1. Introduction
In general two main approaches are distinguished to estimate forest inventory attributes from airborne laser scanner (ALS) data [
1]: (1) Area based methods, also described as canopy height distribution (CHD) approaches; and (2) Individual-tree-detection (ITD) methods. Often the CHD approaches are associated with low-resolution and the ITD methods with high-resolution data.
In Central Europe, the majority of studies have concentrated on CHD approaches to estimate forest inventory attributes such as stand heights, basal area or timber volume per hectare. Usually geo-referenced plots from operational inventories were utilized as reference data. Metrics related to canopy height and densities have been used as predictors in regression models and nonparametric methods (e.g., [
2,
3,
4,
5]).
In addition, a number of single tree delineation algorithms were developed. Possibilities to detect individual tree crowns in deciduous and mixed temperate forests in Germany are described in [
6]. In [
7] a 3D single tree modeling procedure was developed and tested in a mixed forest in southern Germany. A 3D segmentation technique using full-waveform ALS data was presented by [
8]. The procedure was tested in the Bavarian Forest National Park in south-eastern Germany. The potential of full-waveform ALS for tree species classification in a mixed forest in Austria was presented by [
9].
However, there are fewer ALS studies in central European forests that explored the estimation of individual-tree-based information relevant for forest inventories such as tree height, stem diameter and stem volume. Experiments have been carried out in the Bavarian Forest National Park in south-eastern Germany [
10,
11,
12]. A first European-wide attempt to derive single tree information from ALS data was carried out within the HIGH-SCAN project [
13].
The main reason why CHD approaches have been favored is due to the fact that these methods are considered to be more robust than ITD techniques [
14,
15]. Particularly in dense deciduous forests in the temperate climate zones it can be difficult to delineate individual trees with satisfying accuracy [
6]. Another reason why the estimation of single tree attributes has not been studied in detail is that appropriate reference data is often missing. The positions of trees on the ground have to be measured with high precision. Otherwise it is very difficult and often impossible to link crown segments which were delineated based on remote sensing data with trees measured in the field.
The objective of this study was to analyze the potential of high-resolution ALS and multispectral line scanner data for the extraction of individual-tree-based information for pine trees (Pinus sylvestris) in a study site in the south-west of Germany. The main objective was to assess the accuracy of several allometric models for stem volume estimation of automatically delineated trees. The results were analyzed and compared to other studies carried out in Germany and Scandinavia.
2. Test Site and Data
The study area is located in the south-west of Germany, north of the city of Karlsruhe within the federal state of Baden-Württemberg and has a size of 924 ha (Its coordinates in the
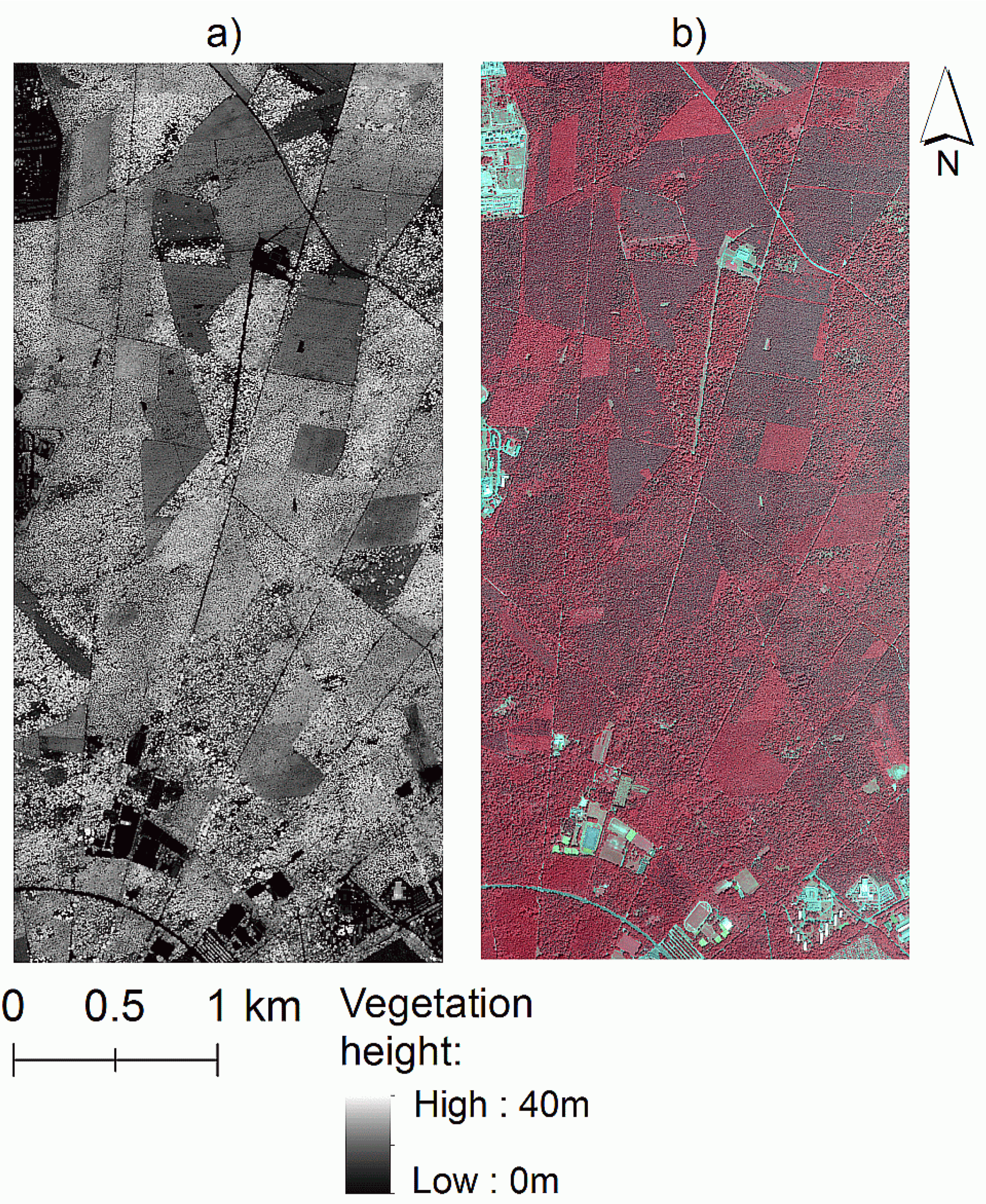
Gauss–Krüger system are: top left: 3,456,300,00/5,436,100,00 and bottom right: 3,458,400,00/5,431,700,00). A vegetation height model from ALS and a color-infrared (CIR) orthophoto of the study area is shown in
Figure 1.
The study site is characterized by flat terrain (min. height: 101 m a.s.l., max. height: 123 m a.s.l.) and various forest stands (pure and mixed forest) with different species and age classes. However, Scots pine (Pinus sylvestris) dominates the study site with 51% (in total 56% coniferous trees).
Figure 1.
(a) Vegetation height model from ALS and (b) Color-infrared orthophoto from multispectral line scanner data of the study area near Karlsruhe, Germany.
Figure 1.
(a) Vegetation height model from ALS and (b) Color-infrared orthophoto from multispectral line scanner data of the study area near Karlsruhe, Germany.
Four spectral channels were acquired during leaf-on conditions in July 2008 by TopoSys GmbH using a multispectral line scanner. One advantage of this sensor is that shadowing effects only occur orthogonal to the flight line [
16]. The single flight strips were rectified and geo-referenced using a surface model, which was filtered from laser scanner data (6–7 points/m
2) and acquired at the same time as the optical data. Important flight and technical parameters of the line scanner are listed in
Table 1.
Table 1.
Flight and technical parameters of the flight campaign in summer 2008 using a multispectral line scanner integrated in the “Falcon II system” (AGL = above ground level).
Table 1.
Flight and technical parameters of the flight campaign in summer 2008 using a multispectral line scanner integrated in the “Falcon II system” (AGL = above ground level).
| Parameter | Value |
|---|
| Flying height | 700 [m] AGL |
| Spectral channels | Blue: 450–490 [nm]
Green: 500–580 [nm]
Red: 580–660 [nm]
Near infrared: 770–890 [nm] |
| Viewing angle | 21.6 [°] |
| Pixels per line | 682 |
| Ground sampling distance | 0.4 [m] |
Full-waveform laser scanner data were measured in November 2009 by Milan Geoservice GmbH using the IGI Litemapper 5600 system with a Riegl LMS-Q560 (240 KHz) scanner.
To obtain a high point density (> 20 rays/m
2), the study area was flown twice, first in north-south and then in east-west direction. Flight and system parameters are shown in
Table 2.
Table 2.
Flight and system parameters of the flight campaign in summer 2009 with the “Harrier 56” LiDAR system (AGL = above ground level).
Table 2.
Flight and system parameters of the flight campaign in summer 2009 with the “Harrier 56” LiDAR system (AGL = above ground level).
| Parameter | Value |
|---|
| Measurement rate | 240 [kHz] |
| Field of view | 60 [°] |
| Flying height | 600 [m] AGL |
| Flying speed | 46 [m/s] |
| Density | 22 [rays/m2] |
| Vertical/horizontal accuracy (excluding GPS errors)* | ~0.1/~0.03 [m] |
The full-waveform data was processed using the software “RiANALYZE 560” and was delivered in ASCII format with 3D coordinates of the reflections and additional information such as target number, number of targets in beam, echo signal amplitude and the echo pulse width.
An “Active Surface Algorithm”, implemented in the software “TreesVis” [
17] was used to compute a terrain and a surface model (DTM and DSM) with 1-m resolution from the reflections. The algorithm employs the general technique of matching a deformable surface to the laser points by means of energy minimization. To estimate a model of the bare earth (DTM), the surface will be fitted to the points that are considered to be terrain points, which are frequently the lowest points within a defined neighborhood [
18]. For the computation of a model including vegetation and buildings, the surface will be fitted to the highest reflections. A normalized DSM (nDSM), in forests often referred to as canopy height model (CHM), was derived as the difference model of DSM and DTM:
Field measurements were carried out in winter 2009 and spring 2010. Nine square field plots with a size of 30 × 30 m were established within forest stands dominated by Scots pine. Some selected stands have a low proportion of further tree species such as red oak (
Quercus rubra), sessile oak (
Quercus petraea), beech (
Fagus sylvatica) and birch (
Betula pendula).
Figure 2 shows a 3D view (DSM with CIR texture) of a typical pine stand in the test site with one of the square field plots.
Figure 2.
3D view (DSM with CIR texture) of a typical pine stand in the study area with one of the square field plots (visualized by the white lines).
Figure 2.
3D view (DSM with CIR texture) of a typical pine stand in the study area with one of the square field plots (visualized by the white lines).
Starting from the center of the plots the positions of 288 pines were determined with the help of a TruePulse 360 laser rangefinder.
Table 3 shows the mean age of the dominant tree layer and the number of trees measured per plot.
Table 3.
Overview of the field plots with the mean age of the dominant tree layer and the number of pines measured in the field.
Table 3.
Overview of the field plots with the mean age of the dominant tree layer and the number of pines measured in the field.
| Plot | Age [years] | Age class* | Number of pines measured in the field |
|---|
| 1 | 28 | II | 78 |
| 2 | 30 | II | 87 |
| 3 | 55 | III | 14 |
| 4 | 55 | III | 21 |
| 5 | 55 | III | 27 |
| 6 | 80 | IV | 14 |
| 7 | 80 | IV | 19 |
| 8 | 85 | V | 20 |
| 9 | 123 | VII | 8 |
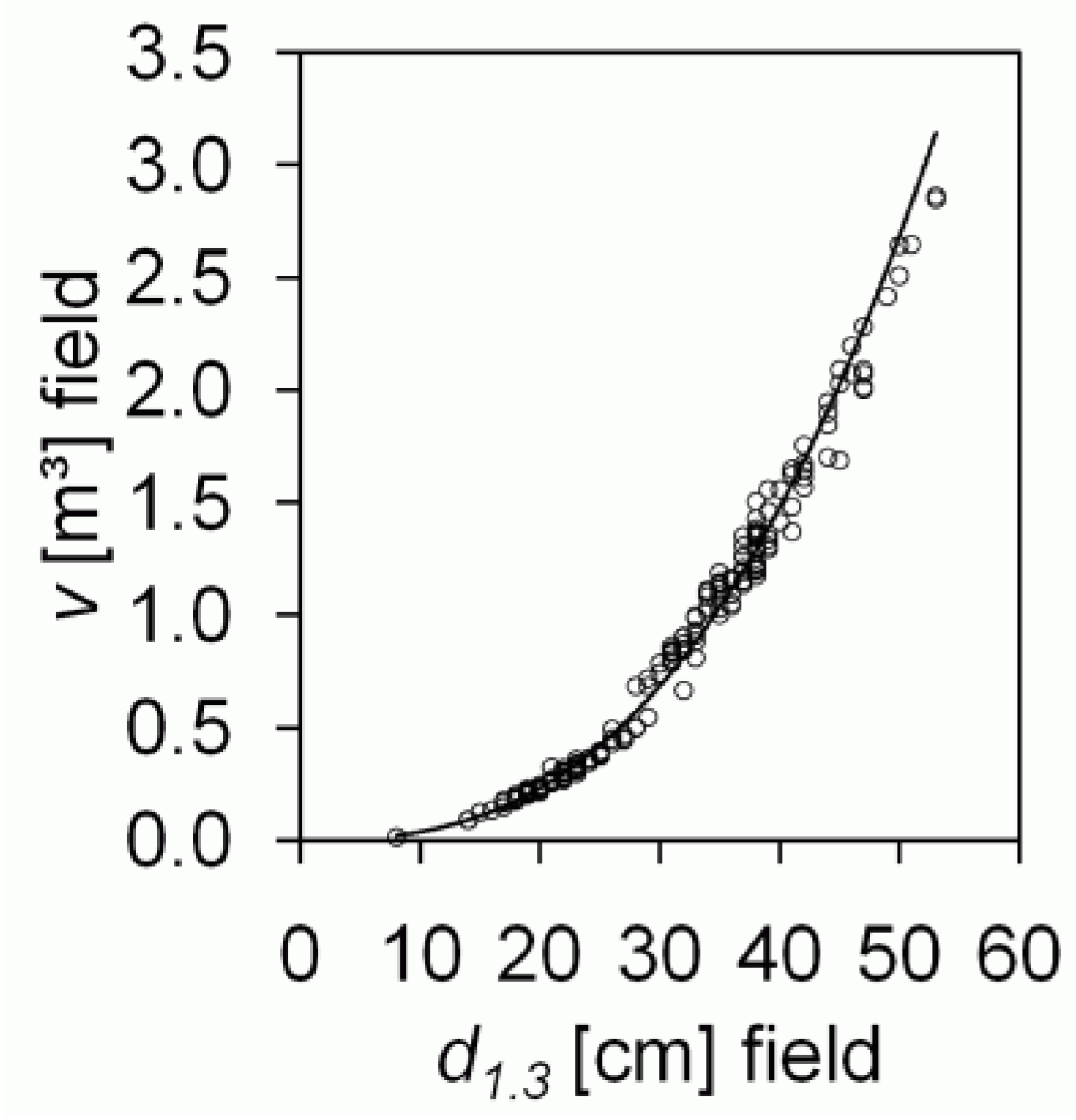
The following features were measured for all trees: (1) height—using a Vertex and (2) diameter at breast height (DBH)—using a caliper. Finally, the stem volume of single trees was computed using the software BDATpro developed by the Forest Research Institute of Baden-Württemberg [
19] with the tree height and DBH as the input variables.
4. Results
Table 8 shows the different regression models for stem volume estimation. The models were derived using all 178 identified pine trees. In addition to unstandardized regression coefficients also standardized coefficients are listed to analyze the relative importance of the predictors. Moreover the
t-statistic is shown to determine if a variable is making a significant contribution to the model for stem volume estimation (if the value for significance is less than 0.05). The goodness-of-fit of the regressions is given in
Table 9 by the coefficient of determination (R
2) in addition to the adjusted R².
Table 8.
Regression models for stem volume estimation.
Table 8.
Regression models for stem volume estimation.
| Model | Regression coefficients | Unstandardized coefficients | Standardized coefficients | t | Significance |
|---|
| 1 | | −4.969 | | −42.141 | 0.000 |
| 3.575 | 0.951 | 40.799 | 0.000 |
| 2 | | −2.027 | | −14.409 | 0.000 |
| 2.686 | 0.709 | 13.327 | 0.000 |
| 3 | | −2.441 | | −13.911 | 0.000 |
| 1.206 | 0.700 | 13.020 | 0.000 |
| 4 | | −4.876 | | −48.487 | 0.000 |
| 3.101 | 0.825 | 33.162 | 0.000 |
| 0.788 | 0.208 | 8.360 | 0.000 |
| 5 | | −5.011 | | −49.641 | 0.000 |
| 3.119 | 0.830 | 33.279 | 0.000 |
| 0.348 | 0.202 | 8.109 | 0.000 |
| 6 | | −2.257 | | −12.247 | 0.000 |
| 1.636 | 0.432 | 2.796 | 0.006 |
| 0.507 | 0.295 | 1.910 | 0.058 |
| 7 | | −4.928 | | −46.315 | 0.000 |
| 3.086 | 0.821 | 32.900 | 0.000 |
| 0.499 | 0.132 | 2.258 | 0.025 |
| 0.144 | 0.084 | 1.443 | 0.151 |
Table 9.
Goodness-of-fit of the regressions.
Table 9.
Goodness-of-fit of the regressions.
| Model | R2 | Adj. R2 |
|---|
| 1 | 0.904 | 0.904 |
| 2 | 0.502 | 0.499 |
| 3 | 0.491 | 0.488 |
| 4 | 0.932 | 0.931 |
| 5 | 0.930 | 0.930 |
| 6 | 0.512 | 0.507 |
| 7 | 0.932 | 0.931 |
Leave-One-Out Cross-Validation (LOOCV) was used to compare the prediction accuracy of the different regression models. Each single observation (here a tree crown segment) from the original sample was selected as “validation data” and the remaining observations (
n–1 out of
n trees) as “training data”. The prediction accuracy was computed as the absolute and relative root mean square error (RMSE) and Bias. The results are given in
Table 10.
Table 10.
Prediction accuracy of the different regression models.
Table 10.
Prediction accuracy of the different regression models.
| Model | RMSECV [m³] | RMSECV [%] | BiasCV [m³] | BiasCV [%] |
|---|
| 1 | 0.2726 | 29.57 | 0.0203 | 2.20 |
| 2 | 0.4834 | 52.44 | 0.1190 | 12.91 |
| 3 | 0.5250 | 56.96 | 0.1191 | 12.92 |
| 4 | 0.2214 | 24.02 | 0.0125 | 1.36 |
| 5 | 0.2299 | 24.95 | 0.0146 | 1.58 |
| 6 | 0.4967 | 53.88 | 0.1173 | 12.72 |
| 7 | 0.2228 | 24.18 | 0.0129 | 1.40 |
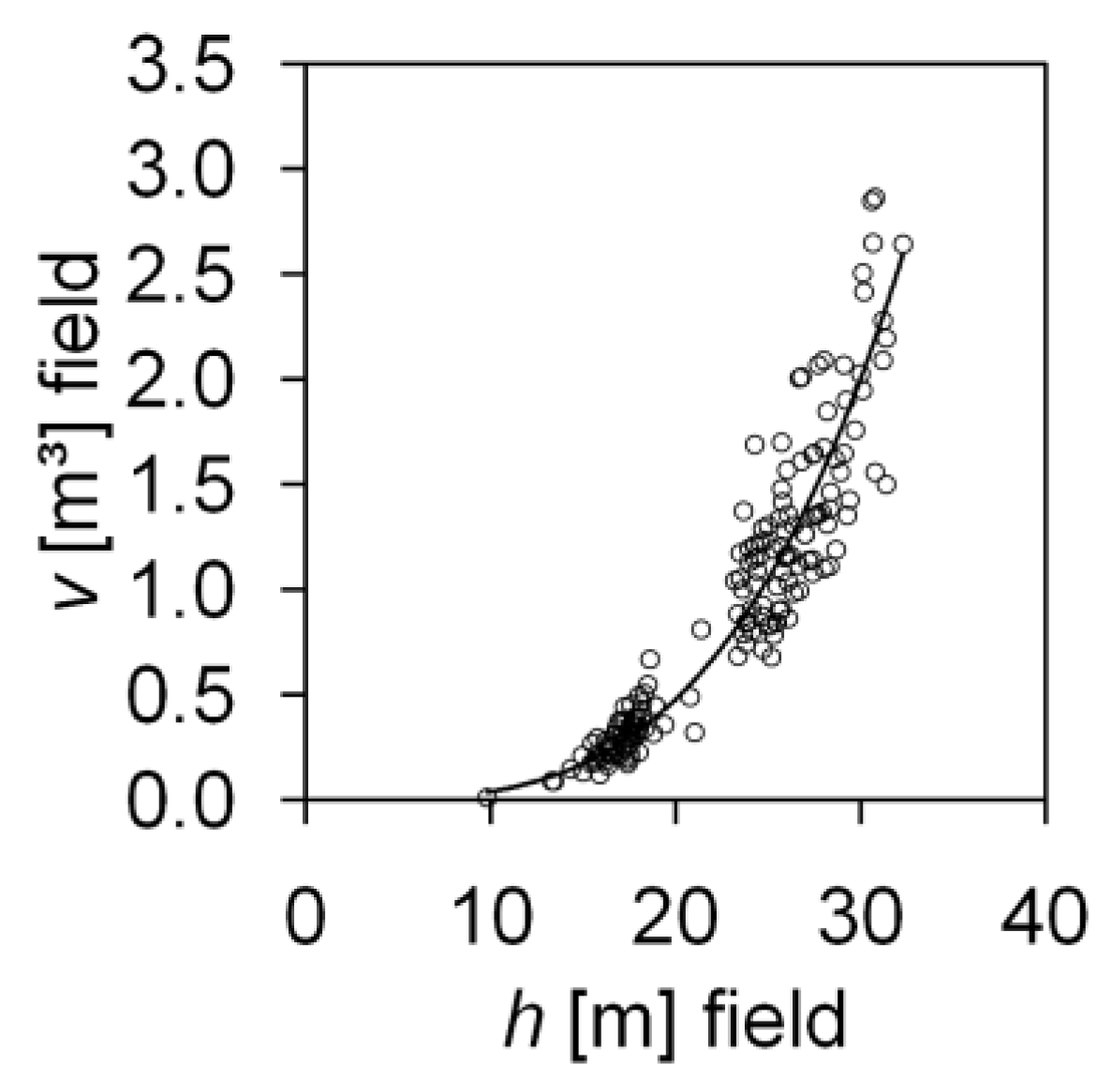
With respect to the RMSE and Bias model 4 with the tree height and crown diameter as the predictors has shown best performance.
5. Discussion and Conclusion
The objective of this study was to explore several allometric models for stem volume estimation of automatically delineated pine trees using ALS and multispectral line scanner data in a study site in the south-west of Germany. Independent variables that are obviously related to the stem volume were used as predictors. An allometric model with tree height and crown diameter (model 4) performed best with a RMSE of 0.2214 m
3 (24.02%) which is much smaller than the standard deviation of the observed variables as shown in
Table 4. The results show clearly that tree height
h is by far the most important predictor. Model 1 with
h as the only predictor explains a high proportion of variability with R
2 = 0.904. The height itself was estimated very precisely from the ALS point cloud with r = 0.957 (RMSE = 1.5 m and Bias = 0.08 m).
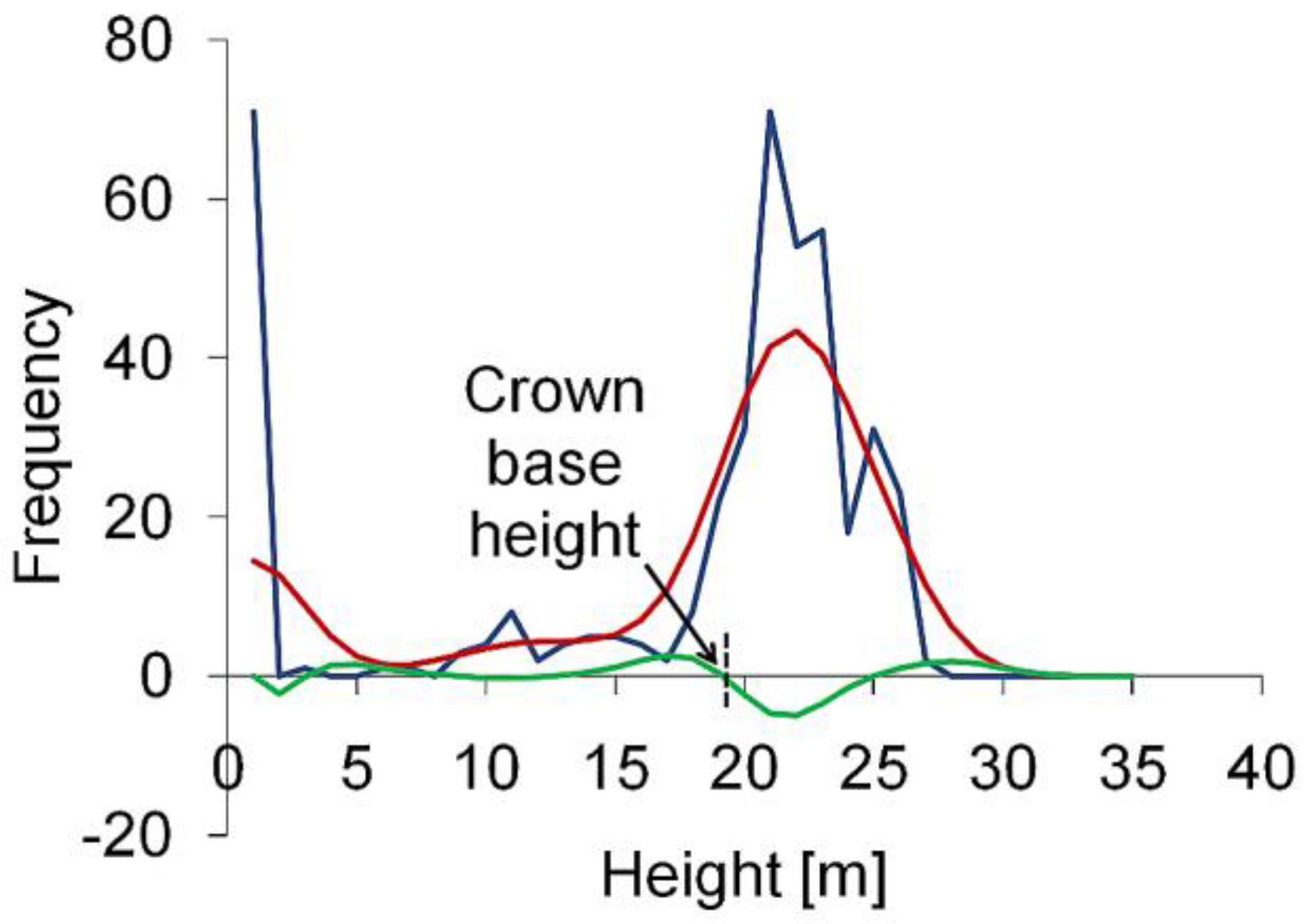
Nevertheless, it was possible to increase the strength of the relationship and to improve the estimation of stem volume with the crown diameter as an additional predictor. Model 5 with tree height and crown volume performed slightly worse which might be due to the fact, that the estimation of the crown base height from the ALS point cloud is not accurate enough. However, a denser point cloud might improve the identification of the crown base which has to be analysed in future studies. Moreover, the usage of all predictors (model 7) did not reduce the RMSE. In addition model 7 (and also 6) show a non-significant coefficient for cv which indicates once more that this variable does not contribute much to the models.
The RMSE of this study is in the range of the errors in most other studies carried out in Germany and Scandinavia. A selection of results is given in
Table 11. However, a direct comparison is not possible due to different study sites with different forest stands and remote sensing data in addition to different validation techniques. A lower RMSE was reported by [
10] for Norway spruce (
Picea abies) and Fir (
Abies alba) (RMSE = 16–17%). However, the prediction accuracy in this study is very close to the result of [
22] who estimated the stem volume of Norway spruce (
Picea abies L. Karst.), Scots pine (
Pinus sylvestris L.) and birch (
Betula spp.) with an RMSE of 22%.
Table 11.
Selection of earlier studies carried out in Germany and Scandinavia to estimate individual tree stem volume from remote sensing features.
Table 11.
Selection of earlier studies carried out in Germany and Scandinavia to estimate individual tree stem volume from remote sensing features.
| Study | Country | Species | RMSE |
|---|
| [33] | Southern Finland | Scots Pine (Pinus sylvestris), Norway spruce (Picea abies), Birch (Betula spp.) | 31% |
| [10] | South-eastern Germany (Bavarian Forest National Park) | Norway spruce (Picea abies), Fir (Abies alba), European beech (Fagus sylvatica), Sycamore maple (Acer pseudoplatanus), Norway maple (acer platanoides), lime tree (Tilia europaea) | 16–17% (coniferous trees)
29–32% (deciduous trees) |
| [11] | South-eastern Germany (Bavarian Forest National Park) | | 27% (coniferous trees)
35% (deciduous trees) |
| [22] | Southern Sweden | Norway spruce (Picea abies L. Karst.), Scots pine (Pinus sylvestris L.) and birch (Betula spp.) | 22% |
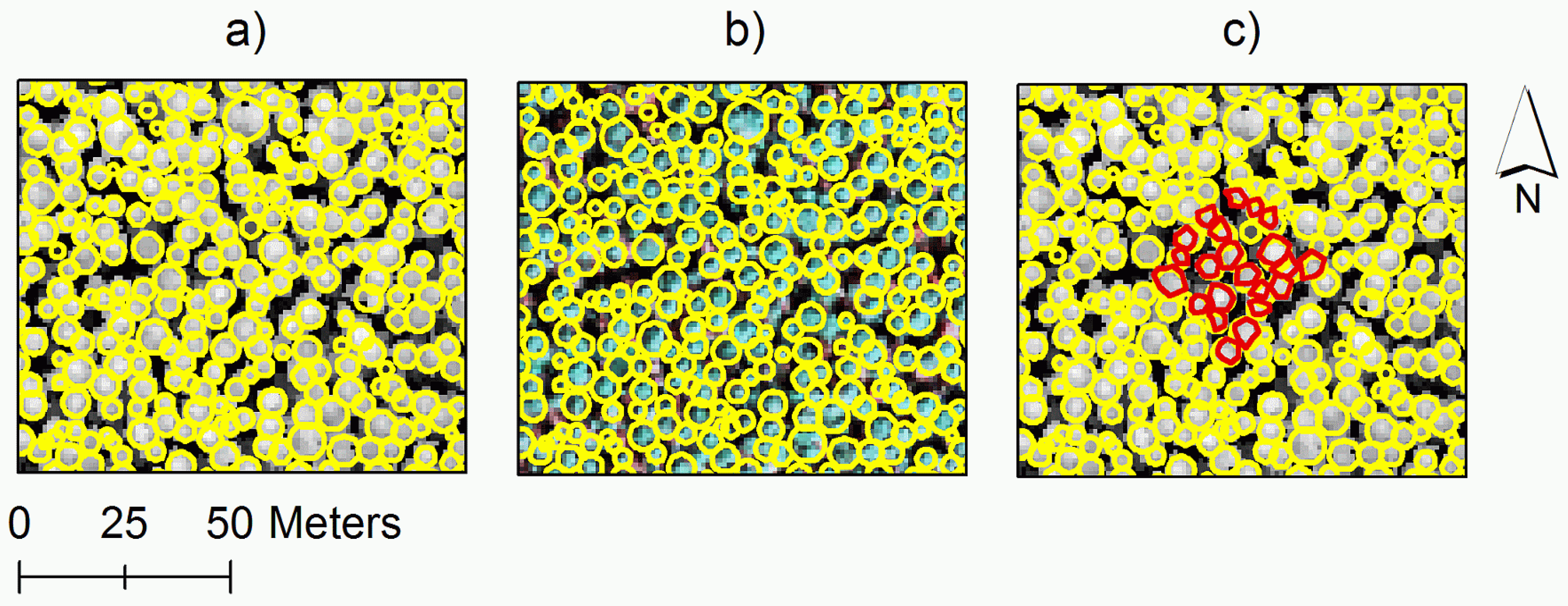
It was possible to delineate pine trees with an overall identification rate of ~62%. Compared to other studies this result is quite satisfying: In [
13], 40−50% coniferous trees (mainly spruces) were delineated correctly in a study site in Austria. In [
11], an identification rate of 38.7−45.4% was reported for both coniferous and deciduous trees in the Bavarian Forest National Park also using DSM based segmentation algorithms. As expected the detection of trees is much worse in young forest stands (age class II with a tree age ≤ 40 years) and very good for plots with an age class ≥ III with 86% correctly segmented trees. A DSM based segmentation technique was used in this study even though it is not possible to identify trees in lower canopy layers. It was assumed that a DSM based segmentation would be more robust compared to a tree extraction based on the ALS point cloud as suggested by others (e.g., [
7]). Nevertheless in future studies the results should be compared to other delineation techniques.
In conclusion, it was possible to develop allometric models which can be used for stem volume estimation of pine trees based on features derived from airborne laser scanner and multispectral line scanner data. The automatic delineation of tree crowns was very successful in forest stands with an age class ≥ III. More research is definitely needed for dense deciduous forests in the temperate climate zones where the automatic segmentation of trees is frequently not accurate enough for the estimation of individual-tree-based information. Theoretically, a more sophisticated classification of different species might improve the discrimination of trees. Furthermore, models for the estimation of other quantitative tree attributes e.g., DBH and basal area have to be developed.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





