
UAV-Based Remote Sensing Applications for Bridge Condition Assessment


Sustainable Civil Infrastructure Research Group, Department of Civil and Environmental Engineering, Research Institute of Sciences and Engineering, University of Sharjah, Sharjah P.O. Box 27272, United Arab Emirates
*
Author to whom correspondence should be addressed.
Remote Sens. 2021, 13(9), 1809; https://0-doi-org.brum.beds.ac.uk/10.3390/rs13091809
Submission received: 23 March 2021
/
Revised: 28 April 2021
/
Accepted: 2 May 2021
/
Published: 6 May 2021
(This article belongs to the Special Issue Bridge Monitoring Using Remote Sensors)
Abstract
:Deterioration of bridge infrastructure is a serious concern to transport and government agencies as it declines serviceability and reliability of bridges and jeopardizes public safety. Maintenance and rehabilitation needs of bridge infrastructure are periodically monitored and assessed, typically every two years. Existing inspection techniques, such as visual inspection, are time-consuming, subjective, and often incomplete. Non-destructive testing (NDT) using Unmanned Aerial Vehicles (UAVs) have been gaining momentum for bridge monitoring in the recent years, particularly due to enhanced accessibility and cost efficiency, deterrence of traffic closure, and improved safety during inspection. The primary objective of this study is to conduct a comprehensive review of the application of UAVs in bridge condition monitoring, used in conjunction with remote sensing technologies. Remote sensing technologies such as visual imagery, infrared thermography, LiDAR, and other sensors, integrated with UAVs for data acquisition are analyzed in depth. This study compiled sixty-five journal and conference papers published in the last two decades scrutinizing NDT-based UAV systems. In addition to comparison of stand-alone and integrated NDT-UAV methods, the facilitation of bridge inspection using UAVs is thoroughly discussed in the present article in terms of ease of use, accuracy, cost-efficiency, employed data collection tools, and simulation platforms. Additionally, challenges and future perspectives of the reviewed UAV-NDT technologies are highlighted.
1. Introduction
Highway transportation system is a vital element of civil infrastructure, and widely regarded as a key component of the built environment in modern society. Bridge infrastructure, in addition to serving the crucial function of connecting highways, is the most vulnerable constituent of the transportation system. This is often attributed to their exposure to harsh environmental settings as well as heavy loads and traffic volumes that bridges need to sustain. Departments of Transportation are required to manage bridges under time and budget constraints [1]. The safety and serviceability of bridge infrastructure is monitored through periodic inspections, typically conducted at least once every two years. Studies conducted by the U.S. Department of Transportation indicate that out of the 607,380 bridges, nearly 67,000 are classified as structurally deficient whereas approximately 85,000 are considered functionally obsolete [2]. Moreover, close to 89% of the budget approved for the construction and maintenance of bridge infrastructure in 2010 was reserved for the rehabilitation of existing bridges [3]. Consequently, the development of low cost, fast, and non-disruptive solutions for bridge monitoring is a vital issue for several transportation agencies.
Traditional inspection techniques, namely visual inspection, have multiple disadvantages. These are laborious and associated with incomplete assessment due to poor accessibility to critical segments of the bridge, cause traffic disruption, and entail subjectivity in evaluation, among others [4]. Studies have identified these limitations and explored innovative and promising bridge inspection technologies to tackle these challenges. These emerging technologies include non-destructive or non-contact methods such as ground penetrating radars, photogrammetry, laser scanning technology, infrared thermography, sensors, machine vision, and unmanned aerial vehicles (UAVs) [4,5,6,7,8]. These techniques enable remote extraction of useful information of the bridge structural health at numerous locations and orientations. Additionally, precise simulations, charts, models, and renderings depicting the bridge health can be obtained while simultaneously safeguarding the safety of bridge inspection officials. Abu Dabous and Feroz detailed the current state of literature of non-invasive techniques for concrete bridge condition monitoring including defect detection, rebar corrosion, delamination, and cracking [4].
Non-destructive analysis using UAVs have been gaining momentum for bridge monitoring in the recent years, particularly due to improved accessibility and cost efficiency, avoidance of traffic closure, as well as reduced safety hazards during the inspection process [9,10]. They are often deployed in instances where the infrastructure has limited accessibility, characterized by their height and/or location. Several industries, including defense, transportation, archaeology, and precision agriculture, have adopted UAVs for practical applications, whereas industries like structure and construction have only recently begun to realize the prospects of UAVs in engineering applications [11].
2. Related Work
Researchers have acknowledged the increasing interest in drones for various applications related to civil engineering disciplines [12]. Studies have explored the viability and usefulness of aerial inspection for civil infrastructure monitoring, construction management and safety, traffic monitoring and surveillance, geotechnical site reconnaissance, and post-disaster inspection, among others. Sony et al. reviewed smart sensing tools including cameras, drones, smartphones, and robotic sensors for supervision, retrofitting, and management of large-scale structures [13]. Another study presented the UAV practices adopted for the United States bridge inspection programs [14]. Rakha and Gorodetsky studied the existing practices associated with building inspection using thermal imaging aided by unmanned aerial systems [15]. Similarly, Zhou and Gheisari summarized the construction applications of aerial systems, particularly their viability in building maintenance and inspection, damage appraisal, site reconnaissance, and progress monitoring [16]. Another study examined the progress of autonomous robotic platforms and sensors, including unmanned aerial and submersible systems, for the structural health monitoring of bridges. Lastly, Jeong et al. reviewed the suitability of UAVs and associated image processing algorithms for the bridge inspection and damage quantification [17]. Table 1 summarizes existing review studies conducted to identify the current state of literature related to UAV applications in the realm of civil engineering.
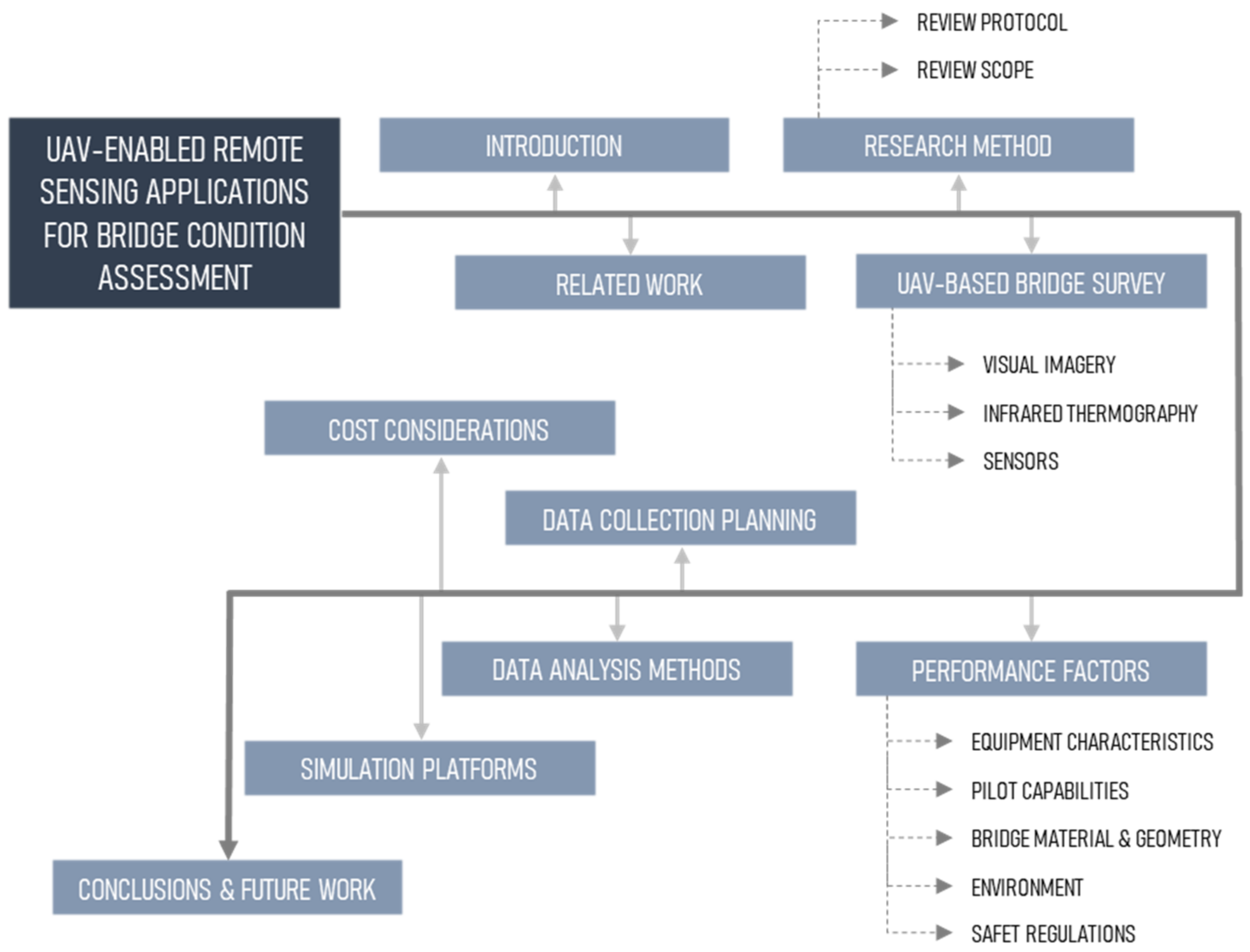
Existing literature have analyzed the general aspects of UAV applications associated with construction industry and built environment [13,14,16]. Recent research have also focused on analysis algorithms based on data collected using UAVs [17]. To the author’s knowledge, the existing literature lacks a specialized review that considers all aspects of integrating remote sensing techniques and the associated hardware on-board UAVs that can potentially be used for bridge condition assessment, including data collection and processing methods, cost facets, UAV performance factors, and software platforms. Hence, this review paper is intended to address the paradigm shift in bridge inspection and condition monitoring arising from the utilization of UAV-based remote sensing. This study aims to address key research aspects including UAV-based non-destructive inspection, data acquisition methods, data processing techniques, cost considerations, UAV performance factors and simulation platforms. This endeavor is a continuation of previous research work and compliments the review conducted with regards to bridge inspection using non-contact testing (NCT) technologies [4]. The structure of this article shown in Figure 1 includes the following main elements: first, an introduction of previous work followed by the research methodology. The methodology highlights the review scope and protocol and presents details of studies’ selection criteria and quality assurance. Secondly, an in-depth critical analysis of the application of UAV-based non-destructive bridge monitoring is conducted. Numerous non-destructive testing (NDT) techniques, including infrared thermography (IRT), Light Detection and Ranging (LiDAR) technology, visual imaging (VI), and other sensors used in confluence with drones are discussed. These include the analysis of stand-alone as well as integrated NDT-UAV systems. Subsequently, data acquisition, processing and the software platforms utilized are summarized, followed by the analysis of factors affecting UAV performance. Finally, the paper concludes with challenges and limitations facing the application of UAV-based methods for bridge condition monitoring, as well as future recommendations for research and development.
3. Research Method
3.1. Scope of the Review
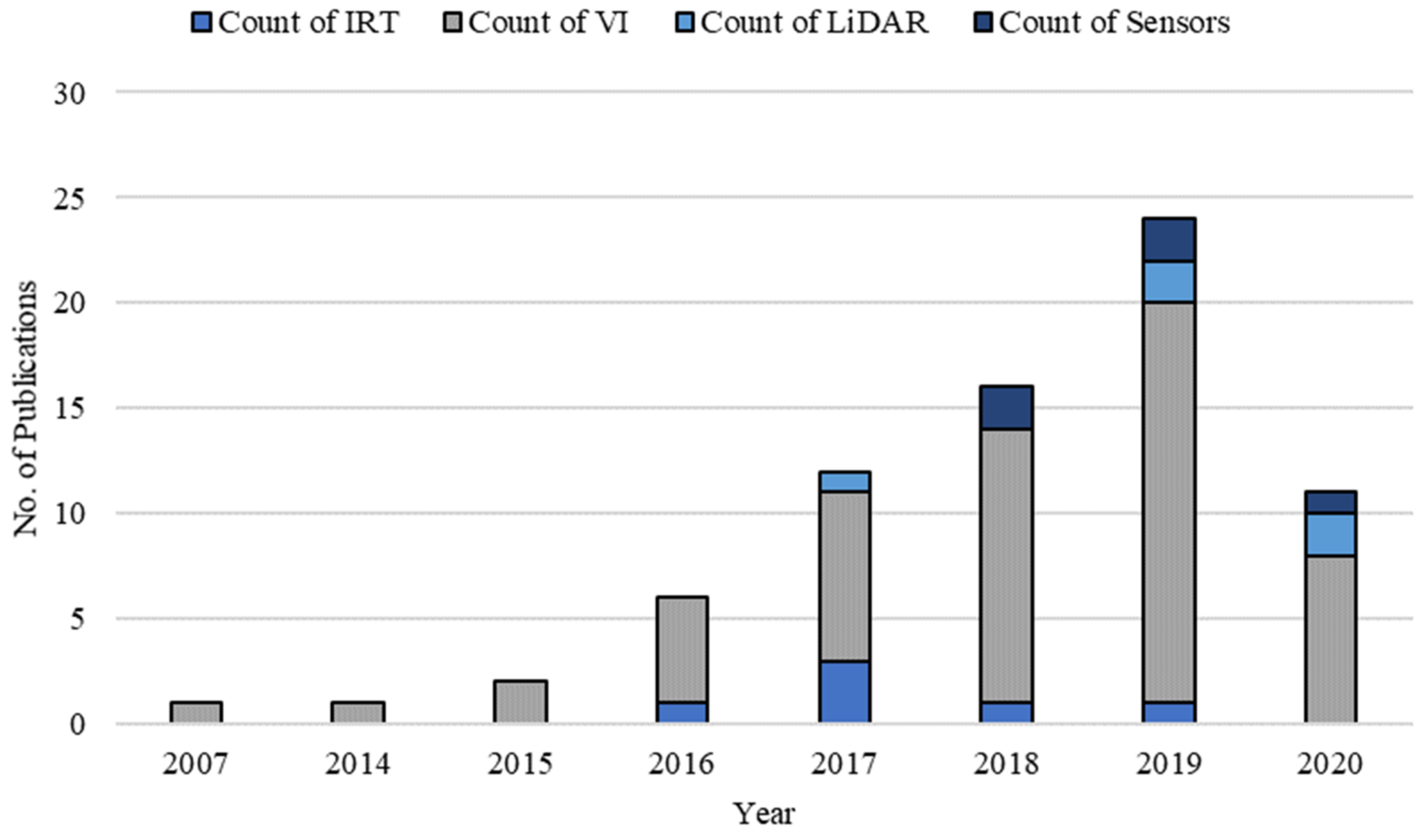
The present review focuses on identifying the current state of literature in non-destructive bridge inspection and monitoring using UAV systems, and addresses a recommended future expansion of previous work that explored terrestrial non-contact technologies [4]. This study explores non-destructive technologies (NDTs) that can be mounted on UAVs for bridge monitoring and data collection including infrared systems, VI devices, LiDAR, and other sensors. Sixty-five conference and journal articles published worldwide, during the study period of 2000 to 2020, were analyzed. Figure 2 illustrates the distribution of the compiled NDT-based UAV studies over the course of the study period. Evidently, interest in this domain of research has been increasing recently; 80% of the reviewed studies were conducted in the past three years.
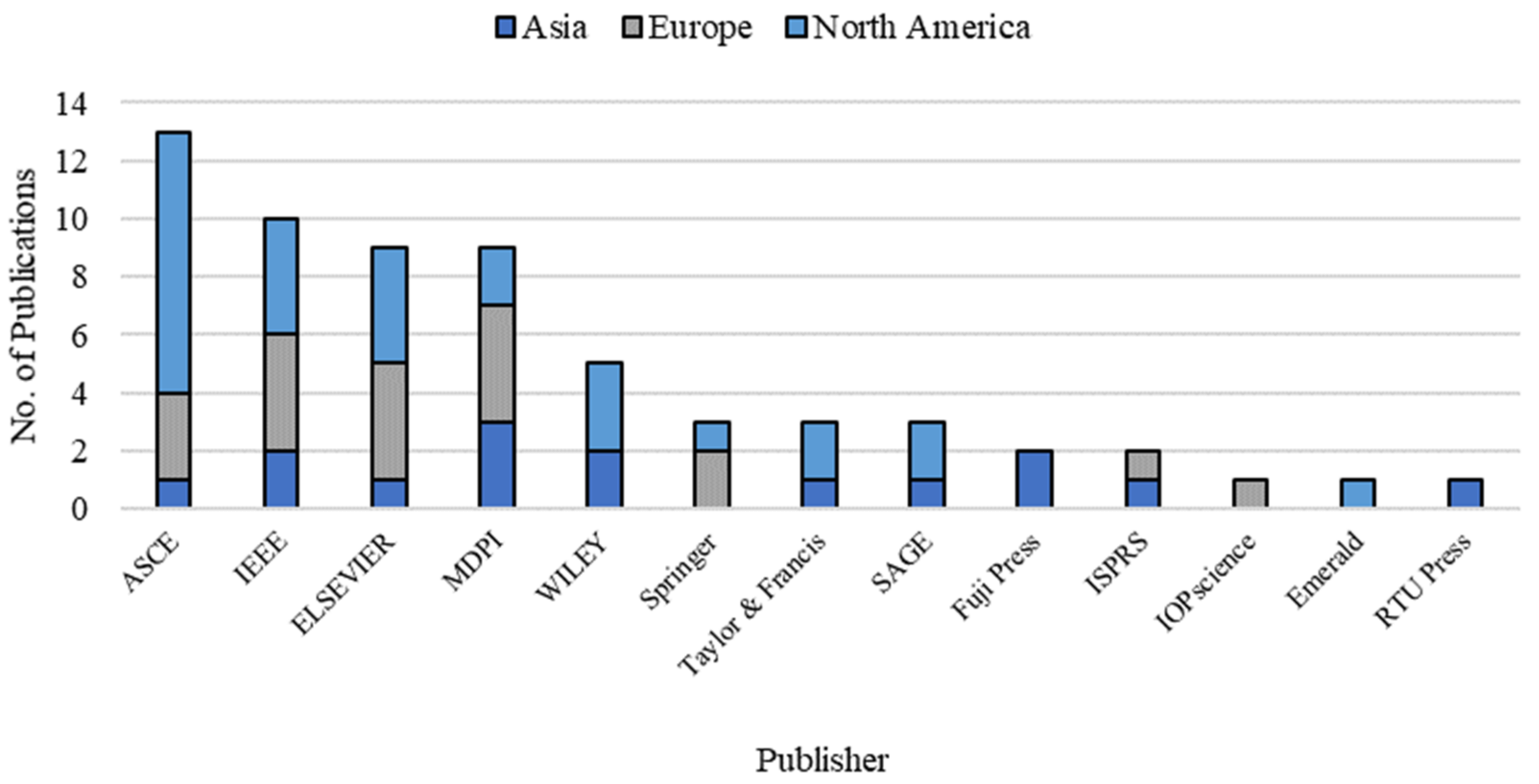
Figure 3 provides an overview of the region-based distribution of the compiled articles and provides the publisher count. North America had the highest number of publications during the study period (twenty-eight articles), majority of them being conducted in the United States, followed by Europe (nineteen articles) and Asia (fifteen articles). The figure illustrates the publishing house portraying the descending order of the number of studies published dealing with the UAV applications in bridge monitoring. It can be observed that ASCE is the leading publisher in this category with thirteen published papers, nine of which were conducted in North America, three in Europe, and one in Asia. This is followed by IEEE with ten published articles and Elsevier and MDPI with nine articles each. Appendix A illustrates the research data extracted from the compiled studies including year of publication, publication type, type of utilized NDT technique, method of validation, test object, type of measurement, data acquisition tools, software platforms, and data processing algorithms including artificial intelligence or machine learning techniques.
3.2. Research Questions
The fundamental objective of this review is to identify and evaluate published studies that tackle the application of UAVs in bridge condition assessment. To accomplish this, five specific research questions have been formulated: (1) What are the different applications of UAVs in bridge condition assessment? (2) Which particular NDT techniques are used in tandem with UAVs for the condition assessment? (3) What are the numerous factors affecting the UAV performance during monitoring? (4) How should the data collection and analyses be conducted? and (5) What are the strengths and limitations of UAV deployment for bridge monitoring?
3.3. Review Protocol
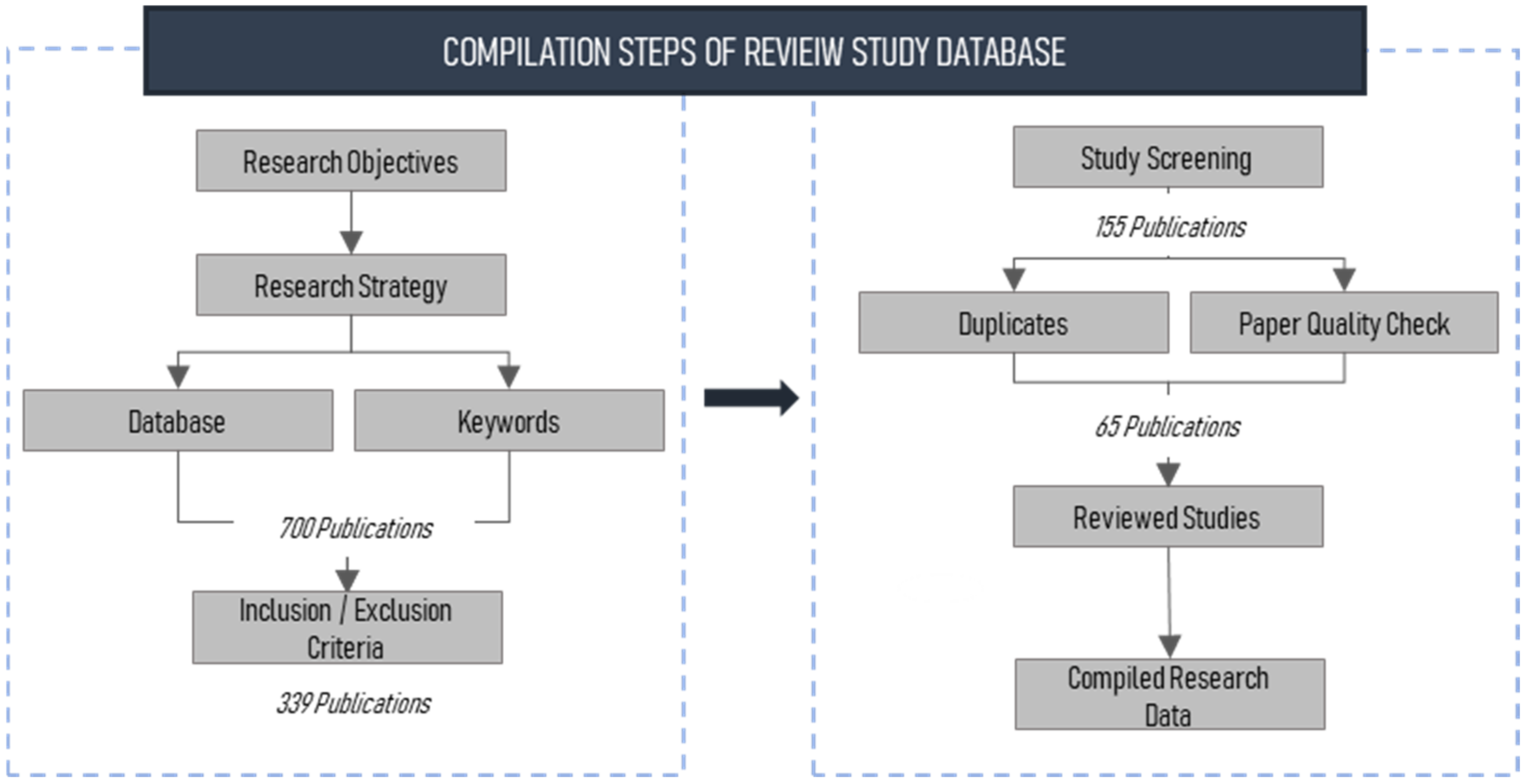
Figure 4 illustrates the protocol followed during the compilation process of the review study database. The studies were retrieved primarily from Google Scholar, Scopus, and Web of Science databases. The studies compiled for this review were extracted using a combination of the following search keywords: “Unmanned Aerial Vehicles”, “Unmanned Aerial Systems”, “Drones”, “Remotely Piloted Aircrafts”, “Aerial Vehicles”, “Aerial Systems”, “Non-contact Technologies”, “Non-destructive Technologies”, “Bridge Inspection”, “Bridge Monitoring”, “Structural Health Monitoring”, “Bridge Condition Monitoring”, “Bridge Damage Quantification”, and “Bridge Deterioration”. The keywords were initially identified based on the authors’ knowledge of the research area. Subsequent to the retrieval of the first set of articles, additional keywords from the extracted studies were used to retrieve more articles. The two-step technique for identifying keywords was adopted to obtain a comprehensive set of relevant articles in this field of research. Preliminary search revealed close to 700 studies on this topic. Screening of irrelevant/duplicate studies retained a total of one hundred and fifty-five articles relevant to the scope of work. Finally, after abstract and full-text screening, sixty-five articles were selected for review.
4. Bridge Survey Using Unmanned Aerial Vehicles
UAVs can be defined as aircrafts that operate or function without an on-board pilot. Although they are also widely known as drones, remote piloted aircrafts (RPA), or unmanned aerial systems (UAS), there are subtle differences between each terminology. Drones typically refer to any remotely controlled vehicle including submarines or surface-based autonomous vehicles, whereas a UAV is an aircraft capable of flying remotely or autonomously over long distances with the aid of a control device transmitting live feed [22]. On the other hand, UAS refers to the complete system that encompasses UAVs and drones, the ancillary units, as well as the operator on ground. Initially used in military applications, they have been gradually moving towards commercial and consumer use over the past decade which has provided several opportunities for built environment disciplines [23]. UAVs equipped with NDTs or remote sensing mechanisms offer inspection and monitoring capabilities for engineers, decision makers, stakeholders, and owners of bridge infrastructure to survey and document structural condition, assess safety performance, and deploy mitigation and rehabilitation strategies if and when necessary. On the basis of the articles reviewed in this study, the NDT technologies frequently incorporated with drones for bridge inspection are presented in this section. Visual imaging techniques, consisting of photo and video cameras, were the most commonly used NDT techniques for drone-based data acquisition, followed by IRT, LiDAR, and sensors (refer to Figure 2). The present section also discusses studies that explored the comparison and integration of multiple NDT-UAV systems. The initial analysis of the current study attempted to identify the major areas of application of the NDT-UAV in monitoring bridge condition. The analysis indicated that majority of the applications focused on the detection of cracks on bridge structures. Geometric measurement of bridge elements was another important application, followed by general inspection, defect quantification, and identification of moisture ingress. Delamination detection, damage localization, displacement measurement, identification of spalled surfaces, risk assessment, and maintenance of a progress log are other useful function NDT-UAVs can serve. Figure 5 gives an overview of the NDT-UAV applications in bridge condition monitoring.
4.1. Visual Imagery
Visual imagery, analogous with photogrammetry, deals with the acquisition of graphics, videos, and other visual information. These are usually acquired with the aid of still image cameras, video cameras, mobile phones, and so on. Figure 6 illustrates data collection using a UAV mounted with visual imagery equipment and a sample of the acquired data. Majority of the studies utilized visual imagery for data acquisition onboard drones. One such study proposed 3D scene reconstruction to eliminate perspective and geometry distortion arising from UAV-based imagery of non-fat regions as well as to facilitate crack localization [24]. At short distances, the cracks observed on the 3D model (including narrow cracks) corresponded to the original cracks on the structure. A similar distribution was obtained for the relative error of crack identification when comparing the developed approach with images acquired using hand-held DSLR. Duque et al. assessed the feasibility of a VI-UAV system for bridge damage detection and quantification [9]. The accuracy of the pixel- and photogrammetry-based quantification of crack lengths, thicknesses, and rust stain were observed to be comparable to field measurements. However, the study noted that the pixel-based approach required capturing images aligned to the damage for accurate results, whereas the photogrammetric method was time consuming with regards to 3D model generation. Similarly, Dorafshan et al. reported that although the number of cracks identified by UAV inspection was comparable to human inspection, UAV experiments were time-consuming and returned more false positives [25]. On the other hand, a study by Zhong et al. demonstrated that concrete crack measurement using airborne images acquired via a VI-UAV system was more reliable compared to those obtained from traditional counterparts, like static images and crack width measurement device [26]. Similarly, Seo et al. reported that VI-UAV based bridge condition monitoring was efficient at damage identification while simultaneously being more cost-effective compared to traditional techniques [27]. The study followed a five-stage inspection methodology, including bridge information review, site risk assessment, drone pre-flight setup, drone-enabled bridge inspection, and damage identification.
Jalinoos et al. utilized a camera-borne drone for post hazard damage evaluation of bridge infrastructure exposed to extreme geologic and hydraulic events [28]. The proposed approach reported high accuracy in detecting the simulated translation, rotation, and settlement of bridge structure. The results indicated average absolute differences between measured and estimated values of 0.7 cm, 1 cm, and 1.4 cm in the direction of translation, rotation, and settlement, respectively. A similar study employed UAVs for bridge scour damage assessment arising from flood exposure. Hackl et al. demonstrated that abutment scour and overflow can be accurately modelled using UAV photogrammetry [29]. Another study recommended a system capable of quantifying scours with considerable accuracy and minimized implementation costs [30]. Seo et al. compared the usefulness of images acquired from aerial inspection versus traditional visual inspection report in detecting concrete cracks, spalling, salt deposit and moisture damage [10]. The study observed that UAV-enabled deterioration detection was more accurate and certain damages were not reported in the visual inspection report, especially moisture-related damage on bridge girder. A VI-UAV based framework for the detection of excessive corrosion on steel bridges was developed by Marchewka et al. [31]. The development of a rust color model of the corroded surface indicated 96% accuracy. However, it was noted that long-term studies would be required to firmly validate the proposed method. A video-based UAS for the displacement monitoring of bridge structure was explored [32]. The proposed approach eliminated the disadvantages associated with field stationary cameras including finding an optimal location to install the camera with sufficient line of-sight. Experimentation on a railroad bridge indicated accurate results, resulting in a root mean square (RMS) error of 2.14 mm. Another study proved that RGB cameras on aerial systems have damage detection capabilities similar to visual inspections [33].
Another study explored autonomous flight control of a video camera-borne UAV for crack detection [34]. The study also developed an adaptive control method which ensures that stable performance is maintained in instances where the payload of the UAV is changed. A similar study of autonomous bridge inspection was conducted by Tomiczek et al. utilizing a camera-mounted UAV embedded with laser range finder and optical flow sensor [35]. The study recommended 3D reconstruction of particular damages rather than full-scale models to enhance accuracy as well as to reduce data storage necessities and time constraint issues. Morgenthal et al. developed a framework for the automation of UAV-enabled condition monitoring [36]. High-resolution geo-referenced 3D models were generated using photogrammetry, autonomous flight control and machine learning based feature detection. The recommended approach was capable of mapping crack patterns and identifying the effects of load on the structure. Few studies verified the accuracy of VI-UAV based results compared to LiDAR [37,38,39]. Khaloo et al. compared image-based UAV with TLS for inspection documentation and damage detection [37]. The results indicated that 3D model generated from LiDAR demonstrated low point density, incomplete data and poor resolution compared to the VI-UAV. This was attributed to the limited positions, in terms of level and stable terrain, available for LiDAR deployment, which inhibited full coverage of the bridge structure. Additionally, recurrently changing scanning positions of the LiDAR equipment made the data collection procedure time-consuming. These observations corroborated with the study conducted by Chen et al. that compared VI-UAV and terrestrial laser scanner (TLS) based bridge inspection [38]. However, the study reported longer durations of data processing associated with the UAV data.
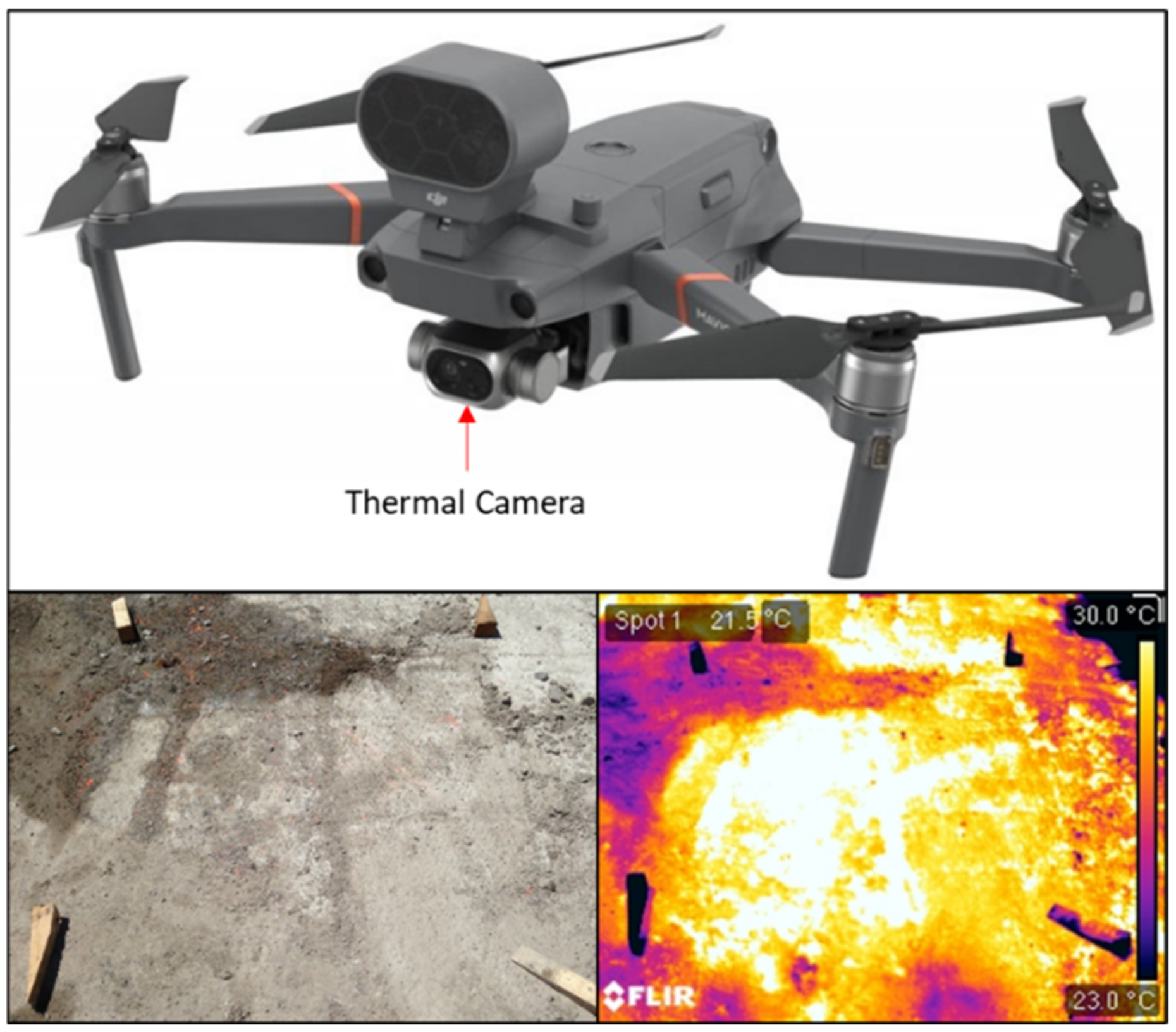
4.2. Infrared Thermography
IRT is an NCT technology capable of sub-surface damage detection [4,40]. Figure 7 illustrates an IRT-based UAV system and a sample of the IRT data acquired. This technique distinguishes between delaminated and non-delaminated concrete/pavement surfaces based on the temperature gradient of the surfaces under natural (passive thermography) or artificial (passive thermography) heat exposure. Areas above delamination will be identified as hotter than corresponding areas above sound concrete as delamination disrupts heat transfer. Very few studies explored the utilization of thermography-based UAVs in bridge condition monitoring. One such study acquired thermal images of two in-service concrete bridge decks using a low altitude aircraft mounted with an IR camera [41]. The areas of subsurface defects identified by the IRT-UAV system were validated against traditional techniques such as half-cell potential (HCP) and hammer sounding. The results indicated that hammer sounding was approximately 9% more accurate in delamination detection compared to IRT-UAVs. On the other hand, the proposed system demonstrated 6 to 8% higher accuracy when detecting subsurface defects compared to HCP which was attributed to the latter’s capability of only detecting areas with advanced corrosion activity. Another study analyzed the usefulness of airborne IRT systems for passive thermography of artificial delamination on a concrete bridge deck specimen [42]. The absolute contrast generated by IRT-UAVs were observed to be slightly less intense when compared to a handheld IRT camera. However, similar to the handheld system, the IRT-UAV was proven to be capable of identifying delamination up to 4 cm deep and having width–depth ratios not less than 1.9. The study also indicated that delamination was observed more clearly in instances where the width–depth ratio was larger due to higher temperature difference being generated.
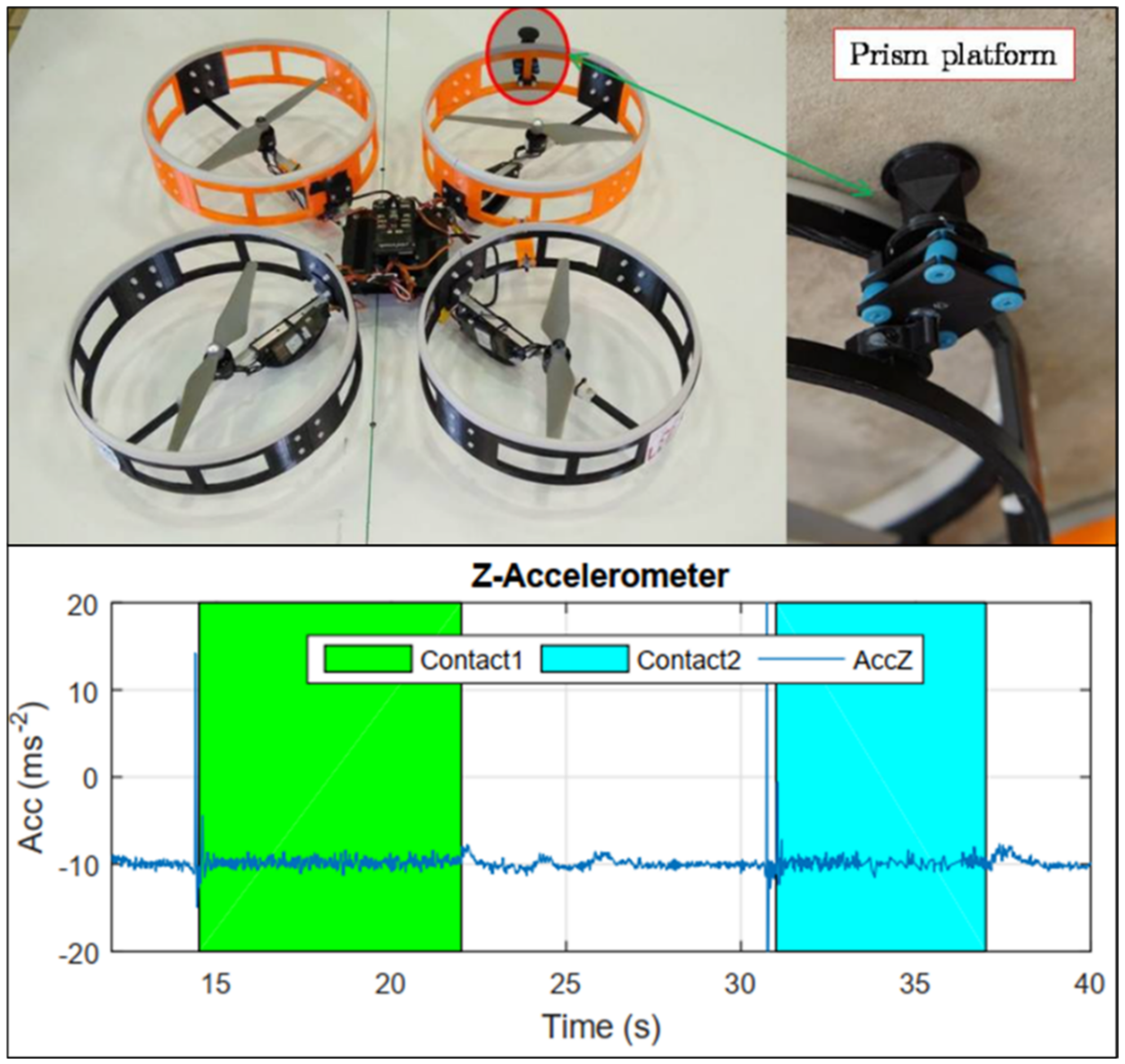
4.3. Other Sensors
Unlike the previously explored technologies, the sensors detailed in this section require physical contact with the bridge structure. Sensor-embedded UAVs function as flying sensors that enable precise measurements when the system comes in contact of the target inspection surface. Figure 8 gives an example of a sensor-embedded UAV and the resulting data acquired. One such study analyzed a UAV system mounted with a reflector prism, the position of which was tracked using a laser-tracking total station, for beam deflection analysis [43]. The study also noted that measurements from different inspections can be compared against each other due to the integration of total station in the system enabling same reference frame for various target structures. A similar study successfully deployed autonomous aerial platform embedded with a reflector prism for contact-based bridge monitoring [44]. Computational fluid dynamic (CFD)-based aerodynamic analysis of the ceiling effect was utilized to optimize the UAV design. The ceiling effect was used to the advantage of the UAV to establish contact and conduct the inspection activities.
Another study deployed UAVs embedded with laser Doppler vibrometer (LDV) to measure dynamic bridge displacement [45]. The proposed system eliminated calibration requirements, creating a noncontact, reference-free moving vibrometers. Signal differences of 5% (peak) and 10% (RMS) were observed between linear variable differential transducers (LVDTs) and the flying LDV, showing close correlation between the proposed and traditional methods. Moreu et al. developed an aerial tap testing system to identify areas of deterioration [46]. The system was capable of remotely impacting the surface and processing the acoustic data for condition monitoring. However, it was noted that drone sounds interfered with the acoustic data of the tap testing procedure and may have marginally impacted the accuracy of the results. Another study focused on inspecting piers and floor slab of a bridge using UAV-based hammering test [47]. The methodology proposed identifying defects by assessing the resonant frequency of the bridge surface. The study also focused on countering the contact force resulting from the hammering test on the UAV as well as enabling autonomous flight control.
4.4. Comparative and Integrated Studies
Stand-alone techniques, although satisfactory in performance, have the disadvantage of flagging false positives in damage detection [4,48]. Integration of various NCT technologies can potentially enhance confidence in identifying and quantifying deterioration as well as improving the reliability of the bridge condition rating process. The technologies can work in tandem with each other, enhancing detection rate and mitigating limitations. Escobar-Wolf et al. studied the potential of integrating visible and IR cameras for damage evaluation [49]. Although stand-alone IRT-UAV system (validated against hammer sounding tests) provided satisfactory results, integration with photogrammetry enhanced performance by eliminating wrongfully mapped delamination regions. However, the study noted that defects detected by the IR system had higher probability of arising from actual delamination, unlike those observed by both IR and visible camera, which may arise from fluctuations in the surface material properties. Another study presented the feasibility of incorporating UAV-borne visual and thermal cameras, as well as laser scanners, to develop a comprehensive condition monitoring system [50]. The UAV-VI enabled crack monitoring and structure texture modelling, whereas the IR sensors allowed detection and classification of humidity-related damage. LiDAR sensors on the other hand were particularly useful for surface reconstruction and deformation detection.
Another study mounted color and IR cameras on a UAV for subsurface delamination detection and quantification [51]. The integrated approach was found to be advantageous at rapid identification of damage location. However, the estimation of delamination sizes was not sufficiently accurate, leading to the conclusion that the proposed methodology may be more suited as a complementary detection technique for ground-based systems. Yoon et. al embedded a UAV system with vision sensor and 1D LiDAR for bridge inspection [52]. A 1D LiDAR utilizes a still laser beam to compute the distance from the sensor to the obstacle on a single axe. The LiDAR sensor was integrated with the purpose of obtaining camera to target distance measurement. The study identified missing regions and damage spots within 10 cm accuracy. The approach detected cracks unnoticed during visual inspection and obtained more precise damage localization results.
5. Factors Affecting UAV Performance
UAV operations are characterized by several factors, including equipment characteristics, pilot protocols, object properties, environment, and safety regulations, that must be considered before their integration into the airspace. Clear understanding of these factors is essential to facilitate safe and efficient operations.
5.1. Equipment Characteristics
Size and design of the aerial system, payload capacity, battery capacity, and control range, including the distance and duration for safe flight, are some of the equipment-related factors affecting UAV performance [53]. The application it is used for guides the relative significance of the performance factors. Optimizing the flight path and selection of control locations are reliant on these factors as well as on the shape and size of the target bridge. The three typical designs of UAVs are fixed-wing, rotorcraft, and vertical take-off and landing (VTOL) vehicles [12]. Fixed-wing drones operate similar to conventional aircrafts, in terms of varying airframes as well. Similarly, rotorcraft UAVs are comparable to helicopters, with rotating propellers connected to the aircraft frame. A variation of this type is the multirotor UAV which has multiple propellors extending from the main body boosting the drone flight. Lastly, VTOL UAVs fuse fixed wing and multirotor designs, where the aircraft is vertically propelled and then fly horizontally. Fixed-wing UAVs can efficiently cover large distances, whereas multirotor UAVs are agile and offer good stability, enabling complex 3D mapping. Rotorcrafts, on the other hand, are challenging for manual flight compared to multirotors which allow easier control, has increased lift capacity, allowing redundancy in the event of motor malfunction. Instability or increased movement of the UAV can result in measurement errors. The platform must be capable of stabilizing itself (for instance, against turbulent winds) when conducting close-range inspections. Typically, the flight duration, often dependent on the payload and battery capacity, is a critical factor to be maximized for any application. On the other hand, flight duration can also be reliant on camera resolution and desired survey quality for surveying applications. This is due to the fact that a shorter flight path is required for those cameras capable of acquiring higher resolution images. Another factor affecting the flight duration is the conveyed capacity. Although UAVs can typically bear payloads higher than that specified by the manufacturer, surpassing the maximum capacity can considerably affect UAV performance resulting in unstable and shorter flights, due to greater energy expended. Several studies used gimbals to improve stability and measurement accuracy of aerial platforms [28,37,51]. In order to optimize the payload capacity of the UAV, cameras, and sensors with in-built gimbal may be considered.
5.2. Pilot Capabilities
The quality of the obtained data is critically dependent on the pilot’s capabilities and comfort during flight operation [53]. The pilot is not permitted to operate UAVs under the influence of alcohol or drugs as well as certain medications or has underlying medical ailments such as epilepsy, hyperventilation, stress, fatigue, dehydration, and heatstroke [54]. Operation under any of these circumstances can result in disruption of smooth operations and loss of perceptual field. The pilot is obliged to complete a physical self-assessment prior to every flight. Often regulations necessitate an assisting observer to reassess the flight paths and safeguard the drone operations. Additionally, education and training of the pilots is essential as this affects the drone control, communication between the on-field team as well as compliance with the safety regulations. The Federal Aviation Administration in 2016 reported that the largest percentage of drone accidents occurred as a result of error on the behalf of the pilot [55]. This primarily stemmed from uncertainty about legal constraints, poor understanding of clearance requirements, and lack of risk mitigation strategies in place.
5.3. Bridge Material and Geometry
Although UAV-based damage identification is applicable to versatile materials (steel, timber, and concrete), numerous bridge elements (deck, abutments, trusses, girders, etc.) and wide range of damage types, steel and timber truss bridges are considered as difficult bridges to be digitized by drone-assisted photogrammetry [27,31]. Tomiczek et al. reported better performance of UAVs when inspecting prestressed concrete girder spans compared to steel girder spans [35]. Possible reasons were attributed to the magnetometer on the UAV being affected by the steel material as well as a lack of texture on the painted steel girders, which may have inhibited the detection potential of the optical flow sensor. It was further noted that certain geometries, such as low-clearance spans with tight girder spacing, may result in low light conditions which was another factor affecting the capabilities of the optical flow sensor. Such instances also have the potential to affect the precise estimation of velocity and position of the aerial systems, thereby deterring autonomous flying under particular geometries. Another study quantified the range of maximum crack to camera distance for the identification of fatigue cracks as 0.3 m (poor-lit conditions) to 1.1 m (well-lit conditions) [25]. Seo et al. suggested rigorous flight planning to avert image overexposure and avoid obstacles as well as attaching flashlights to the system to improve the illumination of poorly lit geometries, such as bridge decks [10]. To combat the loss of GPS data in certain geometries, geotagging position estimation method was utilized [56].
5.4. Environment
Environmental factors, typically weather condition or path obstructions, are some pivotal factors influencing UAV performance for bridge condition monitoring [53]. Precipitation would render the drone inoperable. Gusts of wind, in particular, can highly impact drone stability, resulting in turbulence and compromised data quality, especially in the case of small and light-weight UAVs. Additionally, the mode of flight may switch from automatic to manual which requires trained personnel. One such study maneuvered small UAV weighing 2.5 kg in wind speeds up to 6.7 m/s. Trees, electric wires or other obstacles in the UAV path can hinder the operator’s line of sight as well as affect aircraft safety, which may warrant the addition of control points and flight-route segments [35]. Another study identified excessive windy conditions and overexposure of visual camera to sun or snow as some of the factors affecting UAV performance [27]. Poor GPS connectivity and windy conditions can also result in the loss of autonomous control and acquisition of unclear or fuzzy data leading to difficulties in damage detection [25,35]. Additionally, when flying close to the ground surface, the UAV imaging quality could be affected by the dust particles [57]. Another study recommended wind speeds less than 24.1 km/h for safe operation of UAVs [10]. Appropriate ambient temperature during image acquisition is vital, as extreme cold can affect the aircraft battery performance, thereby reducing flight duration [24,29]. Additionally, it was recommended to conduct the site experiment on cloudy days or in the early hours of the morning to ensure consistent illumination. Salaan et al. developed a UAV encompassed in a passive rotating spherical shell which was capable of withstanding wind speeds up to nearly 36 km/h [58]. The developed system was able to identify 0.1 mm cracks at 0.5 m distances, recover from collisions up to 5 km/h as well as provide complete overhead view enabling data acquisition at any part of the bridge.
5.5. Safety Regulations
The primary obstacle facing the rapid development of UAVs for commercial activities is related to their safety case. In the past decade, a myriad of regulatory agencies supported the implementation of safety regulations to be followed during the operation of UAVs. In 2011, the International Civil Aviation Organization (ICAO) mandated UAVs to apply appropriate government rules and exhibit safety levels comparable to that of manned aerial systems [59]. The Federal Aviation Administration in the United States produced a framework in 2012 enabling commercial usage of UAVs. Meanwhile, the United Nations created an advisory group in 2015, consisting of the United States, France, and China, and industrial organizations to establish international safety regulations to be implemented during unmanned aerial flights [60]. Several countries, including Australia, Brazil, Canada, France, Hong Kong, India, Indonesia, Japan, Malaysia, The Philippines, Republic of Ireland, Singapore, South Africa, South Korea, Thailand, United Kingdom, United States, and Uruguay have initiated some form of regulatory framework for aerial systems [61,62,63,64,65,66]. These regulations stipulate UAV weight and altitude restrictions, safe distances to be maintained from built structures, traffic, and human populace, as well as limit their operations to daytime and within Visual Line of Sight. Many of these regulations also require obtaining pilot licensure and approvals from local authorities before flight. Drone operations over certain areas such as nuclear power plants, penitentiaries, military sites, airports etc., are restricted. However, it should be noted that some of these regulations may be waived under the right circumstances. Overcoming regulatory hurdles, several scientific and engineering professionals have explored the integration of UAV technology into their respective disciplines. These regulations need to be thoroughly deliberated before deploying UAVs as some of these restrictions including traffic related restrictions may affect the data collection process of sections adjacent to roadways, which in turn may require bridge inspectors to apply mitigative measures to avoid incomplete datasets.
6. Data Collection Planning
Calì and Ambu explored elliptical and cylindrical data acquisitions patterns [67]. The results showed that optimal 3D modelling was possible when using cylindrical camera grid. Additionally, the Structure-From-Motion (SfM) algorithms utilized in the study enhanced the accuracy of 3D reconstruction of bridge structure containing extended longitudinal form, geometric peculiarities, and inclined attributes. Another study investigated the usefulness of visual servoing control tactic, capable of differentiating translation and orientation aspects, for autonomous flight of video camera-borne UAV [68]. The data acquired using the proposed technique demonstrated the potential for the detection of cracks as small as 0.1 mm.
Several studies explored autonomous flight [34,36,44,47,69,70]. GPS is commonly used for autonomous flight control. However, they offer poor reliability as satellite connection could be interrupted in certain areas such as at the bottom of bridge decks. Bolourian and Hammad explored automated 3D path planning technique for a LiDAR-borne UAV system to minimize flight time while maximizing visibility and avoiding obstacles [70]. Integrating Genetic Algorithm and A* algorithm enabled prioritizing regions with high risk levels while simultaneously realizing accurate and time-efficient data acquisition. Another study achieved autonomous flight control by constructing a broader coordinate system based on the assimilation of two photographic images which enabled UAV position measurement [34]. Similarly, autonomous flight path was configured using a simple 3D model and satisfying several constraints including collision avoidance, complete structural coverage, sufficient and quality dataset compilation, and optimized flight routes [36]. Another study embedded autopilot components based on GPS signal into a multirotor design [43]. However, to avoid the loss of position information and potential collision under restricted locations, integration of other position estimation sensors such as optical flow or visual odometry was considered.
7. Data Analysis Methods
Few studies focused on developing adequate data processing techniques to complement the UAV-based data acquisition. These studies evaluated the usefulness of computer algorithms with data obtained from drones (primarily VI-UAVs) to quantify defects and extract accurate information that will promote bridge management decisions. This is particularly important as environmental disturbances such as unbalanced lighting, noises issuing from the drone hardware, and drone shakiness results in hazy and low-quality images. One such study developed a custom software named DEEP (DEfect detection by Enhanced image Processing) which utilizes red-green-blue (RGB) color code based image processing to assess the damage expansion [71]. When compared with CAD-based computing, close correlation between the results was observed. However, it was noted that the CAD-based technique was slightly more accurate whereas the RGB method was faster. Akbar et al. used speeded up robust features (SURF) algorithm to stitch images captured by an aerial platform [72]. The proposed methodology was capable of executing image stitching even when wind gusts or calibration issues resulted in angular displacement of the drone.
Another study compared the usefulness of various edge detection algorithms (performed in spatial and frequency domains) for defect detection in UAV-based image acquisition scenarios [73]. The study indicated that damage identification using LoG filter in the spatial domain demonstrated highest accuracy (92%), detected fine cracks (up to 0.2 mm) and had the quickest processing time (1.18 s per image). The image processing results in the frequency domain was noisier and processing time was longer compared to the spatial domain. Lei et al. developed a technique based on the crack central point to improve the accuracy and denoising ability of traditional edge detection algorithms [74]. The proposed method was capable of extracting crack information quickly and accurately from small datasets. Moreover, this method demonstrated higher adaptability to different datasets. Ellenberg et al. used post-processing algorithms such as homography and lens distortion correction for deformation quantification, change detection, and crack pattern detection [75].
A recent study related to structural performance used fiducial markers and optical flow tracking to automate bridge displacement measurement [76]. The proposed data collection strategy involved acquiring data of portions of the structure at a time which enabled maximizing image resolution, increasing accessibility as well as reducing atmospheric effects and distortion. Reliable results were obtained with error less than 1.6% and modal assurance criteria higher than 0.925. Another recent study investigated deflection detection using Deformation Area Difference (DAD) method, reliant on the synergy between bending moment and curvature [69]. Data obtained from VI-UAV demonstrated higher precision for deflection measurement (0.1186 mm) compared to TLS (0.236 mm) but was observed to be less precise than levelling (0.064 mm) and displacement sensors (0.0329 mm). Results also indicated that noise level and deflection size adversely impacted damage detection capabilities of the proposed technique. Moreover, damage localization was difficult closer to the support structures. Lattanzi et al. conducted 3D image reconstruction using dense structure from motion (DSfM) [77]. DSfM was found to be particularly useful for structures requiring complicated reconstruction. However, the technique demonstrated distortion and low accuracy for areas with low-image texture or planar surfaces. Another study developed a semi-automated framework for 3D bridge modelling based on rule-based classification for the creation of labelled models from photogrammetric point clouds [78]. Voxel structure and global graph optimization distinguished structural components based on geometric characteristics, whereas classification tree identified structural features. The error associated with reconstruction was as low as 0.4%.
Few studies integrated AI or machine learning algorithms for improved data processing capabilities. Kim et al. used deep learning convolutional neural networks for detection and measurement of crack geometry via image classification and localization [79]. The algorithm was sufficiently accurate generating a relative error up to 2%. However, the study noted that shadows and intensity of incident light affected the crack quantification process which could remedied by utilizing lighting equipment or post processing techniques. Another study compared the corrosion sizes obtained from K-means, static, and manual measurements [75]. Although, K-means clustering algorithm was observed to be the least labor intensive, static, and manual measurements reported higher accuracy. K-means was also used to distinguish the objective thresholds of drone-based thermal data [41], and for crack detection using image segmentation [74]. Convolutional neural network (CNN) was also found to be useful for crack detection, capable of performing under varying light, surface finish, and humidity conditions [80]. Another study utilized region-based CNN for damage identification and localization [52].
8. Cost Considerations
Over the course of the last decade, technological enhancements have made UAV systems more accessible, improved functionalities, while simultaneously reduced costs. A wide array of UAV systems at varying price ranges are available in the market to cater to the increasing demand arising from civilian applications. The UAV specialization and performance attributes including UAV design, payload capacity, battery capability, flight duration, data processing facilities, sensor compatibility, etc., influence the costs associated with the aerial systems. The cost of commercial UAVs can range between less than USD 50 to more than USD 50,000 based on the level of specialization, complexity, and integrity of the system [12]. Improved capabilities and sensor integration enabling collision avoidance, attitude, altitude, and position control can result in further cost accumulation. Few studies tallied the costs of UAV-enabled bridge monitoring and reported varying results. One such study compared the expenses associated with Fracture Critical Member inspections using UAV and Under-Bridge Inspection Truck (UBIT) [66]. Although the hourly cost of UBIT inspection was twice that incurred by UAV, the latter required more time for complete bridge inspection compared to the former, which resulted in UAV inspection being 130% more expensive than UBIT (USD 3600 and USD 1564, respectively). On the other hand, 10% lower cost was incurred to inspect bridge elements using a small UAV compared to Under-Bridge Inspection Truck (UBIV) [81]. Wells et al. reported 66% cost savings when utilizing UAV-based inspection compared to traditional methods [57]. The former required USD 20,000 and just 5 days on site, whereas the latter amounted to nearly USD 59,000 and 8 days of inspection on site. Similarly, another study reported 46% faster and 61% more cost-effective inspection due to UAV deployment [82]. This disparity can be attributed to the fact that cost and time-saving benefits of UAVs are applicable only for large-scale bridge inspection projects. Additionally, more studies are required to quantify the cost implications of wide variety of bridge superstructure types, and other factors including site conditions, this comparison may not be representative for all routine bridge inspections.
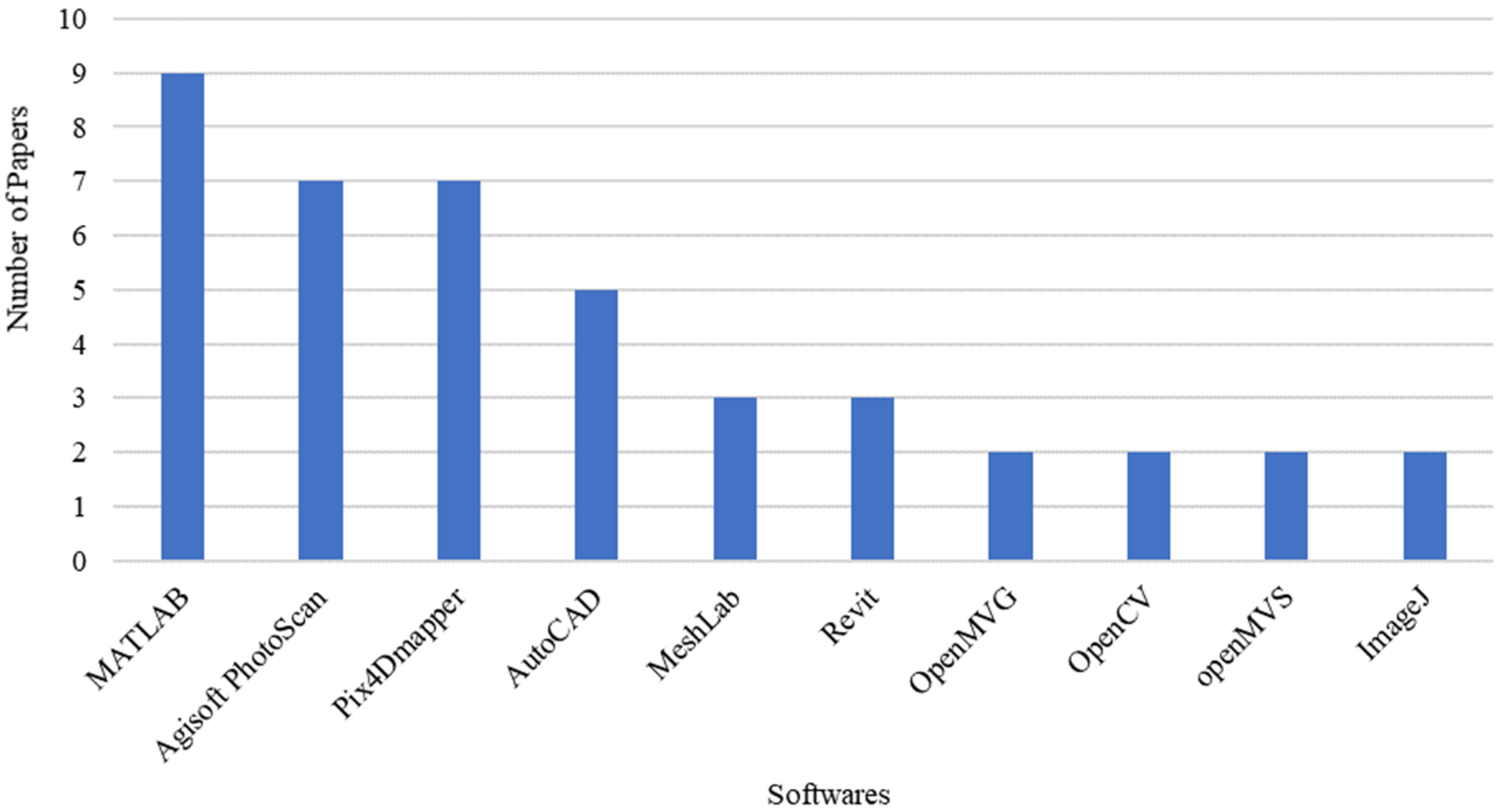
9. Simulation Platforms
Various simulation and data processing platforms are available to process the information acquired from the NDT-UAV systems. Figure 9 illustrates the frequently utilized software for UAV-based bridge condition monitoring. Matlab was observed to be the most widely used software package, particularly employed for its image processing algorithms and capabilities including image stitching and enhancement, edge detection, entropy definition, intensity adjustment, pixel extraction and clustering, computation of coordinates, among others [9,26,53,73,75]. Agisoft Photoscan and Pix4Dmapper were other commonly used software, particularly proficient at 3D modelling and reconstruction. The former, useful to process LiDAR and photogrammetry data, was used for data quality assessment, damage analysis including the quantification of crack length, thickness and defect area, and assessment of translation movement [27,28,35,36,78]. On the other hand, Pix4Dmapper was primarily utilized for 3D model generation based on RGB, thermal, or multispectral images [36,38,41,83]. CAD-based software was often utilized for defect evaluation, 3D modelling, geometric measurement, as well as extraction of design information [9,79]. Meshlab and Revit allowed 3D processing and generated renderings providing geometric information [53,70,77,83]. OpenCV, OpenMVG, and OpenMVS were used for the estimation of photogrammetric camera calibration parameters, sparse point cloud reconstruction and dense point cloud reconstruction, respectively [24,29,38,77]. ImageJ offered data enhancement capabilities including noise reduction and thermal enrichment, as well as provided image analysis algorithms for damage quantification [41,84]. Other efficient photogrammetric software packages useful for bridge 3D modelling include ContextCapture, RealityCapture, and PhotoModeler, capable of representing real-world conditions in the form of 3D reality meshes [18,82].
10. Conclusions and Future Recommendations
Transportation agencies and government stakeholders are in need of technologies that can tackle the challenges posed by traditional methods while simultaneously delivering reliable data. Mitigating risk of accidents during bridge inspection process and accessibility advantages have driven research towards the implementation of UAVs. UAVs have proven improved accessibility and cost efficiency, avoidance of traffic closure, as well as reduced safety hazards during the inspection process. The present review analyzed novel research studies dedicated to the application of UAVs in the realm of bridge condition monitoring, with focus on the possibility of utilizing non-destructive technologies with the UAV data collection process. The study critically analyzed the performance of UAVs equipped with NDTs, including infrared systems, visual imaging devices, LiDAR, and other sensors. Based on the data extracted from sixty-five Scopus-indexed conference and journal articles, it can be deduced that a significant number of studies carried out in this field utilized visual imagery for UAV-based data collection and processing. This can be attributed to robustness of established imaging tools and the popularity of UAV systems with integrated cameras. Although UAVs offer several advantages over traditional inspection techniques, they are also incumbered with inherent limitations and several challenges for researchers to further consider and investigate improvements. These challenges include:
- Lack of standard UAV-based inspection procedures compared to the standard visual inspection procedures documented in bridge inspection manuals.
- UAV path obstructions and unfavourable weather conditions, including gusts of wind and precipitation, can disallow safe and stable operations.
- Equipment constraints such as battery life and payload limitations can affect flight duration and path planning.
- UAV safety or performance may be compromised due to network instability or GPS-denied conditions.
- Line of sight constraints often necessitate the requirement of visual observers or surveillance technology when inspecting remote bridge elements.
Data acquisition, processing and related bridge condition rating using UAV require analysis and validation. The emerging science and technologies related to internet of things and artificial intelligent applications can play vital role in this prospective.
In summary, the conclusions and recommendations of the current study can be summarized as follows:
- The review highlighted a dearth in utilizing specific NDT technologies such as the LiDAR with UAV for data collection.
- Drone assisted thermal imagery is useful for the detection of subsurface anomalies. Standard procedures/guidelines for thermography-UAV based condition monitoring of bridges are still limited in the literature.
- Additional studies required to comprehensively characterize surface and subsurface defects simultaneously which may be achieved by equipping UAVs with multiple sensors such as LiDAR, thermal and optical cameras. Additionally, assimilation of inertial and spatial sensors can generate georeferenced 3D data.
- Rigorous research required to enhance drone performance under varying weather and illumination conditions. It is critical to identify the relation between drone altitude and damage detection accuracy.
- GPS-free stabilization of UAVs and the utilization of advanced onboard visual and obstacle avoidance sensors such as multidirectional vision stability sensors as well as collision-tolerant design need to explored further in the context of bridge monitoring.
- Detailed cost–benefit analysis to clearly quantify and outline the expenses associated with UAV operation.
- More studies are needed to quantify savings associated with time and assess reduction in safety risks related to UAV implementation compared to traditional visual inspection.
- Investigation of potential of incorporation of UAV within inspection guidelines in bridge inspection manuals with specific standard procedures for data collection and analysis.
- Studying the applicability of drone-based inspection for various bridge types, materials, and geometries.
- Future studies need to further explore potential of emerging technologies such as AI and IoT techniques for autonomous data collection and processing. Examining real time data processing and also feasibility assessment of remote inspections using 5G connectivity should be explored.
Author Contributions
Conceptualization, S.A.D. and S.F.; methodology, S.A.D. and S.F.; validation, S.F. and S.A.D.; formal analysis, S.F.; data curation, S.F.; writing—original draft preparation, S.F. and S.A.D.; writing—review and editing, S.A.D.; supervision, S.A.D.; project administration, S.A.D.; funding acquisition, S.A.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Office of Vice Chancellor for Research and Graduate Studies and Research Institute of Sciences and Engineering (RISE) at University of Sharjah through projects number: 19020401133.
Data Availability Statement
All data related to this research is contained with the article and provided Appendix A.
Acknowledgments
The authors would like to acknowledge University of Sharjah for supporting publication of this research study.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Summarized research data extracted from selected studies.
| Reference | Year | Publication Type | Type of Technology | Validation | Test Object | Type of Measurement | Data Acquisition Tools | Software | Algorithm |
|---|---|---|---|---|---|---|---|---|---|
| [66] | 2019 | Journal | VI-UAV | Bridge in Ashton, Idaho | Fatigue cracks | DJI Mavic Pro sUAS/Camera/Hands-on (Under-Bridge Inspection Truck (UBIT)) | - | ||
| [71] | 2020 | Journal | VI-UAV | CAD-aided evaluation | 5 Railway Bridges//Italy | Inspecting Bridge Defects | Aibot X6 (flying hexacopter)//DOMUS Bridge Management System (BMS) (management tool) | DEEP (DEfect detection by Enhanced image Processing) developed by the authors | The condition evaluation algorithm//color-based algorithm |
| [68] | 2007 | Journal | VI-UAV | Visual inspection | Viaduct in France | Inspecting Bridge Defects | Camera//UAV//on-site experiment | - | |
| [72] | 2017 | Journal | VI-UAV | A sample structure was built to be used/ Real-world concrete structure | Defects such as the displacements and cracks | 4K resolution camera//UAV (Phantom Professional-3) | - | Speeded up robust features (SURF)-based feature detection algorithm//random sample consensus algorithm//image processing algorithm//The scale- invariant feature transform algorithm//Image stitching algorithm//random sample consensus (RANSAC) algorithm | |
| [26] | 2018 | Journal | VI-UAV | Static images; Digital display crack width measurement device | Concrete Structures | Cracks | Camera//Laser Rang Finder//UAV//IMETRUM | MATLAB | |
| [34] | 2019 | Journal | VI-UAV | - | - | Two USB cameras (Logicool C920)//UAV | - | ||
| [73] | 2019 | Journal | VI-UAV | Ground truth | Concrete panels (At lab) | Crack detection | Camera//UAV//Digi-Sense data logging light meter with NIST | MATLAB | Edge detection was carried out by six filters in the spatial (Roberts, Prewitt, Sobel, and Laplacian of Gaussian) and frequency (Butterworth and Gaussian) domains/image processing algorithms/Edge detection algorithm/crack detection algorithm |
| [51] | 2016 | Journal | IRT-UAV, VI-UAV | Rolling cart with infrared and color cameras | Bridge Deck | Detection of delamination//Cracks | GoPro Hero 3+ silver edition color camera and a FLIR Tau 2 uncooled core IR camera//UAV//Infrared and color cameras was used to validate the results obtained by the UAV. | Microsoft ICE | FLIR a325sc delamination detection algorithm/The UAV algorithm/The identification algorithm |
| [9] | 2018 | Journal | VI-UAV | Measuring tape | Timber arch bridge | Crack lengths, thicknesses, and rust stain | UAV (Dà-Jiang Innovations (DJI, Shenzhen, Guangdong) Phantom 4) | MATLAB/AutoCAD | sharpness estimation algorithm developed by Birdal (2011) |
| [35] | 2019 | Journal | VI-UAV | Visual inspection | Eight bridge inspections in North Florida | Routine Inspections, Special Inspections, and Damage Inspections. | Camera/UAV | Agisoft PhotoScan | |
| [75] | 2015 | Journal | VI-UAV | Concrete Structures (At lab) | Deformation/Corrosion/Crack | Camera (Sony NEX 7)/GoPro camera/UAV (Da-Jiang Innovations (DJI) Phantom) | MATLAB/Paint | K-means algorithm/post-processing algorithms/calibration algorithm/crack identification algorithm/texture identification algorithms/camera calibration algorithm/crack detection algorithm | |
| [53] | 2019 | Journal | VI-UAV | Bridge in Eugene, Oregon. | Conventional bridge inspection/Crack | Camera/UAS (DJI Mavic Pro)/Evaluation (Interview, Nationwide survey) | Revit/BIM 360 Glue/MATLAB/Notepad++ | image processing algorithm/machine learning algorithm | |
| [58] | 2016 | Journal | VI-UAV | Concrete-type slab bridges and concrete and steel box-girder bridges in Japan | Inspecting Bridge Defects | Rotor-type UAV (quadcopter)/PRSS UAV | VICON TRACKER | ||
| [42] | 2019 | Journal | IRT-UAV | Handheld IR camera | Concrete Specimen | Detection of Delamination | Professional handheld IR camera (H-IRC)/UAV mounted with an IR camera (UAV-IRC) | - | |
| [56] | 2017 | Journal | VI-UAV | Bridge in Japan | Detection of delamination/Cracks | 360-degree spherical camera/UAV with a multi-rotor (multicopter)/large-sized two-wheeled multi-copter | 3D CAD/2D CAD | algorithm of position estimation using RICOH THETA/the registration algorithm | |
| [27] | 2018 | Journal | VI-UAV | Historical inspection reports | Timber girder bridge structure in USA | Cracking, spalling, corrosion, and moisture on the bridge | UAV (Dà-Jiāng Innovations (DJI) Phantom 4) | PhotoScan | |
| [28] | 2020 | Journal | VI-UAV | Based on coordinate values | Model mockup bridge (Scale 1:10) | Dimensions | Digital single lens reflex (DSLR) camera/Hexacopter UAS | Ground Station/Agisoft Photoscan | |
| [25] | 2018 | Journal | VI-UAV | Human inspections | Model mock/Fall River Bridge in Ashton, Idaho | Fatigue Crack Detection | Nikon L830 Camera/GoPro camera/UAS (Mavic, Inspire & Phantom) | - | |
| [10] | 2018 | Journal | VI-UAV | Glulam, three-span timber girder bridge in Keystone, South Dakota | concrete cracks, spalling, and moisture on concrete decking, and salt deposit and moisture on timber girders | UAV (Dà-Jiāng Innovations (DJI) Phantom 4) | - | ||
| [36] | 2019 | Journal | VI-UAV | Railway bridge in Germany | Damage patterns such as cracks | Camera/UAV | Agisoft Photoscan/Pix4Dmapper/Colmap/WebODM | MVS algorithm/tailored point cloud analysis algorithms/clustering algorithm/Pseudo-algorithm/SfM algorithm/automated object recognition algorithms | |
| [31] | 2020 | Journal | VI-UAV | Steel bridges in USA | Rust distributed/local observation/Macro-observation | Camera/UAV | - | The segmentation/Edge detector algorithm, such as Prewitt, Sobel or Canny Edge Detector/lens contour extraction algorithm | |
| [24] | 2019 | Journal | VI-UAV | Vernier caliper, crack ruler, hand-held DSLR | Bridge Deck | cracks | Camera/UAV | openMVS/C++ | |
| [70] | 2020 | Journal | TLS-UAV | Bridge in Alberta, Canada | Bridge surface defects such as cracks | LiDAR-equipped UAV (MIT RANGE/Bigone 8 Hsepro LiDAR) | Unity 3D/ CSiBridge /Revit 2017 | Genetic Algorithm (GA) and A* algorithm, path length matrix calculation | |
| [30] | 2017 | Journal | VI-UAV | Reinforced concrete bridges (Boğaçayı Bridge in Antalya, Turkey) | Bridge modelling | Camera/UAV | SAP2000 | Three-Dimensional Finite Element model | |
| [74] | 2018 | Journal | VI-UAV | concrete cracks inspection experiment | cracks | Quadrotor UAV | - | Edge detection algorithms such as Canny algorithm, Prewitt algorithm, and Sobel algorithm/Robert algorithm/The LoG algorithm/K-means clustering algorithm | |
| [45] | 2019 | Journal | Sensor-UAV | linear variable differential transducers (LVDTs) | Railroad bridges | Transverse bridge displacement measurement | Vibrometer sensor/OFV-534 LDV by Polytec/UAS | - | Algorithms based on trigonometric principles to compensate for the motion of the vibrometer |
| [83] | 2019 | Journal | VI-UAV | Bridge over the Basento river in Potenza, Italy | 3D modelling | Camera/commercial UAV DJI Mavic Pro/photographic sensors/laser scanner | Photoscan/Pix4d/MeshLab/Rhinoceros v6/Mesh2Surface | Structure from Motion (SFM)/SIFT/Poisson disk/Poisson surface reconstruction | |
| [46] | 2018 | Journal | Sensor-UAV | Manual tap testing | Railroad bridge structural | Structural integrity of concrete. | TASCAMDR-44 WL digital recorder/Four external microphones/UAV (DJI Phantom multirotor) | - | The machine learning algorithm/variety of structural integrity algorithm |
| [41] | 2017 | Journal | IRT-UAV, VI-UAV | Hammer sounding; HCP testing | Concrete bridge decks | Cracks | IRT camera (FLIR Vue Pro)/UAV/IPad Mini 4 device | Matlab/FLIR/ImageJ/Pix4D mapper/Excel | Stitching algorithm/k-means clustering algorithm/image segmentation algorithm |
| [47] | 2018 | Journal | Sensor-UAV | Floor slab of a bridge | Bridge surface defects such as cracks | 8 Rotor UAV/3 DoF manipulator/Camera | Architecture (Developed by the authors) | ||
| [32] | 2018 | Journal | VI-UAV | Pinned-connected steel truss bridge | Displacement Measurement | 6 DOF camera motion/UAS (DJI Phantom 3 Professional) | - | Template-matching algorithms/optical flow-based tracking algorithm | |
| [38] | 2019 | Journal | VI-UAV | TLS | Boyne Viaduct Bridge in Drogheda, Ireland | 3D Reconstructions/Damage Evaluation | 12-megapixel digital camera/UAV (DJI Phantom 4)/Laser scanner | VisualSFM/OpenMVG/PhotoScan/Pix4D/PhotoScan | The iterative closest point (ICP) algorithm/Autoclustering algorithm, such as k- means or DBSCAN. |
| [37] | 2017 | Journal | VI-UAV | TLS | Placer River Bridge in North America | 3D Reconstructions | Camera (Sony NEX-7)/UAV (DJI S800 airframe) | GCS software /Agisoft Photoscan/ | Hierarchical Dense Structure-from-Motion algorithm/Fast Approximate Nearest Neighbours (FANN) algorithm/the eight-point algorithm/global pixel-wise image-matching algorithm/Semi-global Matching (SGM)/Perspective-n-Point (PnP) algorithm |
| [33] | 2014 | Journal | VI-UAV | X-box Kinect, TRITOP | Pedestrian bridge | Bridge surface defects such as cracks and deformation | Camera/UAV (Parrot AR 2.0)/Apple iPod touch | Matlab | A computational algorithm/Kinect MATLAB algorithm/ Unmanned aerial vehicle MATLAB algorithm/image processing algorithm |
| [29] | 2018 | Journal | VI-UAV | Bridge in Switzerland. | 3D Reconstructions | 12.4-megapixel Zenmuse X3 camera/UAV (DJI Inspire 1) | OpenCV/OpenFOAM /openMVG/openMVS/Blender/swiftSnap/ParaView | Patch-Match algorithm/Structure from Motion (SfM) photogrammetric algorithms/implemented surface reconstruction algorithm | |
| [57] | 2017 | Journal | VI-UAV | Four bridges | General bridge inspections | Camera/SenseFly albris UAS/Rope access inspection | - | ||
| [76] | 2019 | Journal | VI-UAV | Little Golden Gate Bridge in Mahomet, USA | Displacement data | Camera/UAV | - | Natural excitation technique for the eigen-system realization algorithm (NeXT ERA)/Levenberg–Marquardt Algorithm/marker detection algorithm | |
| [50] | 2017 | Journal | IRT-UAV, VI-UAV, TLS-UAV | Segmental box-girder bridge | Digital 3D reconstruction | UAS/LiDAR sensor | WebGIS/PostGIS/PostgreSQL | Structure-from-motion algorithms/automated crack-detection algorithms | |
| [79] | 2018 | Journal | VI-UAV | Old concrete bridge | Crack Identification | Camera/UAV (Inspire 2 with Zenmuse X5S) | Pix4D Mapper/AutoCAD 2017 | Deep learning algorithm/vector machine (SVM) algorithm/image pyramid algorithm the region of interest (ROI) algorithm/the Sobel edge detection/The CNN training algorithm using Cifar-10 data/crack quantification algorithm | |
| [44] | 2020 | Journal | VI-UAV, TLS-UAV | Navas bridge at Algodonales, Cadiz, Spain | General bridge inspection | UAV (DJI 2312E rotors) | Architecture Diagram Software | ||
| [69] | 2020 | Journal | VI-UAV | Laser scanner, terrestrial photogrammetry, total station, levelling, displacement sensors | Bridge in Altrier, Luxembourg | Damage localisation | Drone DJI Matrice 600/camera Fujifilm GFX50S /laser scanner (Leica P20)/total station (Leica TS30 and Leica TS60)/levelling (Leica DNA 03)/displacement sensors (Two displacement sensors from HBM)/Photogrammetry (full-frame camera Nikon D800) | Elcovision 10/Sofistik | |
| [67] | 2018 | Journal | VI-UAV | TLS, total station-theodolites | Bridge of the Saracens in Adrano, Italy (Ancient arched brick) | Reconstruction of 3D surfaces | Camera (GoPro Hero 4)/UAV Hexacopter with Lipo 4S cells | Pix4Mapper/Pix4Dmapper version 3/MeshLab/Flying software (Arducopter 3.1.5) | ICP algorithm/Structure-From-Motion (SfM) algorithms/Area Based Matching (ABM) |
| [39] | 2019 | Journal | VI-UAV | TLS | Bridge of the Han River, Korea | 3D modeling | Terrestrial LiDAR/UAV/Camera | Trimble Real Works (TRW)/UAS Master | |
| [85] | 2018 | Journal | VI-UAV | The Ponte delle Torri masonry bridge in Spoleto, Italy. | 3D modeling (Geometry)/Crack pattern | Multicopter SenseFly Exom drone equipped with ultrasonic and circular vision sensors | ARTeMIS Modal Pro/PhotoScan/Abaqus | Crystal Clear SSI algorithm | |
| [77] | 2015 | Journal | VI-UAV | Tape measurements | Pedestrian bridge/Artificial structures (Lab) | 3D reconstruction | Camera/UAS/LADAR | MeshLab/123D Catch/OpenCV/Arc3D/clustering views for multi view stereo (CMVS)/OpenGL graphics API/SURF | The IM reconstruction algorithm |
| [43] | 2019 | Journal | VI-UAV, Sensor-UAV | Two bridges with different features | General bridge inspection | Camera/UAS/total station/manual contact | - | ||
| [52] | 2020 | Journal | VI-UAV, Sensor-UAV | Visual inspection | Laboratory-scale concrete shear wall/Bridge structure | Damage localization | Camera (Sony A9)/UAS/1D LiDAR | - | The mask R-CNN algorithm |
| [49] | 2017 | Journal | IRT-UAV, VI-UAV | Hammer sounding | Two bridge deck surfaces in Detroit, Michigan | Concrete delaminations | Thermal infrared imaging camera (FLIR)/Nikon D800, digital single-lens reflex (DSLR) camera/UAV (Bergen hexacopter) | Matlab | The classification algorithm/the mapping algorithm/sophisticated analysis algorithms, |
| [78] | 2019 | Journal | VI-UAV | Two bridges in China | 3D Reconstruction of Structural Surface | Camera/UAV | EOS PhotoModeler Scanner/Agisoft PhotoScan | SfM algorithm/Poisson surface reconstruction/the Min-cut algorithm/voxel-based segmentation algorithms/Region Growing (RG) algorithm/Locally Convex Connected Patches (LCCP) algorithm | |
| [86] | 2019 | Conference | VI-UAV, TLS-UAV | San Cono’s bridge (masonry bridge) in Bianco river, Italy | 3D Reconstruction | Camera/UAV | Pictran-D digital photogrammetric/Agisoft Photoscan/Mission Planner/Rhinoceros/GTS NX structural software | ||
| [87] | 2016 | Conference | VI-UAV | Artificial structures (Lab) | Performance and damages for civil structures | Camera/UAV Bebop Drone | Matlab | Speeded up Robust Features (SURF) Based Feature Detection Algorithm/The stitching algorithm/Autonomous crack identification algorithm/Image registration algorithm/RANdom Sample Consensus (RANSAC) | |
| [80] | 2018 | Conference | VI-UAV | Different concrete surfaces | Detect cracks on concrete surfaces | Camera/UAV | - | Crack detection modelrelies on a deep learning convolutional neural network (CNN) image classification algorithm/machine learning-based algorithm for crack detection | |
| [88] | 2018 | Conference | IRT-UAV, VI-UAV | Existing bridge and pavement in USA | Damage classification and condition assessment. | UAV carrying high resolution camera and infrared thermography camera/Raspberry Pi camera/DJI Phantom 4 Pro Drone | - | Robust algorithm | |
| [89] | 2019 | Conference | VI-UAV | Bridge on the Danube River in Novi Sad | Data collectionto record the progress during the construction | Camera/UAV (DJI Phantom 4 Advanced Pro,) | - | ||
| [90] | 2020 | Conference | VI-UAV | Simulated bridge | General bridge inspection | - | Unity game engine | Augmented reality (AR) (Virtual reality environment) | |
| [91] | 2019 | Conference | VI-UAV | Artificial structures (Lab) | measure 2D and 3D shape and deformation fields in structures | Arduino along with a LIDAR/Computer (Microsoft Surface 3)/Quadrotor UAV (DJI Matrice 100 UAV with Stereo-DIC system)/Camera /OptiTrack motion capture system | VIC-3D | ||
| [92] | 2019 | Conference | VI-UAV | Clifton Suspension Bridge | General bridge inspection | UAV (Hexacopter)/Lightware LW20C lightweight LIDAR | QGIS/eCalc/CAD | ||
| [84] | 2020 | Conference | VI-UAV | Indoor Girder Inspection (lab)/Four-span timber slab bridge located in Pipestone, Minnesota | Identify and quantify damage | UAV (DJI Matrice 210)/Gimbal camera | ImageJ/Python 5.0.1 | Conventional image analysis algorithm/DIC algorithm | |
| [93] | 2019 | Conference | VI-UAV, TLS-UAV | Bridge in Benevento, Italy/Concrete bridge | Damage assessment/Real dimensions of structural elements. | Drones/Camera/LIDAR | Pix4D | ||
| [94] | 2016 | Conference | VI-UAV | Railway infrastructure system | structural faults/security threat detection/consequences of natural hazards/intentional attacks | Drones/Camera /sensors | - | Motion tracking algorithm/Robust algorithm | |
| [95] | 2019 | Conference | VI-UAV | Bridge in USA | Crack Detection/3D object reconstruction | UAS (DJI S900 hexacopter with a payload of 6.8 Kg)/ZED Stereo Camera | - | ||
| [96] | 2016 | Conference | VI-UAV | Bridge crossing the Duck pond, Korea | General bridge inspection | USV/GPS/IMU/laser distance finder (Hokuyo UST-10LX) | - |
References
- Abu Dabous, S.; Alkass, S. Managing bridge infrastructure under budget constraints: A decision support methodology. Can. J. Civ. Eng. 2011, 38, 1227–1237. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. Status of the Nation’s Highways, Bridges, and Transit: Conditions and Performance; U.S. Department of Transportation: Washington, DC, USA, 2015.
- Cook, W.; Barr, P.J.; Halling, M.W. Bridge Failure Rate. J. Perform. Constr. Facil. 2015, 29, 04014080. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Feroz, S. Condition monitoring of bridges with non-contact testing technologies. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. NDT Documentation and Evaluation of the Roman Bridge of Lugo Using GPR and Mobile and Static LiDAR. J. Perform. Constr. Facil. 2015, 29, 06014004. [Google Scholar] [CrossRef]
- Oh, J.-K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.-J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Struct. Health Monit. 2018, 17, 1056–1072. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Kivi, S.S.; Abdolvand, M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Duque, L.; Seo, J.; Wacker, J. Bridge Deterioration Quantification Protocol Using UAV. J. Bridge Eng. 2018, 23, 04018080. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J.P. Field Application of UAS-Based Bridge Inspection. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 72–81. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in Civil Infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Sony, S.; LaVenture, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M. Bridge inspection: Human performance, unmanned aerial systems and automation. J. Civ. Struct. Health Monit. 2018, 8, 443–476. [Google Scholar] [CrossRef] [Green Version]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Jeong, E.; Seo, J.; Wacker, J. Literature Review and Technical Survey on Bridge Inspection Using Unmanned Aerial Vehicles. J. Perform. Constr. Facil. 2020, 34, 04020113. [Google Scholar] [CrossRef]
- Chan, B.; Guan, H.; Jo, J.; Blumenstein, M. Towards UAV-based bridge inspection systems: A review and an application perspective. Struct. Monit. Maint. 2015, 2, 283–300. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Agnisarman, S.; Lopes, S.; Madathil, K.C.; Piratla, K.; Gramopadhye, A. A survey of automation-enabled human-in-the-loop systems for infrastructure visual inspection. Autom. Constr. 2019, 97, 52–76. [Google Scholar] [CrossRef]
- Ahmed, H.; La, H.M.; Gucunski, N. Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms. Sensors 2020, 20, 3954. [Google Scholar] [CrossRef]
- Yaacoub, J.-P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Hill, A.C.; Laugier, E.J.; Casana, J. Archaeological Remote Sensing Using Multi-Temporal, Drone-Acquired Thermal and Near Infrared (NIR) Imagery: A Case Study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Nie, X.; Fan, J.; Liu, X. Image-based crack assessment of bridge piers using unmanned aerial vehicles and three-dimensional scene reconstruction. Comput. Civ. Infrastruct. Eng. 2019, 35, 511–529. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Fatigue Crack Detection Using Unmanned Aerial Systems in Fracture Critical Inspection of Steel Bridges. J. Bridge Eng. 2018, 23, 04018078. [Google Scholar] [CrossRef]
- Zhong, X.; Peng, X.; Yan, S.; Shen, M.; Zhai, Y. Assessment of the feasibility of detecting concrete cracks in images acquired by unmanned aerial vehicles. Autom. Constr. 2018, 89, 49–57. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Jalinoos, F.; Amjadian, M.; Agrawal, A.K.; Brooks, C.; Banach, D. Experimental Evaluation of Unmanned Aerial System for Measuring Bridge Movement. J. Bridge Eng. 2020, 25, 04019132. [Google Scholar] [CrossRef]
- Hackl, J.; Adey, B.T.; Woźniak, M.; Schümperlin, O. Use of Unmanned Aerial Vehicle Photogrammetry to Obtain Topographical Information to Improve Bridge Risk Assessment. J. Infrastruct. Syst. 2018, 24, 04017041. [Google Scholar] [CrossRef]
- Özcan, O. Multi-Hazard Assessment of RC Bridges using Unmanned Aerial Vehicle-Based Measurements. Balt. J. Road Bridge Eng. 2018, 13, 192–208. [Google Scholar] [CrossRef] [Green Version]
- Marchewka, A.; Ziółkowski, P.; Aguilar-Vidal, V. Framework for Structural Health Monitoring of Steel Bridges by Computer Vision. Sensors 2020, 20, 700. [Google Scholar] [CrossRef] [Green Version]
- Yoon, H.; Shin, J.; Spencer, B.F. Structural Displacement Measurement Using an Unmanned Aerial System. Comput. Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Ellenberg, A.; Branco, L.; Krick, A.; Bartoli, I.; Kontsos, A. Use of Unmanned Aerial Vehicle for Quantitative Infrastructure Evaluation. J. Infrastruct. Syst. 2015, 21, 04014054. [Google Scholar] [CrossRef]
- Hidaka, K.; Fujimoto, D.; Sato, K. Autonomous Adaptive Flight Control of a UAV for Practical Bridge Inspection Using Multiple-Camera Image Coupling Method. J. Robot. Mechatron. 2019, 31, 845–854. [Google Scholar] [CrossRef]
- Tomiczek, A.P.; Whitley, T.J.; Bridge, J.A.; Ifju, P.G. Bridge Inspections with Small Unmanned Aircraft Systems: Case Studies. J. Bridge Eng. 2019, 24, 05019003. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N.; Kersten, J.; Taraben, J.; Debus, P.; Helmrich, M.; Rodehorst, V. Framework for automated UAS-based structural condition assessment of bridges. Autom. Constr. 2019, 97, 77–95. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D.; Cunningham, K.; Dell’Andrea, R.; Riley, M. Unmanned aerial vehicle inspection of the Placer River Trail Bridge through image-based 3D modelling. Struct. Infrastruct. Eng. 2018, 14, 124–136. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.F.; Mangina, E.; Zolanvari, S.M.I.; Byrne, J. UAV Bridge Inspection through Evaluated 3D Reconstructions. J. Bridge Eng. 2019, 24, 05019001. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.W.; Park, J.K. Modeling and Management of Bridge Structures Using Unmanned Aerial Vehicle in Korea. Sens. Mater. 2019, 31, 3765. [Google Scholar] [CrossRef]
- Lu, Y.; Golrokh, A.J.; Islam, A. Concrete Pavement Service Condition Assessment Using Infrared Thermography. Adv. Mater. Sci. Eng. 2017, 2017, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Omar, T.; Nehdi, M.L. Remote sensing of concrete bridge decks using unmanned aerial vehicle infrared thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Mac, V.H.; Tran, Q.H.; Huh, J.; Doan, N.S.; Kang, C.; Han, D. Detection of Delamination with Various Width-to-depth Ratios in Concrete Bridge Deck Using Passive IRT: Limits and Applicability. Materials 2019, 12, 3996. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Cuevas, P.J.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic System for Inspection by Contact of Bridge Beams Using UAVs. Sensors 2019, 19, 305. [Google Scholar] [CrossRef] [Green Version]
- Jimenez-Cano, A.E.; Sanchez-Cuevas, P.J.; Grau, P.; Ollero, A.; Heredia, G. Contact-Based Bridge Inspection Multirotors: Design, Modeling, and Control Considering the Ceiling Effect. IEEE Robot. Autom. Lett. 2019, 4, 3561–3568. [Google Scholar] [CrossRef]
- Garg, P.; Moreu, F.; Ozdagli, A.; Taha, M.R.; Mascareñas, D. Noncontact Dynamic Displacement Measurement of Structures Using a Moving Laser Doppler Vibrometer. J. Bridge Eng. 2019, 24, 04019089. [Google Scholar] [CrossRef]
- Moreu, F.; Ayorinde, E.; Mason, J.; Farrar, C.; Mascarenas, D. Remote railroad bridge structural tap testing using aerial robots. Int. J. Intell. Robot. Appl. 2018, 2, 67–80. [Google Scholar] [CrossRef]
- Ikeda, T.; Yasui, S.; Minamiyama, S.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Stable impact and contact force control by UAV for inspection of floor slab of bridge. Adv. Robot. 2018, 32, 1061–1076. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Yaghi, S.; Alkass, S.; Moselhi, O. Concrete bridge deck condition assessment using IR Thermography and Ground Penetrating Radar technologies. Autom. Constr. 2017, 81, 340–354. [Google Scholar] [CrossRef]
- Escobar-Wolf, R.; Oommen, T.; Brooks, C.N.; Dobson, R.J.; Ahlborn, T.M. Unmanned Aerial Vehicle (UAV)-Based Assessment of Concrete Bridge Deck Delamination Using Thermal and Visible Camera Sensors: A Preliminary Analysis. Res. Nondestruct. Eval. 2017, 29, 183–198. [Google Scholar] [CrossRef]
- Eschmann, C.; Wundsam, T. Web-Based Georeferenced 3D Inspection and Monitoring of Bridges with Unmanned Aircraft Systems. J. Surv. Eng. 2017, 143, 04017003. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge deck delamination identification from unmanned aerial vehicle infrared imagery. Autom. Constr. 2016, 72, 155–165. [Google Scholar] [CrossRef]
- Yoon, S.; Gwon, G.-H.; Lee, J.-H.; Jung, H.-J. Three-dimensional image coordinate-based missing region of interest area detection and damage localization for bridge visual inspection using unmanned aerial vehicles. Struct. Health Monit. 2020, 1, 14. [Google Scholar] [CrossRef]
- Xu, Y.; Turkan, Y. BrIM and UAS for bridge inspections and management. Eng. Constr. Archit. Manag. 2019, 27, 785–807. [Google Scholar] [CrossRef]
- FAA. Remote Pilot—Small Unmanned Aircraft Systems Study Guide; Federal Aviation Administration (FAA): Washington, DC, USA, 2016.
- Cardosi, K.; Lennertz, T. Human Factors Considerations for the Integration of Unmanned Aerial Vehicles in the National Airspace System: An Analysis of Reports Submitted to the Aviation Safety Reporting System (ASRS); U.S. Department of Transportation, Federal Aviation Administration Emerging Technologies: Washington, DC, USA, 2017.
- Hada, Y.; Nakao, M.; Yamada, M.; Kobayashi, H.; Sawasaki, N.; Yokoji, K.; Kanai, S.; Tanaka, F.; Date, H.; Pathak, S.; et al. Development of a Bridge Inspection Support System Using Two-Wheeled Multicopter and 3D Modeling Technology. J. Disaster Res. 2017, 12, 593–606. [Google Scholar] [CrossRef]
- Wells, J.L.; Lovelace, B.; Kalar, T. Use of Unmanned Aircraft Systems for Bridge Inspections. Transp. Res. Rec. J. Transp. Res. Board 2017, 2612, 60–66. [Google Scholar] [CrossRef]
- Salaan, C.J.O.; Okada, Y.; Mizutani, S.; Ishii, T.; Koura, K.; Ohno, K.; Tadokoro, S. Close visual bridge inspection using a UAV with a passive rotating spherical shell. J. Field Robot. 2018, 35, 850–867. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Unmanned Aircraft Systems (UAS). Available online: https://www.icao.int/safety/UA/Pages/Unmanned-Aircraft-Systems-Advisory-Group-(UAS-AG).aspx#:~:text=The%20Unmanned%20Aircraft%20Systems%20Advisory,as%20well%20as%20the%20Member (accessed on 15 December 2020).
- International Civil Aviation Organization. Unmanned Aircraft Systems Advisory Group. Available online: https://www.icao.int/safety/UA/Pages/Unmanned-Aircraft-Systems-Advisory-Group-(UAS-AG).aspx (accessed on 15 December 2020).
- Civil Aviation Safety Authority. Unmanned Aircraft and Rockets. Available online: https://en.wikipedia.org/wiki/Regulation_of_unmanned_aerial_vehicles#cite_note-kaur-6 (accessed on 15 December 2020).
- National Civil Aviation Agency. Brazilian Special Civil Aviation Regulation. Available online: https://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-94 (accessed on 21 December 2020).
- MLIT. Japan’s Safety Rules on Unmanned Aircraft (UA)/Drones. Available online: https://www.mlit.go.jp/en/koku/uas.html (accessed on 25 December 2020).
- Irish Aviation Authority. Operation of Remotely Piloted Aircraft Systems in Irish Airspace. Available online: https://www.iaa.ie/news/2015/11/13/remote-piloted-aircraft-systems-use-grows-in-ireland (accessed on 15 December 2020).
- Directorate General of Civil Aviation. DGCA RPAS Guidance Manual; Directorate General of Civil Aviation: New Delhi, India, 2019.
- Dorafshan, S.; Thomas, R.J.; Coopmans, C.; Maguire, M. A Practitioner’s Guide to Small Unmanned Aerial Systems for Bridge Inspection. Infrastructures 2019, 4, 72. [Google Scholar] [CrossRef] [Green Version]
- Calì, M.; Ambu, R. Advanced 3D Photogrammetric Surface Reconstruction of Extensive Objects by UAV Camera Image Acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef] [Green Version]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Erdenebat, D.; Waldmann, D. Application of the DAD method for damage localisation on an existing bridge structure using close-range UAV photogrammetry. Eng. Struct. 2020, 218, 110727. [Google Scholar] [CrossRef]
- Bolourian, N.; Hammad, A. LiDAR-equipped UAV path planning considering potential locations of defects for bridge inspection. Autom. Constr. 2020, 117, 103250. [Google Scholar] [CrossRef]
- Potenza, F.; Rinaldi, C.; Ottaviano, E.; Gattulli, V. A robotics and computer-aided procedure for defect evaluation in bridge inspection. J. Civ. Struct. Health Monit. 2020, 10, 471–484. [Google Scholar] [CrossRef]
- Akbar, M.A.; Qidwai, U.; Jahanshahi, M.R. An evaluation of image-based structural health monitoring using integrated unmanned aerial vehicle platform. Struct. Control Health Monit. 2019, 26, e2276. [Google Scholar] [CrossRef] [Green Version]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Benchmarking Image Processing Algorithms for Unmanned Aerial System-Assisted Crack Detection in Concrete Structures. Infrastructures 2019, 4, 19. [Google Scholar] [CrossRef] [Green Version]
- Lei, B.; Wang, N.; Xu, P.; Song, G. New Crack Detection Method for Bridge Inspection Using UAV Incorporating Image Processing. J. Aerosp. Eng. 2018, 31, 04018058. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge related damage quantification using unmanned aerial vehicle imagery. Struct. Control Health Monit. 2016, 23, 1168–1179. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.-W.; Yoon, H.; Spenser, B.F., Jr. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Lattanzi, D.; Miller, G.R. 3D Scene Reconstruction for Robotic Bridge Inspection. J. Infrastruct. Syst. 2015, 21, 04014041. [Google Scholar] [CrossRef]
- Pan, Y.; Dong, Y.; Wang, D.; Chen, A.; Ye, Z. Three-Dimensional Reconstruction of Structural Surface Model of Heritage Bridges Using UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1204. [Google Scholar] [CrossRef] [Green Version]
- Kim, I.-H.; Jeon, H.; Baek, S.-C.; Hong, W.-H.; Jung, H.-J. Application of Crack Identification Techniques for an Aging Concrete Bridge Inspection Using an Unmanned Aerial Vehicle. Sensors 2018, 18, 1881. [Google Scholar] [CrossRef] [Green Version]
- De Silva, W.R.L.; De Lucena, D.S. Concrete Cracks Detection Based on Deep Learning Image Classification. Proceedings 2018, 2, 489. [Google Scholar] [CrossRef] [Green Version]
- Bridge, J.A.; Ifju, P.G.; Whitley, T.J.; Tomiczek, A.P. Use of Small Unmanned Aerial Vehicles for Structural Inspection; Florida Department of Transportation: Tallahassee, FL, USA, 2018.
- Rashidi, M.; Samali, B. Health Monitoring of Bridges Using RPAs; Wang, C.M., Dao, V., Kitipornchai, S., Eds.; EASEC16, Lecture Notes in Civil Engineering; Springer: Singapore, 2021; Volume 101. [Google Scholar]
- Marmo, F.; DeMartino, C.; Candela, G.; Sulpizio, C.; Briseghella, B.; Spagnuolo, R.; Xiao, Y.; Vanzi, I.; Rosati, L. On the form of the Musmeci’s bridge over the Basento river. Eng. Struct. 2019, 191, 658–673. [Google Scholar] [CrossRef]
- Jeong, E.; Seo, J.; Wacker, J. New Bridge Inspection Approach with Joint UAV and DIC System. In Structures Congress 2020; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2020; pp. 349–359. [Google Scholar]
- Roselli, I.; Malena, M.; Mongelli, M.; Cavalagli, N.; Gioffrè, M.; De Canio, G.; De Felice, G. Health assessment and ambient vibration testing of the “Ponte delle Torri” of Spoleto during the 2016–2017 Central Italy seismic sequence. J. Civ. Struct. Health Monit. 2018, 8, 199–216. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D.; Crocetto, N.; Garofalo, A.R. 3D modeling of roman bridge by the Integration of terrestrial and UAV photogrammetric survey for structural analysis purpose. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 249–255. [Google Scholar] [CrossRef] [Green Version]
- Aliakbar, M.; Qidwai, U.; Jahanshahi, M.R.; Masri, S.; Shen, W.-M. Progressive image stitching algorithm for vision based automated inspection. In Proceedings of the 2016 International Conference on Machine Learning and Cybernetics (ICMLC), Jeju, Korea, 10–13 July 2016; Volume 1, pp. 337–343. [Google Scholar]
- Wu, W.; Qurishee, M.A.; Owino, J.; Fomunung, I.; Onyango, M.; Atolagbe, B. Coupling Deep Learning and UAV for Infrastructure Condition Assessment Automation. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; pp. 1–7. [Google Scholar]
- Obradovic, R.; Vasiljevic, I.; Kovacevic, D.; Marinkovic, Z.; Farkas, R. Drone Aided Inspection during Bridge Construction. In Proceedings of the 2019 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 29–30 May 2019; pp. 1–4. [Google Scholar]
- Van Dam, J.; Krasner, A.; Gabbard, J.L. Drone-based Augmented Reality Platform for Bridge Inspection: Effect of AR Cue Design on Visual Search Tasks. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA, USA, 22–26 March 2020; pp. 201–204. [Google Scholar]
- Kalaitzakis, M.; Kattil, S.R.; Vitzilaios, N.; Rizos, D.; Sutton, M. Dynamic Structural Health Monitoring using a DIC-enabled drone. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 321–327. [Google Scholar]
- Goudarzi, H.; Hine, D.; Richards, A. Mission Automation for Drone Inspection in Congested Environments. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 305–314. [Google Scholar]
- Ciampa, E.; De Vito, L.; Pecce, M.R. Practical issues on the use of drones for construction inspections. J. Phys. Conf. Ser. 2019, 1249, 012016. [Google Scholar] [CrossRef] [Green Version]
- Flammini, F.; Pragliola, C.; Smarra, G. Railway infrastructure monitoring by drones. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar]
- Benkhoui, Y.; El Korchi, T.; Reinhold, L. UAS-Based Crack Detection Using Stereo Cameras: A Comparative Study. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1031–1035. [Google Scholar]
- Kim, K.; Hyun, J.; Choi, D.; Myung, H. Vertical thrusting unmanned surface vehicle for stable and close inspection of bridge structure. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1040–1042. [Google Scholar] [CrossRef]
Figure 1.
Structure of the article depicting the main elements of the study.

Figure 2.
Yearly distribution of NDT-UAV technologies used for bridge condition assessment.

Figure 3.
Region-based distribution and publisher count of compiled NDT-UAV studies.

Figure 4.
Flow diagram outlining the review protocol.

Figure 5.
NDT-UAV applications in bridge condition monitoring.

Figure 6.
VI-UAV equipment and a sample of acquired data.

Figure 7.
Typical IR-UAV equipment and sample thermography data.

Figure 8.
Contact based data acquisition using sensor-embedded UAV [43].
Figure 8.
Contact based data acquisition using sensor-embedded UAV [43].

Figure 9.
Types of simulation platforms and corresponding number of studies.

Table 1.
Previous review work related to the application of UAVs in bridge condition monitoring.
| Ref. | Year | Scope of Study | No. of Studies Reviewed | Period of Study |
|---|---|---|---|---|
| [18] | 2015 | UAV-based visual bridge inspection | 33 | 1991–2014 |
| [19] | 2017 | Classification, manufacturing, design, and application of UAVs | 408 | 1952–2017 |
| [13] | 2018 | Structural health monitoring using smartphones, UAVs, cameras, and robotic sensors | 141 | 2007–2018 |
| [14] | 2018 | Civilian and civil engineering applications of UAVs | 169 | 1991–2018 |
| [15] | 2018 | UAV based thermal imaging practices and its application in building inspection | 92 | 2003–2017 |
| [16] | 2018 | Construction applications | 54 | 2008–2018 |
| [20] | 2019 | Automated visual inspection technologies such as drones following the PRISMA guidelines | 53 | 2000–2018 |
| [12] | 2019 | Civil infrastructure application | 135 | N/A |
| [17] | 2020 | Image processing algorithms for UAV-based bridge inspection and damage quantification techniques | N/A | N/A |
| [21] | 2020 | Autonomous robotic platforms for non-destructive testing and bridge monitoring | 242 | 2007–2020 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Feroz, S.; Abu Dabous, S. UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sens. 2021, 13, 1809. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13091809
AMA Style
Feroz S, Abu Dabous S. UAV-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sensing. 2021; 13(9):1809. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13091809
Chicago/Turabian StyleFeroz, Sainab, and Saleh Abu Dabous. 2021. "UAV-Based Remote Sensing Applications for Bridge Condition Assessment" Remote Sensing 13, no. 9: 1809. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13091809
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.