Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes



Abstract
:1. Introduction
2. Materials
2.1. Study Area
2.2. Field Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Min | Max | Mean | Standard deviation |
|---|---|---|---|---|
| Mean tree height (m) | 10.0 | 29.5 | 18.2 | 3.9 |
| Mean DBH (cm) | 10.6 | 26.2 | 17.6 | 3.5 |
| Volume (m3/ha) | 59.4 | 507.6 | 235.7 | 88.3 |
2.3. Airborne Laser Data
3. Methodology
3.1. Area-Based Method
3.2. Individual Tree-Based Method
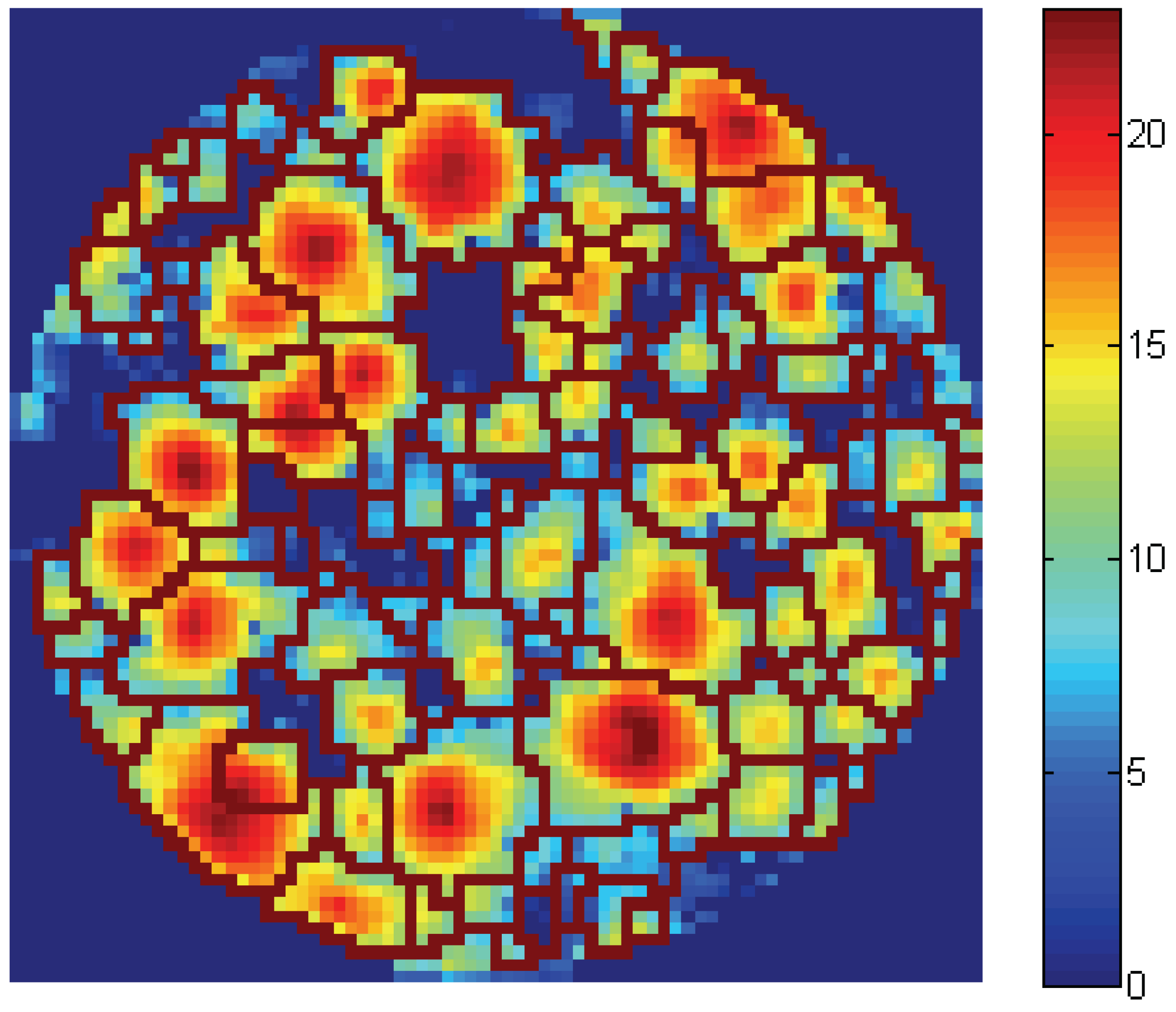
3.2.1. Individual Tree Delineation
- A raster canopy height model (CHM) was created from normalized canopy height data for each plot by taking the maximum values within 0.5 × 0.5-m cells.
- The CHM was smoothed with a Gaussian filter to remove small variations on the crown surface. The degree of smoothness was determined by the value of the standard deviation (Gaussian scale) and kernel size (5 × 5 pixels) of the filter.
- Minimum curvature, one of the principal curvatures, was calculated from the smoothed CHM. For a surface such as that of the CHM, a higher value of minimum curvature describes the treetop.
- The smoothed CHM image was then scaled based on the computed minimum curvature resulting in a smoothed, yet contrast-stretched image.
- Local maxima were then searched in a given neighborhood (3 × 3 windows). They were considered as treetops and used as seeds in the following marker-controlled watershed transformation for tree crown delineations.

3.3. Random Forests
| Plot features | Individual tree features |
|---|---|
| Maximum height | Maximum height |
| Mean height | Mean height |
| Standard deviation | Standard deviation |
| Coefficient of variation | Height range |
| Penetration | Crown area |
| Height percentiles (0% to 90%) | Crown volume |
| Canopy cover percentiles (10% to 90%) | Maximum crown diameter |
| Height percentiles (0% to 90%) | |
| Canopy cover percentiles (10% to 90%) |
3.4. Accuracy Assessment
4. Results
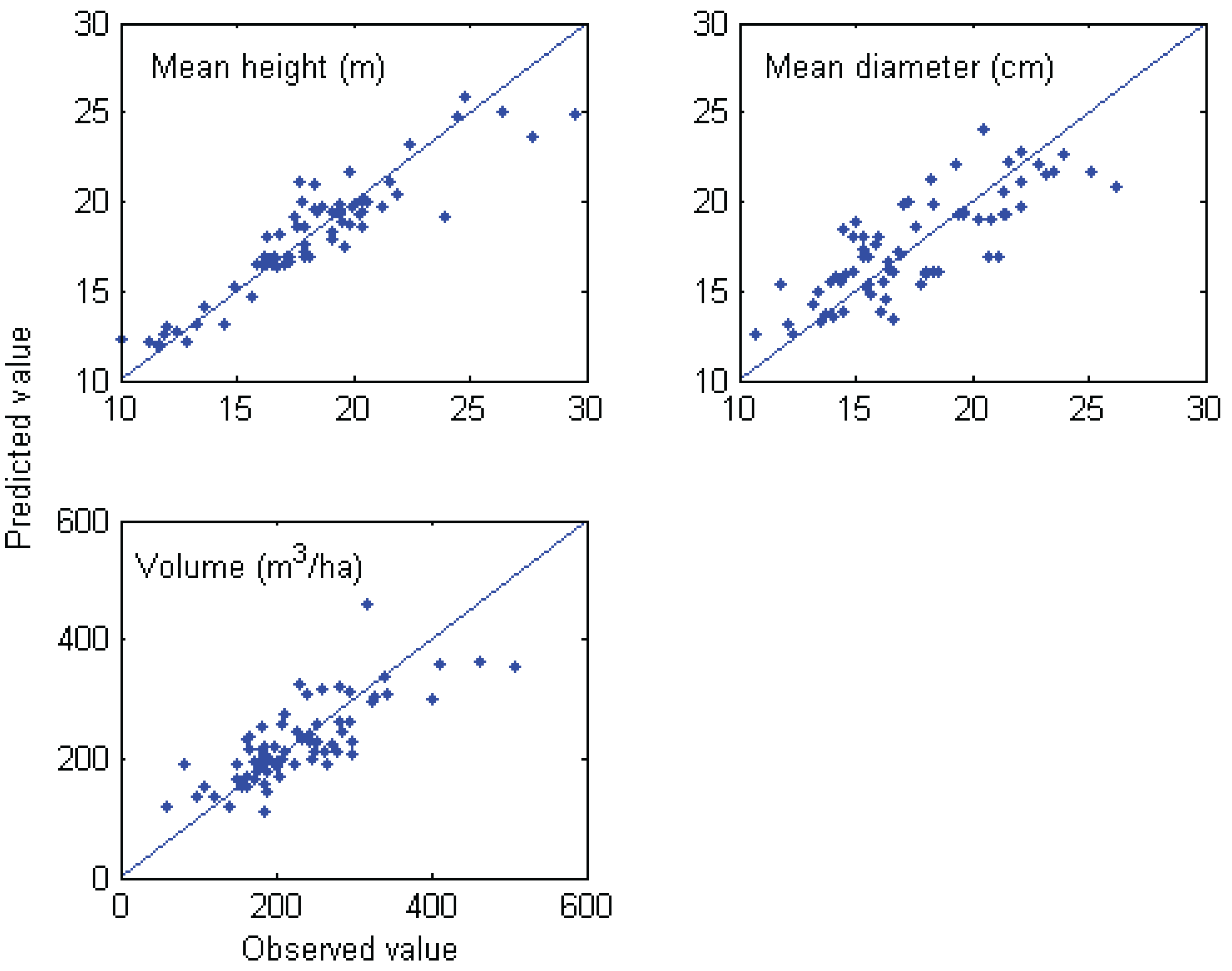
4.1. Area-Based Prediction

4.2. Individual Tree-Based Prediction
- C1.
- Matched field trees against matched laser trees,
- C2.
- All field trees against matched laser trees (those matched with field trees),
- C3.
- All field trees against all laser-detected trees,
- C4.
- Linear regression performed at the plot level with all detected trees against all field trees.
| RMSE (%) | R | |||||||
| Variable | C1 | C2 | C3 | C4 | C1 | C2 | C3 | C4 |
| Mean height | 4.42 | 9.3 | 8.18 | 5.69 | 0.97 | 0.91 | 0.96 | 0.95 |
| Mean diameter | 7.21 | 12.09 | 12.00 | 10.77 | 0.94 | 0.84 | 0.84 | 0.84 |
| Mean volume | 15.35 | 33.61 | 56.52 | 18.55 | 0.95 | 0.76 | 0.85 | 0.85 |

4.3. Comparison of Both Methods

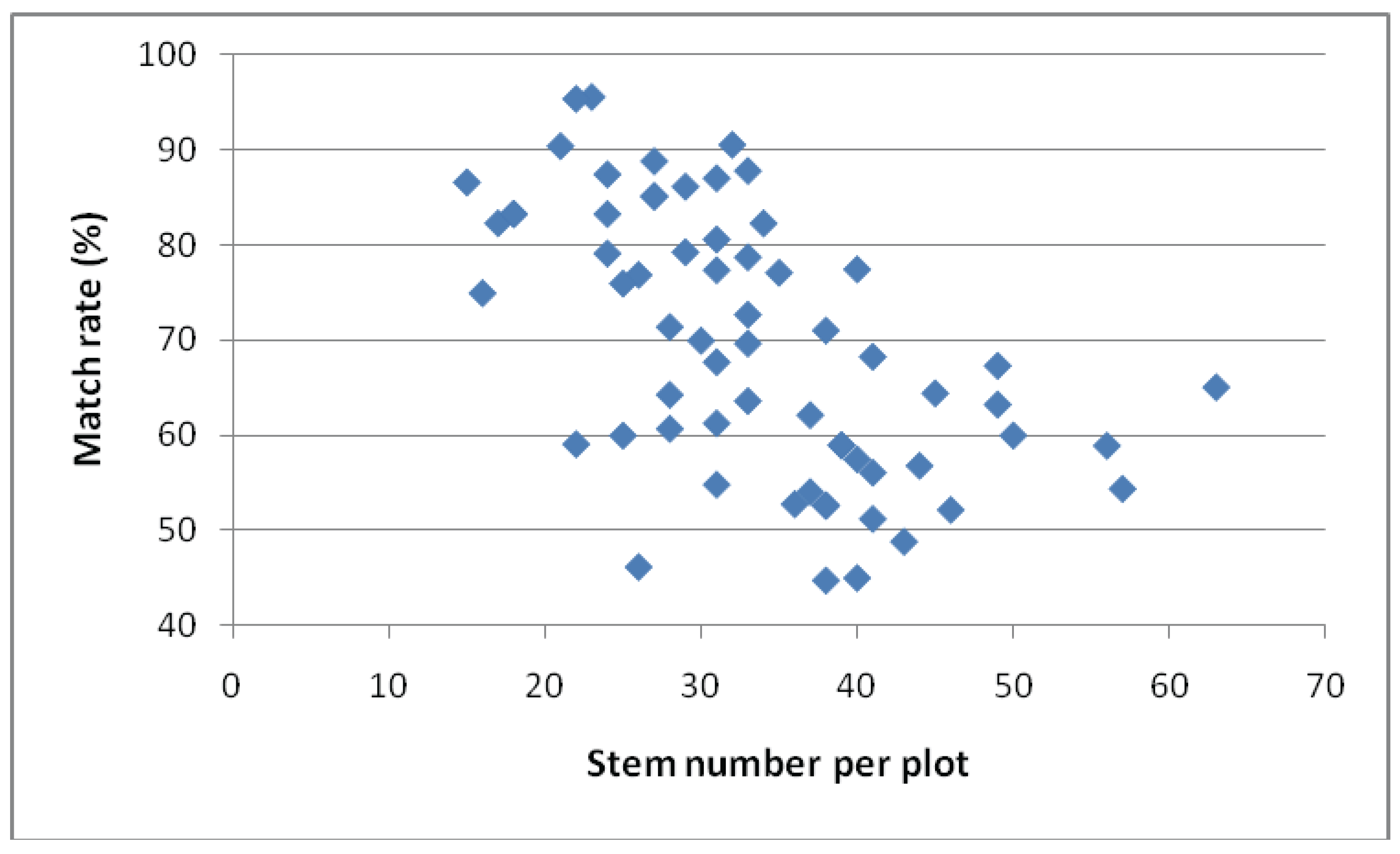
4.4. Effect of Individual Tree Detection

5. Discussion and Conclusions
Acknowledgements
References
- Baltsavias, E.P. Airborne Laser Scanning: Basic Relations and Formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne Laser Scanning—An Introduction and Overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Hyyppä, H.; Hyyppä, J. Comparing the Accuracy of Laser Scanner with Other Optical Remote Sensing Data Sources for Stand Attribute Retrieval. The Photogramm. J. Fin. 1999, 16, 5–15. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of Methods of Small-Footprint Airborne Laser Scanning For Extracting Forest Inventory Data In Boreal Forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Holmgren, J. Prediction of Tree Height, Basal Area and Stem Volume in Forest Stands Using Airborne Laser Scanning. Scand. J. For. Res. 2004, 19, 543–553. [Google Scholar] [CrossRef]
- Magnussen, S.; Boudewyn, P. Derivations of Stand Heights from Airborne Laser Scanner Data with Canopy-Based Quantile Estimators. Can. J. For. Res. 1998, 28, 1016–1031. [Google Scholar] [CrossRef]
- Næsset, E. Forest Stand Characteristics with Airborne Scanning Laser Using a Practical Two-Stage Procedure and Field Data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H.H. Surface Lidar Remote Sensing of Basal Area and Biomass in Deciduous Forests of Eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting Forest Stand Characteristics with Airborne Scanning Lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1371. [Google Scholar]
- Næsset, E. Estimating Timber Volume of Forest Stands Using Airborne Laser Scanner Data. Remote Sens. Environ. 1997, 61, 246–253. [Google Scholar] [CrossRef]
- Holmgren, J.; Nilsson, M.; Olsson, H. Estimation of Tree Height and Stem Volume on Plots Using Airborne Laser Scanning. For. Sci. 2003, 49, 419–428. [Google Scholar]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LIDAR Remote Sensing of Forest Structure. Prog. Phys. Geog. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Maclean, G.A.; Krabill, W.B. Gross-merchantable Timber Volume Estimation Using an Airborne LIDAR System. Canad. J. Remote Sens. 1986, 12, 7–18. [Google Scholar] [CrossRef]
- Hollaus, M.; Wagner, W.; Schadauer, K.; Maier, B.; Gabler, K. Growing Stock Estimation for Alpine Forests in Austria: A Robust Lidar-based Approach. Canad. J. For. Res. 2009, 39, 1387–1400. [Google Scholar] [CrossRef]
- Lim, K; Treitz, P. Estimation of Above Ground Forest Biomass from Airborne Discrete Return Laser Scanner Data Using Canopy-Based Quantile Estimators. Scand. J. For. Res. 2004, 19, 558–570. [Google Scholar]
- Næsset, E.; Økland, T. Estimating Tree Height and Tree Crown Properties Using Airborne Scanning Laser in a Boreal Nature Reserve. Remote Sens. Environ. 2002, 79, 105–115. [Google Scholar] [CrossRef]
- Wallerman, J.; Holmgren, J. Estimating Field-Plot Data of Forest Stands Using Airborne Laser Scanning and SPOT HRG Data. Remote Sens. Environ. 2007, 110, 501–508. [Google Scholar] [CrossRef]
- Brandtberg, T.; Warner, T.A.; Landenberger, R.E.; McGraw, J.B. Detection and Analysis of Individual Leaf-Off Tree Crowns in Small Footprint, High Sampling Density Lidar Data from the Eastern Deciduous Forest in North America. Remote Sens. Environ. 2003, 85, 290–303. [Google Scholar] [CrossRef]
- Leckie, D.; Gougeon, F.; Hill, D.; Quinn, R.; Armstrong, L.; Shreenan, R. Combined High-Density Lidar and Multispectral Imagery for Individual Tree Crown Analysis. Canad. J. Remote Sens. 2003, 29, 633–649. [Google Scholar] [CrossRef]
- Persson, Å.; Holmgren, J.; Söderman, U. Detecting and Measuring Individual Trees Using an Airborne Laser Scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Popescu, S.; Wynne, R.; Nelson, R. Measuring Individual Tree Crown Diameter with Lidar and Assessing Its Influence on Estimating Forest Volume and Biomass. Canad. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and Estimating Attributes for Single Trees Using Laser Scanner. The Photogramm. J. Fin. 1999, 16, 27–42. [Google Scholar]
- Kaartinen, H.; Hyyppä, J. EuroSDR/ISPRS Project, Commission II “Tree Extraction”, Final Report; EuroSDR Official Publication No. 53; European Spatial Data Research: Dublin, Ireland, 2008. [Google Scholar]
- Gaveau, D.L.A.; Hill, R.A. Quantifying Canopy Height Underestimation by Laser Pulse Penetration in Small-Footprint Airborne Laser Scanning Data. Canad. J. Remote Sens. 2003, 29, 650–657. [Google Scholar] [CrossRef]
- Rönnholm, P.; Hyyppä, J.; Hyyppä, H.; Haggrén, H.; Yu, X.; Pyysalo, U.; Pöntinen, P.; Kaartinen, H. Calibration of Laser-Derived Tree Height Estimates by Means of Photogrammetric Techniques. Scand. J. For. Res. 2004, 19, 524–528. [Google Scholar] [CrossRef]
- Bortolot, Z.; Wynne, R.H. Estimating Forest Biomass Using Small Footprint Lidar Data: An Individual Tree-Based Approach That Incorporates Training Data. ISPRS J. Photogramm. Remote Sens. 2005, 59, 342–360. [Google Scholar] [CrossRef]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Bobbertin, M.; Allgöwer, B. LIDAR-Based Geometric Reconstruction of Boreal Type Forest Stands at Single Tree Level for Forest and Wildland Fire Management. Remote Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Lee, A.C.; Lucas, R.M. A Lidar-Derived Canopy Density Model for Tree Stem and Crown Mapping in Australian Forests. Remote Sens. Environ. 2007, 111, 493–518. [Google Scholar] [CrossRef]
- Maltamo, M.; Peuhkurinen, J.; Malinen, J.; Vauhkonen, J.; Packalén, P.; Tokola, T. Predicting Tree Attributes and Quality Characteristics of Scots Pine Using Airborne Laser Scanning Data. Silva Fenn. 2009, 43, 507–521. [Google Scholar] [CrossRef]
- Holopainen, M.; Haapanen, R.; Tuominen, S.; Viitala, R. Performance of airborne laser scanning- and aerial photograph-based statistical and textural features in forest variable estimation. In Proceedings of SilviLaser 2008: 8th International Conference on LiDAR Applications in Forest Assessment and Inventory, Edinburgh, UK, September 17–19, 2008; pp. 105–112.
- Laasasenaho, J. Taper Curve and Volume Functions for Pine, Spruce and Birch. Communicationes Instituti Forestalis Fenniae. 1982, 108, 1–74. [Google Scholar]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. In Proceedings of ISPRS XIXth Congress, Amsterdam, The Netherlands, 16–23 July 2000; In International Archives of Photogrammetry and Remote Sensing. Vol. XXXIII(B4), pp. 110–117.
- Breiman, L. Random Forests. Mach. Learning 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Breiman, L.; Cutler, A. Random forests. Available online: http://www.stat.berkeley.edu/users/breiman/RandomForests/cc_home.htm (accessed on November 20, 2008).
- Yu, X.; Hyyppä, J.; Kukko, A.; Maltamo, M.; Kaartinen, H. Change Detection Techniques for Canopy Height Growth Measurements Using Airborne Laser Scanning Data. Photogramm. Eng. Remote Sens. 2006, 72, 1339–1348. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic Detection of Harvested Trees and Determination of Forest Growth Using Airborne Laser Scanning. Remote Sens. Environ. 2004, 90, 451–462. [Google Scholar] [CrossRef]
- Maltamo, M; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of Timber Volume and Stem Density Based on Scanning Laser Altimetry and Expected Tree Size Distribution Functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar]
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yu, X.; Hyyppä, J.; Holopainen, M.; Vastaranta, M. Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sens. 2010, 2, 1481-1495. https://0-doi-org.brum.beds.ac.uk/10.3390/rs2061481
Yu X, Hyyppä J, Holopainen M, Vastaranta M. Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sensing. 2010; 2(6):1481-1495. https://0-doi-org.brum.beds.ac.uk/10.3390/rs2061481
Chicago/Turabian StyleYu, Xiaowei, Juha Hyyppä, Markus Holopainen, and Mikko Vastaranta. 2010. "Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes" Remote Sensing 2, no. 6: 1481-1495. https://0-doi-org.brum.beds.ac.uk/10.3390/rs2061481