Since the methods in this paper are backups to on-board diffuser-based relative gain characterization, comparing the performance of secondary methods with the primary one is paramount. Because the foremost goal of relative gain calibration is to eradicate detector-to-detector non-uniformity (streaking), a streaking metric will be used as a primary means for comparison. In a uniform L1R data product, a detector is compared to its immediate neighbors using the equation:
where
is the mean digital count of the
i-th detector over every frame. For edge detectors in each FPM, only the immediate neighbor is considered. For reference, note that a streaking metric around 0.25% is roughly where streaks become visibly apparent in homogeneous unaltered imagery. Note that although the streaking metric helps explain high-frequency differences between diffuser and side-slither gains, lower frequency differences could be present and, thus, avoid explanation with this metric.
4.1. Side-Slither
At the time this paper was written, there were 19 total side-slither collects available to analyze. Thirteen of these were suitable for OLI relative gain characterization. Out of these, 11 complete sets of relative gains were derived for analysis.
Table 2 provides a breakdown of the side-slither collects used in this paper. Intervals were collected over Egypt (EGY), Libya (LBY), Niger (NER), Greenland (GRL) and Antarctica (ATA).
Table 2.
List of side-slither collects analyzed with WRS-2 path/row coverage.
Table 2.
List of side-slither collects analyzed with WRS-2 path/row coverage.
| Date of Collect | Location | Path | Rows |
|---|
| 3-26-2013 | Niger | 189 | 45–48 |
| 4-5-2013 | Libya/Niger | 187 | 38–49 |
| 4-20-2013 | Egypt | 177 | 36–47 |
| 4-24-2013 | Greenland | 4 | 3–22 |
| 5-6-2013 | Egypt | 177 | 33–47 |
| 5-12-2013 | Greenland | 2 | 4–25 |
| 7-13-2013 | Greenland | 4 | 5–21 |
| 11-30-2013 | Antarctica | 88 | 103–117 |
| 12-16-2013 | Antarctica | 88 | 103–117 |
| 1-1-2014 | Antarctica | 88 | 103–117 |
| 4-11-2014 | Niger | 189 | 44–51 |
To accurately characterize streaking and to compare to diffuser-based relative gain correction, the relative gains were applied to spatially-uniform imagery and compared. The bands that exhibit the most detector non-uniformity are the coastal/aerosol and the SWIRs, so analysis hereafter will primarily focus on these bands.
Because there is no single optimal site for every spectral band in OLI, two different sites were utilized—Greenland, at WRS-2 Path/Row 11/7 for the VNIR/PAN bands, and Niger, at WRS-2 Path/Row 188/46 for the SWIR bands. Because the former is so uniform, streaking artifacts in the visible bands are apparent without any linear stretching. Finding suitable images to test the SWIR bands is more of a challenge, since high-radiance scenes in these bands are over regions that are not as spatially uniform, but some exist within the Sahara Desert. To get an initial sense of how side-slither relative gains visually perform compared to diffuser-based gains, a Greenland scene from 16 June 2013, was processed using the most current diffuser-based gains for the quarter this scene was acquired and gains from three side-slither collects near this scene acquisition date. In addition to evaluating side-slither relative gains, this visual comparison could suggest that operational relative gain parameters might need more frequent updating. Currently, the diffuser gains for each quarter are calculated by averaging estimates from each “working” diffuser collect that occurred during that quarter. The only changes in IAS processing between the four test sets are the relative gains in the CPFs for each work order.
Figure 5 shows an example of how side-slither relative gains can aid in streaking reduction.
Figure 5.
Hard-stretched test image (WRS-2 11/7, 16 June 2013) of the coastal/aerosol band, zoomed in around FPM 8 with the following sets of relative gains applied: (a) diffuser-based; (b) first side-slither (3/26/13, Niger (NER)); (c) fourth side-slither (4/24/2013, Greenland (GRL)); (d) sixth side-slither (5/12/13, GRL).
Figure 5.
Hard-stretched test image (WRS-2 11/7, 16 June 2013) of the coastal/aerosol band, zoomed in around FPM 8 with the following sets of relative gains applied: (a) diffuser-based; (b) first side-slither (3/26/13, Niger (NER)); (c) fourth side-slither (4/24/2013, Greenland (GRL)); (d) sixth side-slither (5/12/13, GRL).
To determine whether or not the relative gains are changing over time, a simple exercise was conducted: all complete sets of side-slither relative gains were applied to three images of the same Greenland site—on 16 June 2013, 16 September 2013, and 1 April 2014.
Table 3 shows the mean streaking metric percentages for the complete set of side-slither relative gains across the three images. For comparison, the diffuser-based relative gains were also applied.
Table 3.
Mean streaking metric percentages for the 11/7 site acquired on the following dates: (a) 16 June 2013; (b) 16 September 2013; (c) 1 April 2014. Gray highlighting denotes collects closest to test image acquisition. Bolded numbers mark performance that is superior to the default processing parameters. CPF, calibration parameter file.
| Band | CPF | 3/26/13 (NER) | 4/5/13 (LBY) | 4/20/13 (EGY) | 4/24/13 (GRL) | 5/6/13 (EGY) | 5/12/13 (GRL) | 7/13/13 (GRL) | 11/30/13 (ATA) | 12/16/13 (ATA) | 1/1/14 (ATA) | 4/11/14 (NER) |
|---|
| C/A | 0.027 | 0.039 | 0.032 | 0.028 | 0.021 | 0.027 | 0.017 | 0.009 | 0.051 | 0.027 | 0.030 | 0.035 |
| Blue | 0.022 | 0.023 | 0.026 | 0.022 | 0.012 | 0.018 | 0.016 | 0.010 | 0.051 | 0.022 | 0.022 | 0.023 |
| Green | 0.012 | 0.017 | 0.016 | 0.026 | 0.008 | 0.044 | 0.007 | 0.006 | 0.028 | 0.012 | 0.012 | 0.017 |
| Red | 0.007 | 0.012 | 0.017 | 0.038 | 0.007 | 0.040 | 0.006 | 0.005 | 0.012 | 0.009 | 0.009 | 0.014 |
| NIR | 0.005 | 0.010 | 0.021 | 0.042 | 0.007 | 0.043 | 0.009 | 0.006 | 0.011 | 0.009 | 0.010 | 0.014 |
| PAN | 0.075 | 0.098 | 0.099 | 0.097 | 0.083 | 0.101 | 0.087 | 0.077 | 0.069 | 0.084 | 0.095 | 0.102 |
| Band | CPF | 3/26/13 (NER) | 4/5/13 (LBY) | 4/20/13 (EGY) | 4/24/13 (GRL) | 5/6/13 (EGY) | 5/12/13 (GRL) | 7/13/13 (GRL) | 11/30/13 (ATA) | 12/16/13 (ATA) | 1/1/14 (ATA) | 4/11/14 (NER) |
|---|
| C/A | 0.034 | 0.054 | 0.047 | 0.039 | 0.040 | 0.037 | 0.033 | 0.017 | 0.040 | 0.016 | 0.017 | 0.022 |
| Blue | 0.021 | 0.033 | 0.034 | 0.029 | 0.023 | 0.024 | 0.019 | 0.011 | 0.043 | 0.015 | 0.014 | 0.022 |
| Green | 0.010 | 0.024 | 0.022 | 0.027 | 0.016 | 0.046 | 0.012 | 0.011 | 0.022 | 0.011 | 0.012 | 0.019 |
| Red | 0.009 | 0.015 | 0.018 | 0.038 | 0.012 | 0.041 | 0.010 | 0.010 | 0.012 | 0.011 | 0.012 | 0.014 |
| NIR | 0.008 | 0.013 | 0.023 | 0.042 | 0.011 | 0.043 | 0.013 | 0.010 | 0.013 | 0.012 | 0.013 | 0.017 |
| PAN | 0.015 | 0.028 | 0.029 | 0.039 | 0.018 | 0.036 | 0.019 | 0.016 | 0.023 | 0.018 | 0.018 | 0.033 |
| Band | CPF | 3/26/13 (NER) | 4/5/13 (LBY) | 4/20/13 (EGY) | 4/24/13 (GRL) | 5/6/13 (EGY) | 5/12/13 (GRL) | 7/13/13 (GRL) | 11/30/13 (ATA) | 12/16/13 (ATA) | 1/1/14 (ATA) | 4/11/14 (NER) |
|---|
| C/A | 0.025 | 0.064 | 0.057 | 0.050 | 0.049 | 0.047 | 0.042 | 0.026 | 0.041 | 0.013 | 0.013 | 0.018 |
| Blue | 0.032 | 0.040 | 0.042 | 0.036 | 0.029 | 0.030 | 0.020 | 0.015 | 0.037 | 0.009 | 0.010 | 0.024 |
| Green | 0.017 | 0.025 | 0.025 | 0.030 | 0.018 | 0.049 | 0.013 | 0.011 | 0.020 | 0.007 | 0.007 | 0.015 |
| Red | 0.006 | 0.015 | 0.018 | 0.039 | 0.010 | 0.042 | 0.009 | 0.007 | 0.009 | 0.007 | 0.007 | 0.013 |
| NIR | 0.006 | 0.010 | 0.022 | 0.041 | 0.007 | 0.043 | 0.010 | 0.006 | 0.010 | 0.009 | 0.009 | 0.013 |
| PAN | 0.019 | 0.032 | 0.033 | 0.041 | 0.016 | 0.039 | 0.015 | 0.013 | 0.017 | 0.010 | 0.010 | 0.033 |
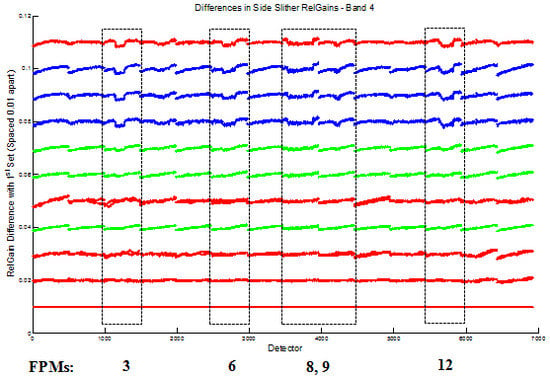
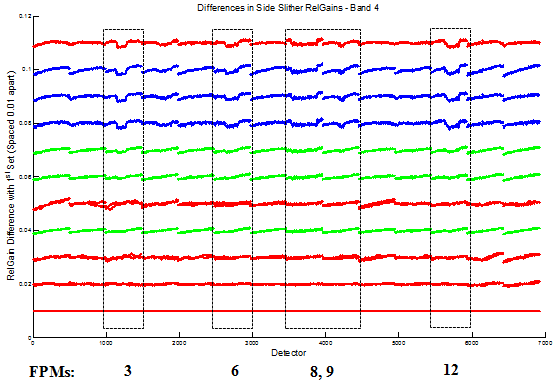
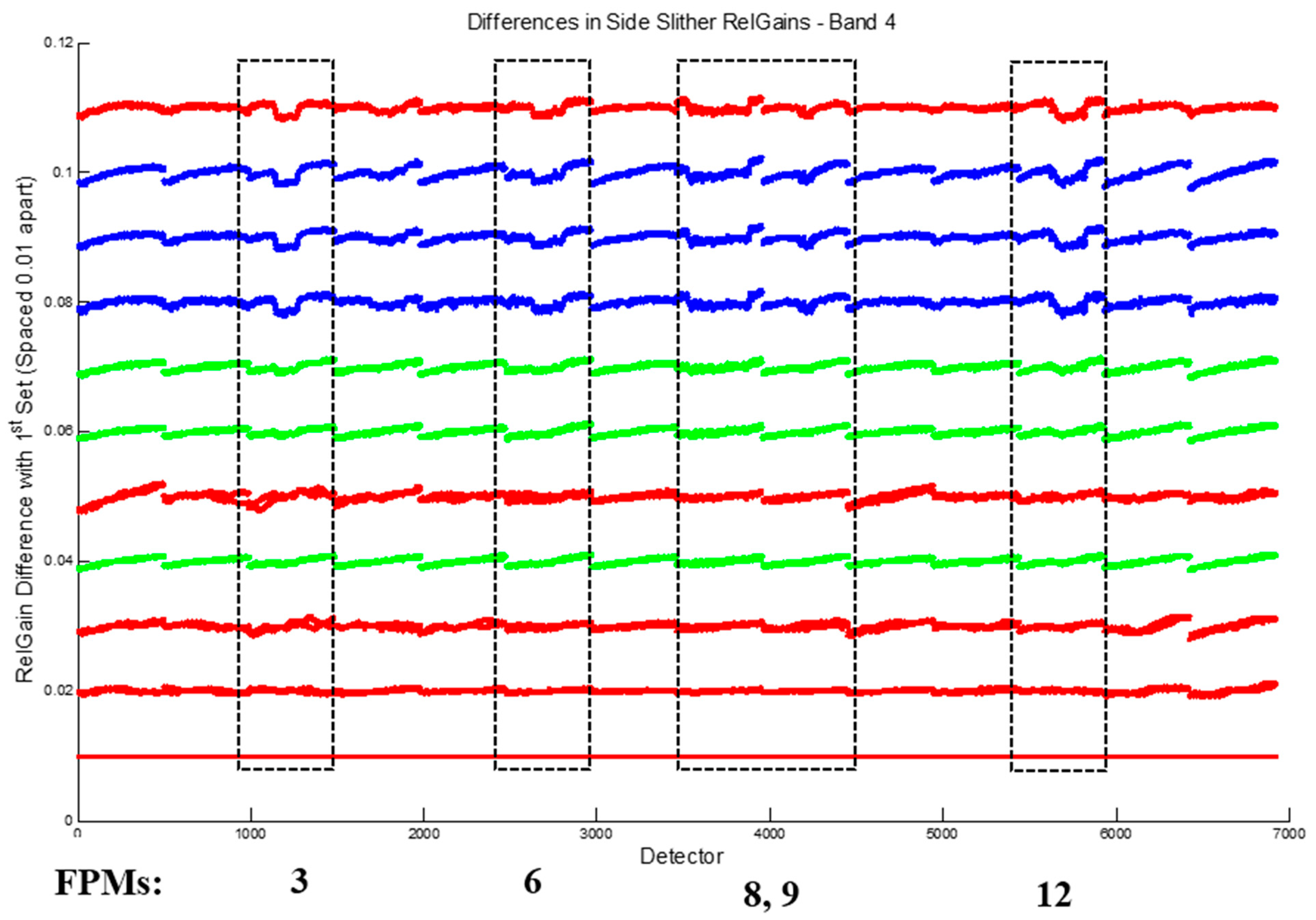
Table 3 shows that gains derived from side-slither collects closer to the image acquisition date indeed provide the most streaking improvement in the time series. In several cases, relative gains from side-slither collects over polar regions reduce visible band streaking more than current processing parameters. Although the diffuser-based gains showed the best streaking improvement in the red and NIR bands, side-slither gains still corrected streaking to within 0.005% of them. In typical Earth imagery, this means the difference in streaking reduction between sets will not be visually apparent. The relative gains applied to the Niger test set over three similarly different dates resulted in similar conclusions: gains derived from desert-based side-slither collects close to test image acquisition dates (particularly Niger and Libya) correct streaking to within 0.01% of current processing parameters. Since relative gains from side-slithers closer to the test image date consistently perform better, it appears that detector relative gains are changing over time. To gain a clearer sense of how fast relative gains are changing over time, the differences between the first set of side-slither relative gains with each subsequent set was calculated for each band and plotted. Due to the large temporal gap between some gain sets, they are plotted in the order they were collected, starting from the bottom, as shown in
Figure 6.
Figure 6.
Temporal differences between side-slither relative gains in the red band using the first set as a basis. Note that each collect is color-coded by the region slithered: red for desert, green for Greenland and blue for Antarctica. Boxed FPMs are numbered below the plot.
Figure 6.
Temporal differences between side-slither relative gains in the red band using the first set as a basis. Note that each collect is color-coded by the region slithered: red for desert, green for Greenland and blue for Antarctica. Boxed FPMs are numbered below the plot.
Figure 6 shows a clear emergence of differences of up to 0.23% in side-slither relative gains (referred to as RelGains in the plot title) over time for the red band in FPMs 3, 6, 8, 9 and 12. Other visible bands showed similar change traceability, which is consistent with the temporal changes shown in solar collect data [
14]. While some differences exist over time for the SWIR bands, they are harder to discern in temporal plots due to substantial signal-level differences between collects. Thus, these temporal differences were quantitatively assessed for further clarity.
Table 4 shows the maximum detector relative gain percent difference between first side-slither collect and each successive collect.
Table 4 shows that every spectral band has detectors that are drifting, some as much as 0.47% over the course of a year. The coastal/aerosol band, whose differences do not appear dependent on collect signal level, shows the most drift over time. In the SWIR bands, detectors are drifting as much as 0.38% over a year. Note that when considering SWIR detector drift, the relative gain differences from the Arctic/Antarctic sites are excluded, since those percent differences are due to the low signal level. Although the VNIR bands are most accurately characterized using side-slithers over polar regions, the gains derived for these bands over desert regions are useful for continuous tracking of detector drift.
Table 4.
Maximum relative gain percent differences obtained from side-slither collects as a function of time during the first year of OLI operation.
Table 4.
Maximum relative gain percent differences obtained from side-slither collects as a function of time during the first year of OLI operation.
| Band | 3/26/13 (NER) | 4/5/13 (LBY) | 4/20/13 (EGY) | 4/24/13 (GRL) | 5/6/13 (EGY) | 5/12/13 (GRL) | 7/13/13 (GRL) | 11/30/13 (ATA) | 12/16/13 (ATA) | 1/1/14 (ATA) | 4/11/14 (NER) |
|---|
| C/A | - | 0.09 | 0.24 | 0.15 | 0.29 | 0.22 | 0.25 | 0.46 | 0.42 | 0.47 | 0.44 |
| Blue | - | 0.12 | 0.16 | 0.16 | 0.29 | 0.2 | 0.19 | 0.27 | 0.21 | 0.25 | 0.2 |
| Green | - | 0.08 | 0.15 | 0.11 | 0.17 | 0.12 | 0.14 | 0.22 | 0.21 | 0.23 | 0.16 |
| Red | - | 0.12 | 0.14 | 0.12 | 0.21 | 0.14 | 0.13 | 0.18 | 0.19 | 0.23 | 0.15 |
| NIR | - | 0.13 | 0.2 | 0.13 | 0.2 | 0.13 | 0.14 | 0.13 | 0.16 | 0.23 | 0.1 |
| SWIR1 | - | 0.22 | 0.21 | 0.88 | 0.26 | 0.68 | 1.16 | 1.39 | 1.06 | 1.19 | 0.38 |
| SWIR2 | - | 0.24 | 0.22 | 0.72 | 0.25 | 0.68 | 0.75 | 0.63 | 0.68 | 1.24 | 0.24 |
| PAN | - | 0.11 | 0.17 | 0.17 | 0.27 | 0.2 | 0.18 | 0.22 | 0.22 | 0.26 | 0.22 |
4.2. DCC Image Statistics for Cirrus Band
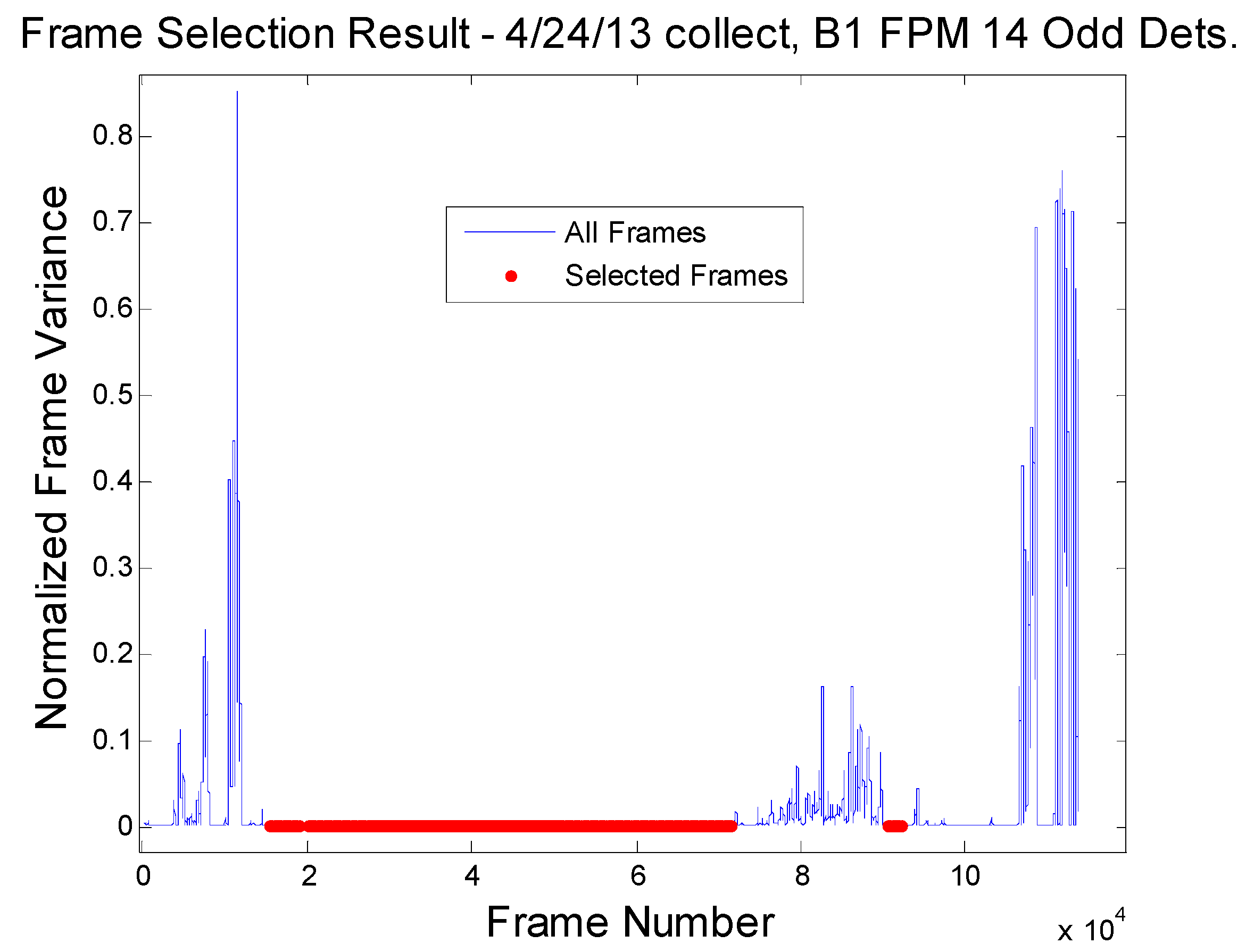
Due to the scarcity of DCC scenes meeting the selection criteria, the time frame for the images queried was from May 2013, to October 2013, crossing over three different quarters. As a result, statistics from 69 DCC scenes were used for gain derivation. To assess the effectiveness of these gains in streaking reduction, they were applied to several DCC test scenes—part of the derivation collection and not—and compared to the performance of diffuser-based relative gains using the scene-based streaking metric defined earlier. Results were similar on all test scenes, and a representative example is given here.
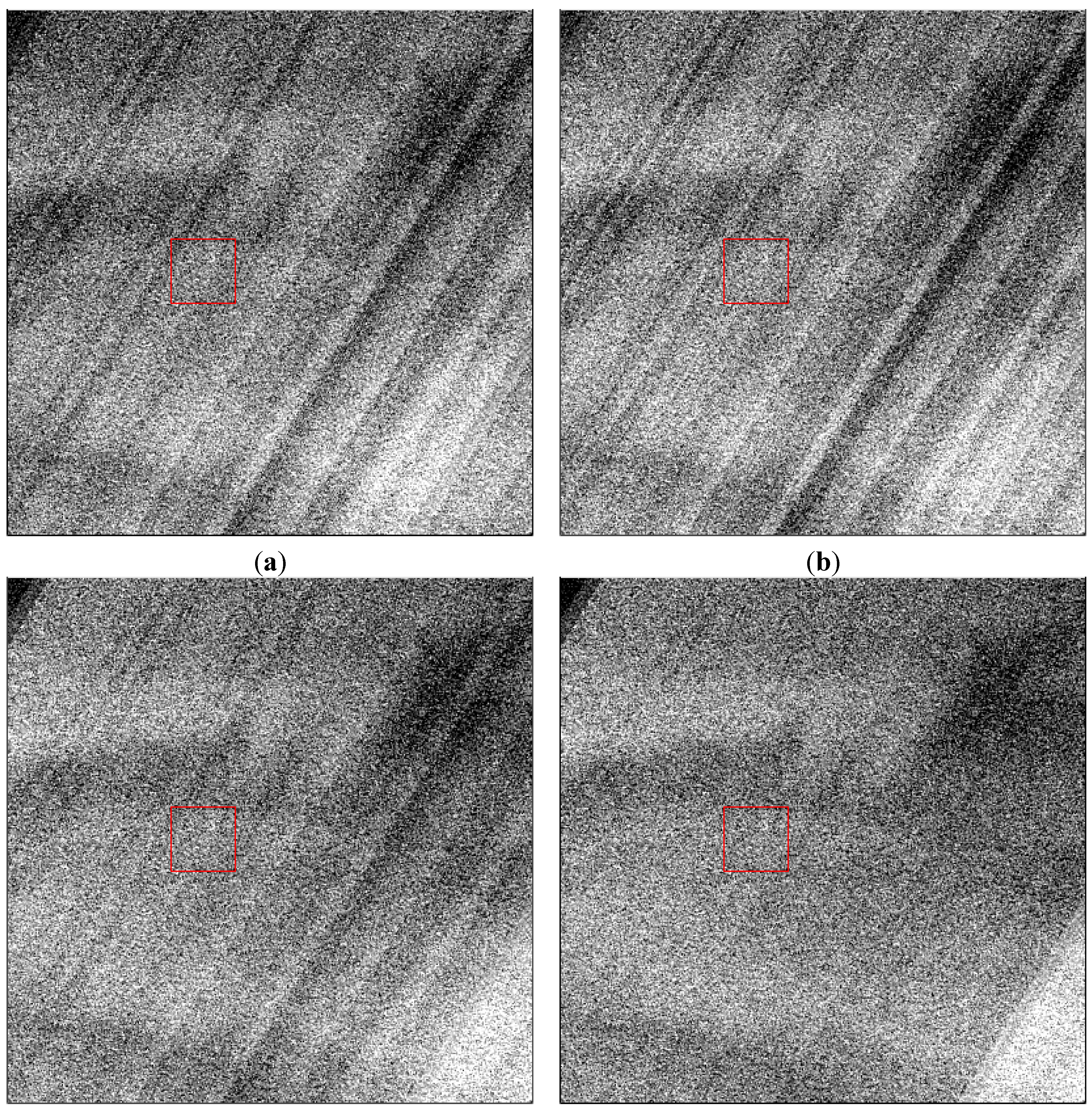
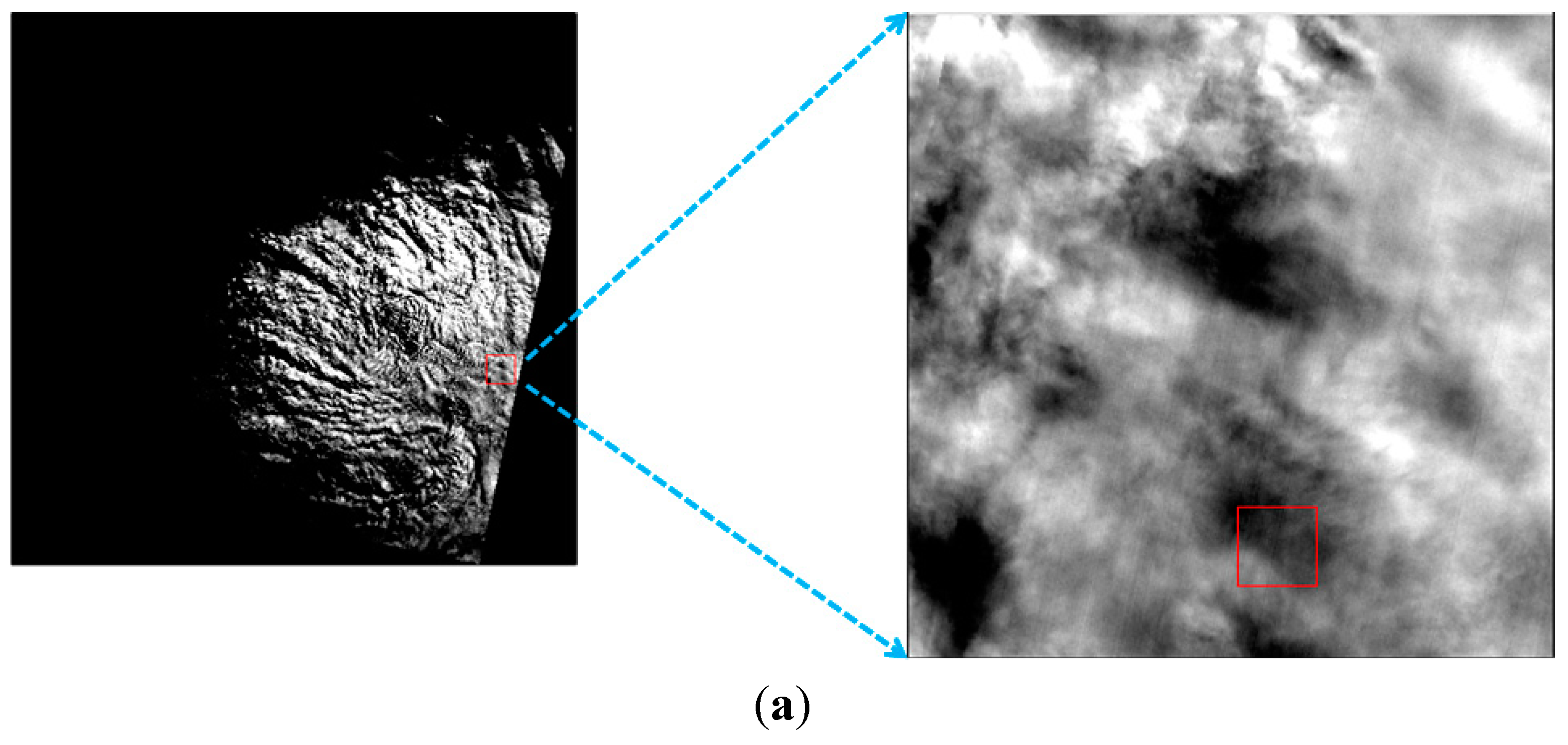
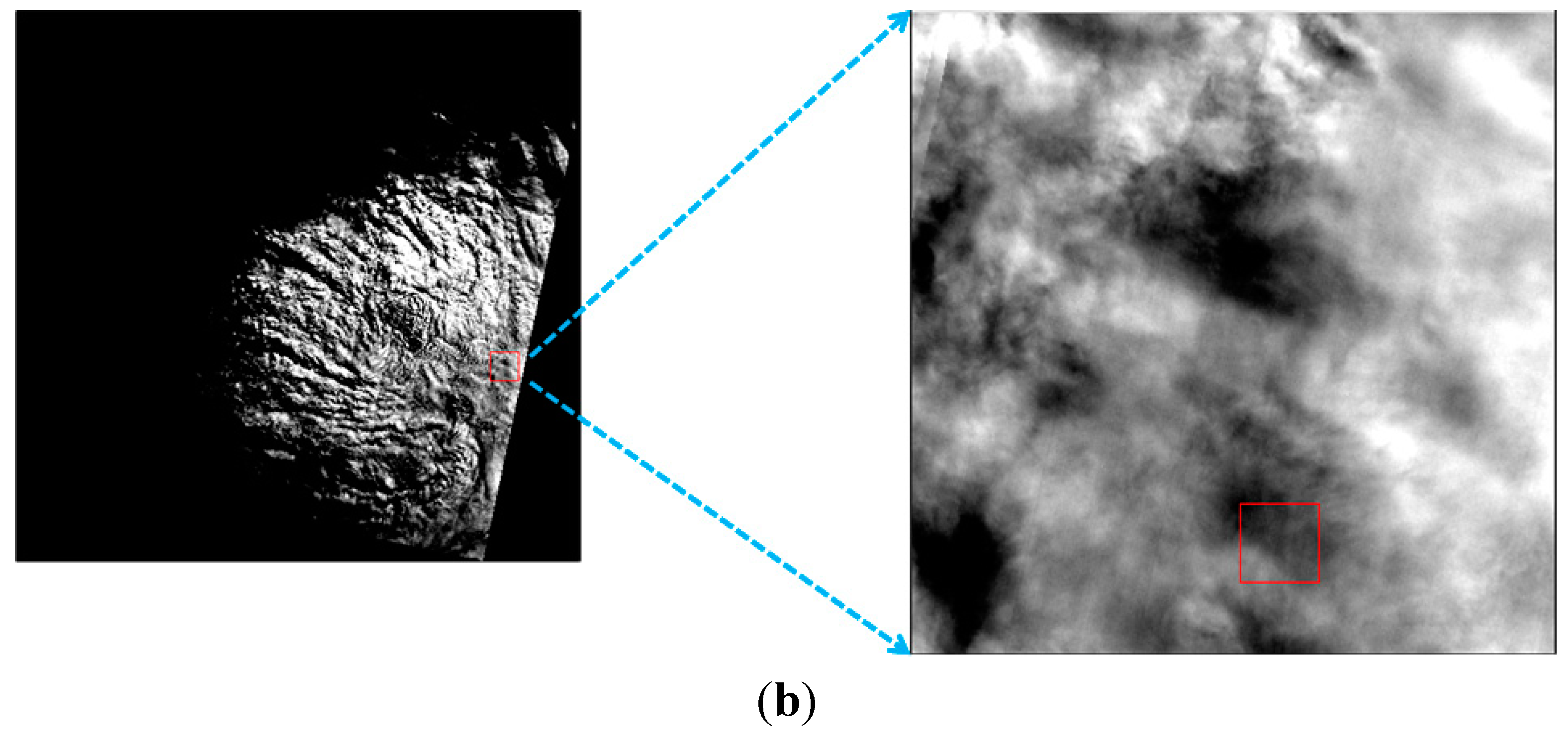
Figure 7 shows a visual comparison between gain sets on a DCC scene. This particular test scene is part of the collection used to derive the relative gains. Note that the zoomed portion of
Figure 7b shows notable streaking improvement over that apparent in
Figure 7a. FPM boundaries are clearly present in the full image in
Figure 7b, since the DCC relative gains were derived only on an FPM level. For a quantification of streaking in both test images, refer to
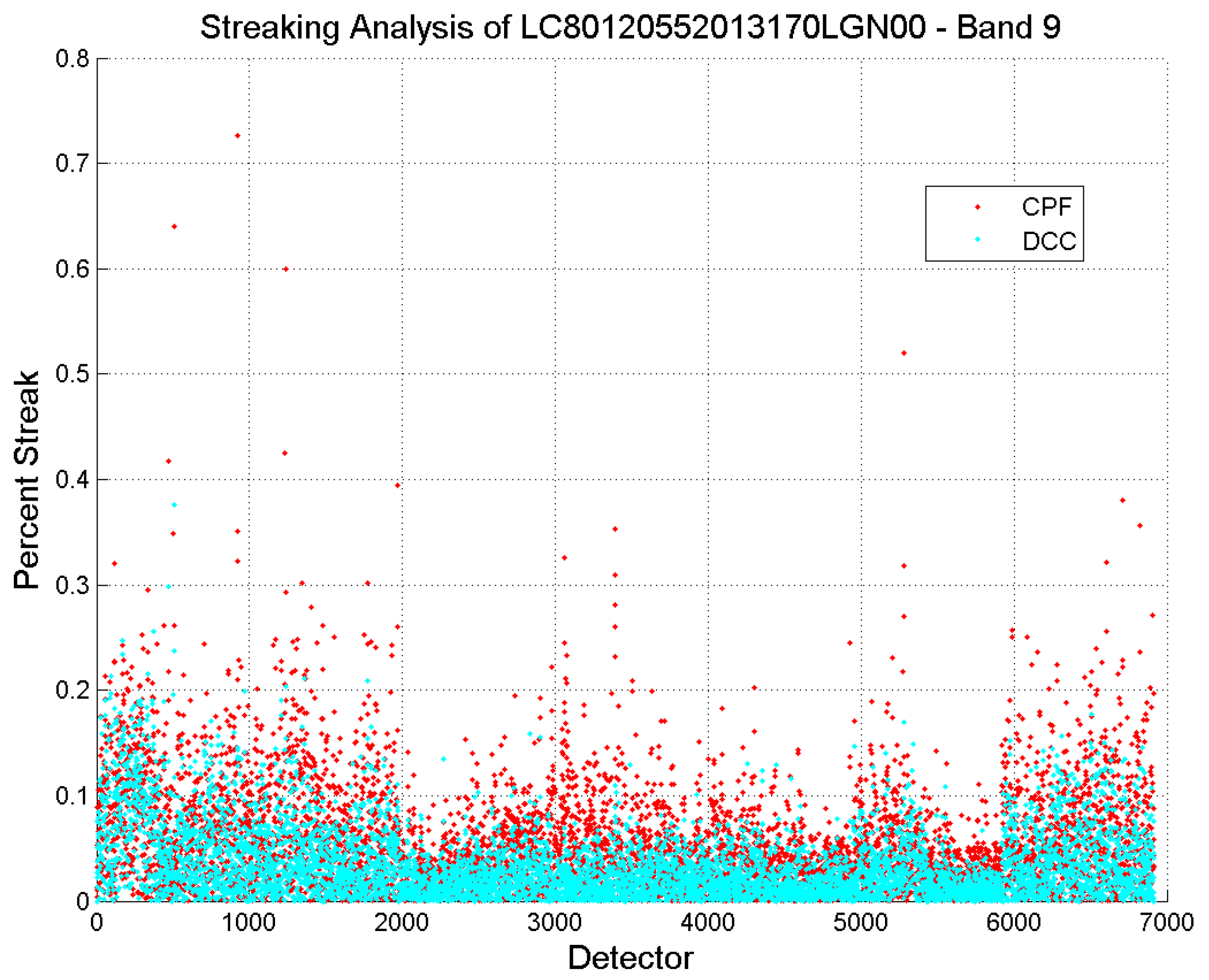
Figure 8.
Figure 8 shows that streaking is generally lower across the scene when corrected with DCC relative gains. The streaking metric for the DCC relative gain corrected scene did not go above 0.4% and had many fewer detectors above 0.2% as compared to the CPF gains. Although the test scene was by no means uniform, use of the streaking metric provides some form of quantitative performance evaluation for relative gains for this band.
Figure 7.
Hard-stretched test image for the cirrus band (WRS-2 12/55, 19 June 2013) zoomed in on FPM 14 with the following relative gains applied: (a) diffuser-based; (b) deep convective cloud (DCC)-based.
Figure 7.
Hard-stretched test image for the cirrus band (WRS-2 12/55, 19 June 2013) zoomed in on FPM 14 with the following relative gains applied: (a) diffuser-based; (b) deep convective cloud (DCC)-based.
Figure 8.
Streaking analysis of the DCC test image shown in
Figure 7.
Figure 8.
Streaking analysis of the DCC test image shown in
Figure 7.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








