1. Introduction
In the past few decades, earth observation satellites (EOS) have provided large amounts of remotely sensed data depicting the earth’s surface at a variety of spatial and temporal scales. Global or regional land cover maps from these remotely sensed data are typically based on image classification and a great number of classification methods have been developed, ranging from classical ones such as minimum distance [
1] to more advanced ones such as support vector machine [
2]. Generally, two groups of classification methods exist: per-pixel (hard) and sub-pixel (soft) classification [
3]. The hard classification methods classify the remotely sensed data into maps where each pixel belongs to a single land cover/vegetation/thematic class, whereas the soft classification methods categorize each pixel into several classes simultaneously [
3]. Soft classification methods have recently gained wider use because of their ability to continuously represent and estimate the area of land cover at the sub-pixel level, especially for land cover mapping using coarse resolution data where mixed pixels dominate.
Accordingly, as an indispensable part of the classification process, there is a great need to develop methods for validating or accessing the accuracy of soft classification maps because the error matrix developed for hard classification accuracy assessment [
4] may not be appropriate for use in representing the soft classification accuracy [
5]. The major issue is that accuracy information will be lost if the Boolean operator typically used in a conventional error matrix to record the attribute in the reference sample unit as 1 for “correct” and 0 for “wrong” is used when determining the accuracy of a soft classification map [
5]. In other words, the entire pixel is no longer either right or wrong, but rather soft classification labels parts of the pixel into different classes. Given this issue, much effort has been made to generalize the conventional error matrix and adapt it for use in soft classification. Until now, various approaches have been advanced for the sub-pixel error matrix based on a number of mathematical theories such as minimum operator [
5], multiplication operator [
6] and composite operator [
7,
8]. From the soft error matrix, a number of descriptive and analytical statistical measures can be calculated including overall accuracy (
oa), kappa coefficient (
kappa), user’s accuracy (
ua) and producer’s accuracy (
pa) [
4]. It is worth noting that all these methods for constructing the soft error matrix were developed under the assumption that the classified map is perfectly co-registered between the reference data and the ground. However, in practice, no map is free of positional errors and the assessment of thematic accuracy must include or incorporate some measure of positional accuracy [
9,
10,
11].
Positional error is regarded as one of the great sources of uncertainty in accuracy assessment [
12,
13,
14]. Positional errors mainly arise from the geometric distortion of the image, including earth rotation effects, scanning system, and the random spacecraft movement [
15], which take on different forms of distortion such as scaling, rotation, translation and scan skewing [
16]. Image registration includes two steps to correct these issues. The first is called systematic correction using ephemeris data from the spacecraft and results in approximate image coordinates. The second step is precision correction which registers the image to a series of ground features by using ground control points. For accuracy assessment, the positional error between the classification map and the reference data is not limited only to image registration, but is also subject to GPS error [
17] because the ground reference data are often collected using a GPS receiver. The synchronization error between the satellite and the code-phased GPS receiver results in a locational error ranging from 5 to 20 meters [
18]. The assumption therefore, is that the difference between the classification map and reference data results only from the classification error not being satisfied. However, the non-thematic errors arising from misregistration can be a significant contribution to the error matrix that may then mask the real thematic accuracy information. Powell
et al. [
19] determined that more than 30% of thematic errors for Landsat TM could be attributed to the positional errors. This issue is more severe in heterogeneous landscapes where several map classes are located together [
11]. Intuitively, for soft classification, coarser spatial resolution increases the number of mixed pixels in the classification maps [
20], making the soft error matrix more sensitive to positional errors because even a slight location error between the classification and the reference map can substantially change the proportion of map classes within that mixed pixel.
Higher resolution images are often widely accepted as a substitute for the ground reference data used in validating the classification map. A half-pixel registration accuracy between the classification map and the reference map has often been reported [
21] and accepted as common, especially for moderate resolution imagery such as Landsat Thematic Mapper imagery. However, whether this requirement holds for soft classification accuracy assessment and whether it changes with the varied spatial resolutions is still unknown.
Many projects have been conducted in the area of land cover dynamics, e.g., map comparison for change detection analysis. It has been shown that a slight location error can result in a great impact on the accuracy of change detection [
16,
22,
23] and that a registration accuracy of 0.2 pixels is required to guarantee the error of change detection is less than 10% [
16,
24]. It was also found that the effect of positional error is influenced by the heterogeneity of the land cover. The more fragmented land cover maps produce the greater effect on the change detection error owing to positional error [
25]. Aggregation-based or object-based change detection methods have been suggested to reduce the impact of the position on the change detection accuracy [
26,
27,
28,
29]. Studies of misresgistration issues in change detection analysis and soft classification have therefore provided the impetus for this paper. These issues include modeling the analysis of positional error and the study of the spatial characteristics of the land cover.
In this paper, therefore, the spatial characteristics of land cover and spatial resolution were simulated to test the sensitivity of thematic errors caused by the positional errors on soft classification accuracy assessment. The purpose of this study was to: (1) examine the impact of positional accuracy on the measures derived from the soft error matrix; (2) provide insight into how this effect changes with varied landscape structure and spatial resolution; and (3) facilitate the consideration of registration for future soft classification accuracy assessment.
3. Results
Figure 3,
Figure 4,
Figure 5 and
Figure 6 show the relationship between OA-errors and the positional errors while
Figure 7,
Figure 8,
Figure 9 and
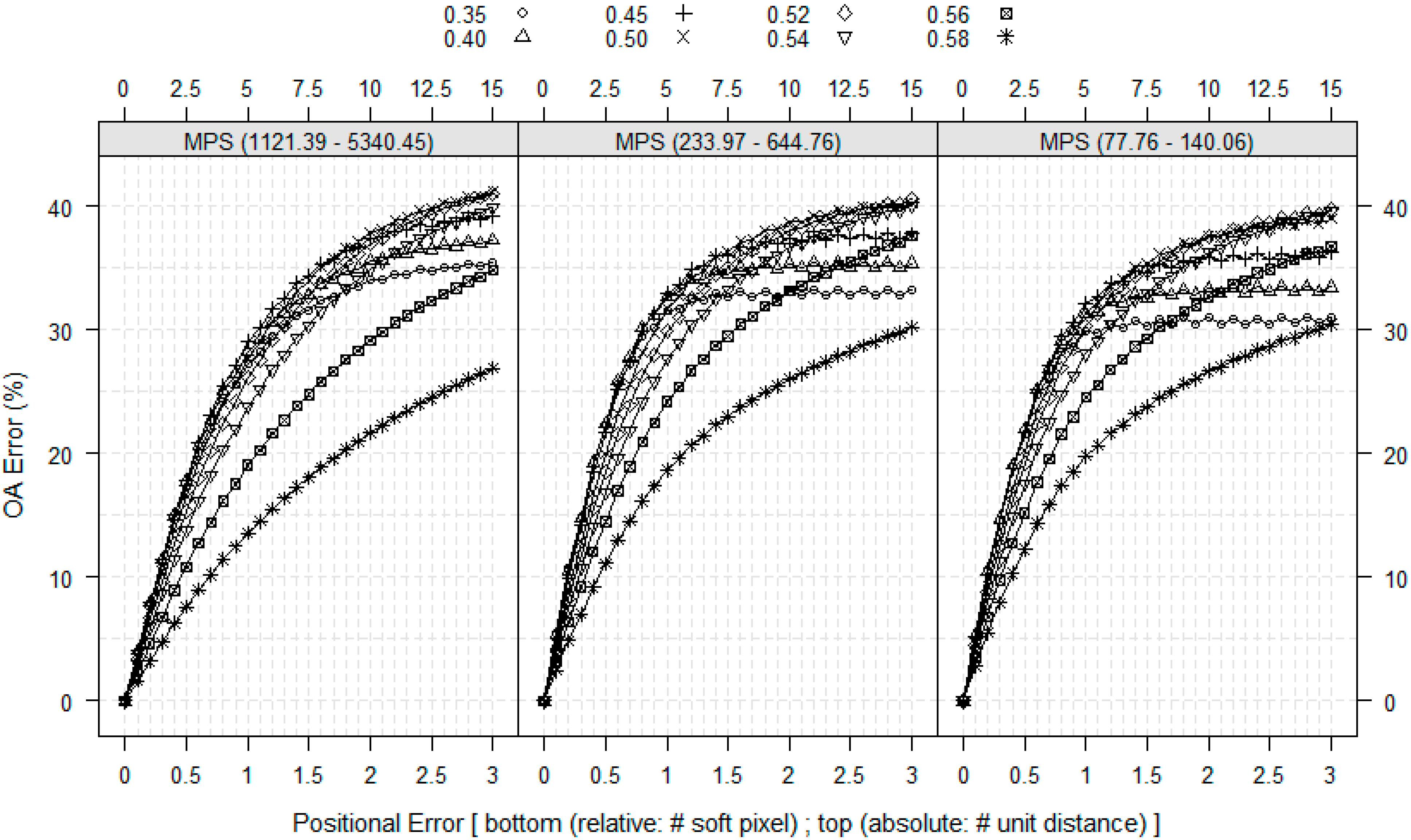
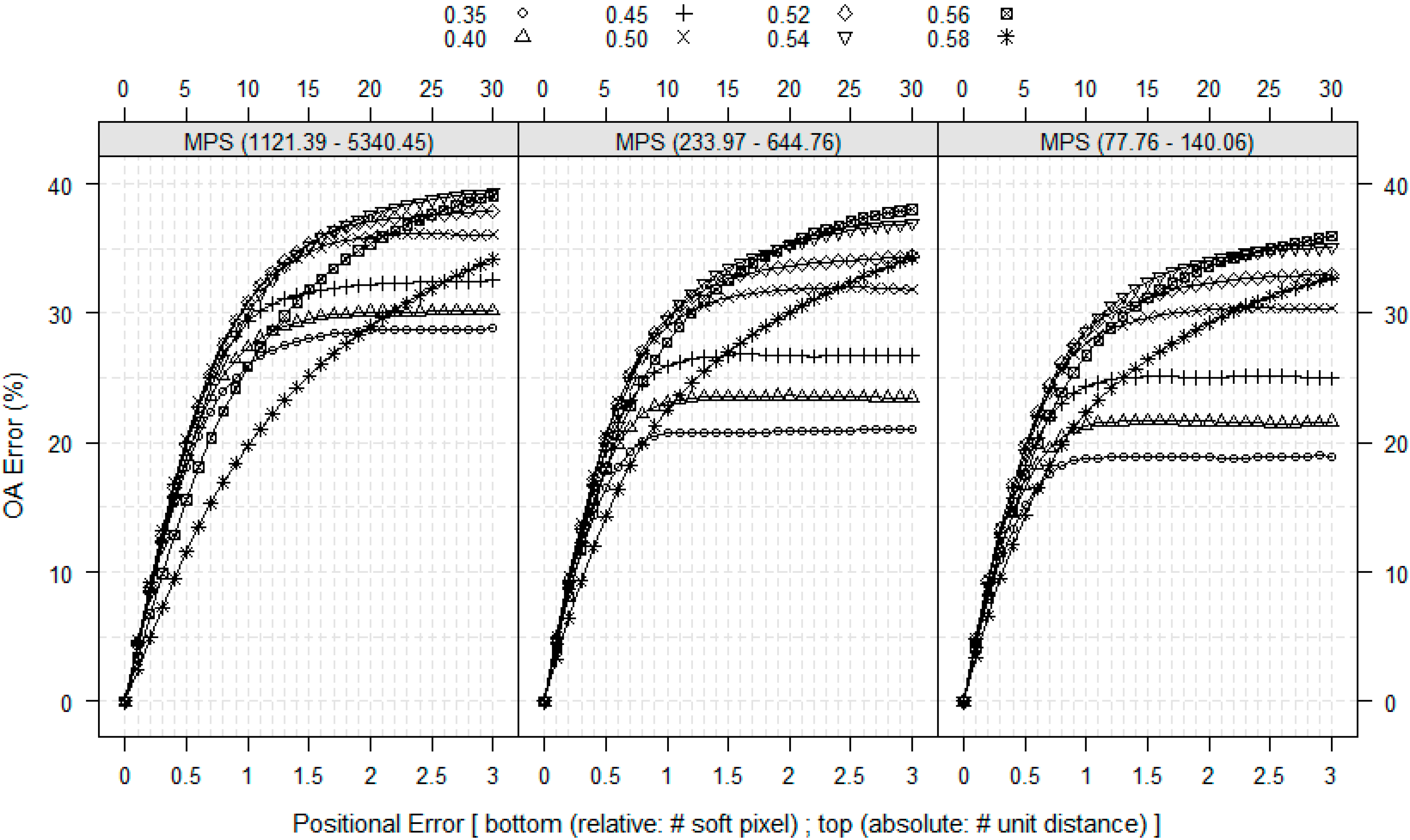
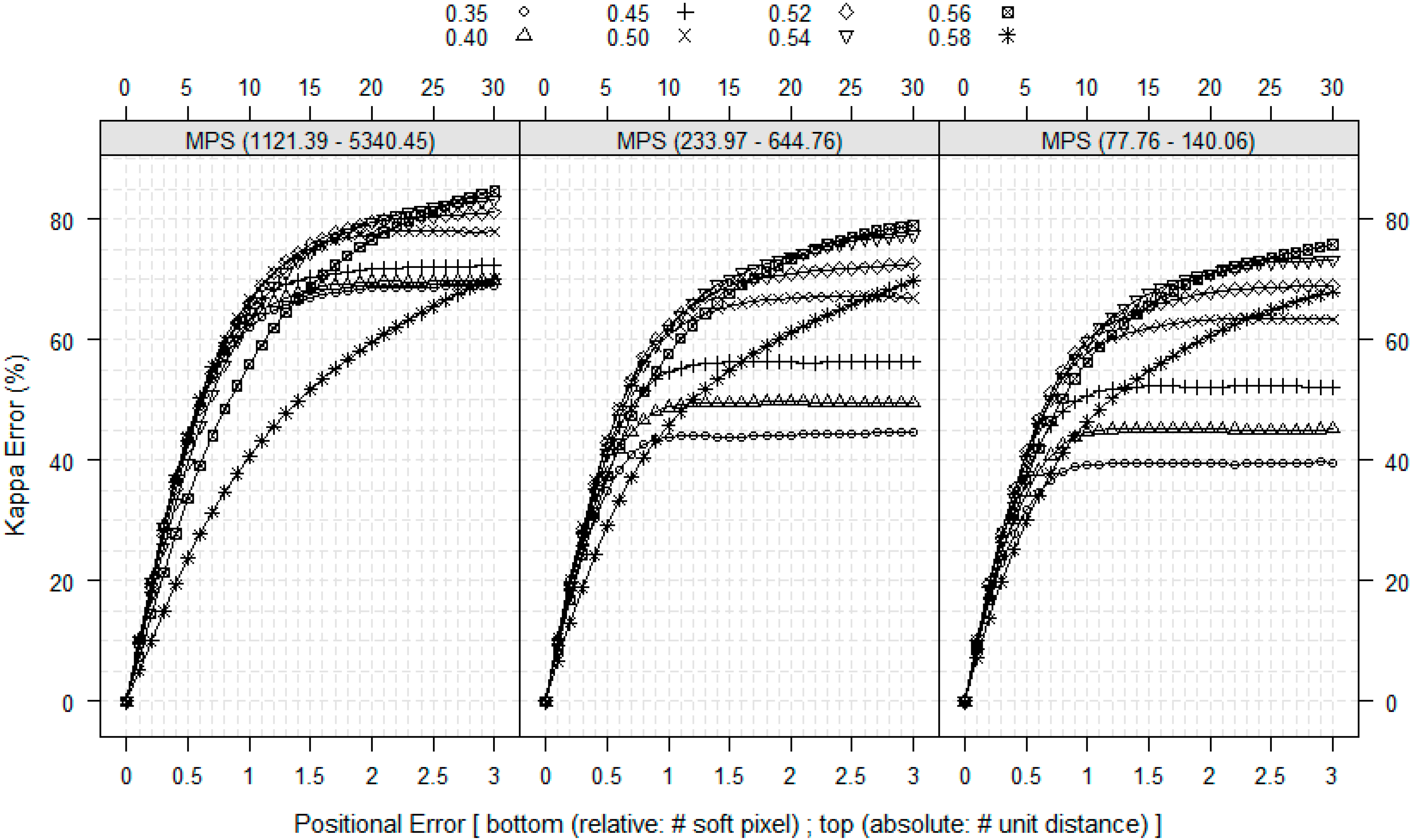
Figure 10 show the link between kappa-errors and the positional errors where the spatial resolution is 1, 2, 5, and 10 unit distances, respectively. Each figure presents the relationship divided into three groups by MPS: large MPS or mean patch size (1121.39–5340.05), middle MPS (233.97–644.76, and small MPS (77.76–140.06) from the left to the right. Within each group, the P value (representing the fragmentation) varies from 0.35 to 0.58 and the MPS also varies accordingly. The bottom abscissa value is the relative distance based on the soft pixel associated with a given spatial resolution while the top abscissa value is the absolute distance based on the unit distance corresponding to the relative distance. The same relative positional error appears to have different absolute distance because of the spatial resolution.
Figure 3 reveals the impact of a positional error ranging from 0 to 3 pixels on the OA-error with varying fragmentation and MPS at a spatial resolution of 1 unit distance. It was determined that as a positional error increases, so do the OA-errors. When there was no positional error, there was no OA-error. The rate of growth is different depending on the amount of fragmentation and MPS. For example, the rate is very high when the P is 0.35 and MPS is 77.76, whereas the rate is low when P is 0.58 and MPS is 5340.45. Generally, smaller MPS and higher fragmentation (lower P values) produced a greater positional error effect on OA-error. As can be seen in
Figure 3, the corresponding lines in the left group (MPS of larger size) are lower than the middle group (MPS of medium size) which is lower than the right group (MPS of small size). At the positional error of three soft pixels, the largest impact results in an OA-error of 44.6% while the least impact produces only 10.4%.
Figure 3.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 1 unit distance.
Figure 3.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 1 unit distance.
Figure 4.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 2 unit distance.
Figure 4.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 2 unit distance.
Figure 5.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 5 unit distance.
Figure 5.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 5 unit distance.
Figure 6.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 10 unit distance.
Figure 6.
Impact of positional error on OA-error at different landscape characteristics using a spatial resolution of 10 unit distance.
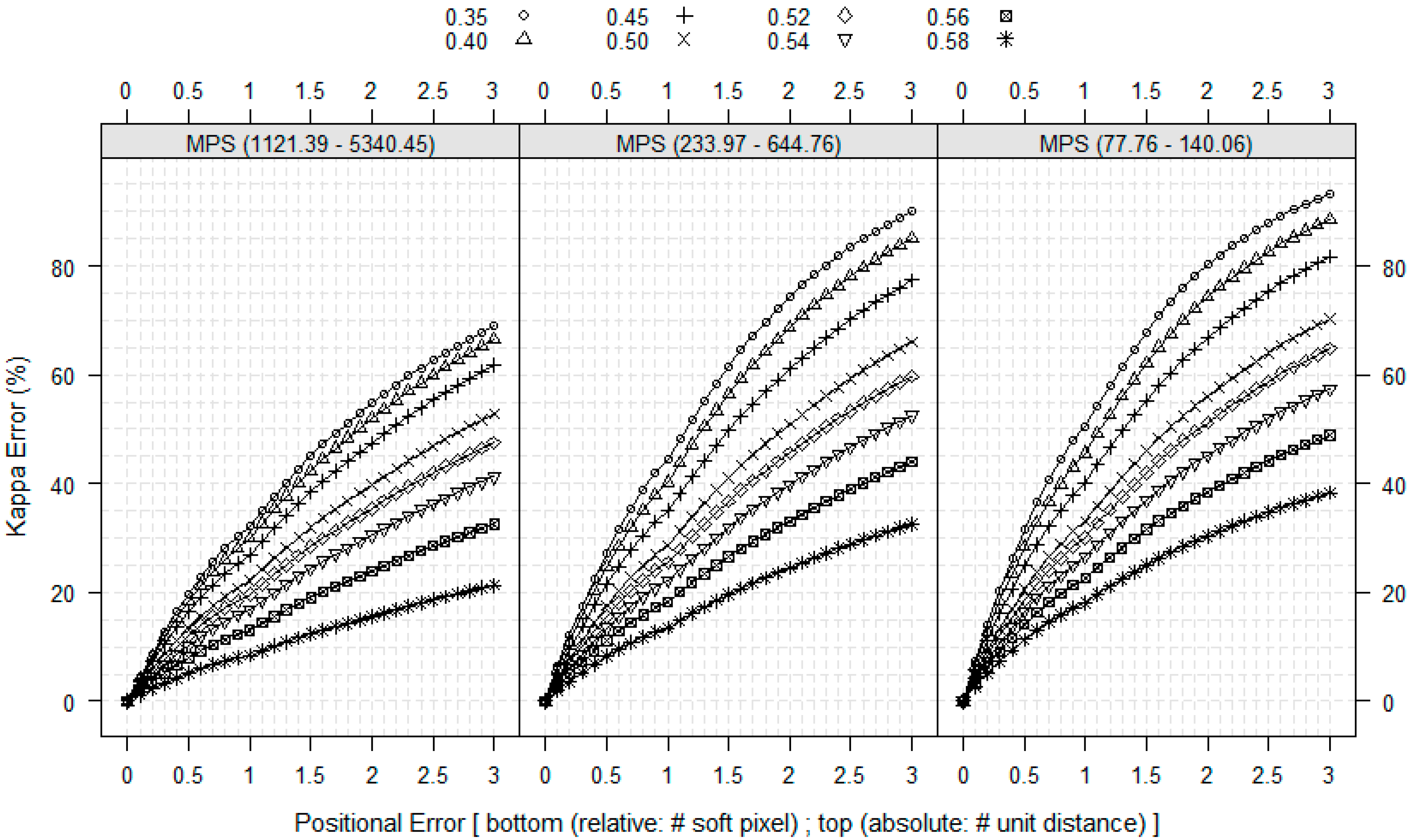
Figure 7.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 1 unit distance.
Figure 7.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 1 unit distance.
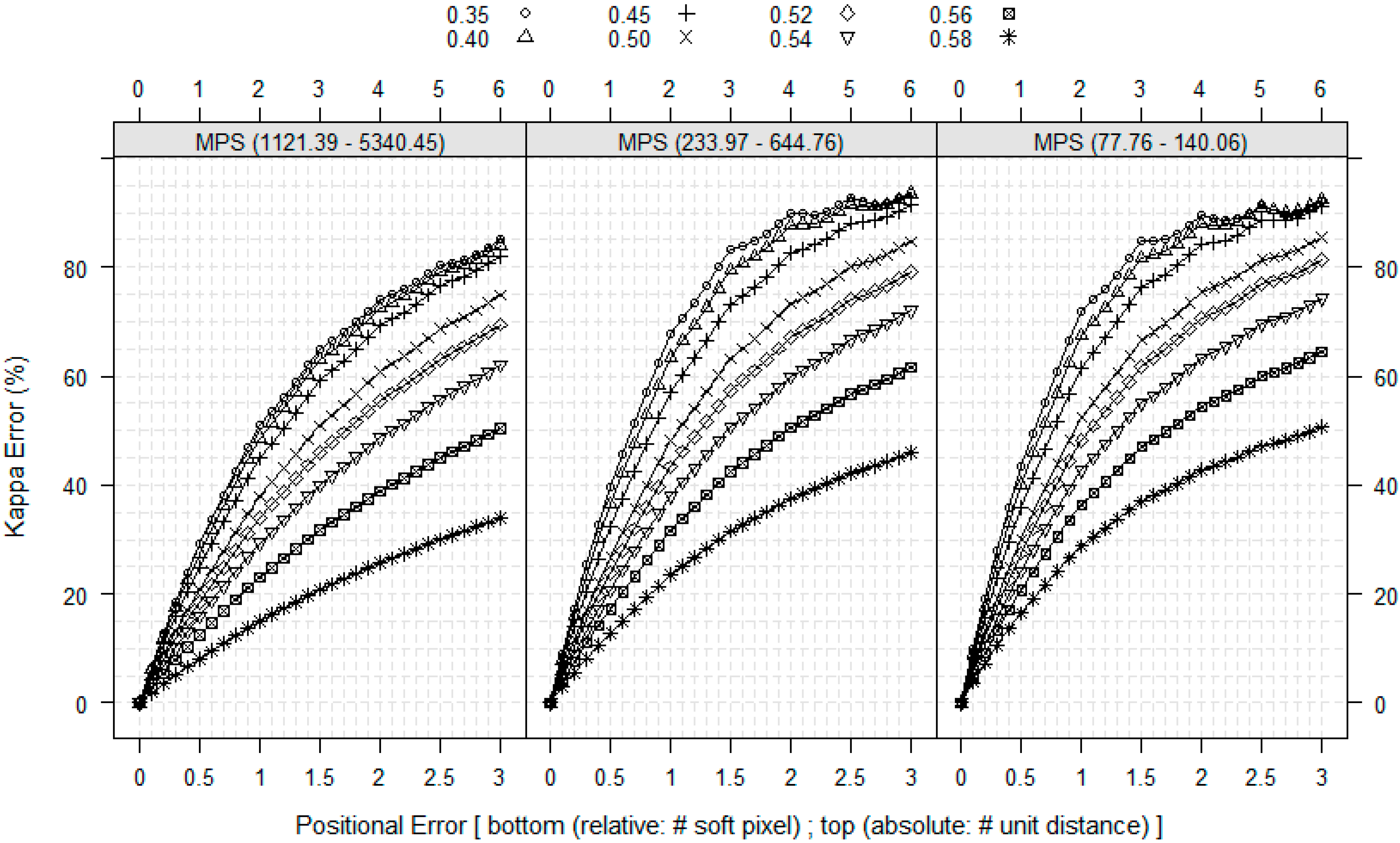
Figure 8.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 2 unit distance.
Figure 8.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 2 unit distance.
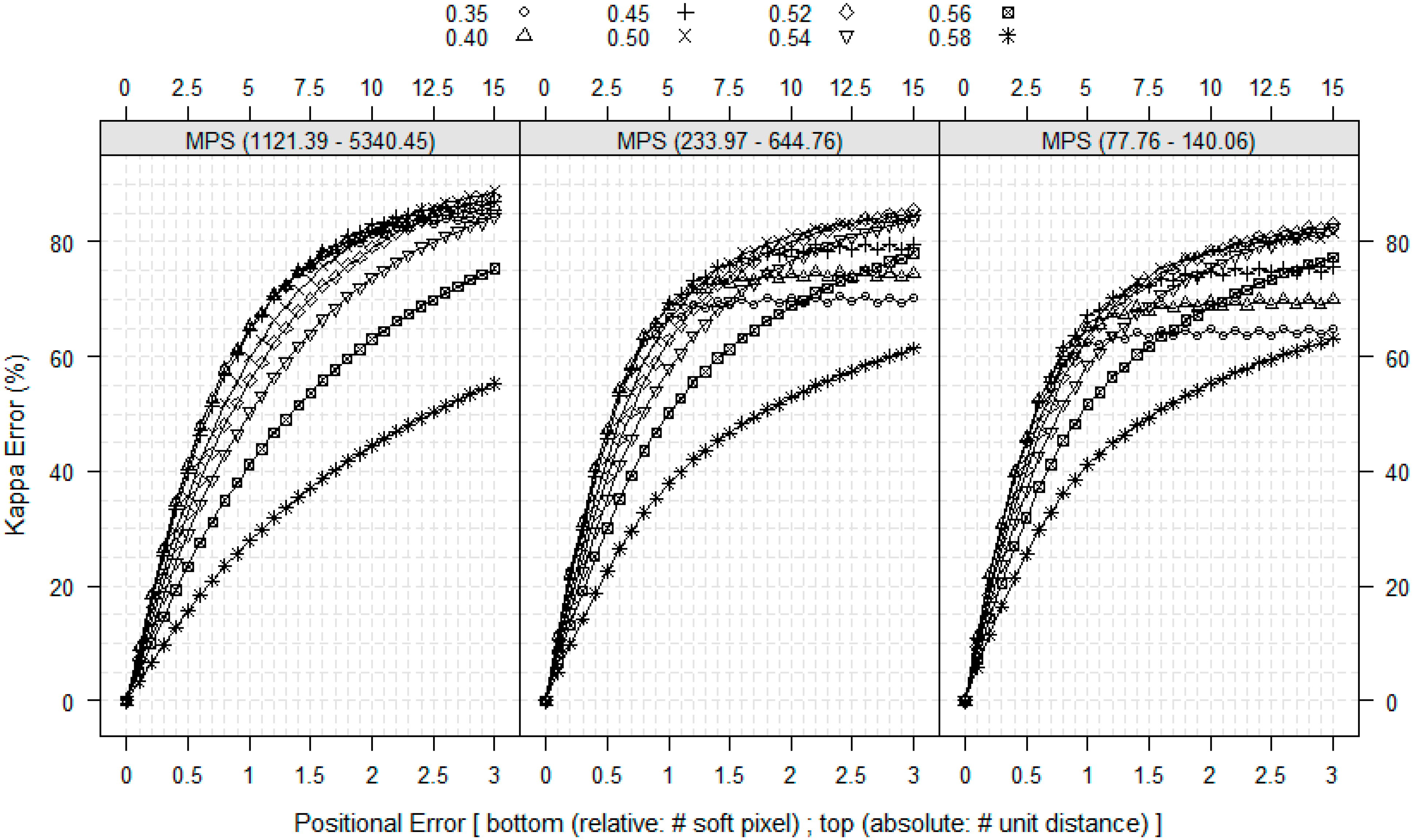
Figure 9.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 5 unit distance.
Figure 9.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 5 unit distance.
Figure 10.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 10 unit distance.
Figure 10.
Impact of positional error on kappa-error at different landscape characteristics using a spatial resolution of 10 unit distance.
The results of
Figure 3 also hold in
Figure 4 where the spatial resolution is 2 unit distance. The only difference is that the 2 unit distance spatial resolution creates less impact of positional error on the OA-error than the 1 unit distance with the same amount of absolute distance but creates greater impact with the same amount of relative distance. For instance, the 3 unit distance positional error created nearly 28.8% OA-error when P equals 0.35 with MPS being 1121.39 at the spatial resolution of 1 unit distance, whereas its counterpart created 27.2% OA-error at the spatial resolution of 2 unit distance. However, the 3 soft pixel positional error created nearly 28.8% OA-error when P equals 0.35 with MPS being 1121.39 at the spatial resolution of 1 unit distance, whereas its counterpart creates 35.5% OA-error at the spatial resolution of 2 unit distance. It was also found that some of the lines with P being 0.35 and 0.40 show a trend of becoming stable in the middle and small MPS groups when positional errors are greater than 1.5 soft pixels.
These results change when the spatial resolution is increased to 5 unit distance (
Figure 5). Compared with
Figure 3 and
Figure 4, the lowest impact remained the same while the highest impact is not when P equals to 0.35 but when P is equal to 0.45 or 0.50. The lines at P equals 0.35, 0.40 and 0.45 show a trend becoming stable after the positional errors reach 1 soft pixel. Compared to what was shown in
Figure 3 and
Figure 4, the corresponding lines with the same fragmentation lie in different groups of MPS and do not have much difference.
Compared to the spatial resolutions of 1, 2, and 5 unit distances, the pattern at a spatial resolution of 10 unit distance are clearly different (
Figure 6). The highest impact is shown on the line with P being 0.54 or 0.56 for all groupings of MPS. However, the lowest impact is shown on the line with P being 0.58 when the positional error is small, but changes to P being 0.35 when the positional error is large. The corresponding lines in the left group (MPS of larger size) are higher than the middle group (MPS of medium size) which is higher than the right group (MPS of small size), which is the complete opposite of the results from
Figure 3 and
Figure 4.
A comparison of
Figure 3 to
Figure 6 by MPS grouping shows that under the same spatial characteristics, the spatial resolution alters the impact of positional error on the OA-error. For example, with P being 0.58 and MPS being 5340.45, the OA-error ranges from 0% to 10.4% at the spatial resolution of 1 unit distance while it varies from 0% to 34.2% at the spatial resolution of 10 unit distance. As the spatial resolution becomes coarser, the group of lines becomes denser, meaning that the degree of influence of fragmentation is less. It also shows as the spatial resolution becomes coarser, the three groups of MPS do not change the shape of the lines as much with the same fragmentation.
The same analysis that was performed with OA-error can also be shown using kappa-error. Compared to the impact of positional error on the OA-error, the effect on the kappa-error is higher (
Figure 7,
Figure 8,
Figure 9 and
Figure 10). With three soft pixel positional errors, the kappa-error ranges from 0% to 93.7%. The patterns of fragmentation and MPS are the same as was found in OA-error analysis.
Table 4 shows the required registration accuracy (# of soft pixels) to keep the OA and kappa error under 10% for different landscape patterns at a spatial resolution of 1, 2, 5, and 10 unit distance respectively. A value of 10% was selected here as a reasonable amount of error contribution from positional error in a typical thematic accuracy assessment. It is clear that for most landscape patterns simulated here, a half of a soft-pixel registration accuracy is not sufficient to guarantee the OA-error is less than 10% except when the spatial resolution is 1 unit distance. To retain the OA-error at less than 10%, the required registration accuracy for a spatial resolution of 1 unit distance ranges from 0.3 to 2.8 soft pixels with an average of 0.85 pixels. This requirement then translates to a range of from 0.2 to 1.4 soft pixels, 0.1 to 0.6 soft pixels, and 0.2 to 0.4 soft pixels at spatial resolutions of 2, 5, and 10 unit distances, respectively. To retain the kappa-error at less than 10%, the required registration accuracy for spatial resolution of 1, 2, 5, and 10 unit distances range from 0.1 to 1.1 soft pixels, 0.1 to 0.6 soft pixels, 0.1 to 0.3 soft pixels and less than 0.1 to 0.1soft pixels, respectively. As the spatial resolution gets coarser, the required average positional accuracy varied from 0.86 to 0.22 for overall accuracy and from 0.29 to less than 0.1 for kappa.
Table 4.
The required registration accuracy (# soft pixels) to keep the OA- and kappa-errors under 10% for different landscape characteristics at the spatial resolution of 1, 2, 5, 10 unit distances respectively. (“<” represents “less than”).
Table 4.
The required registration accuracy (# soft pixels) to keep the OA- and kappa-errors under 10% for different landscape characteristics at the spatial resolution of 1, 2, 5, 10 unit distances respectively. (“<” represents “less than”).
| P | MPS | Less than 10% OA-Error | Less than 10% Kappa-Error |
|---|
| 1 | 2 | 5 | 10 | 1 | 2 | 5 | 10 |
|---|
| 0.35 | 77.76 | 0.3 | 0.2 | 0.1 | 0.2 | 0.1 | 0.1 | 0.1 | 0.1 |
| 0.40 | 91.95 | 0.3 | 0.2 | 0.1 | 0.2 | 0.1 | 0.1 | <0.1 | 0.1 |
| 0.45 | 108.18 | 0.4 | 0.2 | 0.1 | 0.2 | 0.1 | 0.1 | <0.1 | <0.1 |
| 0.50 | 125.44 | 0.5 | 0.3 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.52 | 132.09 | 0.5 | 0.3 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.54 | 137.95 | 0.6 | 0.4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | 0.1 |
| 0.56 | 140.63 | 0.8 | 0.5 | 0.3 | 0.2 | 0.3 | 0.2 | 0.1 | 0.1 |
| 0.58 | 140.06 | 1.1 | 0.6 | 0.3 | 0.3 | 0.4 | 0.2 | 0.1 | 0.1 |
| 0.35 | 233.97 | 0.3 | 0.2 | 0.1 | 0.2 | 0.1 | 0.1 | <0.1 | 0.1 |
| 0.40 | 280.33 | 0.4 | 0.2 | 0.1 | 0.2 | 0.1 | 0.1 | <0.1 | 0.1 |
| 0.45 | 348.04 | 0.4 | 0.3 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 | <0.1 |
| 0.50 | 457.20 | 0.6 | 0.3 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.52 | 505.18 | 0.7 | 0.4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.54 | 580.05 | 0.9 | 0.5 | 0.2 | 0.2 | 0.3 | 0.2 | 0.1 | 0.1 |
| 0.56 | 615.76 | 1.1 | 0.6 | 0.3 | 0.2 | 0.4 | 0.2 | 0.1 | 0.1 |
| 0.58 | 644.76 | 1.5 | 0.8 | 0.4 | 0.3 | 0.6 | 0.3 | 0.2 | 0.1 |
| 0.35 | 1121.39 | 0.6 | 0.3 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.40 | 1234.57 | 0.6 | 0.4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.45 | 2145.92 | 0.7 | 0.4 | 0.2 | 0.2 | 0.2 | 0.1 | 0.1 | <0.1 |
| 0.50 | 2312.14 | 0.9 | 0.5 | 0.2 | 0.2 | 0.3 | 0.2 | 0.1 | <0.1 |
| 0.52 | 2496.88 | 1.0 | 0.5 | 0.3 | 0.2 | 0.4 | 0.2 | 0.1 | <0.1 |
| 0.54 | 3338.90 | 1.2 | 0.6 | 0.3 | 0.2 | 0.4 | 0.2 | 0.1 | <0.1 |
| 0.56 | 3883.50 | 1.7 | 0.9 | 0.4 | 0.3 | 0.6 | 0.3 | 0.1 | 0.1 |
| 0.58 | 5340.45 | 2.8 | 1.4 | 0.6 | 0.4 | 1.1 | 0.6 | 0.3 | 0.1 |
| Average | 0.85 | 0.46 | 0.23 | 0.22 | 0.29 | 0.17 | 0.12 | <0.1 |
4. Discussion
Quantifying the accuracy of sub-pixel land cover maps derived from the soft classification of remote sensing images is crucial for the future development of fields such as ecological and environmental modeling which incorporate land cover information as an important variable. The error matrix has been widely applied for accuracy assessment because of its practicality and effectiveness. Recent research has shown that much effort has been made to generalize a soft classification error matrix from the traditional one. The soft error matrix has the same accuracy measures as the traditional one. However, the impact of positional error on the soft classification thematic accuracy is uncertain and has not been addressed explicitly. In this paper, the impact of positional errors on thematic accuracy of soft classification was examined including the effects introduced by landscape structure and spatial resolution. A series of soft classifications with varied landscape patterns and the corresponding reference data were simulated and a sub-pixel misregistration model was implemented. The thematic errors caused by positional errors were reported using overall accuracy and kappa.
Our results showed that the effects of positional error on thematic accuracy as computed from a soft error matrix cannot be ignored. Most previous research in this field on the impact of positional accuracy on thematic accuracy used Landsat Thematic Mapper (TM) imagery and did not examine soft classification. Our work employed artificially generated maps representing various landscape patterns and simulation of soft classifications making our results difficult to directly compare to the previous work. However, there are still some important similarities between our work and this previous work. Patterson and Williams [
36] reported that positional error could reach up to one pixel and could be located anywhere in a 3 × 3 pixel grouping [
37]. Given this amount of positional error, the results of our simulations showed errors of overall accuracy ranging from 4.12% to 34.3%, whereas the error of kappa ranged from 8.47% to 71.76%. Kappa is more sensitive to the positional error largely because kappa uses the off-diagonal elements of the error matrix in the calculation of the statistic, whereas overall accuracy does not. These results are consistent with [
19,
38] who indicated that 30% percent of thematic errors were attributed to misregistration for Landsat pixels. Therefore, the results of this research provide further confirmation of previous work.
This paper determined that a half-pixel (as determined for Landsat Thematic Mapper imagery) is not appropriate for all spatial resolutions when performing a soft classification accuracy assessment. In this paper, a half-pixel was found to be sufficient only when the map used was of 1 unit distance spatial resolution. As the spatial resolution becomes coarser, the positional requirement increases. Therefore, the positional accuracy standard for the soft classification accuracy assessment should be updated and the future requirement for registration accuracy must consider the spatial resolution of the imagery. In reality, the half-pixel standard was defined from the application of SPOT and Landsat TM imagery [
14,
39]. Whether this is suitable for the MODIS and other remotely sensed images with lower spatial resolution also needs to be examined. From our research, we can deduce that the required positional accuracy for MODIS is greater than the half-pixel required for SPOT and Landsat TM.
In the past few years, much effort has been made to develop complicated algorithms for generalizing the conventional error matrix to the soft error matrix [
7,
8]. However, requirements suitable for the hard classification accuracy may not be suitable for the soft one. We suggest examining the assumptions, procedures, and accuracy measures created for the hard error matrix and applying these for the soft classification accuracy assessment including sampling scheme and explanation of accuracy measures. This research has also provided some insights when considering the sampling location for collecting the reference data for comparison with the map in creating the error matrix. It has shown that the chance of misclassifying a pixel increased in places where the patch size was smaller and heterogeneity was higher [
20,
40]. The aim of any sampling design for accuracy assessment is to present these thematic errors proportionally in the error matrix and, therefore, a great deal of effort had been made to develop the most efficient sampling schemes to minimize the sampling error [
41,
42]. However, the existence of positional error introduces false information into the error matrix, thereby causing more error than just the error due to sampling. In addition, the influence of the positional error was also higher where the landscape was more heterogeneous with smaller patch size, especially when the spatial resolution was higher. Therefore, sampling in only the homogeneous areas will result in overestimating the accuracy [
43] but sampling that includes the heterogeneous areas risks increasing the false accuracy information. How to design sampling schemes considering positional errors requires further research.
Our research has complemented the efforts to assess the impact of positional error on the thematic accuracy under different spatial resolutions and spatial characteristics of landscape for soft classification. This impact was a function of landscape variables, degree of registration, and spatial resolution. At high spatial resolutions we noted that the more fragmented and the smaller patch sizes of the landscape, the greater the effect of positional error. However, at lower spatial resolutions, the trend noted for higher spatial resolutions changed. This trend reversal for lower spatial resolutions can be explained in that the larger pixel sizes have more chance to shift to a new location, although the proportion of class membership within the pixel remains similar when the landscape is heterogeneous. Therefore, it appears as if the pixel has not moved even though it has.
This research has also provided some implications for soft change detection analysis. If the reference map and classification map in this paper are treated as two maps from different dates, all the results and conclusions are suitable for the change detection using soft classification. These results then complement the work of [
16] who examined the requirement of positional accuracy for change detection using hard classification for Landsat TM data and concluded that less than one-fifth of a pixel is required to achieve a change detection error of less than 10%.
A number of limitations also remain. First, this research only employs artificial images to create landscape patterns, and the differences between these simulated images and real satellite images need consideration. Second, this research only took into account two classes with fixed class proportions as dictated by the Modified Random Clusters model for simulation. Simulating more than two classes with different spatial characteristics is difficult to keep the proportion of classes the same. We can speculate that more classes will increase the impact of the positional errors because it increases the fragmentation and decreases the patch size. We can also deduce that one dominating class with other minor classes will decrease the impact because it increases the mean patch size. Finally, this paper ignored the distribution of the positional errors. Positional errors are not equally distributed over the spatial map [
12] and the modeling of the distribution of the positional errors will be a task for future research.
5. Conclusions
This paper conducted an analysis of the impact of positional error on thematic accuracy for soft accuracy assessment using simulated maps of various landscape patterns at different spatial resolutions. Some of the results of this work were quite predictable, while others were not, thus having specific implications on the impact of positional error on thematic error when assessing map accuracy. Not surprisingly, increased fragmentation of the landscape increased the impact of positional error on thematic accuracy. Also not surprisingly, initially larger pixels increased the impact of positional error on thematic accuracy as the larger pixels cause increased fragmentation. However, what is surprising is that this trend did not continue as the pixel size increased. Instead, the larger pixels reached a point in which the proportion of map classes within a large, soft pixel reached an equilibrium regardless of the positional error. This result has special significance when considering low spatial resolution imagery such as AVHRR or MODIS data. Another very interesting and practical result of our work showed that a half-pixel is not sufficient to keep the thematic error under 10% for all spatial resolutions for soft classification accuracy assessment. A half-pixel registration error is commonly accepted for moderate resolution imagery such as Landsat Thematic Mapper and SPOT. A 10% error contribution from positional error is a reasonable amount that might be accepted in a thematic map accuracy assessment. However, at various spatial resolutions tested in this study, it was determined that a half-pixel registration error does not keep the thematic error under 10%. Detailed figures were provided to allow the reader to determine the impact of positional error at varying landscape patterns and spatial resolutions. Finally, the impact of positional error on the thematic accuracy changes with variation in landscape variables, degree of registration, and spatial resolution. There is a great need to update the positional requirements for soft accuracy assessment according to the map spatial resolution and landscape structure. In addition, the results and conclusions in this paper are also suitable for soft change detection analysis. Careful consideration of the issues and analysis described in this paper will result in improved soft accuracy assessment in the future.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








