1. Introduction
Near real-time and statistical information about flooded areas is essential for several public services, i.e., emergency, rescue, recovery, spatial planning, habitat monitoring, and adaption to climate change. Satellite remote sensing can provide timely and operational data as well as statistical spatial information about inundated areas covered with water. Two types of satellite imagery are available for monitoring surface flood dynamics: optical and synthetic aperture radar (SAR). Optical satellite remote sensing can only be applied in cloud-free situations. However, floods often occur during long-lasting periods of precipitation and persistent cloud cover. Therefore, SAR systems are usually a preferred tool for the monitoring of floods from space. A smooth open water surface is characterized by a low SAR backscatter, and this difference in backscatter response generally allows flood mapping [
1]. Over the last decade, various methods for deriving the flood extent from SAR data have been proposed [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18]. Based on summaries by Martinis et al. [
18] and Liang and Liu [
8], the most commonly applied methodology for flood mapping from a single image is histogram thresholding, which can be used in combination with different image processing approaches. Temporal change detection techniques [
19,
20] and coherence analysis [
21] have also been used for open water mapping. However, temporal change detection approaches require two images and can therefore be limited by the temporal coverage of satellite imagery. To improve flood mapping accuracy, the advantages of ancillary data, such as the DEM (digital elevation model) derived HAND (height above the nearest drainage) index and the catchment derived DIST (distance from drainage) index as well as land use map, have been demonstrated in several studies [
17,
18,
20,
22]. Most of the proposed approaches for flood mapping are semi-automatic. A fully automatic methodology that integrates split thresholding and fuzzy logic classification has been proposed and applied by Martinis et al. [
18] for the processing of TerraSAR-X, and by Twele et al. [
23] for the processing of Sentinel-1 (S1).
Recent studies by Grimaldi et al. [
24] and Tsyganskaya et al. [
25] have summarized the approaches of flood mapping under the forest canopy. The study by Grimaldi et al. [
24] shows that the most commonly applied method for the detection of flooded areas under vegetation is the identification of increased backscatter values compared to other objects. The penetration depth of the SAR signal into vegetation is higher for longer wavelengths, so the use of the L-band has been recommended [
26,
27,
28]. However, several studies [
20,
29,
30] have demonstrated the capabilities of C-band and X-band data in the identification of flooded vegetation, especially in the case of sparse forests and leaf-off conditions. Co-polarized signals (HH or VV) are preferred over cross-polarized signals for mapping water under vegetation. Studies have indicated that the use of HH-polarization leads to more accurate results compared to VV-polarization [
31,
32]. Moreover, the use of polarimetric decomposition and/or interferometric SAR coherence has been utilized for the mapping of floods under vegetation [
33]. However, the availability of full polarimetric data is often limited in terms of spatial extent and temporal coverage.
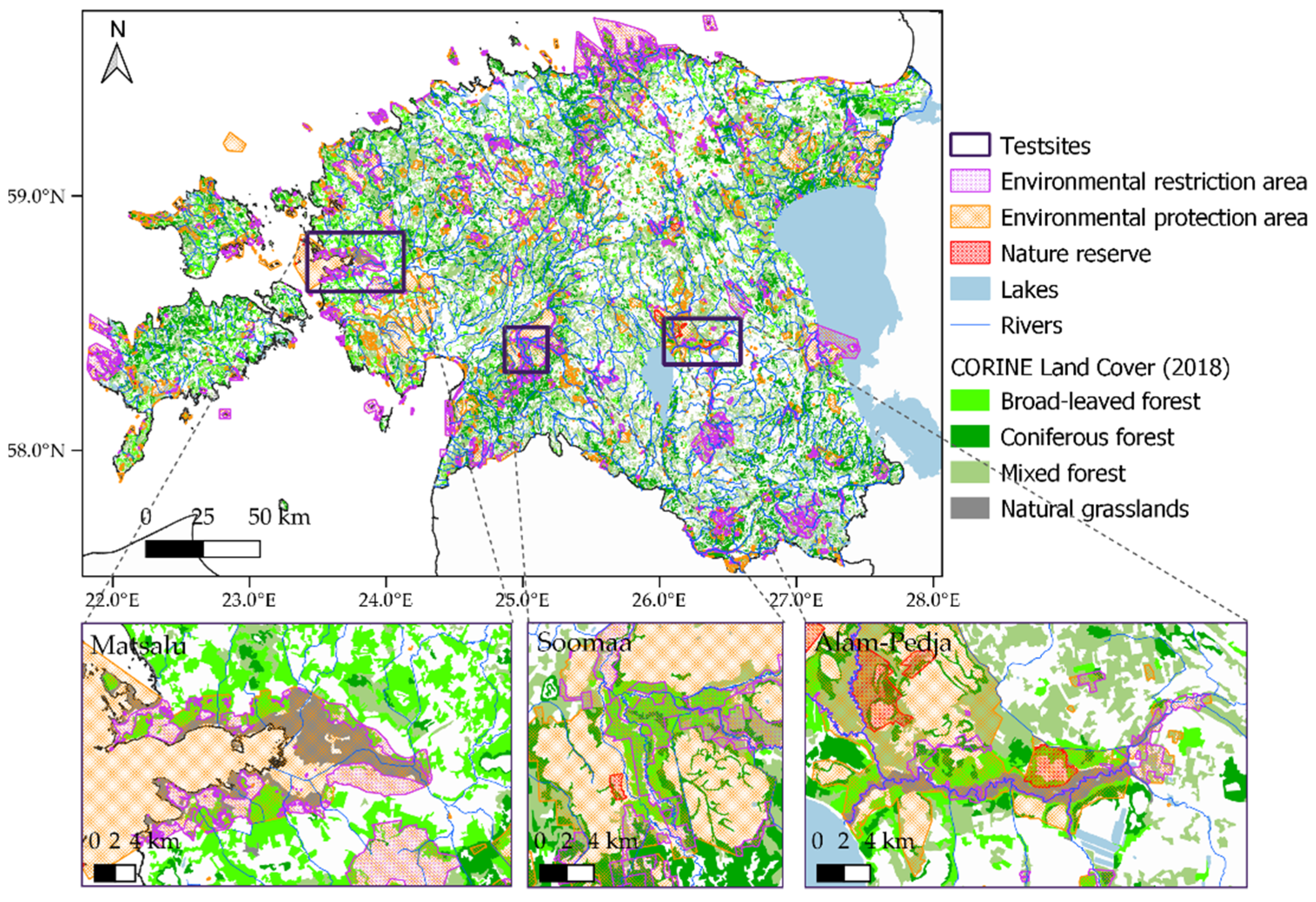
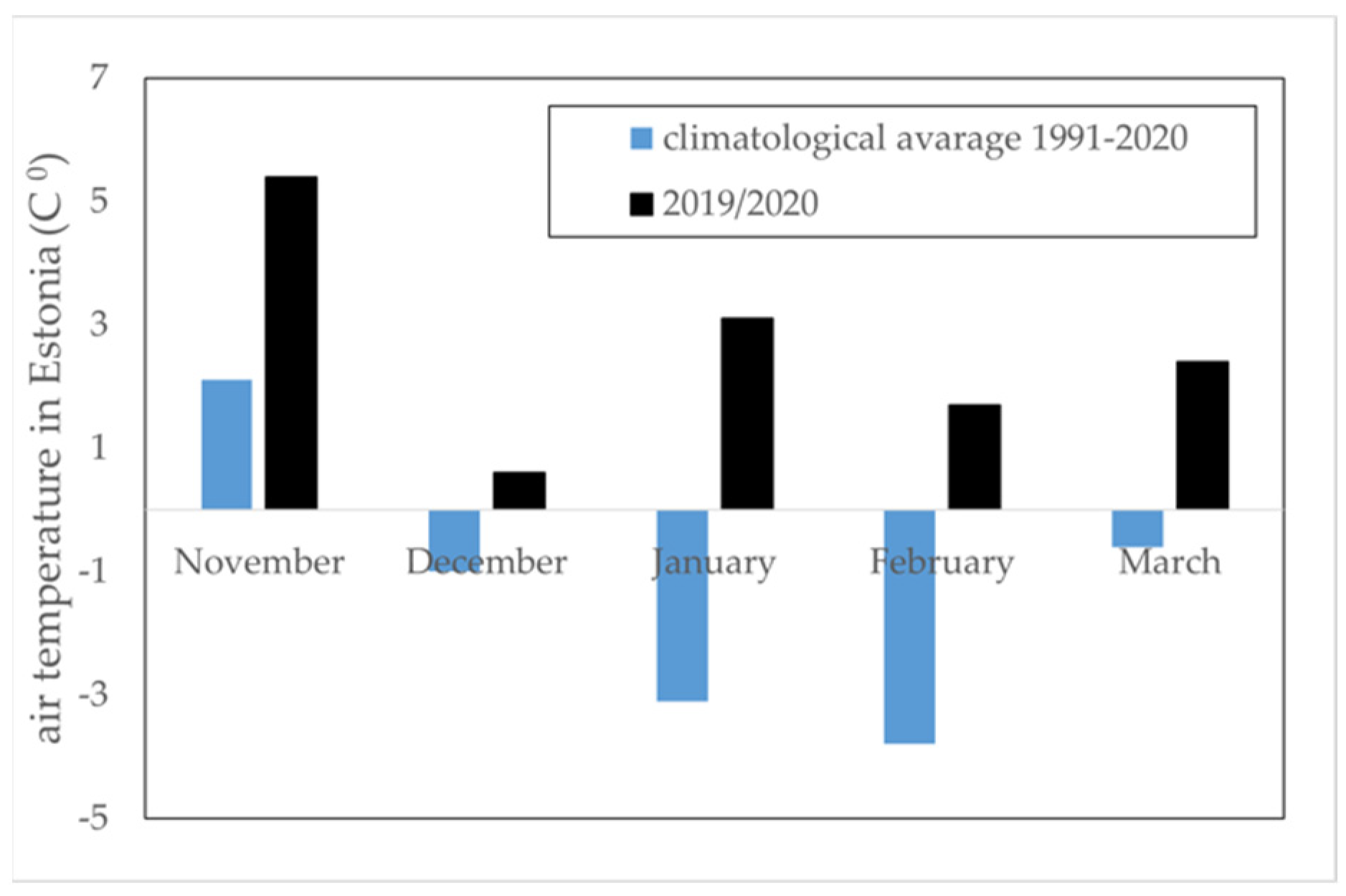
Estonia is known for its large seasonal riverside areas that are flooded over annually. The surface area of the Estonian floodplain grasslands with a high nature conservation value is estimated to be 16,000 hectares. According to the EU Habitats Directive, northern boreal alluvial meadows (habitat type code 6450) are grasslands situated on the banks of large rivers, in sections with slow flow, which are frozen in the winter and flooded in the spring–summer period. However, extremely warm winters in Estonia during the last five years have also caused large flooding during winter [
34]. Extreme changes in inundation extent, depth, and duration define phonological patterns, animal migration routes, and human living spaces [
35]. Therefore, it is important to monitor the temporal and spatial changes in flooded areas.
The boreal forest encompasses approximately 30% of the global forest area and provides critical services to local, regional, and global populations. Communities benefit from ecosystem services provided by forests for fishing, hunting, leisure activities, and economic opportunities [
36]. Countries such as Canada, Finland, Sweden, and Russia extract wood from boreal regions for their forest industries [
36]. Flooding causes disturbances in forest management, resulting in economic losses. The vulnerability of the forest ecosystem in a changing climate has been discussed in Gauthier et al. [
36] and Hari and Kulmala [
37]. Previous studies have expressed the importance of flood monitoring in areas with emerging vegetation for a comprehensive evaluation of the economic and environmental costs of floods [
38,
39,
40]. Recent mild winters in Estonia have affected the forest industry. Forest management is impossible due to unfrozen soils and floods [
41]. However, the spatial extent and duration of floods during the winter period in Estonia is still unknown.
At the European scale, two flood-monitoring services are provided. The (1) Copernicus Emergency Management Service (EMS) [
42] provides a free-of-charge mapping service in cases of natural disasters, man-made emergencies, and humanitarian crises throughout the world. This service can be triggered by request in the case of an emergency. The (2) Copernicus Land Monitoring Service (CLMS) provides a pan-European, high-resolution product known as Water and Wetness. This product shows the occurrence of water and wet surfaces over the 2009–2018 period. Thematic maps were produced for the years 2015 and 2018. These layers are compiled from multi-temporal high-resolution optical and radar satellite imagery [
43].
However, these services do not provide information about the inter-annual variability of water extent on the floodplains, nor information about the flooded forest areas. Therefore, the current study was initiated with the following aims:
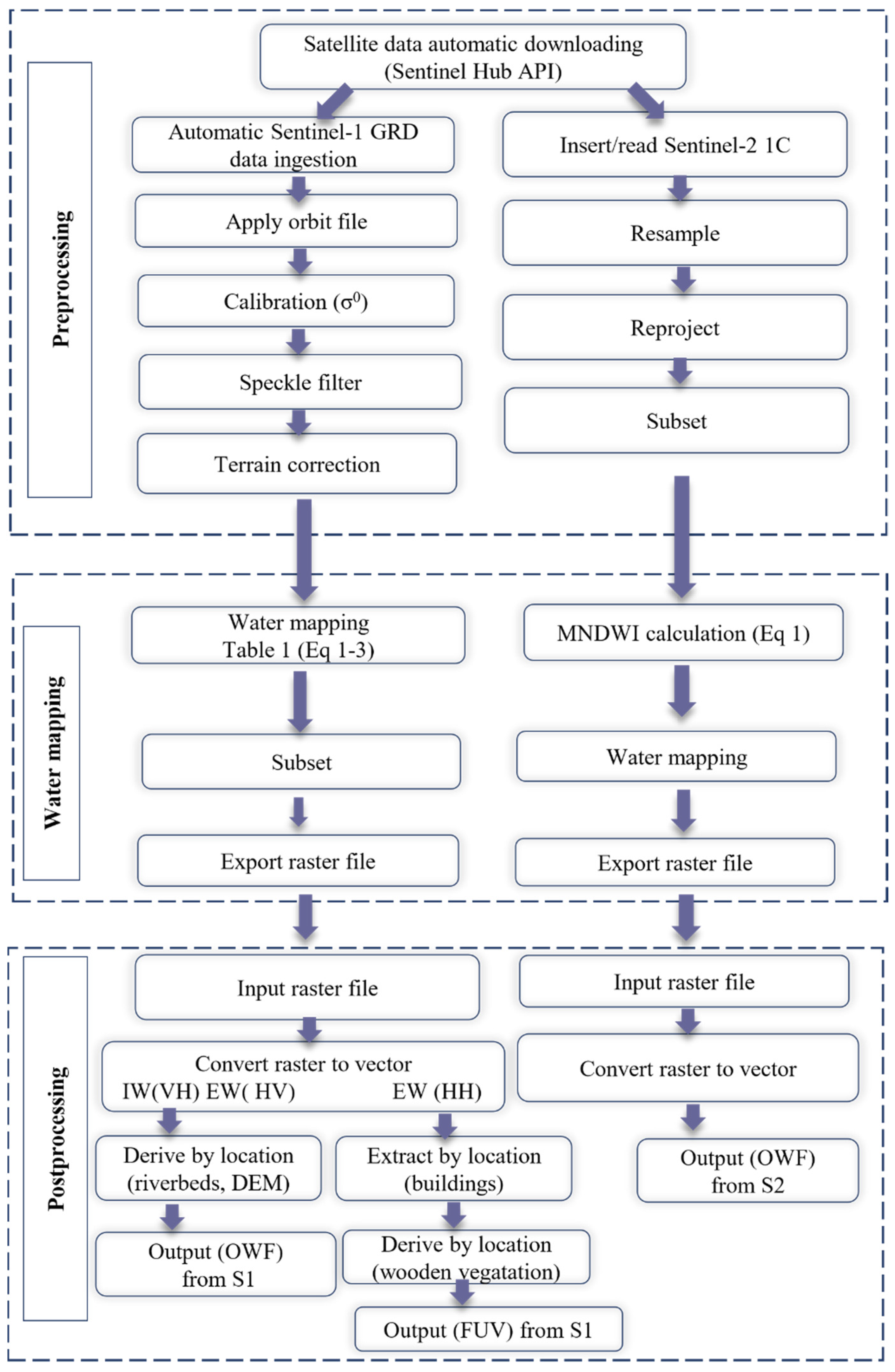
Set up an optimal automatic workflow for open-water and flooded forest mapping from S1 data.
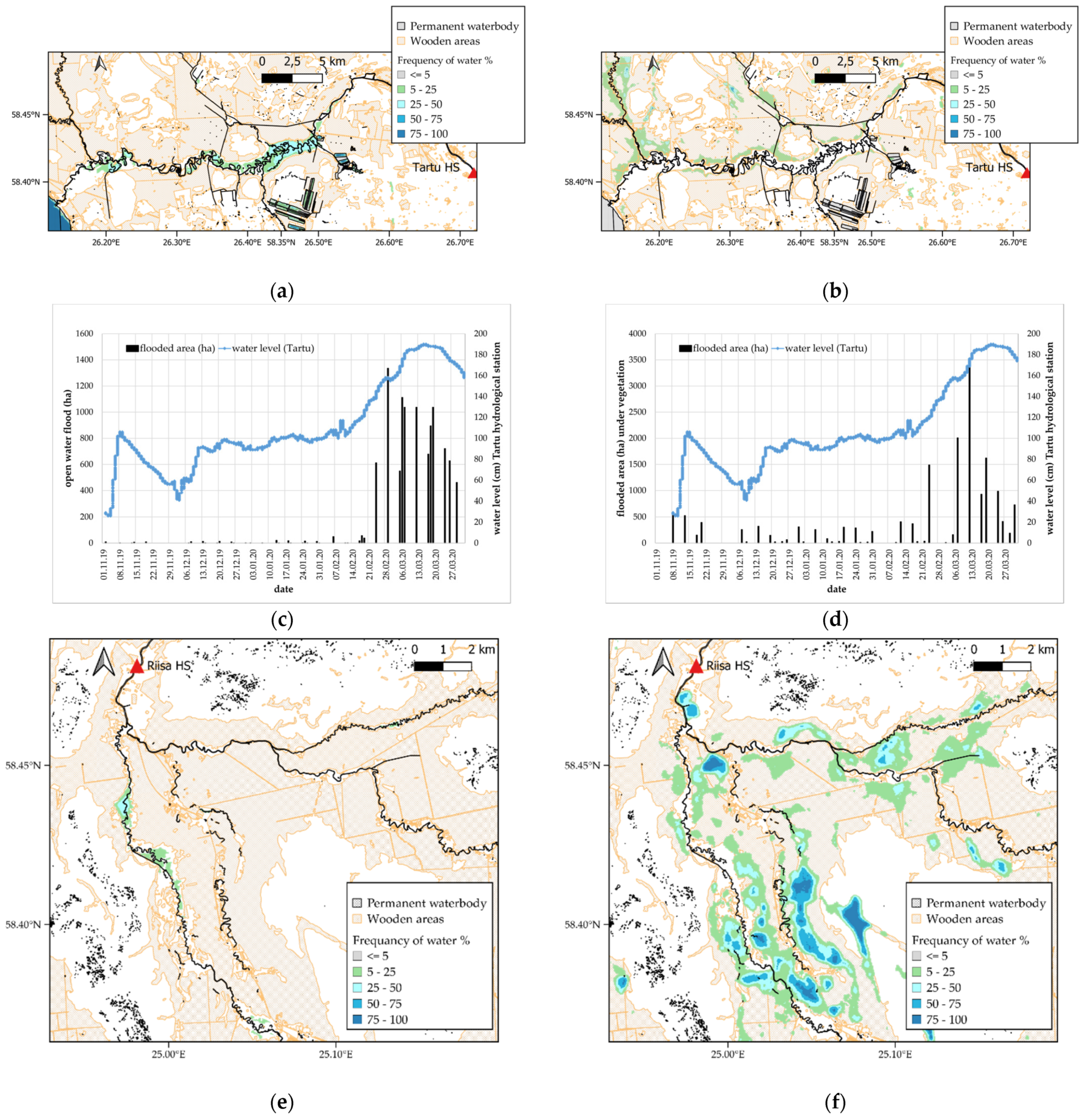
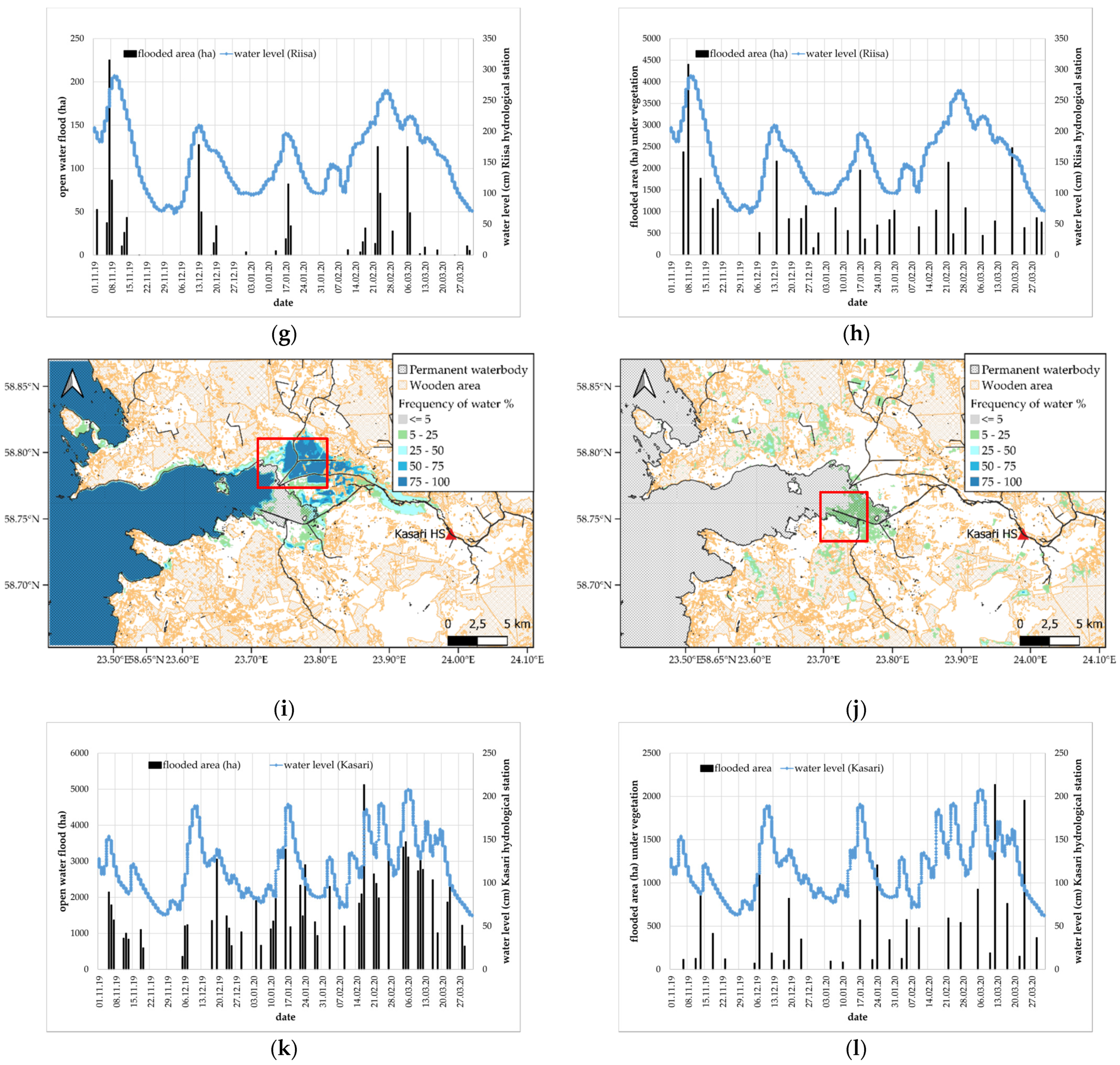
Apply the workflow for the mapping of flood duration and extent on three of the largest floodplains in Estonia during an extremely mild winter (1 November 2019–31 March 2020).
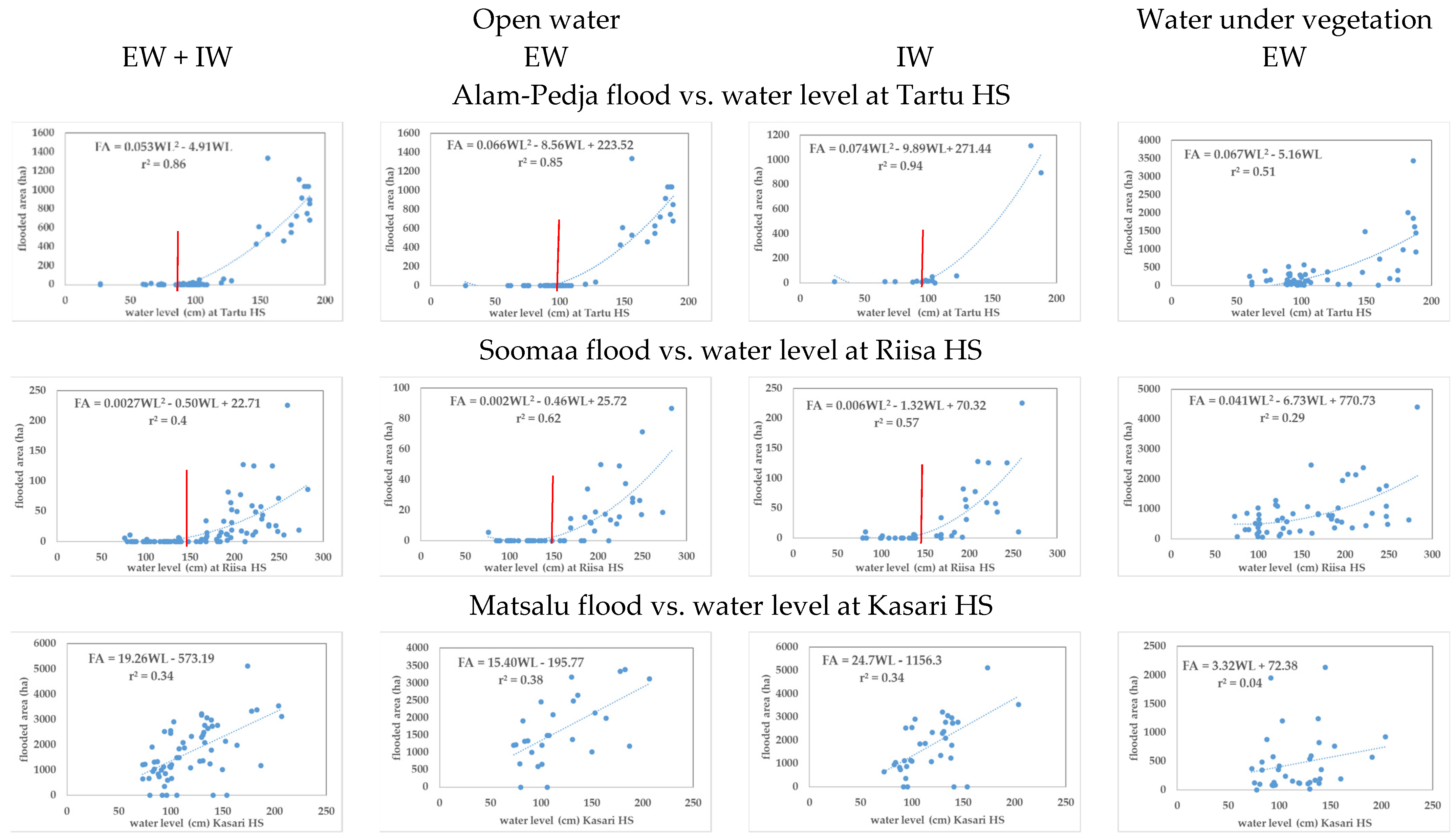
Analyze the correlation between flood extent and the water level measured in the closest hydrological station. Define the water level that indicates the occurrence of flooding (river coastline excess) on floodplains.
5. Discussion
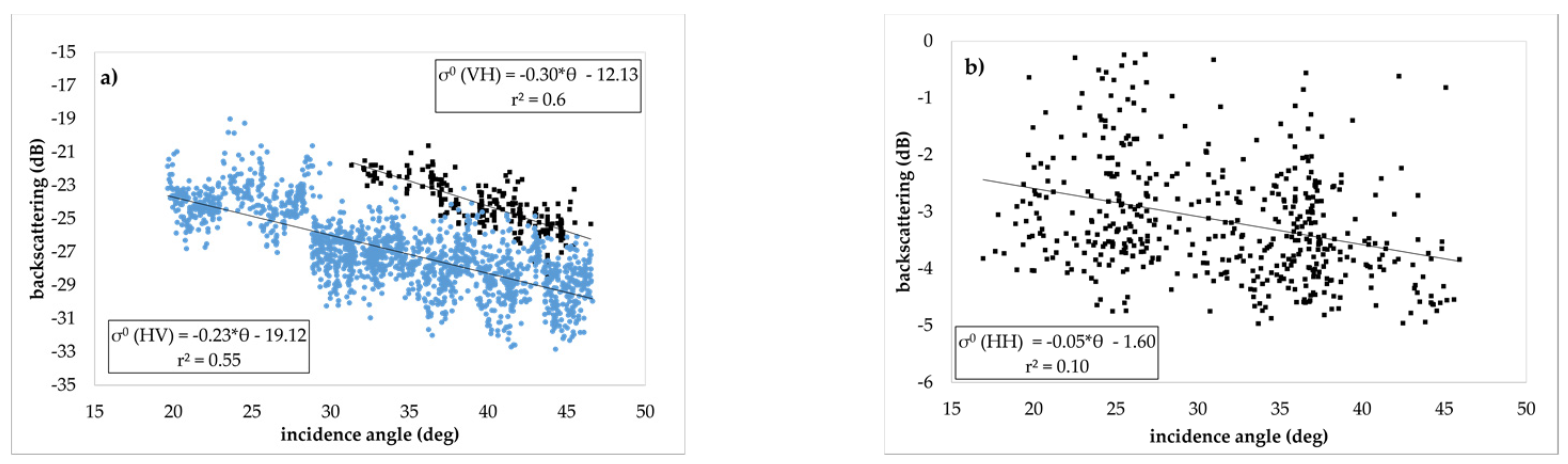
Previous studies have shown the advantages of incidence angle dependent thresholding in the case of TerraSAR-X and Envisat ASAR datasets [
18,
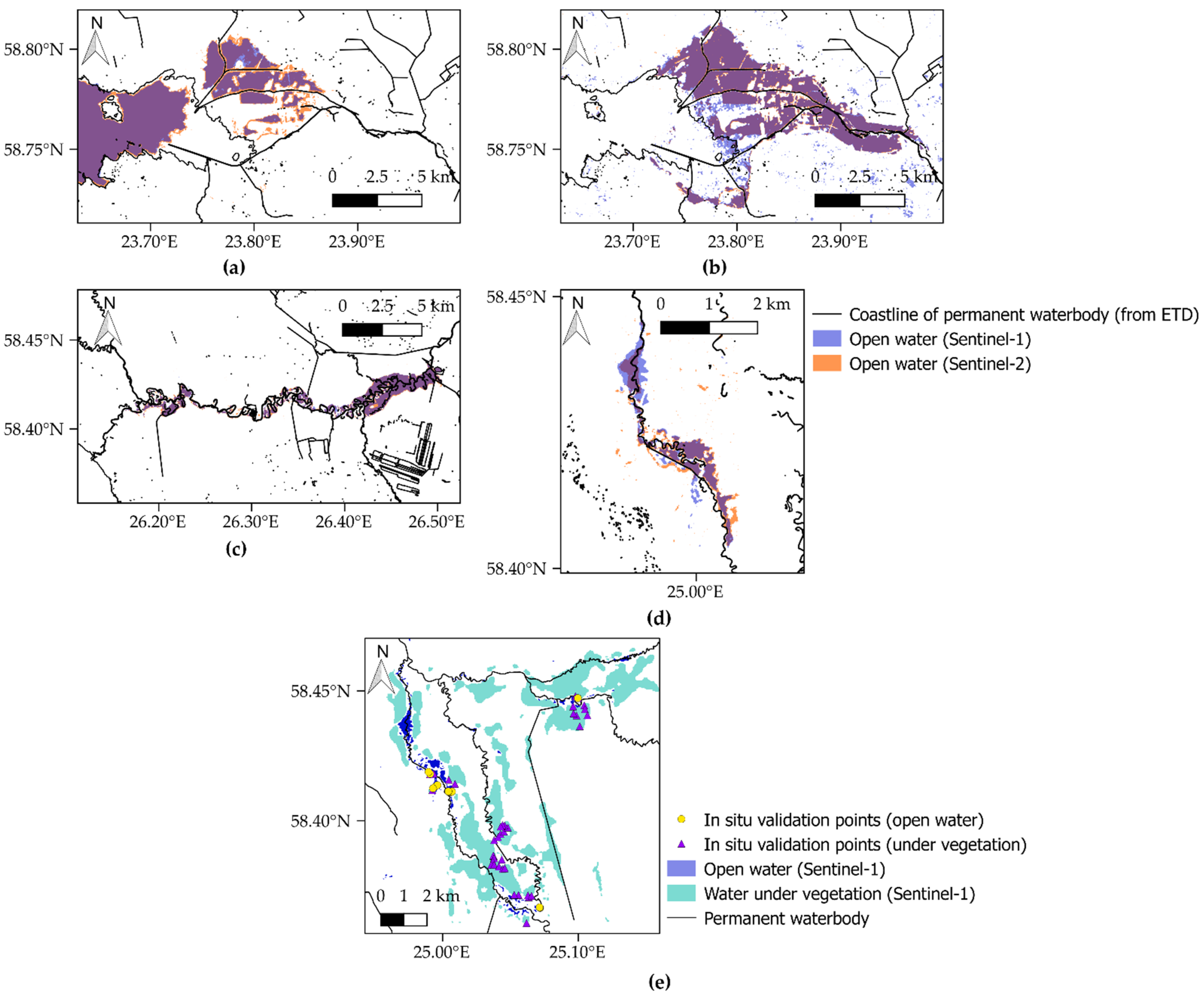
54]. Our operational setup for flood mapping from S1 data for Estonian floodplains integrates incident angle dependent water thresholding and post-processing using auxiliary information from the Estonian Topographic Database. Post-processing using information from the ETD enables the elimination of water lookalikes. We evaluated the open water mapping accuracy for IW mode VH polarization at our test sites. There was good agreement between the water mapped from IW VH data and the S2 MNDWI index, with an accuracy as high as 96.70% and a kappa hat of 0.86 (
Table 6). The accuracy of flood mapping using S1 VH polarization has also been evaluated by Twele et al. [
23], who obtained a kappa hat coefficient of 0.88 and an accuracy of 94%. While their operational methodology applied for flood mapping differs from that used in our study, the overall accuracy of the flood mapping is comparable. In the study conducted by Twele et al. [
23], the split based thresholding for water mapping was used together with the HAND index in the post-processing step.
During the winter season, the default imaging mode of S1 over the Baltic Sea region is the EW regime. To delineate the information about flooded areas in Estonia, an algorithm for open water mapping for the EW regime was established and applied. The open water mapping accuracy from EW HV polarization data was 97.8%. By including the information from EW data, we could delineate the flood maps approximately using 55 images from each test site. Combining the information from IW and EW regimes, we analyzed 83 images from the Alam-Pedja test site, 93 from the Soomaa test site, and 64 from the Matsalu test site for open water mapping for the period of 1 November 2019–31 March 2020 (
Figure 5). Thus, the proposed flood mapping method was tested on a large and diverse dataset. The method developed and proposed in the current study has potential for operational mapping of floods in Estonia and neighboring countries (e.g., Latvia).
The winter of 2019/2020 was extremely mild in Estonia, and there was no permanent ice on the rivers, nor was there snow cover. The monthly averaged air temperature was above 0 °C at all meteorological stations. Our analysis of flood duration and extent showed that in the winter of 2019/2020, floods were observed almost through the whole period of winter. However, the dynamics of the floods differed between the test sites. The maximum flooding observed at Alam-Pedja occurred in March, while at Soomaa and Matsalu several flood events were detected during the winter of 2019/2020. Analysis of the open-water flood extent and water level measured at the closest hydrological station confirmed the correlation between these variables. The correlation was more significant (r2 < 0.6) for the inland riverside floodplains of Alam-Pedja and Soomaa. For the coastal floodplain at Matsalu, the correlation was 0.34, indicating that the river gauge data cannot be used as proxy for flood extent as the coastal flood was significantly influenced by marine processes (not only by riverine hydrology and precipitation). The analysis also revealed that at Alam-Pedja, floods occur when the water level rises above 120 cm at the Tartu HS. At the Soomaa test site, floods occur when the water level rises above 170 cm at the Riisa HS. At the Matsalu test site, open water outside the official coastline could be observed throughout the winter, and we could not define the precise water level at the Kasari HS that results in a flooding at the floodplain. The Matsalu floodplain is located at the outflow to the Baltic Sea; therefore, it is also influenced by the water level in the sea.
Defining the water level at the closest hydrological station from which the floods start (shoreline excess occurs) can provide information for risk mitigation. Hydraulic modelling is a common tool used in flood risk estimation [
57]. However, for hydraulic and hydrological modelling, detailed information about riverbed topography, a digital elevation model of the landscape, and a flow rate are needed. These datasets are not always available; therefore, analysis of remote sensing information in combination with standard gauge data can give valuable information from a single source. S1 time series analysis with local gauge data has been used to determine the positional accuracy of riverside embankments [
58]. A study conducted by Wood et al. [
58] also pointed out the possibility of determining the positional accuracy of embankments using only a sequence of S1 imagery and gauge data without using topographic data.
In the winter of 2019/2020, several floods in forested areas that harmed economic activities were also reported in the Estonian press [
41]. However, the economic loss caused by wintertime flooding in Estonia is unknown. The current study indicated that at the inland riverside floodplains of Soomaa and Alam-Pedja, the flooded areas under vegetation reached up to 4500 ha and were about three times larger than open-water floods at these test sites. Voormasik et al. [
30] analyzed the flood extent at Alam-Pedja from TerraSAR-X imagery and estimated the area of flooded forest to be about three times larger than the extent of the open-water flood. Studies indicate that an evaluation of the extent of flooded forest near inland riverbank floodplains is necessary for the estimation of the total flood extent and its economic consequences. Our analysis also revealed that in the case of the inland water floodplains of Alam-Pedja and Soomaa, flood under vegetation could be correlated with the water levels measured at the closest hydrological station.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}