
A New Method for Determining an Optimal Diurnal Threshold of GNSS Precipitable Water Vapor for Precipitation Forecasting

 , ,
, ,
Abstract
:
1. Introduction
2. Data and Methodologies
2.1. GNSS-PWV
2.2. Hourly Precipitation
2.3. Criteria for Evaluation of Precipitation Predictions
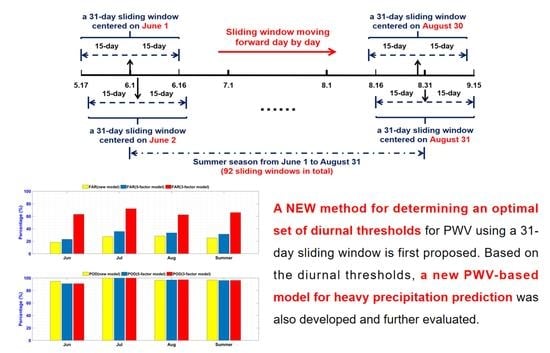
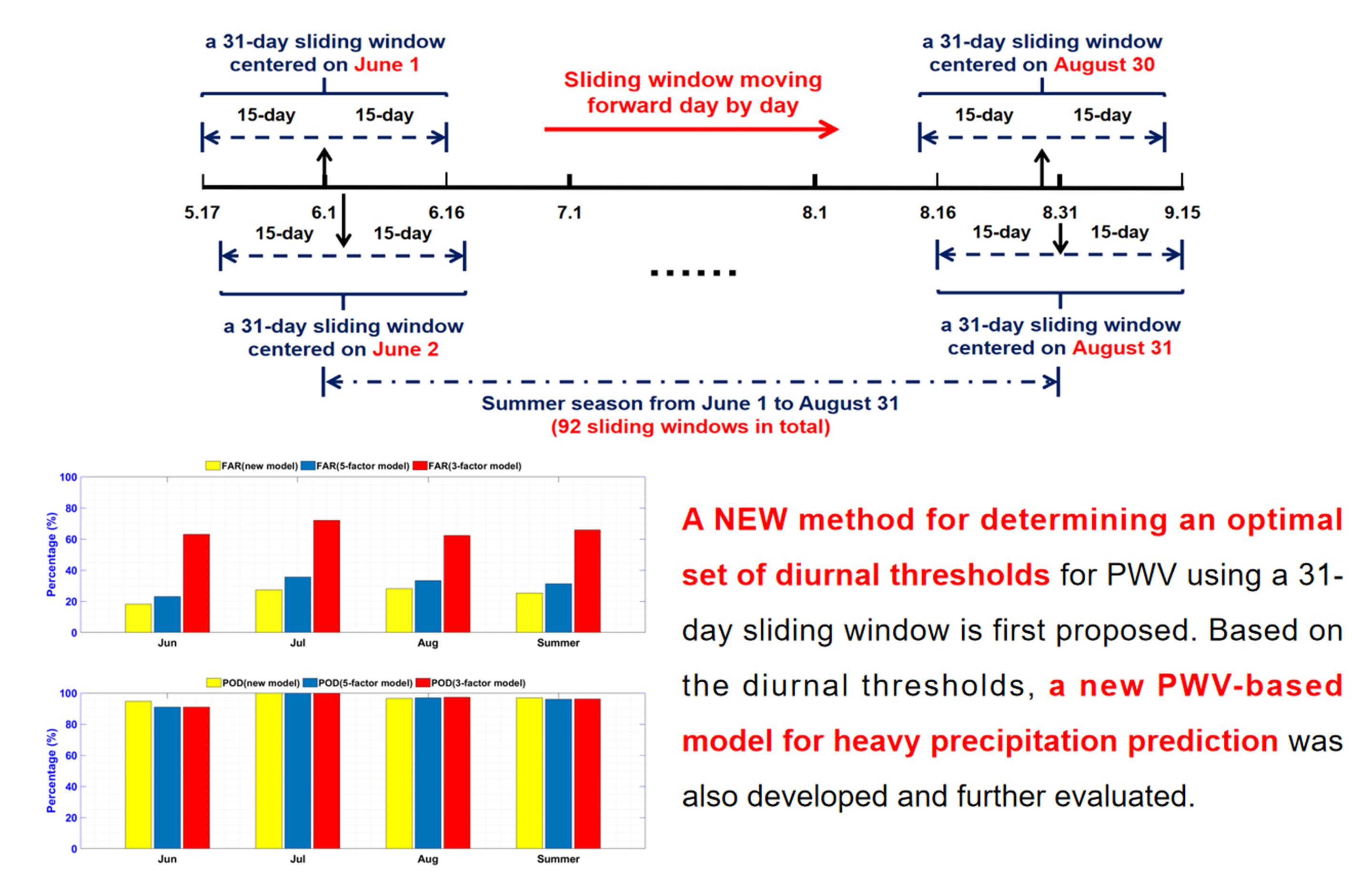
3. New Method for Determining Diurnal Precipitation Thresholds
3.1. Determining Monthly Precipitation Thresholds Based on CSI
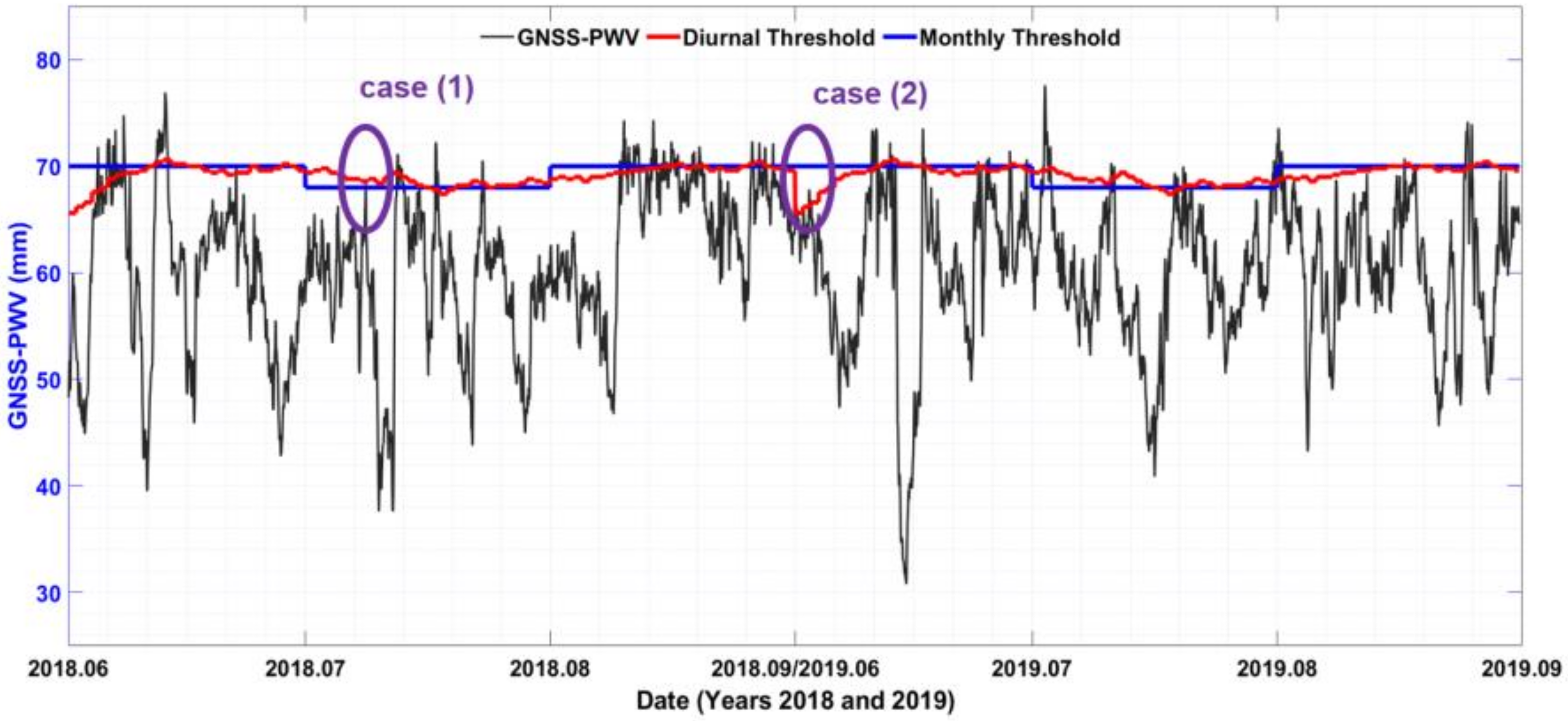
3.2. Rationality of Replacing Monthly Thresholds with Diurnal Thresholds
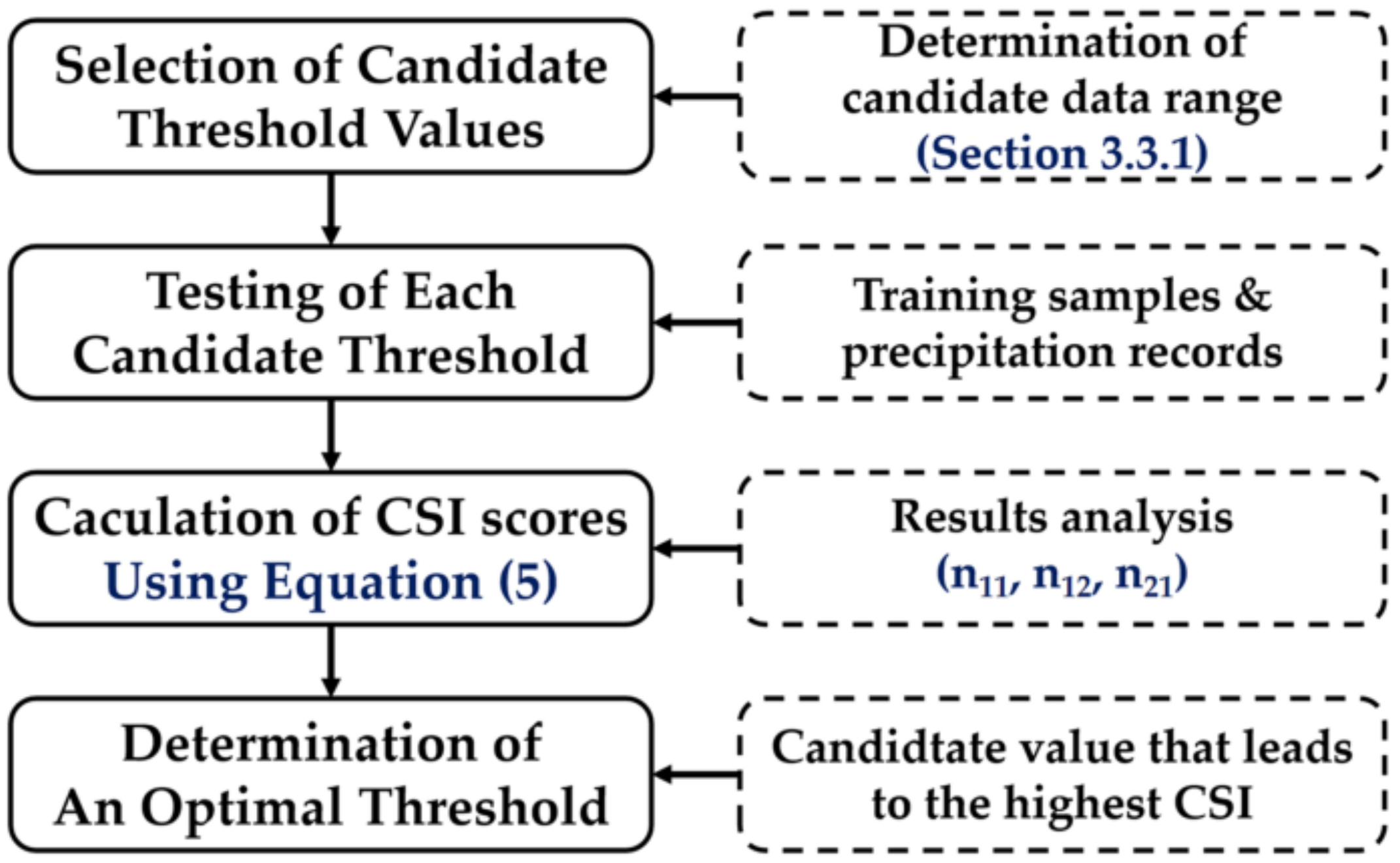
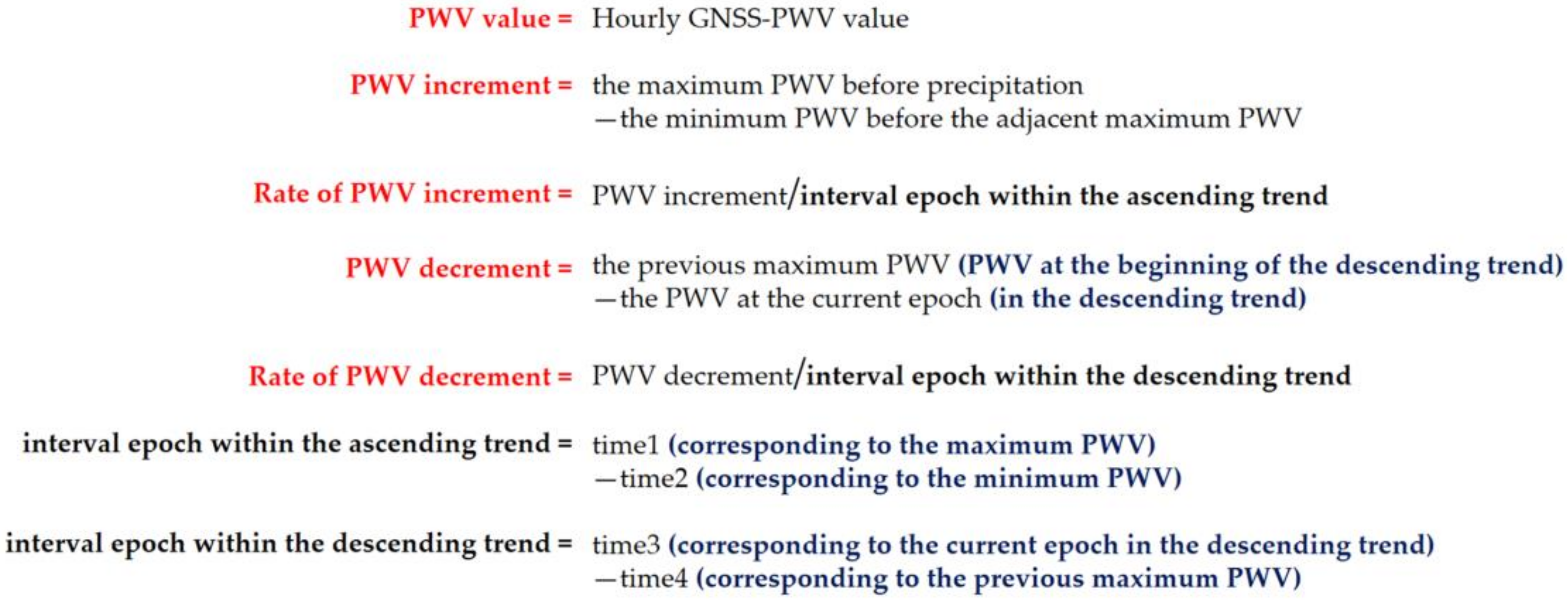
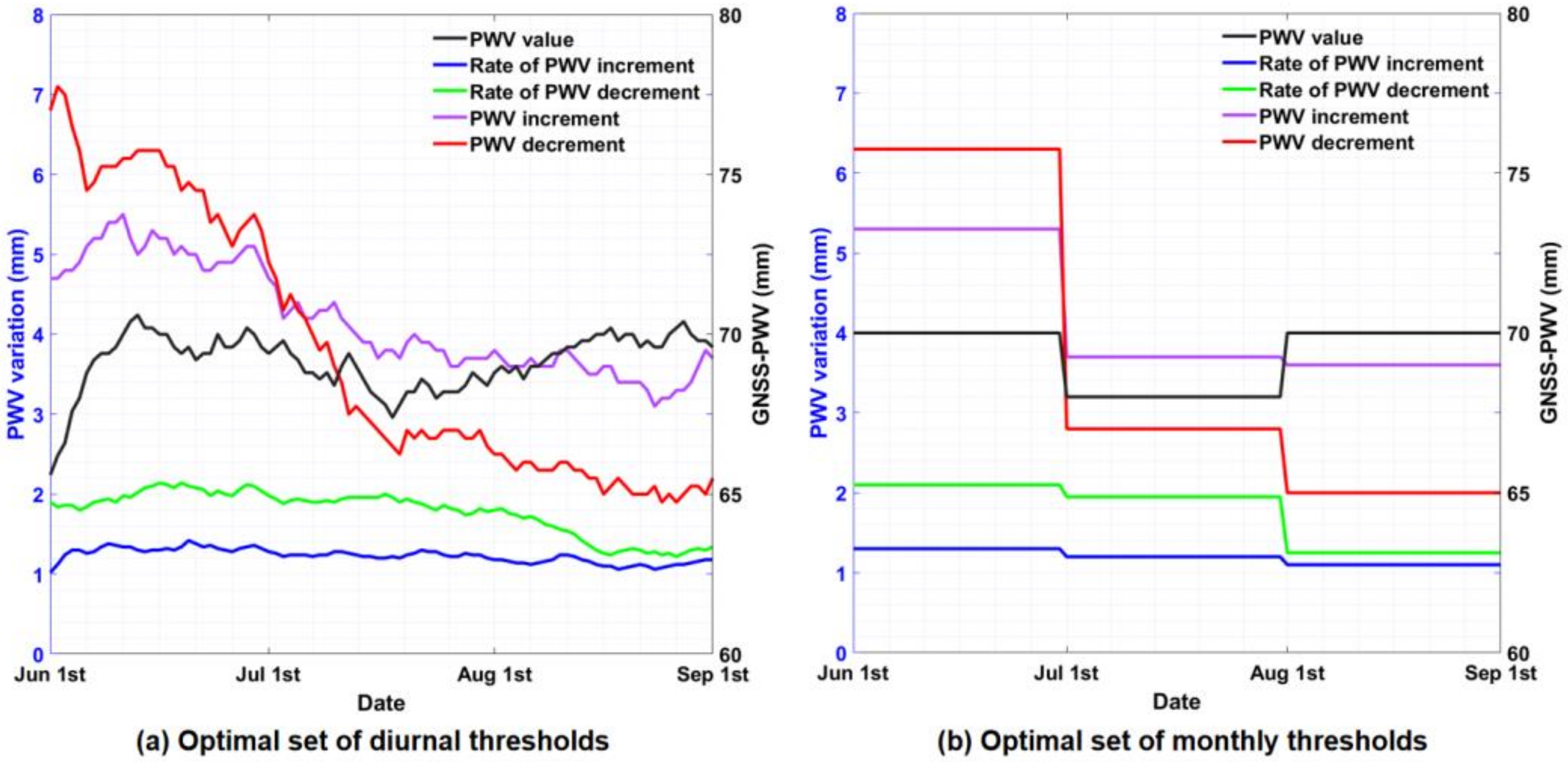
3.3. Determination of Optimal Diurnal Precipitation Thresholds
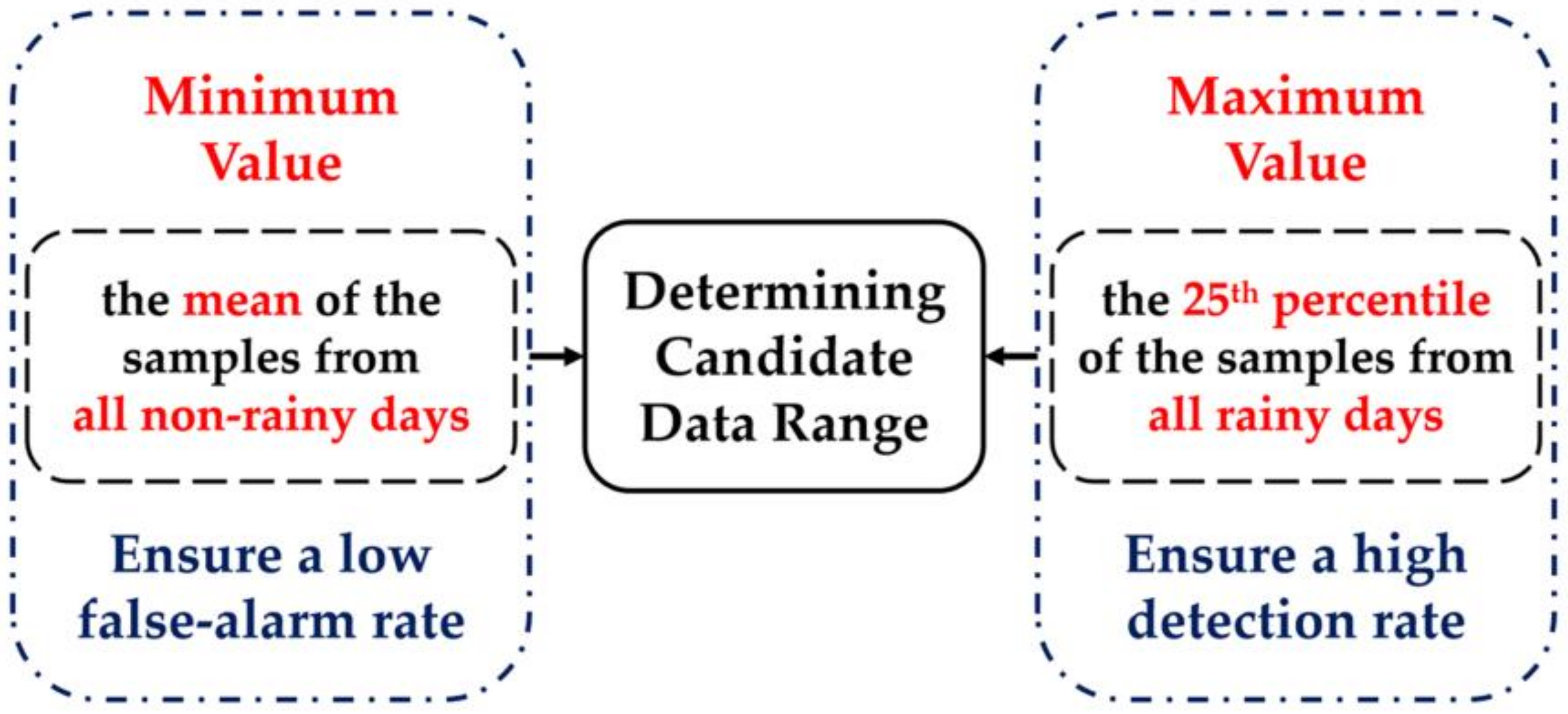
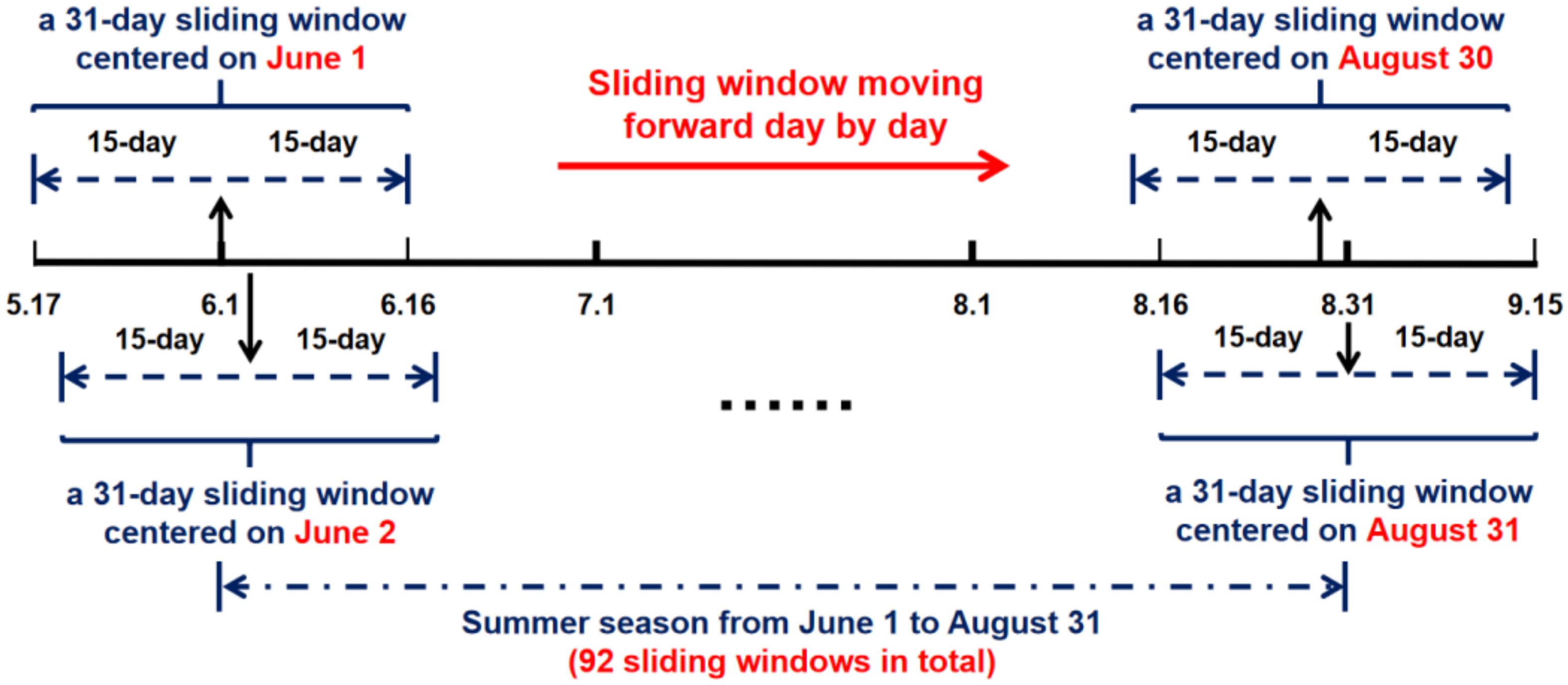
3.3.1. Determining Candidate Data Range
3.3.2. Determining Diurnal Threshold Based on CSI
4. Evaluation of Using New Diurnal Thresholds for Heavy Precipitation Prediction
4.1. Evaluating Predictions from Diurnal and Monthly Thresholds
4.1.1. Comparison of Predictions Resulting from PWV Predictor
4.1.2. Further Analysis
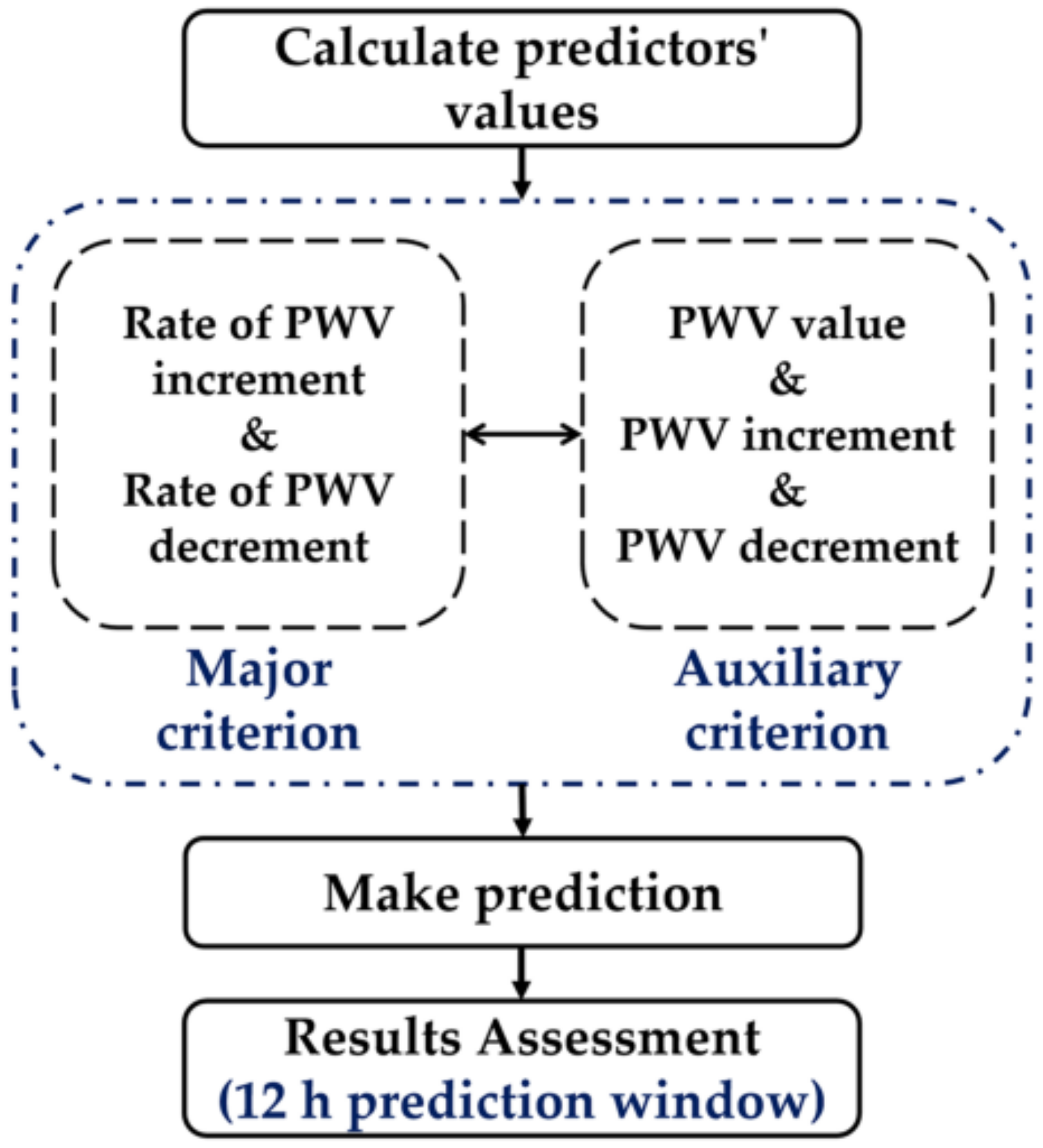
4.2. Developing a New Model Using Diurnal Thresholds for Heavy Precipitation Prediction
4.2.1. Determining Optimal Diurnal Thresholds
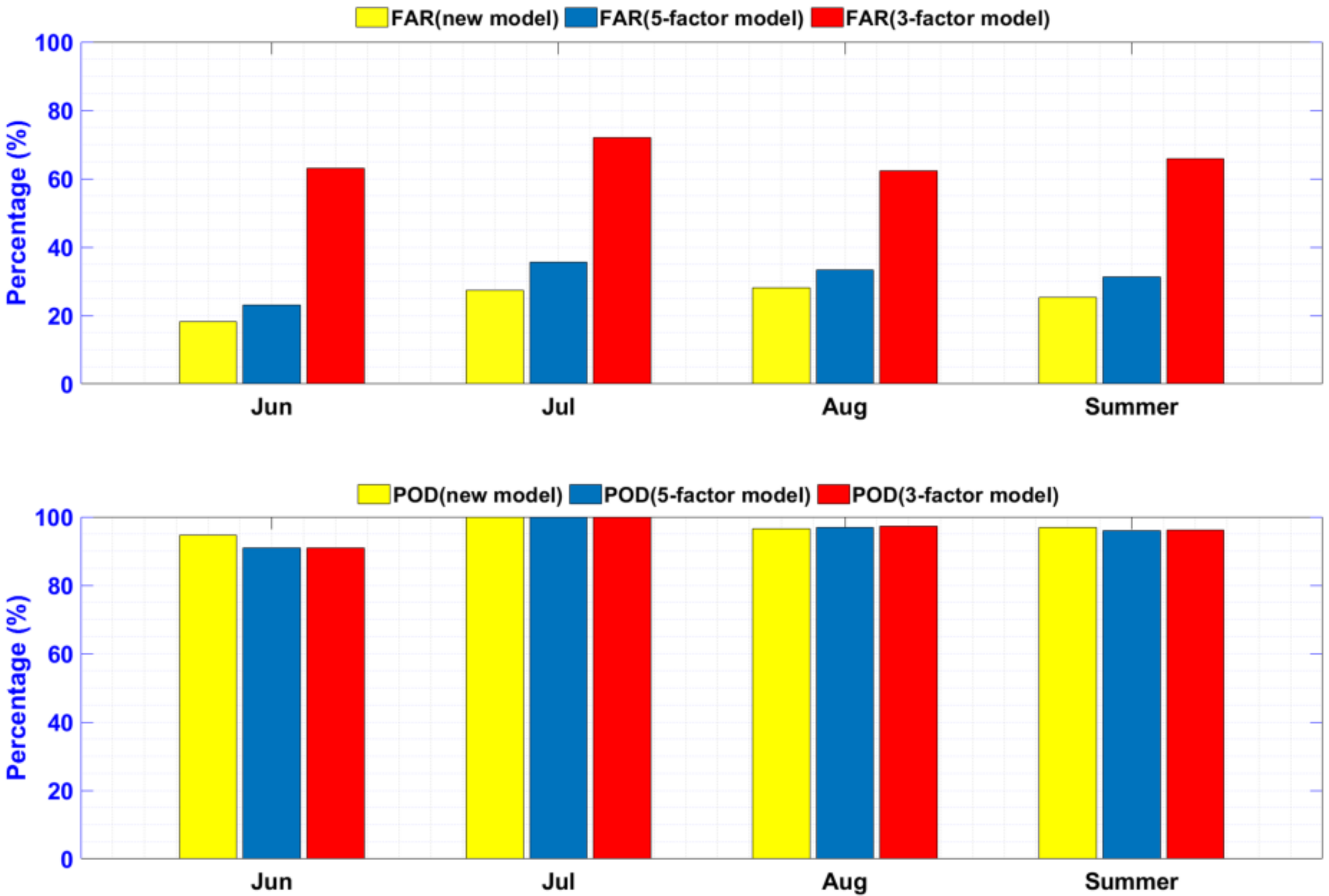
4.2.2. Test Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bevis, M.; Businger, S.; Herring, T.; Rocken, C.; Anthes, R.; Ware, R. GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Bonafoni, S.; Biondi, R.; Brenot, H.; Anthes, R. Radio occultation and ground-based GNSS products for observing, understanding and predicting extreme events: A review. Atmos. Res. 2019, 230, 104624. [Google Scholar] [CrossRef]
- Cardellach, E.; Oliveras, S.; Rius, A.; Tomás, S.; Ao, C.O.; Franklin, G.W.; Iijima, B.A.; Kuang, D.; Meehan, T.K.; Padullés, R.; et al. Sensing Heavy Precipitation With GNSS Polarimetric Radio Occultations. Geophys. Res. Lett. 2019, 46, 1024–1031. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Xu, T.; Wang, N.; Jiang, C.; Du, Y.; Nie, W.; Xu, G. Spatiotemporal evaluation of GNSS-R based on future fully operational global multi-GNSS and Eight-LEO constellations. Remote Sens. 2018, 10, 67. [Google Scholar] [CrossRef] [Green Version]
- Baker, H.C.; Dodson, A.H.; Penna, N.T.; Higgins, M.; Offiler, D. Ground-based GPS water vapour estimation: Potential for meteorological forecasting. J. Atmos. Sol. Terr. Phys. 2001, 63, 1305–1314. [Google Scholar] [CrossRef]
- Gradinarsky, L.P.; Johansson, J.; Bouma, H.; Scherneck, H.-G.; Elgered, G. Climate monitoring using GPS. Phys. Chem. Earth 2002, 27, 335–340. [Google Scholar] [CrossRef]
- Zhang, K.; Manning, T.; Wu, S.; Rohm, W.; Silcock, D.; Choy, S. Capturing the Signature of Severe Weather Events in Australia Using GPS Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sen. 2015, 8, 1839–1847. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Yao, W.; Yao, Y. Hourly rainfall forecast model using supervised learning algorithm. IEEE Tran. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Rohm, W.; Yuan, Y.; Biadeglgne, B.; Zhang, K.; Le Marshall, J. Ground-based GNSS ZTD/IWV estimation system for numerical weather prediction in challenging weather conditions. Atmos. Res. 2013, 138, 414–426. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Li, Z.; Cheng, Y.; Li, L.; Yuan, H. The correlation between GNSS-derived precipitable water vapor and sea surface temperature and its responses to El Niño–Southern Oscillation. Remote Sens. Environ. 2018, 216, 1–12. [Google Scholar] [CrossRef]
- Hagemann, S.; Bengtsson, L.; Gendt, G. On the determination of atmospheric water vapor from GPS measurements. J. Geophys. Res. 2003, 108, D214678. [Google Scholar]
- Jin, S.; Park, J.; Cho, J.-H.; Park, P.-H. Seasonal variability of GPS-derived zenith tropospheric delay (1994–2006) and climate implications. J. Geophys. Res. 2007, 112, D09110. [Google Scholar] [CrossRef]
- Nilsson, T.; Elgered, G. Long-term trends in the atmospheric water vapor content estimated from ground-based GPS data. J. Geophys. Res. 2008, 113, D19101. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, K.; Wu, S.; Fan, S.; Cheng, Y. Water vapor-weighted mean temperature and its impact on the determination of precipitable water vapor and its linear trend. J. Geophys. Res. Atmos. 2016, 121, 833–852. [Google Scholar] [CrossRef]
- Yao, Y.; Shan, L.; Zhao, Q. Establishing a method of short-term rainfall forecasting based on GNSS-derived PWV and its application. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Yao, W. GPS-based PWV for precipitation forecasting and its application to a typhoon event. J. Atmos. Sol. Terr. Phy. 2018, 167, 124–133. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Wu, S.; Zhang, K.; Chen, X.; Qiu, C.; Zhang, S.; Zhang, J.; Xie, M.; Li, L. Development of an Improved Model for Prediction of Short-Term Heavy Precipitation Based on GNSS-Derived PWV. Remote Sens. 2020, 12, 4101. [Google Scholar] [CrossRef]
- Sangiorgio, M.; Barindelli, S.; Biondi, R.; Solazzo, E.; Realini, E.; Venuti, G.; Guariso, G. Improved extreme rainfall events forecasting using neural networks and water vapor measures. In Proceedings of the 6th International conference on Time Series and Forecasting (ITISE-2019), Granada, Spain, 25–27 September 2019; pp. 820–826. [Google Scholar]
- Liu, Y.; Zhao, Q.; Yao, W.; Ma, X.; Yao, Y.; Liu, L. Short-term rainfall forecast model based on the improved Bp–nn algorithm. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef]
- Benevides, P.; Catalao, J.; Nico, G. Neural network approach to forecast hourly intense rainfall using GNSS precipitable water vapor and meteorological sensors. Remote Sens. 2019, 11, 966. [Google Scholar] [CrossRef] [Green Version]
- Manandhar, S.; Dev, S.; Lee, Y.H.; Meng, Y.S.; Winkler, S. A data-driven approach for accurate rainfall prediction. IEEE Tran. Geosci. Remote Sens. 2019, 57, 9323–9331. [Google Scholar] [CrossRef] [Green Version]
- Kuo, Y.; Guo, Y.; Westwater, E. Assimilation of precipitable water measurements into a mesoscale numerical model. Mon. Weather Rev. 1993, 121, 1215–1238. [Google Scholar] [CrossRef] [Green Version]
- Smith, T.; Benjamin, S.; Gutman, S.; Sahm, S. Short-range forecast impact from assimilation of GPS-IPW observations into the Rapid Update Cycle. Mon. Weather Rev. 2007, 135, 2914–2930. [Google Scholar] [CrossRef]
- Rohm, W.; Guzikowski, J.; Wilgan, K.; Kryza, M. 4DVAR assimilation of GNSS zenith path delays and precipitable water into a numerical weather prediction model WRF. Atmos. Meas. Tech. 2019, 12, 345–361. [Google Scholar] [CrossRef] [Green Version]
- Benjamin, S.G.; Weygandt, S.S.; Brown, J.M.; Hu, M.; Alexander, C.R.; Smirnova, T.G.; Olson, J.B.; James, E.P.; Dowell, D.C.; Grell, G.A.; et al. A North American Hourly Assimilation and Model Forecast Cycle: The Rapid Refresh. Mon. Weather Rev. 2016, 144, 1669–1694. [Google Scholar] [CrossRef]
- Shaffie, S.; Mozaffari, G.; Khosravi, Y. Determination of extreme precipitation threshold and analysis of its effective patterns (case study: West of Iran). Nat. Hazards 2019, 99, 857–878. [Google Scholar] [CrossRef]
- Benevides, P.; Catalao, J.; Miranda, P. On the inclusion of GPS precipitable water vapour in the nowcasting of rainfall. Nat. Hazard Earth Syst. 2015, 15, 2605–2616. [Google Scholar] [CrossRef] [Green Version]
- Yeh, T.K.; Shih, H.C.; Wang, C.S.; Choy, S.; Chen, C.H.; Hong, J.S. Determining the precipitable water vapor thresholds under different rainfall strengths in Taiwan. Adv. Space Res. 2018, 61, 941–950. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Ma, X.; Yao, W.; Yao, Y.; Li, X. An Improved Rainfall Forecasting Model Based on GNSS Observations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4891–4900. [Google Scholar] [CrossRef]
- Hubert, M.; Vandervieren, E. An adjusted boxplot for skewed distributions. Comput. Statist. Data Anal. 2008, 52, 5186–5201. [Google Scholar] [CrossRef]
- Shi, J.; Xu, C.; Guo, J.; Gao, Y. Real-time GPS precise point positioning-based precipitable water vapor estimation for rainfall monitoring and forecasting. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3452–3459. [Google Scholar]
- Jin, S.; Li, Z.; Cho, J. Integrated water vapor field and multiscale variations over China from GPS measurements. J. Appl. Meteorol. Clim. 2008, 47, 3008–3015. [Google Scholar] [CrossRef]
- Manandhar, S.; Lee, Y.H.; Meng, Y.S. GPS-PWV Based Improved Long-Term Rainfall Prediction Algorithm for Tropical Regions. Remote Sens. 2019, 11, 2643. [Google Scholar] [CrossRef] [Green Version]
- Ding, J. Review of Weather Prediction Verifying Techniques. J. Nanjing Inst. Meteorol. 1995, 18, 143–150. [Google Scholar]
- Böhm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric Correction for the Troposphere and the Stratosphere in Radio Ranging of Satellites. Geophys. Monogr. 1972, 15, 247–251. [Google Scholar]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.; Anthes, R.; Rocken, C.; Ware, R. GPS Meteorology: Mapping Zenith Wet Delays onto Precipitable Water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Chen, Y. Inversing the content of vapor in atmosphere by GPS observations. Mod. Surv. Mapp. 2005, 28, 3–6. [Google Scholar]
- Donaldson, R.; Dyer, R.; Kraus, M. Objective evaluator of techniques for predicting severe weather events. Bull. Amer. Meteorol. Soc. 1975, 56, 755. [Google Scholar]
- Gilleland, E.; Ahijevch, D.; Brown, B.; Casati, B.; Ebert, E. Intercomparison of Spatial Forecast Verification Methods. Weather Forecast. 2009, 24, 1416–1430. [Google Scholar] [CrossRef]
- Doswell Iii, C.; Davies-Jones, R.; Keller, D. On Summary Measures of Skill in Rare Event Forecasting Based on Contingency Tables. Weather Forecast. 1990, 5, 576–585. [Google Scholar] [CrossRef] [Green Version]
- Manandhar, S.; Dev, S.; Lee, Y.; Winkler, S.; Meng, Y. Systematic study of weather variables for rainfall detection. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 3027–3030. [Google Scholar]
- Tomassini, M.; Gendt, G.; Dick, G.; Ramatschi, M.; Schraff, C. Monitoring of integrated water vapour from ground-based GPS observations and their assimilation in a limited-area NWP model. Phys. Chem. Earth 2002, 27, 341–346. [Google Scholar] [CrossRef]
- WMO. Guidelines for Nowcasting Techniques; No. 1198; World Meteorological Organization: Geneva, Switzerland, 2017; Available online: https://library.wmo.int/doc_num.php?explnum_id=3795 (accessed on 25 March 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result Type | Threshold Type | Month | No. of Correct Predictions (n11) | No. of Misdiagnosis Predictions (n12) | No. of Omissive Predictions (n21) | POD (%) | FAR (%) |
|---|---|---|---|---|---|---|---|
| Fitting Results | Monthly threshold | Jun | 40 | 14 | 9 | 81.6 | 25.9 |
| Jul | 56 | 48 | 7 | 88.9 | 46.2 | ||
| Aug | 73 | 70 | 9 | 89.0 | 49.0 | ||
| Summer | 169 | 132 | 25 | 87.1 | 43.9 | ||
| Diurnal threshold | Jun | 47 | 12 | 6 | 88.7 | 20.3 | |
| Jul | 41 | 19 | 2 | 95.3 | 31.7 | ||
| Aug | 58 | 24 | 5 | 92.1 | 29.3 | ||
| Summer | 146 | 55 | 13 | 91.8 | 27.4 | ||
| Prediction Results | Monthly threshold | Jun | 23 | 53 | 6 | 79.3 | 69.7 |
| Jul | 27 | 46 | 5 | 84.4 | 63.0 | ||
| Aug | 32 | 76 | 7 | 82.1 | 70.4 | ||
| Summer | 82 | 175 | 18 | 82 | 68.1 | ||
| Diurnal threshold | Jun | 26 | 47 | 5 | 83.9 | 64.4 | |
| Jul | 23 | 33 | 3 | 88.5 | 58.9 | ||
| Aug | 34 | 42 | 4 | 89.5 | 55.3 | ||
| Summer | 83 | 122 | 12 | 87.4 | 59.5 |
| Model Type | Month | No. of Correct Predictions (n11) | No. of Misdiagnosis Predictions (n12) | No. of Omissive Predictions (n21) | CSI (%) | POD (%) | FAR (%) |
|---|---|---|---|---|---|---|---|
| Monthly model (3-factor) | Jun | 20 | 34 | 2 | 35.7 | 90.9 | 63.0 |
| Jul | 21 | 54 | 0 | 28.0 | 100 | 72.0 | |
| Aug | 35 | 58 | 1 | 37.2 | 97.2 | 62.4 | |
| Summer | 76 | 146 | 3 | 33.8 | 96.2 | 65.8 | |
| Monthly model (5-factor) | Jun | 20 | 6 | 2 | 71.4 | 90.9 | 23.1 |
| Jul | 18 | 10 | 0 | 64.3 | 100 | 35.7 | |
| Aug | 32 | 16 | 1 | 65.3 | 97.0 | 33.3 | |
| Summer | 70 | 32 | 3 | 66.7 | 95.9 | 31.4 | |
| New model | Jun | 18 | 4 | 1 | 78.3 | 94.7 | 18.2 |
| Jul | 16 | 6 | 0 | 72.7 | 100 | 27.3 | |
| Aug | 28 | 11 | 1 | 70.0 | 96.6 | 28.2 | |
| Summer | 62 | 21 | 2 | 72.9 | 96.9 | 25.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, X.; Wu, S.; Zhang, K.; Fu, E.; Xu, Y.; Qiu, C.; Zhang, J.; Li, L. A New Method for Determining an Optimal Diurnal Threshold of GNSS Precipitable Water Vapor for Precipitation Forecasting. Remote Sens. 2021, 13, 1390. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13071390
Li H, Wang X, Wu S, Zhang K, Fu E, Xu Y, Qiu C, Zhang J, Li L. A New Method for Determining an Optimal Diurnal Threshold of GNSS Precipitable Water Vapor for Precipitation Forecasting. Remote Sensing. 2021; 13(7):1390. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13071390
Chicago/Turabian StyleLi, Haobo, Xiaoming Wang, Suqin Wu, Kefei Zhang, Erjiang Fu, Ying Xu, Cong Qiu, Jinglei Zhang, and Li Li. 2021. "A New Method for Determining an Optimal Diurnal Threshold of GNSS Precipitable Water Vapor for Precipitation Forecasting" Remote Sensing 13, no. 7: 1390. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13071390