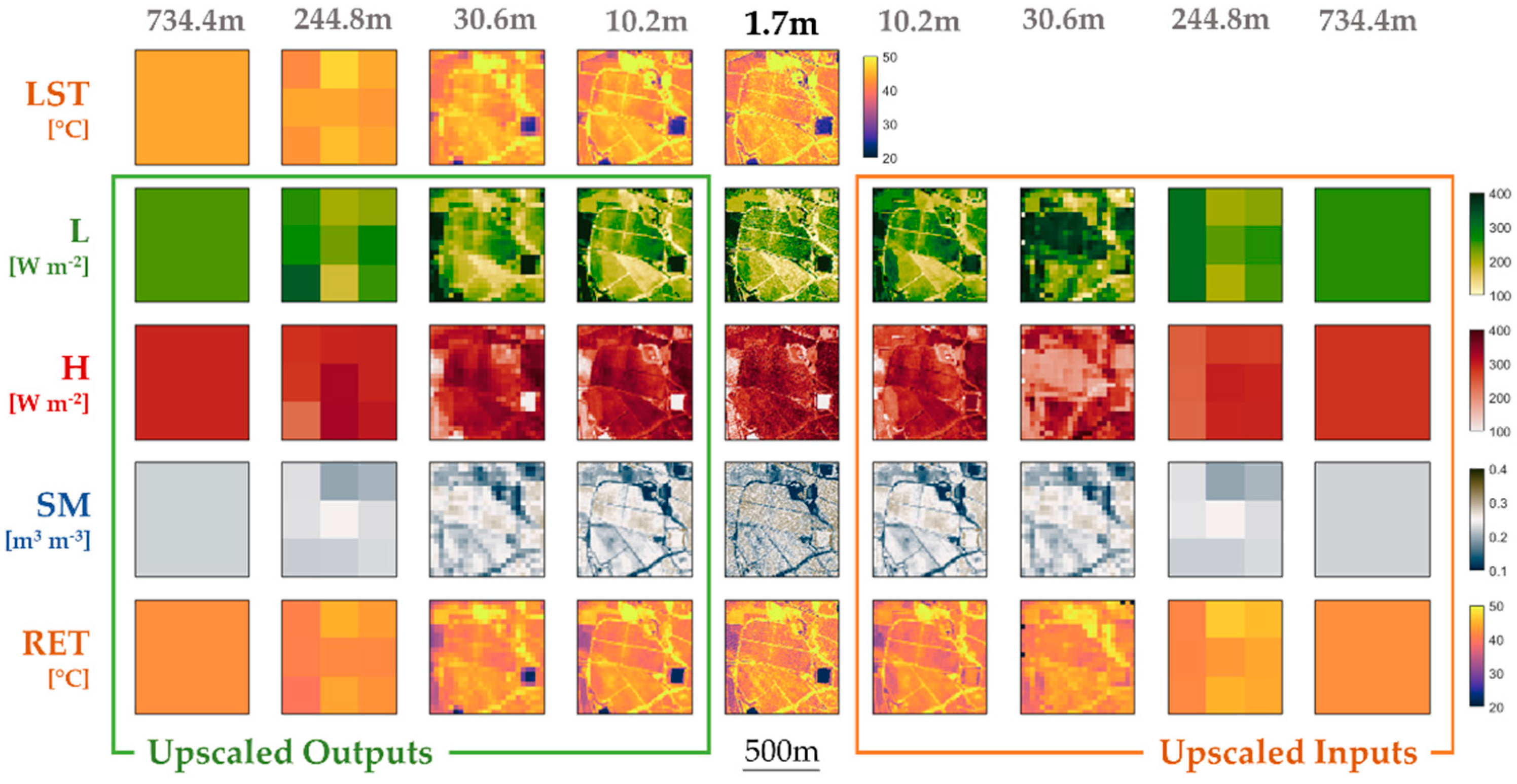
52]. The importance of spatial resolution has been tested on the FEST-EWB through scale analysis (
Figure 1). Firstly, the model outputs (latent and sensible heats, soil moisture and representative equilibrium temperature) have been upscaled to some specific spatial resolutions (
Section 3.2). Then, the input data have been aggregated to the same scales and fed to the model, which is calibrated anew for each spatial resolution employing the same calibration function of the highest-resolution calibration (
Section 3.3). The model results, either originated from the upscaling of the native-resolution results or after the model calibration employing upscaled input data, have then been compared.
The scales chosen for the analysis have been selected by similarity with those of some common satellite products: 10 m for Sentinel-2; 30 m for Landsat multispectral; 250 m for MODIS Visible and 1000 m for MODIS Thermal. To avoid reprojections that could alter the original data, the target scales are picked among the multiples of the native scale (1.7 m): 10.2 m for similarity with Sentinel, 30.6 m with Landsat, 244.8 m for MODIS Visible and 734.4 m (the total extension of the area) for MODIS Thermal.
The upscaling has been performed through simple averaging of the original data to the target resolutions. The process is detailed in the following, as a nominative example, for the production of the 10.2 m upscaled product. The ratio (6:1) between the target (10.2 m) and native (1.7 m) spatial resolutions indicates that any target pixel covers 36 (6 × 6) native pixels. The value to assign to the target pixel is obtained as the average of the 36-pixel sample. For each sample, also the standard deviation is retained as an indirect measure of the pixel heterogeneity. Thus, for each final product, both an average and a standard-deviation map are stored. The process is repeated, always starting from the native 1.7 m spatial resolution, for all the scales involved in the analysis.
2.3. Case Study and Data Overview
The study area is the experimental vineyard field of the “Tenute Rapitalà” farm in the territory of Camporeale (Sicily, Italy). Data for this study have been collected during the June–September 2008 “Digitalizzazione della Filiera Agro-Alimentare” (DIFA) field campaign described in [
39,
40].
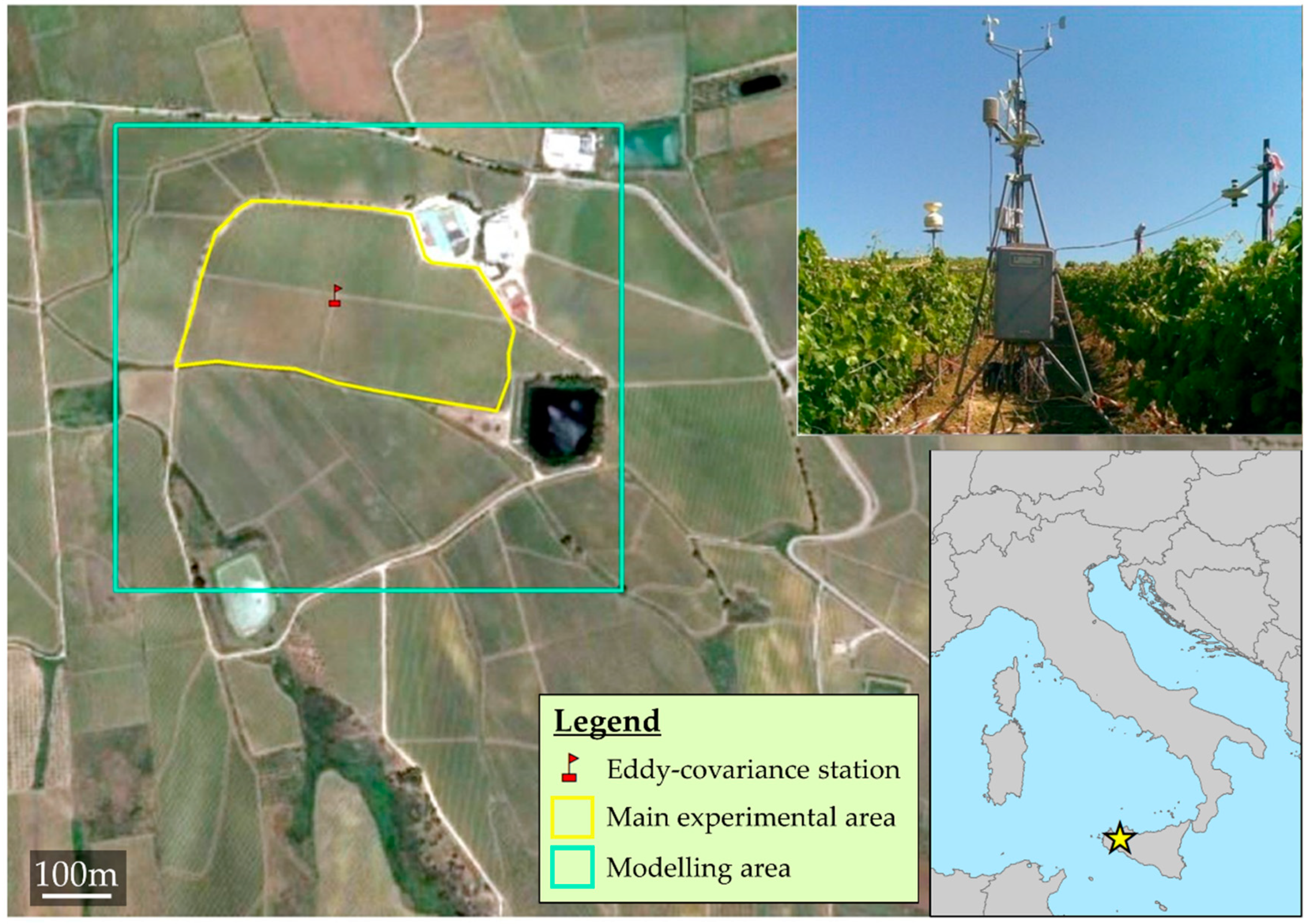
The case study is shown in
Figure 2. The cyan square identifies the modelling area, while the central yellow-bordered area identifies the main experimental field, composed of four sectors separated by two cross-positioned paths. This main area hosts the eddy covariance station (photo provided in the upper-right corner) and is thus the main focus for the comparisons with its data. The vineyards are organized in rows 2.4 m apart; in each row, the single plants are positioned every 0.95 m, resulting in a global plant density of 4386 plants per hectare. The terrain shows a mild slope (<10%), oriented towards S-SW. The soil texture is classified as loam (20% clay, 29% silt and 51% sand), with 1.7% organic content. Residual Water Content (RWC) is estimated at 0.04 m
3 m
−3, whereas Saturation Water Content (SWC) is estimated at 0.45 m
3 m
−3 [
53]. Drip irrigation is the main irrigation practice for the area.
2.3.1. Airborne Proximal Sensing Data: Acquisition and Radiometric Calibration
Five remote sensing acquisitions have been carried out during the summer of 2008, using the airborne platform SKY ARROW 650 TC/TCNS with a sampling height around 1000 m above ground level. A multispectral Duncantech MS4100 camera operating in the 767–832, 650–690 and 530–570 nm bands has been used to retrieve the visible (VIS) and near-infrared (NIR) images; a Flir SC500/A40M camera, working in the 7500–13,000 nm band, provided the thermal infrared (TIR) images. This distinction resulted in a different nominal pixel resolution for the VIS/NIR data (0.7 m) and the TIR data (1.7 m). The original data have been aggregated at 1.7 m using a pixel aggregate method. Thus, the 1.7 m spatial resolution is assumed as reference resolution for scale effects analyses.
The flights were been carried over in 5 days in 2008: 11th June (DOY 163), 3rd (185) and 22nd (204) July, 22nd August (235) and 3rd September (247). These days were all characterized by optimal meteorological conditions to improve the quality of the data collection process.
Further details on the thermal image pre-processing are discussed in
Appendix A.
Leaf Area Index (LAI) and vegetation fraction (fV) data have been gathered employing LAI-2000 Plant Canopy analyzer, an optoelectronics instrument. Plant height information has been obtained from NDVI data by means of an empirical relation calibrated in situ.
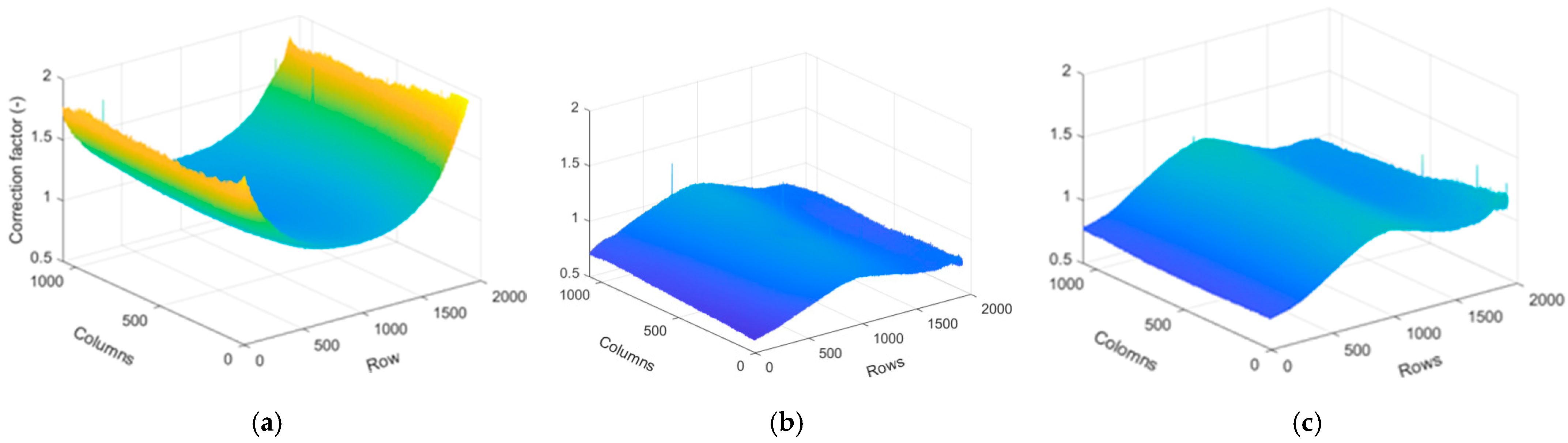
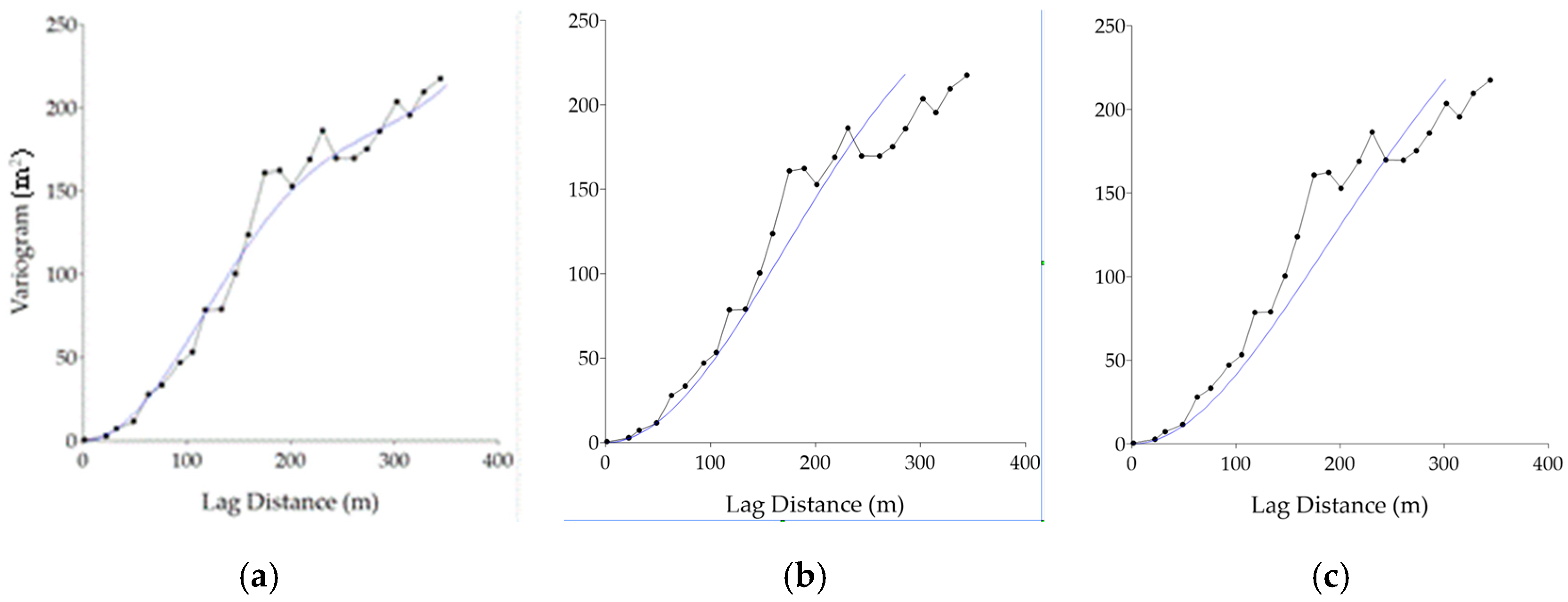
2.3.2. Digital Elevation Model: GNSS Acquisitions and Geostatistical Analysis
The digital elevation model (DEM) was obtained by interpolating orthometric altitudes measured via GNSS (Global Navigation Satellite System). A GNSS receiver, namely a Topcon GMS-2, was mounted on a tractor allowing characterizing the study area altitude by running up and down along the middle of all the vineyard lanes.
A simple Differential GPS (DGPS) provided position solutions with accuracies comparable to the spatial resolution of the images (≈2 m).
Data were acquired on the 17th June (DOY 169) between 7:45 and 12:45 UTC at 5 s time steps, for a total amount of ≈3037 positions. Of these, 136 positions were removed to missing differential correction.
Further information on this pre-processing step is provided in
Appendix B.
2.3.3. Eddy Covariance Data
A flux tower was located at the center of the experimental field for the entire duration of the monitoring period. The station is equipped to measure also air temperature and humidity by a sensor placed at 2.75 m above ground and a pluviometer, with 0.2 mm accuracy, installed at 2 m above ground. The eddy covariance setup included a CSAT3 sonic anemometer and an open-path LICOR-7500 IR Gas analyzer operating at 3.40 m above ground and with 20 Hz measurement frequency, although the final data are provided with the 30 min time step common for these kinds of set-ups. The turbulent fluxes exchanges have then been estimated from the vertical wind covariance with several parameters: the air temperature (to determine the sensible heat), the water vapor density (for the latent heat) and the CO
2 density (for the carbon dioxide flux). A detailed description of eddy covariance data analysis is provided in [
40].
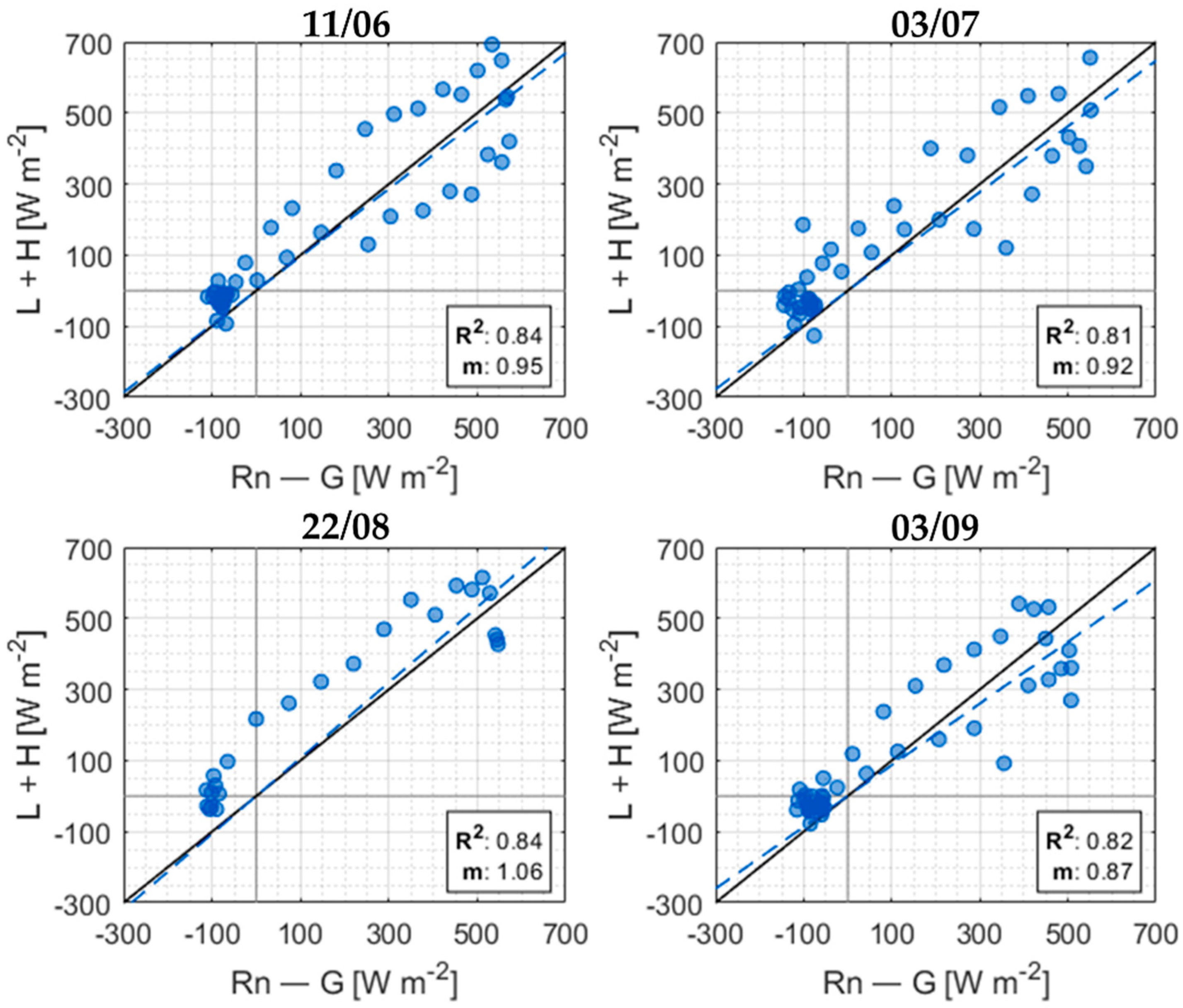
At each time step, the four components of the energy balance are then available: Net Radiation (Rn), Soil Thermal Flux (G), Latent Heat (L) and Sensible Heat (H). The closing of the energy balance is summed up in the average angular coefficient of the energy-balance interpolators, estimated at 0.95, together with the data dispersion value, averaging 0.83. This is consistent with the fact that, when measured with eddy covariance stations, the energy balance is not closed by definition, as the available energy is always higher than the turbulent fluxes (as well known in literature: [
54,
55]). More insight into the energy closure plots for each measurement day is provided in
Appendix C. Due to the nature of surface energy balance models, which are based on the closure of the energy budget, the eddy data must be corrected by distributing the error among the turbulent fluxes according to the Bowen ratio to force the closure of the energy balance [
56]. However, because of some low-quality long-wave radiation data, the corrected Latent and Sensible Heats may become out of phase with respect to their “expected” peak time. This issue will be explored more in depth in
Section 3.1.2.
Data measured from eddy covariance stations generally do not refer to the single point in space in which the instrument is placed, but are influenced by the aerodynamic conditions of the atmosphere bottom layer in which it is located. An approximate analytical model has been developed [
57], to simulate the measurement distance of an instrument for given atmospheric conditions. This model has then been expanded in a bidimensional formulation to compute the areal footprint of the eddy covariance measurement [
58].
Local micro-meteorological conditions determine how wide the area that contributes to the actual measure is. For our case study, average day-time conditions determine that 90% of the eddy footprint area covers 10 ha. According to the data spatial resolution, these numbers can mean that a footprint computation is required to aptly simulate the measurement performed by the instrument. Lower resolutions cover most of the footprint with only one pixel, meaning that the simple pixel value is enough for the comparison with the eddy station measurements.
2.3.4. Global Data Overview
The information about the employed data is summed up in
Table 1.
Energy fluxes information was unavailable for 22nd July, disqualifying it as a feasible date for the validation step. Meteorological and energy fluxes data for 22nd August were available only for the 10:00–21:30 time range, implying that the conditions at the time of the flight overpass (09:15) could not be simulated using FEST-EWB. This means that this date could not be included in the calibration. Finally, data from 3rd July have been excluded from the calibration step because of incongruencies in the reported flight time with usual registered LSTs. Turbulent flux data, on the other hand, are employed in the validation process. As already stated in
Section 2.1, data are available only on single flight dates. Because of this restriction, no continuous model run could be performed. Instead, single daily simulations were executed.
4. Discussion
Numerous doubts regarding the scale issues with energy fluxes involve the common assumption of pixel homogeneity in most surface energy balance models [
31]. These concerns revolve around the modelling of non-linearities, which do not cope well with the (often) linear aggregation processes. Non-linearities are all the more evident for heterogeneous pixels. Again, Ref. [
31] focused on the dependency of modelling roughness lengths (used to compute aerodynamic resistances) on spatial resolution, postulating that all models following the Monin–Obukhov Similarity Theory (MOST) face this challenge.
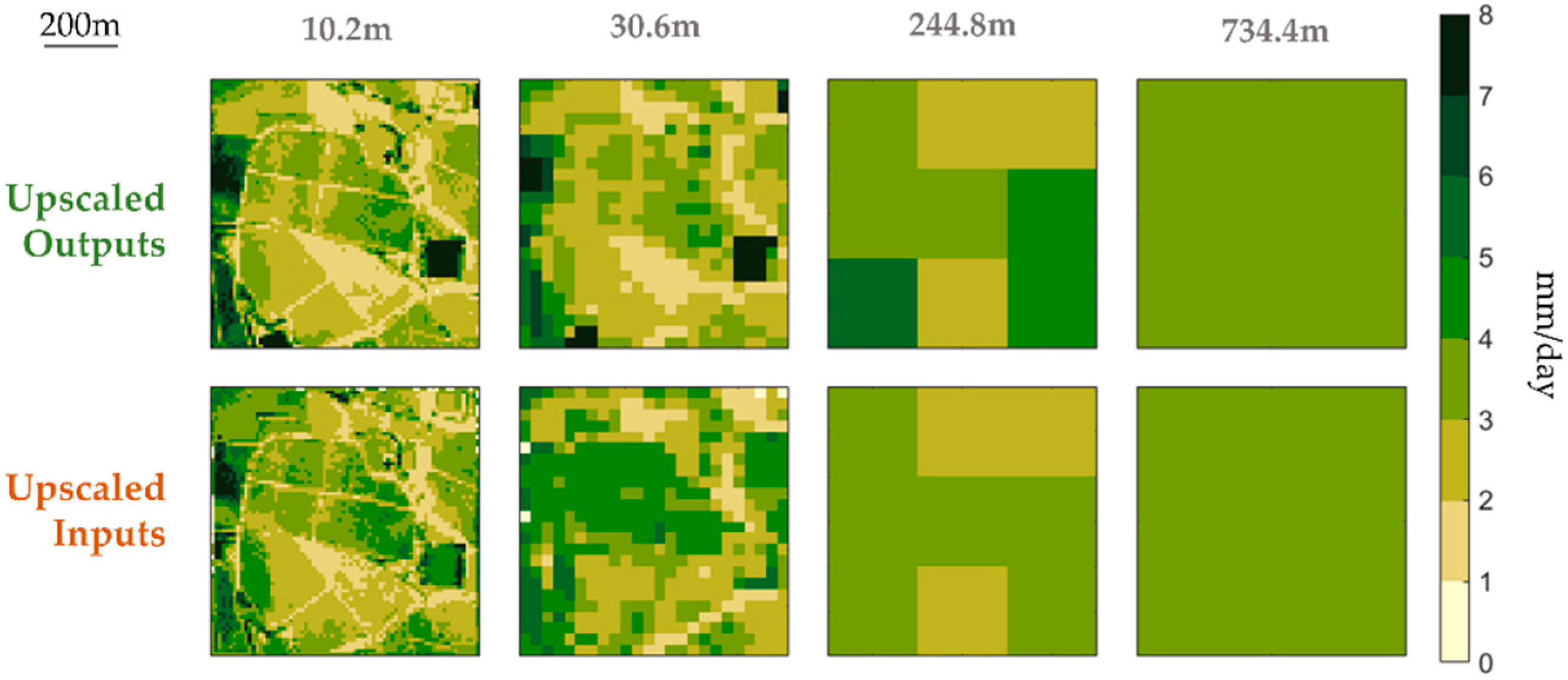
The scale analysis shown in this study aims at testing the FEST-EWB sensitivity to modelling non-linearities across common spatial resolutions for a remote sensing product. Two approaches are contrasted: aggregating model results obtained at high resolution (Upscaled Outputs approach, or “UO”); aggregating model inputs before calibrating the model anew (Upscaled Inputs approach, or “UI”). Faced with this double approach, the FEST-EWB model has shown consistent results.
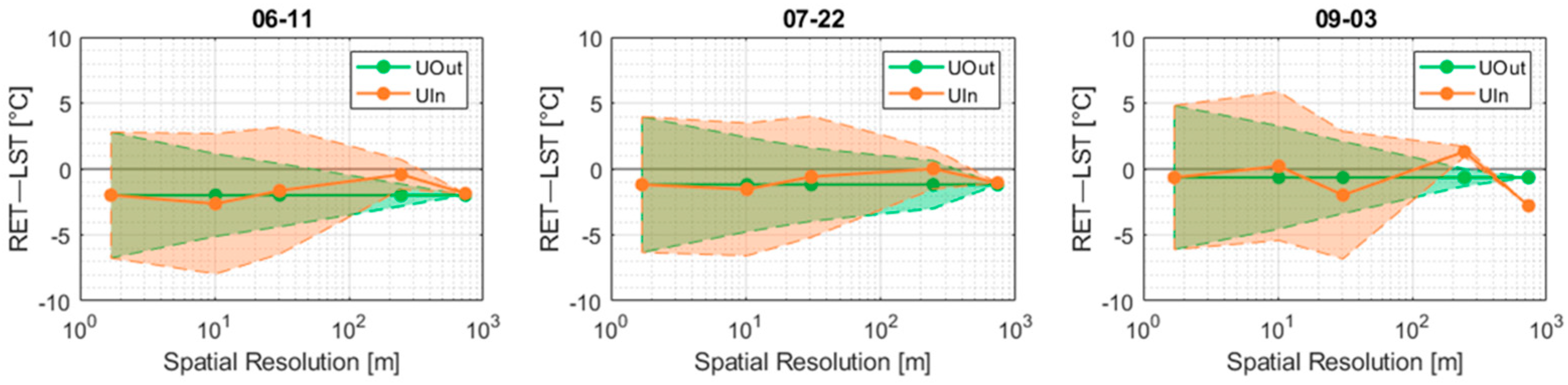
In the calibration phase (
Figure 10), the temperatures are comparable between the two approaches. The calibration process, employing the same calibration functions for both approaches, was demonstrated to be only slightly hampered by the spatial resolution. This is all the more impressive provided the loss in spatial information brought on by the upscaling process, both in the actual results for UO and in the input data for UI, as testified by
Table 6. Although data inputs become up to three-fourths less diverse, the model still manages, with the appropriate calibration, to provide low temperature biases. The aggregated fluxes (
Figure 9) reflect this decreased data diversity with less heterogeneous UI latent and sensible heats with respect to their UO counterparts.
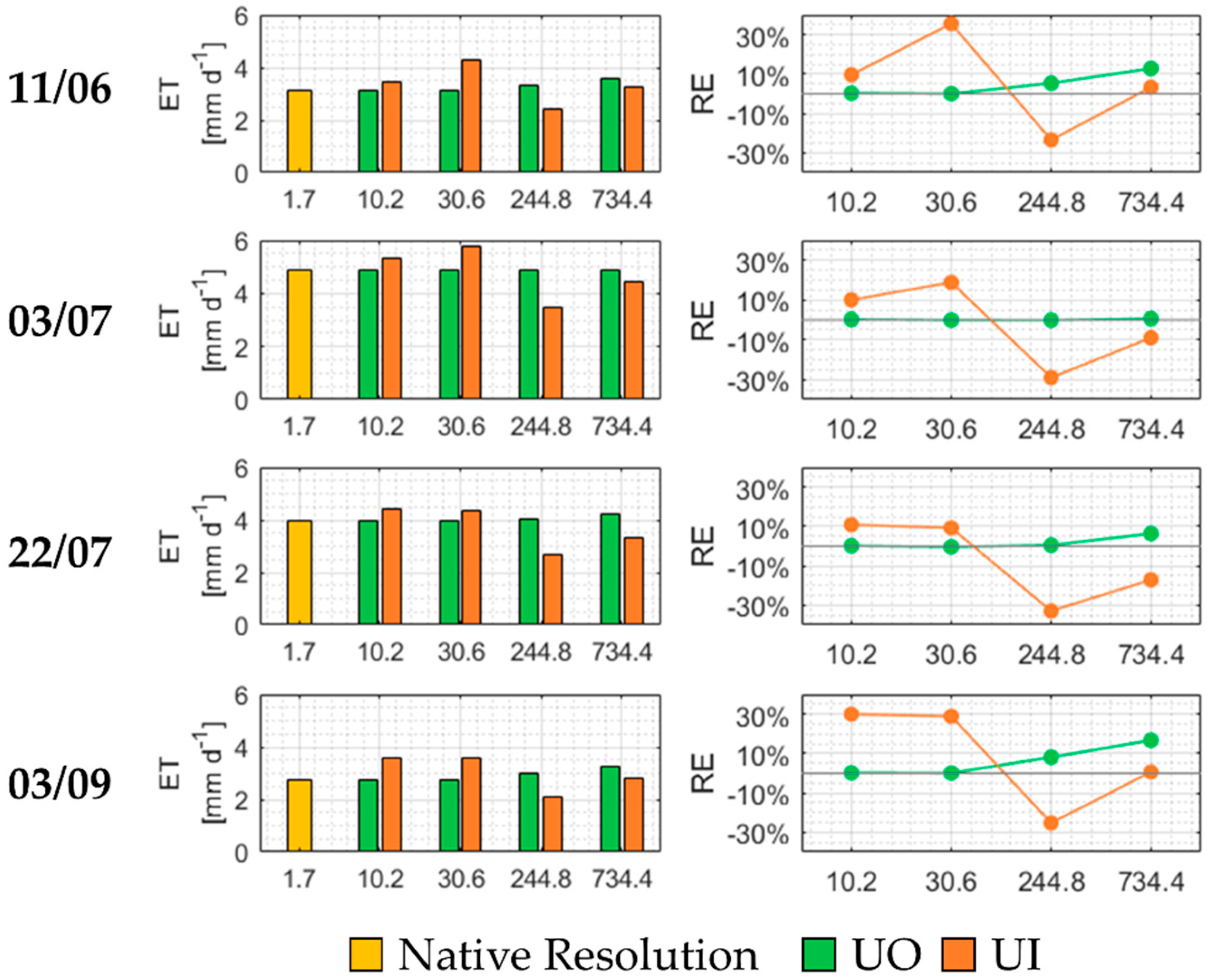
To provide an operative estimate for the model performance in coarser-resolution scenarios, ET global estimates for the vineyard area are computed with both approaches and compared to their high-resolution counterparts. This adaptation is detailed in
Figure 11, with the two different scale evolutions for the UO and UI results. While the simple averaging approach provides a monotonous relative error increase in the UO scenario, the independent calibrations set a more erratic error distribution for the UI approach. Clearly, the UI errors appear overall higher than the UO ones, in agreement with [
37]. They found that ET was better preserved with output upscaling than with input upscaling, as in the former case the coarser-scale ET relative error reached, at most, 28%, whereas in the latter it stretched just above 40%. The results of input upscaling for their work was obtained for a model (SEBS) which did not require calibration; probably for this reason, the upscaled-input ET showed a monotonously increasing error which is not the case for this study, as shown in
Figure 11. The overall error values are, however, in tune with what was found in this study.
Some further considerations are due for the UI results shown in
Figure 11. As the model is subject to a new calibration for each scale, low errors are theoretically possible even for coarse resolution, which is not the case for the UO results. However, as scales progress, fewer and fewer pixels cover the same area; in this case, only 1 pixel for the 734.4 m scale and 9 for the 244.8 m one. Fewer available pixels dramatically hinder the perks of employing a distributed hydrological model, as less parameter values can be tuned during the calibration process. Thus, while low relative errors are theoretically possible for coarse scales in the UI approach—as for the 11th Jun and 3rd Sep dates in this case, for the 734.4 m scale—the calibration process can provide worse results, as is the case for the 244.8 m scale.
Finally, some positive insights of high resolution data can be gathered by the ET spatial patterns shown in
Figure 12. The differences between the two scaling approaches seem quite in line with those of the averaged values discussed above. This is particularly true for the highest resolution of the scale analysis (10.2 m), the closest to the native resolution. As scales progress, some discrepancies emerge between the approaches, in particular for the medium-range spatial resolution (30.6 m), while coarser resolutions seem less affected. This is in line with the fact that 30.6 m is a critical resolution value not high enough to encompass large field portions (like 244.8 m) and not low enough to clearly distinguish the main features of the field (such as the bare-soil paths within the vineyard area, clearly visible at 10.2 m). In such mid-range resolutions, the model does seem to struggle in capturing the heterogeneity of the different contributions to the global ET.
5. Conclusions
The main focus of the analysis presented here is to evaluate the effect of spatial resolution on hydrological modelling when analyzing a particularly complex and heterogeneous area such as a vineyard. After the calibration of the FEST-EWB distributed hydrological model (at high resolution), a two-fold approach has been adopted: coarse-resolution temperature and evapotranspiration results of the model have been compared when either (a) obtained from a simple aggregation of high-resolution model results or (b) provided by the model following independent calibrations performed directly at the target scale. The reason for such a comparison was to determine how the model performed when employed in heterogeneous areas and with a low resolution. In particular, two main driving questions were: (i) does the model require high-resolution data to positively interpret heterogeneous areas, and (ii) can a high-resolution calibration help the model in interpreting low-resolution data?
Strikingly similar surface temperature distributions between output- and input-aggregated model runs prove that similar results can be obtained by the model independently of the input data resolution. This result markedly testifies to the model’s own robust adaptability to high-heterogeneity scenarios. A further insight is brought on by the ET results. Apart from minor differences, the global evapotranspiration of the vineyard is practically the same, whether it is computed from aggregated high-resolution data or low-resolution information. However, looking at relative errors, some discrepancies between the two approaches can emerge, linked to the difficulties of a distributed model calibration with few available pixels (as is the case for the coarser resolutions). An analysis of the ET spatial patterns reveals good adaptation for the highest resolution, while some difficulties emerge from mid-range resolutions, where surface singularities start to be mingled with the main vineyard pattern.
The overall flexibility of the model allows to obtain good ET estimates even employing low-resolution data, which are commonly more economic and easier to retrieve. From an agricultural water management perspective, this means being able to enforce a continuous and accurate control over the crop with moderate costs. However, spatial resolution of the available data is still a key parameter towards the final profitability of the results, with intermediate-resolution pixels appearing to cause the most issues.
Possible future developments of this study include: (a) performing a continuous, long-running simulation, in order to assess the amount of error propagation at the different scales; (b) testing the model performance and the analysis approach over different fields, both in terms of crop pattern and of boundary meteorological conditions; (c) stretching the limits of the scale analysis, by employing both higher (below 1 m, using UAVs or remote sensing data, e.g., from the DigitalGlobe constellation) and lower (above 1 km, although a larger field would be required to minimize disturbances from nearby areas) resolutions.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













