
Hyperspectral Image Destriping and Denoising Using Stripe and Spectral Low-Rank Matrix Recovery and Global Spatial-Spectral Total Variation


Abstract
:
1. Introduction
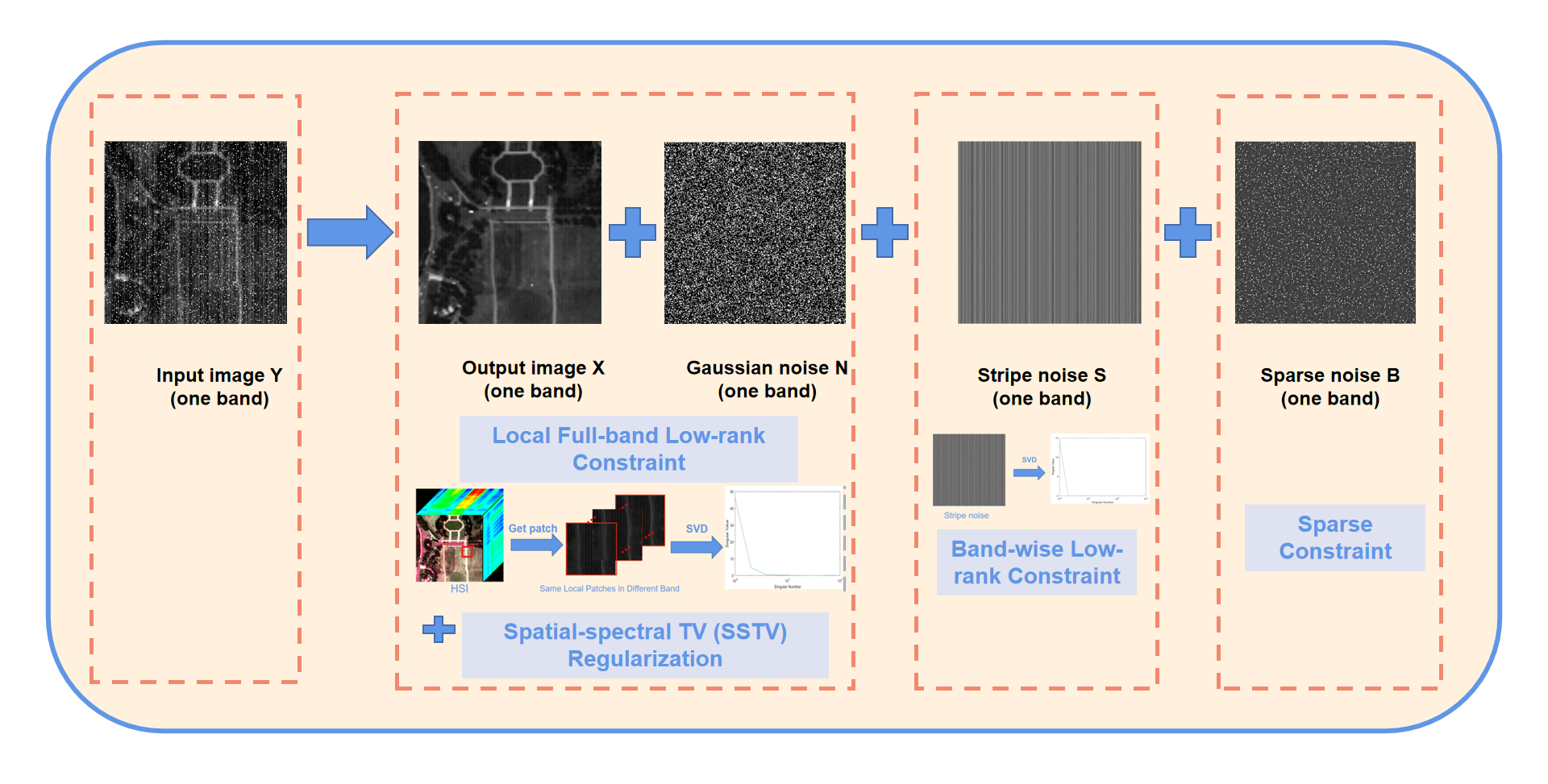
- Previous methods on denoising mixed noise usually classify stripes to sparse noise without considering its structural specificity, while in our paper, we treat the stripes as an independent component and take full advantage of its low-rank property, thus obtaining better destriping and denoising performance.
- A global spatial-spectral total variation (SSTV) regularization is combined with the stripe-spectral low-rank constraint (SSLR) in the proposed HSI denoising model to reconstruct the clean image, stripe, and sparse noise.
- The augmented Lagrange multiplier (ALM) algorithm is employed to solve the proposed SSLR-SSTV model. Both simulated and real data experimental results demonstrate that the proposed method improves the denoising results significantly when compared with the state-of-the-art techniques. Especially, the proposed method provide superb destriping performance with the stripe low-rank constraint.
2. Backgrounds and Preliminaries
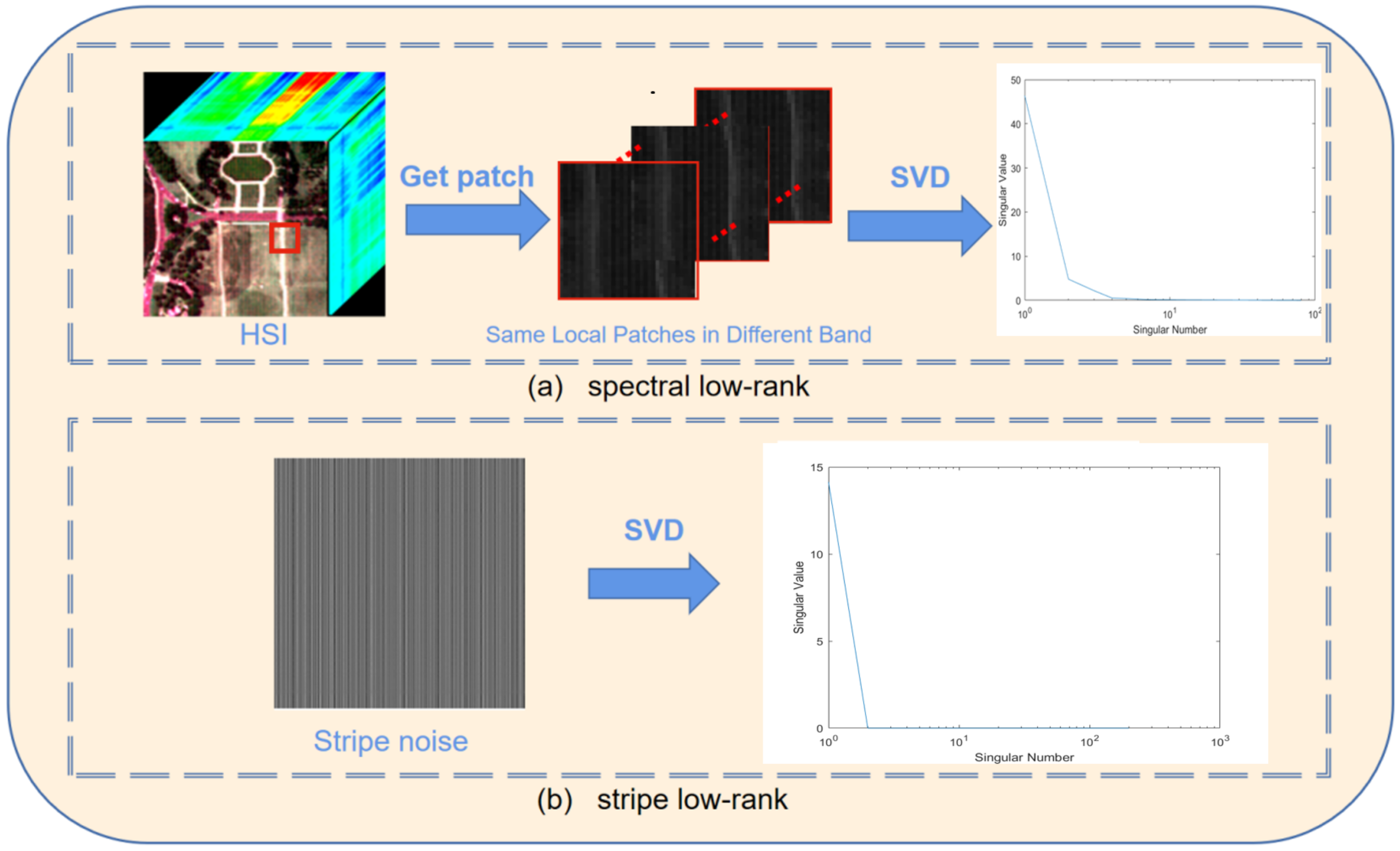
2.1. Low-Rank Property of HSI and Stripe Component
2.2. Spatial-Spectral TV (SSTV) Regularization
3. Stripe-Spectral Low Rank and Spatial-Spectral TV Method
3.1. Proposed Model
3.2. Optimization Procedure
| Algorithm 1 SSLR-SSTV |
| 1: Input: observed HSI , desired rank r, patch size, stopping criterion , regularization parameters |
| , and |
| 2: Initialize: Set parameters , , , , r; = = J = W; U = = = 0; |
| 3: for iter=1: IterMax do |
| Update via (11); |
| Compute by solving (13); |
| Solve (14) for ; |
| Update J, W, U, and the Lagrangian multipliers using (17), (19), (21) and (22), respectively. |
| Check the convergence conditions. |
| , |
| end for |
| 4: Output: Clean Image , sparse noise and stripe noise . |
4. Experimental Configurations
4.1. Datasets
- ROSIS Pavia city center dataset: This dataset was collected by the reflective optics system imaging spectrometer (ROSIS-03). We use a cube to implement our experiment.
- HYDICE Washington DC Mall (WDC) dataset: This dataset was acquired in the Washington DC mall by the Hyperspectral Digital Imagery (HYDICE) sensor. The whole image contains pixels and 191 spectral channels. We select a sub-image of .
- EO Hyperion Dataset: This dataset was acquired by the EO-1 HYPERION sensor; the spectral and spatial resolutions of this dataset are 166 bands and pixels, respectively.
- HYDICE Urban Dataset: This dataset was acquired in the Copperas Cove by the HYDICE sensor, which also contains intricate ground substances. The spectral and spatial resolutions of this dataset are 210 bands and pixels.
4.2. Experimental Indicators and Settings
4.3. Simulation Configurations
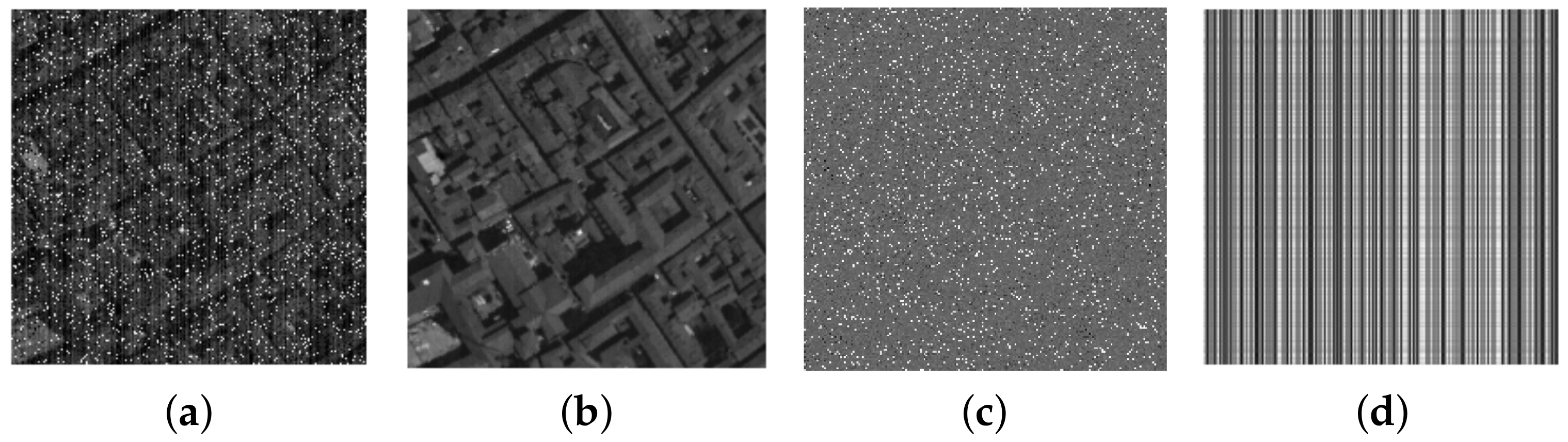
- Case 1: (Gaussian Noise + Salt and Pepper Noise + stripes with different percentages) We add Gaussian noise and impulse noise with = 0.05 and o = 0.1. Besides, the intensity of the stripes is . For each band with stripes, we consider using increasing percentages of the stripes r = 0.3, 0.5, and 0.7, respectively.
- Case 2: (Gaussian Noise + Salt and Pepper Noise + stripes with different intensity) Based on case 1, we choose the stripe noise with the percentage of r = 0.3 and the intensity of v = 0.05, 0.075, and 0.1.
- Case 3: (only stripes) Only stripe noise is added to image data. The intensity of the stripes is v = 0.05 0.075, 0.1, and the percentages of the stripes are r = 0.3, 0.5.
5. Experimental Results
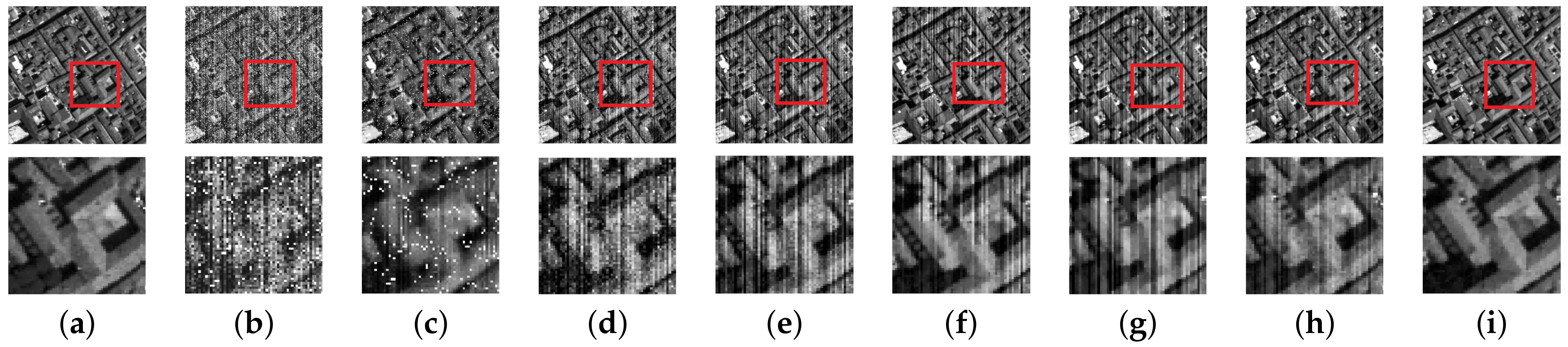
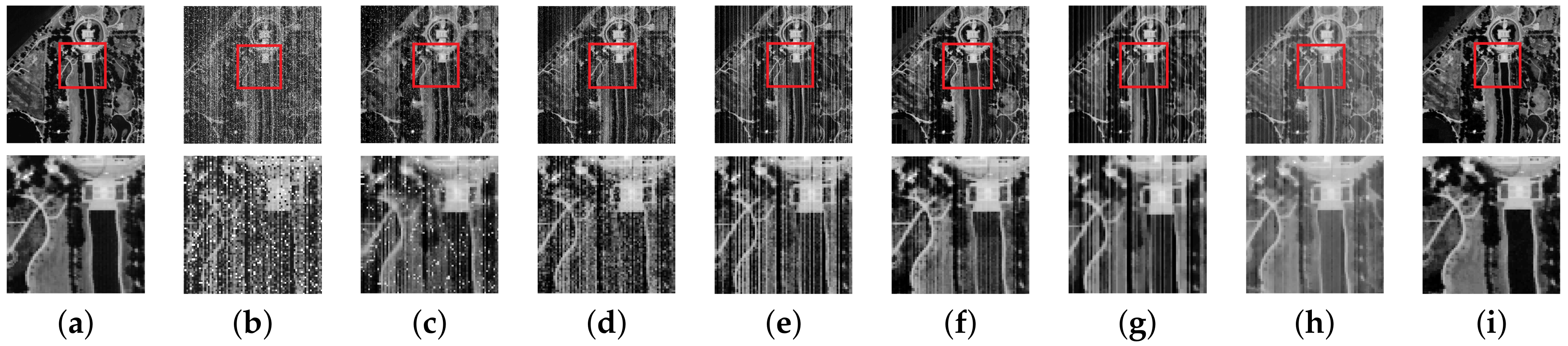
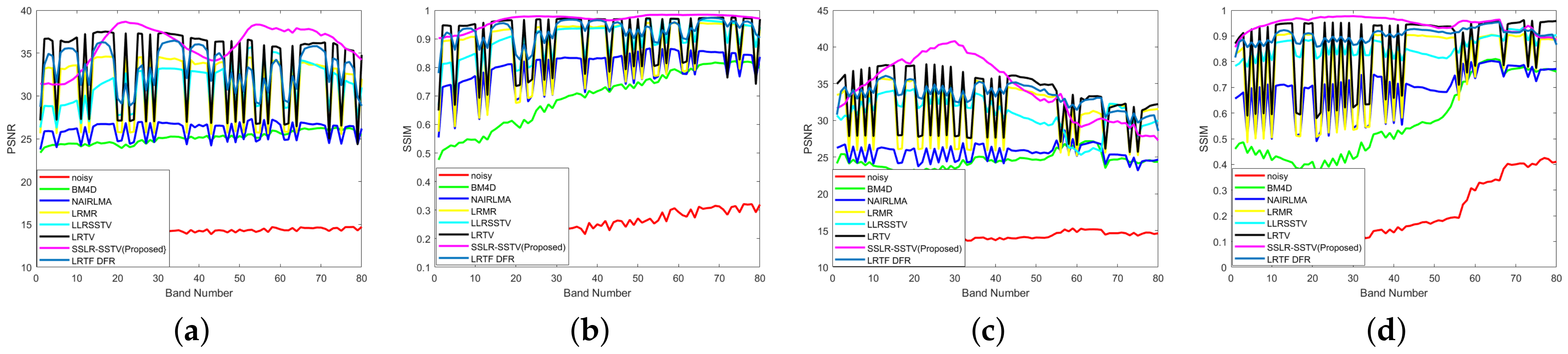
5.1. Simulated Data Experiments
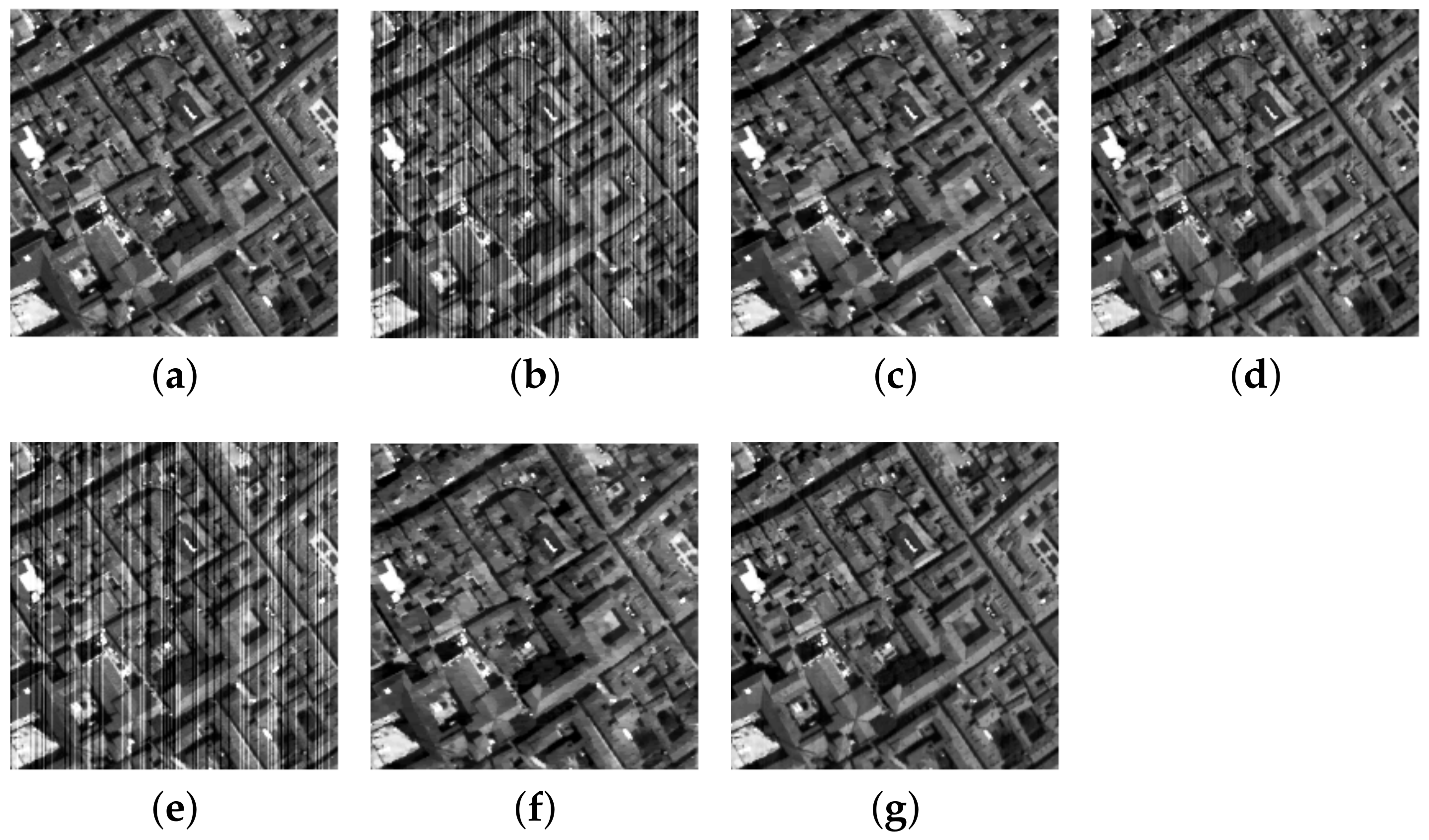
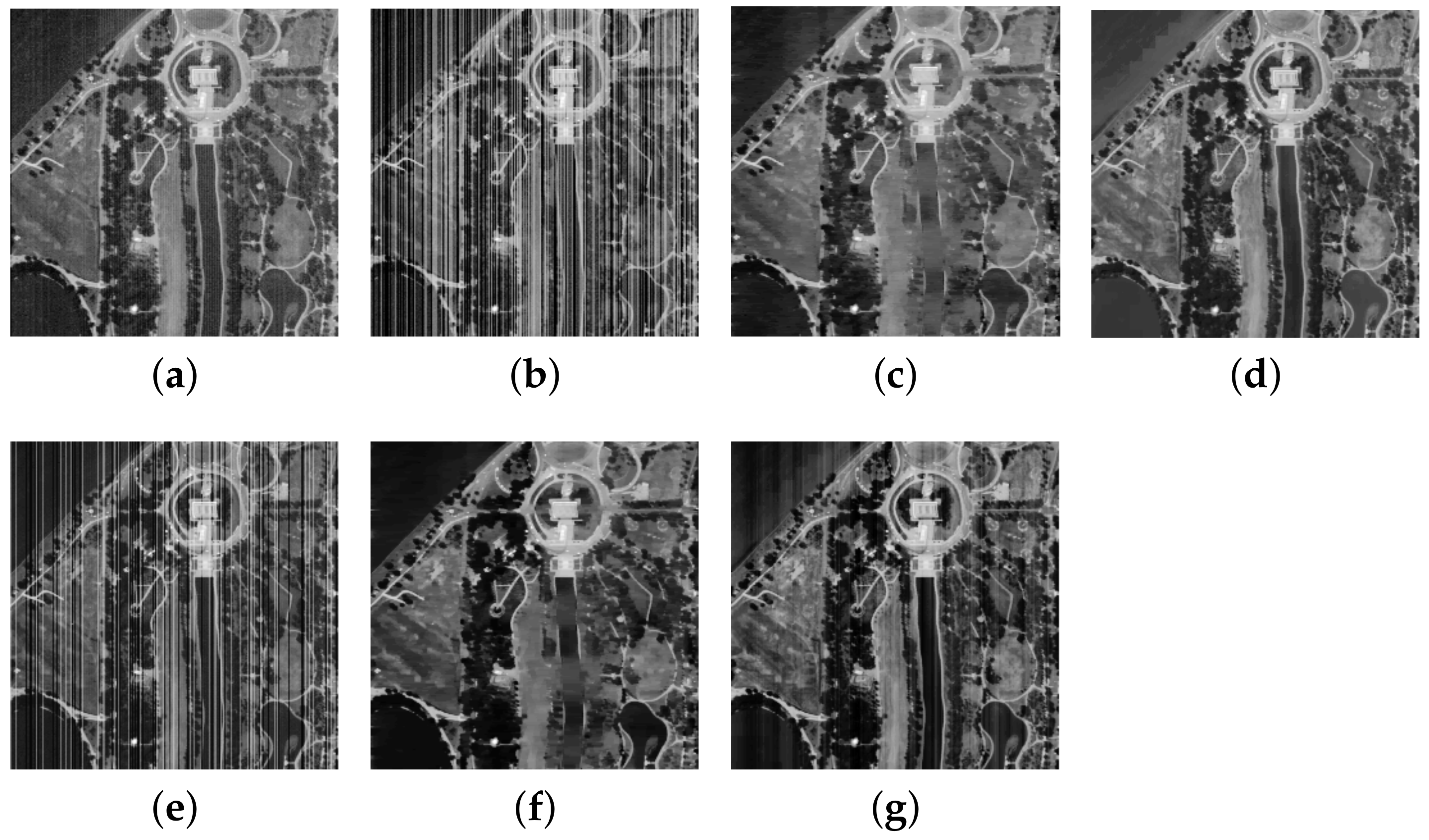
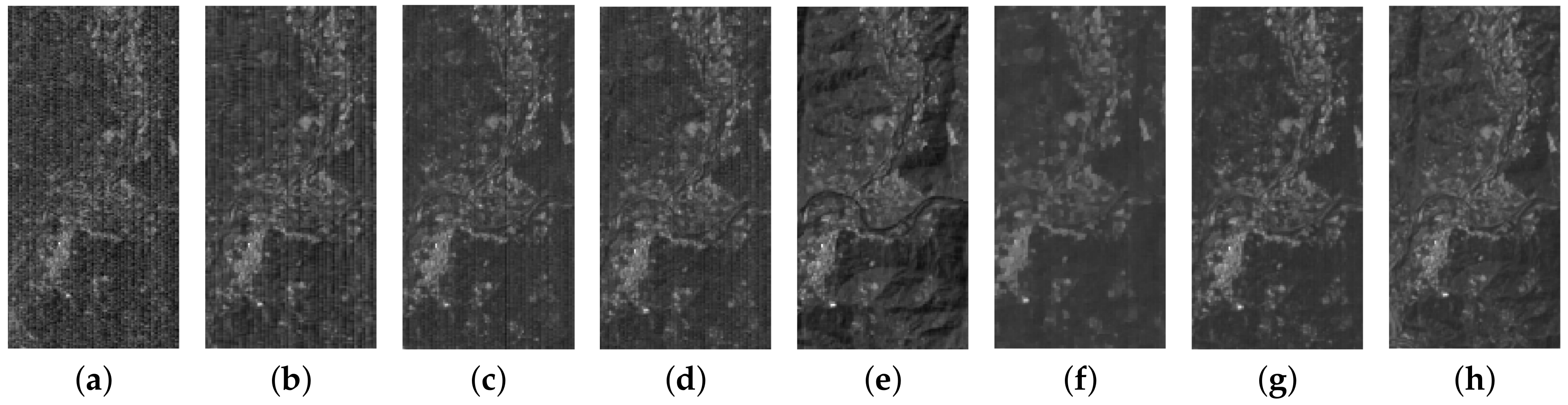
5.2. Real HSI Noise Experiments
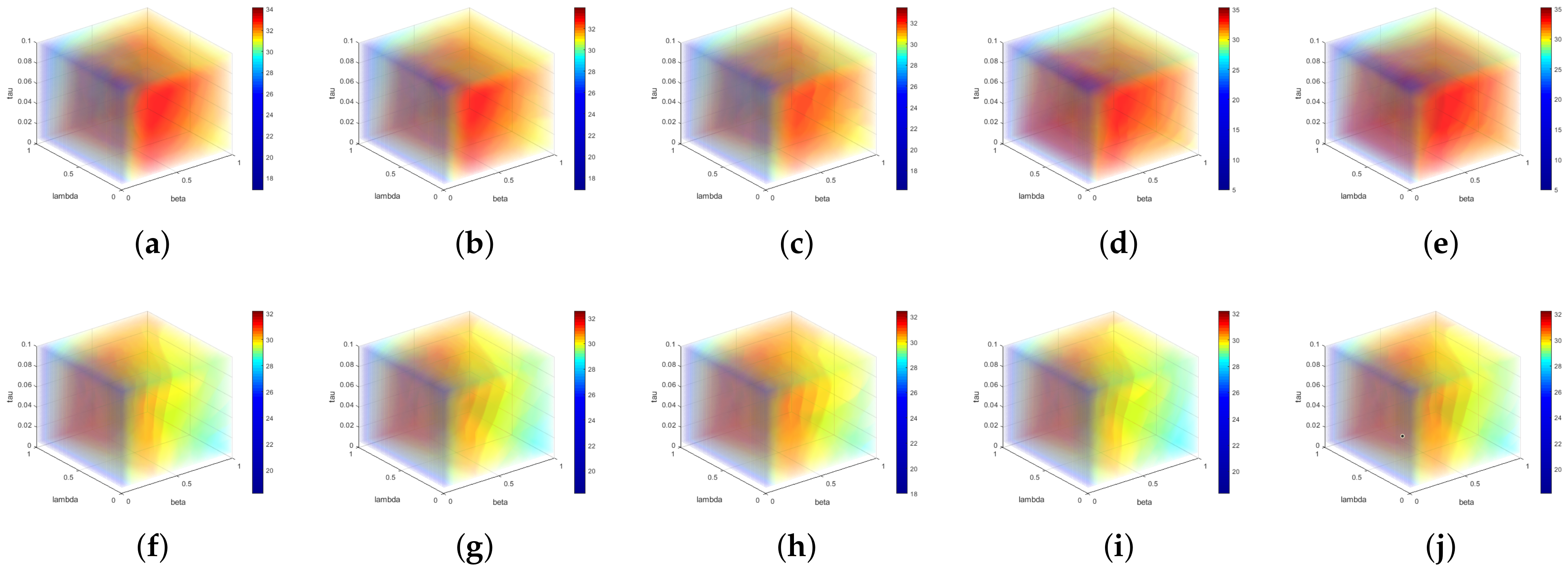
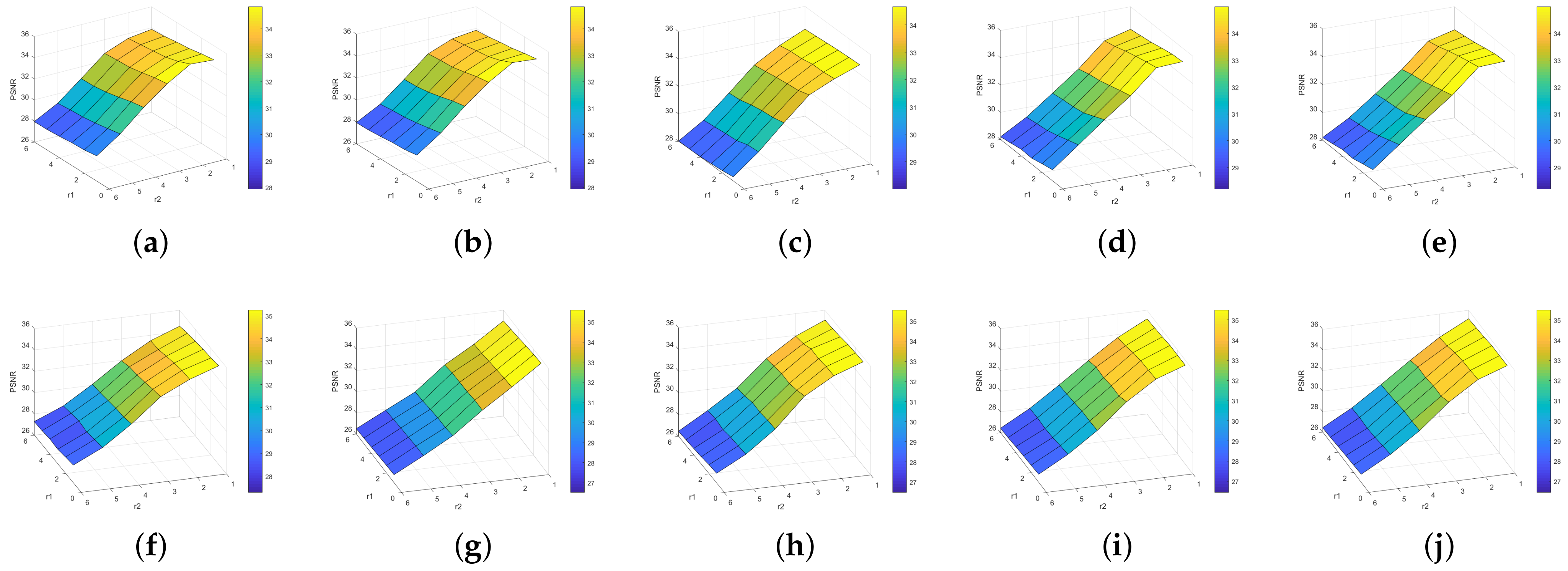
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Landgrebe, D. Hyperspectral image data analysis. IEEE Signal Process. Mag. 2002, 19, 17–28. [Google Scholar] [CrossRef]
- Ghamisi, P.; Yokoya, N.; Li, J.; Liao, W.; Liu, S.; Plaza, J.; Rasti, B.; Plaza, A. Advances in hyperspectral image and signal processing: A comprehensive overview of the state of the art. IEEE Geosci. Remote Sens. Mag. 2017, 5, 37–78. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, L.; Tao, D.; Huang, X. On combining multiple features for hyperspectral remote sensing image classification. IEEE Trans. Geosci. Remote Sens. 2011, 50, 879–893. [Google Scholar] [CrossRef]
- Zhou, J.; Kwan, C.; Ayhan, B.; Eismann, M.T. A novel cluster kernel RX algorithm for anomaly and change detection using hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6497–6504. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, Y.Q.; Chan, J.C.W. Learning and transferring deep joint spectral–spatial features for hyperspectral classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4729–4742. [Google Scholar] [CrossRef]
- Wang, Q.; Yuan, Z.; Du, Q.; Li, X. GETNET: A general end-to-end 2-D CNN framework for hyperspectral image change detection. IEEE Trans. Geosci. Remote Sens. 2018, 57, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Rasti, B.; Scheunders, P.; Ghamisi, P.; Licciardi, G.; Chanussot, J. Noise reduction in hyperspectral imagery: Overview and application. Remote Sens. 2018, 10, 482. [Google Scholar] [CrossRef] [Green Version]
- Elad, M. On the origin of the bilateral filter and ways to improve it. IEEE Trans. Image Process. 2002, 11, 1141–1151. [Google Scholar] [CrossRef] [Green Version]
- Buades, A.; Coll, B.; Morel, J.M. A non-local algorithm for image denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 60–65. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]
- Qian, Y.; Shen, Y.; Ye, M.; Wang, Q. 3-D nonlocal means filter with noise estimation for hyperspectral imagery denoising. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 1345–1348. [Google Scholar]
- Maggioni, M.; Katkovnik, V.; Egiazarian, K.; Foi, A. Nonlocal transform-domain filter for volumetric data denoising and reconstruction. IEEE Trans. Image Process. 2012, 22, 119–133. [Google Scholar] [CrossRef]
- Chen, G.; Bui, T.D.; Quach, K.G.; Qian, S.E. Denoising hyperspectral imagery using principal component analysis and block-matching 4D filtering. Can. J. Remote Sens. 2014, 40, 60–66. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral image denoising employing a spectral—Spatial adaptive total variation model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3660–3677. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral image denoising with a spatial—Spectral view fusion strategy. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2314–2325. [Google Scholar] [CrossRef]
- Fu, Y.; Lam, A.; Sato, I.; Sato, Y. Adaptive spatial-spectral dictionary learning for hyperspectral image denoising. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 343–351. [Google Scholar]
- Xu, L.; Li, F.; Wong, A.; Clausi, D.A. Hyperspectral image denoising using a spatial–spectral monte carlo sampling approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3025–3038. [Google Scholar] [CrossRef]
- Zheng, X.; Yuan, Y.; Lu, X. Hyperspectral image denoising by fusing the selected related bands. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2596–2609. [Google Scholar] [CrossRef]
- Huang, X.; Du, B.; Tao, D.; Zhang, L. Spatial-spectral weighted nuclear norm minimization for hyperspectral image denoising. Neurocomputing 2020, 399, 271–284. [Google Scholar] [CrossRef]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Chen, G.; Qian, S.E. Denoising of hyperspectral imagery using principal component analysis and wavelet shrinkage. IEEE Trans. Geosci. Remote Sens. 2010, 49, 973–980. [Google Scholar] [CrossRef]
- Rasti, B.; Sveinsson, J.R.; Ulfarsson, M.O.; Benediktsson, J.A. Hyperspectral image denoising using 3D wavelets. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 1349–1352. [Google Scholar]
- Rasti, B.; Sveinsson, J.R.; Ulfarsson, M.O.; Benediktsson, J.A. Hyperspectral image denoising using first order spectral roughness penalty in wavelet domain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 2458–2467. [Google Scholar] [CrossRef]
- Song, H.; Wang, G.; Zhang, K. Hyperspectral image denoising via low-rank matrix recovery. Remote Sens. Lett. 2014, 5, 872–881. [Google Scholar] [CrossRef]
- Zhang, H.; He, W.; Zhang, L.; Shen, H.; Yuan, Q. Hyperspectral image restoration using low-rank matrix recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Hyperspectral image denoising via noise-adjusted iterative low-rank matrix approximation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3050–3061. [Google Scholar] [CrossRef]
- Huang, Z.; Li, S.; Fang, L.; Li, H.; Benediktsson, J.A. Hyperspectral image denoising with group sparse and low-rank tensor decomposition. IEEE Access 2017, 6, 1380–1390. [Google Scholar] [CrossRef]
- Xue, J.; Zhao, Y.; Liao, W.; Chan, J.C.W. Nonlocal low-rank regularized tensor decomposition for hyperspectral image denoising. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5174–5189. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, L.; He, W.; Zhang, L. Hyperspectral image denoising with total variation regularization and nonlocal low-rank tensor decomposition. IEEE Trans. Geosci. Remote Sens. 2019, 58, 3071–3084. [Google Scholar] [CrossRef]
- Zhao, Y.Q.; Yang, J. Hyperspectral image denoising via sparse representation and low-rank constraint. IEEE Trans. Geosci. Remote Sens. 2014, 53, 296–308. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, Y.Q.; Chan, J.C.W.; Kong, S.G. Coupled sparse denoising and unmixing with low-rank constraint for hyperspectral image. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1818–1833. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, Z.; Jin, J.; Wang, T.; Shen, Y. Low rank constraint and spatial spectral total variation for hyperspectral image mixed denoising. Signal Process. 2018, 142, 11–26. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Total-variation-regularized low-rank matrix factorization for hyperspectral image restoration. IEEE Trans. Geosci. Remote Sens. 2015, 54, 178–188. [Google Scholar] [CrossRef]
- Zheng, Y.B.; Huang, T.Z.; Zhao, X.L.; Chen, Y.; He, W. Double-Factor-Regularized Low-Rank Tensor Factorization for Mixed Noise Removal in Hyperspectral Image. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 8450–8464. [Google Scholar] [CrossRef]
- Xie, W.; Li, Y. Hyperspectral imagery denoising by deep learning with trainable nonlinearity function. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1963–1967. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, Q.; Li, J.; Shen, H.; Zhang, L. Hyperspectral image denoising employing a spatial—Spectral deep residual convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1205–1218. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Yuan, Q.; Li, J.; Liu, X.; Shen, H.; Zhang, L. Hybrid noise removal in hyperspectral imagery with a spatial—Spectral gradient network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7317–7329. [Google Scholar] [CrossRef]
- Li, B.; Gou, Y.; Liu, J.Z.; Zhu, H.; Zhou, J.T.; Peng, X. Zero-Shot Image Dehazing. IEEE Trans. Image Process. 2020, 29, 8457–8466. [Google Scholar] [CrossRef] [PubMed]
- Gou, Y.; Li, B.; Liu, Z.; Yang, S.; Peng, X. CLEARER: Multi-Scale Neural Architecture Search for Image Restoration. In Proceedings of the Advances in Neural Information Processing Systems 33 pre-proceedings (NeurIPS 2020), Vancouver, BC, Canada, 6–12 December 2020. [Google Scholar]
- Xue, J.; Zhao, Y.; Liao, W.; Kong, S.G. Joint spatial and spectral low-rank regularization for hyperspectral image denoising. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1940–1958. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Shen, H.; Zhang, L. Hyperspectral image denoising using local low-rank matrix recovery and global spatial–spectral total variation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 713–729. [Google Scholar] [CrossRef]
- Chang, Y.; Yan, L.; Fang, H.; Luo, C. Anisotropic spectral-spatial total variation model for multispectral remote sensing image destriping. IEEE Trans. Image Process. 2015, 24, 1852–1866. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Zhang, H.; Zhang, L. Total variation regularized reweighted sparse nonnegative matrix factorization for hyperspectral unmixing. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3909–3921. [Google Scholar] [CrossRef]
- Fazel, M. Matrix Rank Minimization with Applications. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2003. [Google Scholar]
- Huang, Y.M.; Yan, H.Y.; Wen, Y.W.; Yang, X. Rank minimization with applications to image noise removal. Inf. Sci. 2018, 429, 147–163. [Google Scholar] [CrossRef]
- Candès, E.J.; Sing-Long, C.A.; Trzasko, J.D. Unbiased risk estimates for singular value thresholding and spectral estimators. IEEE Trans. Signal Process. 2013, 61, 4643–4657. [Google Scholar] [CrossRef] [Green Version]
- Cai, J.F.; Candès, E.J.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Singh, A.; Kumar, H.; Kadambi, G.; Kishore, J.; Shuttleworth, J.; Manikandan, J. Quality Metrics Evaluation of Hyperspectral Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-8. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhao, Y.; Yi, C.; Chan, J.C.W. No-reference hyperspectral image quality assessment via quality-sensitive features learning. Remote Sens. 2017, 9, 305. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuhas, R.H.; Goetz, A.F.; Boardman, J.W. Discrimination among semi-arid landscape endmembers using the spectral angle mapper (SAM) algorithm. In Proceedings of the Summaries of the Third Annual JPL Airborne Geoscience Workshop, Pasadena, CA, USA, 1–5 June 1992. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Data | Gaussian Noise | Salt and Pepper Noise | Stripes | Indicators | Noisy | BM4D | NAILRMA | LRMR | LLRSSTV | LRTV | LRTF_DFR | SSLR-SSTV |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 Gaussian+ Salt and Pepper Noise +stripes (different percentages) | Pavia city | = 0.05 | o = 0.1 | r = 0.3 v = 0.075 r = 0.5 v = 0.075 r = 0.7 v = 0.075 | MPSNR MSSIM MSAM MPSNR MSSIM MASM MPSNR MSSIM MSAM | 14.2135 0.2414 0.7083 14.1624 0.2380 0.7103 14.1338 0.2358 0.7126 | 25.1773 0.6985 0.2340 25.0946 0.6944 0.2325 25.0585 0.6914 0.2339 | 26.3919 0.8161 0.1415 25.9381 0.7916 0.1569 25.5457 0.7627 0.1805 | 32.1789 0.9006 0.1442 31.3789 0.8760 0.1746 30.9459 0.8468 0.2099 | 33.0750 0.9256 0.1299 31.0370 0.8924 0.1634 30.0624 0.8564 0.2102 | 34.0848 0.9240 0.1311 33.5149 0.9078 0.1566 33.1073 0.8819 0.1922 | 34.2962 0.9400 0.1001 33.3251 0.9286 0.1062 32.6091 0.9028 0.1062 | 35.9412 0.9672 0.0883 35.9781 0.9674 0.0860 35.9542 0.9674 0.0864 |
| Washington DC Mall | = 0.05 | o = 0.1 | r = 0.3 v = 0.075 r = 0.5 v = 0.075 r = 0.7 v = 0.075 | MPSNR MSSIM MSAM MPSNR MSSIM MASM MPSNR MSSIM MSAM | 14.1100 0.2030 0.6104 14.0866 0.2013 0.6127 14.0452 0.1989 0.6145 | 24.5282 0.5682 0.2187 24.5261 0.5675 0.2198 24.3282 0.5574 0.2213 | 25.9672 0.7230 0.1597 25.5618 0.6864 0.1708 25.2558 0.6745 0.1769 | 32.2587 0.8481 0.1017 31.3062 0.8015 0.1255 31.2042 0.7979 0.1400 | 32.2334 0.8989 0.1162 30.9260 0.8584 0.1302 30.6388 0.8407 0.1283 | 33.4941 0.8946 0.0746 32.7237 0.8561 0.0939 32.5230 0.8466 0.1102 | 34.7571 0.9327 0.0577 33.5054 0.9059 0.0668 33.1975 0.8954 0.6070 | 34.7809 0.9499 0.0807 34.6840 0.9494 0.0806 34.7539 0.9498 0.0795 | |
| Case 2 Gaussian+ Salt and Pepper Noise +stripes (different intensity) | Pavia city | = 0.05 | o = 0.1 | r = 0.3 v = 0.05 r = 0.3 v = 0.1 | MPSNR MSSIM MSAM MPSNR MSSIM MSAM | 14.2506 0.2445 0.7061 14.1672 0.2387 0.7110 | 25.2494 0.7020 0.2333 25.0163 0.6935 0.2359 | 26.6699 0.8329 0.1333 25.8698 0.7903 0.1612 | 33.2249 0.9298 0.1187 31.3262 0.8757 0.1695 | 35.0842 0.9585 0.0909 31.1318 0.8958 0.1570 | 34.9714 0.9478 0.1072 33.4429 0.9053 0.1485 | 35.6133 0.9619 0.0765 33.0726 0.9218 0.1217 | 35.9348 0.9673 0.0881 35.9719 0.9676 0.0862 |
| Washington DC Mall | = 0.05 | o = 0.1 | r = 0.3 v = 0.05 r = 0.3 v = 0.1 | MPSNR MSSIM MSAM MPSNR MSSIM MASM | 14.1461 0.2052 0.6086 14.0768 0.2010 0.6129 | 24.5298 0.5706 0.2202 24.4740 0.5656 0.2206 | 26.1667 0.7390 0.1568 25.4846 0.6844 0.1719 | 33.2962 0.8821 0.0865 31.2627 0.8073 0.1228 | 32.9514 0.9181 0.1097 30.8719 0.8577 0.1273 | 34.2894 0.9222 0.0613 32.6464 0.8604 0.0900 | 35.2569 0.9398 0.0532 33.2457 0.9033 0.0678 | 34.8278 0.9501 0.0796 34.7806 0.9502 0.0799 |
| Image | Method | Indicators | Stripes | ||||
|---|---|---|---|---|---|---|---|
| r = 0.3 v = 0.075 | r = 0.5 v = 0.075 | r = 0.7 v = 0.075 | r = 0.3 v = 0.05 | r = 0.3 v = 0.1 | |||
| Pavia city | LRID_destripe | MPSNR MSSIM MSAM | 32.7530 0.9554 0.0907 | 32.7487 0.9559 0.0905 | 32.6235 0.9547 0.0920 | 33.3185 0.9567 0.0797 | 32.7800 0.9552 0.0919 |
| SSLR-SSTV | MPSNR MSSIM MSAM | 35.7038 0.9673 0.0866 | 36.3639 0.9704 0.0805 | 32.9474 0.9391 0.1048 | 38.0868 0.9786 0.0722 | 37.5613 0.9770 0.0753 | |
| Washington DC Mall | LRID_destripe | MPSNR MSSIM MSAM | 31.9562 0.9403 0.0589 | 32.0484 0.9394 0.0566 | 31.8708 0.9403 0.0589 | 32.0538 0.9404 0.0575 | 31.8131 0.9392 0.0598 |
| SSLR-SSTV | MPSNR MSSIM MSAM | 33.8812 0.9466 0.0755 | 36.4991 0.9699 0.0657 | 33.1961 0.9305 0.0815 | 35.4121 0.9652 0.0699 | 33.8284 0.9485 0.0761 | |
| Data | Noise | BM4D | NAIRLMA | LRMR | LLRSSTV | LRTV | LRTF_DFR | SSLR-SSTV |
|---|---|---|---|---|---|---|---|---|
| EO Hyperion | 13.7319 | 13.7218 | 13.6193 | 13.4800 | 12.3797 | 12.3925 | 13.4411 | 12.1580 |
| URBAN | 12.9954 | 12.8967 | 12.2262 | 12.2081 | 10.8188 | 11.8250 | 12.9058 | 10.7117 |
| Data | BM4D | NAILRMA | LRMR | LLRSSTV | LRTV | LRTF_DFR | SSLR-SSTV |
|---|---|---|---|---|---|---|---|
| Pavia city | 178.59 s | 60.94 s | 111.18 | 154.63 s | 20.94 s | 71.22 s | 220.25 s |
| Washington DC Mall | 341.22 s | 77.57 s | 283.32 | 373.11 s | 31.52 s | 107.29 s | 576.58 s |
| EO Hyperion | 1432.84 s | 1951.05 s | 1031.03 | 723.98 s | 91.54 s | 144.56 s | 1006.70 s |
| URBAN | 3526.43 s | 4860.03 s | 3124.84 s | 773.26 s | 106.78 s | 161.74 s | 757.68 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Chen, X.; Chai, L. Hyperspectral Image Destriping and Denoising Using Stripe and Spectral Low-Rank Matrix Recovery and Global Spatial-Spectral Total Variation. Remote Sens. 2021, 13, 827. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13040827
Yang F, Chen X, Chai L. Hyperspectral Image Destriping and Denoising Using Stripe and Spectral Low-Rank Matrix Recovery and Global Spatial-Spectral Total Variation. Remote Sensing. 2021; 13(4):827. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13040827
Chicago/Turabian StyleYang, Fang, Xin Chen, and Li Chai. 2021. "Hyperspectral Image Destriping and Denoising Using Stripe and Spectral Low-Rank Matrix Recovery and Global Spatial-Spectral Total Variation" Remote Sensing 13, no. 4: 827. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13040827